1. Introduction
Mathematical modeling of some phenomena becomes more realistic and suitable by non-continuous dynamical equations, so, in this regard, it is necessary to consider both continuous and discrete models for such problems. These equations can be interpreted by idea time scales, which was introduced for the first time in 1988 by Stefan Hilger [
1] (for more details please see [
2]). The time scales calculus is a unification of the continuous and discrete analysis, which describes the difference and differential equations together as well as allowing us to deal with combining equations of two differential and difference equations simultaneously (see, for example, [
2,
3,
4,
5]).
The theory of dynamic equations on time scales has many interesting applications in control theory, mathematical economics, mathematical biology, engineering and technology (see [
2,
6,
7,
8,
9]). In some cases, there exists uncertainty, ambiguity or vague factors in such problems, and fuzzy theory and interval analysis are powerful tools for modeling these equations on time scales. In [
10], authors introduced and considered the notions of delta derivative and delta integral to fuzzy valued functions on time scales. These definitions may accurately describe fuzzy dynamic processes where time may flow continuously and discretely at different stages in the one model; in other words, these concepts are useful in modelling fuzzy start–stop processes.
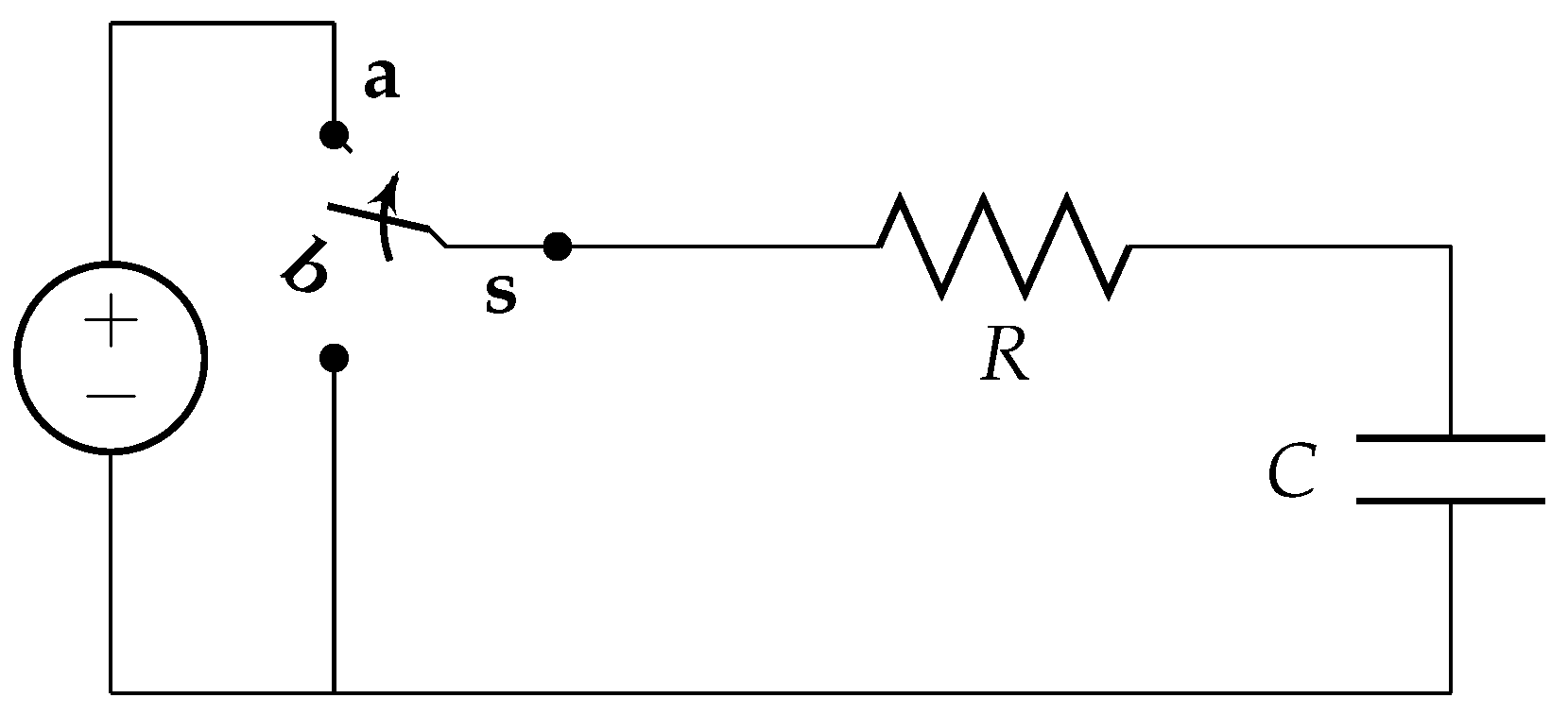
As an application, consider an electric circuit of resistor R, with unit Ω, in a series with capacitance C farads and a generator of V volts.
Note that, in an electrical
circuit when switch
is closed on
, the capacitor is charged through the resistor and when the switch is afterward closed on
, the capacitor discharges through the resistor. Suppose we discharge the capacitor periodically every time unit and assume that the discharging takes
but is small on time units. Thus, we can simulate it by using the time scales
. Now, according to the assumptions of the problem, we have
The dynamic Equation (
1) describes the time variation of the charge
q on the capacitor
Figure 1 and
t is in a time scale and
is a delta derivative of
q with respect to
t. Then, the problem along with a fuzzy initial condition is a first order fuzzy dynamic equation on the time scale
P.
Recently, the theory of fuzzy difference equations in [
11] and a theory of fuzzy differential equations [
12,
13,
14] has been studied separately. In the current work, we are going to incorporate these two theories and describe a new fuzzy theory that is called the theory of fuzzy dynamic equations on time scales, and it is a generalization of the theory of fuzzy differentials and fuzzy difference equations.
To this end, we aim to study the existence and uniqueness of solutions to fuzzy dynamic equations on time scales with a new metric on fuzzy continuous functions on time scales, which is defined in terms of the exponential functions on time scales. This metric greatly simplifies the application of Banach’s theorem for the existence and uniqueness proofs. Indeed, a significant interest of this work is to utilize the rich qualities of the exponential functions on time scales. In fact, the first metric in terms of the exponential functions on time scales is introduced by Tisdell and its colleague [
15], and we generalized it from crisp case to fuzzy case.
This paper is organized as follows. In
Section 2, notions of the theory of fuzzy and time scales are introduced. Then, the fuzzy delta derivative and delta integral are defined in
Section 3. In addition, a new metric on the space of fuzzy continuous functions on time scales is introduced. Finally, in the last section, the existence and uniqueness of the solution to a nonlinear fuzzy dynamic equations on time scales is established.
2. Preliminaries
For a better understanding, the notations used throughout the paper and keeping the paper somewhat self-contained, this section contains some preliminary definitions and associated notations.
Definition 1. Let X be a nonempty set. A fuzzy set u in X is characterized by its membership function . Then, is interpreted as the degree of membership of an element x in the fuzzy set u for each [16]. Let us denote by
the class of fuzzy subsets of the real axis (i.e.,
), satisfying the following properties:
u is normal, i.e., there exists with ,
u is a fuzzy-convex set (i.e., ,
u is upper semicontinuous on ,
is compact, where denotes the closure of a subset.
Then, is called the space of fuzzy numbers. Obviously, . Here, is understood as . For , denote and .
Using the definition of fuzzy numbers, it follows that, for any , is a bounded closed interval. The notation denotes explicitly the -level set of u. We refer to and as the lower and upper branches on u, respectively.
For and , the sum and the product are defined by , , , where means the usual addition of two intervals of and means the usual product between a scalar and a subset of .
Theorem 1. According to Bede et al. [13].If we denote then is the zero element with respect to +, i.e., , for all .
For any with or and any , we have ; for general , the above property does not hold.
For any and any , we have .
For any and any , we have .
Definition 2. Let . If there exists such that , then z is called the H-difference of x and y, and it is denoted by [13]. Let
,
be the Hausdorff distance between fuzzy numbers, where
,
. The following properties are well-known (see [
12,
13]):
,
,
,
where
is a complete metric space. In addition, we define for each
,
, which
is a set of all fuzzy continuous functions on
I.
Definition 3. Given , the -difference is the fuzzy number w, if it exists, such thatIf exists, its cuts are given byand if exists. If and are satisfied simultaneously, then w is a crisp number [17,18]. Remark 1. In the fuzzy case, it is possible that the -difference of two fuzzy numbers does not exist. If exists, then exists and . The following properties have been obtained in [17,18]. Proposition 1. Let be two fuzzy numbers [17,18] ; then,if the -difference exists, it is unique;
or whenever the expressions on the right exist; in particular, ;
if exists in the sense (i), then exists in the sense (ii) and vice versa;
;
;
if and only if ; furthermore, if and only if .
Definition 4. A time scale is a non-empty, closed subset of , equipped with the topology induced from the standard topology on [2]. According to Definition 4, a time scale can be continuous and discrete or continuous-discrete. Hence, the definition of jump operator is very important to time scales.
Definition 5. The forward (backward) jump operator at t for (respectively, at t for ) is given byAdditionally, , if , and if . Furthermore, the graininess function is defined by and also the left-graininess function is defined by [2]. It is enough to recognize that, for connected points, the forward and backward jump operators return the same element of the time scale that was drawn from the domain. However, for non-connected points, the forward and backward jump operators return the next and previous elements of the time scale, respectively. The jump operators then enable the classification of points in a time scale in the following way:
Definition 6. If , then the point t is called right-scattered; while, if then t is termed left-scattered. If and then the point t is called right-dense; while if and , then we say that t is left-dense [2]. Definition 7. A mapping is rd-continuous if it is continuous at each right-dense point and its left-side limits exist (finite) at left-dense points in . We denote the set of rd-continuous functions from to by .
Definition 8. Fix and . Define to be the real number (provided it exists) with the property that, given , there is a neighborhood of t (i.e., ) such thatfor all . is called the -derivative of f at t [2]. Definition 9. We say that a function is right-increasing at a point provided that [19]: Similarly, we say that f is right-decreasing if in , and in , .
Theorem 2. Suppose is differentiable at [19]. If , then f is right-increasing at the point . If , then f is right-decreasing at the point . Here, we review some properties of the exponential function on time scales. For more details, we refer to Definition 2.30 in [
2].
A function
is called regressive if
for all
and the function
p is called positively regressive if
for all
. If
is a regressive function and
, then (see Theorem 2.33 in [
2]) the exponential function
is the unique solution of the initial value problem
The following properties of the exponential function will be used in the last section:
,
The set is defined to be if has a left-scattered maximum m. Otherwise, .
3. Fuzzy Delta Derivative and Integral on Time Scales
Definition 10. Assume that is a fuzzy function and let [10]. Then, f is said to be right fuzzy delta differentiable at t, if there exists an element of with the property that, given any , there exists a neighborhood of t [i.e., for some such that for all with . Definition 11. Assume that is a fuzzy function and let [10]. Then, f is said to be left fuzzy delta differentiable at t, if there exists an element of with the property that, given any , there exists a neighborhood of t such that for all with . In the above definitions and are called, respectively, right fuzzy delta derivative and left fuzzy delta derivative at t.
Definition 12. Let be a fuzzy function and [10]. Then, f is said to be -Hukuhara differentiable at t, if f is both left and right fuzzy delta differentiable at and and we will denote it by . We call the -Hukuhara derivative of f at t. We say that f is -differentiable at t if its -derivative exists at t. Moreover, we say that f is -differentiable on if its -derivative exists at each . The fuzzy function is then called the -derivative of f on .
Proposition 2. If the -derivative of f at t exists, then it is unique. Hence, the -derivative is well defined [10]. Lemma 1. Assume that is -differentiable at , then f is continuous at t [10]. Theorem 3. Assume that is a function and let , then we have the following [10]:If f is continuous at t and t is right-scattered, then f is -differentiable at t with If t is right-dense, then f is -differentiable at t iff the limitsexist and satisfy in this case
Lemma 2. If f is -differentiable at , then or [10]. Remark 2. Assuming that f is -differentiable, we say that f is -differentiable in the sense or -differentiable if, in the definition of -derivative, the -difference is equivalent to the H-difference and we say that f is -differentiable in the sense or -differentiable if -difference is equivalent to another case.
Lemma 3. If are -differentiable at , in the same case of -differentiability (both are -differentiable or -differentiable), then is also -differentiable at t and Proof. It can be easily proved by using Theorem 3. ☐
Lemma 4. If is -differentiable at , then, for any nonnegative constant , is -differentiable at t with Proof. It follows easily from the Theorem 3. ☐
Now, we present the definition of integral on time scales and give some properties of integrals on time scales for fuzzy valued functions. Let
be a time scale,
be points in
, and
be the closed (and bounded) interval in
. A partition of
is any finite ordered subset
The number n depends on the particular partition, so we have . The intervals for are called the subintervals of the partition P. We denote the set of all partitions of by .
Lemma 5. According to Guseinov and Kaymaklan [20], for each , there exists a partition given by such that, for each , eitheror Definition 13. A function is called Riemann -integrable on , if there exists , with the property [10]: , such that for any division of , with , and for any points , , we have Then, we denote the fuzzy Riemann -integral.
Definition 14. Let [10]. We define levelwise the -integral of f in , (denoted by or ) as the set of the integrals of the measurable selections for , for each . We say that f is -integrable over if and we havefor each . Theorem 4. If are -integrable on , then , where , is -integrable on and Proof. It easily follows from Definition 13. ☐
Theorem 5. If is -differentiable on and , then is -integrable over andorfor any . Proof. By setting the functions
and
defined in Definition 15 [
10] as the same constant functions, the proof immediately follows from Theorem 18 [
10]. ☐
Theorem 6. Let and let . Then, f is -integrable from t to and 4. New Metric Space
Now, we are ready to define a new metric for the fuzzy continuous functions on time scales.
Definition 15. Let D denote the Hausdorff metric on space . Let be a constant. We define the space of all fuzzy continuous functions on time scales, , along with -metric, , which is defined byfor all and In addition, since
,
is defined as
for all
and
, which is the same as the Hausdorff metric on the fuzzy continuous functions space.
In addition, we consider
for all
and
and
is defined as
Here,
mapping is a new generalization of the Bielecki’s metric in [
21]. The following two lemmas describe some important properties of
and
Lemma 6. If is constant, then: is a metric and is equivalent to the sup-metric ,
is a complete metric space.
Proof. We note that
as any constant function is always
-continuous. Since
, we have
for all
. Hence,
(set of positively regressive functions) and
for all
(see [
2]). It follows that, for each
we have
since
,
thus
.
if and only if
, and we know that
if and only if
. Since D is a metric,
. In addition, we have
We know that if
, then
is right-increasing. Thus, we have
It follows that
Now, we show that
is a complete metric space. To this end, we show that every Cauchy sequence in
converges to a function in
. Let
be a Cauchy sequence in
. This means that, for every
, there is a positive integer
such that
Thus, according to 1.,
and
is a complete metric space (see [
14]). Thus, there exists a
such that
and, as a result of
we have
. Hence, a Cauchy sequence
in
is convergent and the limit is a fuzzy continuous function on
. Thus,
is a complete metric space.
☐
Now, we show has some properties similar to the properties of a norm in the usual crisp sense without being a norm. It is not a norm because is not a vector space (see part (ii) of Theorem 1) and, consequently, with is not a normed space.
Lemma 7. The map has the the following properties: if and only if ,
for all and ,
for all .
5. Results
Before starting the main discussion, we give a definition which is necessary.
Definition 16. Let be a time scale. A function is called Consider the following fuzzy dynamic equations
and
where
.
Lemma 8. For , the fuzzy dynamic equation , , where is -continuous, is equivalent to one of the following fuzzy integral equationson interval , depending on the considered in Definition 12, or , respectively. Proof. Let us suppose that
is a solution of the fuzzy dynamic equation
,
. Then, by integration, we get
Thus,
where, in both cases, we have a solution
of the
-integral equation.
In fact, a solution to the fuzzy integral Equation (
14) is a continuous function satisfying the conditions in Equation (
14). Now, if
is a solution to one of the
-integral Equation (
14), we can write
and
or
and
Therefore, if
t is a right-scattered point
Since
, it follows that
and, if
t is a right-dense point
, we have (in the metric D)
and we observe that
Since
f is continuous at
t (t is right-dense), it follows for each
that there exists a neighborhood
such that, for each
. Hence, by taking the limit as
, we have
Similarly, the left fuzzy delta derivative of f in t is . This means that is a solution to the fuzzy dynamic equation . ☐
Considering the proof of Lemma 8, it is deduced that from the first expression in the Equation (
14) that we have a
differentiable solution, and, from the second expression in the Equation (
14), we have a
-differentiable solution.
Lemma 9. For , the fuzzy dynamic equation , , where is -continuous, is equivalent to one of the following integral equationson interval . Proof. It is similar to the proof of Lemma 8. ☐
Now, in the following theorem, we prove that the problem (
12) has two unique solutions.
Theorem 7. Let be rd-continuous. If there exists a positive constant L such thatthen the dynamic Equation (12) has two solutions (one differentiable as and the other one differentiable as ), , such that . Proof. Let
be the constant defined in the Lipschitz condition (
16). Define
where
is an arbitrary constant. Consider the complete metric space
. Let
Note that Equation (
17) is well defined, as
f is
-continuous. Since
f is
-continuous on
, according to Theorem 7 in [
10], we have
for every
. Furthermore,
. Hence,
Now, we prove that there exists a unique, continuous function
x such that
i.e., the fixed point of
P will be the solution to the fuzzy dynamic Equation (
12). In this regard, it is sufficient to show that
P is a contractive map with contraction constant
. Let
. Using the metric
in (
10), we note that
here, we used the Lipschitz condition (
16) in the last step. We can rewrite the above inequality as
Again, using Definition 15 and employing
with
, we obtain
where
. Thus,
P satisfies Equation (
12), and it is a contractive map. Therefore, using Banach’s fixed point theorem, there exists a unique fixed point
x of
P in
.
Similarly, it can be proved that is a contractive map. ☐
As can be seen, this metric is incredibly interesting in the sense that it necessitates the operator involved to be contractive on the whole of rather than on the smaller set.
Example 1. Consider the fuzzy dynamic initial value problemwhere is -continuous on , since t is -continuous. Therefore, the composition function will be -continuous, according to Definition 16 for all . Hence, f is - continuous on . In addition, f is Lipschitz continuous on . We note that, for all , we havewhere . Therefore, f satisfies a Lipschitz condition in the second argument on with Lipschitz constant . Thus, the fuzzy dynamic equation IVP has a unique solution, x, such that . Example 2. Consider Equation (1) asIn this equation, according to properties of metric D, we have Thus, right side function (19) satisfies a Lipschitz condition with Lipschitz constant . Hence, the fuzzy dynamic Equation (19) has a unique solution. The next theorem concerns the existence and uniqueness of solutions to the fuzzy dynamic Equation (
13) using Banach’s fixed-point theorem. However, in the following theorem, a modified Lipschitz condition for
f is defined that guarantees a unique solution to the fuzzy dynamic Equation (
13).
Theorem 8. Let be -continuous. If there exists a positive constant L such thatthen the dynamic Equation (13) has two solutions (one differentiable as and the other one differentiable as ), , such that . Proof. Consider the complete metric space
. Let
be the constant defined in the Lipschitz condition (
20) such that
, where
is an arbitrary constant. Define, for all
Note that the right side of Equation (
21) is well defined, as the function
f is
-continuous. In addition, since
f is
-continuous, according to Theorem 7 from [
10], we have that
for all
. Furthermore,
. Hence,
Thus, according to Lemma 9, the fixed points of
P will be solutions to the fuzzy dynamic Equation (
13). We prove that there exists a unique, continuous function
x such that
. To do this, we show that
P is a contractive map with contraction constant
. Thus, Banach’s Theorem will guarantee the existence and uniqueness of the solution of the fuzzy dynamic equations.
Let
. From the definition of
, we have
where we used Lipschitz condition (
20) in the last step. Moreover, we note that from the property of exponential function, we have
,
Using property (
22) and assumption
, we obtain
where we used definition
and
in the last step. Then, we get
where
. Thus,
P is a contractive map. Therefore, Banach’s fixed-point theorem implies that there exists a unique solution
for dynamic Equation (
13). Similarly, it can be proved that
is a contractive map. This completes the proof. ☐
Example 3. Consider the following fuzzy dynamic equationthe function in the Equation (23) satisfies the Lipschitz condition (20) with since Therefore, Equation (23) has a unique solution in 6. Conclusions
In this paper, we introduced the fuzzy dynamic equations on time scales and defined a new metric. In addition, we proved the existence and uniqueness of solutions to first order fuzzy dynamic equations on time scales. In the near future, we would like to expand it for the second order fuzzy dynamic equations.


{kind=link}
