1. Introduction
Wireless sensor networks (WSN) are part of a growing technology that has been designed to support а wide range of applications in wireless environments [
1,
2]. Although sensor networks have been used in various different applications, environmental monitoring is а domain in which they have had а huge impact. Recent climate change-related catastrophes have illustrated the importance of a detailed understanding of the environment and its evolution for the wellbeing of human beings. The capacity of researchers to improve this knowledge is mainly limited by current data collection techniques, which are based on very expensive stations [
3]. The recent development and research in wireless technologies and the advancements in wireless network services have made wireless communications a pervasive means for monitoring the natural environment. WSN’s are particularly useful in remote or dangerous environments whose behaviors have rarely been studied due to their inaccessibility. Therefore, environmental monitoring is an important area for applying wireless sensor networks [
4].
In our study we are using WSN Smart Grid for such harsh environments in Middle East region where the sun is present for at least 12 h per day which makes the climate very dry and hot. One of the biggest problems in the Middle East is the limitation of water resources. We need to measure the soil moisture regularly and very accurately to allow targeted irrigation techniques to be implemented. We are deploying WSN to detect when and where it is raining so that necessary irrigation control measures can be applied.
Many research efforts have tried to deploy WSNs for such environments. But there are many issues with their solutions [
3]. Hence in attempting to deploy a WSN successfully in these type of harsh environments and to ensure proper operation of sensor networks we need to resolve following issues.
In order to deal with the harsh environment, it is necessary to build a system which has two main proprieties, i.e., event-driven and robustness. The sensor network should be reactive so that it can detect different events correctly, for example, the presence and the absence of rainfall and hence the changes in degree of moisture in the soil. After the event is detected, the affected nodes need to sample the environment at a much faster rate for example if the system is set to sample after every few minutes when it is not raining then it should sample at few seconds when it is raining. Hence the available bandwidth should be more at nodes affected by rain. Hence the required information is sent across as fast as possible and also accurately to the monitoring center or base station.
Currently there is no such robust and event-based wireless routing protocol to react to such type of outdoor environments. Resource limitations of the sensor nodes and unreliability of low-power wireless links [
5], in combination with various performance demands of different applications, impose many challenges in designing efficient communication protocols for wireless sensor networks [
6].
In this paper, we discuss the shortcomings of popular routing protocols for our application and we exploit the advantages of the popular routing protocol “Ad hoc On-Demand Multipath Distance Vector” (AOMDV) and modify it to achieve the objectives. To achieve the robustness of wireless sensor network (WSN) this project will enhance the protocol to be an energy aware routing protocol to expand the life time of the nodes. We also discuss in detail the design of a smart grid network that can provide all necessary physical parameters to be used in soil moisture and rainfall monitoring algorithms. We implement an algorithm for monitoring and controlling soil moisture events and evaluate the network based on power used, throughput, etc. We deploy an outdoor WSN testbed for testing our algorithm. The rest of the paper is outlined as follows:
Section 2 provides a literature review,
Section 3 explores a solution approach.
Section 4 looks at sensor network design and in
Section 5 we provide testbed results and performance. Finally, we conclude in
Section 6.
2. Literature Review
There are numerous routing protocols proposed by researchers in this area, to improve performance demands of different applications through the network layer of wireless sensor networks protocol stack [
7,
8]. Most of the existing routing protocols in wireless sensor networks are designed based on the single-path routing strategy without considering the effects of various traffic load intensities [
9,
10]. In this approach, each source node selects а single path which can satisfy performance requirements of the intended applications for transmitting its traffic towards the sink node.
Although route discovery through single-path routing approach can be performed with minimum computational complexity and resource utilization, the limited capacity of а single path significantly reduces the achievable network throughput [
11,
12]. Furthermore, the low flexibility of this approach against node or link failures may significantly reduce the network performance in critical situations. For instance, whenever the active path fails to transmit data packets (as а result of limited power supply of the sensor nodes, high dynamics of wireless links and physical damages), finding an alternative path to continue data transmission process may cause extra overhead and delay in data delivery. Therefore, due to the resource constraints of sensor nodes and the unreliability of wireless links, single-path routing approaches cannot be considered effective to meet the performance demands of various applications. In order to cope with the limitations of single-path routing techniques, another type of routing strategy, known as multipath routing, has become а promising technique in wireless sensor and ad hoc networks. Dense deployment of the sensor nodes enables а multipath routing approach to construct several paths from individual sensor nodes towards the destination [
13].
Discovered paths can be utilized concurrently to provide adequate network resources in intensive traffic conditions. Alternatively, each source node can use only one path for data transmission and switch to another path upon node or link failures. The latter one is mainly used for fault-tolerance purposes, and this is known as alternative path routing.
In the past decade, the multipath routing approach has been widely utilized for different network management purposes such as improving data transmission reliability, providing fault-tolerance routing, congestion control and Quality of Service (QoS) support in traditional wired and wireless networks.
However, the unique features of wireless sensor networks (e.g., constrained power supply, limited computational capability, and low-memory capacity) and the characteristics of short-range radio communications (e.g., fading and interference [
14,
15]) introduce new challenges that should be addressed in the design of multipath routing protocols. Accordingly, existing multipath routing protocols for traditional wireless networks (such as ad hoc networks) cannot be used directly in low-power sensor networks. During the past years, this issue has motivated the research community of wireless sensor networks to develop multipath routing protocols which are suitable for sensor networks.
In [
7], routing challenges and design issues in wireless sensor networks were discussed. They classified all the existing routing strategies based on the network structure and protocol operation. In [
16] the researchers provided а brief overview on the existing fault-tolerant routing protocols in wireless sensor networks and categorized these protocols into retransmission-based and replication-based protocols. The researchers in [
17] and [
18], classified the existing multipath routing protocols in ad hoc networks based on the primary criterion used in their design.
Many routing protocols have been proposed for Wireless Sensor and Ad Hoc Networks. Since we are interested in dynamic and event driven protocol so we studied the likes of AODV which is a reactive protocol that discovers routes only on the basis of demand using a route discovery mechanism. It uses traditional routing tables with one entry per destination. The main advantage of AODV [
9,
10] compared to other routing protocols is that less memory space is required as information of only active routes are maintained, in turn increasing the performance. While on the other side, the disadvantage is; this protocol is not scalable and in large networks it does not perform well and is not capable to support asymmetric links.
Ad-hoc On-demand Multipath Distance Vector Routing (AOMDV) [
19] protocol is an extension to the AODV protocol for computing multiple loop-free and link disjoint paths [
20] which aims to remove the disadvantages and the limitation of AODV. The main idea in AOMDV is to compute multiple paths during route discovery. It is designed primarily for highly dynamic ad hoc networks where link failures and route breaks occur frequently. When single path on-demand routing protocol such as AODV is used in such networks, a new route discovery is needed in response to every route break. Each route discovery is associated with high-overhead and latency. This inefficiency can be avoided by having multiple redundant paths available. Now, a new route discovery is needed only when all paths to the destination break. AOMDV can also be used to find node-disjoint or link-disjoint routes. But, AOMDV has more message overheads during route discovery due to increased flooding because it is a multipath routing protocol, the destination replies to the multiple RREQs which results in longer overheads.
In [
21], researchers improved the performance of standard AOMDV in conditions like mobility or multi communication. They proposed link reliability in route choice. They modified the Route request process to enable reliable paths using Bit Error Rate (BER). They tested the effectiveness of new protocol by considering these improvements under realistic conditions and the result was compared to standard AOMDV and AODV protocols to show improved performance.
Researchers in [
22] modified AOMDV protocol by proposing a new fuzzy logic based scheme. The proposed protocol was shown to select better paths and increase network survivability. The proposed protocol considered many selection criteria, where some represented network status and others were issued by preventive, reactive and tolerant saving lines. They carried out simulations to compare the modified AOMDV protocol with AODV and AOMDV. They showed the proposed protocol’s survivability under different conditions.
An AOMDV based method (E-AOMDV) was proposed by [
23], to conserve energy, find shortest path and for load balancing. In order to conserve energy, they defined an energy factor as selection criteria, which was defined as product of energy factors of all nodes on different paths. The status of energy was given by Energy factor. They compared the performance of AOMDV and E-AOMDV to show that the lifetime of proposed E-AOMDV protocol was limited but it showed improved routing compared to AOMDV without including energy factor. So they concluded that performance of the proposed method was better in limited lifetime and showed better results with the new E-AOMDV protocol.
In [
24], the authors proposed a modified AOMDV protocol called Network Coding-based AOMDV (NC-AOMDV) routing algorithm for MANET. The proposed method tried to increase data transmission reliability and ensure load balancing. They compared NC-AOMDV routing protocol to AOMDV routing protocol in simulation based on packet overhead, packet delivery ratio, and average end-to-end delay during packet transmission. The results in simulations showed that NC-AOMDV routing protocol was accurate and efficient and provided route stability in dynamic MANET.
An algorithm find maximal nodal remaining energy was proposed in [
25], called Delay Remaining Energy for AOMDV (DRE-AOMDV) routing protocol. It claimed to get a solution for finding maximal nodal remaining energy for all routes in selecting a path for end-to-end requirement. The protocol was specifically for route failures caused by lack of energy. The proposed protocol showed significant network performance improvement in terms of energy consumption, packet delivery and network lifetime.
An extension to AOMDV routing protocol was proposed by [
26]. It was channel adaptive routing protocol to accommodate channel fading. The proposed algorithm was called Channel-Aware AOMDV (CA-AOMDV). It used channel average nonfading duration as routing metric. Using this it selected stable links for path discovery by applying a pre-emptive handoff strategy. By doing this it was able to maintain reliable connections and exploit channel state information to ensure that the paths were reused when available, instead of being discarded. Simulation results were provided for downtime and lifetime multiple path system. The authors also provided theoretical expressions for network performance measures, and evaluated the differences in performance between CA-AOMDV and AOMDV. The Simulation results showed that CA-AOMDV gave better network performance than AOMDV).
A Modified AOMDV (M-AOMDV) Routing Protocol for Maritime Inter-ship Communication [
27] was proposed that provides routing recovery mechanism when a link breaks in an active route to reduce lost packets, this will reduce packet loss ratio and delay time.
M-AOMDV applied to ship communications that are using UHF and VHF, these modifications use the existing AOMDV protocol and enhance the inter-ship communication by adding new recovery methods for a broken link. Normal AOMDV protocol uses one recovery method to recover from broken links; so if a link breaks, this will lead to packet loss and increases the end to end packet delay. In this modification there are two new recovery methods that will try to increase the recovery process and decrease packet loss and end to end delay.
M-AOMDV has better performance results. The delay for the AOMDV protocol is more than M-AOMDV, and the delay of these two protocols are basically consistent with the fluctuating of the speed. The link repair mechanism of M-AOMDV can reduce delays, to a certain extent, by requesting routing entities to forward data packets as soon as possible in order to complete link repair to the destination node when the node detects that the link has been interrupted.
The results show that M-AOMDV reduces average delay and packet loss ratio. Also, this proposed method increases the potential for the ad-hoc network mode to be applied to ship networks on shoreline areas.
Another modified version of AOMDV was proposed in [
28], called ant-AOMDV or ant colony optimization modification for AOMDV in MANET, in this research the writers uses the modified AOMDV for multipath routing using ant colony for mobile ad hoc networks (MANETs). The final result is a comparison between ant-AODV and ant-AOMDV.
The idea behind the working of ant-AODV and ant-AOMDV is that the RREQ message packets are sent to a single path in the case of ant-AODV based routing and to multiple paths in the case of ant-AOMDV based routing. RREQ message packets can be termed as a pheromone in terms of standard algorithm of ACO used by the ants.
Parameters like Quality of Service (QoS) will suffer unless special schemes are developed to sustain such networks because of multi hop routing no default route is available. Each node acts as a router and forwards each other’s packets to enable information sharing between mobile nodes.
Ant Colony optimization falls into a class of biologically inspired algorithms that have recently been developed. The Ant Algorithm mimics the behavior of ants in nature while they are searching for food. Particle swarm optimization is inspired by the behavior of flocks of birds as they fly in search of food. These nature-inspired techniques share a common characteristic, the whole information about the state of the system is contained not in a single entity, but rather some part of the information is stored in many of the entities.
The main idea behind the proposed algorithm is that nodes in the network periodically and asynchronously send out artificial ants towards possible destination nodes of data. These ant agents are small control packets, which have the task to find a path towards their destination and gather information about it. This pheromone takes the form of routing tables maintained locally by all the nodes of the network. They indicate the relative quality of different routes from the current node towards possible destination nodes.
In ant-AOMDV multipath routing is done and it sees all possible routes. So, packets can be sent to all the selected paths and thus helps in load balancing. Routing overhead is also minimized which is shown with the help of parameters Network Routing Load (NRL) and Routing Overhead respectively. The other parameters such as Packet Delivery Fraction (PDF), number of sent packets, number of received packets and number of route request packets sent (RREQ) also shows a vast improvement in ant-AOMDV.
Another researcher [
29] published a paper about AOMDV-PAMAC, they started their paper explaining that power consumption of nodes in ad-hoc networks is a critical issue because they operate on batteries, they suggested a new link layer algorithm knows as Power Aware medium Access Control (PAMAC) protocol is proposed which enables the network layer to select a route with minimum total power requirement among the possible routes between a source and a destination. The first few nodes whose battery power is drained to the set threshold value are pushed to the exterior part of the network and the nodes in the exterior are brought to the interior. So they used AOMDV using PAMAC as the mac layer protocol and the average power consumption.
AOMDV-PAMAC uses the basic ideas of Power Efficient Battery Capacity Routing (PEBCR) and it incorporates these features into the MAC layer as it is essential to minimize the total transmission power consumption. PAMAC protocol is incorporated in the link layer and simulation works are carried out using GloMoSim by considering thirty nodes randomly distributed in an area of 2000 × 2000 m. The AOMDV routing protocol in incorporated in the network layer and its performance is evaluated under CBR traffic with PAMAC as link layer protocol. Multipath routing protocols compute multiple paths during route discovery to avoid high overhead and latency. We observed the performance of AOMDV, which is a multipath routing protocol relative to AODV, and the Link layer protocol PAMAC, which is the modification to the MACA Protocol. When these two protocols are applied simultaneously, good results are produced compared to the other protocol combination.
AOMDV modifications overcomes many limitations of AOMDV but it still has some limitations when used for a real time and robust routing scenario like we have. Thus, we modified AOMDV to suit our purpose and make it more robust, reactive, event driven, and energy aware.
3. Solution Approach
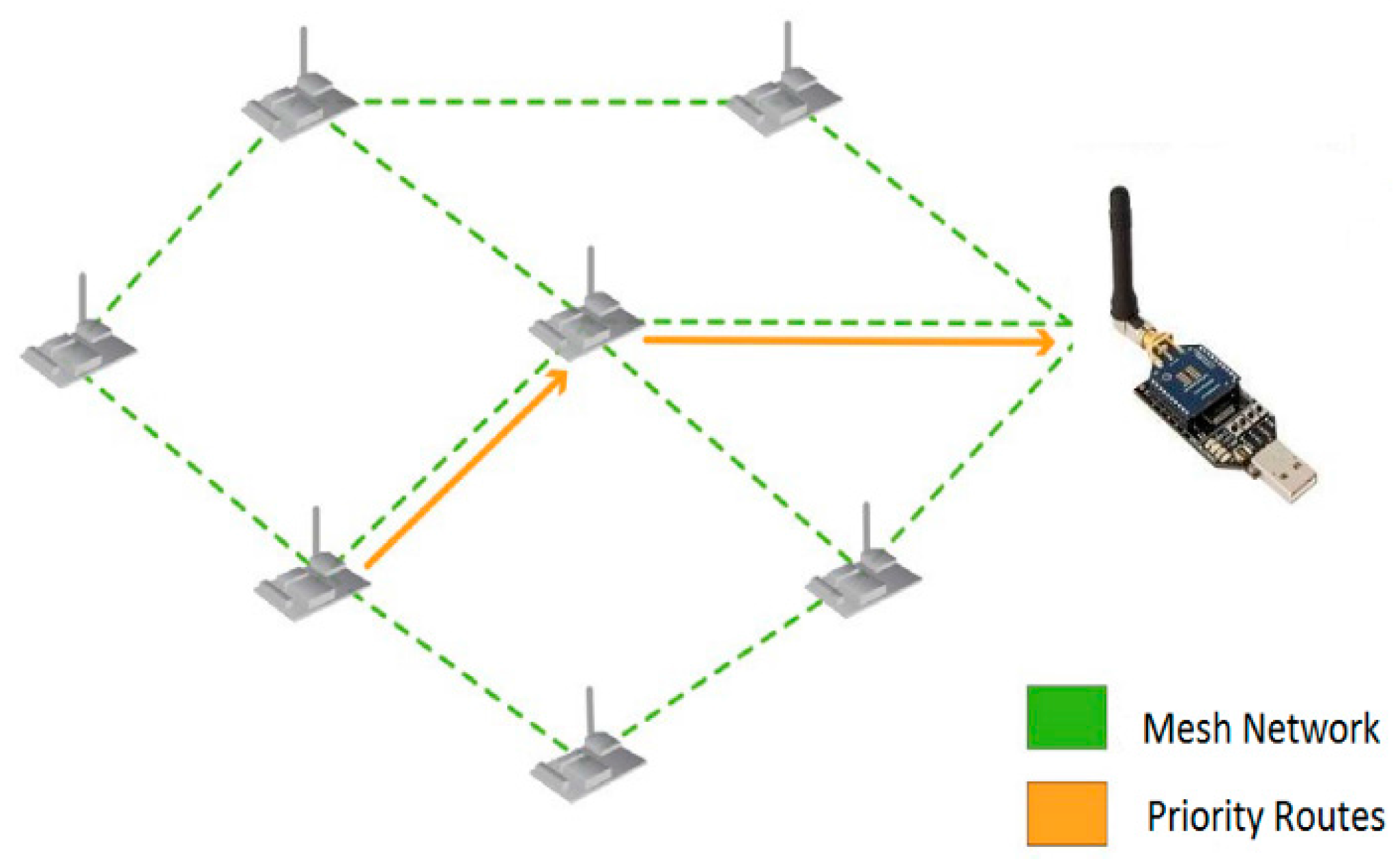
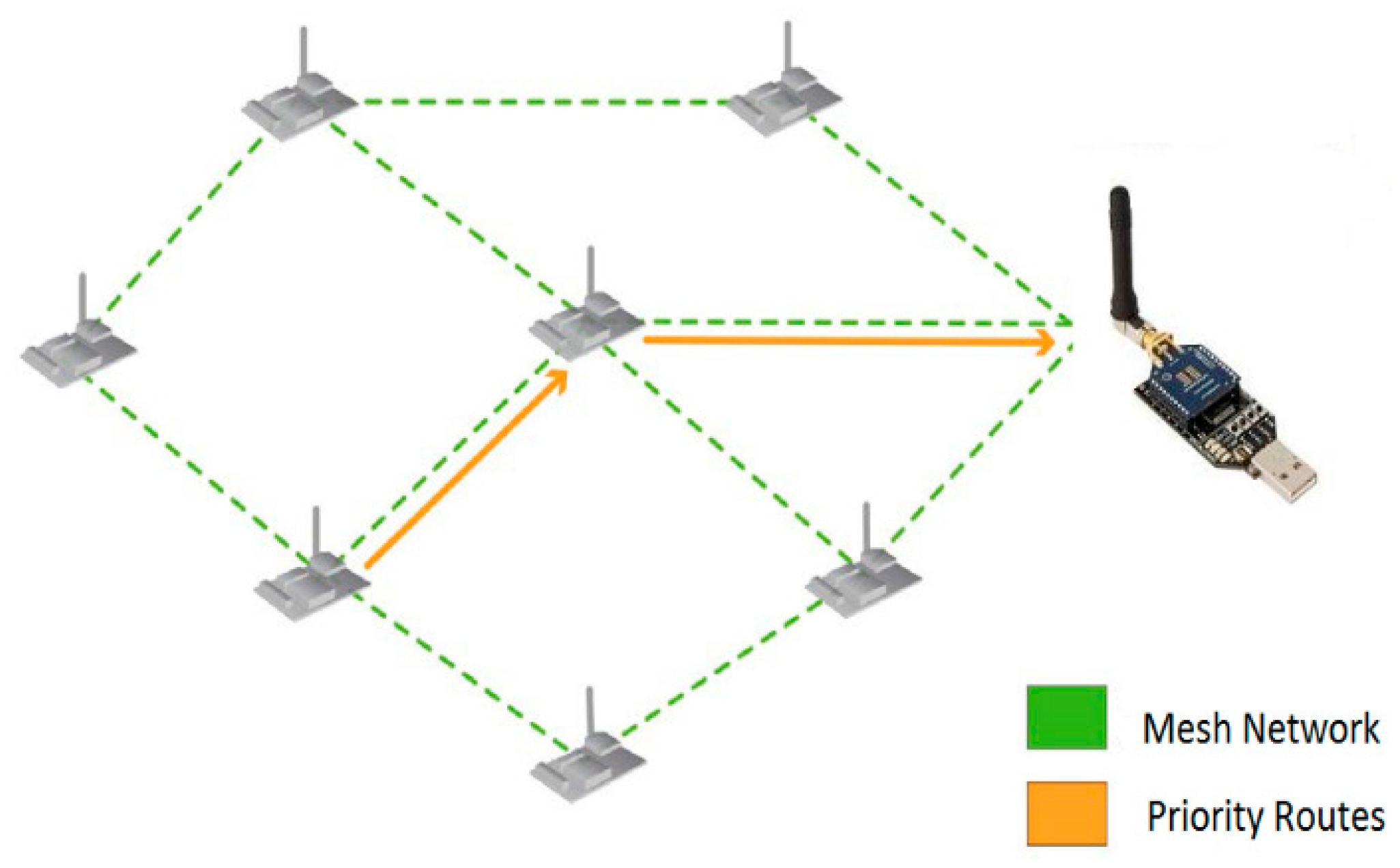
Figure 1 shows the wireless sensor network being deployed over a large geographical area. Each node is able to measure the amount of soil moisture through the soil moisture sensor in the ground as well as detect the presence of rain through the rainfall sensor. The latter is necessary as the amount of soil moisture may not be enough to detect the presence of rain. In addition, the system must quickly react in order to discover over which part of the sensor network is experiencing the event: in this case rain. When rain is detected as falling in a given part of the system, the data is sent from the relevant nodes to a central administrative server or base station through the PC-USB Gateway. We have to change the routing so that information on the change in the soil content in the affected area could be sent to the server as quickly as possible. Hence, this data is routed at a higher priority that other information being sent. Our modified AOMDV protocol works as follows in two schemes. Under the first scheme, the sensor data under normal events (no rainfall) are sampled after every 3 h for 10 s and sent to the server. During these 3 h the sensors are in sleep mode to save energy and after the data is sampled they again go to sleep mode for another 3 h. If we have rainfall event we implement second scheme, in which the data sample is taken after every 1 s for the sensor node experiencing the rainfall event, hence the affected nodes send data after every 1 s, since the soil moisture may change very rapidly. In second scheme we also increase the priority of this affected node to transfer data to the base station through the gateway. All the other sensor nodes where there is no rainfall still keep sampling after every 3 h. In our previous work [
30], we proposed a modified version of the AOMDV protocol. To accommodate these changes dynamically we made changes in the existing AOMDV protocol and proposed a dynamic and robust event driven routing protocol as described below.
Proposed Changes to AOMDV
The plan is therefore to enhance AOMDV to support а dynamic event-driven system as detailed in this paper. The first issue is that the routes may change due to the change in status of the individual nodes, it is necessary to allow HELLO messages, which are used to detect link changes, to not just monitor links but to fully indicate the status of the node at the other side of the link. So in this case, HELLO messages would also indicate whether or not it is raining on the other end, the network load as well as the power left in the system. A key piece of data is whether or not а node is able to route data on behalf of other nodes. As explained before, if а node is at the center of а downpour, its data is probably more important than the data of its neighboring nodes so it should not route data on behalf of other nodes. In such а situation, the node should also not respond to routing request (RREQ) messages, which are used to discover routes to individual destinations. In addition, though HELLO messages will be sent periodically, it is necessary to have another message type which can be sent immediately in response to sudden environmental, link, or node changes. These messages are called STATUS messages and are sent to neighboring nodes. For example, when а node first detects rain, it will send а STATUS message which is picked up by other nodes. By storing this information from various nodes, it would be possible to detect where the rain is falling in the sensor network.
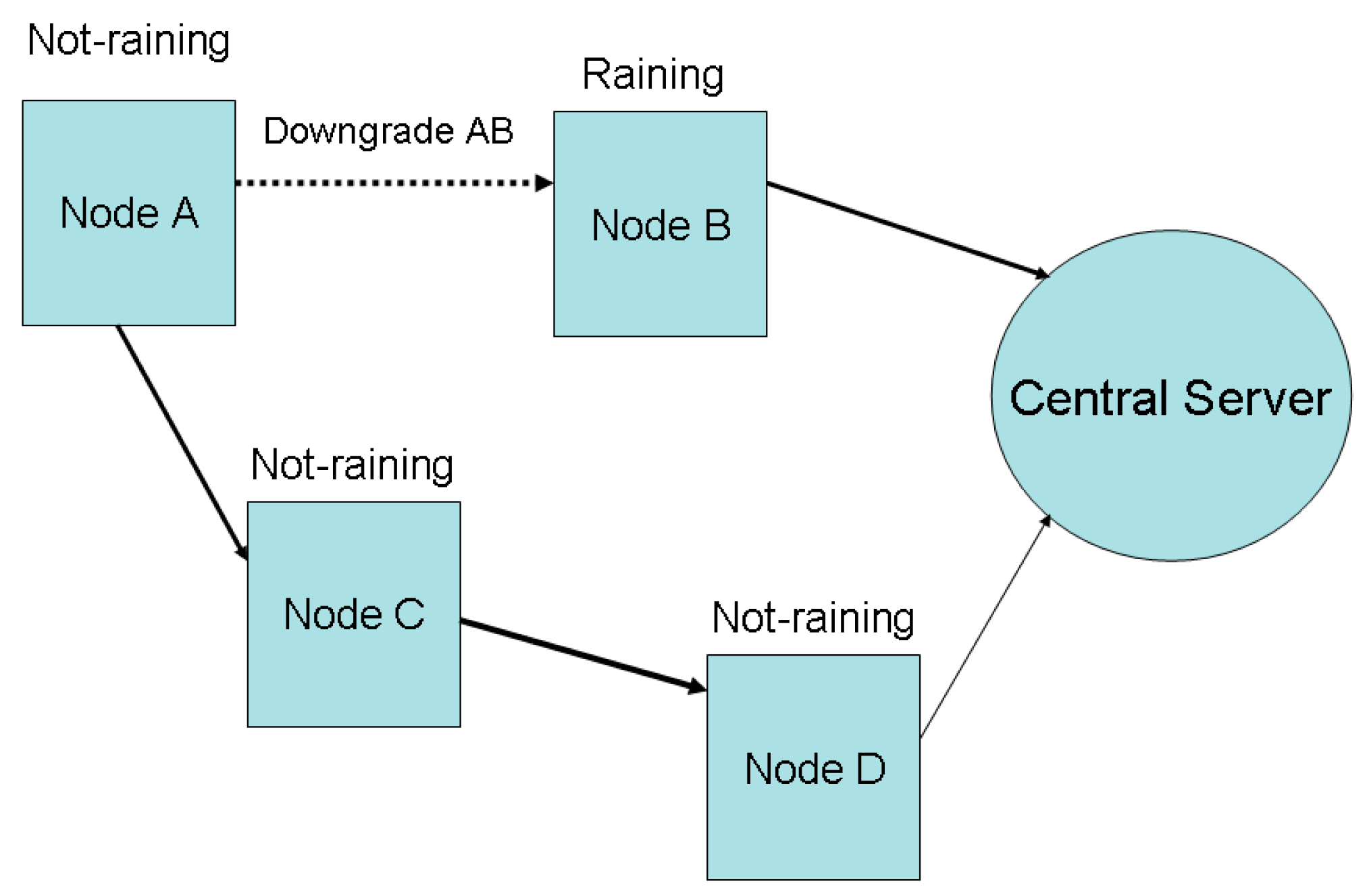
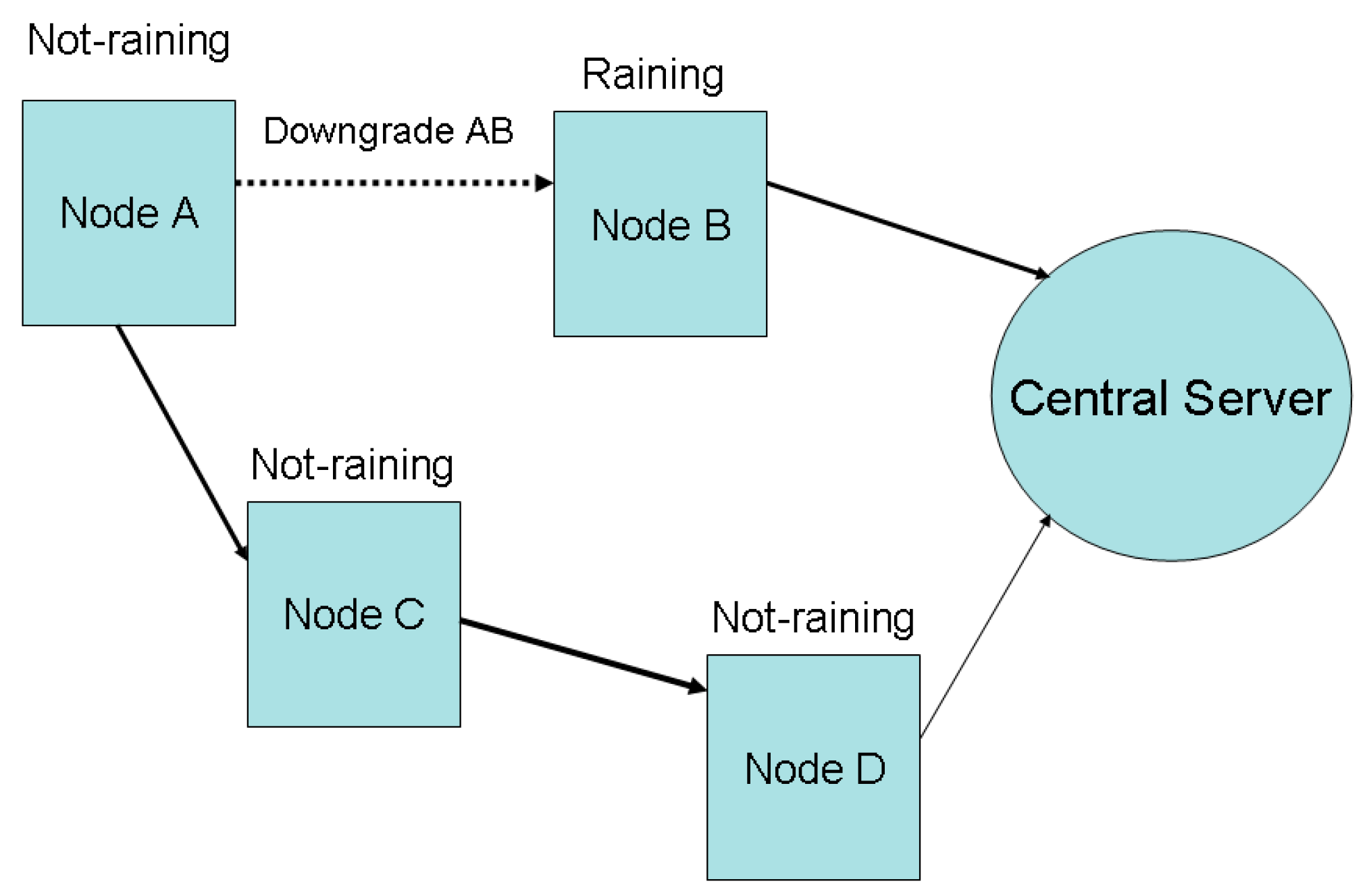
STATUS messages will cause routes to the central server to be re-evaluated. Let us consider the case depicted in
Figure 2. If node A that is not affected by rain was using а route to the central server via node B and node A now receives а STATUS message from node B saying that it has detected rain; then node A, which is not rain-affected, should no longer send data through node B if possible, since, for irrigation purposes, the data being generated by node B is more important.
Node A should look for another route back to the server using other non-affected nodes. This would suggest that routes may have priorities based on the importance of the data being routed relative to the data being generated. In this case, node A will downgrade its route through node B, resulting in other routes through non-affected nodes being favored. This is illustrated in
Figure 2.
If rain is detected by both nodes, A and B, both nodes will send each other their absolute measurements as well as relative changes in the soil moisture content. Nodes with less relative soil moisture content changes which indicate less rain will downgrade routes through regions with high relative soil moisture content changes. So data will be routed away from the most rain-affected areas towards the least rain-affected areas.
C++ language compiler has been used to modify the source code of AOMDV, this modification consists of several enhancements for the current AOMDV protocol. In the following, Algorithm 1, we describes the modification:
| Algorithms 1 |
| if (event == NO_RAIN) |
| begin |
| //use standard AOMDV |
| end |
| else |
| if (event == RAIN) |
| begin |
| sendBrodcastRainPacket(node_id); |
| Disable_hello(); |
| limit_response(); |
| setPacketPriority(1); |
| end |
| else if (event == END_RAIN) |
| begin |
| Enable_Hello(); |
| replyto_response(); |
| setPacketPriority(0); |
| end |
In the above Algorithm 1, when we detect rain we broadcast “node_id”, disable “hello” messages and set packet priority to 1 for the rain affected node.
When a node is affected by rain it will receive a rain event, this event triggers a rain STATUS broadcast message. Every node that is adjacent to this node will receive this packet. The affected nodes will still send HELLO messages but stop responding to RREQ messages, this will prevent the neighboring nodes from seeing it and sending their data through the affected node. Finally, we implemented a simple priority for the packets that are originated from the affected node; all packets that are sent from this node will have a greater value for its QoS value in the IP header.
If the event ends, the node will return to its normal activity, it will send HELLO packets normally and continue to respond on the RREQ packets and finally sets the QoS value to its normal value.
| Algorithms 2 |
| if (packet.type == RAIN_PACKET) |
| begin |
| for each(r in routing_table) |
| begin |
| if (r.nextHop == packet.source) |
| remove(packet.source); |
| end |
| end |
In the above Algorithm 2, when an adjacent node receives a rain packet it will immediately remove all the next hops that this node is involved in. This will prevent any node from sending any data through this node.
5. Testbed and Simulation Results
5.1. WSN Testbed Setup
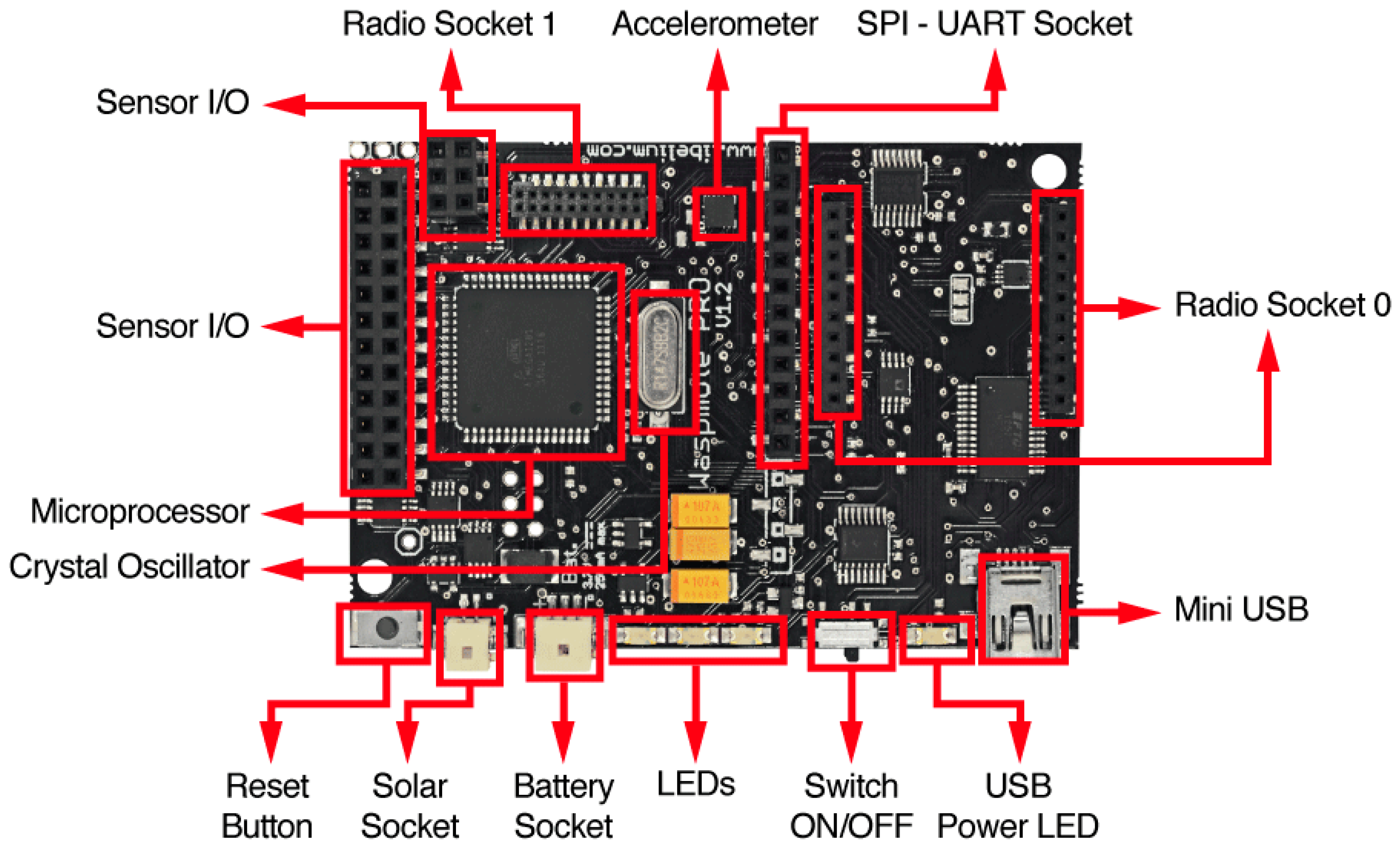
We setup our testbed in a garden in Jordan. The current network deployment has five nodes, which are 5 m apart from each other, but more generally the architecture supports many nodes [
15]. In our protocol, the sensor data are sampled for 10 s after every 3 h, when there is no rainfall. During these 3 h the sensors are in sleep mode to save energy and after the data is sampled they again go to sleep mode for another 3 h. If we have rainfall event, the data is sampled after every 1 s for the sensor node experiencing the rainfall event. That means the affected nodes are up for 10 s and down for one second. In our protocol we also increase the priority of this affected node to transfer data to the base station through the gateway. All the other sensor nodes where there is no rainfall still keep sampling after every 3 h.
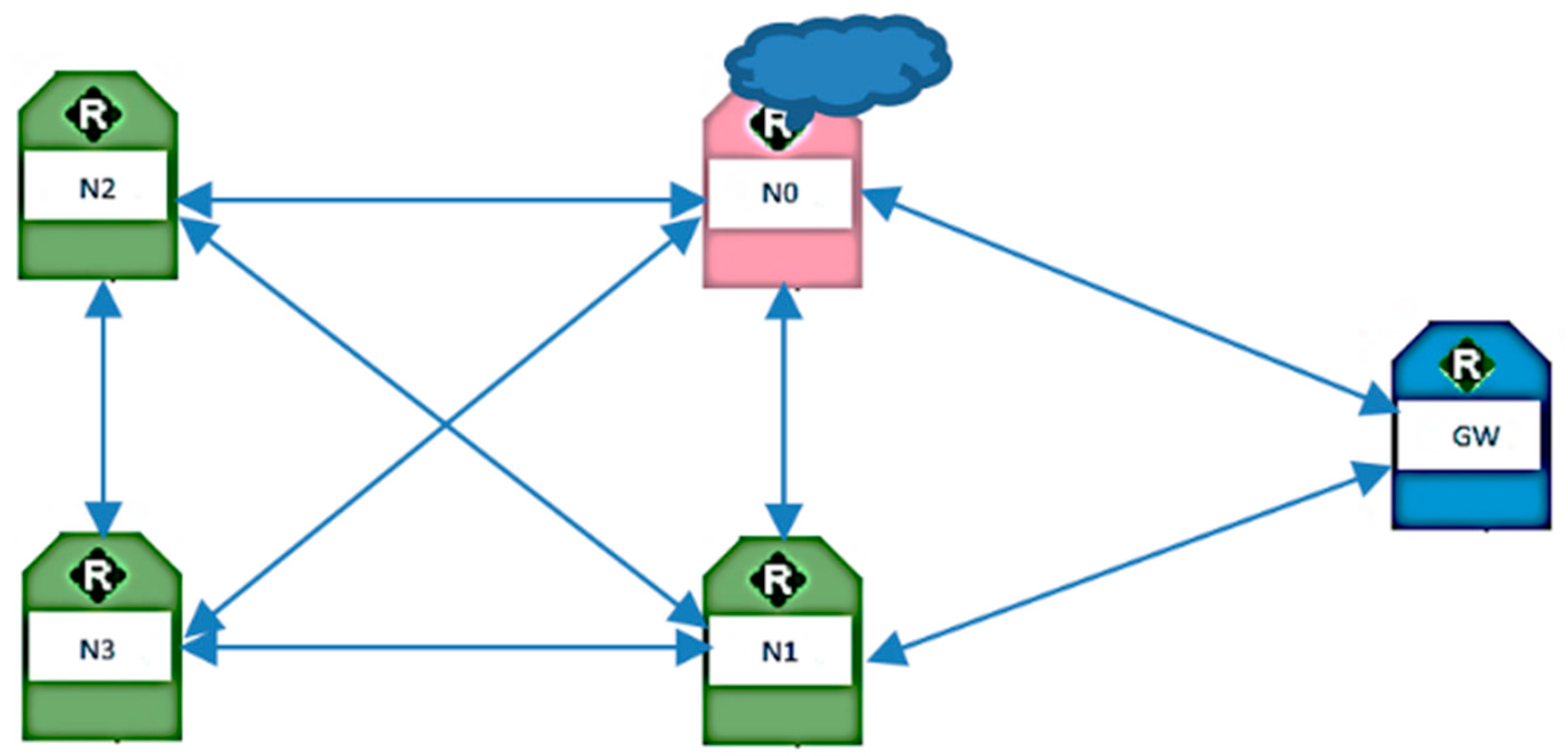
The setup of this scenario consists of 5 wireless nodes from node 0 (N0) to node 3 (N3), as shown in
Figure 6 and one gateway node (GW) which is connected to the server. We will have two constant bit rates (cbr) streams, one from node 0 and the other from node 2. The destination for both streams will be gateway node (GW). We will call them cbr0 and cbr2 respectively. According to AOMDV protocol, cbr2 traffic will go from node 2 to node 0 then node GW, and cbr0 traffic will go to node GW directly. Node 2 traffic, cbr2 will go through two paths, the primary one through node 0 and the secondary through node 1. After three h during sending packets, node 0 is affected by RAIN (which is the event).
Table 1 and
Table 2 show the result of routing table before and after rain is detected at node 0, the routing table for node 2 and 3 has been changed which take another route through node 1 instead of the primary one through node 0 to send data to GW (destination) because node 0 is affected by RAIN. Hence node 0 has very important data (soil moisture) and it has to send it first and should take the highest priority to send data.
5.2. Simulation Setup
To show that our proposed protocol is also scalable we used simulation tools for 5 node scenario and for a very large scenario consisting of 30 nodes. The source code of the simulation is written in TCL language and runs the simulation example on ns-2.35 Linux Ubuntu version 12.
For 5 node setup, we use standard AOMDV in first period from 0 to 900 in second one from 900 to 2000 we use the modified version of AOMDV.
An AWK script was built to calculate the average of Throughput and End to End Delay on node 0 and node 1 before and after node 1 affected by raining. The highest priority data stream will grant to cbr1 coming from node 1 because it affected by rain and it has important data that should be send to the destination node 2. Rerouting cbr0 coming from node 0 traffic through node 4 which has data with low priority. In this way we reduce forwarding load on node 1 that means the throughput and end to end delay will be better on cbr1 after node 1 affected by rain. The Simulation Scenario Environment is shown in
Table 3.
For the complex scenario consisting of 30 nodes, we calculate that 5 out of 30 nodes were affected by rain and measure the performance and the energy consumption.
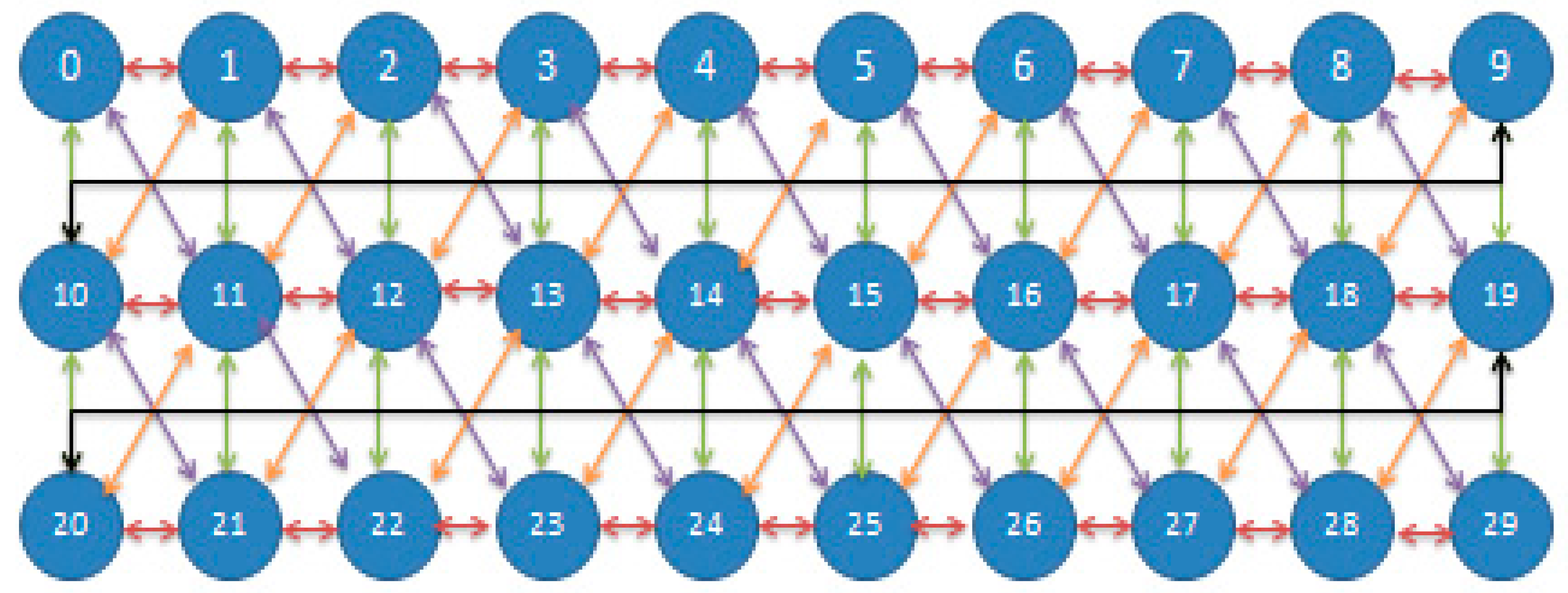
There are 30 wireless nodes from node 0 to node 29 distributed with fixed location across the grid as shown in
Figure 7. We will have two constant bit rates (cbr) streams one from node 0 and one from node 1 the destination for both streams will be node 29 (GW) we will call them cbr0 and cbr1 respectively. According to AOMDV protocol cbr0 traffic will go through the path node 0 -> node 1 -> node 2 -> node 13 -> node 4 -> node 15 -> node 6 -> node 17 -> node 18 then node 29, and cbr1 traffic will go through the same path.
The five nodes which are affected by rain are 1, 12, 16, 21, 25. This means that node 0 or 1 will use secondary paths when any node in the primary path is affected by RAIN.
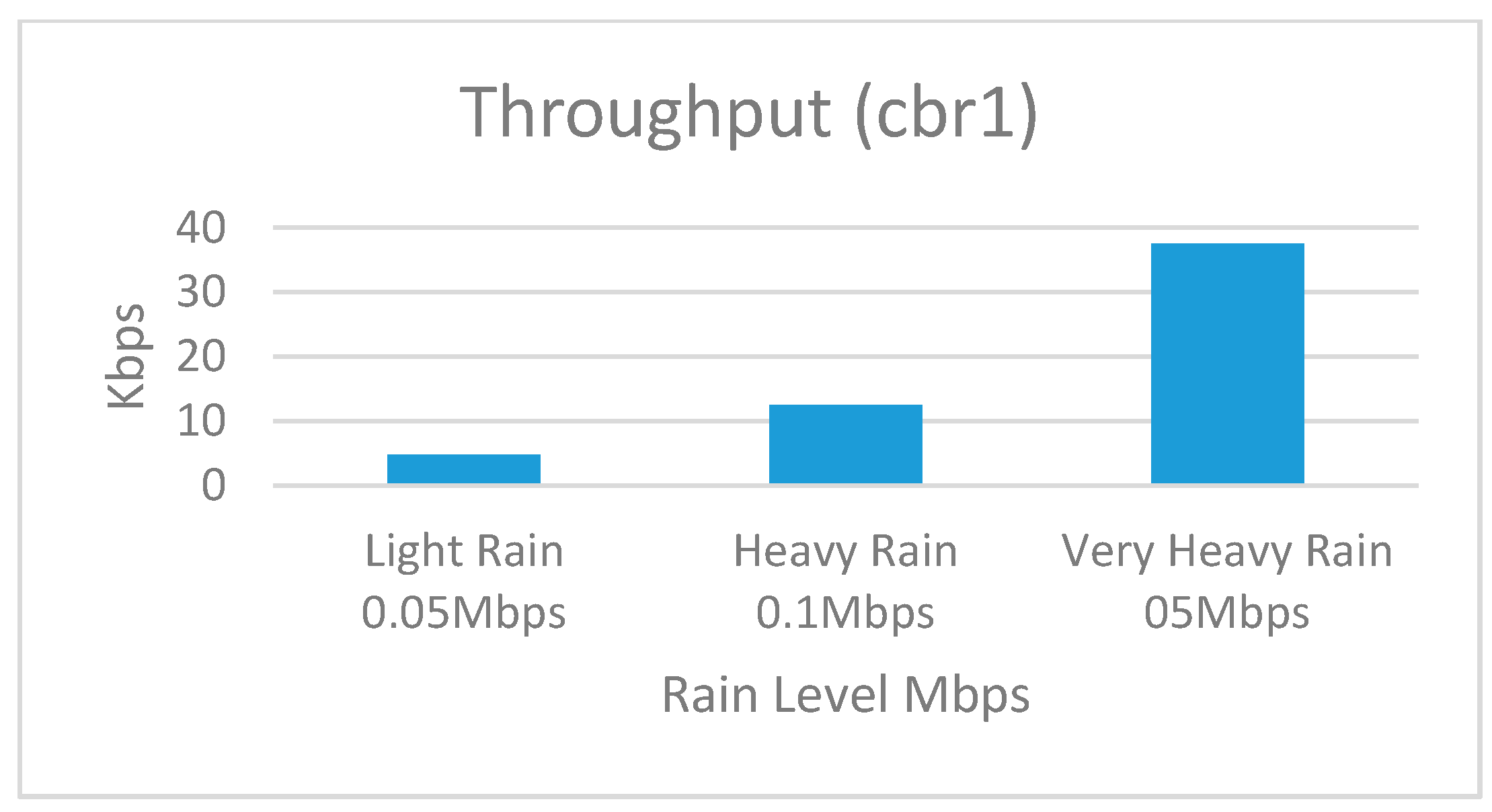
Simulation time is 2500 ms, we set up the constant bit rate (cbr) with variable rate values depending on rain level. For example, when it is raining lightly, the (cbr) rate will be 0.05 Mbps, when rain becomes heavier, the (cbr) rate changed to 0.1 Mbps and, finally, when flood occurs, the (cbr) rate changes to 0.5 Mbps. Packet size for all (cbr) is 1000 byte.
5.3. Performance Measurements
5.3.1. Performance Measurements for 5 Node Simulation Setup
An AWK script was built to calculate the average of Throughput and End to End Delay on node 0 and node 2 before and after node 0 was affected by rain. Before rainfall we used the standard AOMDV protocol and after the rainfall we used our modified AOMDV protocol to compare its performance with the standard AOMDV. The highest priority data stream will be granted to cbr0 coming from node 0 because it is affected by rain and it has important data that should be sent to the destination GW. We re-routed the cbr2 coming from node 2 traffic through node 1 which has data with low priority. In this way we reduce forwarding load on node 0, that means the throughput and end to end delay will be better on cbr0 after node 0 is affected by rain because less traffic is now going through that node.
The results listed in
Table 4 clearly show improvement of Throughput and End to End Delay on cbr0 coming from node 0 which validate our assumptions and it showing that the event-driven approach does improve overall network efficiency.
5.3.2. Performance Measurements for 30 Node Simulation Setup
Before rainfall we used the standard AOMDV protocol and after the rainfall we used our modified AOMDV protocol to compare its performance with the standard AOMDV. In this simulation scenario we divided the simulation period depending on raining level, for instance with no rain the period from 0 to 900 s, light rain period from 900 to 2000 s and heavy rain from 2000 to 2500 s.
An AWK script was built to calculate the average of Throughput and End to End Delay on node 0 and node 1 before and after node 1 is affected by rainfall. The highest priority data stream will be granted to cbr1 coming from node 1 because it is affected by rain and it has important data that should be send to the destination node (GW). We reroute cbr0 coming from node 0 traffic through node 10 which has data with low priority. In this way we reduce forwarding load on node 1, which means that the throughput and end to end delay will be better on cbr1 after node 1 affected by rain.
Node 1 is affected by two levels of rain light rain and heavy rain, so we compared the Throughput and End to End Delay in two levels.
The results listed in
Table 5 clearly show improvement in Throughput and End to End Delay on cbr1 coming from node 1 which validates our assumptions and it shows that the event-driven approach does improve overall network efficiency.
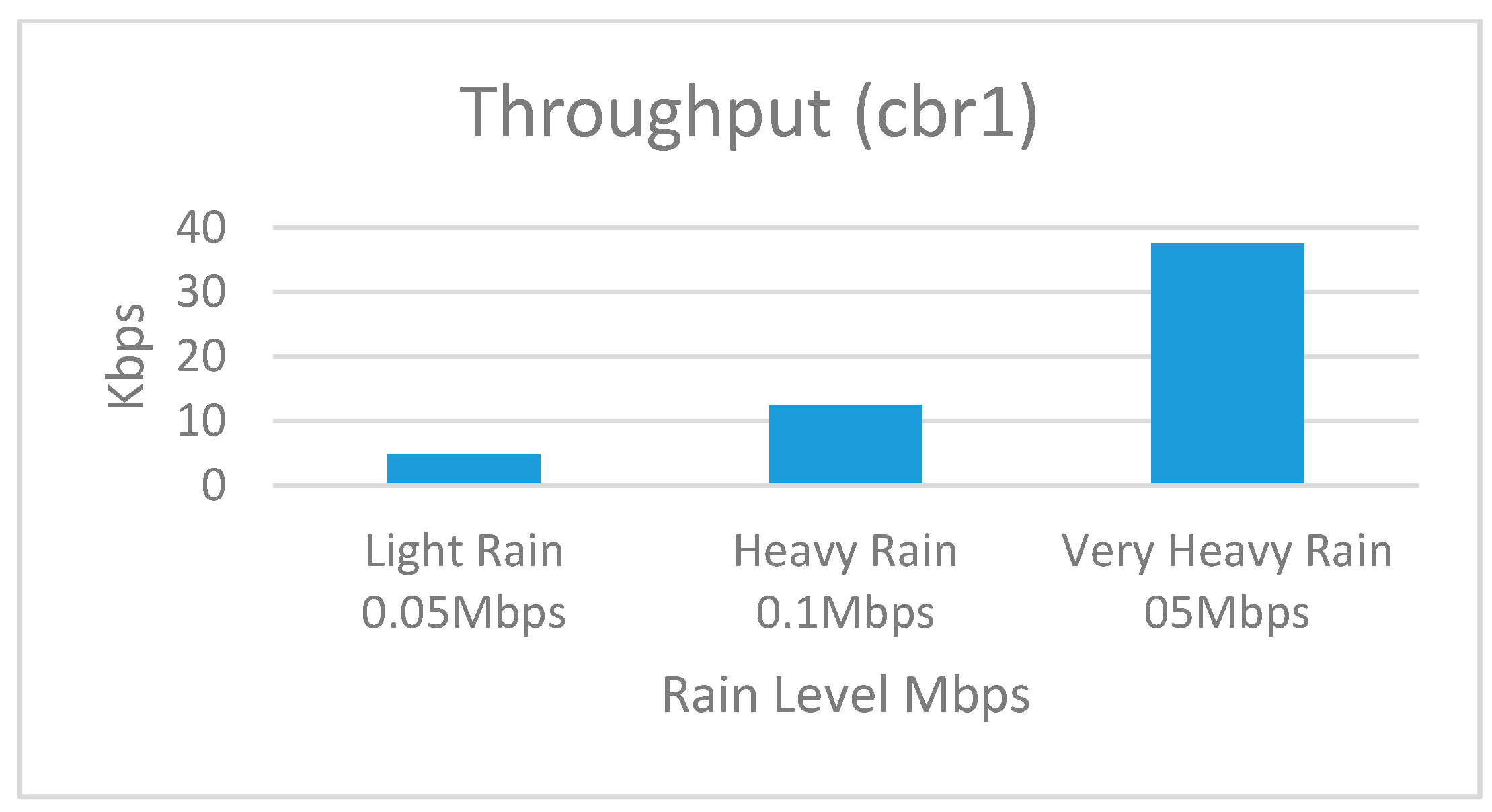
Figure 8 shows the throughput of Node 1, separately being affected by rain. The reason behind this increase in throughput is that at heavy and very heavy rain, we use the modified AOMDV protocol.
5.4. Energy Consumption
We measured the energy consumption for the WSN testbed and also for simulation networks. Before rainfall we used the standard AOMDV protocol and after the rainfall we used our modified AOMDV protocol to compare the energy consumption of our proposed protocol with the standard AOMDV. Before rainfall all the nodes sent the sampled data every 3 h and use multiple routes to send data to the gateway node. When there is no rainfall, HELLO messages are being sent but after rainfall is detected at any node, it sends STATUS messages to other nodes and stops sending HELLO messages, as a result no data is now sent to the affected node and its priority to send data also increases. By rerouting, the data sent to the affected node is greatly reduced hence the receiving energy is also reduced significantly. The affected node now sends data after every 1 s, this operation is continued as long it is raining. Hence when it is raining the affected nodes are receiving very less data and have just their own data to send, the overall energy for the affected nodes also decreases significantly.
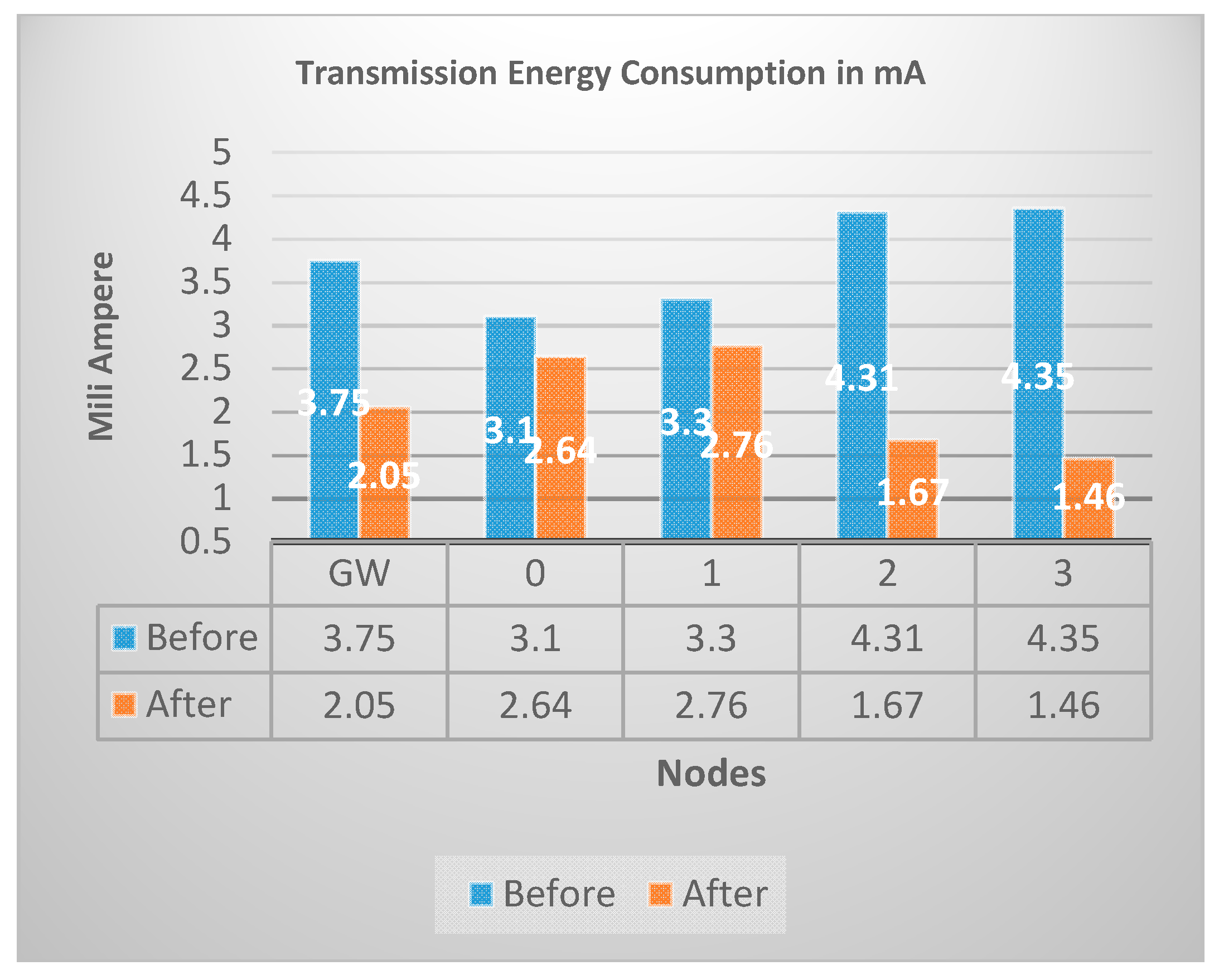
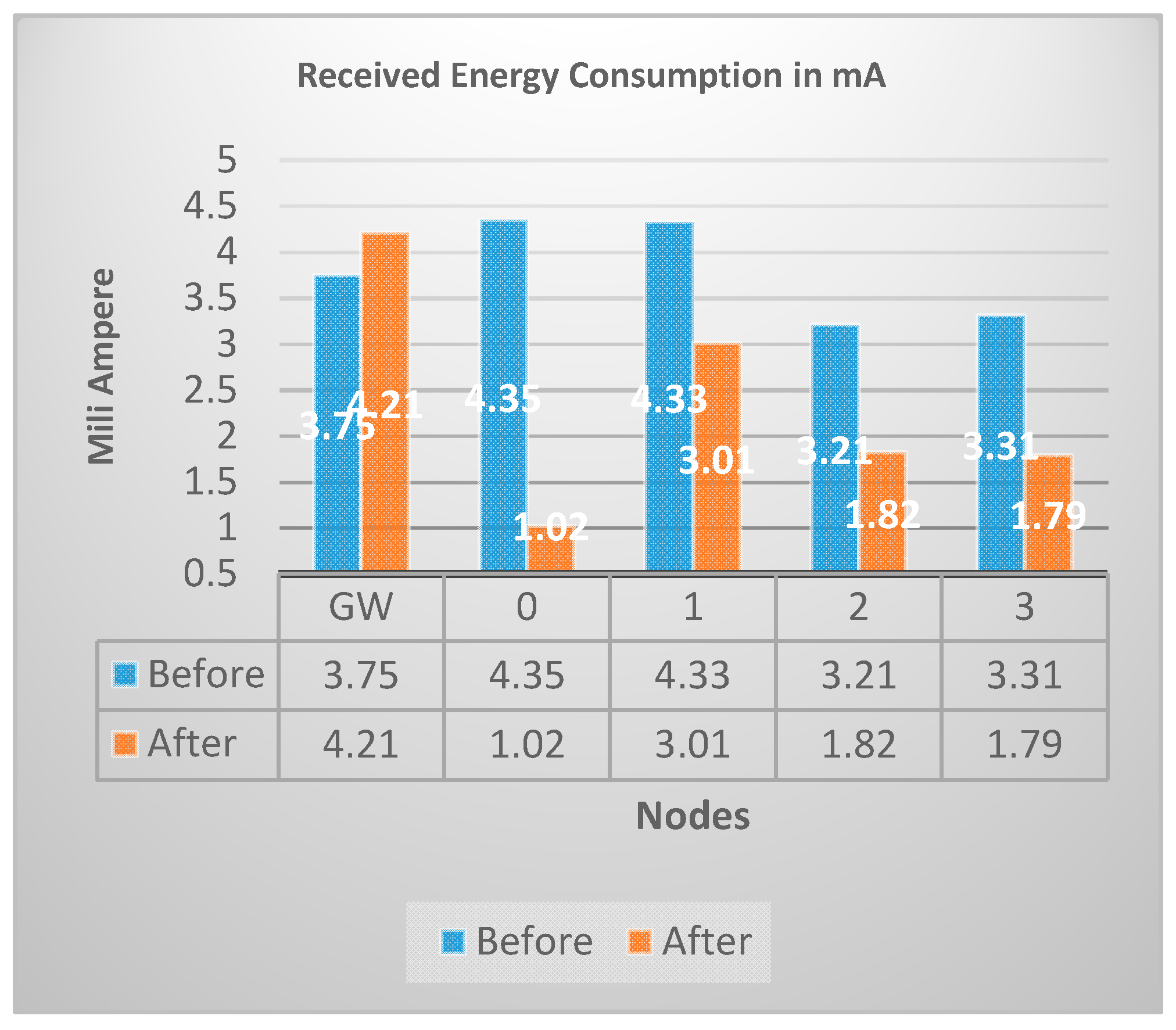
We measure the energy consumption in three modes for each sensor node, idle mode, receiving mode and transmitting mode. The energy consumed in idle mode is called idle energy (Idle Energy). The energy consumed by a node in transmission of data is called transmission energy (Trans Energy) and the energy consumed by a node to receive data is called receiving energy (Rec Energy).
When a node is affected by rain it will receive a rain event, this event triggers a special broadcast rain packet called STATUS message. Every node that is adjacent to this node will receive this packet. The affected nodes will still send HELLO messages but stop responding to RREQ messages, this will prevent the neighboring nodes from seeing it and sending their data through the affected node.
Hence, the nodes affected by rainfall will not receive any packets from other nodes and hence they will require very less receiving energy, on the other hand they will just have their own data to transmit, hence the transmission energy also decreases.
5.4.1. Energy Consumption for 5 Node WSN Testbed
The Waspmotes consumes 15 mA of energy per hour in switched on state and just consumes 55 µA of energy per hour in sleep state [
41]. We have designed our protocol to be energy-efficient. In our protocol sensor data under normal events are sampled for 10 s after every 3 h and sent to the server. When we measured energy consumption for our protocol it was found that, it only consumes 0.004 mA of energy per hour. If we have a rainfall event we implement second scheme under which we sample the data for 10 s after every 10 s, only for the sensor node experiencing the rainfall event, since the soil moisture may change very rapidly. In second scheme, when there is a rainfall our protocol consumes only 0.042 mA of energy per hour for the effected node, which is also very less than the default energy consumption of 15 mA per hour for the Waspmote [
41]. Hence, our protocol is also energy efficient.
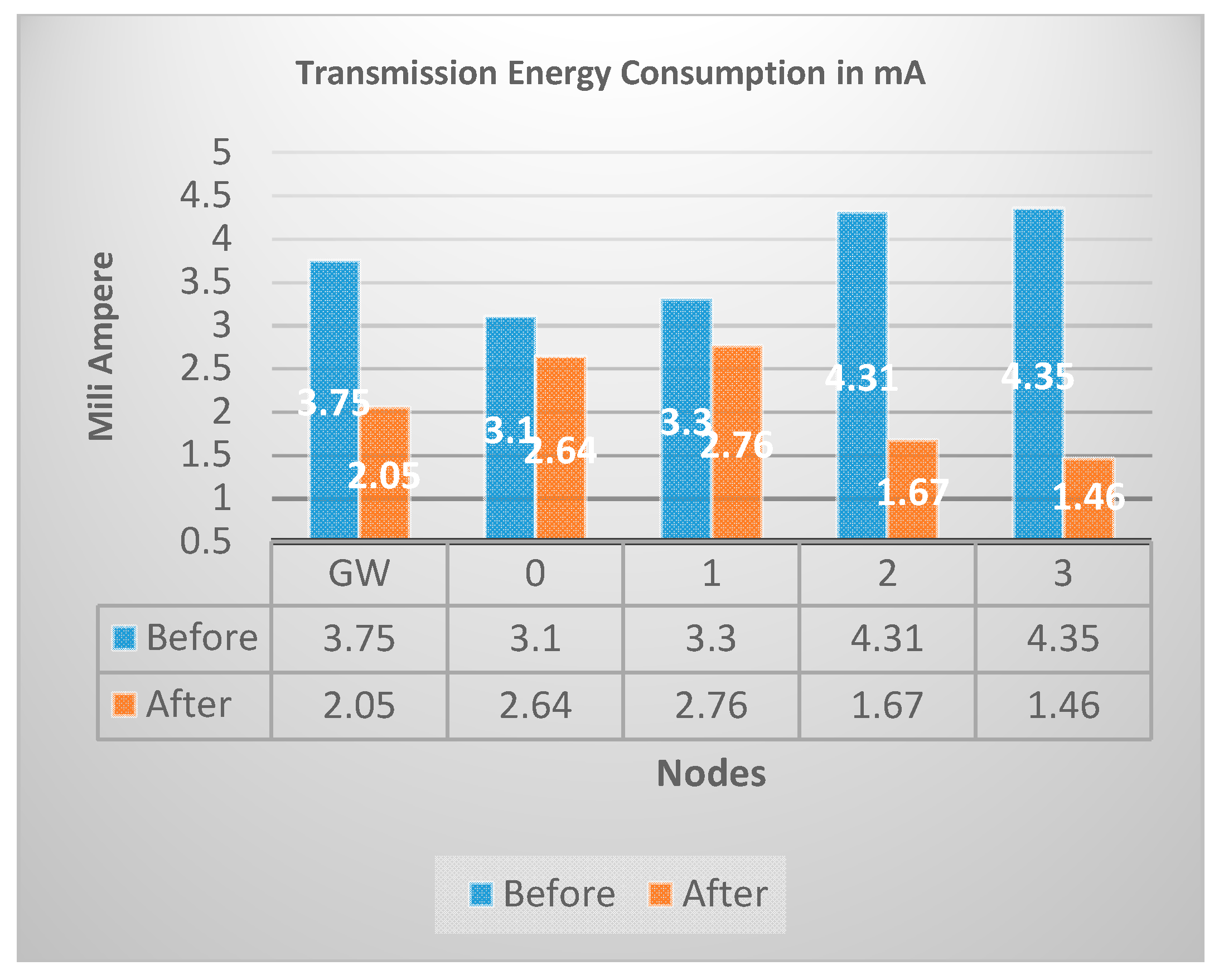
As shown in
Table 6 and
Table 7 the energy measurements in mA taken after rainfall when we use modified AOMDV, are less than those taken before rainfall when we use standard AOMDV, for both received energy (Rec Energy) as well as transmission energy (Trans Energy) because the nodes affected by rainfall will not receive any data from other nodes and hence they will require very less receiving energy, on the other hand they will just have their own data to transmit, hence the transmission energy also decreases. We also show these results in
Figure 9 and
Figure 10.
5.4.2. Energy Consumption for 30 Node Simulation Setup
This section of our paper is concerned about the energy consumptions for all nodes before the nodes are affected by rain, when the nodes will use the standard version of AOMDV and after the nodes are affected by rain when they will use the modified version of AOMDV, the calculation of total energy has been done during the simulation periods for each cases before and after the nodes affected by rain.
The total energy consumed has been calculated for all nodes before and after the nodes were affected by rain for the three simulations. Also, we calculated the rate of decrease in consumed energy before and after the nodes are affected by rain.
Table 8 and
Table 9 clearly show that of consumption energy for affected nodes before is greater than energy consumption after rainfall starts. As we can see from the ‘
Total’ columns in both tables, the total energy consumed decreases for all the nodes and the decrease in energy is much greater for the nodes affected by rainfall. The idle energy, transmission energy as well received energy decreases for all the nodes. The largest decrease in total energy is due to the decrease in transmission energy.
We calculate total energy consumed by all the nodes that are affected by rainfall.
The total energy for node (k) =
The total energy for all affected nodes =
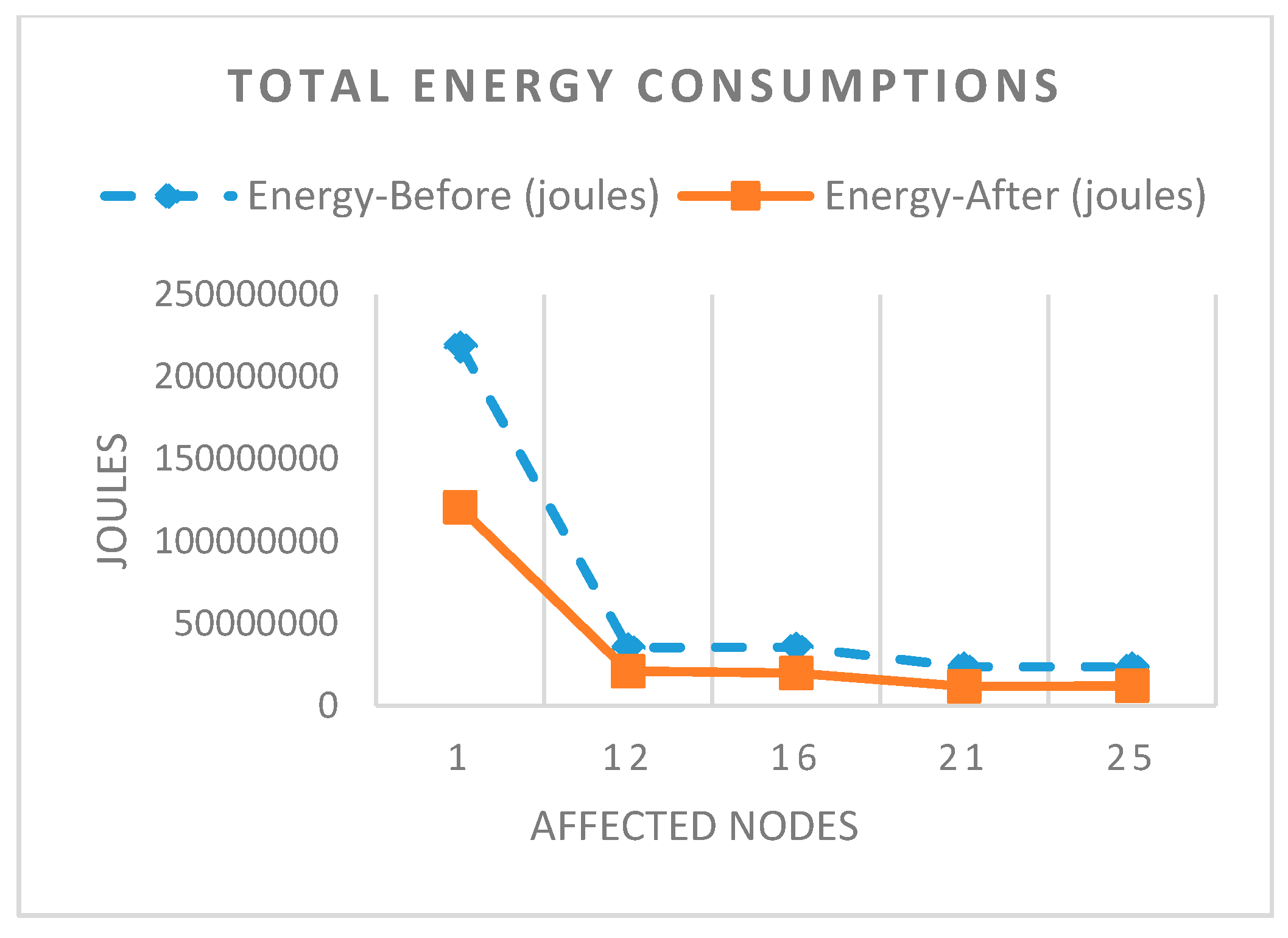
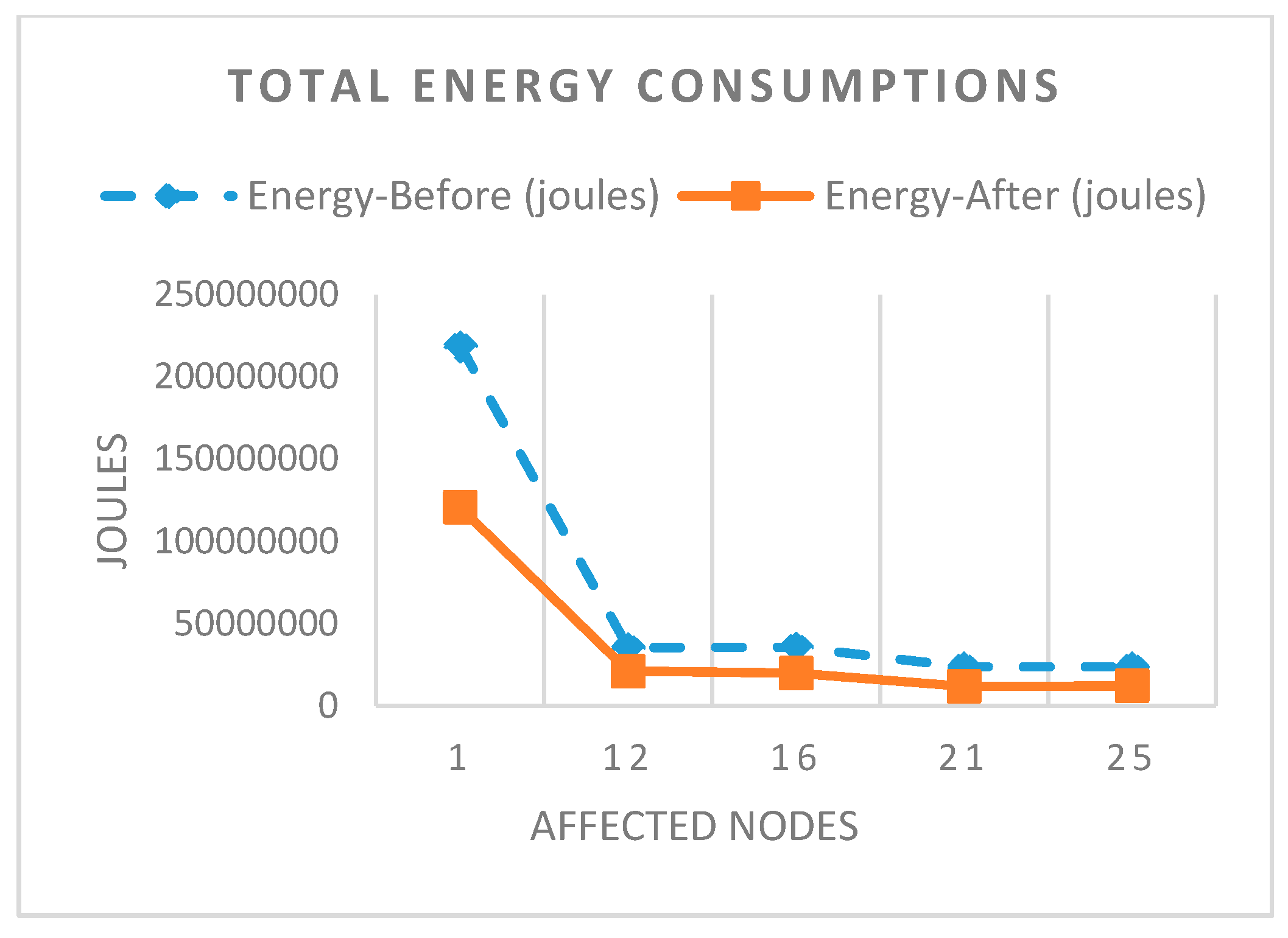
We calculated the total consumed energy for all affected nodes before rains as = T-energy-before = 337,727,894.70.
And total consumed energy for all affected nodes after rains = T-energy-after = 224,066,589.63.
Therefore, the consumed energy decreasing rate = (T-energy-before/T-energy-after) %
Rate of decrease in Consumed energy (affected nodes) = 51%
We can clearly observe that the energy consumptions for all nodes affected by rain has decreased sharply as shown in
Figure 11, also the energy consumptions on all nodes has decreased. The main reason for this decrease is that we stop sending data from any neighbors through the node that is affected by rain. Hence, the nodes affected by rainfall will not receive any data from other nodes and hence they will require very less receiving energy, on the other hand they will just have their own data to transmit, hence the transmission energy also decreases.
The above figure is showing energy consumption by 5 nodes before and after they are affected by rain. Again our modified AOMDV clearly outperforms the standard AOMDV in terms of energy consumption.
The energy consumption for all the non-affected nodes and nodes neighboring the affected nodes has also decreased. This is due to the fact that the before rainfall there were many routes to send data. However, after rainfall the affected nodes do not receive data from neighboring nodes, hence there is less traffic from the neighboring nodes. So the energy consumption for the non-affected nodes and the nodes neighboring the affected nodes also decreases.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}