
A New Charging Algorithm for Li-Ion Battery Packs Based on Artificial Neural Networks

 , , , and
, , , and
Abstract
:1. Introduction
2. Background
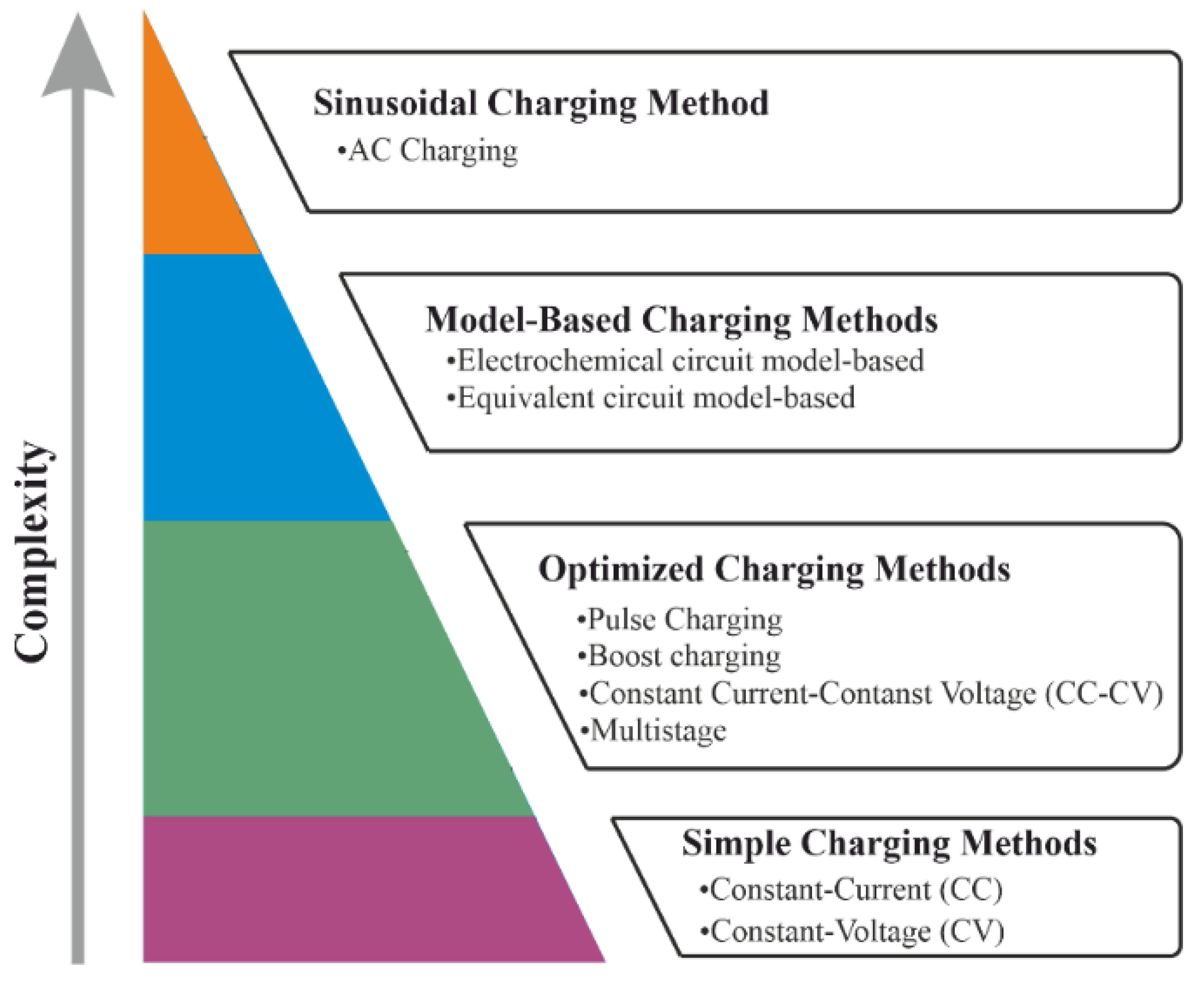
2.1. Charging Methods
2.2. Balancing Methodologies
3. Proposed Approach
3.1. Artificial Neural Networks
3.2. Training Approach
4. System Description and Experimental Results
4.1. System Description
- Stage 1. In this stage, all the system variables are initialized, and all the communication ports are configured. Additionally, the number of ISL94212 devices connected in the chain is checked and the initial voltages and temperatures of each battery pack is acquired.
- Stage 2. The stop criteria, represented by Equations (10) and (11), is checked to verify if the battery packs are in charging condition or already fully charged.
- Stage 3. In this stage, the input data of the FFNNs is obtained. To accomplish this, the voltages and temperatures of each battery pack connected in the chain are acquired. When the acquisition process is complete, the data is passed through a moving average filter with the last six measured data points to reduce noise.
- Stage 4. In this stage, the FFNN1 is executed, and the calculated charging current is communicated to the power unit through the SCPI.
- Stage 5. Finally, FFNN2 is executed and then the output response value is evaluated in a comparison stage that normalizes the orders to binary values (0 or 1). Afterwards, the balancing orders are performed using the acquisition and balancing unit. The system then waits 60 s for the balancing process to finish in order to not compromise the accuracy of the next measurement process.
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Khan, A.B.; Choi, W. Optimal Charge Pattern for the High-Performance Multistage Constant Current Charge Method for the Li-Ion Batteries. IEEE Trans. Energy Convers. 2018, 33, 1132–1140. [Google Scholar] [CrossRef]
- Wu, T.; Liu, X.; Zhang, X.; Lu, Y.; Wang, B.; Deng, Q.; Yang, Y.; Wang, E.; Lyu, Z.; Li, Y.; et al. Full Concentration Gradient-Tailored Li-Rich Layered Oxides for High-Energy Lithium-Ion Batteries. Adv. Mater. 2021, 33, 2001358. [Google Scholar] [CrossRef] [PubMed]
- El Kharbachi, A.; Zavorotynska, O.; Latroche, M.; Cuevas, F.; Yartys, V.; Fichtner, M. Exploits, Advances and Challenges Benefiting beyond Li-Ion Battery Technologies. J. Alloys Compd. 2020, 817, 153261. [Google Scholar] [CrossRef]
- Li, S.; Leng, D.; Li, W.; Qie, L.; Dong, Z.; Cheng, Z.; Fan, Z. Recent Progress in Developing Li2S Cathodes for Li–S Batteries. Energy Storage Mater. 2020, 27, 279–296. [Google Scholar] [CrossRef]
- Su, Y.S.; Fu, Y.; Cochell, T.; Manthiram, A. A Strategic Approach to Recharging Lithium-Sulphur Batteries for Long Cycle Life. Nat. Commun. 2013, 4, 2985. [Google Scholar] [CrossRef]
- Ren, D.; Feng, X.; Lu, L.; He, X.; Ouyang, M. Overcharge Behaviors and Failure Mechanism of Lithium-Ion Batteries under Different Test Conditions. Appl. Energy 2019, 250, 323–332. [Google Scholar] [CrossRef]
- Mandli, A.R.; Ramachandran, S.; Khandelwal, A.; Kim, K.Y.; Hariharan, K.S. Fast Computational Framework for Optimal Life Management of Lithium Ion Batteries. Int. J. Energy Res. 2018, 42, 1973–1982. [Google Scholar] [CrossRef]
- Rodrigues, M.T.F.; Son, S.-B.; Colclasure, A.M.; Shkrob, I.A.; Trask, S.E.; Bloom, I.D.; Abraham, D.P. How Fast Can a Li-Ion Battery Be Charged? Determination of Limiting Fast Charging Conditions. ACS Appl. Energy Mater. 2021, 4, 1063–1068. [Google Scholar] [CrossRef]
- Liu, K.; Zou, C.; Li, K.; Wik, T. Charging Pattern Optimization for Lithium-Ion Batteries With an Electrothermal-Aging Model. IEEE Trans. Ind. Inform. 2018, 14, 5463–5474. [Google Scholar] [CrossRef]
- Lin, Q.; Wang, J.; Xiong, R.; Shen, W.; He, H. Towards a Smarter Battery Management System: A Critical Review on Optimal Charging Methods of Lithium Ion Batteries. Energy 2019, 183, 220–234. [Google Scholar] [CrossRef]
- Wang, S.C.; Liu, Y.H. A PSO-Based Fuzzy-Controlled Searching for the Optimal Charge Pattern of Li-Ion Batteries. IEEE Trans. Ind. Electron. 2015, 62, 2983–2993. [Google Scholar] [CrossRef]
- Faisal, M.; Hannan, M.A.; Ker, P.J.; Rahman, M.S.A.; Begum, R.A.; Mahlia, T.M.I. Particle Swarm Optimised Fuzzy Controller for Charging–Discharging and Scheduling of Battery Energy Storage System in MG Applications. Energy Rep. 2020, 6, 215–228. [Google Scholar] [CrossRef]
- Kalogiannis, T.; Hosen, M.S.; Gandoman, F.H.; Sokkeh, M.A.; Jaguemont, J.; Berecibar, M.; van Mierlo, J. Multi-Objective Particle Swarm Optimization and Training of Datasheet-Based Load Dependent Lithium-Ion Voltage Models. Int. J. Electr. Power Energy Syst. 2021, 133, 107312. [Google Scholar] [CrossRef]
- Chen, L.R.; Hsu, R.C.; Liu, C.S. A Design of a Grey-Predicted Li-Ion Battery Charge System. IEEE Trans. Ind. Electron. 2008, 55, 3692–3701. [Google Scholar] [CrossRef]
- Chen, L.-R.; Hsu, R.C.; Liu, C.S.; Yang, H.-Y.; Chu, N.-Y. A Grey-Predicted Li-Ion Battery Charge System. In Proceedings of the 30th Annual Conferenceof the IEEE industrlal Electronics Society, Busan, South Korea, 2–6 November 2004; pp. 502–507. [Google Scholar]
- Li, C.Y.; Liu, G.P. Optimal Fuzzy Power Control and Management of Fuel Cell/Battery Hybrid Vehicles. J. Power Sources 2009, 192, 525–533. [Google Scholar] [CrossRef]
- Mansiri, K.; Sukchai, S.; Sirisamphanwong, C. Fuzzy Control Algorithm for Battery Storage and Demand Side Power Management for Economic Operation of the Smart Grid System at Naresuan University, Thailand. IEEE Access 2018, 6, 32440–32449. [Google Scholar] [CrossRef]
- Faisal, M.; Hannan, M.A.; Ker, P.J.; Lipu, M.S.H.; Uddin, M.N. Fuzzy-Based Charging—Discharging Controller for Lithium-Ion Battery in Microgrid Applications. IEEE Trans. Ind. Appl. 2021, 57, 4187–4195. [Google Scholar] [CrossRef]
- Liu, Y.-H.; Teng, J.-H.; Lin, Y.-C. Search for an Optimal Rapid Charging Pattern for Lithium–Ion Batteries Using Ant Colony System Algorithm. IEEE Trans. Ind. Electron. 2005, 52, 1328–1336. [Google Scholar] [CrossRef]
- Guo, Z.; Liaw, B.Y.; Qiu, X.; Gao, L.; Zhang, C. Optimal Charging Method for Lithium Ion Batteries Using a Universal Voltage Protocol Accommodating Aging. J. Power Sources 2015, 274, 957–964. [Google Scholar] [CrossRef]
- Lee, C.; Chang, T.; Hsu, S.; Jiang, J. Taguchi-Based PSO for Searching an Optimal Four-Stage Charge Pattern of Li-Ion Batteries. J. Energy Storage 2019, 21, 301–309. [Google Scholar] [CrossRef]
- Amanor-boadu, J.M.; Guiseppi-Elie, A.; Sánchez-Sinencio, E. Search for Optimal Pulse Charging Parameters for Li-Ion Polymer Batteries Using Taguchi Orthogonal Arrays. IEEE Trans. Ind. Electron. 2018, 65, 8982–8992. [Google Scholar] [CrossRef]
- Perez, H.E.; Hu, X.; Dey, S.; Moura, S.J. Optimal Charging of Li-Ion Batteries with Coupled Electro-Thermal-Aging Dynamics. IEEE Trans. Veh. Technol. 2017, 66, 7761–7770. [Google Scholar] [CrossRef]
- Zou, C.; Hu, X.; Wei, Z.; Wik, T.; Egardt, B. Electrochemical Estimation and Control for Lithium-Ion Battery Health-Aware Fast Charging. IEEE Trans. Ind. Electron. 2018, 65, 6635–6645. [Google Scholar] [CrossRef]
- Wang, S.; Kuang, K.; Han, X.; Chu, Z.; Lu, L.; Ouyang, M. A Model-Based Continuous Differentiable Current Charging Approach for Electric Vehicles in Direct Current Microgrids. J. Power Sources 2021, 482, 229019. [Google Scholar] [CrossRef]
- Chen, J.C.; Chen, T.L.; Liu, W.J.; Cheng, C.C.; Li, M.G. Combining Empirical Mode Decomposition and Deep Recurrent Neural Networks for Predictive Maintenance of Lithium-Ion Battery. Adv. Eng. Inform. 2021, 50, 101405. [Google Scholar] [CrossRef]
- Yang, Q.; Xu, J.; Li, X.; Xu, D.; Cao, B. State-of-Health Estimation of Lithium-Ion Battery Based on Fractional Impedance Model and Interval Capacity. Int. J. Electr. Power Energy Syst. 2020, 119, 105883. [Google Scholar] [CrossRef]
- Rastegarpanah, A.; Hathaway, J.; Ahmeid, M.; Lambert, S.; Walton, A.; Stolkin, R. A Rapid Neural Network–Based State of Health Estimation Scheme for Screening of End of Life Electric Vehicle Batteries. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2020, 235, 330–346. [Google Scholar] [CrossRef]
- Chandran, V.; Patil, C.K.; Karthick, A.; Ganeshaperumal, D.; Rahim, R.; Ghosh, A. State of Charge Estimation of Lithium-Ion Battery for Electric Vehicles Using Machine Learning Algorithms. World Electr. Veh. J. 2021, 12, 38. [Google Scholar] [CrossRef]
- Ashraf, A.; Bangyal, W.H.; Rauf, H.T.; Pervaiz, S.; Ahmad, J. Training of Artificial Neural Network Using New Initialization Approach of Particle Swarm Optimization for Data Classification. In Proceedings of the 2020 International Conference on Emerging Trends in Smart Technologies (ICETST), Karachi, Pakistan, 26–27 March 2020. [Google Scholar] [CrossRef]
- Hussein, A.A.H.; Batarseh, I. A Review of Charging Algorithms for Nickel and Lithium Battery Chargers. IEEE Trans. Veh. Technol. 2011, 60, 830–838. [Google Scholar] [CrossRef]
- Shen, W.; Vo, T.T.; Kapoor, A. Charging Algorithms of Lithium-Ion Batteries: An Overview. In Proceedings of the 2012 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012; pp. 1567–1572. [Google Scholar] [CrossRef]
- Keil, P.; Jossen, A. Charging Protocols for Lithium-Ion Batteries and Their Impact on Cycle Life—An Experimental Study with Different 18650 High-Power Cells. J. Energy Storage 2016, 6, 125–141. [Google Scholar] [CrossRef]
- Velho, R.; Beirão, M.; Calado, M.D.R.; Pombo, J.; Fermeiro, J.; Mariano, S. Management System for Large Li-Ion Battery Packs with a New Adaptive Multistage Charging Method. Energies 2017, 10, 605. [Google Scholar] [CrossRef]
- Liu, C.L.; Wang, S.C.; Chiang, S.S.; Liu, Y.H.; Ho, C.H. PSO-Based Fuzzy Logic Optimization of Dual Performance Characteristic Indices for Fast Charging of Lithium-Ion Batteries. In Proceedings of the 2013 IEEE 10th International Conference on Power Electronics and Drive Systems (PEDS), Kitakyushu, Japan, 22–25 April 2013; pp. 474–479. [Google Scholar] [CrossRef]
- Mathieu, R.; Briat, O.; Gyan, P.; Vinassa, J.M. Fast Charging for Electric Vehicles Applications: Numerical Optimization of a Multi-Stage Charging Protocol for Lithium-Ion Battery and Impact on Cycle Life. J. Energy Storage 2021, 40, 102756. [Google Scholar] [CrossRef]
- Yin, M.; Cho, J.; Park, D. Pulse-Based Fast Battery IoT Charger Using Dynamic Frequency and Duty Control Techniques Based on Multi-Sensing of Polarization Curve. Energies 2016, 9, 209. [Google Scholar] [CrossRef]
- Chen, L.-R. A Design of an Optimal Battery Pulse Charge System by Frequency-Varied Technique. IEEE Trans. Ind. Electron. 2007, 54, 398–405. [Google Scholar] [CrossRef]
- Chen, L.R. Design of Duty-Varied Voltage Pulse Charger for Improving Li-Ion Battery-Charging Response. IEEE Trans. Ind. Electron. 2009, 56, 480–487. [Google Scholar] [CrossRef]
- Notten, P.H.L.; Op, J.H.G.; Beek, J.R.G. Van Boostcharging Li-Ion Batteries: A Challenging New Charging Concept. J. Power Sources 2005, 145, 89–94. [Google Scholar] [CrossRef]
- Amietszajew, T.; Mcturk, E.; Fleming, J.; Bhagat, R. Understanding the Limits of Rapid Charging Using Instrumented Commercial 18650 High-Energy Li-Ion Cells. Electrochim. Acta 2018, 263, 346–352. [Google Scholar] [CrossRef]
- Liu, J.; Duan, Q.; Chen, H.; Sun, J.; Wang, Q. An Optimal Multistage Charge Strategy for Commercial Lithium Ion Battery. Sustain. Energy Fuels 2018, 2, 1726–1736. [Google Scholar] [CrossRef]
- Santucci, A.; Sorniotti, A.; Lekakou, C. Power Split Strategies for Hybrid Energy Storage Systems for Vehicular Applications. J. Power Sources 2014, 258, 395–407. [Google Scholar] [CrossRef] [Green Version]
- Cho, S.Y.; Lee, I.O.; Baek, J.I.; Moon, G.W. Battery Impedance Analysis Considering DC Component in Sinusoidal Ripple-Current Charging. IEEE Trans. Ind. Electron. 2016, 63, 1561–1573. [Google Scholar] [CrossRef]
- Chen, L.R.; Wu, S.L.; Shieh, D.T.; Chen, T.R. Sinusoidal-Ripple-Current Charging Strategy and Optimal Charging Frequency Study for Li-Ion Batteries. IEEE Trans. Ind. Electron. 2013, 60, 88–97. [Google Scholar] [CrossRef]
- Gallardo-Lozano, J.; Romero-Cadaval, E.; Milanes-Montero, M.I.; Guerrero-Martinez, M.A. Battery Equalization Active Methods. J. Power Sources 2014, 246, 934–949. [Google Scholar] [CrossRef]
- Cao, J.; Schofield, N.; Emadi, A. Battery Balancing Methods: A Comprehensive Review. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 3–8. [Google Scholar] [CrossRef]
- Daowd, M.; Omar, N.; van den Bossche, P.; van Mierlo, J. A Review of Passive and Active Battery Balancing Based on MATLAB/Simulink. Int. Rev. Electr. Eng. 2011, 6, 2974–2989. [Google Scholar] [CrossRef]
- Qi, J.; Dah-Chuan Lu, D. Review of Battery Cell Balancing Techniques. In Proceedings of the 2014 Australasian Universities Power Engineering Conference (AUPEC), Perth, Australia, 28 September–1 October 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Raman, S.R.; Xue, X.D.; Cheng, K.W.E. Review of Charge Equalization Schemes for Li-Ion Battery and Super-Capacitor Energy Storage Systems. In Proceedings of the 2014 International Conference on Advances in Electronics, Computers and Communications, Bangalore, India, 10–11 October 2014. [Google Scholar]
- Kim, M.-Y.; Kim, C.-H.; Kim, J.-H.; Moon, G.-W. A Chain Structure of Switched Capacitor for Improved Cell Balancing Speed of Lithium-Ion Batteries. IEEE Trans. Ind. Electron. 2014, 61, 3989–3999. [Google Scholar] [CrossRef]
- Ye, Y.; Cheng, K. An Automatic Switched-Capacitor Cell Balancing Circuit for Series-Connected Battery Strings. Energies 2016, 9, 138. [Google Scholar] [CrossRef] [Green Version]
- Ho, K.C.; Liu, Y.H.; Ye, S.P.; Chen, G.J.; Cheng, Y.S. Mathematical Modeling and Performance Evaluation of Switched-Capacitor-Based Battery Equalization Systems. Electronics 2021, 10, 2629. [Google Scholar] [CrossRef]
- Ye, Y.; Cheng, K.W.E. Modeling and Analysis of Series-Parallel Switched-Capacitor Voltage Equalizer for Battery/Supercapacitor Strings. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 977–983. [Google Scholar] [CrossRef]
- Xu, B.; Liu, L.; Wang, S.; Lin, Z.; Mai, R. A Series-Parallel Resonance-Switched-Capacitor Equalizer for the Hybrid Energy Storage System Based on Cascade Utilization. In Proceedings of the 2021 IEEE 2nd China International Youth Conference on Electrical Engineering (CIYCEE), Chengdu, China, 15–17 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, R. An Improved Buck-Boost Circuit Equalization Method for Series Connected Battery Packs. In Proceedings of the 2021 IEEE 4th International Electrical and Energy Conference (CIEEC), Wuhan, China, 28–30 May 2021. [Google Scholar] [CrossRef]
- Wu, Q.; Gao, M.; Lin, H.; Dong, Z. A Bimodal Multichannel Battery Pack Equalizer Based on a Quasi-Resonant Two-Transistor Forward Converter. Energies 2021, 14, 1112. [Google Scholar] [CrossRef]
- Tang, S.; Yang, Y. Why Neural Networks Apply to Scientific Computing? Theor. Appl. Mech. Lett. 2021, 11, 100242. [Google Scholar] [CrossRef]
- SAMSUNG. Specification of Product for Lithium-Ion Rechargeable Cell-Model: ICR18650-26H; Samsung SDI Co., Ltd.: Yongin-si, Korea, 2011. [Google Scholar]
- Nunes, H.G.G.; Pombo, J.A.N.; Bento, P.M.R.; Mariano, S.J.P.S.; Calado, M.R.A. Collaborative Swarm Intelligence to Estimate PV Parameters. Energy Convers. Manag. 2019, 185, 866–890. [Google Scholar] [CrossRef]
- Nguyen, D.; Widrow, B. Improving the Learning Speed of 2-Layer Neural Networks by Choosing Initial Values of the Adaptive Weights. In Proceedings of the 1990 IJCNN International Joint Conference on Neural Networks, San Diego, CA, USA, 17–21 June 1990. [Google Scholar]
- Ruan, D.; Montero, J.; Lu, J.; Martinez, L.; D’hondt, P.; Kerre, E.E. Computational Intelligence in Decision and Control. In Proceedings of the 8th International FLINS Conference, Madrid, Spain, 21–24 September 2008; Volume 21, p. 24. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Charging Time (h) | Difference Between Cell Voltages (V) | Temperature Increase (°C) | |
|---|---|---|---|
| Multistage with five current levels | 2.42 | 0.01 | 13.84 |
| Proposed charging Algorithm | 2.23 | 0.01 | 9.28 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Faria, J.P.D.; Velho, R.L.; Calado, M.R.A.; Pombo, J.A.N.; Fermeiro, J.B.L.; Mariano, S.J.P.S. A New Charging Algorithm for Li-Ion Battery Packs Based on Artificial Neural Networks. Batteries 2022, 8, 18. https://doi.org/10.3390/batteries8020018
Faria JPD, Velho RL, Calado MRA, Pombo JAN, Fermeiro JBL, Mariano SJPS. A New Charging Algorithm for Li-Ion Battery Packs Based on Artificial Neural Networks. Batteries. 2022; 8(2):18. https://doi.org/10.3390/batteries8020018
Chicago/Turabian StyleFaria, João P. D., Ricardo L. Velho, Maria R. A. Calado, José A. N. Pombo, João B. L. Fermeiro, and Sílvio J. P. S. Mariano. 2022. "A New Charging Algorithm for Li-Ion Battery Packs Based on Artificial Neural Networks" Batteries 8, no. 2: 18. https://doi.org/10.3390/batteries8020018