Cognitive Spectrum Sensing with Multiple Primary Users in Rayleigh Fading Channels


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
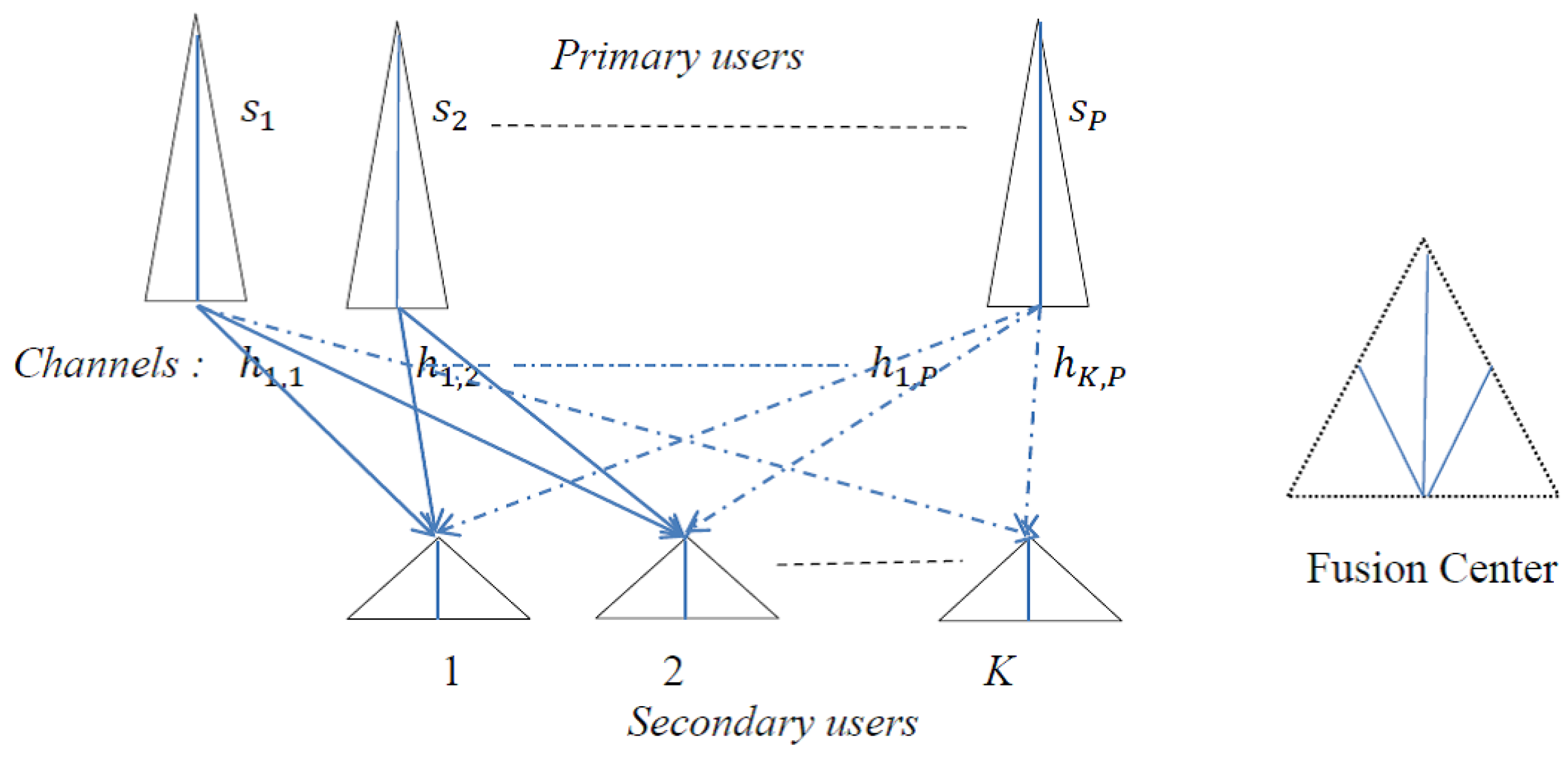
2. System Description

2.1. Detection Parameters
3. Spectrum Sensing in Rayleigh Multipath Fading Channel
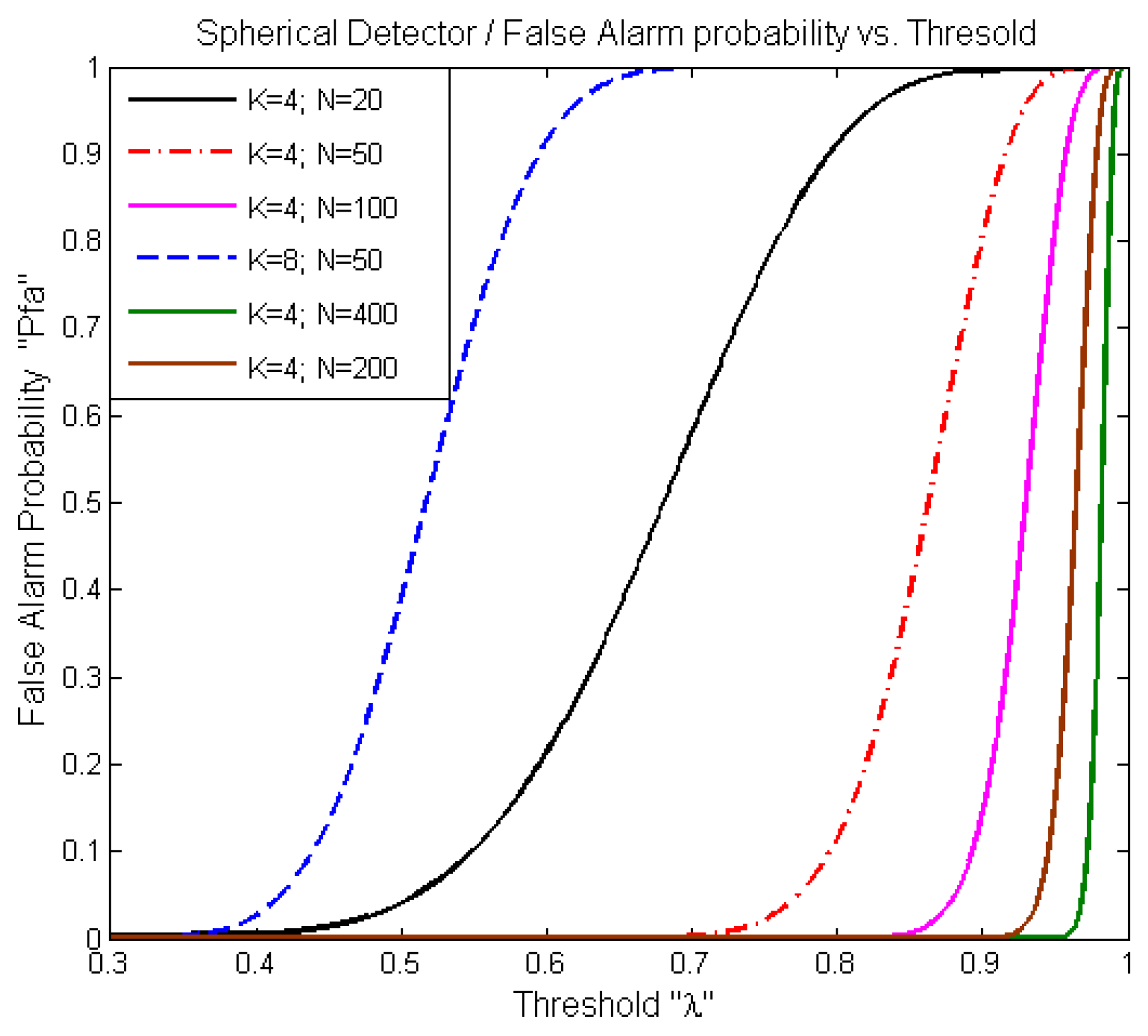
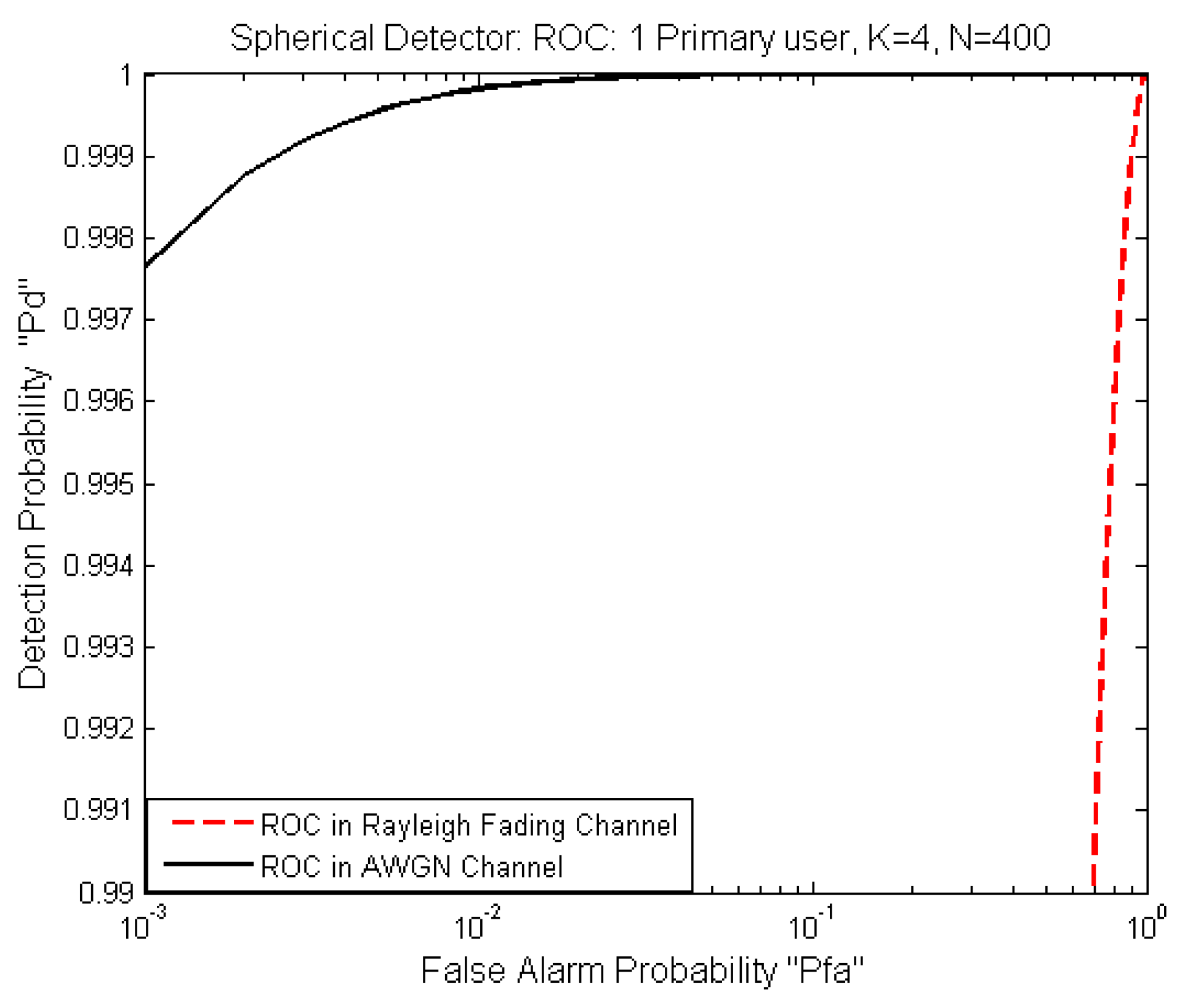
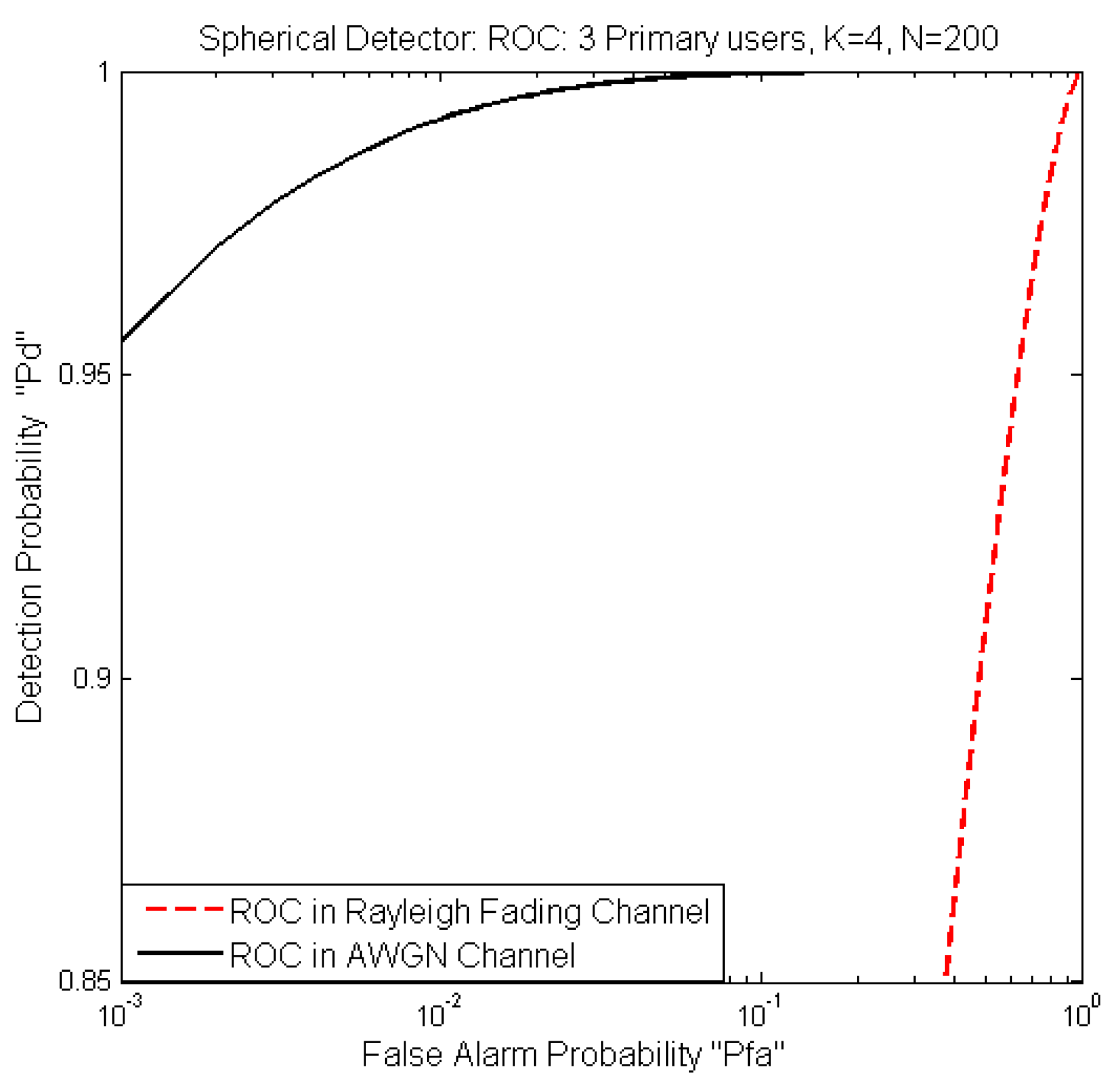
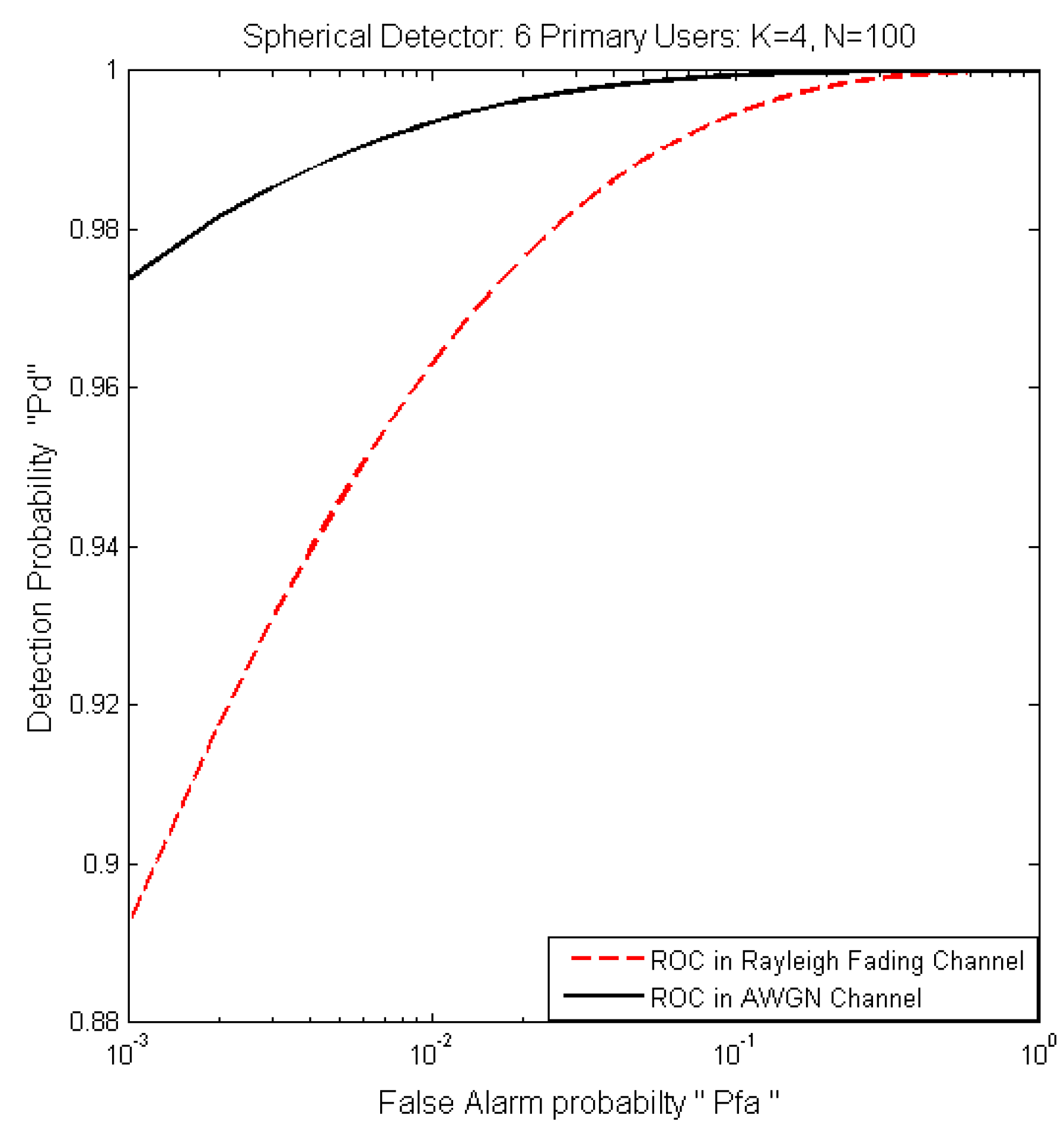
4. Simulation Results




5. Conclusions
Acknowledgements
Author Contributions
Conflicts of Interest
References
- Mitola, J. Cognitive radio for flexible mobile multimedia communications. In Proceedings of the (MoMuC ’99) 1999 IEEE International Workshop on Mobile Multimedia Communications, San Diego, CA, USA, 15–17 November 1999; pp. 3–10.
- Haykin, S. Cognitive radio: Brain-empowered wireless communications. IEEE J. Sel. Areas Commun. 2005, 23, 201–220. [Google Scholar] [CrossRef]
- Zeng, Y.; Koh, C.; Liang, Y.-C. Maximum eigenvalue detection: Theory and application. In Proceedings of the IEEE International Conference on Communications, 2008. ICC ’08, Beijing, China, 19–23 May 2008; pp. 4160–4164.
- Urkowitz, H. Energy detection of unknown deterministic signals. Proc. IEEE 1967, 55, 523–531. [Google Scholar] [CrossRef]
- Kostylev, V. Energy detection of a signal with random amplitude. In Proceedings of the IEEE International Conference on Communications, 2002. ICC 2002, New York, NC, USA, 28 April–2 May 2002; Volume 3, pp. 1606–1610.
- Digham, F.; Alouini, M.-S.; Simon, M.K. On the energy detection of unknown signals over fading channels. IEEE Trans. Commun. 2007, 55, 21–24. [Google Scholar] [CrossRef]
- Zeng, Y.; Liang, Y.-C. Eigenvalue-based spectrum sensing algorithms for cognitive radio. IEEE Trans. Commun. 2009, 57, 1784–1793. [Google Scholar] [CrossRef]
- Taherpour, A.; Nasiri-Kenari, M.; Gazor, S. Multiple antenna spectrum sensing in cognitive radios. IEEE Trans. Wirel. Commun. 2010, 9, 814–823. [Google Scholar] [CrossRef]
- Gardner, W. Signal interception: A unifying theoretical framework for feature detection. IEEE Trans. Commun. 1988, 36, 897–906. [Google Scholar] [CrossRef]
- Sutton, P.; Nolan, K.; Doyle, L. Cyclostationary signatures in practical cognitive radio applications. IEEE J. Sel. Areas Commun. 2008, 26, 13–24. [Google Scholar] [CrossRef]
- Penna, F.; Garello, R.; Spirito, M. Cooperative spectrum sensing based on the limiting eigenvalue ratio distribution in wishart matrices. Commun. Lett. IEEE 2009, 13, 507–509. [Google Scholar] [CrossRef]
- Wei, L.; Tirkkonen, O. Cooperative spectrum sensing of ofdm signals using largest eigenvalue distributions. In Proceedings of the 2009 IEEE 20th International Symposium on Personal, Indoor and Mobile Radio Communications, Tokyo, Japan, 13–16 September 2009; pp. 2295–2299.
- Zeng, Y.; Liang, Y.-C.; Zhang, R. Blindly combined energy detection for spectrum sensing in cognitive radio. Signal Process. Lett. IEEE 2008, 15, 649–652. [Google Scholar] [CrossRef]
- Wang, P.; Fang, J.; Han, N.; Li, H. Multiantenna-assisted spectrum sensing for cognitive radio. IEEE Trans. Veh. Technol. 2010, 59, 1791–1800. [Google Scholar] [CrossRef]
- Bianchi, P.; Debbah, M.; Maida, M.; Najim, J. Performance of statistical tests for single-source detection using random matrix theory. IEEE Trans. Inf. Theory 2011, 57, 2400–2419. [Google Scholar] [CrossRef] [Green Version]
- Digham, F.; Alouini, M.-S.; Simon, M.K. On the energy detection of unknown signals over fading channels. In Proceedings of the IEEE International Conference on Communications, 2003. ICC ’03, Anchorage, AK, USA, 11–15 May 2003; Volume 5, pp. 3575–3579.
- Olabiyi, O.; Alam, S.; Odejide, O.; Annamalai, A. Further results on the energy detection of unknown deterministic signals over generalized fading channel. In Proceedings of the 2011 IEEE GLOBECOM Workshops (GC Wkshps), Houston, TX, USA, 5–9 December 2011; pp. 908–912.
- Herath, S.; Rajatheva, N. Analysis of equal gain combining in energy detection for cognitive radio over nakagami channels. In Proceedings of the IEEE GLOBECOM 2008. IEEE Global Telecommunications Conference, New Orleans, LA, USA, 30 November–4 December 2008; 2008; pp. 1–5. [Google Scholar]
- Herath, S.; Rajatheva, N.; Tellambura, C. Energy detection of unknown signals in fading and diversity reception. IEEE Trans. Commun. 2011, 59, 2443–2453. [Google Scholar] [CrossRef]
- Pandharipande, A.; Linnartz, J.-P. Performance analysis of primary user detection in a multiple antenna cognitive radio. In Proceedings of the IEEE International Conference on Communications, 2007. ICC ’07, Glasgow, UK, 24–28 June 2007; pp. 6482–6486.
- Hussain, S.; Fernando, X. Closed-form analysis of relay-based cognitive radio networks over nakagami-m fading channels. IEEE Trans. Veh. Technol. 2014, 63, 1193–1203. [Google Scholar] [CrossRef]
- Wei, L.; Tirkkonen, O. Spectrum sensing in the presence of multiple primary users. IEEE Trans. Commun. 2012, 60, 1268–1277. [Google Scholar] [CrossRef]
- Zhang, R.; Lim, T.J.; Liang, Y.-C.; Zeng, Y. Multi-antenna based spectrum sensing for cognitive radios: A glrt approach. IEEE Trans. Commun. 2010, 58, 84–88. [Google Scholar] [CrossRef]
- Sklar, B. Digital Communications:Fundamentals and Applications, ser. Prentice Halls International editions. Prentice-Hall. 1988. Available online: http://books.google.ca/books?id=HbW3QgAACAAJ (accessed on 23 April 2014).
- Simon, M.K.; Alouini, M.-S. Digital Communication over Fading Channels; JOHN WILEY and SONS, Inc.: Hoboken, NJ, USA, 2005; ISBN 0-471-20069-7. [Google Scholar]
- Sharkasi, Y.; McLernon, D.; Ghogho, M. Cooperative spectrum sensing over frequency-selective nakagami-m fading channels. In Proceedings of the Sensor Signal Processing for Defence (SSPD 2012), London, UK, 25–27 September 2012; pp. 1–5.
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Al-Juboori, S.; Hussain, S.J.; Fernando, X. Cognitive Spectrum Sensing with Multiple Primary Users in Rayleigh Fading Channels. Electronics 2014, 3, 553-563. https://doi.org/10.3390/electronics3030553
Al-Juboori S, Hussain SJ, Fernando X. Cognitive Spectrum Sensing with Multiple Primary Users in Rayleigh Fading Channels. Electronics. 2014; 3(3):553-563. https://doi.org/10.3390/electronics3030553
Chicago/Turabian StyleAl-Juboori, Salam, Sattar J. Hussain, and Xavier Fernando. 2014. "Cognitive Spectrum Sensing with Multiple Primary Users in Rayleigh Fading Channels" Electronics 3, no. 3: 553-563. https://doi.org/10.3390/electronics3030553