
IDC Robocon: A Transnational Teaming Competition for Project-Based Design Education in Undergraduate Robotics

 ,
,  ,
,
Abstract
:1. Introduction
1.1. Robotics Competitions
1.2. IDC Robocon
- Universities are increasingly embracing project-based learning with in-built competitive elements. Robocon seeks to introduce this competitive element to students who may not have encountered it before.
- Competitive robotic challenges normally pit teams from same university against each other. Robocon seeks to promote diversity and understanding across cultures/race/religion.
- The theme is not announced to participants until the actual challenge, so no team gets any advantage.
2. Unique Pedagogical Approaches
2.1. Fast Learning
2.2. Project-Based and Competitive Engineering Education
2.3. Transnational Teaming
2.4. Multidisciplinary Teaming
2.5. Transnational Mentorship
3. IDC Robocon 2015: Space Cleaner
3.1. Context and Objective
3.2. General Guidelines
- The rules are intended to create opportunities to innovate and test new ideas which are fundamental to gaining confidence as an Engineer.
- The IDC Robocon referees and staff make final scoring judgement calls and interpretations of the rules.
- Every day, there is be a compulsory team leaders’ meeting, and at least one representative from each team has to be present. Any discussion and decision on the rules are made during this meeting.
- Robots must be constructed with materials provided in a kit and staff in a workshop, except extra purchases of about 20 US$.
- In a workshop at least one instructor should be present to monitor safety and consult with the students about design and construction of machines.
3.3. Game Field
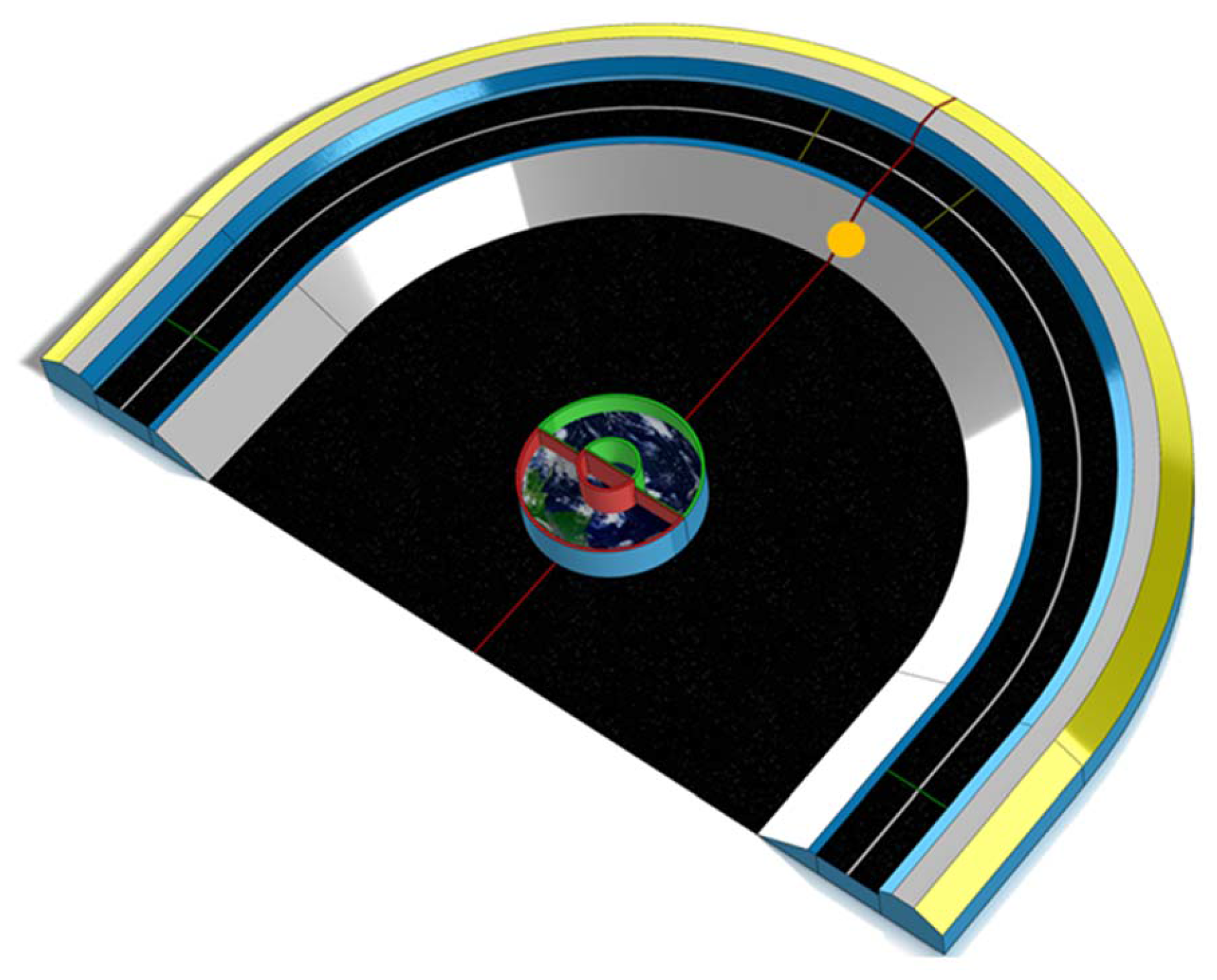
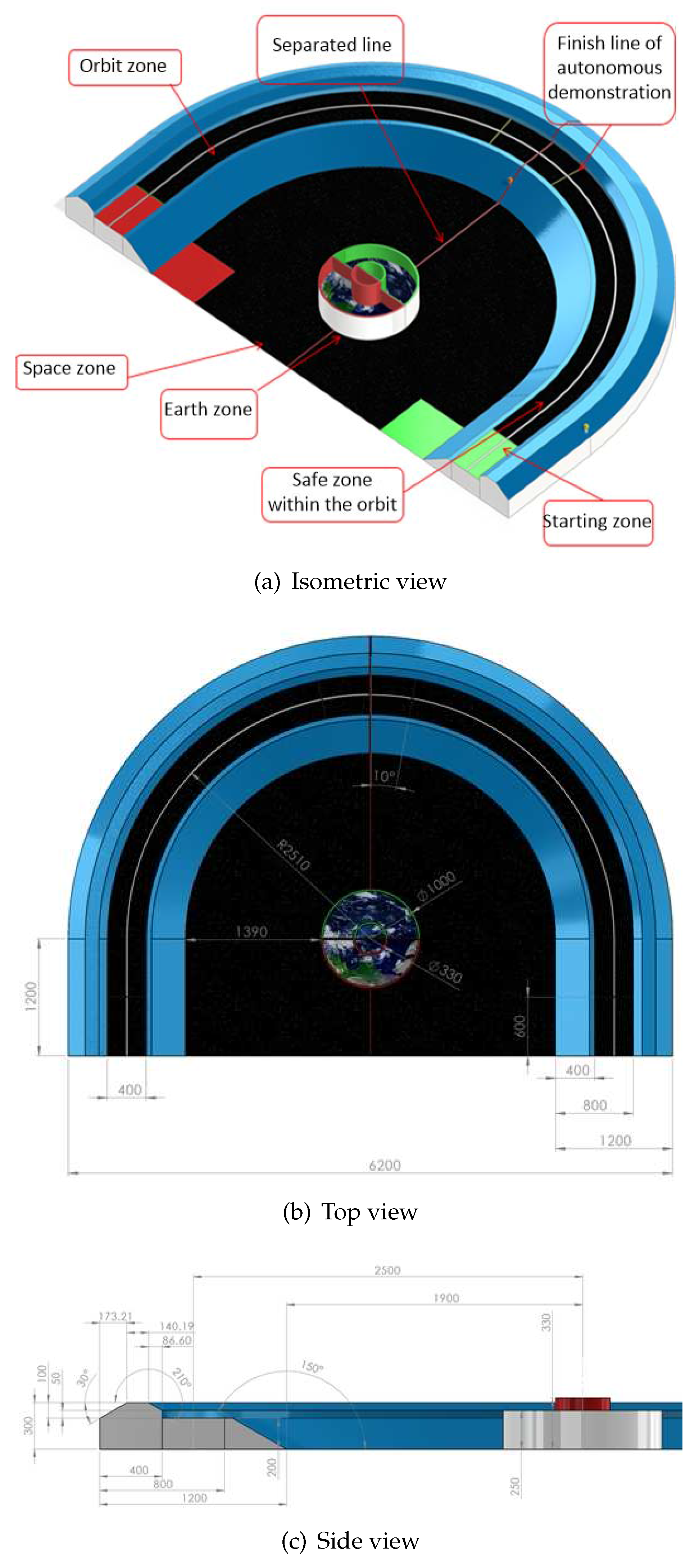
- The game field is consists of three zones: The outer orbit where the debris are present, the space across which the debris have to be transported and the earth which is the final destination for the debris. The detailed dimensions and views are given in Figure 1a–c.
- Earth on the game field rotates to simulate the orbiting space debris.
- Earth consists of dedicated regions for each team to deposit the debris collected by the robots for scoring points which is further divided into two areas—an outer shell area and a more elevated but smaller inner shell area.
- Deployment of robots is restricted to a dedicated safe zone within the orbit and the entire space zone.
- The entire arena is split into two parts, with one for each team and the crossover of robots are strictly not allowed. Any robot that enters the opponent’s arena would be taken out of the field for the rest of the game.
- The starting point of the robot located in space zone is a 600 mm × 600 mm square beside the orbit zone and the outer side boundary of the space zone. The starting point of the robot located in the orbit zone is a 400 mm × 600 mm rectangle beside the terminal edge of the orbit zone.
3.4. Objects
- There are three types of debris objects within the game field, colored in white, yellow and orange, with varying points allocated to each. The debris are foam balls with a diameter of 50 mm.
- There is a total of 81 pieces of debris—40 of them are scattered in each of the two regions dedicated for the teams and one orange piece of debris located at the boundary line between the regions. Out of the 40 pieces of debris located within each region, 12 of them are yellow, and 28 of them are white. The locations of the pieces of debris are illustrated in Figure 2. The yellow-colored area is where yellow debris is located, and the white area is where the white debris is located. The orange point is where the orange debris is located.
- Debris that fall off from the game field are out of play.
- The debris are located on the top of a diameter 30 mm tube that is inserted the foam.
3.5. Robot
- Each team is allowed a maximum of two robots.
- The entire robot must be made from the kit materials and materials purchased using the funds (SGD 50) allocated for each team. All components purchased out of the kit must be authorized by one of the official referees. Screws, bolts, nuts, washers, stick glues, vinyl tape, welds and many other materials are prepared for the teams at the workplace. The list of components in the kit is given in Table 1.
- The maximum allowable robot size is 600 mm × 600 mm × 600 mm. Robots can be designed with active deployable mechanisms with no size restrictions.
- The total weight of each robot must not exceed 5 kg.
- The machines in the fabrication lab, for example bench drilling machines, band saws, benders, 3D printers, laser cutters and hand tools, can be used. The technical facilitators in the fabrication lab and IDC Robocon staff can be asked on how to access them.
- Each robot must be defined either to operate in orbit or space zones and they are expected to stay in their respective zone for the duration of the match. The robot in orbit must stay in orbit zone and the robot that is deployed in the space must stay within that area at all times.
- Teams can decide to put one robot in orbit and space zone or both robots in one of the two zones.
- For robots that fall off the defined area, team members are allowed to place them back onto the field to restart from the starting area. However, a penalty is levied.
3.6. Scoring
- To score, the team must transfer the debris from the orbit zone back to their respective regions on earth. The debris are color-coded and the point value of each colored debris is listed below in Table 2.
- When the team deposits the debris into the outer shell area of the Earth, they get the points listed in Table 2. For each piece of debris transferred into the smaller elevated inner shell of the Earth, it is worth three times the points allocated for that colored debris, except for the orange debris which doubles the total points when deposited anywhere into the team’s earth region.
- Whenever a robot goes out of the respective play area defined and/or crashes on either sides of the outer orbit, or any part of the earth zone, a penalty of 120 points would be levied, and the robot has to restart from the starting area.
- Teams that demonstrate an autonomous line following from starting area to the demarcated boundary line are awarded an additional 120 points. This demonstration has to be done within the allocated game play time for the team.
3.7. Schedules and Timing
- The contest consists of qualifying rounds and a final competition.
- The qualifying rounds take place on 31st of July morning 9 am–12 pm.
- The finals is on the 31st of July evening 4 pm–6 pm.
- The qualifying round is 150 s, and final tournament is 180 s.
- If a game finishes in a tie, the following tie-breaking rule will be applied; a game of 30 s to collect a single orange debris placed on the boundary line. The team that collects and deposits the orange debris will win the tie. This tie-breaking rule will apply until a winner emerges.
3.8. Control
- Damaging, overturning, pushing and lifting an opponent’s robot are not allowed.
- Damaging the game field and/or control equipment is strictly prohibited.
- During the workshop time and competition time, participants are supposed to respect and protect the game field. Stepping, moving, jumping over the game field is strictly prohibited.
- Contestants and/or spectators may not directly affect the motion of the robot.
- After the time limit, the referee judges the winner of the match according to the points scored by the competing teams.
- No dangerous machines are allowed. Technical facilitators and IDC Robocon staff’s decisions on safety must be respected and obeyed at all times.
- Team members controlling the robot must wear safety glasses near the game field. Certain prescription glasses are acceptable.
4. Results and Discussions
5. Lessons Learned
5.1. Problems in Students
5.2. Problems in Rules
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wisspeintner, T.; van der Zant, T.; Locchi, L.; Schiffer, S. RoboCup@Home: Scientific Competition and Benchmarking for Domestic Service Robots. Interact. Stud. 2009, 10, 392–426. [Google Scholar]
- Kitano, H.; Asada, M. The RoboCup humanoid challenge as the millennium challenge for advanced robotics. Adv. Robot. 1998, 13, 723–736. [Google Scholar] [CrossRef]
- Tadokoro, S. RoboCupRescue international research project. Adv. Robot. 2002, 16, 569–572. [Google Scholar] [CrossRef]
- Eguchi, A. RoboCupJunior for promoting STEM education, 21st century skills, and technological advancement through robotics competition. Robot. Auton. Syst. 2016, 75, 692–699. [Google Scholar] [CrossRef]
- Dwiputra, R.; Bonn-Rhein-Sieg, H.; Berghofer, J.; Ahmad, A.; Awaad, I.; Amigoni, F.; Bischoff, R.; Bonarini, A.; Fontana, G.; Hegger, F.; et al. The RoCKIn@Work Challenge. In Proceedings of the 41st International Symposium on Robotics, Munich, Germany, 7–9 June 2010.
- Schneider, S.; Hegger, F.; Ahmad, A.; Awaad, I.; Amigoni, F.; Berghofer, J.; Bischoff, R.; Bonarini, A.; Dwiputra, R.; Fontana, G.; et al. The RoCKIn@Home Challenge. In Proceedings of the 41st International Symposium on Robotics, Munich, Germany, 7–9 June 2010.
- Simmons, R.; Goldberg, D.; Goode, A.; Montemerlo, M.; Roy, N.; Sellner, B.; Urmson, C.; Schultz, A.; Abramson, M.; Adams, W.; et al. GRACE: An Autonomous Robot for the AAAI Robot Challenge. AI Mag. 2003, 24, 51–72. [Google Scholar]
- Baker, C.R.; Dolan, J.M. Street Smarts for Boss. IEEE Robot. Autom. Mag. 2009, 16, 78–87. [Google Scholar] [CrossRef]
- Iagnemma, K.; Buehler, M. Special issue on the DARPA grand challenge, Part 1. J. Field Robot. 2006, 23, 461–462. [Google Scholar] [CrossRef]
- Eurobot. International Autonomous Robot Contest; Eurobot Association: Ris-Orangis, France, 2016. [Google Scholar]
- Smart, B. The ICRA Robot Challenge. IEEE Robot. Autom. Mag. 2010, 17, 8–10. [Google Scholar] [CrossRef]
- Giannakopoulos, N. Chapter Experiences from WRO 2009 Competition and Verifications about the Robotics Incorporation in the School. In Book of Abstracts of the Conference: Lessons Learnt from the Terecop Project and New Pathways into Educational Robotics across Europe; TERECoP: Athens, Greece, 2009. [Google Scholar]
- Melchior, A.; Cohen, F.; Cutter, T.; Leavitt, T.; Manchester, N.H. More than Robots: An Evaluation of the First Robotics Competition Participant and Institutional Impacts; Technical Report; Heller School for Social Policy and Management, Brandeis University: Waltham, MS, USA, 2005. [Google Scholar]
- Amigoni, F.; Bonarini, A.; Fontana, G.; Matteucci, M.; Schiaffonati, V. Benchmarking through competitions. In European Robotics Forum—Workshop on Robot Competitions: Benchmarking, Technology Transfer, and Education; European Robotics Forum: Lyon, France, 2013. [Google Scholar]
- Cappelleri, D.J.; Vitoroulis, N. The Robotic Decathlon: Project-Based Learning Labs and Curriculum Design for an Introductory Robotics Course. IEEE Trans. Educ. 2013, 56, 73–81. [Google Scholar] [CrossRef]
- Jung, S. Experiences in Developing an Experimental Robotics Course Program for Undergraduate Education. IEEE Trans. Educ. 2013, 56, 129–136. [Google Scholar] [CrossRef]
- Telenko, C.; Wood, K.; Otto, K.; Elara, M.R.; Foong, S.; Pey, K.L.; Tan, U.X.; Camburn, B.; Moreno, D.; Frey, D. Designettes: An Approach to Multidisciplinary Engineering Design Education. J. Mech. Des. 2016, 138. [Google Scholar] [CrossRef]
- Battisti, F.; Boato, G.; Carli, M.; Neri, A. Teaching Multimedia Data Protection Through an International Online Competition. IEEE Trans. Educ. 2011, 54, 381–386. [Google Scholar] [CrossRef]
- Pack, D.J.; Avanzato, R.; Ahlgren, D.J.; Verner, I.M. Fire-fighting mobile robotics and interdisciplinary design-comparative perspectives. IEEE Trans. Educ. 2004, 47, 369–376. [Google Scholar] [CrossRef]
- Firebaugh, S.L.; Piepmeier, J.A. The RoboCup Nanogram League: An Opportunity for Problem-Based Undergraduate Education in Microsystems. IEEE Trans. Educ. 2008, 51, 394–399. [Google Scholar] [CrossRef]
- Chen, N. A Vision-Guided Autonomous Vehicle: An Alternative Micromouse Competition. IEEE Trans. Educ. 1997, 40, 253–258. [Google Scholar] [CrossRef]
- Yilmaz, M.; Ozcelik, S.; Yilmazer, N.; Nekovei, R. Design-Oriented Enhanced Robotics Curriculum. IEEE Trans. Educ. 2013, 56, 137–144. [Google Scholar] [CrossRef]
- Mohan, R.E.; Rojas, N.; Sosa, R.; Kaisner, J. Robot Inclusive Space challenge: A design initiative. In Proceedings of the 6th IEEE Conference on Robotics, Automation and Mechatronics (RAM), Manila, Philippines, 12–15 November 2013; pp. 73–78.
- Mohan, R.E.; Tan, N.; Tjoelsen, K.; Sosa, R. Designing the robot inclusive space challenge. Dig. Commun. Netw. 2015, 1, 267–274. [Google Scholar] [CrossRef]
- IDC Robocon Official Website. Available online: http://www.idc-robocon.org/e/index (accessed on 1 June 2016).
- Yamakita, M. Engineering Design Education via IDC Robot Contest. In Proceedings of the IFAC Symposium on Advances in Control Education, Kumamoto City, Japan, 21–23 October 2009; Volume 8, pp. 227–232.
- Toh, C.A.; Miller, S.R.; Kremer, G.E.O. The Impact of Team-Based Product Dissection on Design Novelty. J. Mech. Des. 2014, 136. [Google Scholar] [CrossRef]
- Austin-Breneman, J.; Honda, T.; Yang, M.C. A Study of Student Design Team Behaviors in Complex System Design. J. Mech. Des. 2012, 134. [Google Scholar] [CrossRef]
- Grover, R.; Krishnan, S.; Shoup, T.; Khanbaghi, M. A competition-based approach for undergraduate mechatronics education using the arduino platform. In Proceedings of the Interdisciplinary Engineering Design Education Conference (IEDEC), Santa Clara, CA, USA, 3 March 2014; pp. 78–83.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S/N | Description | Oty (per Team) |
|---|---|---|
| Electronics | ||
| 1 | DFR0305 Romeo BLE | 1 |
| 2 | DFR COMB0003 DFRduino Mega Kit for 4 motor robot | 1 |
| 3 | Turnigy 9X 9Ch Transmitterw/Module & 8Ch Receiver | 1 |
| 4 | LiPo Battery | 2 |
| 5 | Micro USB cable | 1 |
| 6 | Printer port USB cable | 1 |
| Actuators | ||
| 1 | SRC SM-S4303R Continuous RotationServo | 2 |
| 2 | HXT 900 Micro Servo | 3 |
| 3 | Turnigy metal gear micro servo TSS-10MG | 2 |
| 4 | Turnigy TGY-R5180MG 180 Degree MetalMini Servo | 2 |
| 5 | VSD-11Y 360 Degree Large Servo | 1 |
| 6 | Geared DC Motor, 133 rpm, 75:1, 6 V | 1 |
| 7 | HXT 12K 10 kg Servo | 2 |
| 8 | 28BYJ-48-5V 4-Phase 5-Wire Stepper Motor Kit | 1 |
| 9 | SW5513-4MA Sailwinch Servo 10.63 kg/55 g/0.9 | 1 |
| Wheels | ||
| 1 | POL226-5/8 inch plastic black wheel for continuous servo | 2 |
| Accessories | ||
| 1 | 4WD Vehicle Kit (4 DC motors) | 1 |
| Color | Points |
|---|---|
| Orange | Doubling total score |
| Yellow | 30 |
| White | 10 |
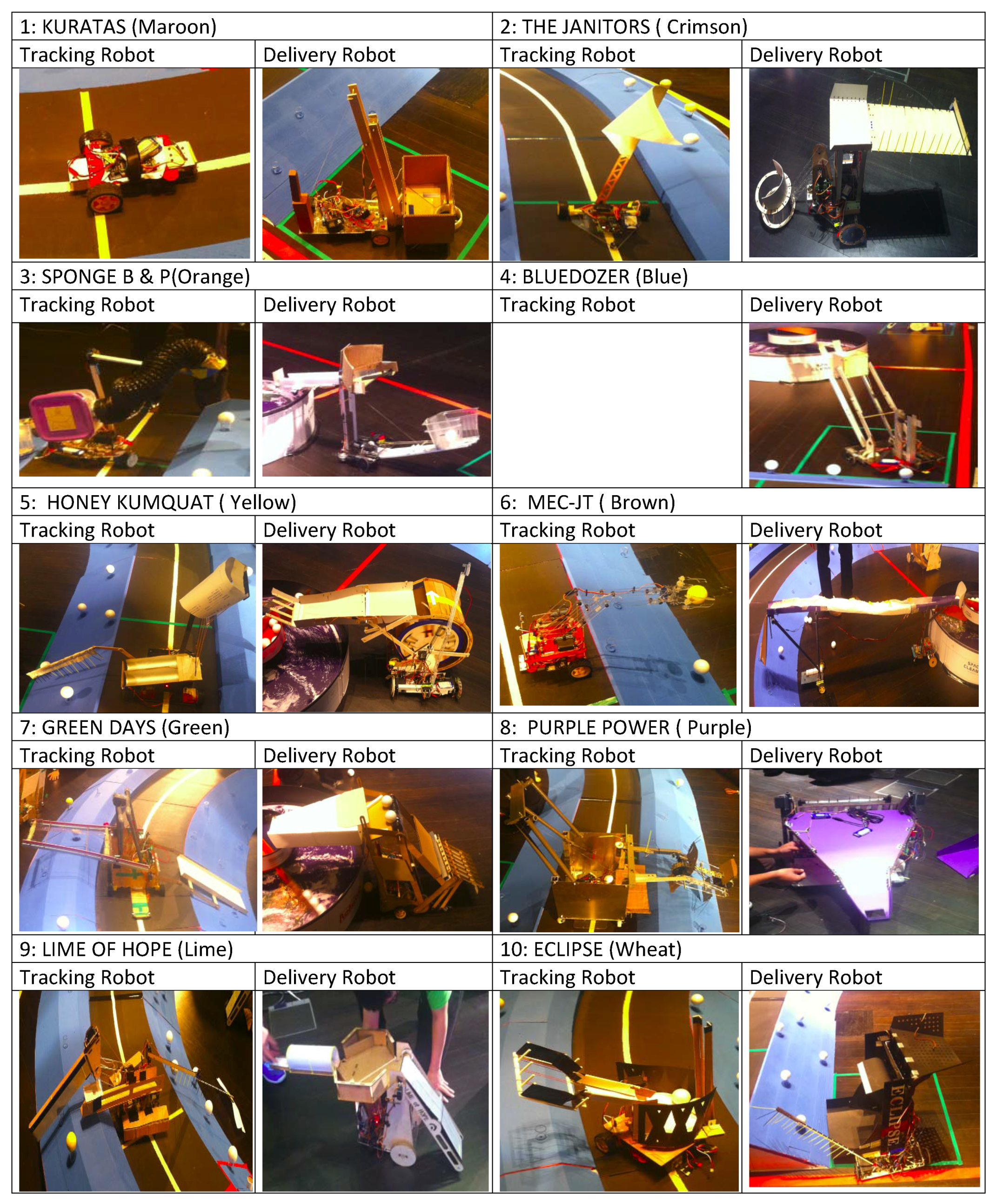
| No. | Teams | Tracking Robots | Delivery Robots |
|---|---|---|---|
| 1 | KURATA | NA | rubber band |
| 2 | THE JANITOR | sweeping | rubber band |
| 3 | SPONGE B & P | pneumatic sucking | passive |
| 4 | BLUEDOZER | NA | passive |
| 5 | HONEY KUMQUAT | sweeping, rubber band | rubber band, roller |
| 6 | MEC-JT | gripping | passive |
| 7 | GREEN DAYS | sticking | sweeping, sticking |
| 8 | PURPLE POWER | sweeping | sticking |
| 9 | LIME OF HOPE | sweeping, ticking | sticking |
| 10 | ECLIPSE | rubber band | sweeping |
| Time | Match | [LEFT] ORANGE | Score | Score | [RIGHT] BLUE |
|---|---|---|---|---|---|
| Qualifying Round Robin | |||||
| 10:30 | 1 | KURATAS | 20 | –1 | BLUEDOZER |
| 10:40 | 2 | GREEN DAYS | 0 | 180 | MEC-JT |
| 10:50 | 3 | SPONGE B & P | 0 | 400 | LIME OF HOPE |
| 11:00 | 4 | PURPLE POWER | 0 | 0 | ECLIPSE |
| 11:10 | 5 | BLUEDOZER | –1 | 30 | THE JANITORS |
| 11:20 | 6 | MEC-JT | 150 | 0 | HONEY KUMQUAT |
| 11:30 | 7 | KURATAS | 60 | 120 | SPONGE B & P |
| 11:40 | 8 | GREEN DAYS | 20 | 0 | PURPLE POWER |
| 11:50 | 9 | LIME OF HOPE | 120 | 80 | THE JANITORS |
| 12:00 | 10 | ECLIPSE | 0 | 420 | HONEY KUMQUAT |
| 13:00 | 11 | SPONGE B & P | 0 | –1 | BLUEDOZER |
| 13:10 | 12 | PURPLE POWER | 0 | 270 | MEC-JT |
| 13:20 | 13 | THE JANITORS | 460 | 0 | KURATAS |
| 13:30 | 14 | HONEY KUMQUAT | 210 | 0 | GREEN DAYS |
| 13:40 | 15 | BLUEDOZER | 0 | 280 | LIME OF HOPE |
| 13:50 | 16 | MEC-JT | 240 | 120 | ECLIPSE |
| 14:00 | 17 | THE JANITORS | 0 | 0 | SPONGE B & P |
| 14:10 | 18 | HONEY KUMQUAT | 180 | 60 | PURPLE POWER |
| 14:20 | 19 | LIME OF HOPE | 210 | 240 | KURATAS |
| 14:30 | 20 | ECLIPSE | 120 | 150 | GREEN DAYS |
| Championship Bracket | |||||
| Quarter Finals | |||||
| 16:10 | QF1 | SPONGE B & P | 120 | 180 | HONEY KUMQUAT |
| 16:20 | QF2 | THE JANITORS | 0 | 180 | GREEN DAYS |
| 16:30 | QF3 | LIME OF HOPE | 0 | 400 | PURPLE POWER |
| 16:40 | QF4 | KURATAS | 0 | 450 | MEC-JT |
| Semi Finals | |||||
| 16:50 | SF1 | LIME OF HOPE | 160 | 490 | HONEY KUMQUAT |
| 17:00 | SF2 | THE JANITORS | 200 | 510 | MEC-JT |
| Third Place & Finals | |||||
| 17:10 | TP | THE JANITORS | 280 | 360 | LIME OF HOPE |
| 17:20 | GF | HONEY KUMQUAT | 720 | 360 | MEC-JT |
| Final Results | |||||
| DESIGN PRIZE | THE JANITORS | ||||
| THIRD PRIZE | LIME OF HOPE | ||||
| SECOND PRIZE | MEC-JT | ||||
| FIRST PRIZE | HONEY KUMQUAT | ||||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, N.; Mohan, R.E.; Foong, S.; Yamakita, M.; Iwase, M.; Hatakeyama, S.; Kamamichi, N.; Song, L.; Wang, Y.; Zhu, Q. IDC Robocon: A Transnational Teaming Competition for Project-Based Design Education in Undergraduate Robotics. Robotics 2016, 5, 12. https://doi.org/10.3390/robotics5030012
Tan N, Mohan RE, Foong S, Yamakita M, Iwase M, Hatakeyama S, Kamamichi N, Song L, Wang Y, Zhu Q. IDC Robocon: A Transnational Teaming Competition for Project-Based Design Education in Undergraduate Robotics. Robotics. 2016; 5(3):12. https://doi.org/10.3390/robotics5030012
Chicago/Turabian StyleTan, Ning, Rajesh Elara Mohan, Shaohui Foong, Masaki Yamakita, Masami Iwase, Shoshiro Hatakeyama, Norihiro Kamamichi, Libo Song, You Wang, and Qiuguo Zhu. 2016. "IDC Robocon: A Transnational Teaming Competition for Project-Based Design Education in Undergraduate Robotics" Robotics 5, no. 3: 12. https://doi.org/10.3390/robotics5030012
APA StyleTan, N., Mohan, R. E., Foong, S., Yamakita, M., Iwase, M., Hatakeyama, S., Kamamichi, N., Song, L., Wang, Y., & Zhu, Q. (2016). IDC Robocon: A Transnational Teaming Competition for Project-Based Design Education in Undergraduate Robotics. Robotics, 5(3), 12. https://doi.org/10.3390/robotics5030012