Love Wave Sensor with High Penetration Depth for Potential Application in Cell Monitoring

 ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
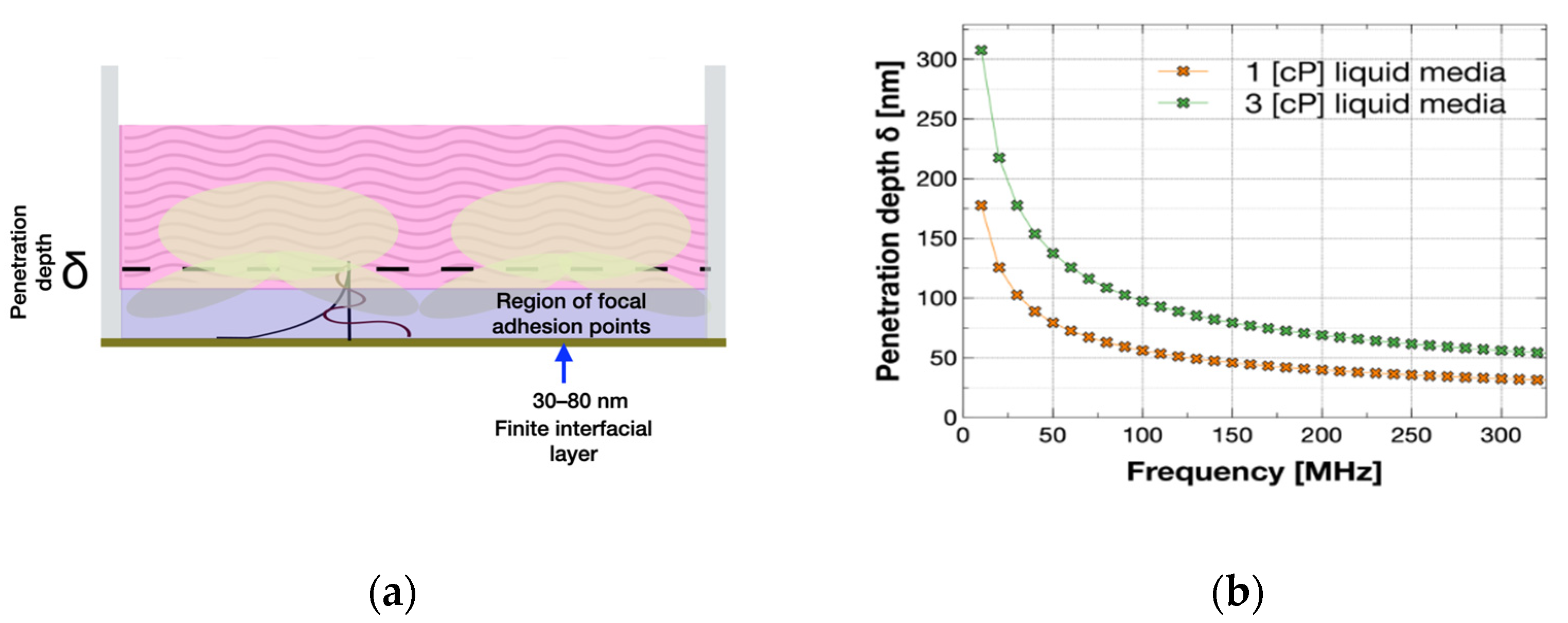
2.1. Love Wave Sensor Design Considerations
2.2. Sensor Simulation
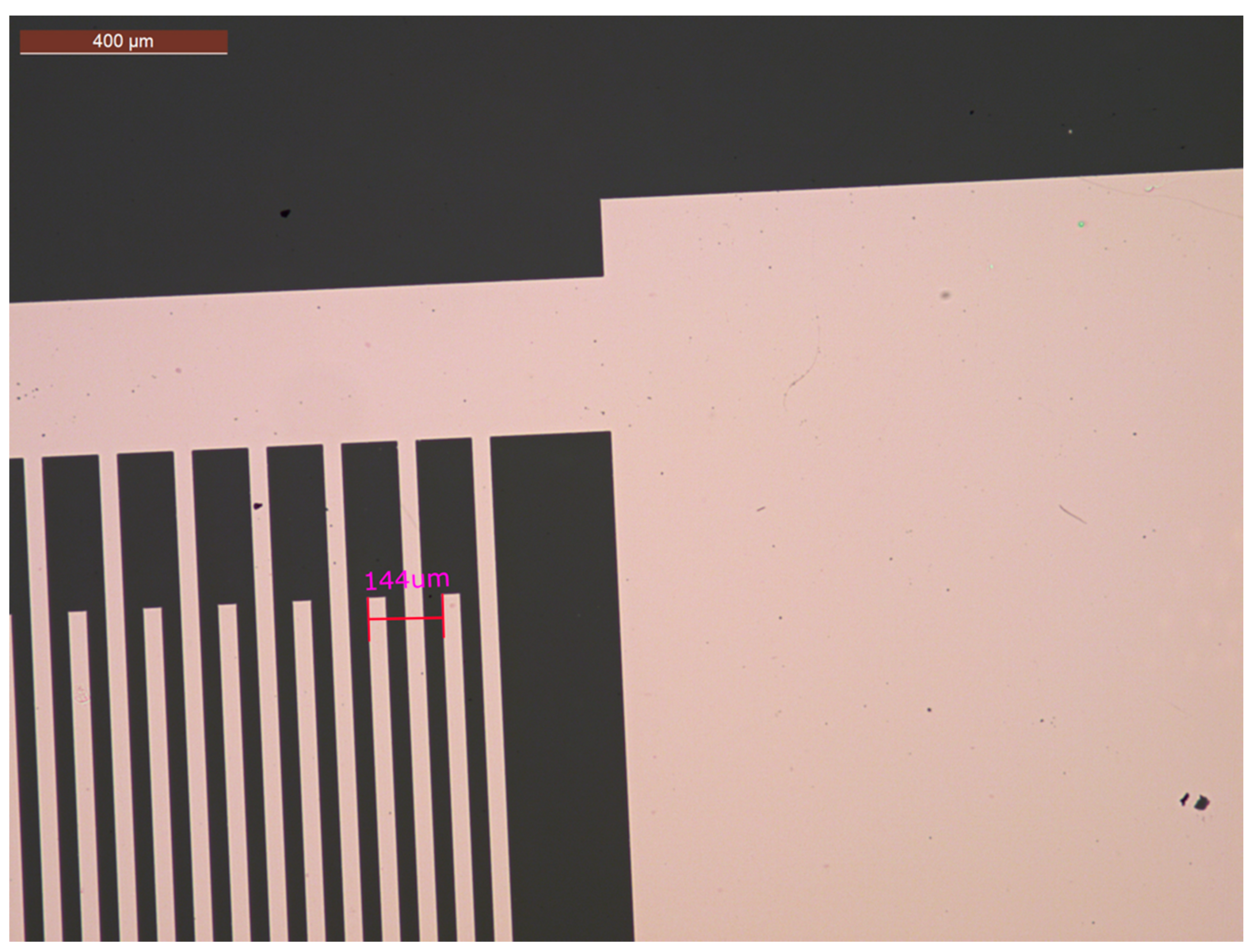
2.3. Sensor Fabrication
2.3.1. SU-8 Guiding Layer Development
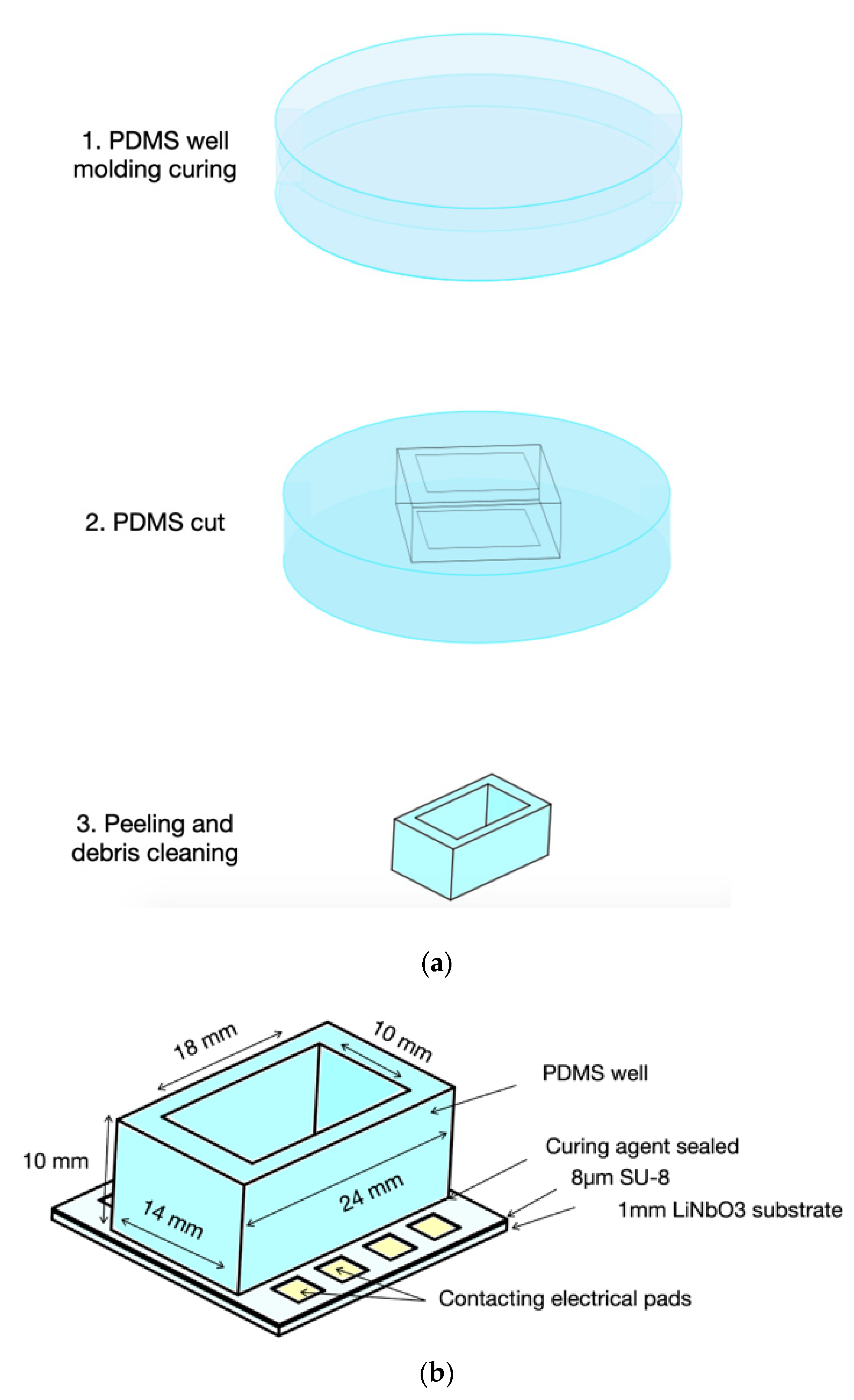
2.3.2. Fluidic Chamber
2.4. Characterization Setup
2.5. Glycerol Solutions Characterization
2.6. Measurements with SaOs-2 Cells
3. Results
3.1. IDT’s Response
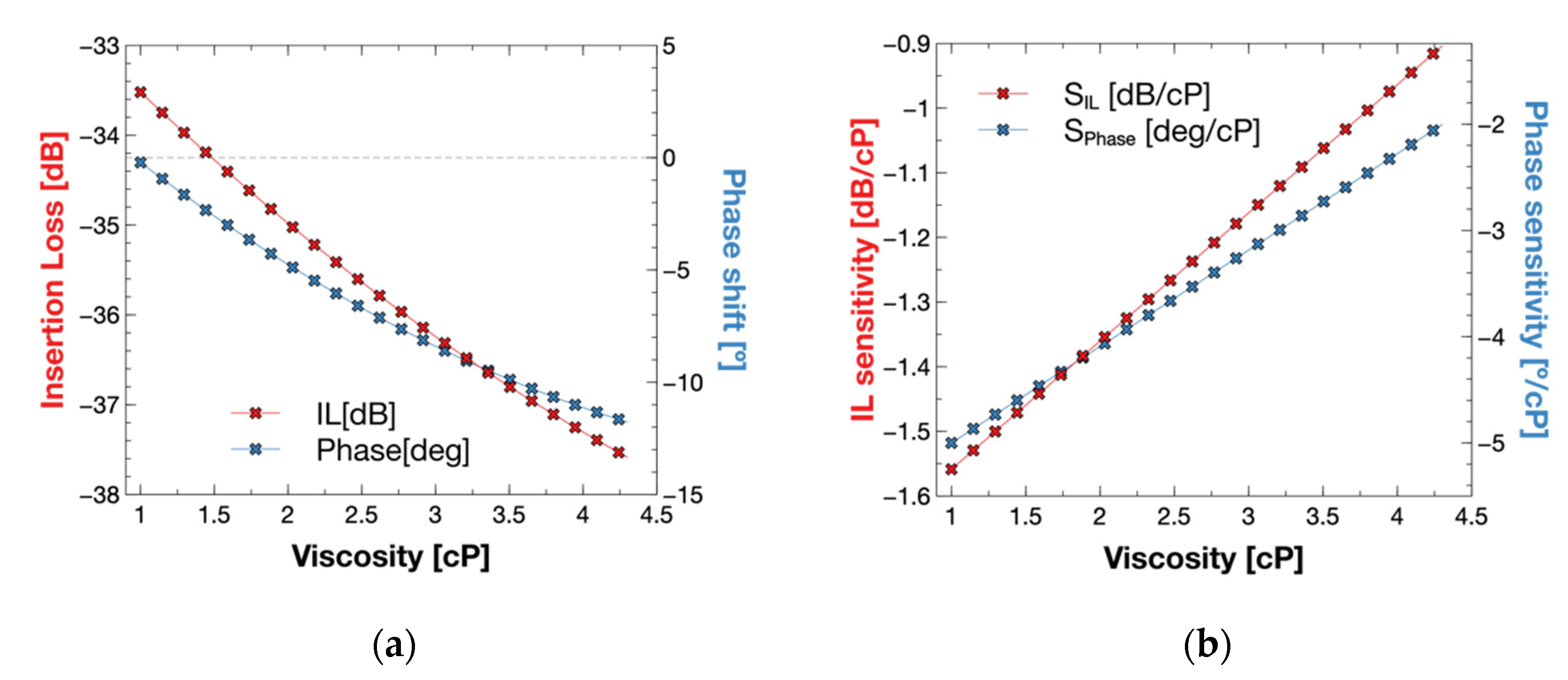
3.2. Model Response and Sensitivity of the Sensor
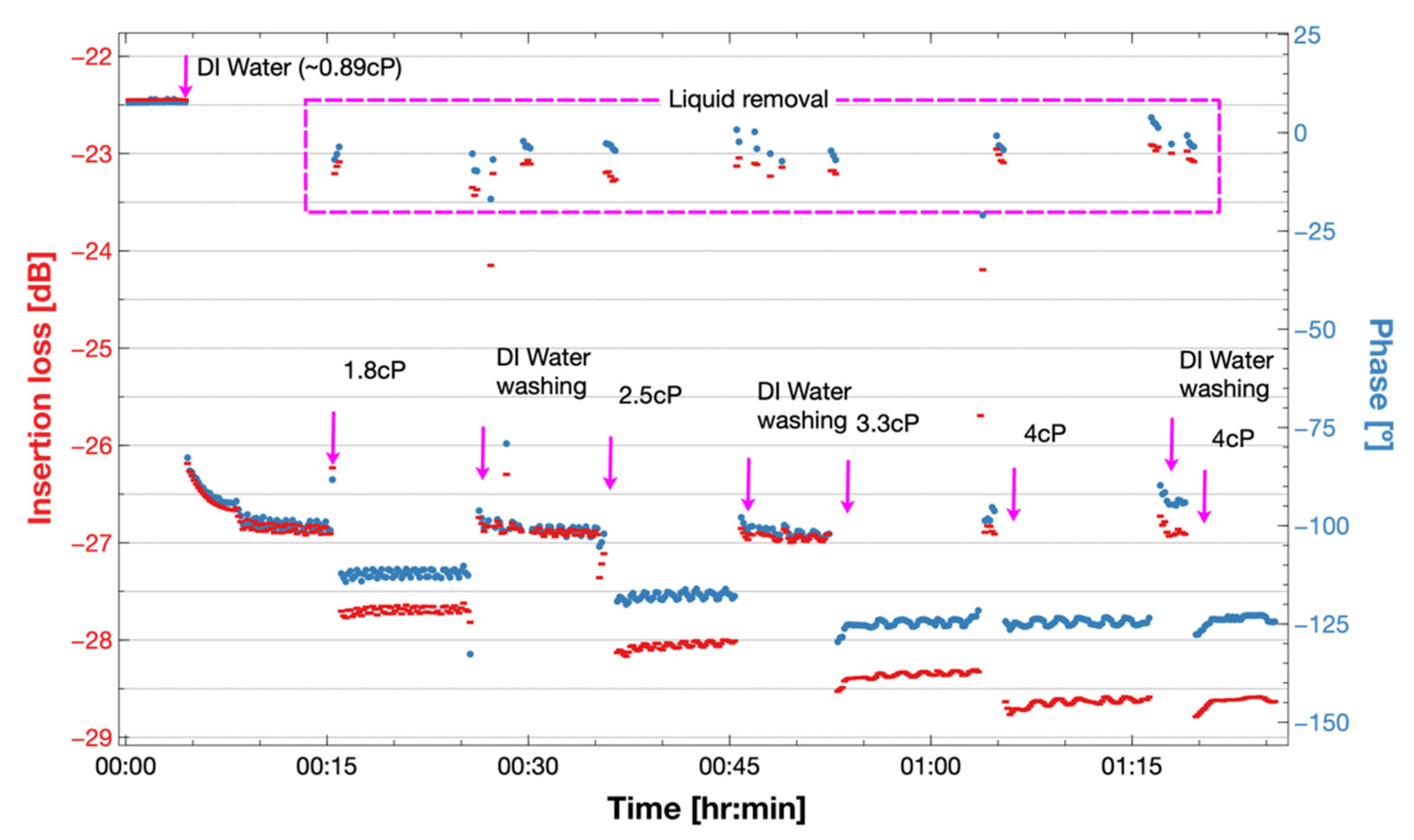
3.3. Response to Glycerol Solutions
3.4. Measurements with Cells
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, F.; Wang, J.H.-C.; Wang, Q.-M. Thickness Shear Mode Acoustic Wave Sensors for Characterizing the Viscoelastic Properties of Cell Monolayer. Sens. Actuators B Chem. 2008, 128, 399–406. [Google Scholar] [CrossRef]
- Wu, H.; Zhao, G.; Zu, H.; Wang, J.H.-C.; Wang, Q.-M. Aging-Related Viscoelasticity Variation of Tendon Stem Cells (TSCs) Characterized by Quartz Thickness Shear Mode (TSM) Resonators. Sens. Actuators B Chem. 2015, 210, 369–380. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Saitakis, M.; Tsortos, A.; Gizeli, E. Probing the Interaction of a Membrane Receptor with a Surface-Attached Ligand Using Whole Cells on Acoustic Biosensors. Biosens. Bioelectron. 2010, 25, 1688–1693. [Google Scholar] [CrossRef]
- Kanazawa, K.K.; Gordon, J.G. The Oscillation Frequency of a Quartz Resonator in Contact with Liquid. Anal. Chim. Acta 1985, 175, 99–105. [Google Scholar] [CrossRef]
- Wu, H. Acoustic Wave Biosensors for Biomechanical and Biological Characterization of Cells; University of Pittsburgh ETD: Pittsburgh, PA, USA, 2017. [Google Scholar]
- Faber, T.E. Fluid Dynamics for Physicists; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Martin, S.J.; Ricco, A.J.; Niemczyk, T.M.; Frye, G.C. Characterization of SH Acoustic Plate Mode Liquid Sensors. Sens. Actuators 1989, 20, 253–268. [Google Scholar] [CrossRef]
- Du, G.; Ravetto, A.; Fang, Q.; den Toonder, J.M. Cell Types Can Be Distinguished by Measuring Their Viscoelastic Recovery Times Using a Micro-Fluidic Device. Biomed. Microdevices 2011, 13, 29–40. [Google Scholar] [CrossRef] [Green Version]
- Lekka, M. Discrimination Between Normal and Cancerous Cells Using AFM. BioNanoScience 2016, 6, 65–80. [Google Scholar] [CrossRef] [Green Version]
- Rebelo, L.M.; de Sousa, J.S.; Mendes Filho, J.; Radmacher, M. Comparison of the Viscoelastic Properties of Cells from Different Kidney Cancer Phenotypes Measured with Atomic Force Microscopy. Nanotechnology 2013, 24, 055102. [Google Scholar] [CrossRef]
- Rocha-Gaso, M.I.; Jimenez, Y.; Laurent, F.A.; Arnau, A. Love Wave Biosensors: A Review. Available online: https://www.intechopen.com/chapters/43454 (accessed on 14 January 2022).
- Kiełczyński, P. Properties and Applications of Love Surface Waves in Seismology and Biosensors. Available online: https://www.intechopen.com/chapters/60627 (accessed on 14 January 2022).
- Zhang, X.; Fang, J.; Zou, L.; Zou, Y.; Lang, L.; Gao, F.; Hu, N.; Wang, P. A Novel Sensitive Cell-Based Love Wave Biosensor for Marine Toxin Detection. Biosens. Bioelectron. 2016, 77, 573–579. [Google Scholar] [CrossRef]
- Wu, H.; Zu, H.; Wang, Q.M.; Zhao, G.; Wang, J.H.C. Monitoring the Adhesion Process of Tendon Stem Cells Using Shear-Horizontal Surface Acoustic Wave Sensors. In Proceedings of the 2015 Joint Conference of the IEEE International Frequency Control Symposium the European Frequency and Time Forum, Denver, CO, USA, 12–16 April 2015; pp. 310–315. [Google Scholar]
- Fu, Y.Q.; Luo, J.K.; Nguyen, N.-T.; Walton, A.J.; Flewitt, A.J.; Zu, X.-T.; Li, Y.; McHale, G.; Matthews, A.; Iborra, E. Advances in Piezoelectric Thin Films for Acoustic Biosensors, Acoustofluidics and Lab-on-Chip Applications. Prog. Matter. Sci. 2017, 89, 31–91. [Google Scholar] [CrossRef] [Green Version]
- Roach, P. SU-8 Guiding Layer for Love Wave Devices. Sensors 2007, 7, 2539–2547. [Google Scholar] [CrossRef] [PubMed]
- Bender, F.; Mohler, R.E.; Ricco, A.J.; Josse, F. Analysis of Binary Mixtures of Aqueous Aromatic Hydrocarbons with Low-Phase-Noise Shear-Horizontal Surface Acoustic Wave Sensors Using Multielectrode Transducer Designs. Anal. Chem. 2014, 86, 11464–11471. [Google Scholar] [CrossRef] [PubMed]
- Campbell, C. Surface Acoustic Wave Devices and Their Signal Processing Applications; Elsevier: Amsterdam, The Neatherlands, 2012. [Google Scholar]
- Francis, L.A.; Friedt, J.-M.; Zhou, C.; Bertrand, P. In Situ Evaluation of Density, Viscosity, and Thickness of Adsorbed Soft Layers by Combined Surface Acoustic Wave and Surface Plasmon Resonance. Anal. Chem. 2006, 78, 4200–4209. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Oliner, A.A. Microwave Network Methods for Guided Elastic Waves. IEEE Trans. Microw. Theory Tech. 1969, 17, 812–826. [Google Scholar] [CrossRef]
- Auld, B. Acoustic Fields and Waves in Solids; Wiley: New York, NY, USA, 1973. [Google Scholar]
- Ueda, K.; Kondoh, J. Estimation of Liquid Properties by Inverse Problem Analysis Based on Shear Horizontal Surface Acoustic Wave Sensor Responses. Jpn. J. Appl. Phys. 2017, 56, 07JD08. [Google Scholar] [CrossRef] [Green Version]
- Dieulesaint, E.; Royer, D. Propagation et Génération Des Ondes Élastiques. Tech. L’ingénieur. Electron. 2001, 4, E3210-1. [Google Scholar]
- Hossenlopp, J.; Jiang, L.; Cernosek, R.; Josse, F. Characterization of Epoxy Resin (SU-8) Film Using Thickness-Shear Mode (TSM) Resonator under Various Conditions. J. Polym. Sci. Part B Polym. Phys. 2004, 42, 2373–2384. [Google Scholar] [CrossRef] [Green Version]
- Renaudin, A.; Chabot, V.; Grondin, E.; Aimez, V.; Charette, P.G. Integrated Active Mixing and Biosensing Using Surface Acoustic Waves (SAW) and Surface Plasmon Resonance (SPR) on a Common Substrate. Lab Chip 2010, 10, 111–115. [Google Scholar] [CrossRef]
- Mercier, D.; Bordel, G.; Brunet-Manquat, P.; Verrun, S.; Elmazria, O.; Sarry, F.; Belgacem, B.; Bounoua, J. Characterization of a SAW-Pirani Vacuum Sensor for Two Different Operating Modes. Sens. Actuators A Phys. 2012, 188, 41–47. [Google Scholar] [CrossRef]
- Wang, T.; Green, R.; Nair, R.; Howell, M.; Mohapatra, S.S.; Guldiken, R.; Mohapatra, S.S. Surface Acoustic Waves (SAW)-Based Biosensing for Quantification of Cell Growth in 2D and 3D Cultures. Sensors 2015, 15, 32045–32055. [Google Scholar] [CrossRef]
- Hillairet, J. RF Network Analysis of the WEST ICRH Antenna with the Open-Source Python Scikit-RF Package. AIP Conf. Proc. 2020, 2254, 070010. [Google Scholar] [CrossRef]
- Arsenovic, A.; Hillairet, J.; Anderson, J.; Forstén, H.; Rieß, V.; Eller, M.; Sauber, N.; Weikle, R.; Barnhart, W.; Forstmayr, F. Scikit-Rf: An Open Source Python Package for Microwave Network Creation, Analysis, and Calibration [Speaker’s Corner]. IEEE Microw. Mag. 2022, 23, 98–105. [Google Scholar] [CrossRef]
- Kovacs, G.; Vellekoop, M.J.; Haueis, R.; Lubking, G.W.; Venema, A. A Love Wave Sensor for (Bio)Chemical Sensing in Liquids. Sens. Actuators A. Phys. 1994, 43, 38–43. [Google Scholar] [CrossRef]
- Cheng, N.-S. Formula for the Viscosity of a Glycerol- Water Mixture. Ind. Eng. Chem. Res. 2008, 47, 3285–3288. [Google Scholar] [CrossRef]
- Haynes, W.M.; Lide, D.R.; Bruno, T.J. CRC Handbook of Chemistry and Physics: A Ready-Reference Book of Chemical and Physical Data; CRC Press: Boca Raton, FL, USA, 2016; ISBN 978-1-4987-5428-6. [Google Scholar]
- Rocha-Gaso, M.I. Analysis, Implementation and Validation of a Love Mode Surface Acoustic Wave Device for Its Application as Sensor of Biological Processes in Liquid Media. Doctoral Dissertation, Editorial Universitat Politècnica de València, Valencia, Spain, 2013. [Google Scholar]
- Turton, A.; Bhattacharyya, D.; Wood, D. Liquid Density Analysis of Sucrose and Alcoholic Beverages Using Polyimide Guided Love-Mode Acoustic Wave Sensors. Meas. Sci. Technol. 2006, 17, 257–263. [Google Scholar] [CrossRef] [Green Version]
- Furniss, J.; Qin, L.; Ng, S.; Voiculescu, I.; Li, F. Love Mode Surface Acoustic Wave and Impedance Sensors for Water Toxicity Sensing. Environ. Prog. Sustain. Energy 2018, 37, 172–179. [Google Scholar] [CrossRef]
- Oseev, A.; Mukhin, N.; Elie-Caille, C.; Boireau, W.; Lucklum, R.; Lecompte, T.; Remy-Martin, F.; Manceau, J.-F.; Chollet, F.; Leblois, T. Topology Challenge for the Assessment of Living Cell Deposits with Shear Bulk Acoustic Biosensor. Nanomaterials 2020, 10, 2079. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Experiment | Viscosity cP | Rigidity kPa | References |
|---|---|---|---|
| Confluent cell monolayer of MC-3T3 cells | 1.52–1.56 | 48–49 | [1] |
| Confluent cell monolayer of young TSC cells | 1.86 | 0.9 | [5] |
| Confluent cell monolayer of aged TSC cells | 2.17 | 21 | [5] |
| Layer | Material | Density (ρ) | Shear Modulus (μ) GPa | Viscosity (η) Pa·s | Layer Thickness (h) µm |
|---|---|---|---|---|---|
| Substrate | LiNbO3 | 4650 | 86.3 | 0 | - |
| 1 | Cr | 7190 | 115 | 0 | 0.010 |
| 2 | Au | 19,300 | 28.5 | 0 | 0.165 |
| 3 | SU-8 | 1100 | 1.21 | 0.12 * | 8 |
| Solution | Viscosity (ρ) cP | Density (ρ) | Glycerol w/w % |
|---|---|---|---|
| water | 0.893 | 997 | 0 |
| 1.8 cP | 1.8 | 1058.2 | 25.2 |
| 2.5 cP | 2.5 | 1082 | 34.4 |
| 3.3 cP | 3.3 | 1100 | 41.2 |
| 4 cP | 4 | 1111.4 | 45.44 |
| Step | Value | Time |
|---|---|---|
| AZ5214E Spin coating | 4000 rpm | 40 s |
| Hotplate step | 110 °C | 66 s |
| Alignment and exposition | MJB4 Hg-Lamp 7 mW/cm² | 4.7 s |
| Hotplate inversion step | 120 °C | 140 s |
| UV flood exposure | MJB4 Hg-Lamp 7 mW/cm² | 35 s |
| Development | AZMIF726 Developer | 20 s |
| Step | Value | Time |
|---|---|---|
| Plasma oxygen on substrate | 100 W | 60 s |
| Primer HDMS spin coat | 4000 rpm | 40 s |
| Hotplate | 115 °C | 60 s |
| SU-8 spin coat | 500 rpm + 6000 rpm | 10 s + 60 s |
| Hotplate | 115 °C + 150 °C | 60 s + 170 s |
| Alignment and exposition * | MJB4 Hg-Lamp 7 mW/cm² | 24 s |
| Hotplate | 115 °C | 215 s |
| Development | SU-8 Developer | 60 s + 10 s |
| Rinse | IPA | 30 s |
| Dry | N2 | 20 s |
| Hotplate | 150 °C | 60 min |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Segura Chávez, P.A.; Bonhomme, J.; Bellaredj, M.L.F.; Olive, L.; Beyssen, D.; Oudich, M.; Charette, P.G.; Sarry, F. Love Wave Sensor with High Penetration Depth for Potential Application in Cell Monitoring. Biosensors 2022, 12, 61. https://doi.org/10.3390/bios12020061
Segura Chávez PA, Bonhomme J, Bellaredj MLF, Olive L, Beyssen D, Oudich M, Charette PG, Sarry F. Love Wave Sensor with High Penetration Depth for Potential Application in Cell Monitoring. Biosensors. 2022; 12(2):61. https://doi.org/10.3390/bios12020061
Chicago/Turabian StyleSegura Chávez, Pedro A., Jérémy Bonhomme, Mohamed Lamine Fayçal Bellaredj, Lucile Olive, Denis Beyssen, Mourad Oudich, Paul G. Charette, and Frédéric Sarry. 2022. "Love Wave Sensor with High Penetration Depth for Potential Application in Cell Monitoring" Biosensors 12, no. 2: 61. https://doi.org/10.3390/bios12020061