
Combined Optimisation of Traffic Light Control Parameters and Autonomous Vehicle Routes

Highlights
- The proposed method aims to jointly optimise the signal settings and routes of centrally managed autonomous vehicles.
- The proposed approach works on several test networks.
- In the future, it will be possible to optimise autonomous vehicle routes and traffic light control parameters jointly.
- The effects of the proposed procedure can improve total travel time on the network.
Abstract
1. Introduction
2. Background
2.1. Optimisation of Signal Settings on a Network
2.2. Autonomous Vehicles
2.3. Paper Contribution
3. Model Formulation
- C is the vector of the effective cycle times (s) at each intersection j, Cj;
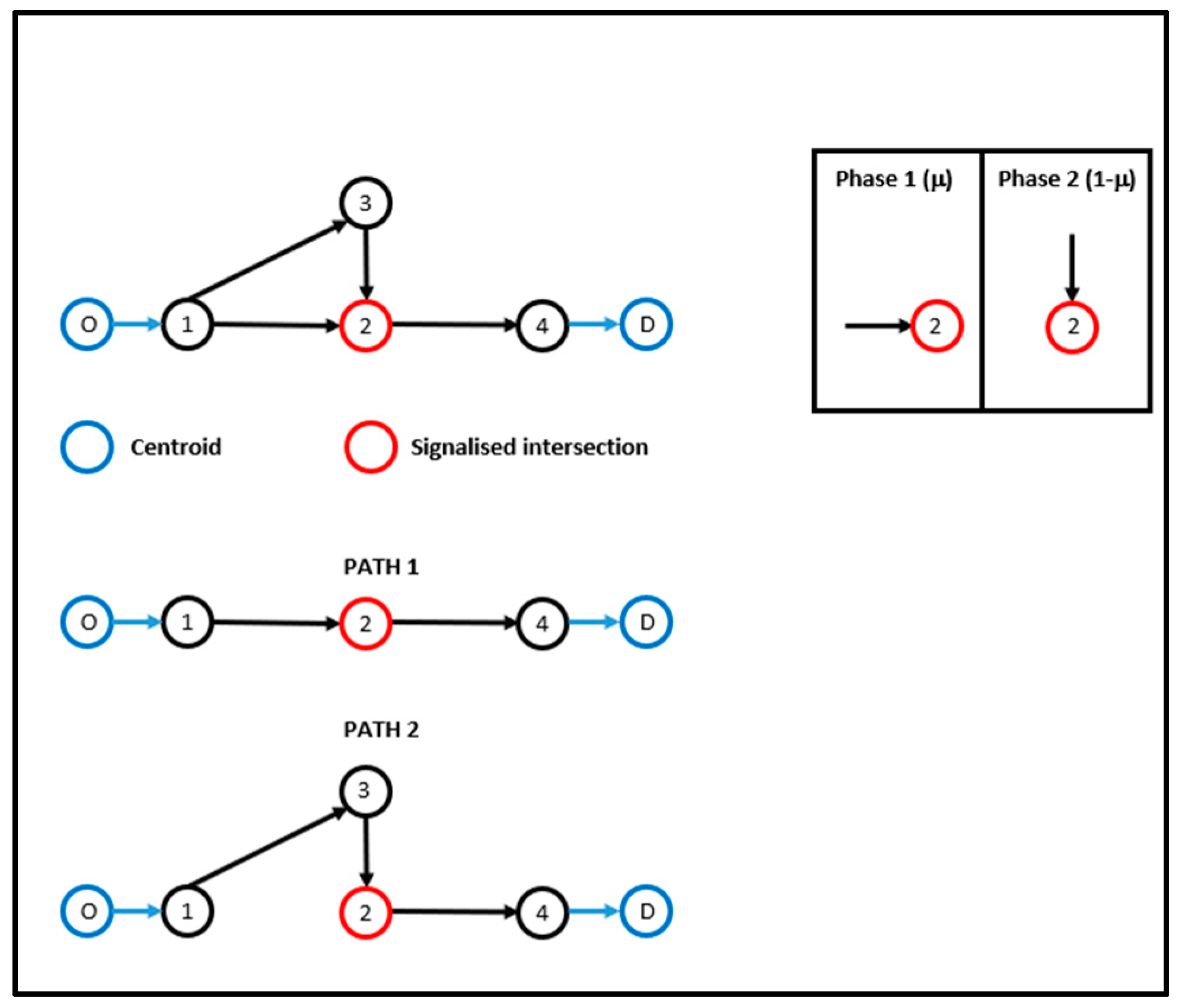
- μ is the vector of the ratios, μj, between the effective green time of a phase (conventionally, phase 1) at intersection j, egj1, and the effective cycle time, Cj: μj = egj1/ Cj. So, at intersection j, the ratio for phase 1 is μj and for phase 2 is 1 − μj.
4. Solution Algorithm
5. Numerical Results
5.1. Toy Network
- Li is the length of link i;
- Vi is the free flow speed on link i;
- Capi is the capacity of link i.
+ 900 ·T · ((Xi j −1) + ((Xi j−1)2 + (4 · Xi j /(ACapi j · T))1/2,
5.2. Small Network
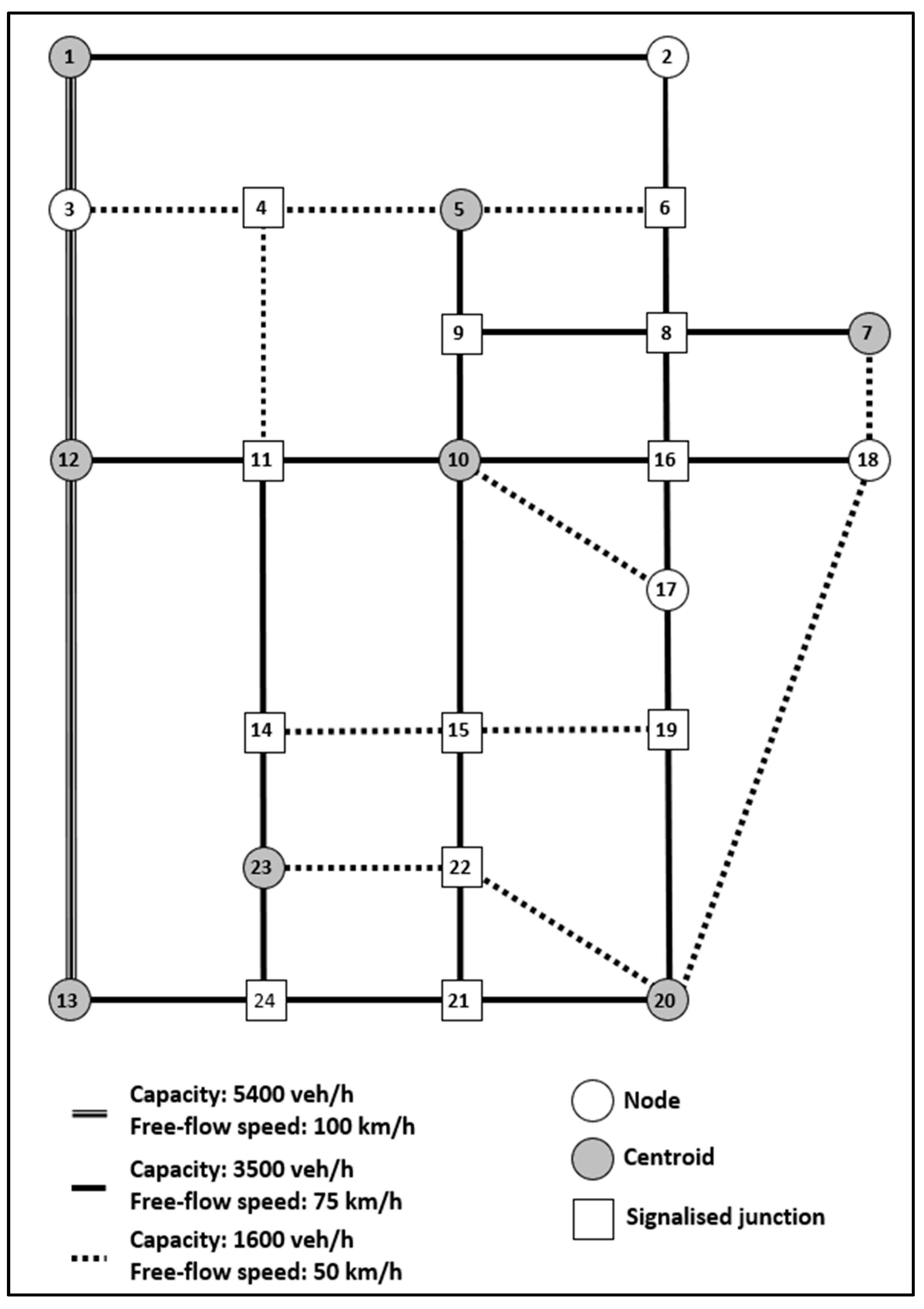
5.3. Sioux Falls Network
- For this level of demand, the duration of the traffic light cycle is an insignificant parameter; in fact, the optimisation procedure leaves it practically unchanged in all the tests carried out, unlike the μ terms, which vary significantly with respect to the initial points.
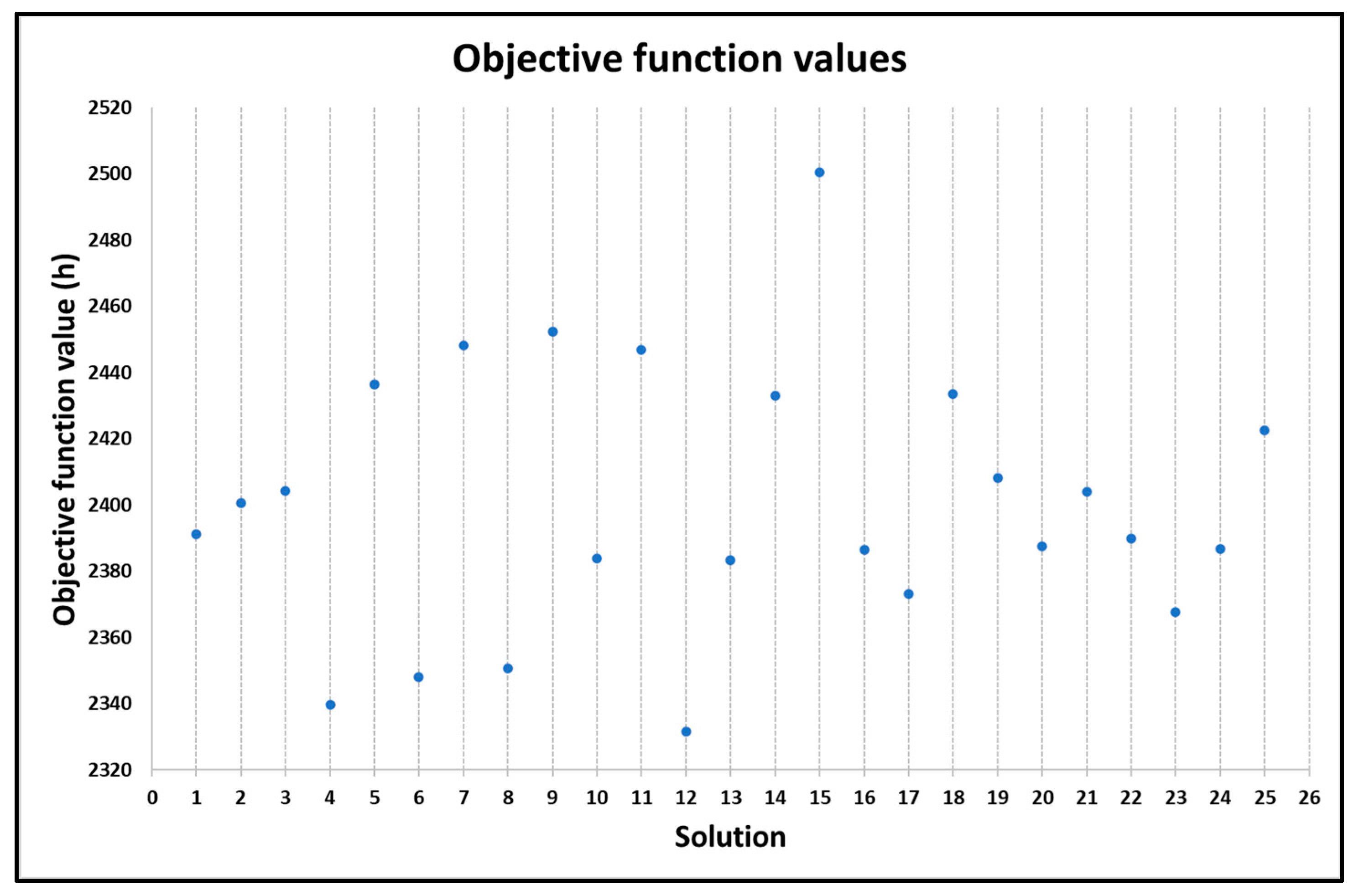
- All the solutions have different values of the objective function, as can be seen in Figure 6, although some have very similar values; the best solution is the one obtained from the initial solution 12 (2332 h), while the worst is the one obtained from the initial solution 15 (2500 h). The difference is about 7%.
- The traffic flows on the links are different for the different solutions, as can be seen from Figure 7. On some links, the differences are significant (up to 739 veh/h), while on other links, the difference between the traffic flows is less evident (minimum difference 7 veh/h).
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronyms | |
|---|---|
| AV | Autonomous Vehicle |
| ENDP | Equilibrium Network Design Problem |
| GOSS [LOSS] | Global [Local] Optimisation of Signal Settings |
| GRG | Generalised Reduced Gradient |
| HCM | Highway Capacity Manual |
| HDV | Human-Driven Vehicle |
| MaaS | Mobility as a Service |
| OD | Origin–Destination |
| SO | System Optimal |
| SSDP | Signal Setting Design Problem |
| VOT | Value Of Time |
| Symbols and Variables | |
|---|---|
| A | link-path incidence matrix |
| ACapi j | approach capacity at intersection j of link i |
| ai,k | cells of the link-path incidence matrix |
| c | link cost vector |
| Capi | capacity of link i |
| ci | generalised cost on link i |
| Cj | effective cycle time at intersection j |
| Cmax [Cmin] | maximum [minimum] feasible cycle length |
| d | demand vector |
| dod | demand between origin o and destination d |
| edi | expected delay on link i |
| egj1 | effective green time for phase 1 at intersection j |
| f | link flow vector |
| fi | flow on link i |
| fSO | system optimum flow vector |
| g [g^] | vector of the [optimal] signal setting variables |
| h | path flow vector |
| hk | flow on path k |
| i | index of links |
| j | index of intersections |
| k,od | index of a path k connecting od pair |
| Li | length of link i |
| npod | number of feasible paths connecting od pair |
| od | origin–destination pair |
| P | path choice probability matrix |
| rti | running time on link i |
| Sψ | feasibility set for ψk,od |
| Sf | feasibility set for system optimum flows |
| Sg | feasibility set for the signal setting variables |
| si j | saturation flow at intersection j of link i |
| Sod | set of feasible paths connecting od pair |
| T | simulation period |
| Vi | free flow speed on link i |
| Xi j | flow to capacity ratio of the approach at intersection j of link i |
| μj | effective green time/cycle ratio for phase 1 at intersection j |
| μmax [μmin] | maximum [minimum] feasible effective green time/cycle ratio |
| ψk,od | percentage of vehicles using path k to travel between o and d |
| ψ | path percentage matrix |
| ψ^ | matrix of the optimal path percentages |
Appendix B
| Link | Node_in | Node_fi | Length [km] | Road Capacity [veh/h] | Saturation Flow [veh/h] | Free-Flow Speed [km/h] |
|---|---|---|---|---|---|---|
| 1 | 1 | 2 | 0.5 | 1800 | 1800 | 40 |
| 2 | 1 | 3 | 0.4 | 1800 | - | 40 |
| 3 | 2 | 4 | 0.5 | 1800 | - | 40 |
| 4 | 3 | 2 | 0.2 | 1800 | 1800 | 40 |
| Link | Length [km] | Capacity [veh/h] | Free-Flow Speed [km/h] |
|---|---|---|---|
| 1 | 0.5 | 1600 | 60 |
| 2 | 0.5 | 1400 | 60 |
| 3 | 0.3 | 1400 | 60 |
| 4 | 0.5 | 1200 | 50 |
| 5 | 0.8 | 1200 | 50 |
| 6 | 0.6 | 1200 | 50 |
| 7 | 0.8 | 1200 | 50 |
| 8 | 0.8 | 1200 | 50 |
| 9 | 0.3 | 1200 | 50 |
| 10 | 0.5 | 1200 | 50 |
| 11 | 0.7 | 1800 | 80 |
| 12 | 0.6 | 1200 | 50 |
| 13 | 0.2 | 1800 | 80 |
| 14 | 0.6 | 1800 | 80 |
| Link # | Node_in | Node_fi | Length [km] | Capacity/Saturation Flow [veh/h] | Free-Flow Speed [km/h] |
|---|---|---|---|---|---|
| 1 [2] | 1 [2] | 2 [1] | 6.0 | 3500 | 75 |
| 3 [4] | 1 [3] | 3 [1] | 2.0 | 5400 | 100 |
| 5 [6] | 2 [6] | 6 [2] | 2.0 | 3500 | 75 |
| 7 [8] | 3 [4] | 4 [3] | 2.0 | 1600 | 50 |
| 9 [10] | 3 [12] | 12 [3] | 5.0 | 5400 | 100 |
| 11 [12] | 4 [5] | 5 [4] | 2.0 | 1600 | 50 |
| 13 [14] | 4 [11] | 11 [4] | 5.0 | 1600 | 50 |
| 15 [16] | 5 [6] | 6 [5] | 2.0 | 1600 | 50 |
| 17 [18] | 5 [9] | 9 [5] | 2.5 | 3500 | 75 |
| 19 [20] | 6 [8] | 8 [6] | 2.5 | 3500 | 75 |
| 21 [22] | 7 [8] | 8 [7] | 3.0 | 3500 | 75 |
| 23 [24] | 7 [18] | 18 [7] | 2.5 | 1600 | 50 |
| 25 [26] | 8 [9] | 9 [8] | 2.0 | 3500 | 75 |
| 27 [28] | 8 [16] | 16 [8] | 2.5 | 3500 | 75 |
| 29 [30] | 9 [10] | 10 [9] | 2.5 | 3500 | 75 |
| 31 [32] | 10 [11] | 11 [10] | 2.0 | 3500 | 75 |
| 33 [34] | 10 [15] | 15 [10] | 3.0 | 3500 | 75 |
| 35 [36] | 10 [16] | 16 [10] | 2.0 | 3500 | 75 |
| 37 [38] | 10 [17] | 17 [10] | 2.5 | 1600 | 50 |
| 39 [40] | 11 [12] | 12 [11] | 2.0 | 3500 | 75 |
| 41 [42] | 11 [14] | 14 [11] | 3.0 | 3500 | 75 |
| 43 [44] | 12 [13] | 13 [12] | 6.0 | 5400 | 100 |
| 45 [46] | 13 [24] | 24 [13] | 2.0 | 3500 | 75 |
| 47 [48] | 14 [15] | 15 [14] | 2.0 | 1600 | 50 |
| 49 [50] | 14 [23] | 23 [14] | 1.5 | 3500 | 75 |
| 51 [52] | 15 [19] | 19 [15] | 2.0 | 1600 | 50 |
| 53 [54] | 15 [22] | 22 [15] | 1.5 | 3500 | 75 |
| 55 [56] | 16 [17] | 17 [16] | 1.5 | 3500 | 75 |
| 57 [58] | 16 [18] | 18 [16] | 3.0 | 3500 | 75 |
| 59 [60] | 17 [19] | 19 [17] | 1.5 | 3500 | 75 |
| 61 [62] | 18 [20] | 20 [18] | 6.7 | 1600 | 50 |
| 63 [64] | 19 [20] | 20 [19] | 3.0 | 3500 | 75 |
| 65 [66] | 20 [21] | 21 [20] | 2.0 | 3500 | 75 |
| 67 [68] | 20 [22] | 22 [20] | 2.5 | 1600 | 50 |
| 69 [70] | 21 [22] | 22 [21] | 1.5 | 3500 | 75 |
| 71 [72] | 21 [24] | 24 [21] | 2.0 | 3500 | 75 |
| 73 [74] | 22 [23] | 23 [22] | 2.0 | 1600 | 50 |
| 75 [76] | 23 [24] | 24 [23] | 1.5 | 3500 | 75 |
| O\D | 1 | 5 | 7 | 10 | 12 | 13 | 20 | 23 |
|---|---|---|---|---|---|---|---|---|
| 1 | - | 92.4 | 231.0 | 600.6 | 92.4 | 231.0 | 138.6 | 138.6 |
| 5 | 92.4 | - | 92.4 | 462.0 | 92.4 | 92.4 | 46.2 | 46.2 |
| 7 | 231.0 | 92.4 | - | 877.8 | 323.4 | 184.8 | 231.0 | 92.4 |
| 10 | 600.6 | 462.0 | 877.8 | - | 924.0 | 877.8 | 1155.0 | 831.6 |
| 12 | 92.4 | 92.4 | 323.4 | 924.0 | - | 600.6 | 184.8 | 323.4 |
| 13 | 231.0 | 92.4 | 184.8 | 877.8 | 600.6 | - | 277.2 | 369.6 |
| 20 | 138.6 | 46.2 | 231.0 | 1155.0 | 231.0 | 277.2 | - | 323.4 |
| 23 | 138.6 | 46.2 | 92.4 | 831.6 | 323.4 | 369.6 | 323.4 | - |
| O\D | 1 | 5 | 7 | 10 | 12 | 13 | 20 | 23 |
|---|---|---|---|---|---|---|---|---|
| 1 | - | 2 | 3 | 6 | 1 | 1 | 10 | 2 |
| 5 | 2 | - | 2 | 1 | 3 | 8 | 8 | 4 |
| 7 | 3 | 2 | - | 3 | 3 | 10 | 3 | 9 |
| 10 | 6 | 1 | 3 | - | 1 | 5 | 5 | 3 |
| 12 | 1 | 3 | 3 | 1 | - | 1 | 10 | 1 |
| 13 | 1 | 8 | 10 | 5 | 1 | - | 1 | 1 |
| 20 | 10 | 8 | 3 | 5 | 10 | 1 | - | 3 |
| 23 | 2 | 4 | 9 | 3 | 1 | 1 | 3 | - |
| Intersection → | 4 | 6 | 8 | 9 | 11 | 14 | 15 | 16 | 19 | 21 | 22 | 24 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Solution ↓ | C | μ | C | μ | C | μ | C | μ | C | μ | C | μ | C | μ | C | μ | C | μ | C | μ | C | μ | C | μ |
| 1 | 75 | 0.50 | 75 | 0.50 | 75 | 0.50 | 75 | 0.50 | 75 | 0.50 | 75 | 0.50 | 75 | 0.50 | 75 | 0.50 | 75 | 0.50 | 75 | 0.50 | 75 | 0.50 | 75 | 0.50 |
| 2 | 75 | 0.20 | 75 | 0.20 | 75 | 0.20 | 75 | 0.20 | 75 | 0.20 | 75 | 0.20 | 75 | 0.20 | 75 | 0.20 | 75 | 0.20 | 75 | 0.20 | 75 | 0.20 | 75 | 0.20 |
| 3 | 75 | 0.80 | 75 | 0.80 | 75 | 0.80 | 75 | 0.80 | 75 | 0.80 | 75 | 0.80 | 75 | 0.80 | 75 | 0.80 | 75 | 0.80 | 75 | 0.80 | 75 | 0.80 | 75 | 0.80 |
| 4 | 30 | 0.50 | 30 | 0.50 | 30 | 0.50 | 30 | 0.50 | 30 | 0.50 | 30 | 0.50 | 30 | 0.50 | 30 | 0.50 | 30 | 0.50 | 30 | 0.50 | 30 | 0.50 | 30 | 0.50 |
| 5 | 120 | 0.50 | 120 | 0.50 | 120 | 0.50 | 120 | 0.50 | 120 | 0.50 | 120 | 0.50 | 120 | 0.50 | 120 | 0.50 | 120 | 0.50 | 120 | 0.50 | 120 | 0.50 | 120 | 0.50 |
| 6 | 30 | 0.20 | 30 | 0.20 | 30 | 0.20 | 30 | 0.20 | 30 | 0.20 | 30 | 0.20 | 30 | 0.20 | 30 | 0.20 | 30 | 0.20 | 30 | 0.20 | 30 | 0.20 | 30 | 0.20 |
| 7 | 120 | 0.20 | 120 | 0.20 | 120 | 0.20 | 120 | 0.20 | 120 | 0.20 | 120 | 0.20 | 120 | 0.20 | 120 | 0.20 | 120 | 0.20 | 120 | 0.20 | 120 | 0.20 | 120 | 0.20 |
| 8 | 30 | 0.80 | 30 | 0.80 | 30 | 0.80 | 30 | 0.80 | 30 | 0.80 | 30 | 0.80 | 30 | 0.80 | 30 | 0.80 | 30 | 0.80 | 30 | 0.80 | 30 | 0.80 | 30 | 0.80 |
| 9 | 120 | 0.80 | 120 | 0.80 | 120 | 0.80 | 120 | 0.80 | 120 | 0.80 | 120 | 0.80 | 120 | 0.80 | 120 | 0.80 | 120 | 0.80 | 120 | 0.80 | 120 | 0.80 | 120 | 0.80 |
| 10 | 75 | 0.20 | 75 | 0.80 | 75 | 0.20 | 75 | 0.80 | 75 | 0.20 | 75 | 0.80 | 75 | 0.20 | 75 | 0.80 | 75 | 0.20 | 75 | 0.80 | 75 | 0.20 | 75 | 0.80 |
| 11 | 75 | 0.80 | 75 | 0.20 | 75 | 0.80 | 75 | 0.20 | 75 | 0.80 | 75 | 0.20 | 75 | 0.80 | 75 | 0.20 | 75 | 0.80 | 75 | 0.20 | 75 | 0.80 | 75 | 0.20 |
| 12 | 30 | 0.20 | 30 | 0.80 | 30 | 0.20 | 30 | 0.80 | 30 | 0.20 | 30 | 0.80 | 30 | 0.20 | 30 | 0.80 | 30 | 0.20 | 30 | 0.80 | 30 | 0.20 | 30 | 0.80 |
| 13 | 30 | 0.80 | 30 | 0.20 | 30 | 0.80 | 30 | 0.20 | 30 | 0.80 | 30 | 0.20 | 30 | 0.80 | 30 | 0.20 | 30 | 0.80 | 30 | 0.20 | 30 | 0.80 | 30 | 0.20 |
| 14 | 120 | 0.20 | 120 | 0.80 | 120 | 0.20 | 120 | 0.80 | 120 | 0.20 | 120 | 0.80 | 120 | 0.20 | 120 | 0.80 | 120 | 0.20 | 120 | 0.80 | 120 | 0.20 | 120 | 0.80 |
| 15 | 120 | 0.80 | 120 | 0.20 | 120 | 0.80 | 120 | 0.20 | 120 | 0.80 | 120 | 0.20 | 120 | 0.80 | 120 | 0.20 | 120 | 0.80 | 120 | 0.20 | 120 | 0.80 | 120 | 0.20 |
| 16 | 70 | 0.53 | 106 | 0.34 | 58 | 0.45 | 73 | 0.54 | 70 | 0.72 | 88 | 0.71 | 52 | 0.78 | 93 | 0.29 | 28 | 0.56 | 87 | 0.34 | 83 | 0.53 | 32 | 0.67 |
| 17 | 110 | 0.27 | 103 | 0.60 | 65 | 0.39 | 85 | 0.60 | 53 | 0.47 | 98 | 0.70 | 26 | 0.58 | 37 | 0.43 | 43 | 0.53 | 52 | 0.41 | 72 | 0.43 | 104 | 0.58 |
| 18 | 78 | 0.55 | 118 | 0.42 | 75 | 0.70 | 93 | 0.65 | 106 | 0.75 | 63 | 0.34 | 47 | 0.53 | 65 | 0.63 | 62 | 0.65 | 30 | 0.65 | 108 | 0.73 | 117 | 0.41 |
| 19 | 67 | 0.60 | 90 | 0.35 | 118 | 0.55 | 41 | 0.27 | 29 | 0.46 | 95 | 0.22 | 106 | 0.46 | 86 | 0.78 | 53 | 0.65 | 87 | 0.56 | 59 | 0.44 | 73 | 0.35 |
| 20 | 61 | 0.47 | 34 | 0.24 | 48 | 0.75 | 32 | 0.63 | 104 | 0.40 | 53 | 0.51 | 65 | 0.26 | 22 | 0.20 | 97 | 0.70 | 32 | 0.39 | 88 | 0.29 | 79 | 0.66 |
| 21 | 40 | 0.53 | 27 | 0.63 | 84 | 0.45 | 82 | 0.38 | 103 | 0.32 | 111 | 0.30 | 115 | 0.75 | 65 | 0.46 | 48 | 0.60 | 60 | 0.37 | 86 | 0.30 | 77 | 0.77 |
| 22 | 117 | 0.38 | 104 | 0.54 | 30 | 0.77 | 36 | 0.52 | 88 | 0.72 | 75 | 0.60 | 31 | 0.50 | 83 | 0.51 | 35 | 0.55 | 68 | 0.40 | 57 | 0.37 | 78 | 0.28 |
| 23 | 115 | 0.27 | 119 | 0.80 | 107 | 0.23 | 56 | 0.66 | 32 | 0.23 | 108 | 0.80 | 42 | 0.38 | 40 | 0.28 | 73 | 0.33 | 28 | 0.39 | 80 | 0.32 | 78 | 0.30 |
| 24 | 27 | 0.58 | 28 | 0.67 | 98 | 0.21 | 46 | 0.35 | 93 | 0.58 | 49 | 0.60 | 64 | 0.68 | 120 | 0.72 | 67 | 0.45 | 50 | 0.44 | 113 | 0.21 | 90 | 0.72 |
| 25 | 38 | 0.29 | 107 | 0.56 | 92 | 0.36 | 118 | 0.33 | 72 | 0.59 | 103 | 0.36 | 105 | 0.54 | 84 | 0.42 | 91 | 0.74 | 42 | 0.70 | 94 | 0.38 | 55 | 0.73 |
References
- Biyik, C.; Abareshi, A.; Paz, A.; Arce Ruiz, R.; Battarra, R.; Rogers, C.D.F.; Lizarraga, C. Smart Mobility Adoption: A Review of the Literature. J. Open Innov. Technol. Mark. Complex. 2021, 7, 146. [Google Scholar] [CrossRef]
- Allam, Z.; Sharifi, A. Research Structure and Trends of Smart Urban Mobility. Smart Cities 2022, 5, 539–561. [Google Scholar] [CrossRef]
- Goumiri, S.; Yahiaoui, S.; Djahel, S. Smart Mobility in Smart Cities: Emerging challenges, recent advances and future directions. J. Intell. Transp. Syst. 2024, 1, 1–37. [Google Scholar] [CrossRef]
- Medina-Tapia, M.; Robusté, F. Exploring paradigm shift impacts in urban mobility: Autonomous Vehicles and Smart Cities. Transp. Res. Procedia 2018, 33, 203–210. [Google Scholar] [CrossRef]
- Gaber, H.; Othman, A.M.; Fahad, A.H. Future of connected autonomous vehicles in smart cities, Solving Urban Infrastructure Problems Using Smart City Technologies. In Solving Urban Infrastructure Problems Using Smart City Technologies. Handbook on Planning, Design, Development, and Regulation; Vacca, J.R., Ed.; Elsevier: Amsterdam, The Netherlands, 2021; pp. 599–611. [Google Scholar]
- Golbabaei, F.; Yigitcanlar, T.; Bunker, J. The role of shared autonomous vehicle systems in delivering smart urban mobility: A systematic review of the literature. Int. J. Sustain. Transp. 2021, 15, 731–748. [Google Scholar] [CrossRef]
- Manfreda, A.; Ljubi, K.; Groznik, A. Autonomous vehicles in the smart city era: An empirical study of adoption factors important for millennials. Int. J. Inf. Manag. 2021, 58, 102050. [Google Scholar] [CrossRef]
- Richter, M.A.; Hagenmaier, M.; Bandte, O.; Parida, V.; Wincent, J. Smart cities, urban mobility and autonomous vehicles: How different cities needs different sustainable investment strategies. Technol. Forecast. Soc. Chang. 2022, 184, 121857. [Google Scholar] [CrossRef]
- Pérez-Moure, H.; Lampon, J.; Velando-Rodriguez, M.E.; Rodriguez-Comesana, L. Revolutionizing the road: How sustainable, autonomous, and connected vehicles are changing digital mobility business models. Eur. Res. Manag. Bus. Econ. 2023, 29, 100230. [Google Scholar] [CrossRef]
- Gallo, M. Models, algorithms, and equilibrium conditions for the simulation of autonomous vehicles in exclusive and mixed traffic. Simul. Model. Pract. Theory 2023, 129, 102838. [Google Scholar] [CrossRef]
- Cascetta, E.; Gallo, M.; Montella, B. Models and algorithms for the optimization of signal settings on urban networks with stochastic assignment models. Ann. Oper. Res. 2006, 144, 301–328. [Google Scholar] [CrossRef]
- Magnanti, T.; Wong, R. Network design and transportation planning: Models and algorithms. Transp. Sci. 1984, 18, 181–197. [Google Scholar] [CrossRef]
- Cascetta, E.; Gallo, M.; Montella, B. An asymmetric SUE model for the combined assignment-control problem. In Selected Proceedings of 8th WCTR; Pergamon Press: Amsterdam, The Netherlands, 1999; Volume 2, pp. 189–202. [Google Scholar]
- Marcotte, P. Network optimization with continuous control parameters. Transp. Sci. 1983, 17, 181–197. [Google Scholar] [CrossRef]
- Cantarella, G.E.; Improta, G.; Sforza, A. Road network signal setting: Equilibrium conditions. In Concise Encyclopedia of Traffic and Transportation Systems; Papageorgiou, M., Ed.; Pergamon Press: Amsterdam, The Netherlands, 1991; pp. 366–371. [Google Scholar]
- Cantarella, G.E.; Sforza, A. Network design models and methods for urban traffic management. In Urban Traffic Networks—Dynamic Flow Modeling and Control; Gartner, N.H., Improta, G., Eds.; Springer: Berlin/Heidelberg, Germany, 1995; pp. 123–153. [Google Scholar]
- Abdelfatah, A.; Mahmassani, H.S. System optimal time-dependent path assignment and signal timing in traffic networks. Transp. Res. Rec. 1999, 1645, 185–193. [Google Scholar] [CrossRef]
- Sheffi, Y.; Powell, W.B. Optimal signal settings over transportation networks. J. Transp. Eng. 1983, 109, 824–839. [Google Scholar] [CrossRef]
- Heydecker, B.G.; Khoo, T.K. The equilibrium network design problem. In Proceedings of the AIRO’90, Conference on Models and Methods for Decision Support, Sorrento, Italy, 23–28 June 1990; pp. 587–602. [Google Scholar]
- Yang, H.; Yagar, S. Traffic assignment and signal control in saturated road networks. Transp. Res. A 1995, 29, 125–139. [Google Scholar] [CrossRef]
- Oda, T.; Otokita, T.; Tsugui, T.; Mashiyama, Y. Application of simulated annealing to optimization of traffic signal timings. In Proceedings of the 8th Ifac Symposium on Transportation Systems, Chania, Greece, 16–18 June 1997. [Google Scholar]
- Wong, S.C.; Yang, H. Reserve capacity of a signal-controlled road network. Transp. Res. B 1997, 31, 397–402. [Google Scholar] [CrossRef]
- Chiou, S.-W. Optimization of area traffic control for equilibrium network flows. Transp. Sci. 1999, 33, 279–289. [Google Scholar] [CrossRef]
- Ziyou, G.; Yifan, S. A reserve capacity model of optimal signal control with user-equilibrium route choice. Transp. Res. B 2002, 36, 313–323. [Google Scholar] [CrossRef]
- Heydecker, B.G. A decomposition approach for signal optimisation in road networks. Transp. Res. B 1996, 30, 99–114. [Google Scholar] [CrossRef]
- Pillai, R.S.; Rathi, A.K.; Cohen, S.L. A restricted branch and bound approach for generating maximum bandwidth signal timing plans for traffic networks. Transp. Res. B 1998, 32, 517–529. [Google Scholar] [CrossRef]
- Wey, W.-M. Model formulation and solution algorithm of traffic signal control in an urban network. Comput. Environ. Urban Syst. 2000, 24, 355–377. [Google Scholar] [CrossRef]
- Wong, S.C. Group-based optimisation of signal timings using parallel computing. Transp. Res. C 1997, 5, 123–139. [Google Scholar] [CrossRef]
- Wong, S.C.; Wong, W.T.; Leung, C.M.; Tong, C.O. Group-based optimization of a time-dependent TRANSYT traffic model for area traffic control. Transp. Res. B 2002, 36, 291–312. [Google Scholar] [CrossRef]
- Smith, M.J.; Xiang, Y.; Yarrow, R. Bilevel optimisation of signal timings and road prices on urban road networks. In Proceedings of the 8th Ifac Symposium on Transportation Systems, Chania, Greece, 16–18 June 1997. [Google Scholar]
- Abu-Lebdeh, G.; Benekohal, R.F. Design and evaluation of dynamic traffic management strategies for congested conditions. Transp. Res. A 2003, 37, 109–127. [Google Scholar] [CrossRef]
- Saraf, R.K. Adaptive Traffic Control Using Neural Networks. Ph.D. Dissertation, Vanderbilt University, Nashville, TN, USA, 1994. [Google Scholar]
- Spall, J.C.; Chin, D.C. Traffic-responsive signal timing for system-wide traffic control. Transp. Res. C 1997, 5, 153–163. [Google Scholar] [CrossRef]
- Lee, S.; Hazelton, H. Stochastic optimization of combined traffic assignment and signal control junction modelling. In Proceedings of the 13th International Symposium on Transportation and Traffic Theory, Lyon, France, 24–26 July 1996; pp. 713–735. [Google Scholar]
- Al-Sharman, M.; Dempster, R.; Daoud, M.A.; Nasr, M.; Raydide, D. Self-Learned Autonomous Driving at Unsignalized Intersections: A Hierarchical Reinforced Learning Approach for Feasible Decision-Making. IEEE Trans. Intell. Transp. Syst. 2023, 24, 12345–12356. [Google Scholar] [CrossRef]
- SAE Standard J3016_202104. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. SAE International Recommended Practice: Warrendale, PA, USA, Revised April 2021, Issued January 2014. 2021. [CrossRef]
- Di, X.; Shi, R. A survey on autonomous vehicle control in the era of mixed-autonomy: From physics-based to AI-guided driving policy learning. Transp. Res. C 2021, 125, 103008. [Google Scholar] [CrossRef]
- Zhao, C.; Li, L.; Pei, X.; Li, Z.; Wang, F.-Y.; Wu, X. A comparative study of state-of-the-art driving strategies for autonomous vehicles. Accid. Anal. Prev. 2021, 150, 105937. [Google Scholar] [CrossRef] [PubMed]
- Makahleh, H.Y.; Ferranti, E.J.S.; Dissanayake, D. Assessing the Role of Autonomous Vehicles in Urban Areas: A Systematic Review of Literature. Future Transp. 2024, 4, 321–348. [Google Scholar] [CrossRef]
- D’Emidio, M.; Delfaraz, E.; Di Stefano, G.; Frittella, G.; Vittoria, E. Route Planning Algorithms for Fleets of Connected Vehicles: State of the Art, Implementation, and Deployment. Appl. Sci. 2024, 14, 2884. [Google Scholar] [CrossRef]
- Kassens-Noor, E.; Dake, D.; Decaminada, T.; Kotval-K, Z.; Qu, T.; Wilson, M.; Pentland, B. Sociomobility of the 21st century: Autonomous vehicles, planning, and the future city. Transp. Policy 2020, 99, 329–335. [Google Scholar] [CrossRef]
- Liu, W.; Hua, M.; Deng, Z.; Meng, Z.; Huang, Y.; Hu, C.; Song, S.; Gao, L.; Liu, C.; Shuai, B.; et al. Systematic Survey of Control Techniques and Applications in Connected and Automated Vehicles. IEEE Internet Things J. 2023, 10, 21892–21916. [Google Scholar] [CrossRef]
- Negash, N.M.; Yang, J. Driver Behavior Modeling toward Autonomous Vehicles: Comprehensive Review. IEEE Access 2023, 11, 22788–22821. [Google Scholar] [CrossRef]
- Patella, S.M.; Scrucca, F.; Asdrubali, F.; Carrese, S. Carbon Footprint of autonomous vehicles at the urban mobility system level: A traffic simulation-based approach. Transp. Res. D 2019, 74, 189–200. [Google Scholar] [CrossRef]
- Ercan, T.; Onat, N.C.; Kaya, N.; Tatari, N.; Eluru, N.; Kucukvar, M. Autonomous electric vehicles can reduce carbon emissions and air pollution in cities. Transp. Res. D 2022, 112, 103472. [Google Scholar] [CrossRef]
- Silva, O.; Cordera, R.; Gonzalez-Gonzalez, E.; Nogues, S. Environmental impacts of autonomous vehicles: A review of the scientific literature. Sci. Total Environ. 2022, 830, 154615. [Google Scholar] [CrossRef]
- Hasan, M.H.; Van Hentenryck, P. The benefits of autonomous vehicles for community-based trip sharing. Transp. Res. C 2021, 124, 102929. [Google Scholar] [CrossRef]
- Carrese, S.; Nigro, M.; Patella, S.M.; Toniolo, E. A preliminary study of the potential impact of autonomous vehicles on residential location in Rome. Res. Transp. Econ. 2019, 75, 55–61. [Google Scholar] [CrossRef]
- Moore, M.A.; Lavieri, P.S.; Dias, F.F.; Bhat, C.R. On investigating the potential effects of private autonomous vehicle use on home/work relocations and commute times. Transp. Res. Part C 2020, 110, 166–185. [Google Scholar] [CrossRef]
- May, A.D.; Shepherd, S.; Pfaffenbichler, P.; Emberger, G. The potential impacts of automated cars on urban transport: An exploratory analysis. Transp. Policy 2020, 98, 127–138. [Google Scholar] [CrossRef]
- Harrison, G.; Stanford, J.; Rakoff, H.; Smith, S.; Shepherd, S.; Barnard, Y.; Innamaa, S. Assessing the influence of connected and automated mobility on the liveability of cities. J. Urban Mobil. 2022, 2, 100034. [Google Scholar] [CrossRef]
- Rashidi, T.H.; Waller, T.; Axhausen, K. Reduced value of time for autonomous vehicle users: Myth or reality? Transp. Policy 2020, 95, 30–36. [Google Scholar] [CrossRef]
- Tian, Z.; Feng, T.; Timmermans, H.J.P.; Yao, B. Using autonomous vehicles or shared cars? Results of a stated choice experiment. Transp. Res. C 2021, 128, 103117. [Google Scholar] [CrossRef]
- Wang, Y.; Cai, P.; Lu, G. Cooperative autonomous traffic organization method for connected automated vehicles in multi-intersection road networks. Transp. Res. C 2020, 111, 458–476. [Google Scholar] [CrossRef]
- Sun, W.; Wang, S.; Shao, Y.; Sun, Z.; Levin, M.W. Energy and mobility impacts of connected autonomous vehicles with co-optimization of speed and powertrain on mixed vehicle platoons. Transp. Res. C 2022, 142, 103764. [Google Scholar] [CrossRef]
- Zhang, Y.; Ai, Z.; Chen, J.; You, T.; Du, C.; Deng, L. Energy-Saving Optimization and Control of Autonomous Electric Vehicles with Considering Multiconstraints. IEEE Trans. Cybern. 2022, 52, 10869–10881. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Kim, Y.; Kahng, H.; Lee, S.-K.; Chung, S.; Cheong, T.; Shin, K.; Park, J.; Kim, S.B. Intelligent traffic control for autonomous vehicle systems based on machine learning. Expert Syst. Appl. 2020, 144, 113074. [Google Scholar] [CrossRef]
- Rey, D.; Levin, M.W. Blue phase: Optimal network traffic control for legacy and autonomous vehicles. Transp. Res. B 2019, 130, 105–129. [Google Scholar] [CrossRef]
- Lazar, D.A.; Biyik, E.; Sadigh, D.; Pedarsani, R. Learning how to dynamically route autonomous vehicles on shared roads. Transp. Res. C 2021, 130, 103258. [Google Scholar] [CrossRef]
- Wang, J.; Wang, W.; Ren, G.; Yang, M. Worst-case traffic assignment model for mixed traffic flow of human-driven vehicles and connected and autonomous vehicles by factoring in the uncertain link capacity. Transp. Res. C 2022, 140, 103703. [Google Scholar] [CrossRef]
- Guo, Z.; Wang, D.Z.W.; Wang, D. Managing mixed traffic with autonomous vehicles—A day-to-day routing allocation scheme. Transp. Res. C 2022, 140, 103726. [Google Scholar] [CrossRef]
- Chen, B.; Sun, D.; Zhou, J.; Wong, W.; Ding, Z. A future intelligent traffic system with mixed autonomous vehicles and human-driven vehicles. Inf. Sci. 2020, 529, 59–72. [Google Scholar] [CrossRef]
- Németh, B.; Bede, Z.; Gaspar, P. Control strategy for the optimization of mixed traffic flow with autonomous vehicles. IFAC Pap. 2019, 52, 227–232. [Google Scholar] [CrossRef]
- Wang, J.; Peeta, S.; He, X. Multiclass traffic assignment model for mixed traffic flow of human-driven vehicles and connected and autonomous vehicles. Transp. Res. B 2019, 126, 139–168. [Google Scholar] [CrossRef]
- Santana, E.F.Z.; Covas, G.; Duarte, F.; Santi, P.; Ratti, C.; Kon, F. Transitioning to a driverless city: Evaluating a hybrid system for autonomous and non-autonomous vehicles. Simul. Model. Pract. Theory 2021, 107, 102210. [Google Scholar] [CrossRef]
- Ding, H.; Pan, H.; Bai, H.; Zheng, X.; Chen, J. Driving strategy of connected and autonomous vehicles based on multiple preceding vehicles state estimation in mixed vehicular traffic. Phys. A 2022, 596, 127154. [Google Scholar] [CrossRef]
- Zhu, L.; Lu, L.; Wang, X.; Jiang, C.; Ye, N. Operational Characteristics of Mixed-Autonomy Traffic Flow on the Freeway with On- and Off-Ramps and Weaving Sections: An RL-Based Approach. IEEE Trans. Intell. Transp. Syst. 2022, 23, 13512–13525. [Google Scholar] [CrossRef]
- Guo, H.; Chen, Y.; Liu, Y. Shared autonomous vehicle management considering competition with human-driven private vehicles. Transp. Res. C 2022, 136, 103547. [Google Scholar] [CrossRef]
- Narayanan, S.; Chaniotakis, E.; Antoniou, C. Modelling reservation-based shared autonomous vehicle services: A dynamic user equilibrium approach. Transp. Res. C 2022, 140, 103651. [Google Scholar] [CrossRef]
- Levy, R.; Haddad, J. Cooperative path and trajectory planning for autonomous vehicles on roads without lanes: A laboratory experimental demonstration. Transp. Res. C 2022, 144, 103813. [Google Scholar] [CrossRef]
- Wu, L.; Cao, S.; Chen, Y.; Li, J.; Cui, J.; Chang, Y. A cooperative mobility model for multiple autonomous vehicles. Comput. Commun. 2022, 195, 148–161. [Google Scholar] [CrossRef]
- Mahmoud, Y.H.; Brown, N.E.; Motallebiaraghi, F.; Koelling, M.; Meyer, R.; Asher, Z.D.; Dontchev, A.; Kolmanovsky, I. Autonomous eco-driving with traffic light and lead vehicle constraints: An application of best constrained interpolation. IFAC-PapersOnLine 2021, 54, 45–50. [Google Scholar] [CrossRef]
- Sun, P.; Nam, D.; Jayakrishnan, R.; Jin, W. An eco-driving algorithm based on vehicle to infrastructure (V2I) communications for signalized intersections. Transp. Res. C 2022, 144, 103876. [Google Scholar] [CrossRef]
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. C 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Tettamanti, T.; Mohammadi, A.; Asadi, H.; Varga, I. A two-level urban traffic control for autonomous vehicles to improve network-wide performance. Transp. Res. Procedia 2017, 27, 913–920. [Google Scholar] [CrossRef]
- Stern, R.E.; Chen, Y.; Churchill, M.; Wu, F.; Delle Monache, M.L.; Piccoli, B.; Seibold, B.; Sprinkle, J.; Work, D.B. Quantifying air quality benefits resulting from few autonomous vehicles stabilizing traffic. Transp. Res. D 2019, 67, 351–365. [Google Scholar] [CrossRef]
- Miglani, A.; Kumar, N. Deep learning models for traffic flow prediction in autonomous vehicles: A review, solutions, and challenges. Veh. Commun. 2019, 20, 100184. [Google Scholar] [CrossRef]
- Liard, T.; Stern, R.; Delle Monache, M.L. Optimal driving strategies for traffic control with autonomous vehicles. IFAC-PapersOnLine 2020, 53, 5322–5329. [Google Scholar] [CrossRef]
- Kumakoshi, Y.; Hanabusa, H.; Oguchi, T. Impacts of shared autonomous vehicles: Tradeoff between parking demand reduction and congestion increase. Transp. Res. Interdiscip. Perspect. 2021, 12, 100482. [Google Scholar] [CrossRef]
- Zhao, C.; Liao, F.; Li, X.; Du, Y. Macroscopic modeling and dynamic control of on-street cruising-for-parking of autonomous vehicles in a multi-region urban road network. Transp. Res. C 2021, 128, 103176. [Google Scholar] [CrossRef]
- Ge, Q.; Han, K.; Liu, X. Matching and routing for shared autonomous vehicles in congestible network. Transp. Res. E 2021, 156, 102513. [Google Scholar] [CrossRef]
- Cantarella, G.E. A general fixed-point approach to multimode multi-user equilibrium assignment with elastic demand. Transp. Sci. 1997, 31, 107–128. [Google Scholar] [CrossRef]
- Cascetta, E. Transportation Systems Engineering: Theory and Methods; Kluwer Academic Publishers: Dordrecht, The Nederlands, 2001. [Google Scholar]
- Gallo, M.; D’Acierno, L.; Montella, B. Global Optimisation of Signal Settings: Meta-heuristic algorithms for solving real-scale problems. In Computer-Based Modelling and Optimization in Transportation; de Sousa, J.F., Rossi, R., Eds.; Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2014; Volume 262, pp. 177–193. [Google Scholar]
- National Academies of Sciences, Engineering, and Medicine. Highway Capacity Manual 7th Edition: A Guide for Multimodal Mobility Analysis; The National Academies Press: Washington, DC, USA, 2022. [Google Scholar]
- Morlok, E.K.; Schofer, J.L.; Pierskalla, W.P.; Marsten, R.E.; Agarwal, S.K.; Stoner, J.W.; Edwards, J.L.; LeBlanc, L.J.; Spacek, D.T. Development and Application of a Highway Network Design Model, Volumes 1 and 2. Final Report: FHWA Contract Number DOT-PH-11-7862; Northwestern University: Evanston, IL, USA, 1973. [Google Scholar]
- Suwansirikul, C.; Friesz, T.L.; Tobin, R.L. Equilibrium decomposed optimization: A heuristic for the continuous equilibrium network design problem. Transp. Sci. 1987, 40, 540–542. [Google Scholar] [CrossRef]
- Dial, R.B. A Probabilistic Multipath Traffic Assignment Model Which Obviates Path Enumeration. Transp. Res. 1971, 5, 83–111. [Google Scholar] [CrossRef]



| Solution | μ | ψ1 | Objective Function [s] |
|---|---|---|---|
| 1 | 0.8 | 1.00 | 78,649 |
| 2 | 0.2 | 0.01 | 86,121 |
| Demand | Optimal Local Solutions | μ | ψ1 | Objective Function [s] |
|---|---|---|---|---|
| 200 | 1 | 0.80 | 1.00 | 18,448 |
| 2 | 0.20 | 0.00 | 20,248 | |
| 400 | 1 | 0.80 | 1.00 | 37,206 |
| 2 | 0.20 | 0.00 | 40,815 | |
| 600 | 1 | 0.80 | 1.00 | 56,822 |
| 2 | 0.20 | 0.00 | 62,289 | |
| 800 | 1 | 0.80 | 1.00 | 78,649 |
| 2 | 0.20 | 0.01 | 86,121 | |
| 1000 | 1 | 0.80 | 1.00 | 105,400 |
| 2 | 0.20 | 0.12 | 113,747 | |
| 1200 | 1 | 0.80 | 0.88 | 138,782 |
| 2 | 0.20 | 0.17 | 147,416 | |
| 1400 | 1 | 0.83 | 0.80 | 182,350 |
| 2 | 0.20 | 0.18 | 192,239 | |
| 1600 | 1 | 0.81 | 0.80 | 247,582 |
| 2 | - | - | - |
| Variable | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| μ1_start | 0.50 | 0.20 | 0.80 | 0.50 | 0.50 | 0.20 | 0.20 | 0.80 | 0.80 | 0.20 | 0.80 | 0.20 |
| μ2_start | 0.50 | 0.20 | 0.80 | 0.50 | 0.50 | 0.20 | 0.20 | 0.80 | 0.80 | 0.80 | 0.20 | 0.80 |
| μ3_start | 0.50 | 0.20 | 0.80 | 0.50 | 0.50 | 0.20 | 0.20 | 0.80 | 0.80 | 0.20 | 0.80 | 0.20 |
| μ4_start | 0.50 | 0.20 | 0.80 | 0.50 | 0.50 | 0.20 | 0.20 | 0.80 | 0.80 | 0.80 | 0.20 | 0.80 |
| C1_start | 75.0 | 75.0 | 75.0 | 30.0 | 120.0 | 30.0 | 120.0 | 30.0 | 120.0 | 75.0 | 75.0 | 30.0 |
| C2_start | 75.0 | 75.0 | 75.0 | 30.0 | 120.0 | 30.0 | 120.0 | 30.0 | 120.0 | 75.0 | 75.0 | 30.0 |
| C3_start | 75.0 | 75.0 | 75.0 | 30.0 | 120.0 | 30.0 | 120.0 | 30.0 | 120.0 | 75.0 | 75.0 | 30.0 |
| C4_start | 75.0 | 75.0 | 75.0 | 30.0 | 120.0 | 30.0 | 120.0 | 30.0 | 120.0 | 75.0 | 75.0 | 30.0 |
| All ψk,od | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 |
| Results | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| μ1_opt | 0.20 | 0.20 | 0.20 | 0.37 | 0.37 | 0.20 | 0.37 | 0.20 | 0.37 | 0.20 | 0.20 | 0.20 |
| μ2_opt | 0.23 | 0.23 | 0.23 | 0.20 | 0.37 | 0.21 | 0.37 | 0.25 | 0.37 | 0.22 | 0.23 | 0.24 |
| μ3_opt | 0.20 | 0.20 | 0.50 | 0.80 | 0.37 | 0.80 | 0.37 | 0.80 | 0.37 | 0.20 | 0.20 | 0.80 |
| μ4_opt | 0.20 | 0.20 | 0.20 | 0.20 | 0.48 | 0.20 | 0.52 | 0.26 | 0.52 | 0.20 | 0.20 | 0.20 |
| C1_opt | 94.7 | 94.6 | 94.8 | 120.0 | 120.0 | 94.7 | 120.0 | 94.7 | 120.0 | 94.7 | 94.7 | 94.7 |
| C2_opt | 98.6 | 98.6 | 98.8 | 94.9 | 120.0 | 95.6 | 120.0 | 101.1 | 120.0 | 97.6 | 98.5 | 99.9 |
| C3_opt | 74.9 | 74.9 | 51.8 | 30.0 | 120.0 | 30.0 | 120.0 | 30.0 | 120.0 | 74.9 | 81.3 | 30.0 |
| C4_opt | 94.7 | 94.6 | 94.7 | 94.7 | 120.0 | 94.3 | 120.0 | 101.7 | 120.0 | 94.7 | 94.7 | 94.5 |
| ψ1_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| ψ2_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| ψ3_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| ψ4_opt | 0.447 | 0.447 | 0.447 | 0.447 | 0.389 | 0.447 | 0.389 | 0.447 | 0.389 | 0.447 | 0.447 | 0.447 |
| ψ5_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| ψ6_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| ψ7_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.018 | 0.000 | 0.018 | 0.000 | 0.018 | 0.000 | 0.000 | 0.000 |
| ψ8_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.514 | 0.000 | 0.514 | 0.000 | 0.514 | 0.000 | 0.000 | 0.000 |
| ψ9_opt | 0.553 | 0.553 | 0.553 | 0.553 | 0.079 | 0.553 | 0.079 | 0.553 | 0.079 | 0.553 | 0.553 | 0.553 |
| Objective function [s] | 174,924 | 174,924 | 174,924 | 174,924 | 171,424 | 174924.3 | 171,424 | 174,924 | 171,424 | 174,924 | 174,924 | 174,924 |
| Solution | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_2 | Sol_1 | Sol_2 | Sol_1 | Sol_2 | Sol_1 | Sol_1 | Sol_1 |
| Variable | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | |
| μ1_start | 0.80 | 0.20 | 0.80 | 0.73 | 0.38 | 0.40 | 0.57 | 0.33 | 0.39 | 0.68 | 0.78 | |
| μ2_start | 0.20 | 0.80 | 0.20 | 0.42 | 0.57 | 0.66 | 0.28 | 0.57 | 0.36 | 0.55 | 0.27 | |
| μ3_start | 0.80 | 0.20 | 0.80 | 0.30 | 0.69 | 0.49 | 0.73 | 0.53 | 0.65 | 0.76 | 0.26 | |
| μ4_start | 0.20 | 0.80 | 0.20 | 0.60 | 0.44 | 0.24 | 0.57 | 0.34 | 0.24 | 0.64 | 0.51 | |
| C1_start | 30.0 | 120.0 | 120.0 | 59.0 | 120.0 | 59.0 | 80.0 | 50.0 | 66.0 | 98.0 | 37.0 | |
| C2_start | 30.0 | 120.0 | 120.0 | 66.0 | 108.0 | 62.0 | 114.0 | 77.0 | 95.0 | 46.0 | 108.0 | |
| C3_start | 30.0 | 120.0 | 120.0 | 104.0 | 42.0 | 67.0 | 40.0 | 88.0 | 95.0 | 72.0 | 120.0 | |
| C4_start | 30.0 | 120.0 | 120.0 | 102.0 | 67.0 | 112.0 | 95.0 | 59.0 | 106.0 | 43.0 | 106.0 | |
| All ψk,od | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | |
| Results | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | |
| μ1_opt | 0.20 | 0.37 | 0.37 | 0.63 | 0.37 | 0.20 | 0.20 | 0.20 | 0.22 | 0.25 | 0.74 | |
| μ2_opt | 0.20 | 0.37 | 0.37 | 0.20 | 0.30 | 0.23 | 0.33 | 0.30 | 0.20 | 0.20 | 0.37 | |
| μ3_opt | 0.80 | 0.37 | 0.38 | 0.37 | 0.40 | 0.31 | 0.64 | 0.20 | 0.54 | 0.80 | 0.37 | |
| μ4_opt | 0.20 | 0.52 | 0.52 | 0.53 | 0.20 | 0.52 | 0.24 | 0.20 | 0.52 | 0.20 | 0.53 | |
| C1_opt | 94.9 | 120.0 | 120.0 | 120.0 | 120.0 | 94.8 | 94.7 | 94.7 | 97.2 | 101.2 | 101.6 | |
| C2_opt | 94.4 | 120.0 | 120.0 | 95.1 | 108.0 | 98.7 | 114.0 | 108.6 | 95.0 | 94.9 | 120.0 | |
| C3_opt | 30.0 | 120.0 | 120.0 | 120.0 | 42.0 | 67.0 | 40.0 | 87.9 | 95.0 | 72.0 | 120.0 | |
| C4_opt | 93.8 | 120.0 | 120.0 | 120.0 | 94.7 | 120.0 | 99.4 | 94.6 | 120.0 | 94.7 | 120.0 | |
| ψ1_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| ψ2_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| ψ3_opt | 0.000 | 0.000 | 0.000 | 0.398 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.398 | |
| ψ4_opt | 0.447 | 0.389 | 0.389 | 0.000 | 0.447 | 0.401 | 0.447 | 0.447 | 0.401 | 0.447 | 0.000 | |
| ψ5_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| ψ6_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| ψ7_opt | 0.000 | 0.018 | 0.018 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| ψ8_opt | 0.000 | 0.514 | 0.514 | 0.517 | 0.000 | 0.516 | 0.000 | 0.000 | 0.516 | 0.000 | 0.517 | |
| ψ9_opt | 0.553 | 0.079 | 0.079 | 0.085 | 0.553 | 0.083 | 0.553 | 0.553 | 0.083 | 0.553 | 0.085 | |
| Objective function [s] | 174,927 | 171,424 | 171,424 | 171,58 | 174,924 | 171,432 | 174,924 | 174,924 | 171,432 | 174,924 | 171,58 | |
| Solution | Sol_1 | Sol_2 | Sol_2 | Sol_3 | Sol_1 | Sol_4 | Sol_1 | Sol_1 | Sol_4 | Sol_1 | Sol_3 |
| Variable | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| μ1_start | 0.50 | 0.20 | 0.80 | 0.50 | 0.50 | 0.20 | 0.20 | 0.80 | 0.80 | 0.20 | 0.80 | 0.20 |
| μ2_start | 0.50 | 0.20 | 0.80 | 0.50 | 0.50 | 0.20 | 0.20 | 0.80 | 0.80 | 0.80 | 0.20 | 0.80 |
| μ3_start | 0.50 | 0.20 | 0.80 | 0.50 | 0.50 | 0.20 | 0.20 | 0.80 | 0.80 | 0.20 | 0.80 | 0.20 |
| μ4_start | 0.50 | 0.20 | 0.80 | 0.50 | 0.50 | 0.20 | 0.20 | 0.80 | 0.80 | 0.80 | 0.20 | 0.80 |
| C1_start | 75.0 | 75.0 | 75.0 | 30.0 | 120.0 | 30.0 | 120.0 | 30.0 | 120.0 | 75.0 | 75.0 | 30.0 |
| C2_start | 75.0 | 75.0 | 75.0 | 30.0 | 120.0 | 30.0 | 120.0 | 30.0 | 120.0 | 75.0 | 75.0 | 30.0 |
| C3_start | 75.0 | 75.0 | 75.0 | 30.0 | 120.0 | 30.0 | 120.0 | 30.0 | 120.0 | 75.0 | 75.0 | 30.0 |
| C4_start | 75.0 | 75.0 | 75.0 | 30.0 | 120.0 | 30.0 | 120.0 | 30.0 | 120.0 | 75.0 | 75.0 | 30.0 |
| All ψk,od | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 |
| Results | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| μ1_opt | 0.22 | 0.46 | 0.49 | 0.20 | 0.47 | 0.36 | 0.47 | 0.47 | 0.47 | 0.22 | 0.47 | 0.20 |
| μ2_opt | 0.40 | 0.38 | 0.20 | 0.24 | 0.37 | 0.21 | 0.37 | 0.37 | 0.37 | 0.40 | 0.37 | 0.36 |
| μ3_opt | 0.20 | 0.20 | 0.23 | 0.80 | 0.37 | 0.80 | 0.37 | 0.20 | 0.37 | 0.20 | 0.23 | 0.80 |
| μ4_opt | 0.20 | 0.21 | 0.43 | 0.44 | 0.42 | 0.44 | 0.42 | 0.42 | 0.42 | 0.21 | 0.42 | 0.44 |
| C1_opt | 97.7 | 120.0 | 120.0 | 95.3 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 97.3 | 120.0 | 95.5 |
| C2_opt | 120.0 | 120.0 | 95.8 | 100.2 | 120.0 | 96.8 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 |
| C3_opt | 94.0 | 94.6 | 98.1 | 30.0 | 120.0 | 30.0 | 120.0 | 94.4 | 120.0 | 94.1 | 98.5 | 30.0 |
| C4_opt | 95.6 | 97.2 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 97.0 | 120.0 | 120.0 |
| ψ1_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| ψ2_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| ψ3_opt | 0.000 | 0.176 | 0.226 | 0.000 | 0.184 | 0.000 | 0.184 | 0.184 | 0.184 | 0.000 | 0.184 | 0.000 |
| ψ4_opt | 0.381 | 0.273 | 0.258 | 0.453 | 0.266 | 0.453 | 0.266 | 0.266 | 0.266 | 0.381 | 0.266 | 0.453 |
| ψ5_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| ψ6_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| ψ7_opt | 0.134 | 0.064 | 0.000 | 0.000 | 0.044 | 0.000 | 0.044 | 0.044 | 0.044 | 0.134 | 0.044 | 0.000 |
| ψ8_opt | 0.000 | 0.003 | 0.225 | 0.251 | 0.218 | 0.251 | 0.218 | 0.218 | 0.218 | 0.000 | 0.218 | 0.251 |
| ψ9_opt | 0.485 | 0.484 | 0.290 | 0.296 | 0.289 | 0.296 | 0.289 | 0.289 | 0.289 | 0.485 | 0.289 | 0.296 |
| Objective function [s] | 305,748 | 304,681 | 302,758 | 305,958 | 302,564 | 305,958 | 302,564 | 302,564 | 302,564 | 305,748 | 302,564 | 305,958 |
| Solution | Sol_1 | Sol_2 | Sol_3 | Sol_4 | Sol_5 | Sol_4 | Sol_5 | Sol_5 | Sol_5 | Sol_1 | Sol_5 | Sol_4 |
| Variable | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | |
| μ1_start | 0.80 | 0.20 | 0.80 | 0.73 | 0.38 | 0.40 | 0.57 | 0.33 | 0.39 | 0.68 | 0.78 | |
| μ2_start | 0.20 | 0.80 | 0.20 | 0.42 | 0.57 | 0.66 | 0.28 | 0.57 | 0.36 | 0.55 | 0.27 | |
| μ3_start | 0.80 | 0.20 | 0.80 | 0.30 | 0.69 | 0.49 | 0.73 | 0.53 | 0.65 | 0.76 | 0.26 | |
| μ4_start | 0.20 | 0.80 | 0.20 | 0.60 | 0.44 | 0.24 | 0.57 | 0.34 | 0.24 | 0.64 | 0.51 | |
| C1_start | 30.0 | 120.0 | 120.0 | 59.0 | 120.0 | 59.0 | 80.0 | 50.0 | 66.0 | 98.0 | 37.0 | |
| C2_start | 30.0 | 120.0 | 120.0 | 66.0 | 108.0 | 62.0 | 114.0 | 77.0 | 95.0 | 46.0 | 108.0 | |
| C3_start | 30.0 | 120.0 | 120.0 | 104.0 | 42.0 | 67.0 | 40.0 | 88.0 | 95.0 | 72.0 | 120.0 | |
| C4_start | 30.0 | 120.0 | 120.0 | 102.0 | 67.0 | 112.0 | 95.0 | 59.0 | 106.0 | 43.0 | 106.0 | |
| All ψk,od | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | |
| Results | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | |
| μ1_opt | 0.20 | 0.47 | 0.47 | 0.47 | 0.47 | 0.47 | 0.21 | 0.22 | 0.22 | 0.47 | 0.47 | |
| μ2_opt | 0.20 | 0.37 | 0.37 | 0.37 | 0.37 | 0.37 | 0.39 | 0.40 | 0.39 | 0.37 | 0.37 | |
| μ3_opt | 0.80 | 0.37 | 0.37 | 0.27 | 0.24 | 0.26 | 0.26 | 0.20 | 0.21 | 0.37 | 0.37 | |
| μ4_opt | 0.44 | 0.42 | 0.42 | 0.42 | 0.42 | 0.42 | 0.42 | 0.20 | 0.42 | 0.42 | 0.42 | |
| C1_opt | 95.3 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 96.6 | 96.9 | 96.9 | 120.0 | 120.0 | |
| C2_opt | 95.7 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | |
| C3_opt | 30.0 | 120.0 | 120.0 | 103.9 | 99.9 | 102.7 | 101.2 | 94.1 | 95.5 | 120.0 | 120.0 | |
| C4_opt | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 96.1 | 120.0 | 120.0 | 120.0 | |
| ψ1_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| ψ2_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| ψ3_opt | 0.000 | 0.184 | 0.184 | 0.184 | 0.184 | 0.184 | 0.000 | 0.000 | 0.000 | 0.184 | 0.184 | |
| ψ4_opt | 0.453 | 0.266 | 0.266 | 0.266 | 0.266 | 0.266 | 0.380 | 0.381 | 0.380 | 0.266 | 0.266 | |
| ψ5_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| ψ6_opt | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| ψ7_opt | 0.000 | 0.044 | 0.044 | 0.044 | 0.044 | 0.044 | 0.114 | 0.134 | 0.114 | 0.044 | 0.044 | |
| ψ8_opt | 0.251 | 0.218 | 0.218 | 0.218 | 0.218 | 0.218 | 0.217 | 0.000 | 0.217 | 0.218 | 0.218 | |
| ψ9_opt | 0.296 | 0.289 | 0.289 | 0.289 | 0.289 | 0.289 | 0.289 | 0.485 | 0.289 | 0.289 | 0.289 | |
| Objective function [s] | 305,958 | 302,564 | 302,564 | 302,564 | 302,564 | 302,564 | 303,662 | 305,748 | 303,662 | 302,564 | 302,564 | |
| Solution | Sol_4 | Sol_5 | Sol_5 | Sol_5 | Sol_5 | Sol_5 | Sol_6 | Sol_1 | Sol_6 | Sol_5 | Sol_5 |
| Variable | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| μ1_start | 0.50 | 0.20 | 0.80 | 0.50 | 0.50 | 0.20 | 0.20 | 0.80 | 0.80 | 0.20 | 0.80 | 0.20 |
| μ2_start | 0.50 | 0.20 | 0.80 | 0.50 | 0.50 | 0.20 | 0.20 | 0.80 | 0.80 | 0.80 | 0.20 | 0.80 |
| μ3_start | 0.50 | 0.20 | 0.80 | 0.50 | 0.50 | 0.20 | 0.20 | 0.80 | 0.80 | 0.20 | 0.80 | 0.20 |
| μ4_start | 0.50 | 0.20 | 0.80 | 0.50 | 0.50 | 0.20 | 0.20 | 0.80 | 0.80 | 0.80 | 0.20 | 0.80 |
| C1_start | 75.0 | 75.0 | 75.0 | 30.0 | 120.0 | 30.0 | 120.0 | 30.0 | 120.0 | 75.0 | 75.0 | 30.0 |
| C2_start | 75.0 | 75.0 | 75.0 | 30.0 | 120.0 | 30.0 | 120.0 | 30.0 | 120.0 | 75.0 | 75.0 | 30.0 |
| C3_start | 75.0 | 75.0 | 75.0 | 30.0 | 120.0 | 30.0 | 120.0 | 30.0 | 120.0 | 75.0 | 75.0 | 30.0 |
| C4_start | 75.0 | 75.0 | 75.0 | 30.0 | 120.0 | 30.0 | 120.0 | 30.0 | 120.0 | 75.0 | 75.0 | 30.0 |
| All ψk,od | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 |
| Results | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| μ1_opt | 0.48 | 0.48 | 0.48 | 0.48 | 0.48 | 0.48 | 0.48 | 0.48 | 0.48 | 0.48 | 0.48 | 0.48 |
| μ2_opt | 0.41 | 0.41 | 0.41 | 0.41 | 0.41 | 0.41 | 0.41 | 0.41 | 0.41 | 0.41 | 0.41 | 0.41 |
| μ3_opt | 0.54 | 0.54 | 0.54 | 0.54 | 0.54 | 0.54 | 0.54 | 0.54 | 0.54 | 0.54 | 0.54 | 0.54 |
| μ4_opt | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 |
| C1_opt | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 |
| C2_opt | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 |
| C3_opt | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 |
| C4_opt | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 |
| ψ1_opt | 0.085 | 0.071 | 0.101 | 0.081 | 0.071 | 0.054 | 0.034 | 0.071 | 0.059 | 0.074 | 0.071 | 0.071 |
| ψ2_opt | 0.071 | 0.064 | 0.027 | 0.060 | 0.063 | 0.044 | 0.099 | 0.063 | 0.067 | 0.060 | 0.063 | 0.063 |
| ψ3_opt | 0.054 | 0.074 | 0.082 | 0.068 | 0.076 | 0.112 | 0.076 | 0.076 | 0.083 | 0.076 | 0.076 | 0.076 |
| ψ4_opt | 0.250 | 0.250 | 0.250 | 0.250 | 0.250 | 0.250 | 0.250 | 0.250 | 0.250 | 0.250 | 0.250 | 0.250 |
| ψ5_opt | 0.018 | 0.047 | 0.016 | 0.060 | 0.051 | 0.100 | 0.031 | 0.050 | 0.041 | 0.047 | 0.051 | 0.050 |
| ψ6_opt | 0.041 | 0.032 | 0.070 | 0.012 | 0.030 | 0.017 | 0.050 | 0.031 | 0.047 | 0.033 | 0.030 | 0.030 |
| ψ7_opt | 0.085 | 0.064 | 0.057 | 0.070 | 0.062 | 0.027 | 0.062 | 0.063 | 0.055 | 0.063 | 0.062 | 0.063 |
| ψ8_opt | 0.126 | 0.111 | 0.111 | 0.087 | 0.107 | 0.075 | 0.163 | 0.108 | 0.128 | 0.107 | 0.107 | 0.108 |
| ψ9_opt | 0.271 | 0.286 | 0.286 | 0.310 | 0.290 | 0.322 | 0.234 | 0.289 | 0.269 | 0.290 | 0.290 | 0.289 |
| Objective function [s] | 536,318 | 536,318 | 536,318 | 536,318 | 536,318 | 536,318 | 536,318 | 536,318 | 536,318 | 536,318 | 536,318 | 536,318 |
| Solution | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_1 |
| Variable | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | |
| μ1_start | 0.80 | 0.20 | 0.80 | 0.73 | 0.38 | 0.40 | 0.57 | 0.33 | 0.39 | 0.68 | 0.78 | |
| μ2_start | 0.20 | 0.80 | 0.20 | 0.42 | 0.57 | 0.66 | 0.28 | 0.57 | 0.36 | 0.55 | 0.27 | |
| μ3_start | 0.80 | 0.20 | 0.80 | 0.30 | 0.69 | 0.49 | 0.73 | 0.53 | 0.65 | 0.76 | 0.26 | |
| μ4_start | 0.20 | 0.80 | 0.20 | 0.60 | 0.44 | 0.24 | 0.57 | 0.34 | 0.24 | 0.64 | 0.51 | |
| C1_start | 30.0 | 120.0 | 120.0 | 59.0 | 120.0 | 59.0 | 80.0 | 50.0 | 66.0 | 98.0 | 37.0 | |
| C2_start | 30.0 | 120.0 | 120.0 | 66.0 | 108.0 | 62.0 | 114.0 | 77.0 | 95.0 | 46.0 | 108.0 | |
| C3_start | 30.0 | 120.0 | 120.0 | 104.0 | 42.0 | 67.0 | 40.0 | 88.0 | 95.0 | 72.0 | 120.0 | |
| C4_start | 30.0 | 120.0 | 120.0 | 102.0 | 67.0 | 112.0 | 95.0 | 59.0 | 106.0 | 43.0 | 106.0 | |
| All ψk,od | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | 0.1111 | |
| Results | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | |
| μ1_opt | 0.48 | 0.48 | 0.48 | 0.48 | 0.48 | 0.48 | 0.48 | 0.48 | 0.48 | 0.48 | 0.48 | |
| μ2_opt | 0.41 | 0.41 | 0.41 | 0.41 | 0.41 | 0.41 | 0.41 | 0.41 | 0.41 | 0.41 | 0.41 | |
| μ3_opt | 0.54 | 0.54 | 0.54 | 0.54 | 0.54 | 0.54 | 0.54 | 0.54 | 0.54 | 0.54 | 0.54 | |
| μ4_opt | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | |
| C1_opt | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | |
| C2_opt | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | |
| C3_opt | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | |
| C4_opt | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | 120.0 | |
| ψ1_opt | 0.070 | 0.054 | 0.068 | 0.019 | 0.026 | 0.073 | 0.048 | 0.025 | 0.004 | 0.118 | 0.069 | |
| ψ2_opt | 0.063 | 0.016 | 0.069 | 0.084 | 0.097 | 0.063 | 0.035 | 0.060 | 0.165 | 0.003 | 0.063 | |
| ψ3_opt | 0.077 | 0.140 | 0.073 | 0.107 | 0.087 | 0.074 | 0.127 | 0.125 | 0.041 | 0.089 | 0.077 | |
| ψ4_opt | 0.250 | 0.249 | 0.250 | 0.250 | 0.250 | 0.250 | 0.250 | 0.250 | 0.250 | 0.250 | 0.250 | |
| ψ5_opt | 0.051 | 0.133 | 0.077 | 0.043 | 0.000 | 0.049 | 0.008 | 0.129 | 0.023 | 0.058 | 0.050 | |
| ψ6_opt | 0.030 | 0.010 | 0.000 | 0.068 | 0.092 | 0.030 | 0.124 | 0.000 | 0.023 | 0.035 | 0.032 | |
| ψ7_opt | 0.062 | 0.000 | 0.066 | 0.032 | 0.052 | 0.065 | 0.011 | 0.014 | 0.098 | 0.050 | 0.061 | |
| ψ8_opt | 0.107 | 0.041 | 0.084 | 0.166 | 0.203 | 0.107 | 0.173 | 0.074 | 0.202 | 0.052 | 0.109 | |
| ψ9_opt | 0.290 | 0.356 | 0.313 | 0.231 | 0.194 | 0.290 | 0.224 | 0.323 | 0.195 | 0.345 | 0.288 | |
| Objective function [s] | 536,318 | 536,318 | 536,318 | 536,318 | 536,318 | 536,318 | 536,318 | 536,318 | 536,318 | 536,318 | 536,318 | |
| Solution | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_1 | Sol_1 |
| Initial Solutions [#] | Objective Function [h] |
|---|---|
| 5 | 2326 |
| 10 | 2336 |
| 25 | 2312 |
| 50 | 2314 |
| 100 | 2310 |
| 250 | 2297 |
| 500 | 2295 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gallo, M. Combined Optimisation of Traffic Light Control Parameters and Autonomous Vehicle Routes. Smart Cities 2024, 7, 1060-1088. https://doi.org/10.3390/smartcities7030045
Gallo M. Combined Optimisation of Traffic Light Control Parameters and Autonomous Vehicle Routes. Smart Cities. 2024; 7(3):1060-1088. https://doi.org/10.3390/smartcities7030045
Chicago/Turabian StyleGallo, Mariano. 2024. "Combined Optimisation of Traffic Light Control Parameters and Autonomous Vehicle Routes" Smart Cities 7, no. 3: 1060-1088. https://doi.org/10.3390/smartcities7030045
APA StyleGallo, M. (2024). Combined Optimisation of Traffic Light Control Parameters and Autonomous Vehicle Routes. Smart Cities, 7(3), 1060-1088. https://doi.org/10.3390/smartcities7030045