1. Introduction
There has been a surge in the use of Unmanned Aircraft System (UAS) in recent years due to their low-cost and versatility in applications such as product delivery, routine surveillance, resource management, disaster response, agriculture, etc. However, UAS development often does not face the same design and testing rigor that is typical of a manned aircraft. With an increase in UAS application the question of integrating them safely into the airspace shared with manned aircraft needs to be addressed. Due to the fact that many (although with a decreasing percentage) small UAS today are still fully or partially controlled by a ground pilot, a poorly designed UAS with inadequate performance characteristics or handling qualities could lead to safety concerns.
One of the serious effects of inadequate design consideration towards human–UAS interaction is the Pilot Induced Oscillation (PIO). Military Standard Flying Qualities of Piloted Aircraft (MIL-STD 1797A) [
1] defines PIO to be “sustained or uncontrollable oscillations resulting from efforts of the pilot to control the aircraft”. It usually occurs when the pilot is involved in a highly demanding task and a trigger which interrupts the task and make pilot go out of sync with respect to the aircraft. Typical trigger events are control mode shifting, change in dynamics, atmospheric effects etc. Despite many research efforts studying PIO for full-scale manned aircraft, there has only been limited study on the remote control of unmanned aircraft [
2,
3,
4], where the aircraft is generally smaller and the human pilot is not physically present inside the aircraft.
PIO can be categorized based on the underlying linear or non-linear causes. In existing literature, there are three commonly accepted categories of PIO as outlined in a 1997 summary report by the NRC Committee [
5] on Effects of Aircraft-Pilot Coupling on Flight Safety, which are as follows.
Category 1 PIO: Characterized by oscillations with an underlying linear cause such as excessive time delay, phase loss, etc., which makes it easy to understand and study. Several criteria for manned aircraft focusing on excessive phase loss and time delay have already been developed. Certain criteria are based on open-loop analysis such as the Bandwidth/Pitch rate overshoot criteria [
6,
7], while criteria such as Neal-Smith [
8] is a closed-loop analysis method with an assumed pilot model.
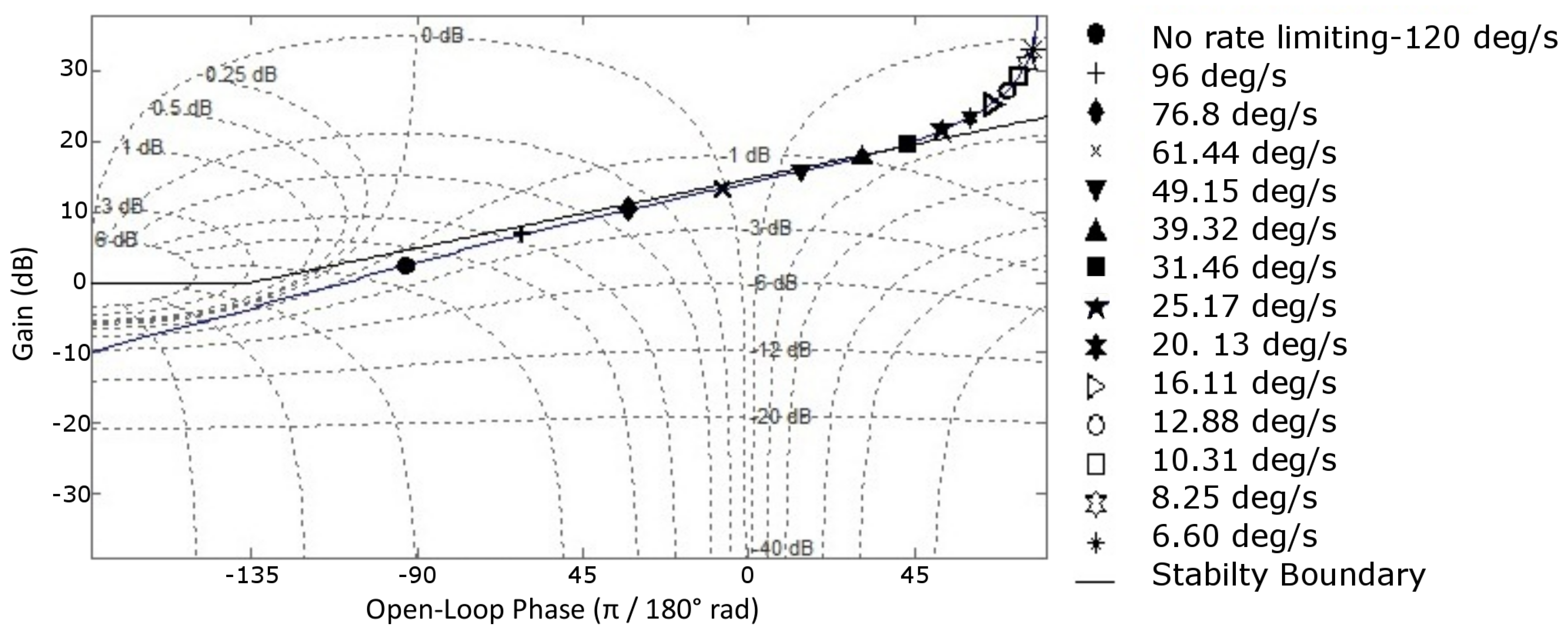
Category 2 PIO: Characterized by nonlinear events which can be modeled as Quasi-linear events such as actuator rate limiting or amplitude limiting, etc. This is the most common type of PIO observed. Most PIOs associated with non-linear events were found to be “cliff-like” [
5]; that is, the pilot reported the onset of the PIO as sudden and unexpected. Since control surface actuator rate limiting is a common non-linearity associated with modern flight control systems [
9,
10,
11], most of the studies are focused on studying its influence on aircraft handling quality and PIO. Currently, Open Loop Onset Point (OLOP) developed by Holger Duda at Deutsches Zentrum für Luft-und Raumfahrt e.V. (DLR) is the only commonly accepted criterion for Category 2 PIO resulting from rate limited actuator in the fully rate saturated case [
6,
7].
Category 3 PIO: This category of PIO is caused by highly nonlinear events which involve transition in the control element of the aircraft or the human pilot behavioral dynamics. The non-linearities associated are more complex and cannot be modeled as quasi-linear effects. The PIOs associated with this category are also “cliff-like” [
5]. Category 3 PIOs are difficult to recognize and are relatively rare, but could be highly dangerous when they do occur.
Due to a lack of PIO criteria for unmanned aircraft, in this paper, the existing PIO criteria developed for manned aircraft are first evaluated using UAS experiments. One advantage of studying PIO on UAS is that human life is not in danger due to PIO accidents; however, the lack of motion cues and pucker factor may render existing PIO criteria for manned aircraft ineffective on unmanned systems. Filling this knowledge gap was one of the main motivations for carrying out this research.
For simple flying conditions consisting of a single-input single-output task (e.g., maintaining a constant pitch attitude) a human pilot can be satisfactorily represented as a quasi-linear system with a linear component consisting of corresponding gain, lead, lag, time delay and a non-linear remnant [
12]. This quasi-linear model may not necessarily replicate the human pilot output or control decision making process exactly, but it is capable of giving basic information about the frequency properties and stability limits of the human controller for control tasks in systems such as aircraft or automobiles [
5,
13].
When flying an aircraft, a human pilot can change the control mode or use different control parameters to obtain satisfactory performance under different operating conditions [
13,
14,
15]. Therefore, there is a need to estimate the parameters of a quasi-linear control-theoretic pilot model. With these parameters, the assumed pilot control model structure, and the aircraft model, the closed-loop Pilot-Vehicle System (PVS) stability can be evaluated.
One way of estimating the parameters of a quasi-linear pilot model is through batch estimation using techniques such as maximum likelihood estimator and non-linear least squares estimator [
16,
17]. The batch estimation has the inherent assumption that the pilot model parameters are invariant for the data sets used for estimation. This can be reasonably true if the flight conditions are not changing quickly but it is not guaranteed. The parameters obtained from batch estimation may not provide us with variation in human pilot control but they provide the average values that can be useful for post-flight PVS stability studies for understanding the flight results.
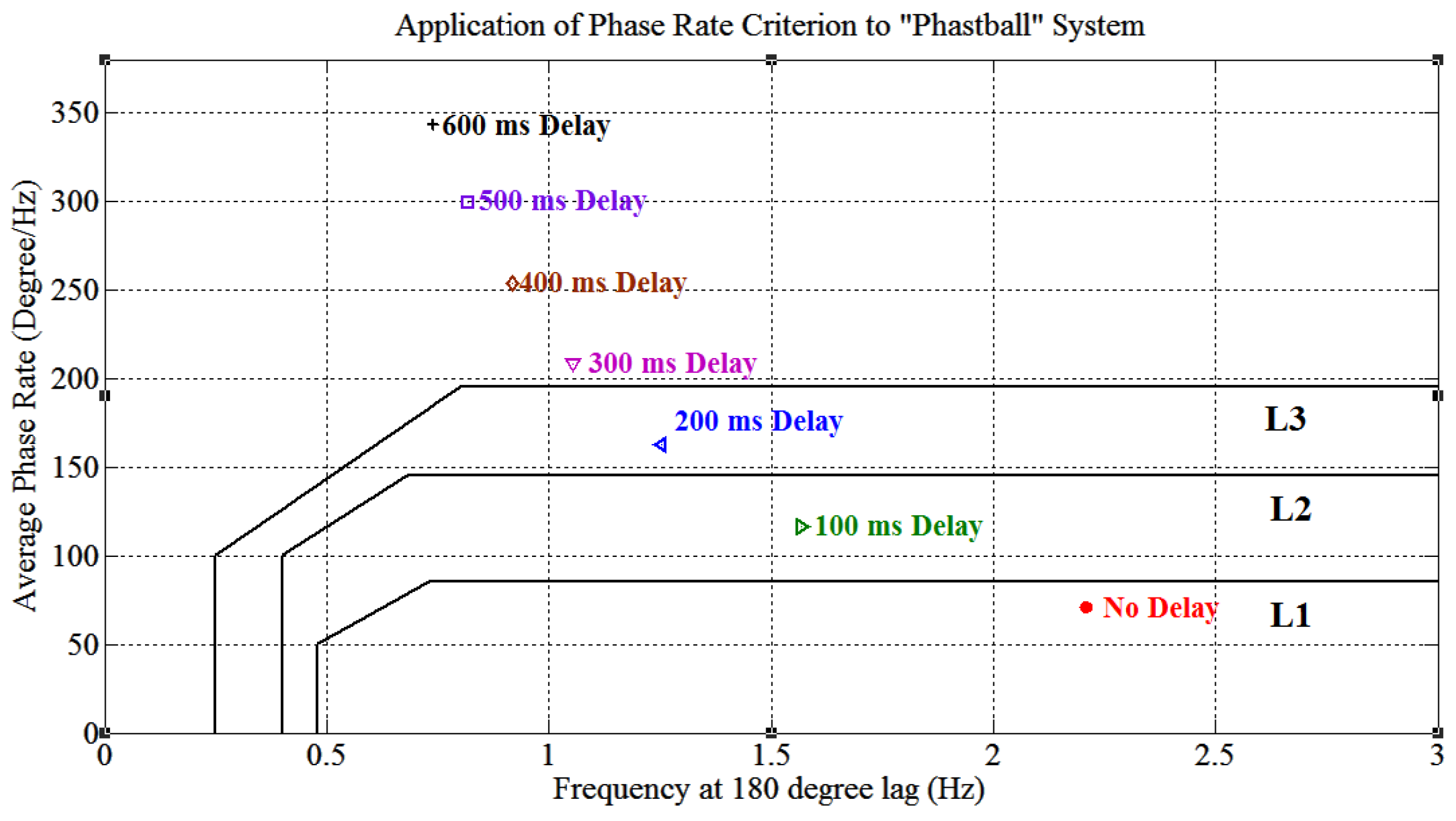
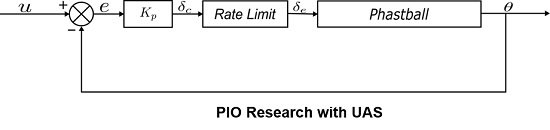
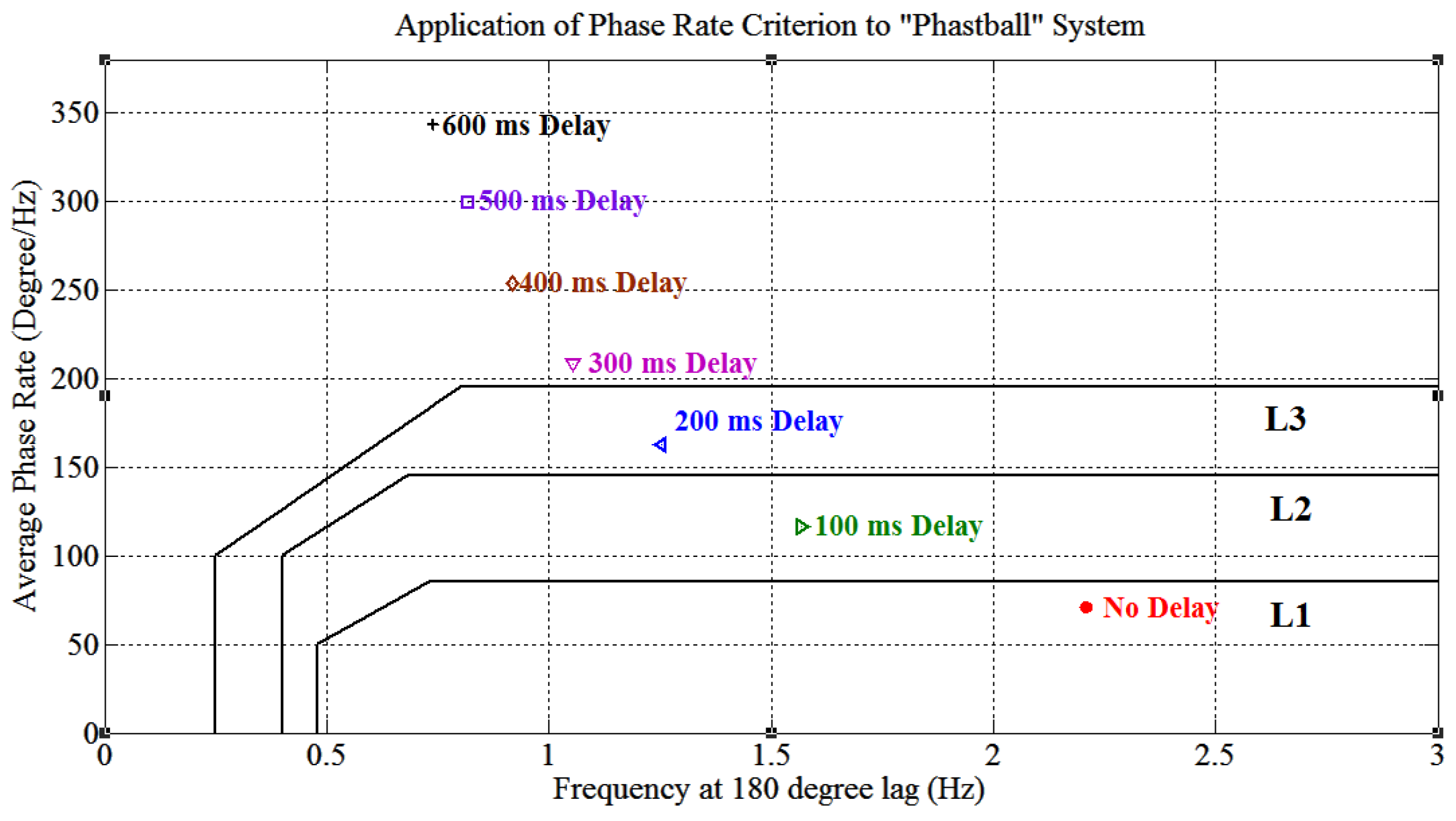
This paper builds on our previous PIO research carried out on an Remotely Controlled (R/C) research aircraft “Phastball” [
18] at West Virginia University (WVU) by adding the “Phase Rate and Gain Phase Template Criterion” for Category 1 PIO susceptibility prediction and closed-loop PVS stability studies using the pilot model obtained in Mandal, et al. [
19]. The research in this paper aims at laying the ground work for other researchers who plan to study PIO and human control behavior on R/C aircraft.
The rest of the paper is organized as follows.
Section 2 presents a summary of flight experiments carried out at WVU for PIO and Human Pilot model parameter estimation.
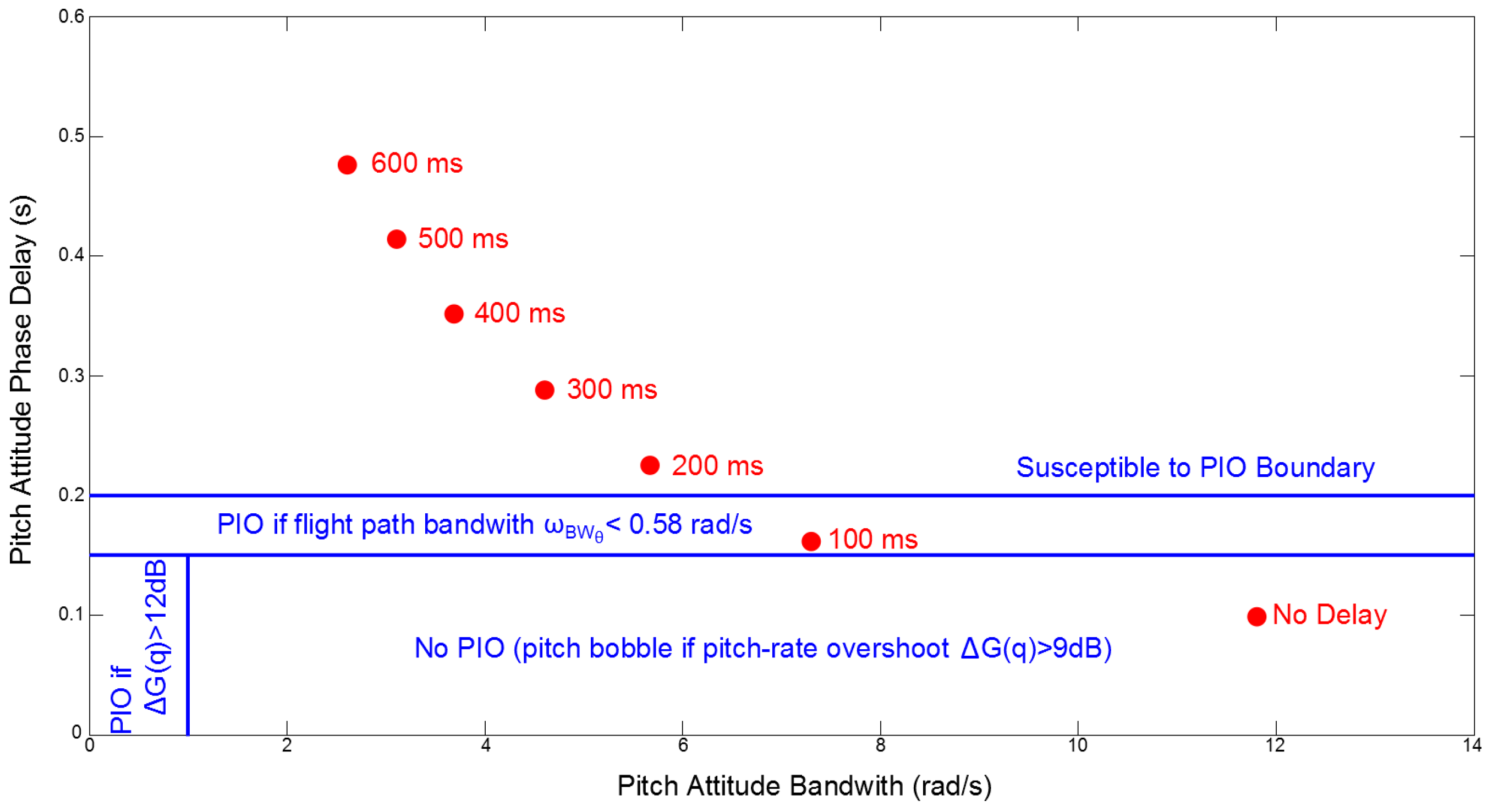
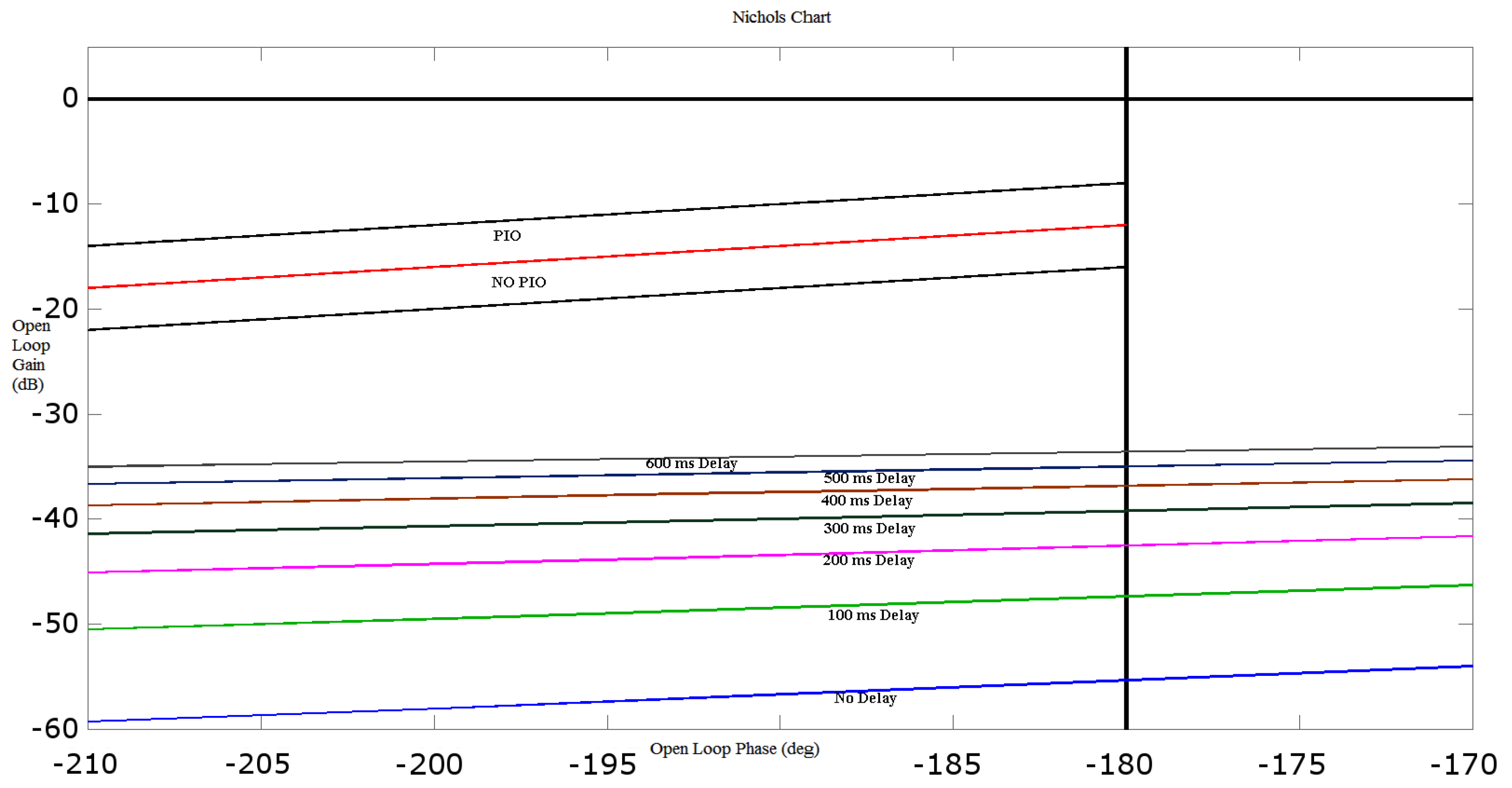
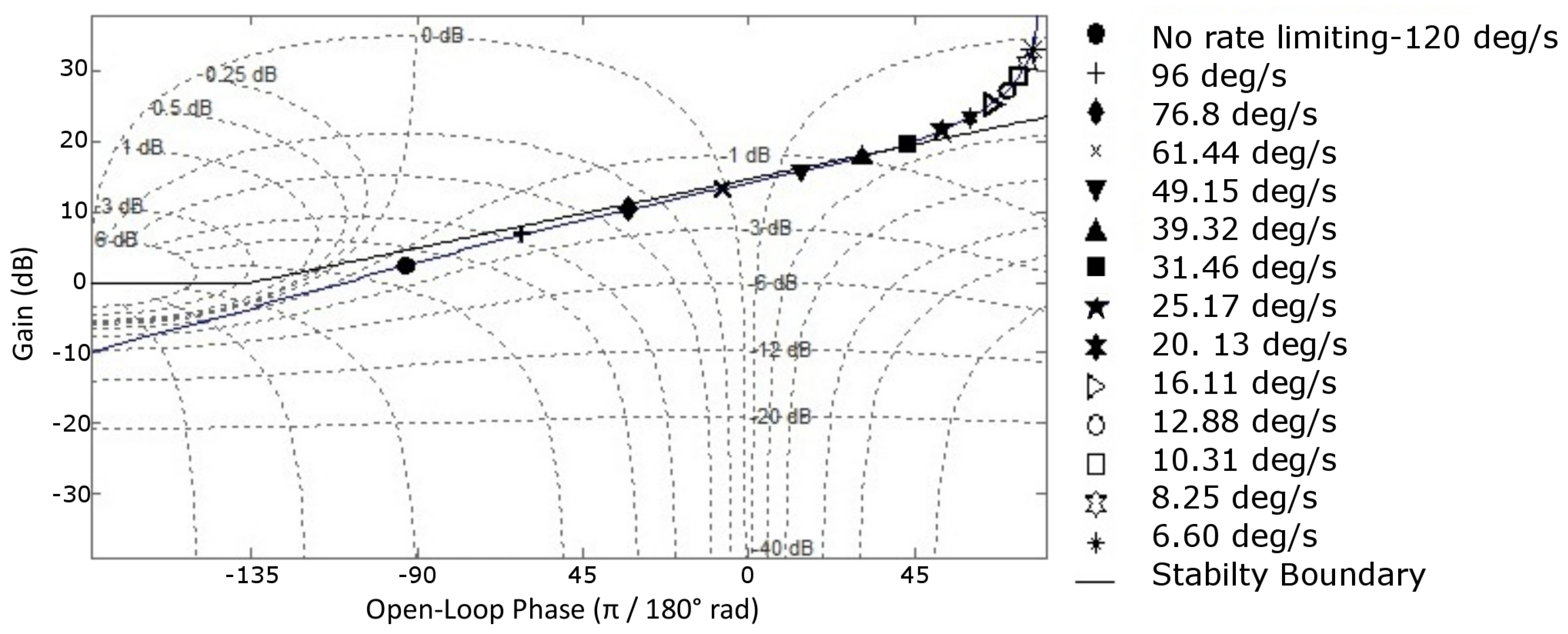
Section 3 presents a survey of Category 1 and 2 PIO analysis methods along with their ability in predicting the PIO susceptibility of “Phastball”.
Section 4 consists of analysis of pilot commands in the flight data and parameter estimation carried out for the McRuer pilot model.
Section 5 contains stability analysis for Category 1 and 2 PIO using both simulations and linear system control theory and is followed by conclusions in
Section 6.
2. Flight Experiments
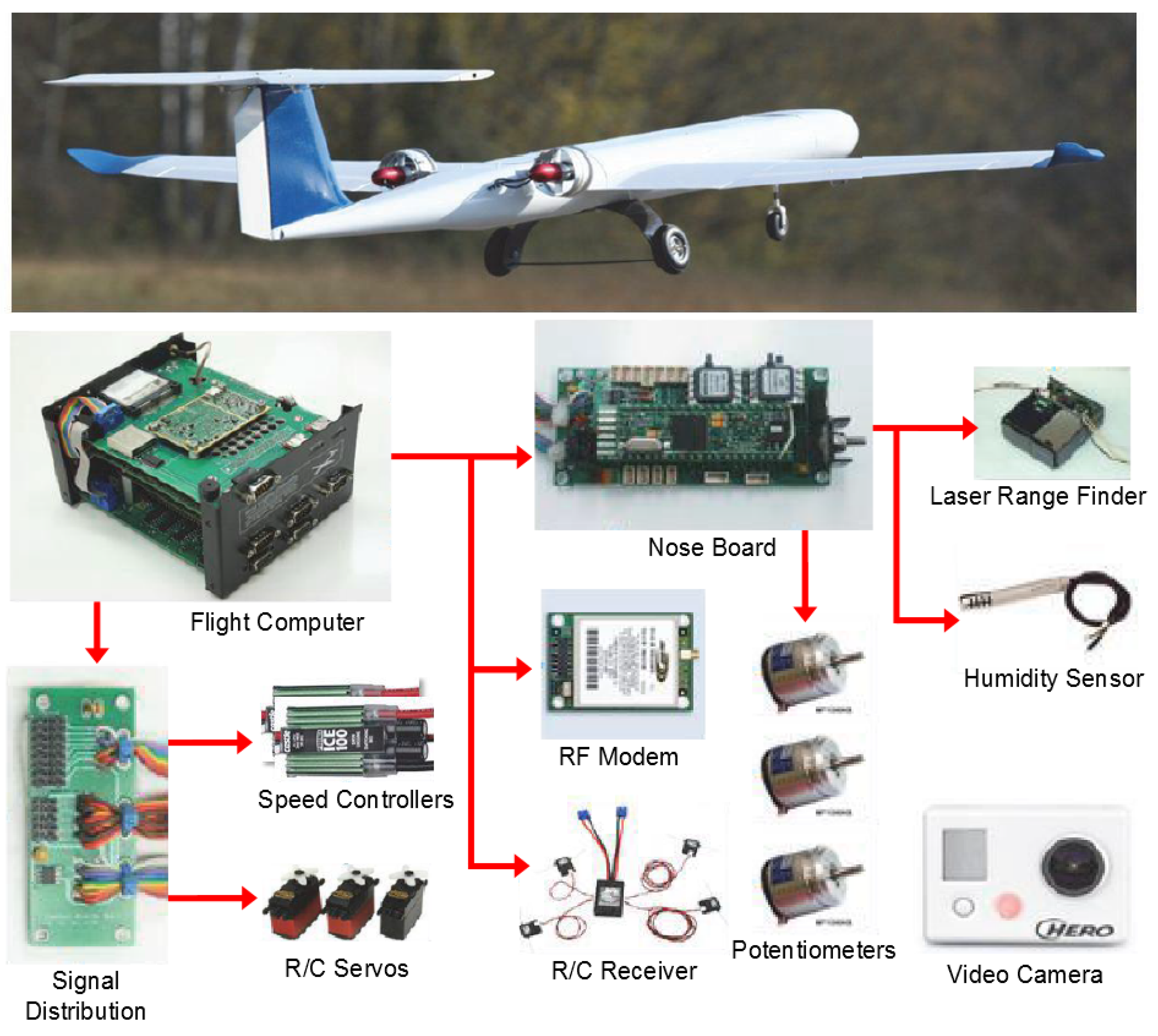
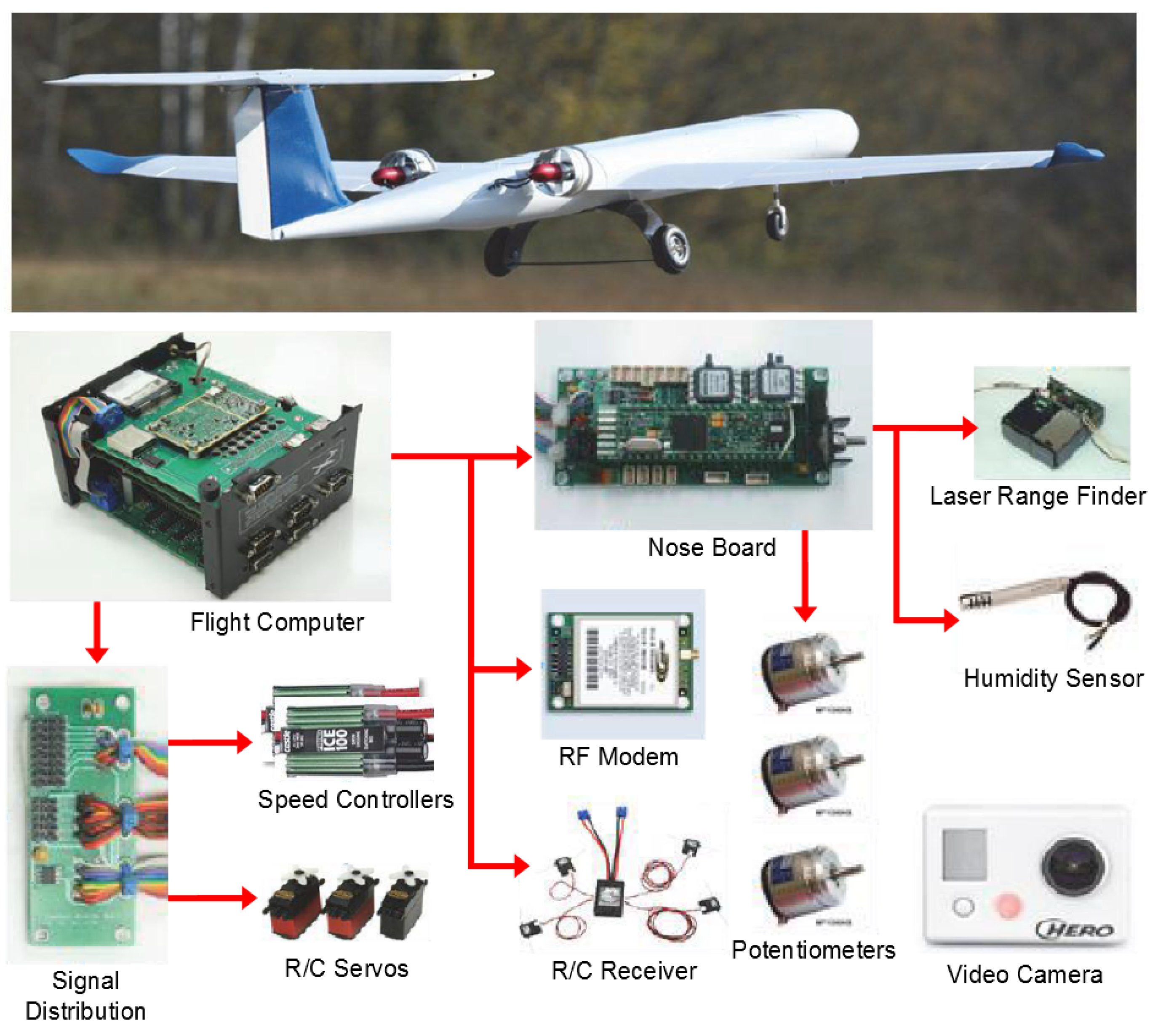
“Phastball” is equipped with a Gen-V avionics developed at WVU [
20,
21] shown in
Figure 1. It can perform functions including data acquisition, signal conditioning and distribution, global positioning system/inertial navigation system (GPS/INS) sensor fusion, Guidance Navigation and Control (GNC), failure emulation, and aircraft health monitoring. Processes such as attitude estimation, data logging, and actuator command generation takes place at 50 Hz in the Gen-V avionics [
22].
During “Phastball” flight the pilot can choose to operate in the Pilot-In-Loop (PIL) or Non-PIL modes. In PIL mode the pilot commands are read, processed, and modified by the avionics before being sent to actuators. Whereas in Non-PIL mode, the pilot commands are simply recorded by the avionics and sent directly to actuators. The extra data processing and modification in PIL mode adds additional time delay between the pilot command and the actuator movement. The measured system latency when PIL experiments were carried out was found to be 170 ms and in Non-PIL mode the measured system latency was found to be 70 ms. These latency values were measured pre-flight. It is assumed to be constant as long as the system in unchanged, more details can be found in Mandal et al. [
18]. Information about this delay is important as its value affects the stability analysis of the pilot vehicle system.
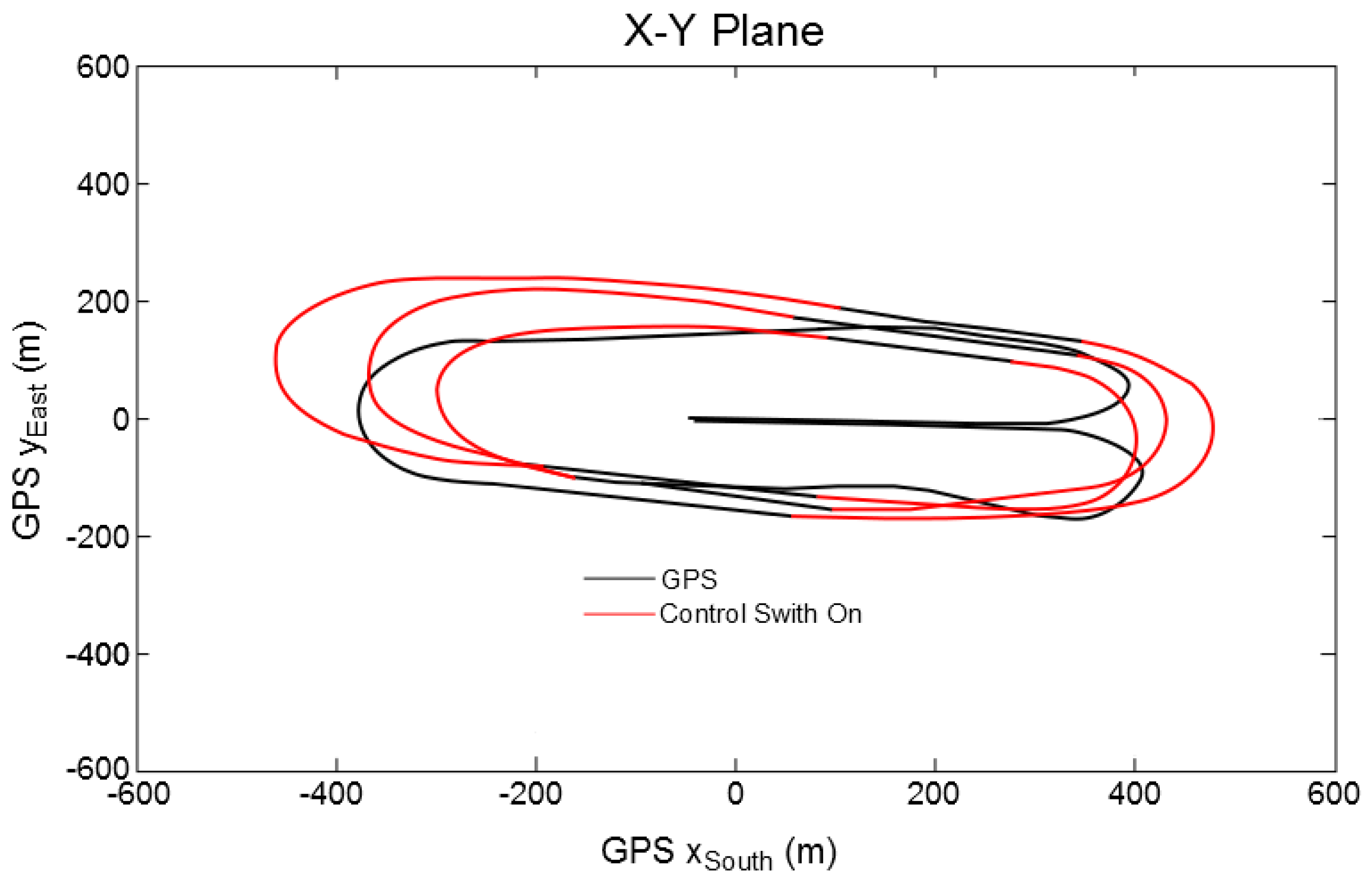
All experiments were carried out for the longitudinal axis of “Phastball”. Three pilots were recruited for this study who were highly experienced (>15 years of experience in R/C aircraft flying). The flight trajectory followed during flight tests is elliptical in shape [
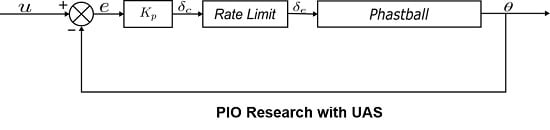
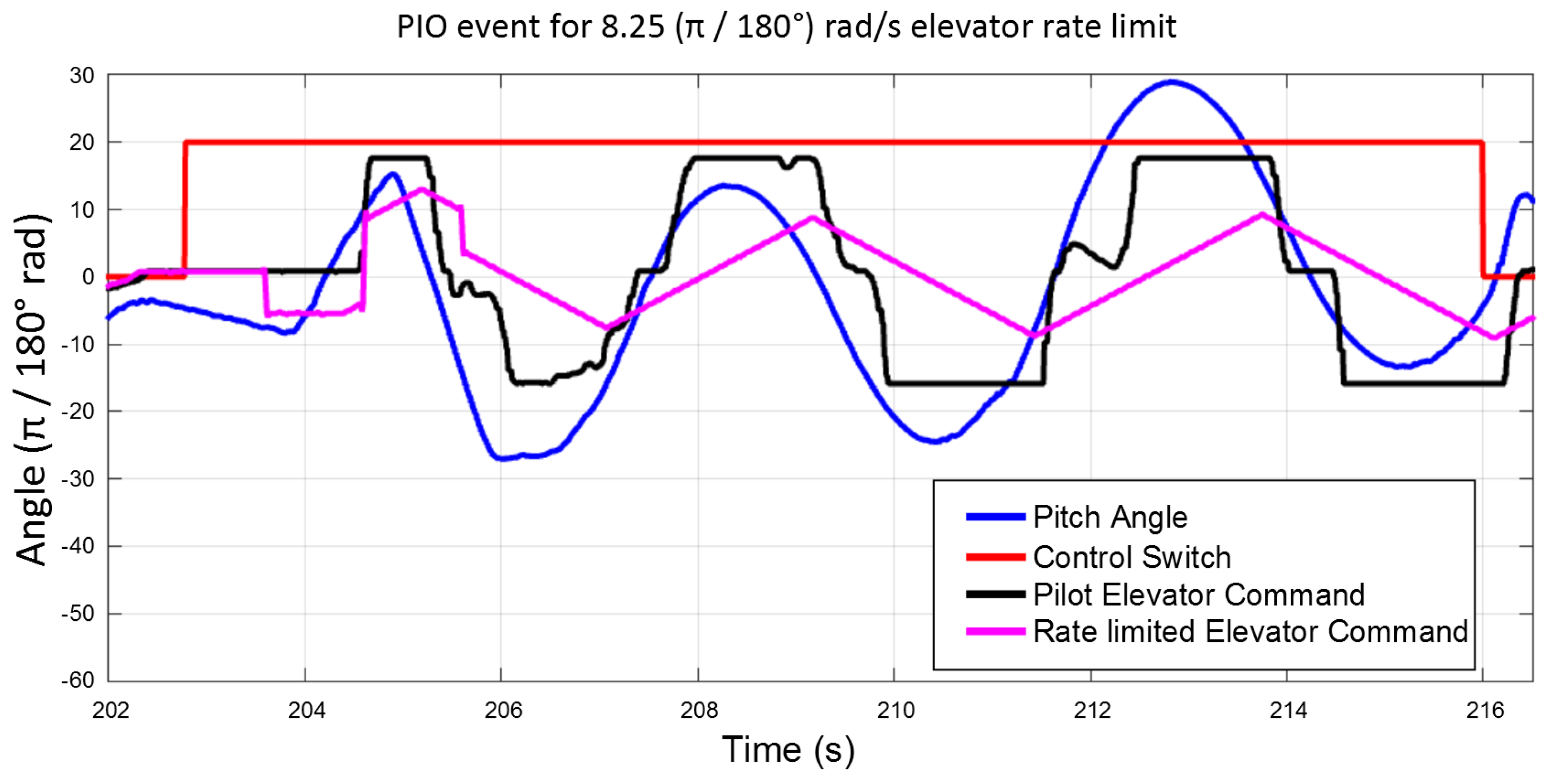
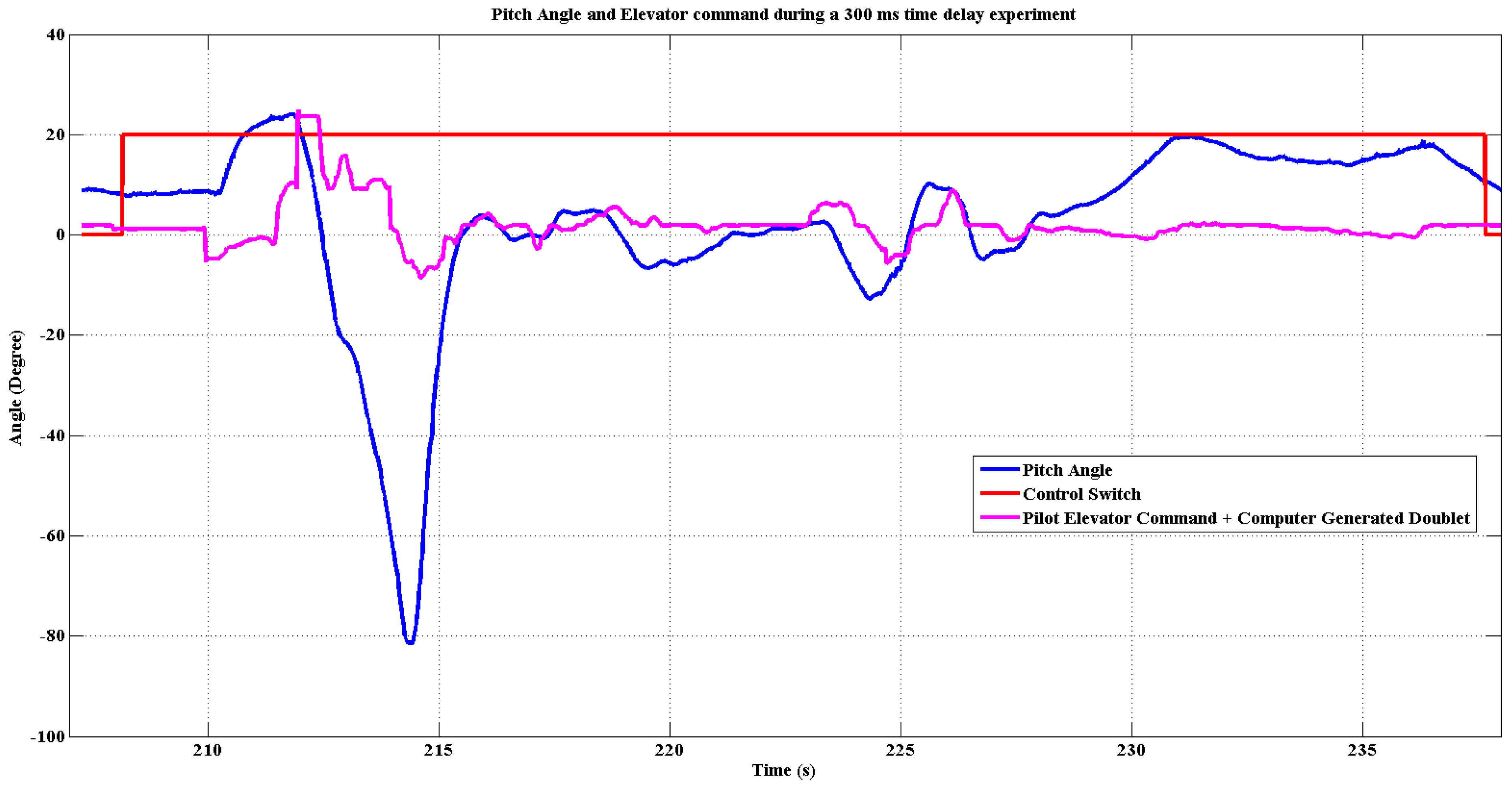
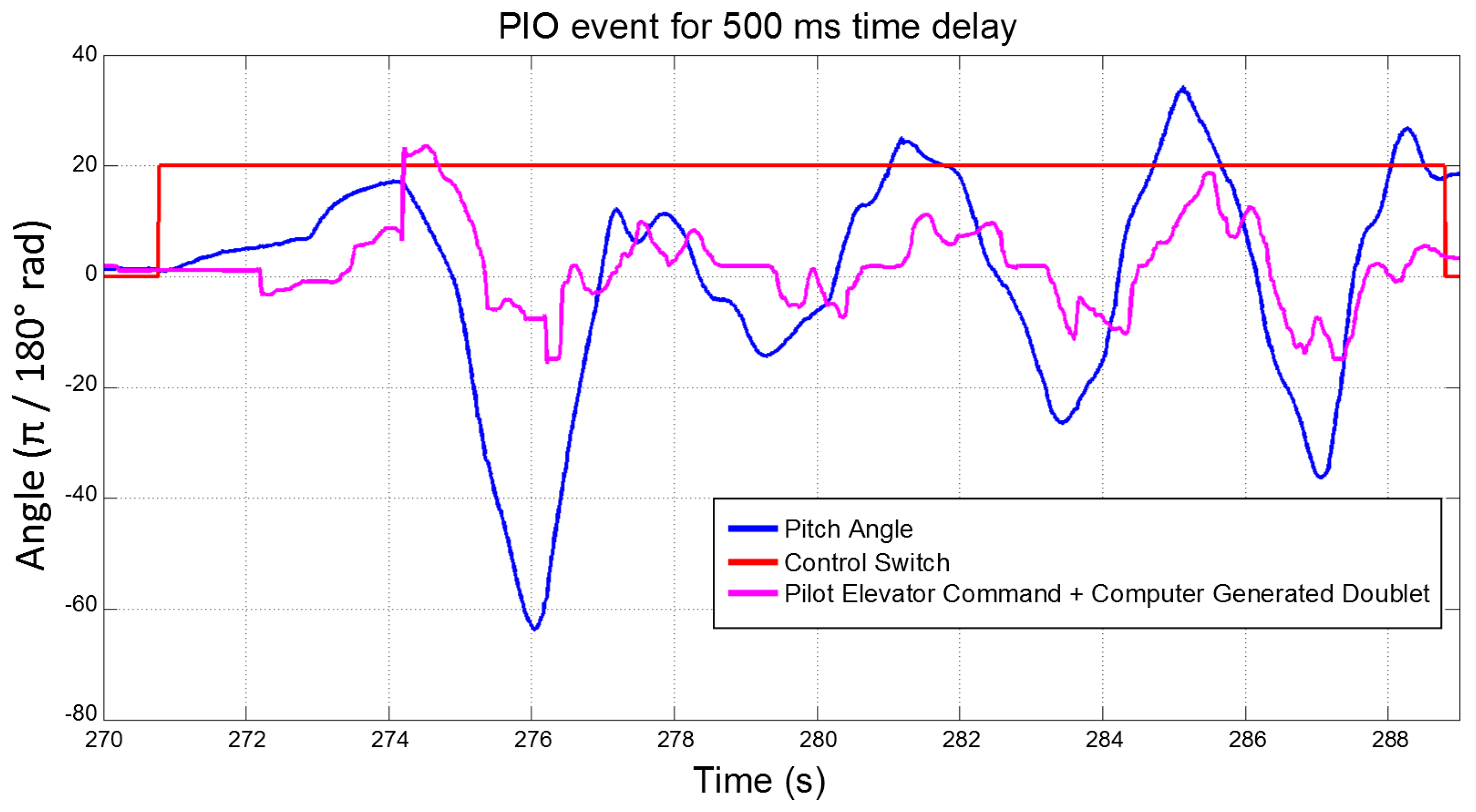
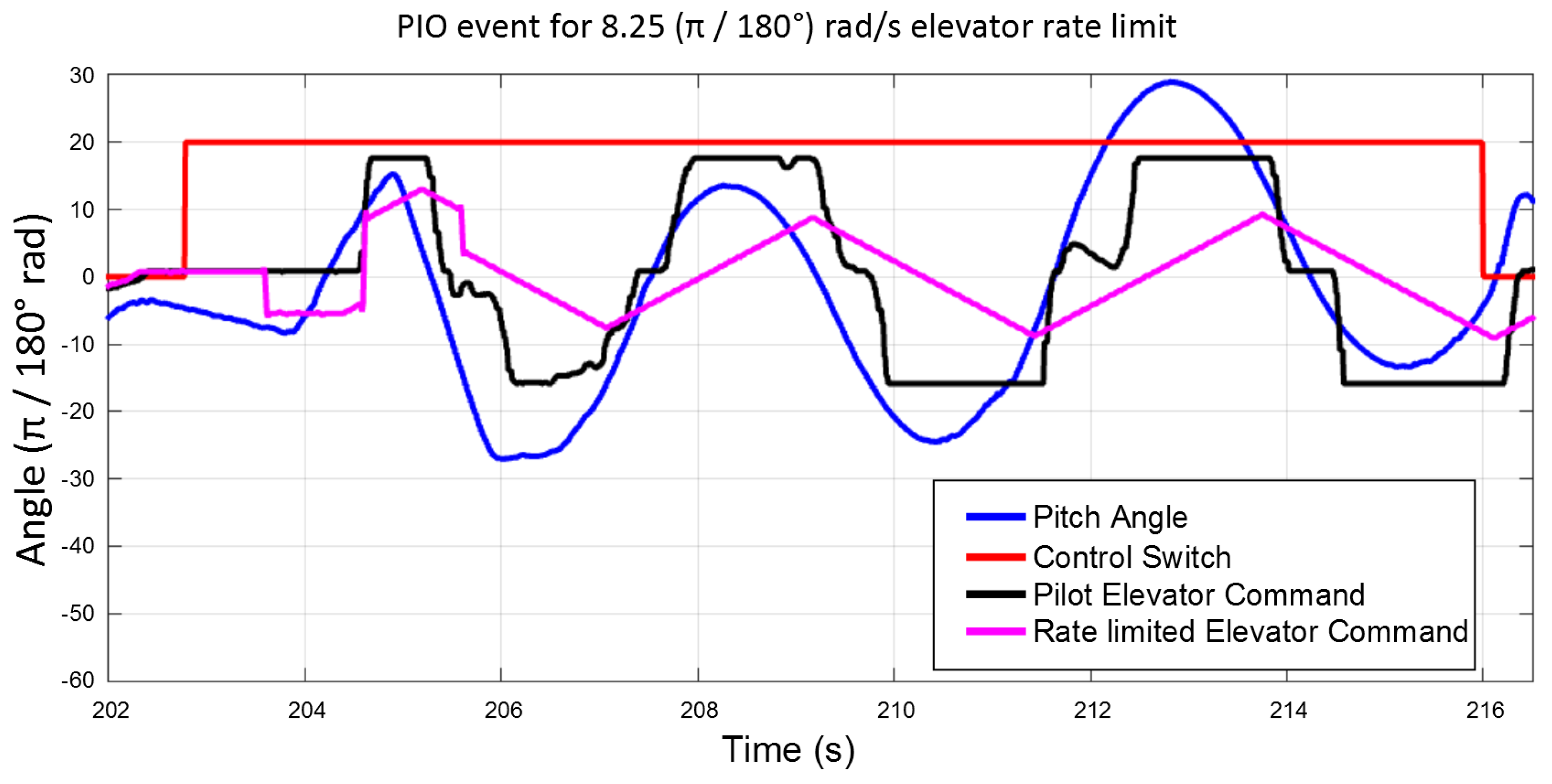
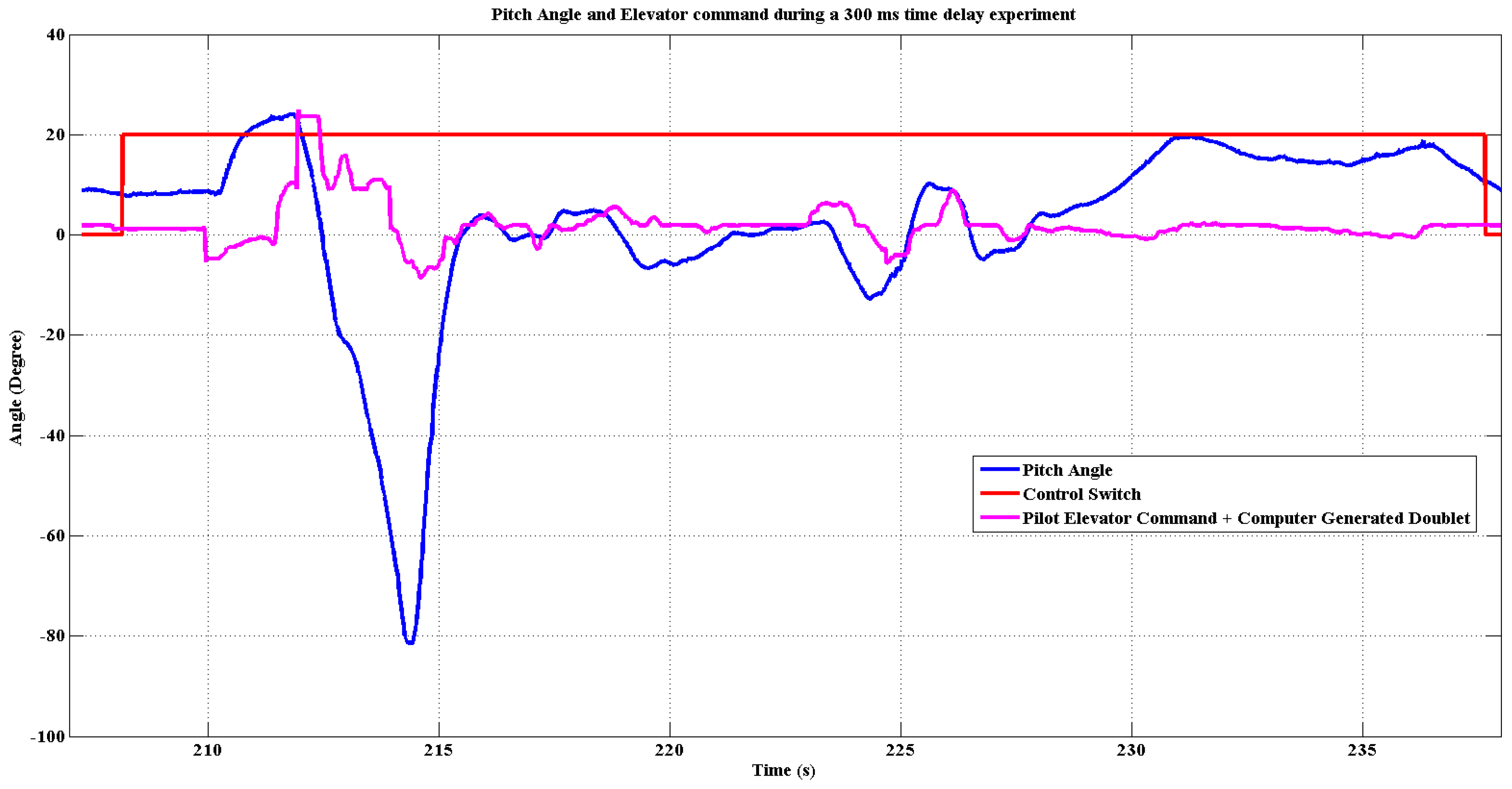
21] which is followed in a counter-clockwise direction. All PIO experiments take place in PIL mode and the flight experiments conducted in Non-PIL mode (no delay injection or rate limiting of the actuators) acts as control and provides a baseline for PIO experiments. The experiment starts when when the pilot activates a control switch. The control switch is a switch on the R/C transmitter which is used by the pilot to notify the on-board computer to trigger a special event such as adding delay or rate limiting to pilot commands. Immediately after the activation of the control switch the on-board computer also generates an elevator doublet to perturb the aircraft state, prompting pilot controls for stabilizing the flight trajectory.
Figure 2 shows a test flight trajectory with multiple control switch activations. During the flight the pilot location is approximately at (100,0) coordinate point in
Figure 2 and he/she uses visual reference for feedback.
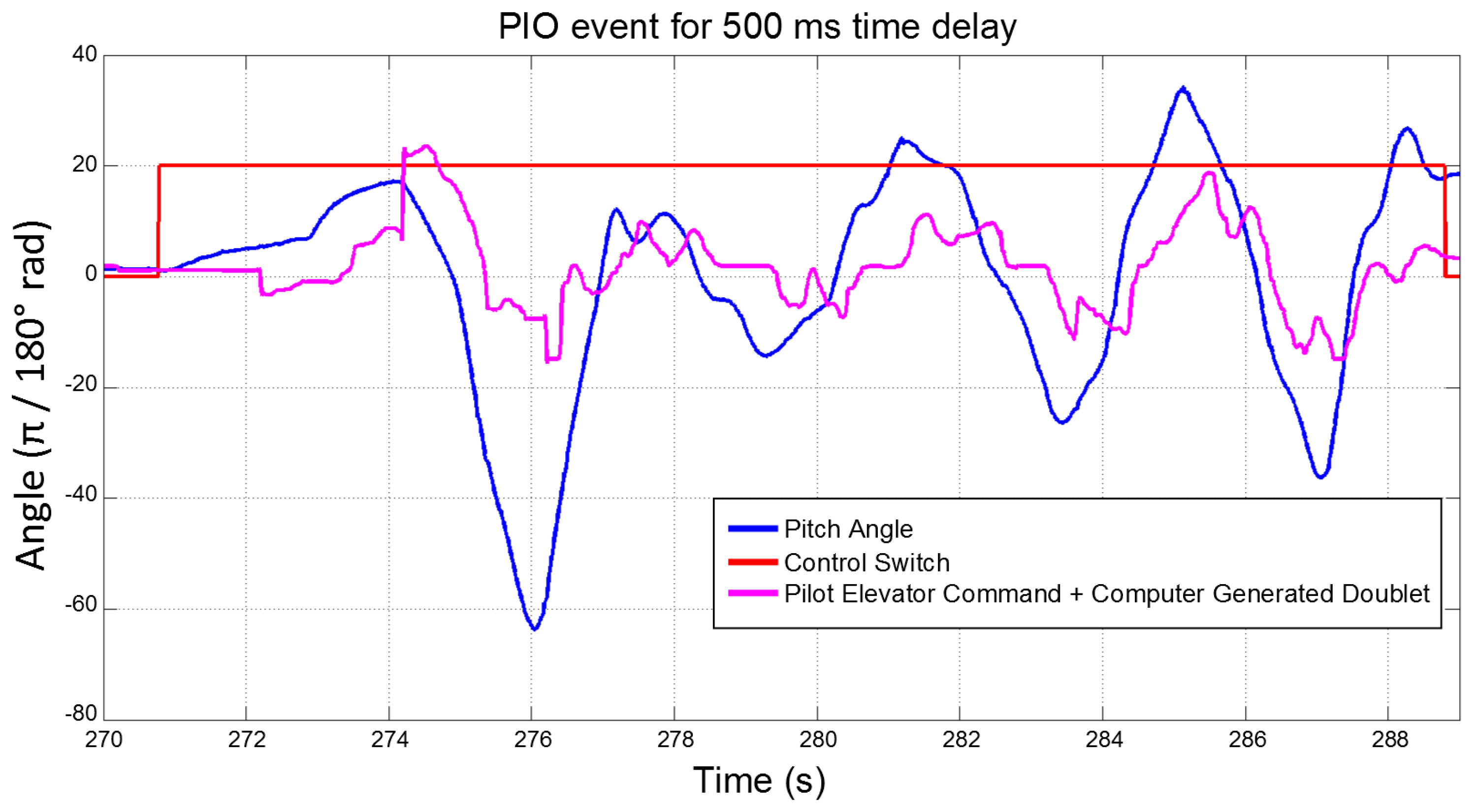
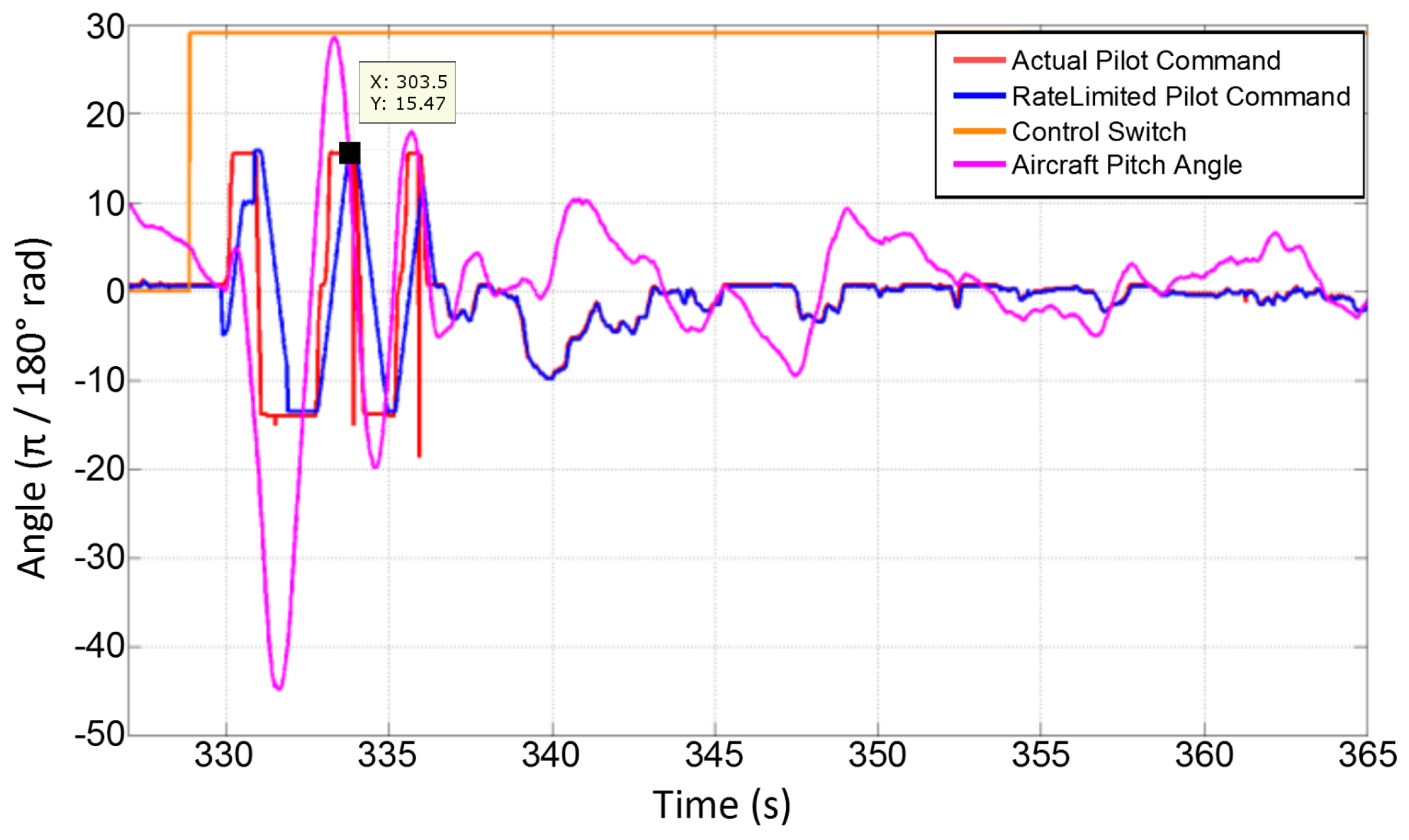
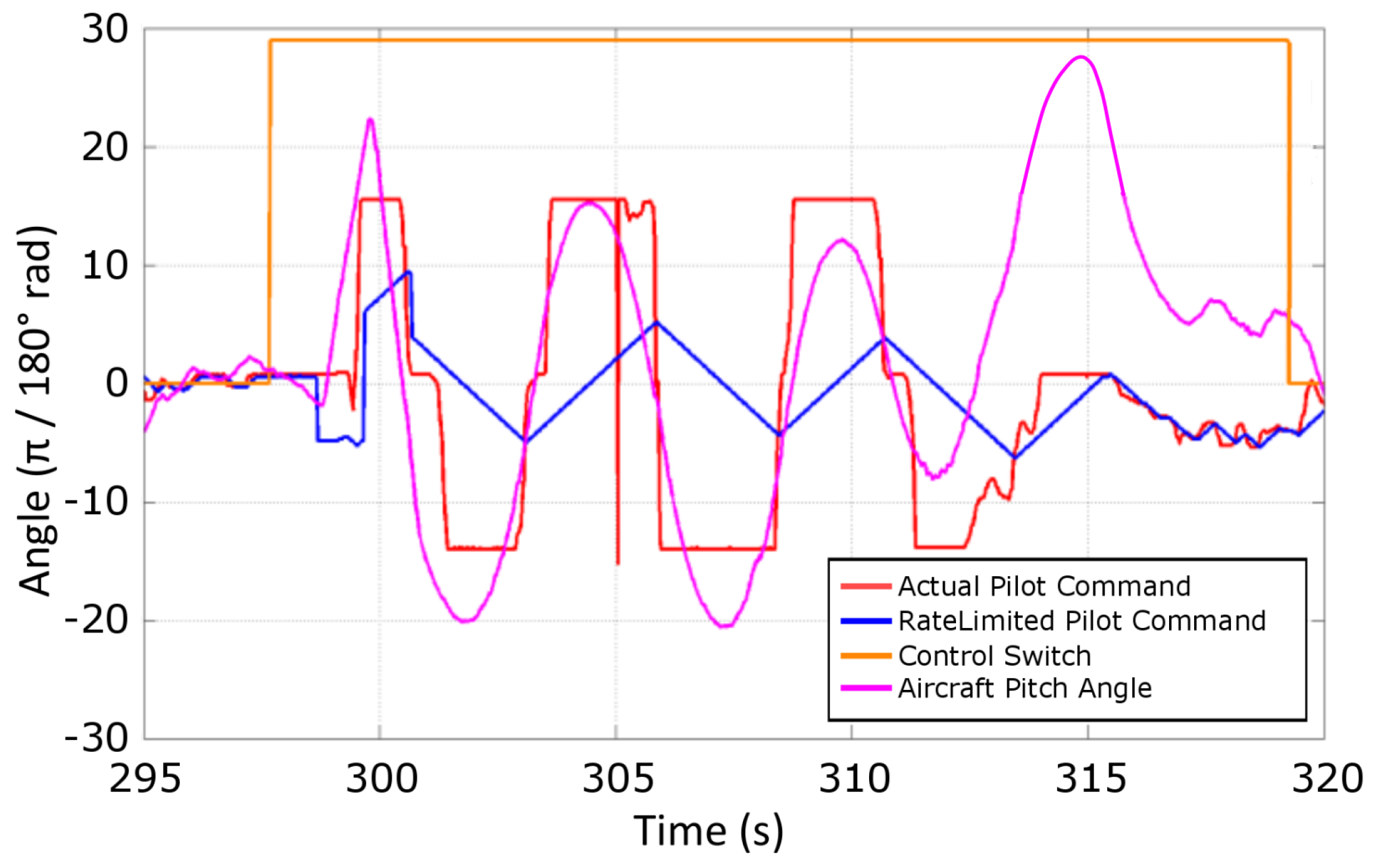
For Category 1 PIO experiment, each control switch activation adds an additional delay of 100 ms to the pilot’s elevator command and for Category 2 PIO experiment each control switch activation limits the elevator rate to 80% of the previous rate. Since the control switch activation is in the pilot’s control it can be assumed that the pilot roughly knows the severity of delay or rate limit (based on the number of control switch activation). This can lead to the pilot preemptively generating control actions for an anticipated effect of rate limit or delay. For future experiments, it was decided that the control switch will not be activated by the pilot but by the experimenter. However, for the present case, it was observed that in each flight session it takes time for the pilot to get fully accustomed to the PIO experiments before they start pre-empting the time delay or rate limit effects on “Phastball”.
A total of 21 PIO flight experiments and an additional 26 flights for human pilot characterization were carried out using three pilots over a course of eight-month time period. Out of 21 PIO flights, 6 flight tests were carried out with injected time delay (Category 1) in the PVS and 14 flight tests were carried out with elevator rate limiting (Category 2). During each PIO flight each straight leg of the elliptical flight path was used for analysis. During each flight test multiple values of delay and rate limiting were used [
18]. For pilot study the data from straight leg and landing was used due to pilot workload being different for the two scenarios [
19].
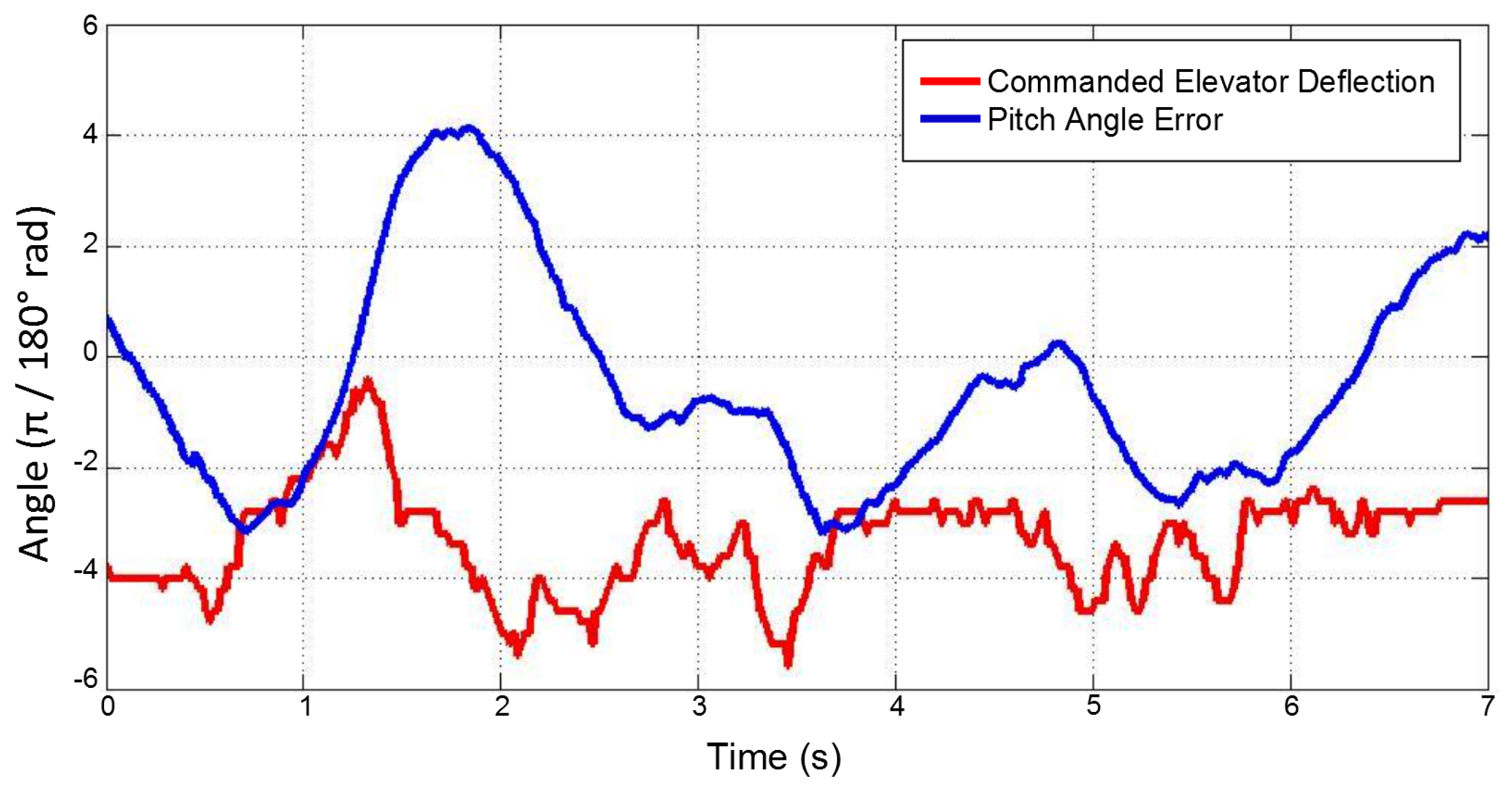
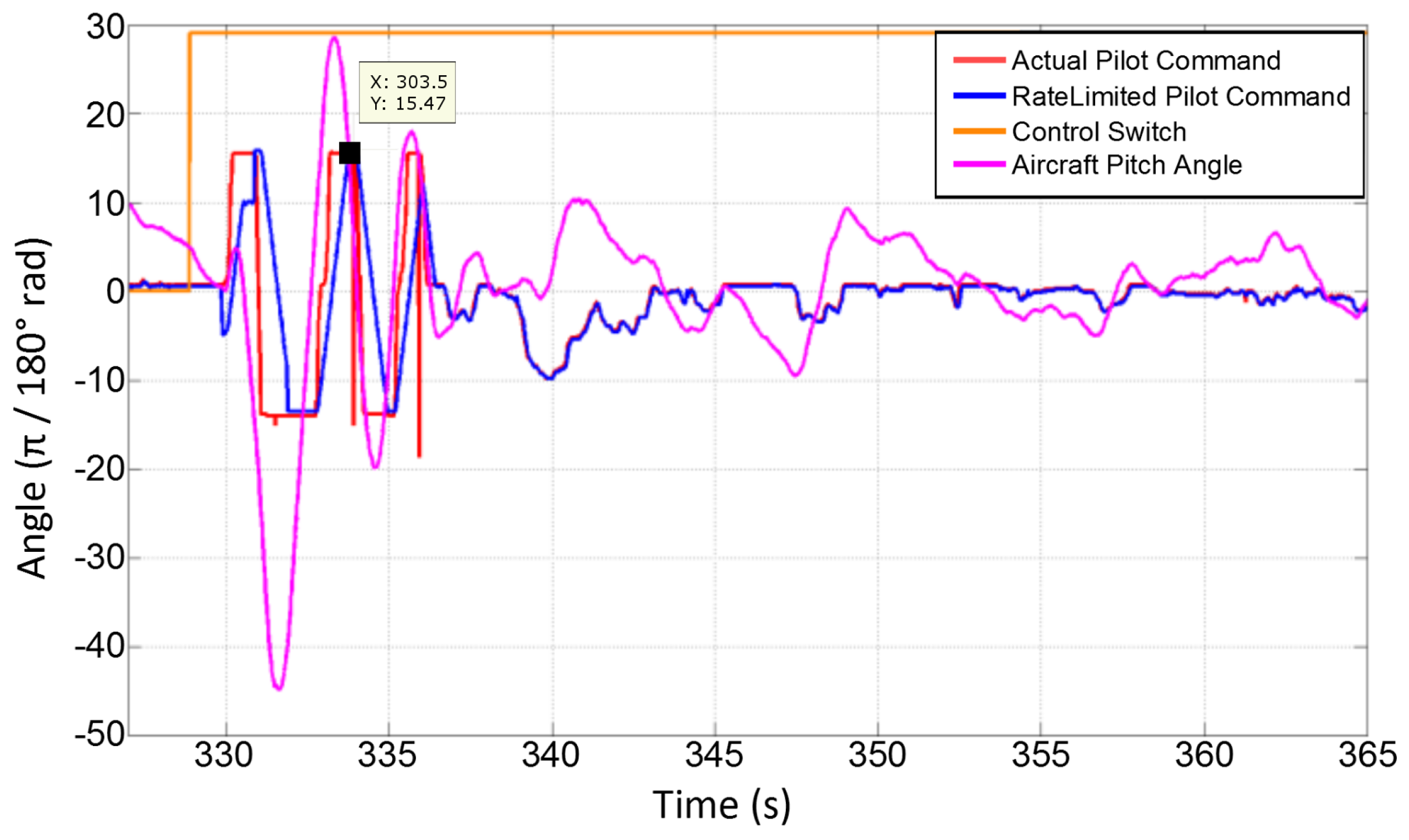
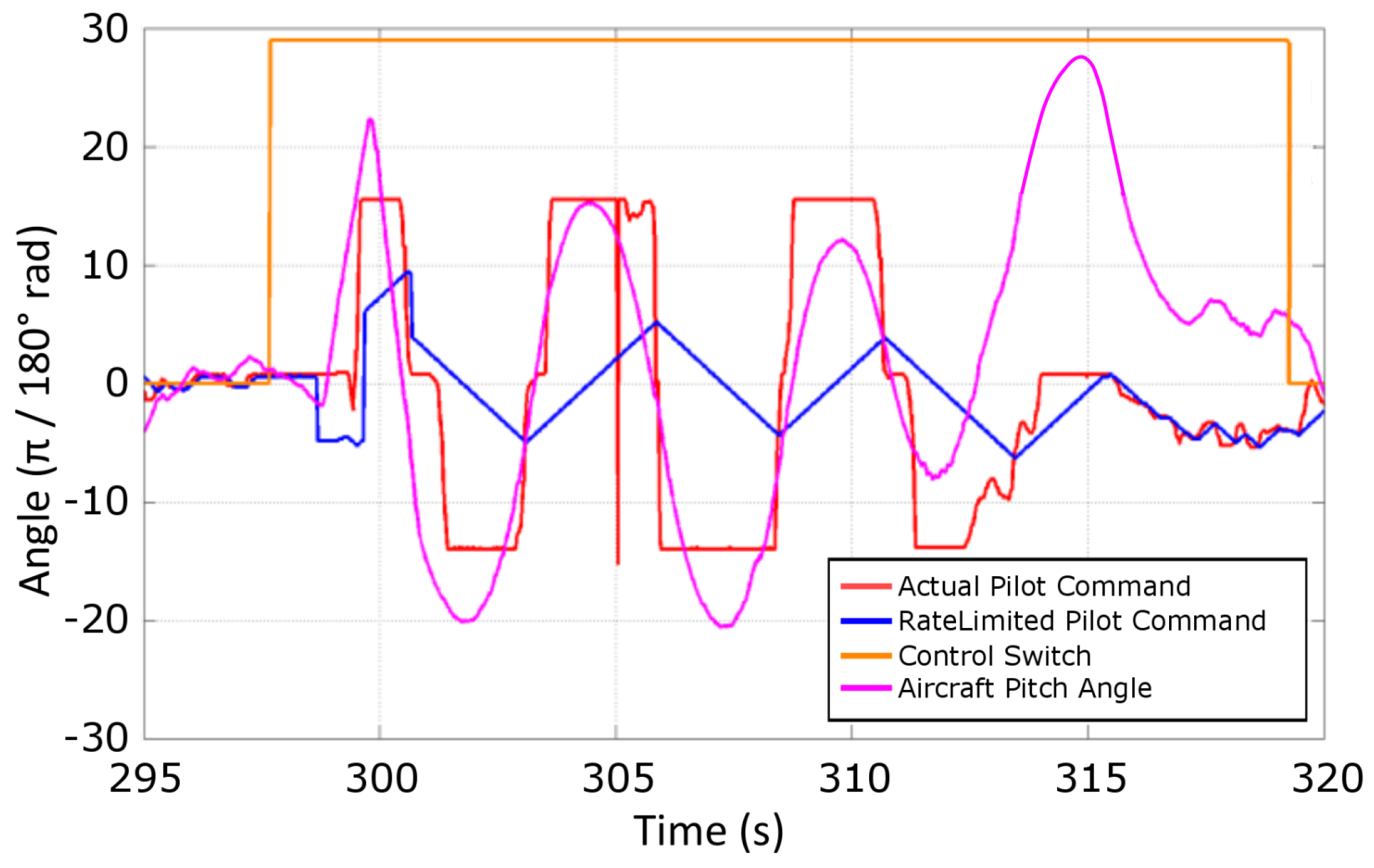
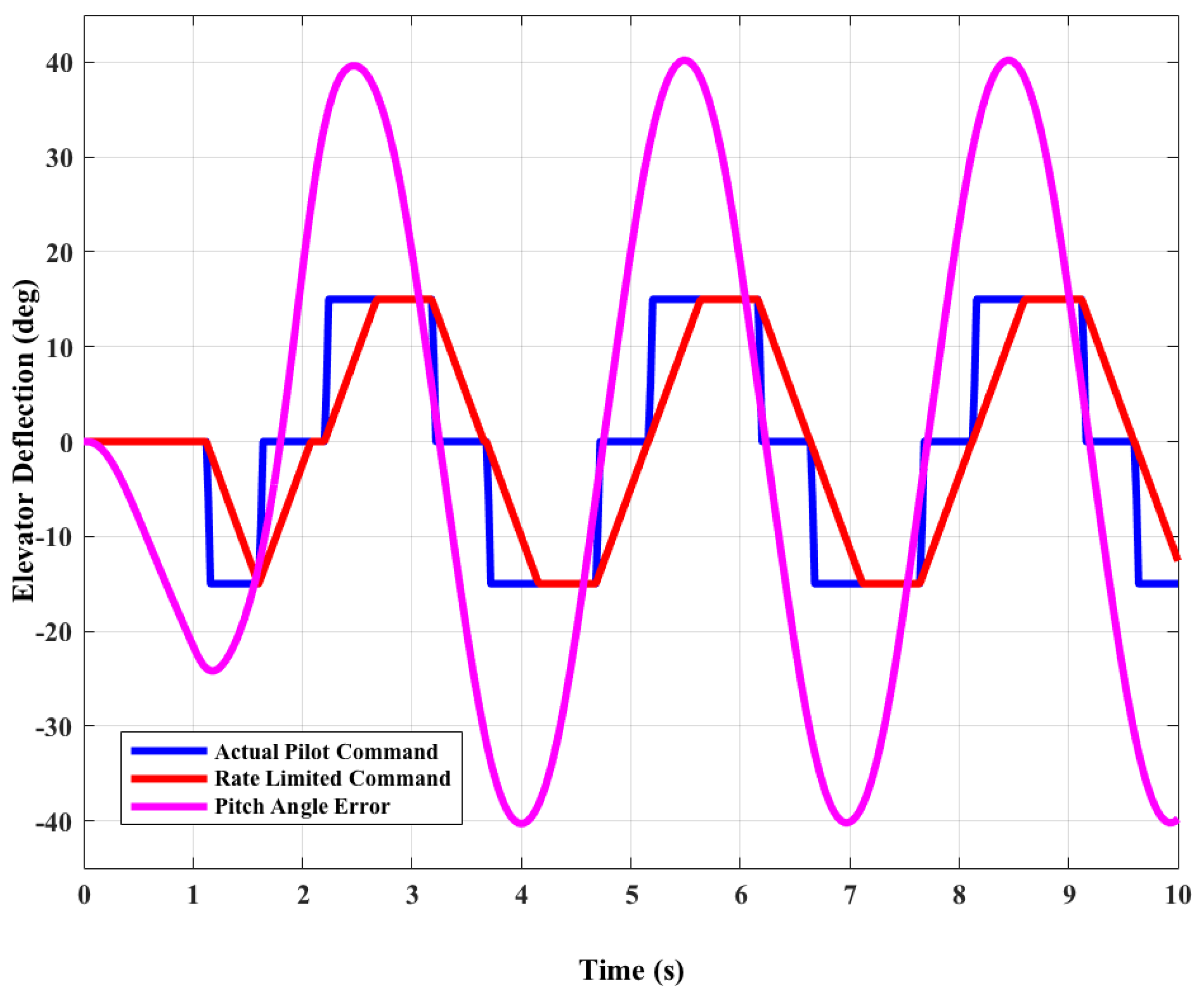
Figure 3 shows a sample Category 1 PIO event and
Figure 4 shows a sample Category 2 PIO observed during a “Phastball” PIO experiment.
4. “Phastball” Pilot Command Analysis and Pilot Model Parameter Estimation
PIO is the result of pilot-aircraft interactions and it is important that while analyzing the PIO susceptibility of an aircraft, human control nature is also taken into account to get a holistic view of the PIO process. Initial analysis of human pilot command from the flight data was carried out using Fourier analysis to obtain information regarding the frequency properties of the human pilot command [
37].
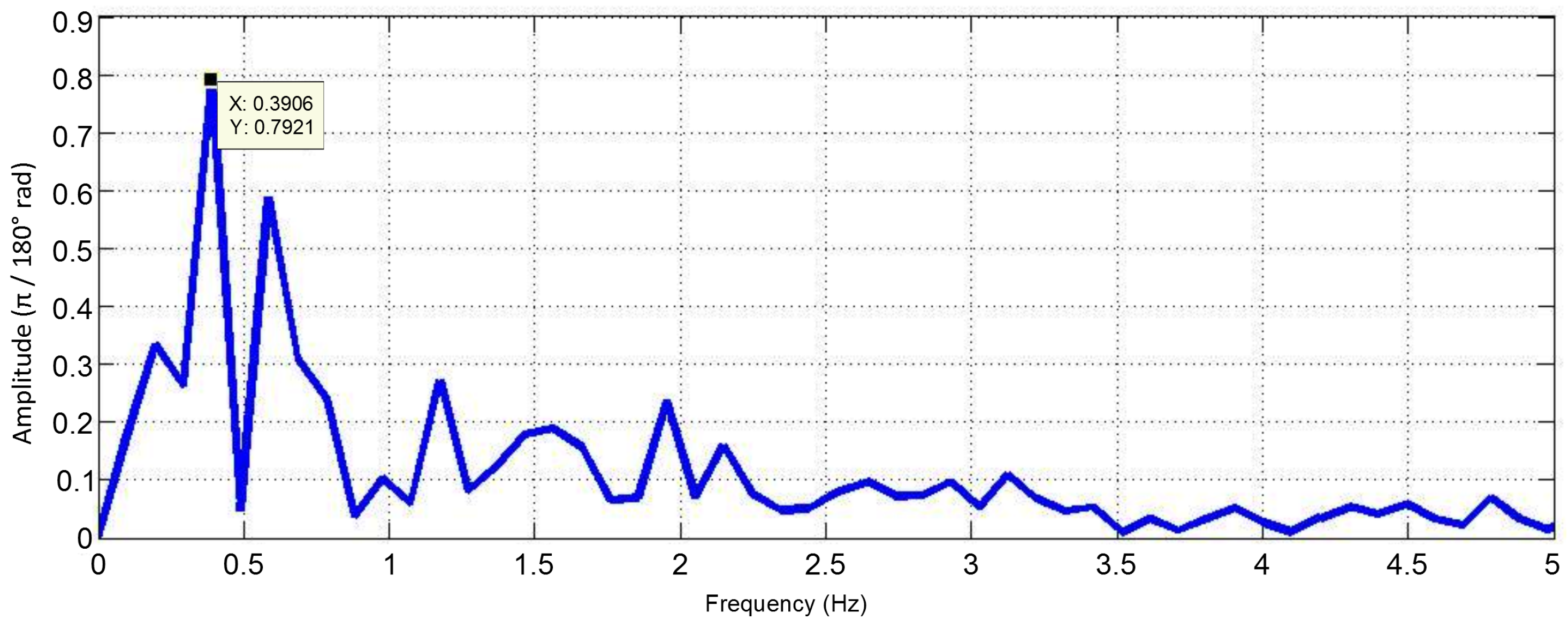
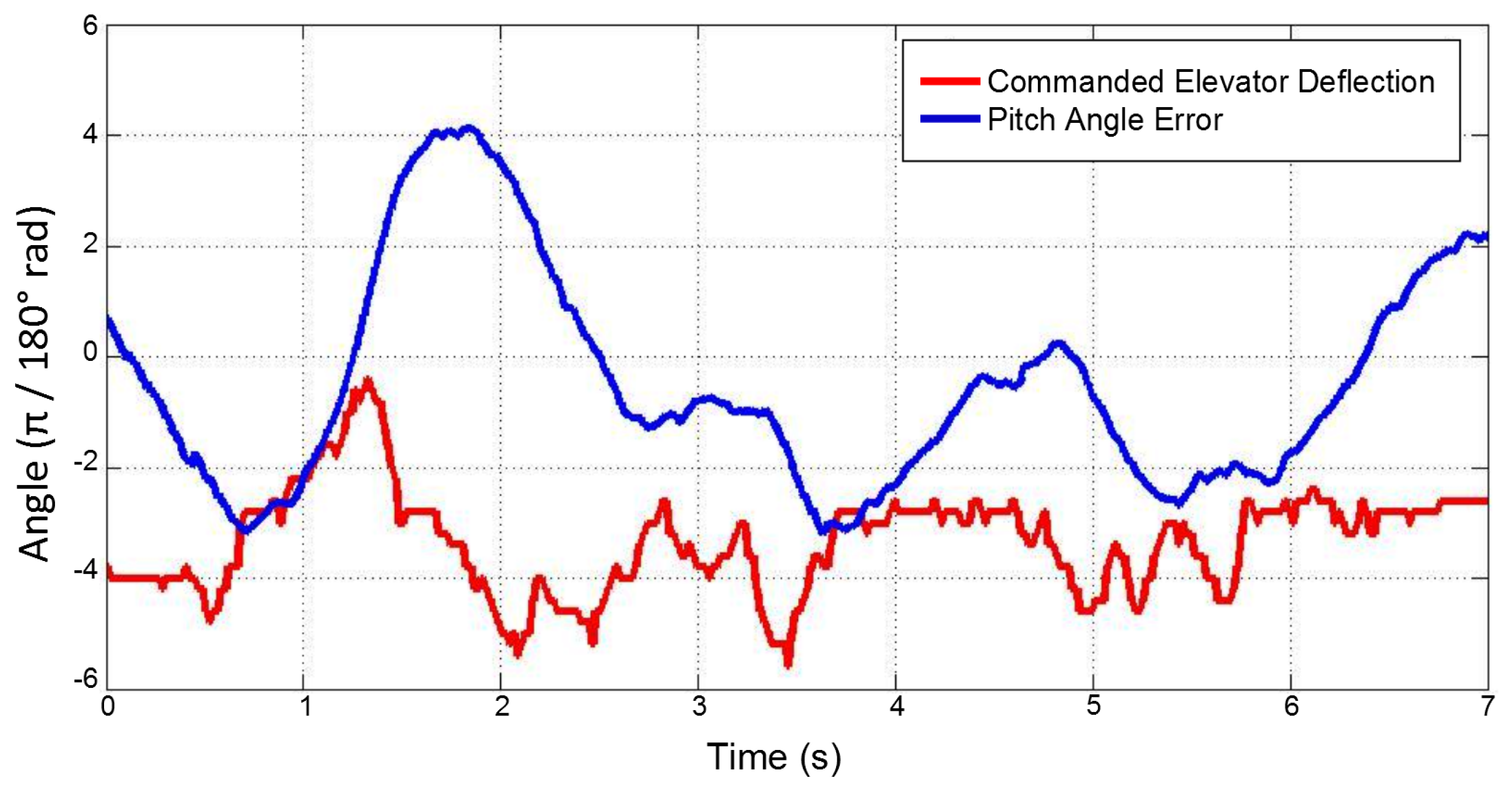
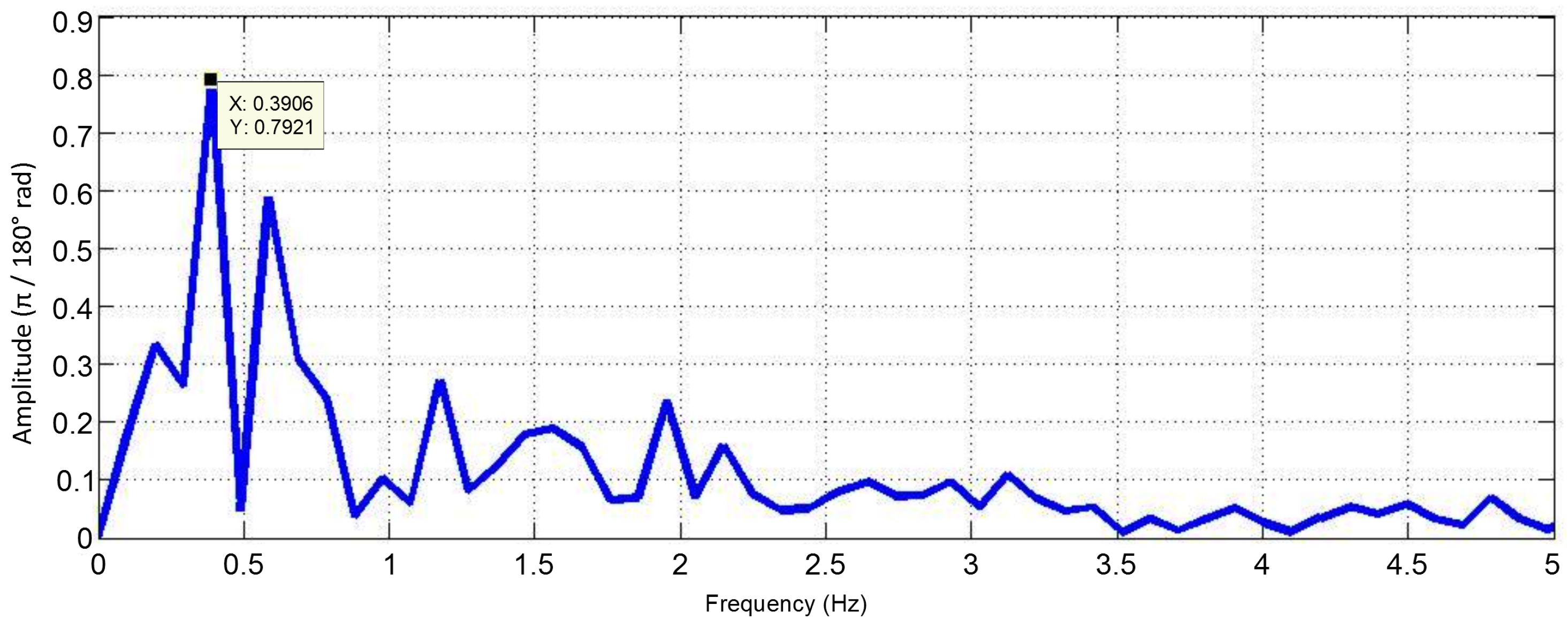
Figure 9 presents a typical pilot response obtained from flight data recorded at 50 Hz and
Figure 10 shows its amplitude spectrum during a Steady Level Flight Phase (SLFP). The pitch error is calculated knowing that “Phastball” is trimmed to fly at two degree pitch angle in SLFP. It should be noted that an R/C aircraft pilot typically does not have access to instrumented data; therefore, an R/C pilot has to visually estimate the aircraft pitch angle. The error calculated from the data may not be the exact error perceived by the pilot during the flight. It is, however expected that the pilot would roughly track a constant pitch reference and compensate for the tracking error to keep the aircraft straight and level during the straight legs of the flight.
The major frequencies of the pilot control command are concentrated in the low frequency region. The SLFP condition gives a baseline against which the pilot’s performance during other flight conditions can be compared. It can be assumed that during SLFP the pilot task demand is low as s/he only has to maintain the necessary speed, pitch, and heading angles to keep the aircraft straight and level.
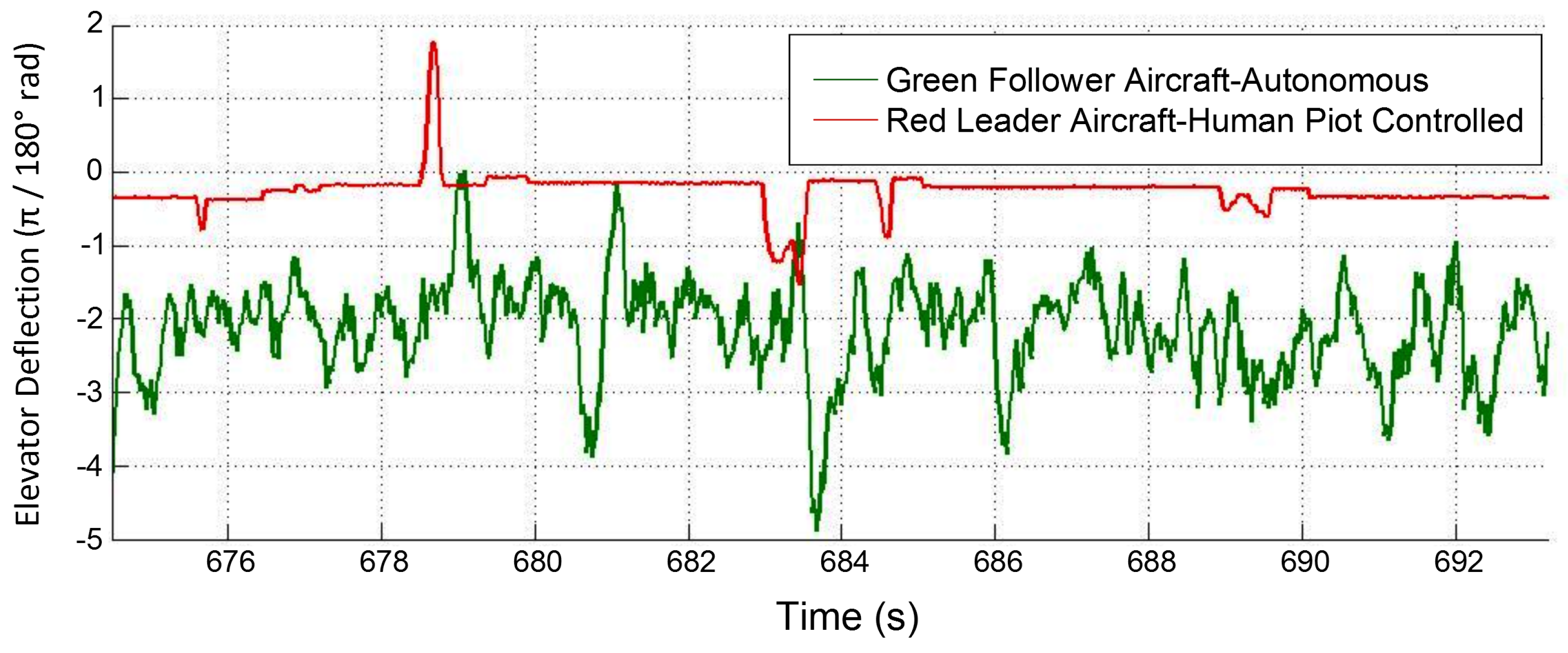
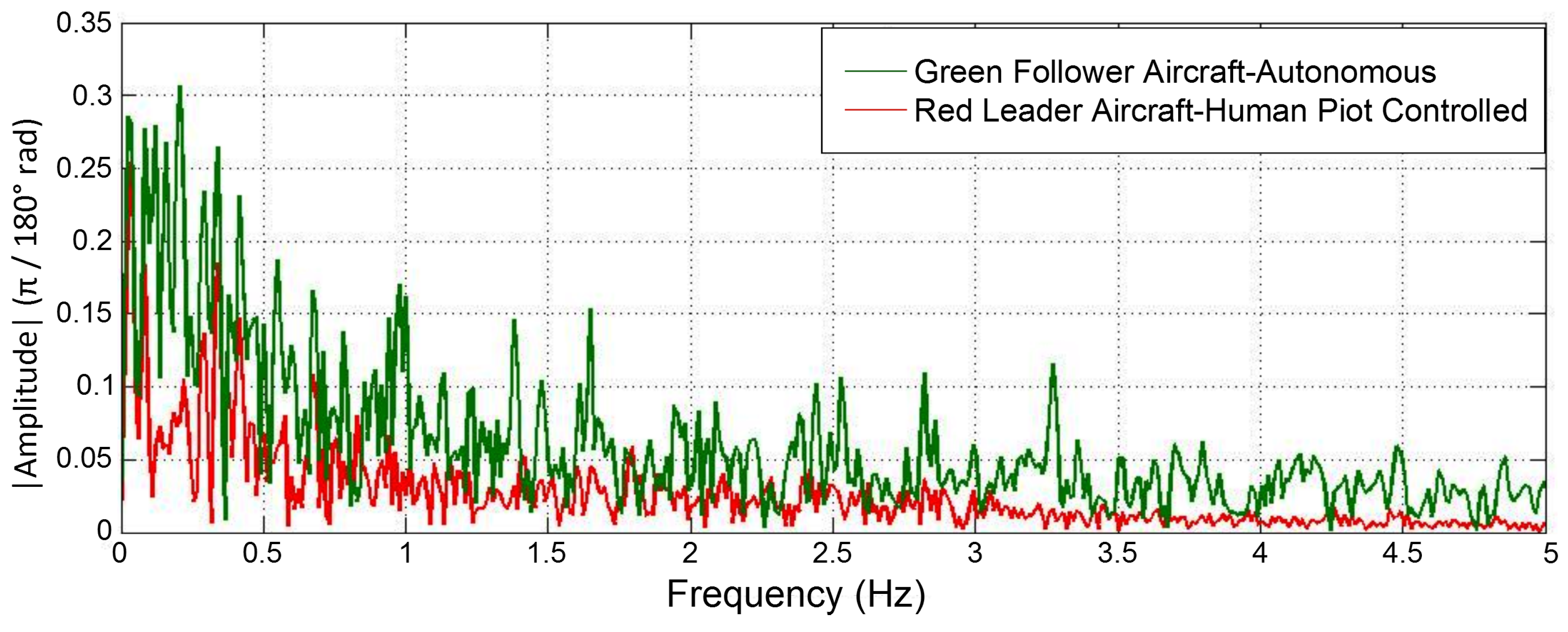
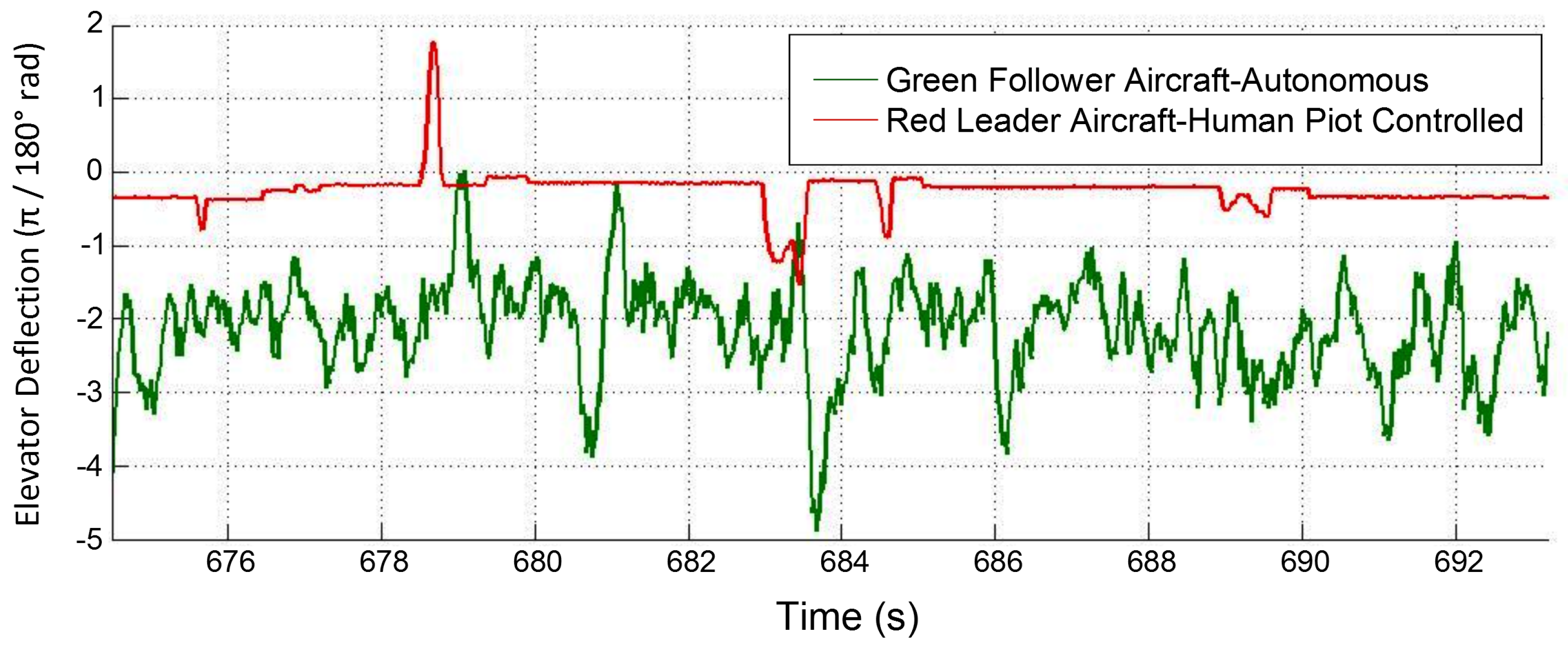
Also during the flight season, formation flight experiments with two aircraft were carried out [
38]. A red “Phastball” aircraft was designated as the leader and was controlled manually by a human pilot and a follower green aircraft was under fully autonomous control. The control output to the elevator was compared for the two aircraft in formation flight for SLFP.
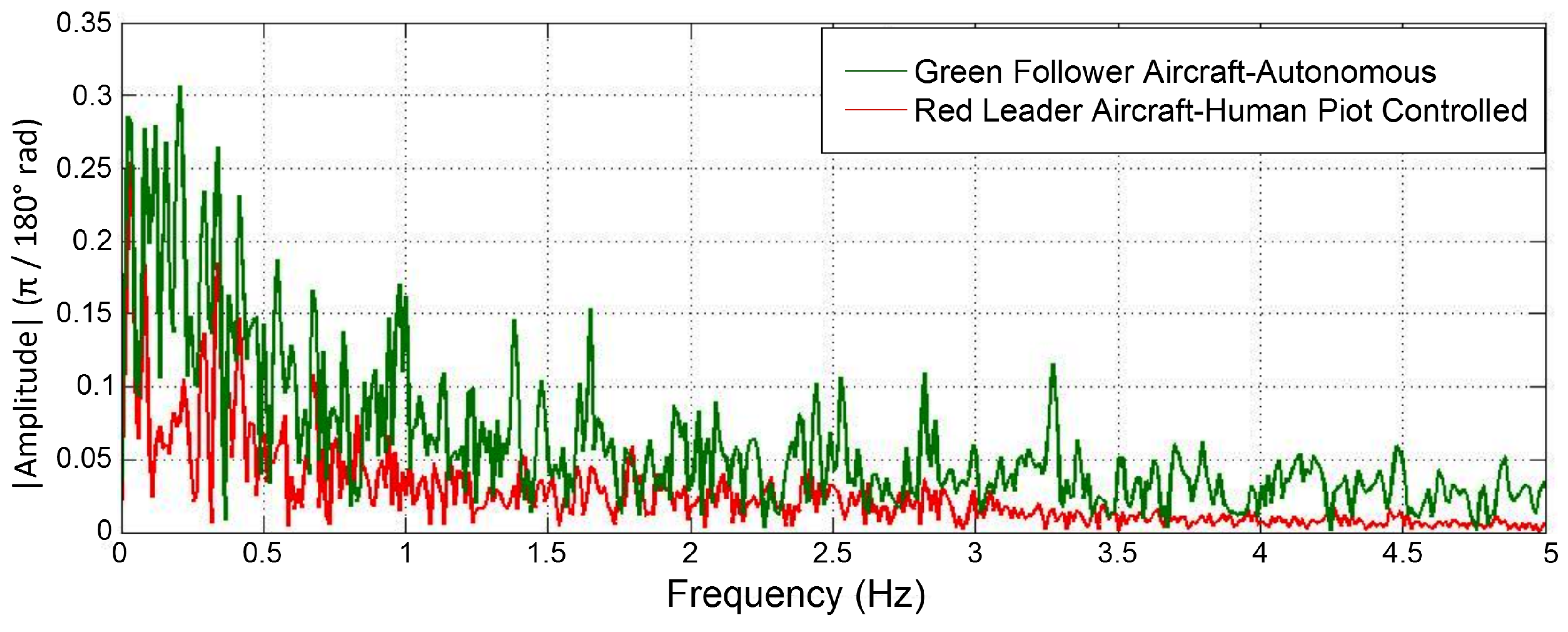
Figure 11 shows the comparison of elevator control output and
Figure 12 shows the amplitude spectrum of elevator control output for both red and green “Phastball” during SLFP with a separation of 30m between the two aircraft along the direction of the fuselage.
From
Figure 11 it can be seen that during SLFP the human pilot reacts very selectively and most of the time the pilot control output is constant at the trim value of the elevator deflection. Also in the amplitude spectrum
Figure 12 the autonomous controller output has several peaks spread over a wide frequency range as it constantly works to reduce the pitch error. Human pilot on the other hand provides control input intermittently and the pilot input during one intermittent period might be of different characteristics than the other intermittent period. Also, the peaks in the amplitude spectrum of the pilot control output seen in
Figure 10 and
Figure 12 are mostly bounded within 1 Hz. Further analysis was carried out to find the delay between the pilot command and observed pitch angle error which ranged from 200 to 1040 ms with an average of 642 ms of delay.
Pilot Model Parameter Estimation
In accordance with the existing literature [
12,
39] a lead-lag pilot model with delay was assumed and non-linear least squares estimation technique was used to find the pilot model parameters. The pilot model acts on the pitch error and generates elevator commands. The following quasi-linear pilot model was used.
where
is the lead constant,
is the lag constant of the pilot,
is the pilot gain,
τ is the pilot inherent delay, and
η is the pilot nonlinear remnant. The input to the pilot model in Equation (
6) is the pitch error (
) visually perceived by the human pilot and the output is the elevator stick deflection (
). The pitch error is calculated by subtracting the actual pitch angle from the “Phastball” trim pitch angle of
. McRuer pilot model has been shown to perform well while modeling single-input single-output compensatory manual task. McRuer pilot model has been shown to perform well while modeling single-input single-output compensatory manual task. In this study, the pilot is only using vision feedback and generating control commands. A simplified assumption is made that the pilot is using visual information about pitch error to generate elevator deflection and that the McRuer model is still valid. Whereas in a manned aircraft the pilot has multiple feedback such as motion cues, vision cues etc. For “Phastball” it was noticed that the power in the high frequency region (from amplitude spectrum) is negligible compared to that in the low frequency region, therefore for “Phastball” pilot command analysis, only the parameters of the linear part of the pilot model were estimated. For analysis purposes the actual pilot output was shifted by the known system delay (70 ms) of manual mode and only
,
,
, and
τ need to be estimated.
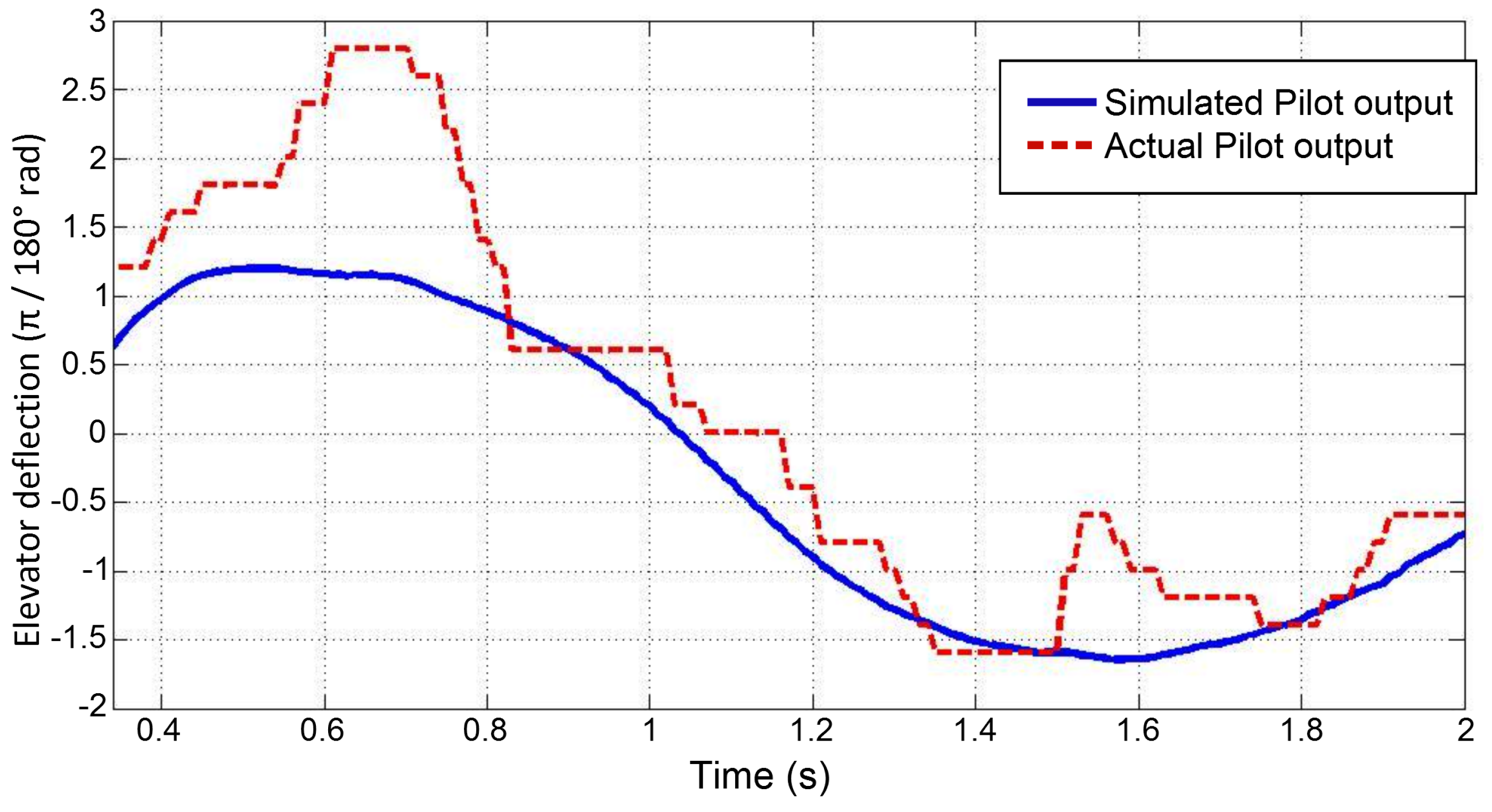
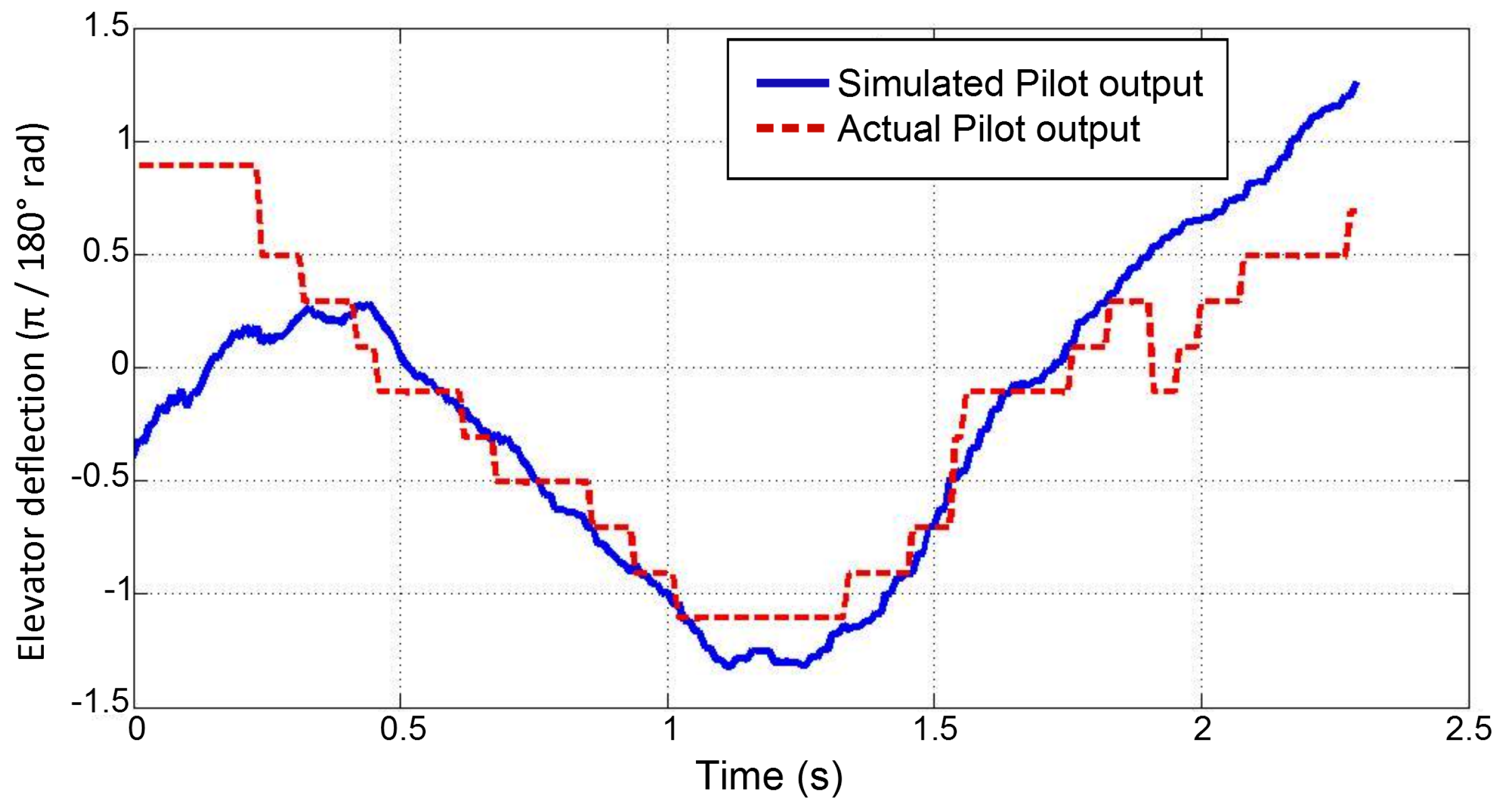
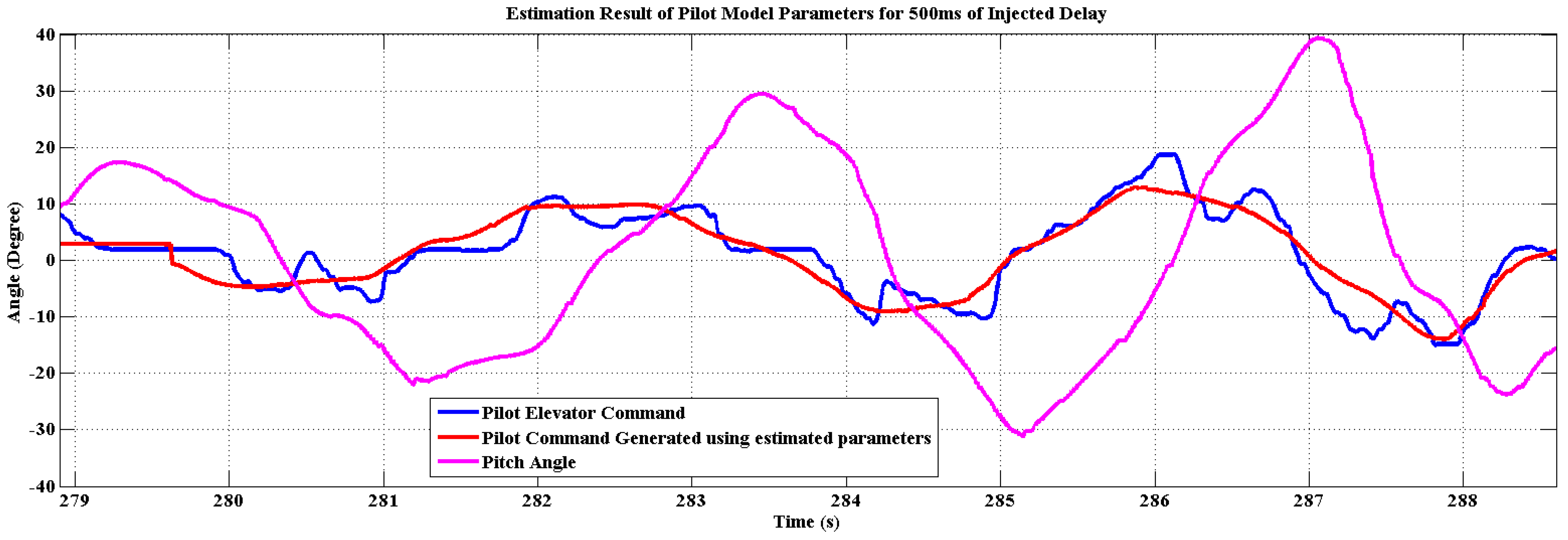
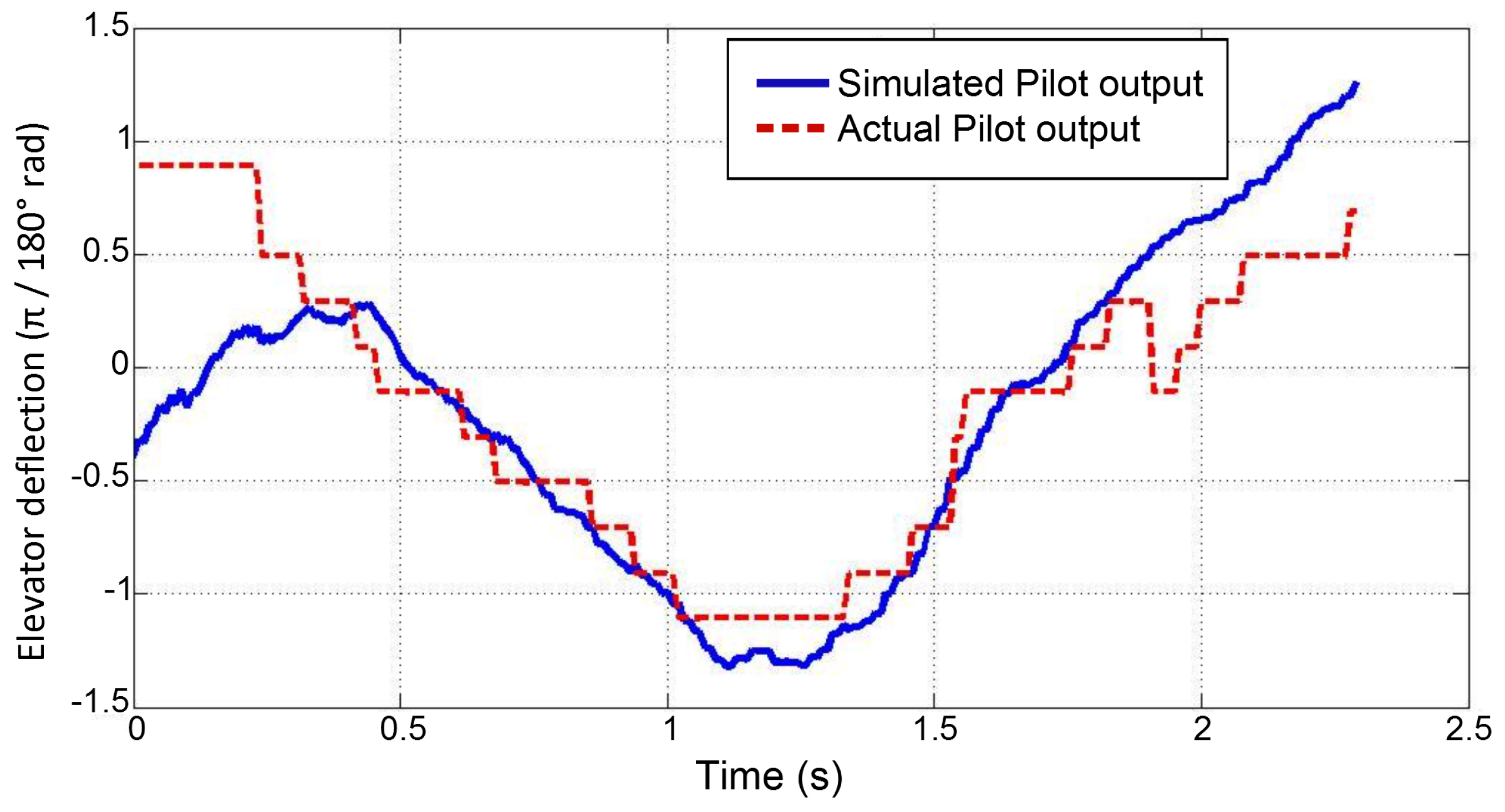
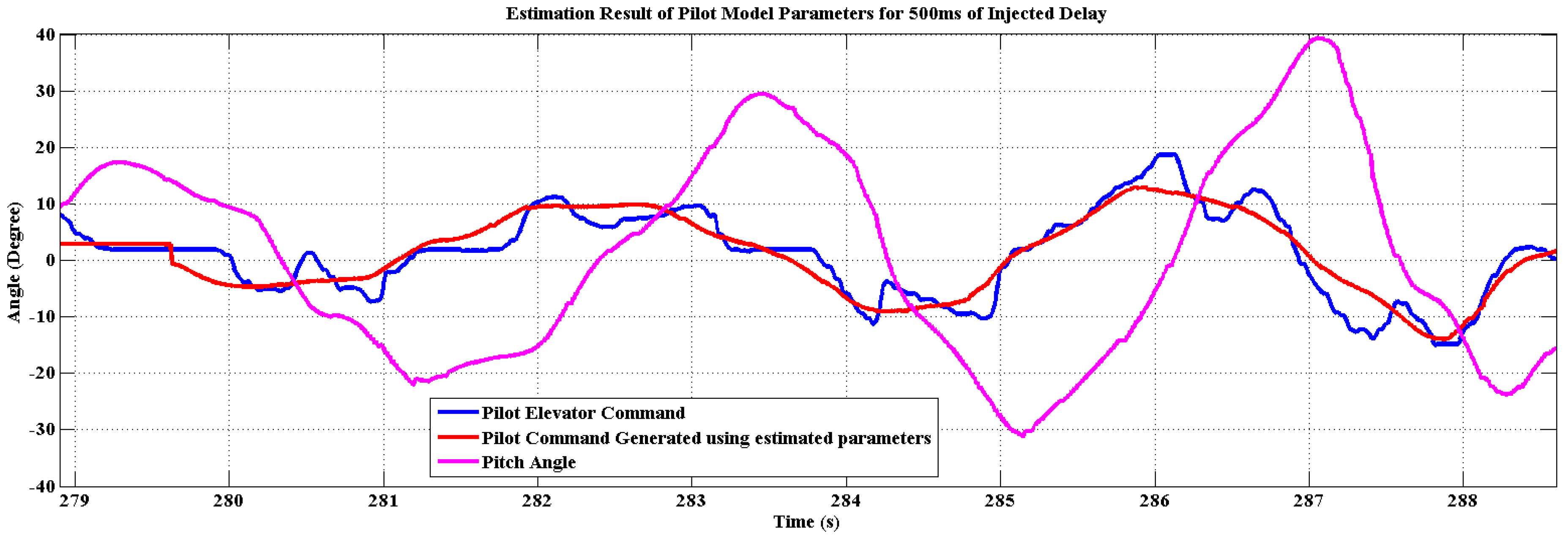
Figure 13 and
Figure 14 show the estimation result and validation results for the analysis carried out for a typical SLFP data set. The estimation was carried out using non-linear least square estimation in Matlab [
19]. Data from the straight leg portion and the landing portion of the 26 flight tests carried out for studying human pilot were used for the estimation. The estimated parameters for each data set were used in the validation of 2 randomly selected data set from the reminder of the data to negate any inherent bias.
The estimated values of
,
,
, and
τ are 0.4148, 0.0284, 0.0837, and 0.3089 s respectively. The total delay induced by the pilot (including lead-lag and pilot delay) is 360 ms, which when added with the Non-PIL system delay of 70 ms (
Section 2) is close to the delay of 460 ms observed in the data, obtained using shifting the pitch error input data and pilot output data to get the maximum correlation. The values of the mean and standard deviation of the residuals are 0.3576 and 0.5303 respectively.
Table 4 gives the range of values of parameters for the lead-lag pilot model for SLFP obtained for 12 different SLFP data sets obtained from “Phastball” flights [
19].





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}