1. Introduction
The availability of cost-effective, user-friendly, and powerful hardware in virtual reality (VR) has led to a surge in applications, such as in gaming, training, engineering, design, social activities, and education. To interact with a virtual environment (VE), it is essential to be able to manipulate virtual objects within that environment. For a long time, researchers have been exploring ways to manipulate objects in virtual settings, but this is still a challenging endeavor. Despite considerable research, there is still a need to build a natural virtual interface with the accuracy and effectiveness required for professional purposes, such as in product design. The current techniques do not provide 9DoF transformations with DoF separation in manipulations, which could potentially enhance accuracy and enable more flexible operation for complex tasks.
One way of manipulating an object in VE is to select and manipulate the object from a distance. This indirect manipulation allows the user to pick up an object outside their arm’s reach and interact with it, without having to move towards it within the VE. However, manipulating objects in this way may magnify the hand manipulation error due to human instability, because with these distant manipulation techniques, the movement of the object scales up the farther away it is, increasing the error of object placement with distance [
1]. Velocity-based scaling has been proposed to reduce this scale-up error [
1,
2,
3]. The next approach to improving accuracy is DOF separation [
4,
5]. It has been stated that complete DoF separation (1DoF translation and 1DoF rotation) through virtual widgets can prevent unwanted transformations and improve the accuracy, precision, and granularity of placement, at the cost of increasing the time needed for complex tasks [
4,
5].
A typical technique for manipulating distant objects is Scaled HOMER [
1], which leverages HOMER [
6] with PRISM [
3], with the objective of improving the accuracy of HOMER using velocity-based scaling. Although the scale-up error can be reduced using velocity scaling, Scaled HOMER still suffers from poor vision and imprecise motion control, and hence higher motion instability. Moreover, it only offers 6DoF simultaneous translation and rotation, making it more suitable for coarse transformations.
In this contribution, we propose a hybrid interaction interface that integrates the bimanual near-field metaphor with scaled replica (BMSR) technique that we presented previously in [
7] and the popular Scaled HOMER [
1] interaction technique. BMSR uses a scaled replica placed within arm’s reach to manipulate its far-field counterparts [
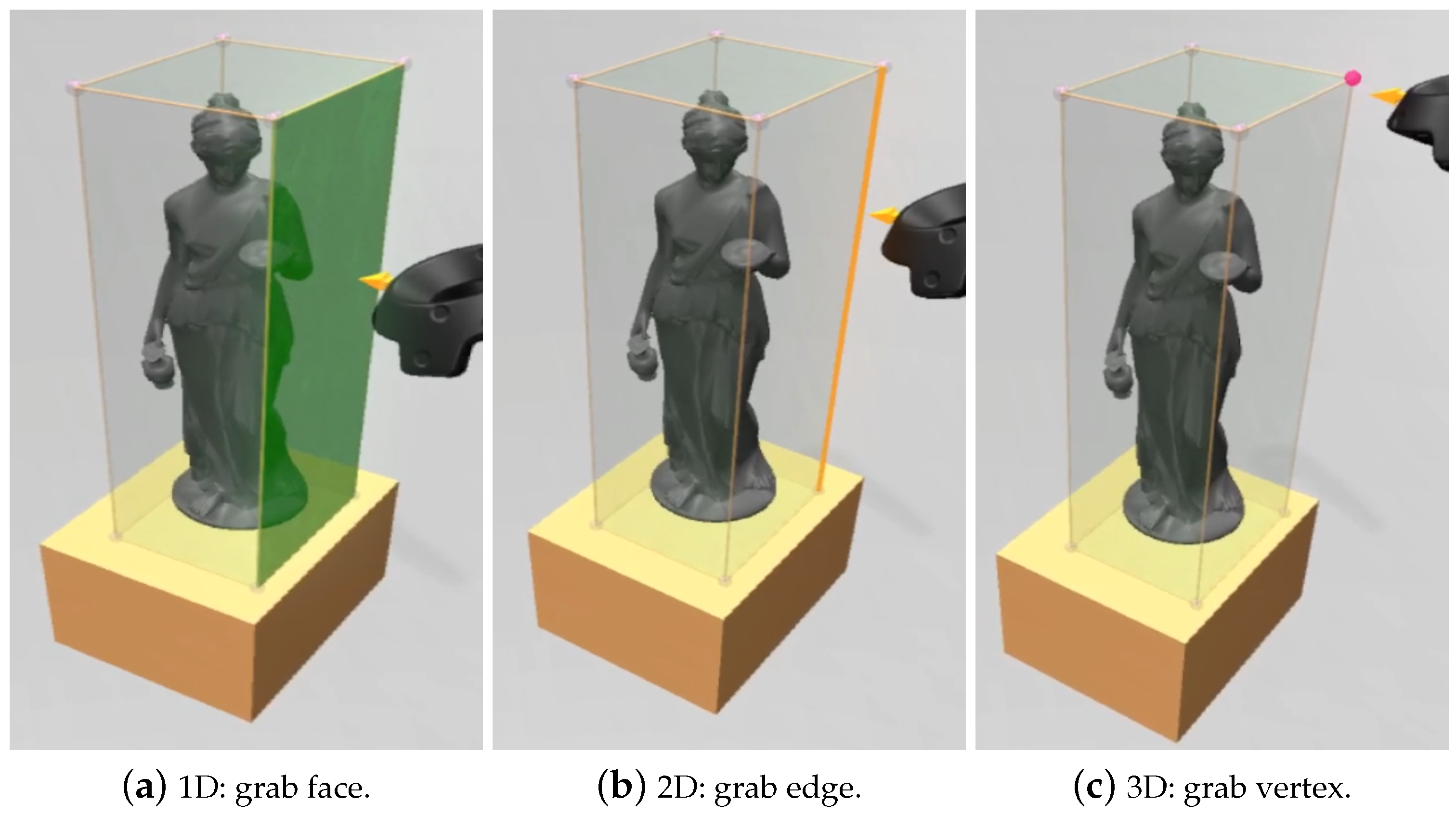
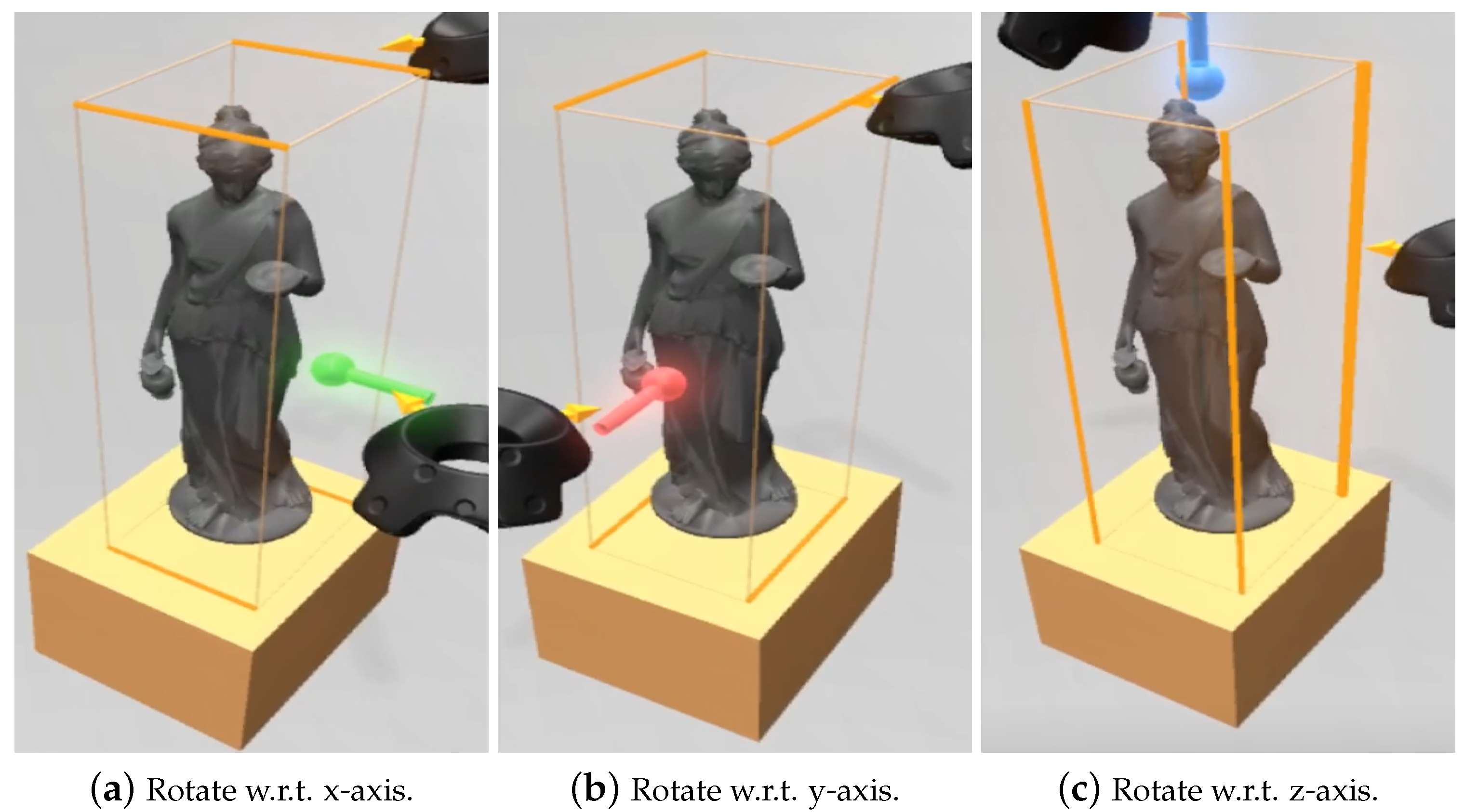
7]. Manipulation of the replica using its bounding box primitives leads to an intuitive interface and enables implementation of 1~3DoF translation, 1~3DoF uniform and anchored scaling, and 1DoF rotation. These options create an interface that supports 7 degrees of freedom, in general, for precise manipulation. Additionally, 3DoF rotation and 6DoF simultaneous translation and rotation are also supported. Supporting multilevel DoF separation can increase the precision of manipulation [
5] and also offer more flexibility for manipulation. A key factor of this bimanual near-field interaction technique is that it is an indirect method, but the scaled replica is directly manipulated at an arm’s-reach distance, taking advantage of fine motor movement control, better depth presentation and perception [
8], and enhanced vision during personal space interactions. We also conducted a comparative study to understand to what extent the objective performance and subjective impressions and perception of the participants differed between the near-field (BMSR with scaled replica), object-space (Scaled HOMER), and hybrid techniques for distant object manipulation in VR.
Our paper highlights two key contributions. First, we proposed a hybrid interface that aims to balance the accuracy and precision of the BMSR with the rapid long-range movements of the Scaled HOMER technique. Second, we conducted a novel repeated measures comparative evaluation to determine how these interaction techniques—near-field BMSR, far-field or object-space Scaled HOMER, and our hybrid technique—affected users’ objective performance variables and subjective impressions of the three interaction techniques for distant object manipulation in VR.
2. Related Work
It is possible to manipulate objects in virtual reality (VR) by directly grabbing and manipulating objects within arm’s reach. Examples of these techniques include simple virtual hand [
9], Air-TRS [
10], spindle [
11], handle bar [
12,
13], Spindle+Wheel [
14], crank handle [
13], grasping object [
13], 6DoF hand [
15], 3DoF hand [
15], widgets [
5], and PinNPivot [
16]. The user must approach objects that are beyond their reach before manipulating them. Transitioning between manipulating objects and navigating the virtual environment (VE) can be disruptive to the user’s experience, even when teleportation is employed as a common locomotion technique [
17]. A further problem is that some existing methods only provide 6DoF simultaneous translation and rotation, while others only support a restricted set of DoF separation transformations, such as 3D translation, 3D rotation, and 3D uniform scaling. Recently, PinNPivot has been proposed, offering a more extensive range of transformations, such as 3D translation, 1–3D rotation, and 6DoF simultaneous translation and rotation [
16]. None of the current techniques provide full 9DoF manipulation [
18] and 1–3D anchored scaling. However, when supported by a high DoF transformation, direct manipulation can mimic interactions in the physical realm [
19]. When an object is within arm’s reach, users have a clear view of it and a good understanding of its location due to proprioception, giving them a greater sense of control [
17]. Spatial relationships between the target object and the objects closest to it can be occluded, making accurate manipulation impossible. To provide more accurate direct manipulation, Choi et al. proposed providing the user with auxiliary views from various viewpoints [
20].
The handle box and the tBox widgets have been used to manipulate objects directly on mouse and keyboard interfaces [
21,
22]. Handle box is a bounding box that encompasses the object, with a lifting handle to move it up and down, and four rotation handles to rotate it around its central axis [
21]. The tBox widget consists of a wireframe box surrounding the target object, with which the user can drag an edge to move the object along the axis containing the edge or drag a face to rotate the object [
22]. Recently, we released BMSR [
7], which features a bounding box widget that allows users to translate or scale distant objects in 1D, 2D, and 3D, by dragging the faces, edges, and vertices of the bounding box, and to rotate in one dimension by grabbing a handlebar and dragging an edge of the box.
A second type of interface enables users to manipulate objects from a distance. This kind of manipulation allows the user to interact with objects that are beyond their arm’s reach without having to move around within the virtual environment. In the mid-1990s, two techniques were proposed for this purpose: Go-Go [
23] and ray casting [
24]. Go-Go utilizes a method that increases the user’s arm length and applies nonlinear mapping for interacting and manipulating distant objects, while ray casting involves the user selecting an object with a ray and manipulating the object that is attached to the end of the ray. As shown in [
6], Go-Go, stretch Go-Go, and ray casting had considerable drawbacks. Consequently, HOMER (hand-centered object manipulation extending ray casting) was proposed. This technique uses ray casting to select an object and then attaches a virtual hand to it, allowing the user to manipulate the object with the virtual hand. The scaling is based on the distance between the user’s body and the hand and the distance between the user’s body and the object. This scaling factor can amplify the input and magnify the error in hand manipulation [
1]. To reduce the scaled error, the PRISM techniques [
2] were designed to reduce object movement, for greater accuracy when the hand moves slowly. Wilkes et al. proposed Scaled HOMER [
1], a combination of PRISM and HOMER, to enhance performance in manipulation tasks that require a high degree of precision. This method utilizes velocity-based scaling. Scaled HOMER can increase the accuracy of manipulation by decreasing the scaled error; however, its manipulation error remains the same due to the nature of distal operations. Additionally, it can cause problems of inaccurate depth perception and blurred vision when looking at distant objects. Furthermore, it only supports 6DoF simultaneous translation and rotation, which is often suitable for large or rough transformations [
18]. In addition to velocity scaling, an adaptive gain approach was recently proposed to improve the accuracy and efficiency of distant object manipulation [
25]. Gains are calculated through fitting user data collected during object manipulation.
One way to improve the precision of manipulation is to separate the degrees of freedom (DoF separation) [
4,
5]. Mendes et al. compared simple virtual hand (which has 6DoF simultaneous translation and rotation), PRISM (which has 6DoF simultaneous translation and rotation with velocity-based scaling), and a widget for full DoF separation. The use of widgets to achieve complete DoF separation has been observed to result in higher accuracy, although it can take longer to complete complex tasks [
5]. DoF separation has been applied to direct manipulation techniques such as widget [
4,
5] and PinNPivot [
16]; however, it has not been used with distal manipulation methods.
The third way of manipulating objects from a distance in virtual reality is to manipulate them indirectly by manipulating scaled replicas in the user’s near field. World-in-Miniature (WIM) [
26] is a scaled-down representation of the entire environment, offering users a comprehensive overview of the environment, a convenient way to select and manipulate objects, and the ability to teleport. However, its primary purpose is not to provide precise manipulation. Pierce et al.’s voodoo dolls [
27] allow users to manipulate the target object’s doll with their dominant hand, while keeping the dolls for the context objects in their non-dominant hand. This takes advantage of a division of labor between the dominant and non-dominant hands [
28], in which the dominant hand of the users works within a reference frame set up by their non-dominant hand [
28]. This offers a convenient way to interact with objects; however, it may be affected by precision problems, due to the instability of controlling both hands and executing 6DOF simultaneous translation and rotation. The near-field interface with scaled replicas (BMSR) proposed by us in [
7] aims to improve the accuracy of manipulating distant objects using two mechanisms. First, it manipulates a scaled replica in the near field, instead of its counterpart in the object space, and hence is able to take advantages of finer motion control and clear vision in near-field manipulations. As a result, the manipulation error is reduced and the manipulation precision is increased. Second, its support for multilevel DoF separation may increase the manipulation precision [
5] and offers more flexibility for complex tasks. However, for long-range translation, the near-field interface may require the user to select and move the object multiple times.
The strengths and weaknesses of the current approaches are varied, and none of them are capable of dealing with manipulations that require different levels of precision. Integrating different techniques could potentially take advantage of the benefits of component techniques. However, to the best of our knowledge, only a few hybrid techniques have been proposed. HOMER could be considered a hybrid technique that integrates the ray casting technique and the virtual hand technique [
6] to manipulate distant objects. More recently, ReX Go-Go (an enhanced Go-Go) and rabbit-out-of-the-hat WIM (an enhanced WIM) were combined to facilitate precise selection of distant targets in dense and occluded virtual environments [
29]. Our research goes a step further by integrating the popular Scaled HOMER distal interface [
1] with the BMSR near-field interface [
7], with the goal of taking advantage of the benefits of both and thus satisfying different accuracy, precision, and efficiency requirements.
4. User Study
We conducted a within-subjects study to compare the BMSR, Scaled HOMER, and proposed hybrid interaction techniques. For fairness and consistency of the comparative study, in the BMSR, we ignored the functionality of uniform scaling and anchored scaling, as Scaled HOMER has no such function to compare with.
Our research question was as follows:
RQ: To what extent did participants’ objective performance, subjective impressions, and perceptions differ between the near-field (BMSR with scaled replica), object-space (Scaled HOMER) and hybrid interactions techniques for object-space or distant-object manipulation in VR?
To address this research question, we formulated the following hypotheses:
H1: We hypothesized that the BMSR would outperform Scaled HOMER in accuracy.
H2: We hypothesized that Scaled HOMER would outperform BMSR in economy of movement.
H3: We hypothesized that Scaled HOMER would result in faster movement times than BMSR.
H4: We hypothesized that the hybrid method would outperform Scaled HOMER or BMSR in speed, accuracy, and economy of movement.
The basis for H1 and H2 was the fact that BMSR allows users to view and manipulate a scaled replica of the object they are moving in their personal space, which allows enhanced depth presentation and perception and enhanced proprioception, which tends to facilitate greater precision and motor control, and potentially reduces hand instability issues [
31,
32,
33]. On the other hand, Scaled HOMER is a remote manipulation technique for distant object manipulation. Hence, the human instability for manipulation was expected to be larger than that of BMSR. Although Scaled HOMER can be prone to exaggerations in movement error for distant objects, as it utilizes velocity-based scaling, it leverages gross motor movements characterized by short and fast movements, in order to manipulate distant objects [
34]. Therefore, with regard to H3, we expected that Scaled HOMER would result in faster movements compared to BMSR. However, BMSR offers multiple levels of degrees-of-freedom (DoF) separation, being capable of leading to more precise object manipulation, while the simultaneous 6DOF translation and rotation used in Scaled HOMER was expected to have an advantage in broader gross or coarse movements in object space manipulations [
4,
5].
With the hybrid interaction technique, users can switch freely between each of the two modes, potentially leveraging the advantages of both. This method of combining the advantages of different interactions has been shown to be generally effective in improving performance, and specifically for selection and manipulation accuracy [
35,
36]. Thus, with regards to H4, we expected the hybrid interaction technique to balance between accuracy and efficiency.
4.1. Participants and Apparatus
Using G* Power, we computed an a priori power analysis to determine the number of participants in our study. Using an effect size = 0.25, = 0.05, power (1 − ) = 0.95, number of groups = 3, total number of measurements = 12, and correlation among repeated measures = 0.5, we determined a sample size of 18 participants. Thus, we conducted a user study with 18 participants recruited through a Facebook recruitment page. Using a balanced Latin square design, we assigned participants randomly to one of 3 orders of conditions. Each experimental condition appeared in each of the 3 orders in either the first, second, or third sessions. Therefore, we had a total of 6 participants randomly assigned to each of the 3 orders of the experimental sessions, as per the balanced Latin squares design. Of the participants, 10 were male, 7 female, and one did not disclose their gender. All participants were between the ages of 18 and 40 years and were avid gamers, playing on a PC or smartphone. Of the 18 participants, ten had previous experience with a VR system. The majority of them had used an HTC Vive headset, while one had used Google Cardboard.
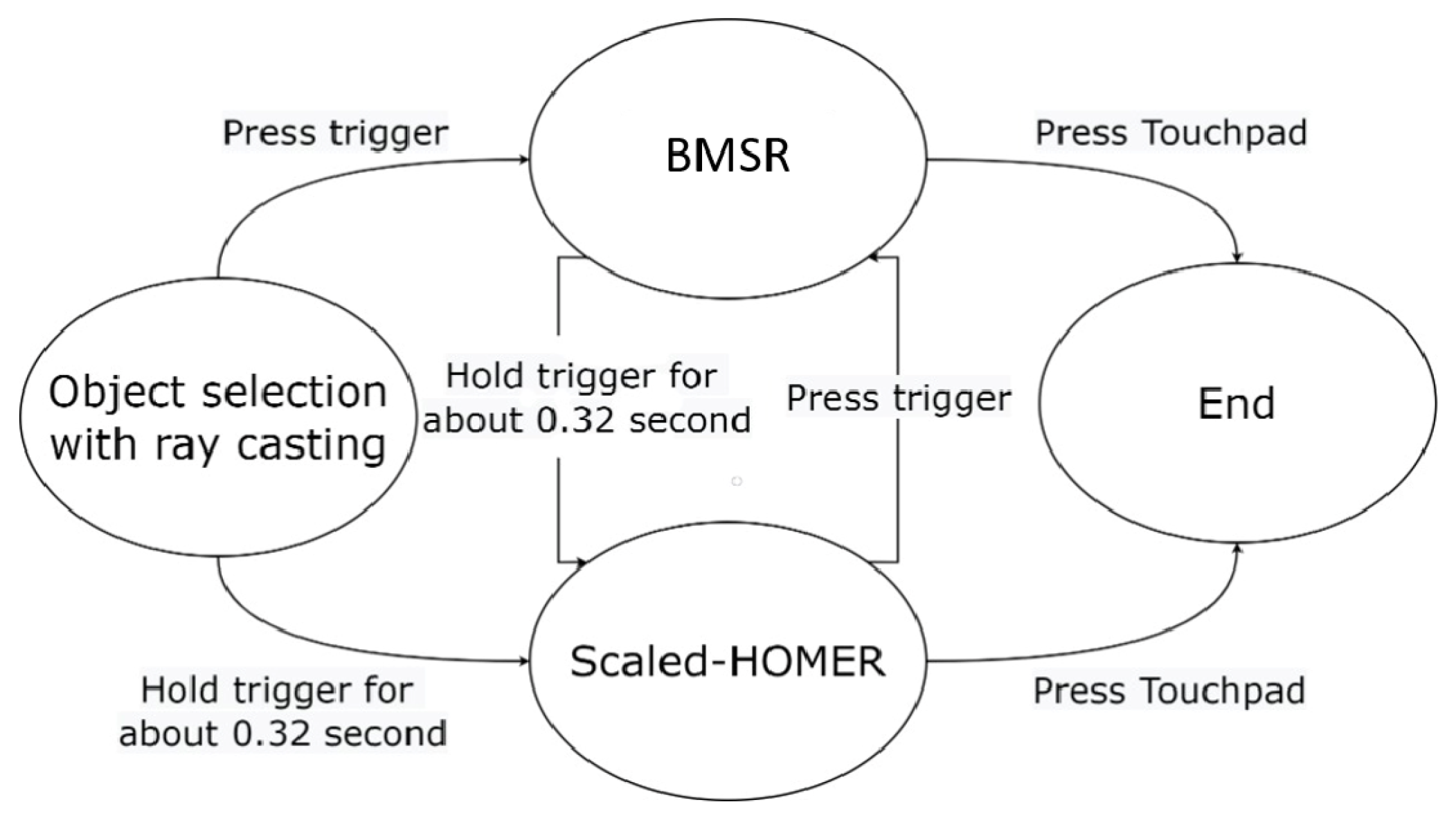
For the study, computers with an NVIDIA GeForce 1080 GPU and HTC Vive Pro headsets were used. Participants used the trigger button on the HTC Vive controller to select an object and pressed the controller’s touchpad to deselect an object. The experiment was carried out in three sessions conducted over a period of three separate days, to minimize or eliminate the effect of learning or carryover, in a manner similar to [
33,
37]. Each day, participants were randomly assigned to one of three different interaction techniques (Scaled HOMER, BMSR, and hybrid interface). A Latin square design determined the order of the conditions that the participants experienced.
4.2. Tasks
In our user study, participants were asked to complete three different types of tasks: pick-and-place [
32], docking [
38,
39,
40], and tunneling tasks [
41]. These tasks have been well established in the 3D user interface literature for comparative evaluation of interaction techniques for manipulation-type performance. Additionally, similar tasks were also used for the evaluation of near-field and object-space interaction techniques in the IEEE 3D User Interface Conference 3DUI Contest in 2016 [
42]. For each of these tasks, trials were presented as a random permutation of two variables; namely, distance from object to user (medium and far) and object size (medium and large). Therefore, each participant had to perform four tests for each type of task.
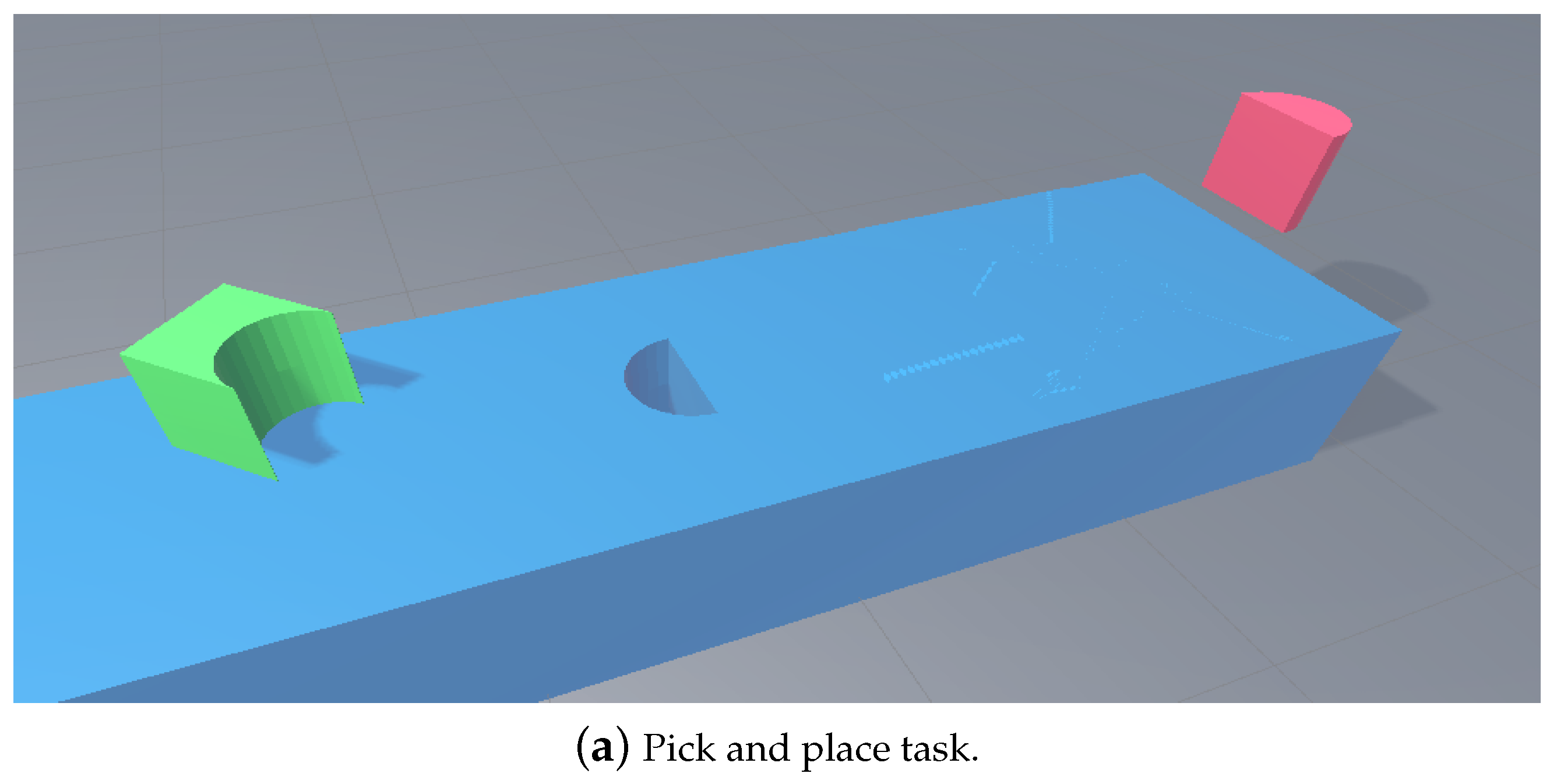
There were two steps in the pick-and-place task (as in [
32]). At the beginning, there was a semi-cylinder that appeared in the air above a plane, and participants were tasked with placing it into a hole on the plane. In Step 2, participants were tasked with placing the semi-cylinder object in a concave groove object, such that the semi-cylindrical object fit perfectly into the convex groove, which was a situation on a planar surface, as depicted in
Figure 5a.
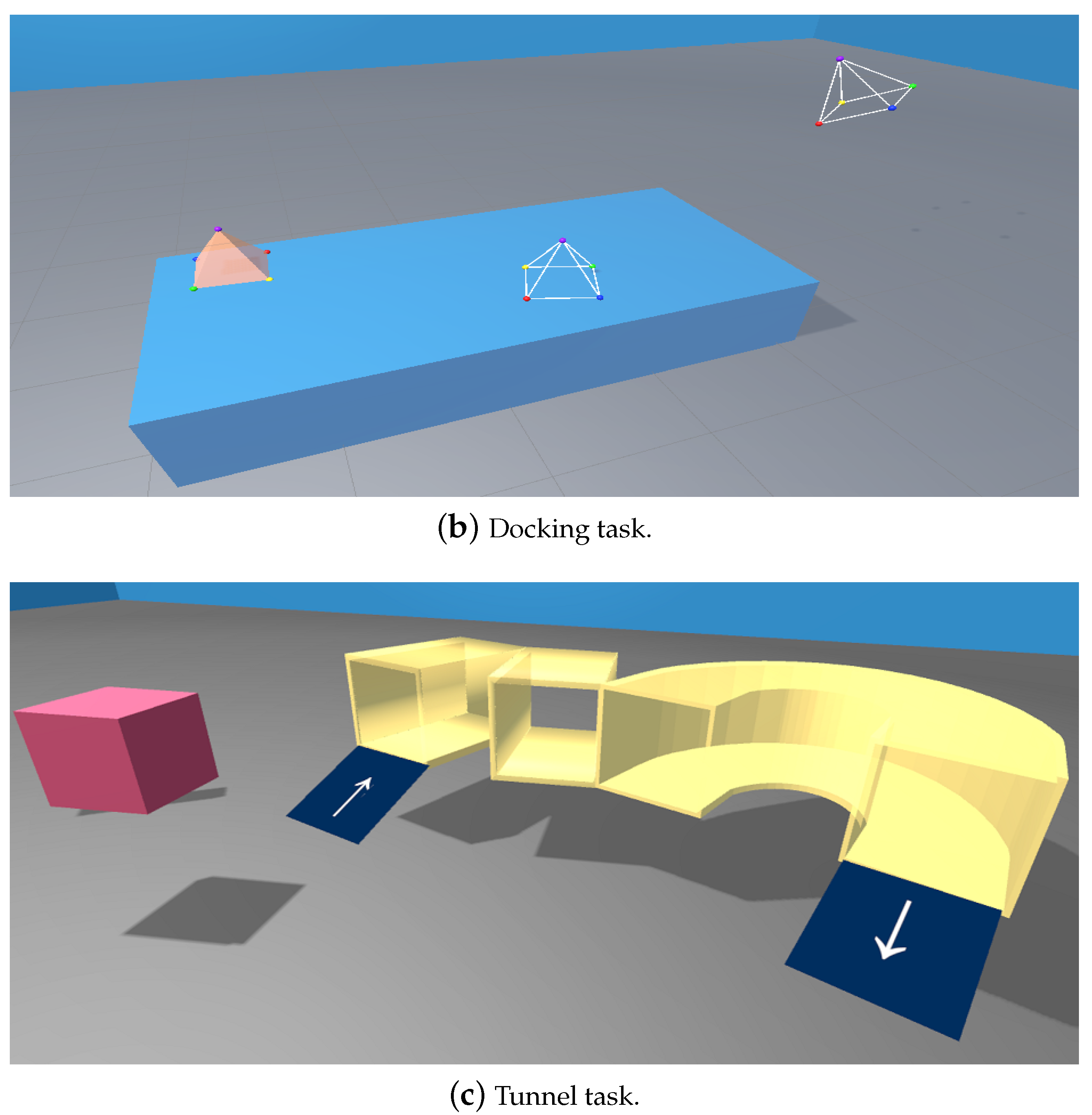
There were also two steps in the docking task (as in [
38,
39,
40]). First, a pyramid with five different colored spheres in each vertex was initialized on the plane. There was also a reference pyramid-shaped wireframe target that was presented with the same five different colored spheres in each vertex in a different pose in the scene. Participants needed to dock the wireframe target pyramid to match the color of each vertex through a combination of translation and rotation manipulations of the target, as they tried to overlay it onto the reference wireframe pyramid object perfectly. At the beginning of the task, the reference wireframe pyramid object appeared in the plane and the wireframe reference pyramid appeared in the air for Steps 1 and 2, respectively, as shown in
Figure 5b.
In the tunnel task (as in [
42]), we made three tunnels, each with a predetermined entrance and exit. The first two tunnels were straight, and the last one was C-shaped. All three tunnels were rendered with appropriate color and transparency. Participants had to insert a cube through three tunnels in sequence, as shown in
Figure 5c. The size of the tunnels was slightly larger than that of the cube, so the participants had to constantly adjust the translation and orientation of the cube and carefully maneuver it so that it passed through the tunnels, minimizing collisions with the tunnel walls, while moving the cube through the tunnels and completing the task as accurately and quickly as possible.
With these three tasks, we could gain an understanding of how the precision of the BMSR technique could help to reduce the number of collisions and how the rapid movements of the Scaled HOMER could translate the object in large scale through the pick-and-place task. Performing a docking task is highly dependent on the efficiency and accuracy of the technique. The tunnel task has a strong emphasis on guiding the object through the tunnel without colliding with the tunnel walls, which would naturally require a high degree of motor control and precise movements to perform successfully. As such, we hypothesized that the BMSR and hybrid interfaces would yield fewer collisions than Scaled HOMER. There was multi-modal audio and visual feedback when manipulated objects collided with either the plane, target, or tunnel in each task.
4.3. Procedure
The experiment began with the pre-experiment stage, where the participants filled out a demographic and Guilford–Zimmerman spatial ability questionnaire [
43]. The pre-experiment stage was only conducted on the first day of the study when the participant arrived for the first time. After these questionnaires had been completed, the experiment entered the
training phase, where we first introduced the technique through a demo video (see the
Supplementary Materials). After an explanation of the technique, we provided some simple tasks that participants needed to complete to acclimate to that condition. We provide instructions on how to accomplish the task using the interaction technique assigned under that condition. Then, they were allowed to practice repeatedly prior to the
testing phase.
In the
testing phase, participants began with a random task, as mentioned in
Section 4.2. There was also a description of the task that was provided to the participants in the experiment environment. Once they understood the task, the participant clicked on a confirmation button. After the participants completed each trial, they had to deselect the object and use a ray cursor to press the virtual 3D button to confirm that they were ready for the next trial. After clicking the confirmation button, the object for the next trial would appear immediately. The simulation gave audiovisual feedback to the confirmation button when clicking. The participants completed a total of 12 trials for all three tasks. Then, they completed a series of questionnaires in the
post-experiment phase, including our self-created system performance questionnaire, the NASA-TLX Workload questionnaire [
44], and the IPQ presence questionnaire [
45].
In order to minimize or eliminate the effects of any carryover or learning between the three conditions, the participants returned approximately two days after each session to complete the other condition, in a manner similar to [
33,
37,
46,
47].
4.4. Measures
A number of measurements were collected in each trial in the study. The objective quantitative metrics consisted of movement time, number of attempts, number of collisions, position error, angular error, path length, and total rotation. A description of only the quantitative objective dependent variables that were statistically significant in our study is given below: Manipulation time: This is the time taken by the user to manipulate the object. The manipulation time starts when the user presses the trigger button to select, and ends when the user releases the trigger button. The mean manipulation time was used to measure how much time the user needed on average to translate or rotate the object of interest. The Number of Attempts: This is a measure that represents the number of times a user grabs and releases an object during each trial. The number of attempts is measured as the count of the number of times the user presses the trigger button to select and manipulate the object and then subsequently release it. Each time an object is selected to be manipulated and then subsequently released, the number of attempts per trail is incremented by one. The mean number of attempts is the average number of times users’ select an object for manipulation and releases it across trials. The Number of Collisions: This is the number of times the manipulated object collided with other objects in the VR scene. The mean number of collisions shows on average how precisely and carefully users selected and manipulated the target object in the fine motor tasks across trials. The Angular Error: This is the sum of the absolute angular difference between the orientation of the target object and that of the reference object. Let
be the orientation of the reference object, and
be the orientation of the manipulated target object, with the orientation represented in Euler angles. The mean angular error is the average angular error of performance across trials in a task. The angular error
is computed as
The objectives of this study were to compare these three interaction techniques using performance metrics of efficiency, the ability to quickly place the object in the destination; accuracy, the difference between the reference or ideal pose and the actual pose of the target, and the ability to place the object at the target without colliding with elements in the environment; and economy of movement, the ability of the user to manipulate the object directly to the target location without wasted or unnecessary movements. We quantified these three metrics using more specific variables that are listed above, where there is a many-to-one mapping between the objective quantitative variables and the performance metrics. Efficiency was quantified using the movement time and the number of attempts in each trial. Accuracy was quantified using the number of collisions, the distance error, and the angular error for each axis. Finally, economy of movement was quantified using the measures of path length and total angular rotation on each axis.
5. Results
5.1. Quantitative Objective Results
The objective variables were subjected to a one-way repeated measures ANOVA analysis, after verifying that all the assumptions of the parametric ANOVA analysis had been met (i.e., equality of variance, normality, and sphericity). The three within-subject conditions were Scaled HOMER, BMSR, and hybrid interaction techniques. The main goal of this was to determine how the user performance differed between each interaction technique. Pairwise post hoc tests between the levels of conditions were conducted using the Bonferroni method.
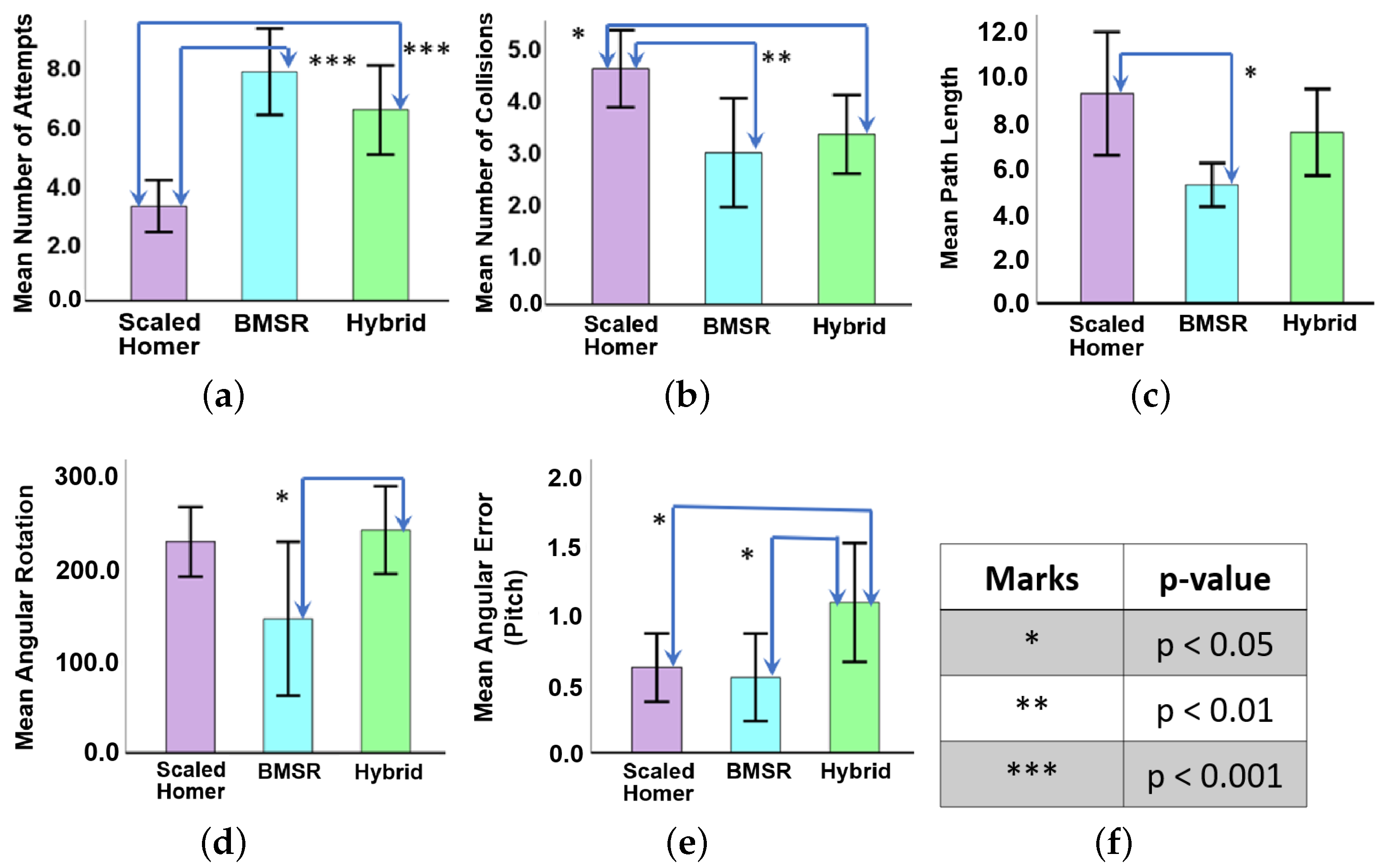
5.1.1. Pick-and-Place Task Performance
The ANOVA analysis found significant effects of the condition on the number of attempts (F(2,54) = 15.48,
p < 0.001, part.
= 0.41), number of collisions (F(2,54) = 4.29,
p = 0.02, part.
= 0.16), path length (F(2,54) = 5.33,
p = 0.008, part.
= 0.19), total rotation on the roll axis (F(2,54) = 3.26,
p = 0.048, part.
= 0.13), and angular error on the pitch axis (F(2,54) = 3.55,
p = 0.024, part.
= 0.15). Post hoc pairwise comparisons and illustrations of the magnitude of the significant differences using the Bonferroni method are shown in the graphs in
Figure 6.
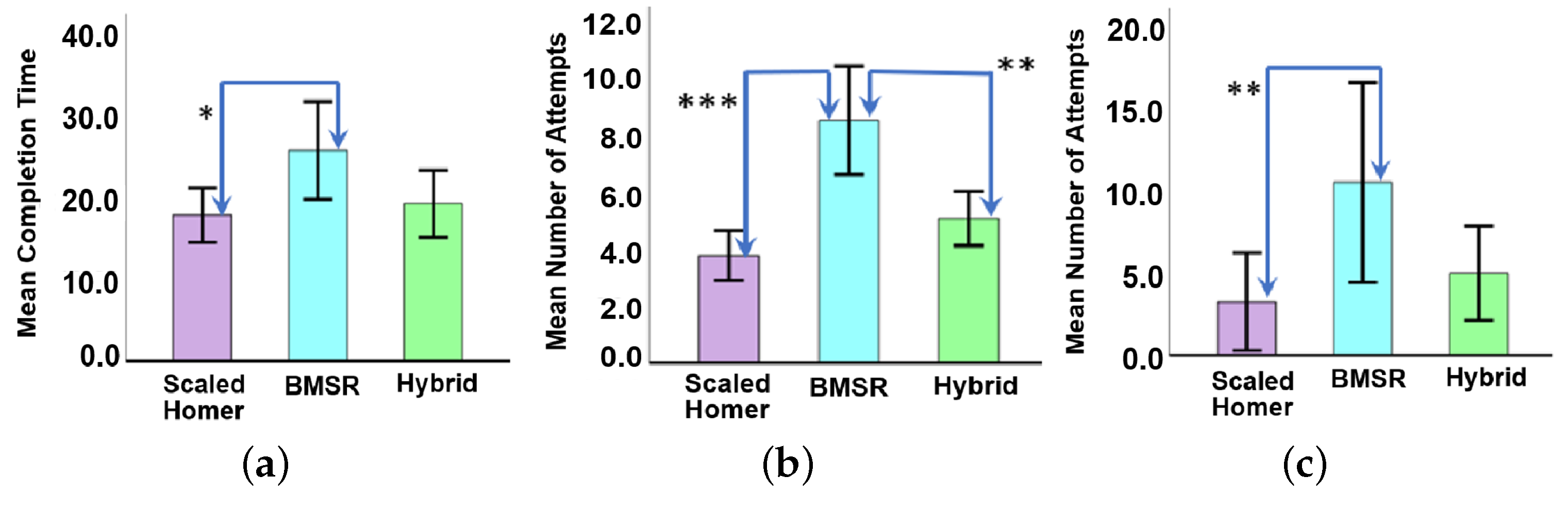
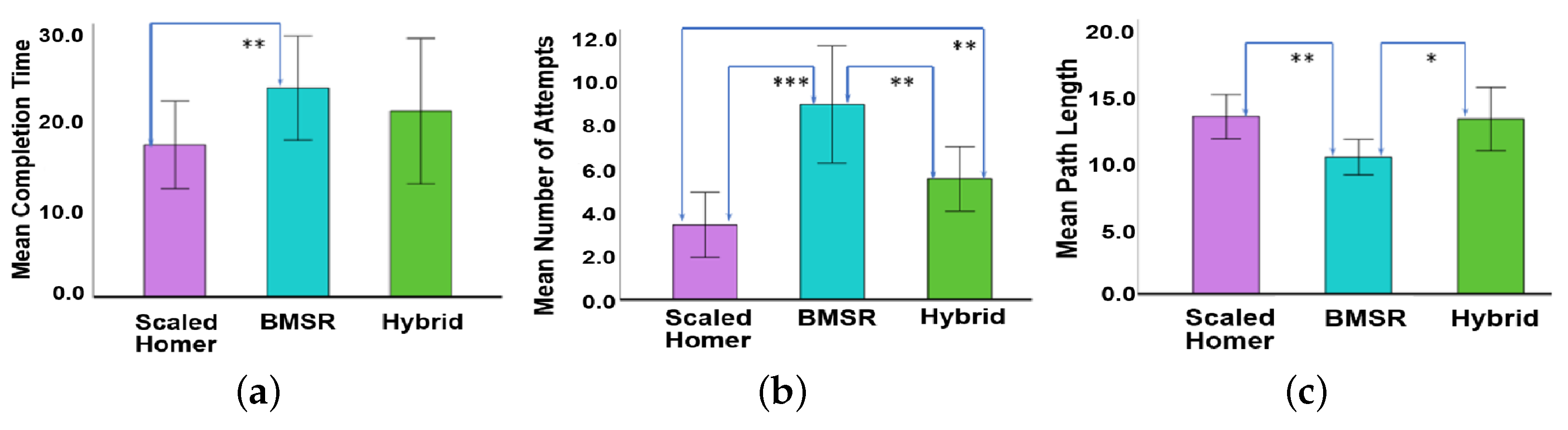
5.1.2. Docking Task Performance
The ANOVA analyses of the docking task showed significant effects of the condition on movement time (F(2,34) = 3.67,
p = 0.033, part.
= 0.14) and number of attempts (F(2,34) = 14.24,
p < 0.001, part.
= 0.39). Post hoc pairwise comparisons using the Bonferroni method are shown in the graphs in
Figure 7a,b.
5.1.3. Tunneling Task Performance
The ANOVA analyses of the data for the tunneling task showed a significant effect of the condition on the number of attempts (F(2,34) = 3.32,
p = 0.045, part.
= 0.13). Post hoc pairwise comparisons using the Bonferrroni method are shown in the graphs in
Figure 7c.
5.1.4. Overall Performance Analysis
In order to examine the overall performance in all tasks, we pooled the data in all tasks and performed a repeated measures ANOVA analysis on the overall data (in a manner similar to previous analyzes), after verifying that all assumptions were met. ANOVA analysis revealed a significant main effect of condition on movement time (F(2,34) = 4.300,
p = 0.022, part.
= 0.202), on the number of attempts (F(1.380,23.456) = 23.897,
p < 0.001, part.
= 0.584), on the path length (F(2,34) = 7.774,
p = 0.002, part.
= 0.314), and in placement accuracy (F(1.287,21.885) = 4.456,
p = 0.038, part.
= 0.208). The graphs in
Figure 8 show the results of post hoc pairwise comparisons using the Bonferroni method.
5.2. Quantitative Subjective Results
The subjective metrics were administered a non-parametric related-samples Friedman test, and we evaluated any significant effects via post hoc pairwise comparisons using Wilcoxon’s signed ranks test.
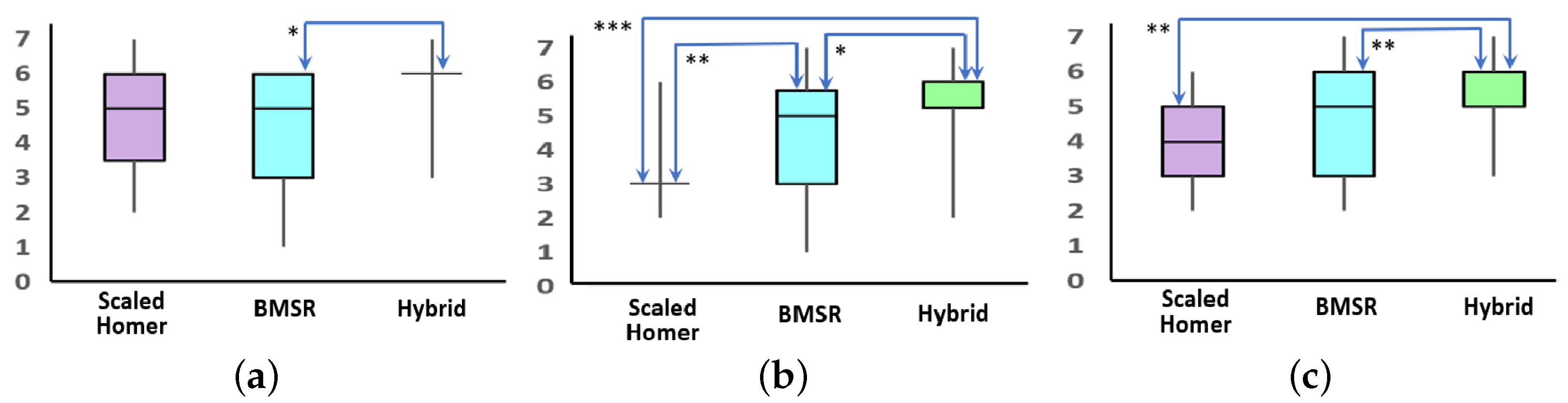
5.2.1. System Performance Questionnaire
In evaluating the scores from our system performance questionnaire, we found the following results from the non-parametric analysis of the system performance questionnaire results.
In response to the question, “to what extent did you perceive you had sufficient motion control when moving an object from one location to another”, we found that the condition significantly affected the perceived level of object motion control in moving the object via translation
= 7.107,
p = 0.029. In the post hoc pairwise comparisons, Wilcoxon’s signed ranks test revealed that the BMSR technique had a lower perceived translation control score than the hybrid technique (Z = −2.436,
p = 0.015). See
Figure 9a.
In response to the question, “to what extent did you perceive you had sufficient motion control in rotating an object”, we found that condition also significantly affected the perceived level of object motion control in moving the object through rotation
= 19.433,
p < 0.001. Post hoc pairwise comparisons using Wilcoxon’s signed ranks test revealed that the BMSR technique had a significantly lower perceived rotation control score than the hybrid technique (Z = −2.269,
p = 0.023). Post hoc pairwise comparisons also revealed that Scaled HOMER had a lower perceived rotation control score than the BMSR technique (Z = −2.620,
p = 0.009) and the hybrid technique (Z = −3.695,
p < 0.001). See
Figure 9b.
Finally, in response to the question, “to what extent did you perceive that you had sufficient motion control in moving an object from one location to another and rotating the object simultaneously”, we found that condition also significantly affected the perceived level of object motion control in simultaneous translation and rotation
= 12.933,
p = 0.002. Post hoc pairwise comparisons using Wilcoxon’s signed ranks test also revealed that the hybrid technique had a higher perceived simultaneous translation and rotation control score than Scaled HOMER (Z = −2.806,
p = 0.006) and the BMSR technique (Z = −2.729,
p = 0.006). See
Figure 9c.
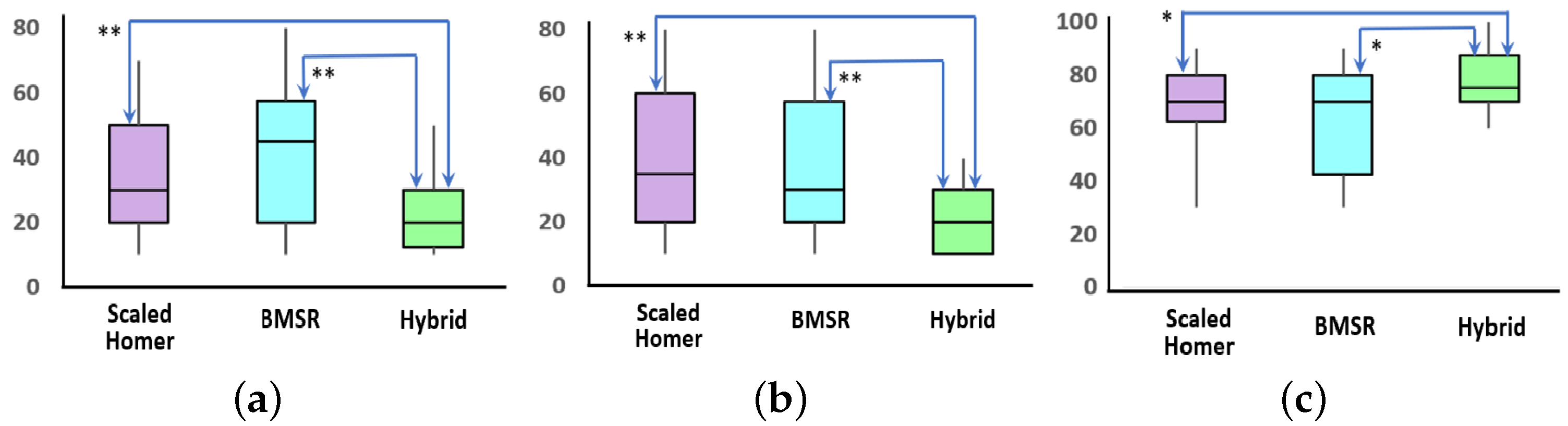
5.2.2. NASA-TLX Workload Assessment
A non-parametric analysis revealed that the condition significantly affected the perceived mental demand
= 11.925,
p = 0.003, perceived physical demand
= 12.737,
p = 0.002, and perceived performance demand
= 8.291,
p = 0.016. Wilcoxon’s signed ranks test revealed that the hybrid technique had a lower perceived mental demand than the Scaled HOMER (Z = −2.738,
p = 0.006) and the BMSR techniques (Z = −2.949,
p = 0.003). The signed ranks test revealed that the hybrid technique had a lower perceived physical demand than the Scaled HOMER (Z = −3.033,
p = 0.002) and the BMSR techniques (Z = −2.992,
p = 0.003). The signed ranks test revealed that the hybrid technique had a higher perceived performance demand than the Scaled HOMER (Z = −2.106,
p = 0.035) and the BMSR technique (Z = −2.550,
p = 0.011). These results are depicted in
Figure 10.
There was no significant difference in the affect of the condition on the presence scores.
5.3. Qualitative Results
As part of our system performance questionnaire, we asked each participant what they liked or disliked about each aspect of the simulation and which interaction metaphor they preferred of the ones that were available. When asked which metaphor they preferred between the Scaled HOMER and the near-field metaphor, the spread was relatively even. Out of 18 participants asked about this, 10 participants preferred the near-field metaphor and 8 participants preferred the Scaled HOMER metaphor. The responses to this question can be summarized by a participant who said “It depends. If you need to make long-range, fast movements, I prefer the Scaled HOMER; If you need to make large rotations or precise translations, I prefer the near-field metaphor”. Two participants said that the “near-field replica blocked their view”, and those who preferred the near-field metaphor said that it was easier to control, especially for more precise object placement.
When asked about what they liked or disliked about translational movements in the hybrid metaphor, seven participants stated that they liked that they could use Scaled HOMER for larger movements and the near-field metaphor to perform the fine-tuning. Similarly, when asked what they liked about rotations, six participants said that they could switch between scaled HOMER and near-field to harness the advantages of each. When asked specifically about their opinions about translation using Scaled HOMER, some of the participants stated that they liked the “intuitive control” and “extreme convenience for simple translations”, and some stated that they did not like that it “required a lot of trial and error to get used to the relationship between the hand’s velocity and the object’s movement distance”. When asked about their opinions about rotations, four participants said that they liked that they could rotate the object simply by rotating their wrists, but, similarly to translation, several participants said that they had a small range of angles to rotate and that it required a lot of trial and error to gain familiarity with the metaphor. When asked specifically about their opinions about translation in the near-field metaphor, some of the participants stated that they liked the fact that they could directly grab a replica of the object and interact with it, saying it “provided easier control” and “was realistic”. However, six participants stated that they disliked the fact that they sometimes needed to select the same object multiple times. When asked about their opinions about rotations, five participants liked that they could perform precise rotations “due to the constrained transformation”, and seven participants stated that they disliked that it was hard to decide which axis to select.
Finally, when asked which method they preferred between all three interaction metaphors, all but two of them preferred the hybrid metaphor, with most of them saying that it had the advantages of both the Scaled HOMER and the near-field metaphor techniques. One user preferred the near-field metaphor, and one preferred Scaled HOMER. The participant who preferred Scaled HOMER stated that it was “…more intuitive and faster”. The participant who preferred the near-field metaphor responded that “…the replica appears in front of the user eliciting more presence, can do direct manipulation using it. Also can not only do precise translation and rotation but also do intuitive manipulation, operation is more diverse”. The questionnaire also asked about when they preferred to use each metaphor and why. When answering about Scaled HOMER, 10 participants stated that they preferred it when performing translational movements, specifically faster translations. Of those participants, six cited they liked the ability to perform “large-range translation”. When participants were answering about when they preferred the near-field metaphor, 10 stated that they preferred it when performing rotational movements. In addition, six of these participants stated that they preferred it when performing precise movements.
6. Discussion
In order to answer our research question, “To what extent did participants’ objective performance, subjective impressions and perceptions differ between the interaction techniques in the near field (BMSR with scaled replica), object space (Scaled HOMER) and a hybrid technique for object space or distant object manipulation in VR?”, we first operationalized these research questions by formulating hypotheses to answer the underlying research question from an objective perspective. From
Section 4, our first hypothesis (H1) was that the
BMSR technique would outperform Scaled HOMER in accuracy and our second hypothesis (H2) was that the
BMSR technique would outperform Scaled HOMER in movement economy. The first hypothesis was
supported by our objective data, as the BMSR technique was shown to be superior in accuracy, based on mean angular error, mean angular rotation, and mean number of collisions, especially in the pick-and-place task. The examination of effect sizes also suggested that the effect of BMSR on accuracy over the other conditions was important and significant, as evidenced by the observed partial
square range of 0.14 to 0.21.
The second hypothesis was partially supported by our objective data. On the one hand, the economy of movement, based on mean path length, was superior for BMSR compared to Scaled HOMER in multiple tasks, such as pick-and-place and tunneling. On the other hand, the number of attempts for the stop and start of the hand movements in the manipulation process was less with Scaled HOMER compared to BMSR across all three tasks of pick-and-place, docking, and tunneling. Therefore, we found that H2 was partially supported overall. An examination of the effect sizes associated with economy of movement variables suggested that our results were also important and significant, as evidenced by the observed partial square value range of 0.13 to 0.58.
We also hypothesized (H3) that Scaled HOMER would result in quicker movement times than BMSR. We found support for this hypothesis in our objective data in terms of mean number of attempts and speed, which were superior (i.e., lower) for Scaled HOMER compared to BMSR. An examination of the effect sizes associated with the efficiency variables suggested that our results were also important and significant, as evidenced by the observed partial square value range of 0.14 to 0.20.
Our results suggest that the BMSR interaction technique offered better motion control than the Scaled HOMER or hybrid conditions, using the metric of fewer collisions, and greater movement economy, using the metric of lower path length, consistently across tasks. One possible reason for this finding could be the large distance over which users manipulated objects using Scaled HOMER and the instability of small hand motion that caused larger errors in placement, even with velocity-based scaling [
1].
The BMSR interaction technique allows users to leverage near-field viewing, depth presentation, and perception, as well as visuo-proprioceptive information from hand/controller motion, which potentially enables precise control of objects, as supported by [
17,
31,
32]. These cues provide maximum benefit when working with objects in a near-field space, which could provide an important advantage for near-field over object-space interaction techniques [
48]. Additionally, the BMSR technique provides a scaled replica of the manipulated object, which potentially improves manipulation performance, as users can act on visuomotor information during fine motor actions on near-field replicas, as also shown by research on the voodoo dolls interaction technique [
27,
49]. However, this may come at the cost of visibility of far-field objects, as the replica may partially occlude the participants’ view.
Overall, we observed that the BMSR interaction technique had a lower motion instability than Scaled HOMER when manipulating distant objects. The BMSR technique allowed users to manipulate objects with degree-of-freedom (DoF) separation. This DoF separation can be beneficial for precise movements, as evidenced by the findings of studies by [
4,
5]. These studies showed that simultaneous movements of translation and rotation were desirable for long-range and faster movements, but separating the DoF was better for smaller and more precise movements. Participants made fewer attempts with the Scaled HOMER technique than in the BMSR technique. Specifically, in the docking task, the Scaled HOMER technique yielded lower task completion times than the BMSR technique, presumably reducing the time that was taken between each attempt.
Our findings are consistent with the results of the study by Katzakis et al., who found similar drawbacks for Scaled HOMER as in our findings [
38]. These findings suggest that in terms of the speed–accuracy trade-off, participants tended to favor speed over accuracy with Scaled HOMER relative to the BMSR interaction technique. However, when using the BMSR technique, they tended more toward accuracy over speed [
30]. This is a trade-off worth considering, especially since Scaled HOMER showed the same level of movement speed as other object-space manipulation techniques [
1].
The fourth hypothesis (H4), which was that
the hybrid method would outperform Scaled HOMER and BMSR in accuracy and economy of movement, was
not supported by our objective data, as there were no significant performance differences in efficiency, accuracy, and economy of movement with the BMSR and Scaled HOMER techniques. Our hybrid technique allows the user to transition freely between Scaled HOMER and BMSR techniques. Although this transition was seamless, it still involves transitioning between methods, which could introduce additional dimensions of control and complexity for user interactions with this technique. However, interestingly, our hybrid technique had a lower perceived mental burden than the BMSR technique, as indicated by the NASA TLX workload results. Our participants even suggested that the hybrid interaction technique merged the best of both the constituent interaction techniques. All of these data could possibly imply a discrepancy between user impressions and objective performance, and this could suggest that interfaces that are perceived to be favorable may not always produce the best objective results [
50]—what is favorable may not always be optimal.
The qualitative results provided additional support and clarified some of the objective quantitative findings. Participants’ responses suggested that if they needed to make long-range (gross) motions, then they preferred Scaled HOMER for manipulation interactions. However, if they needed to make very precise translation or rotation manipulations, then they preferred the near-field interaction technique. The most interesting result was that, when asked which method they preferred between all three interaction techniques, the vast majority of participants preferred the hybrid interaction technique, as it took advantage of the best of both words approach, in that it integrated the advantages of Scaled HOMER for far field gross manipulation, and the near-field technique for personal space fine motor manipulations.
Limitations
Although there were not many objective differences between the hybrid technique and the other conditions, interestingly, our data revealed that the hybrid technique could yield similar objective results, while minimizing mental and physical demands compared to the Scaled HOMER or BMSR techniques individually. The hybrid technique aims to leverage BMSR and Scaled HOMER, thus we can expect that the user may use Scaled HOMER to rapidly and coarsely move the target object to a place near the destination and then use BMSR to manipulate the object into the final destination. If the tasks involve long-range translations, BMSR alone may require several rounds of object selection and manipulation, and hence require more time than Scaled HOMER or the hybrid technique. In addition, although we found that the BMSR technique showed greater accuracy with regard to angular error compared to the other techniques, we expected to find more evidence of lower positional and orientation errors with the BMSR technique as compared to Scaled HOMER. We believe this remains to be explored further in future studies, where we can examine more specifically the fine motor actions of the two interaction techniques with manipulation tasks that require greater positional and orientation control, such as mechanical assembly or fine motor object extraction tasks. These tasks may also resemble concrete tasks in real applications of VR, compared to the abstract tasks typically used in basic interaction technique research. One finding that we noticed was that the analyses of the objective data yielded significant effects between conditions in the pick-and-place and docking tasks, but the tunneling task showed fewer significant differences between the conditions. This could be due to the added complexity of the tunneling task, as that task required a longer series of translating and rotating the object, and this could have caused a ceiling effect in performance between the three conditions, in that participants in all three conditions performed equally poorly in this task. Regarding the qualitative results, although we defined the preferences and user impressions questionnaire as neutral in language and tone, so as not to induce any bias in the manner in which the questions were asked, there could still have been some bias in the manner in which users responded to the questionnaire. However, we believe any such bias to be very small to non-existent, as the participants were not told what we expected in terms of the strengths and weaknesses of each condition, and our qualitative results also confirmed and validated the objective quantitative findings derived from the study.
7. Conclusions and Future Work
An advantage of virtual reality is that users do not need to be in direct proximity to the objects they are manipulating. This is helpful, as the user can take advantage of personal space depth presentation and motor control in manipulating far-field objects, without the need to approach the intended objects. In this paper, we set out to compare and contrast the effectiveness of a BMSR interaction technique with scaled replicas against Scaled HOMER, an established object-space or far-field manipulation technique, and our Hybrid interaction technique that combined both techniques via a seamless switching and transitioning method.
Our objective results suggested that Scaled HOMER yielded a faster performance than the BMSR technique, whereas the BMSR technique outperformed Scaled HOMER in the metrics of enhanced movement control (lowest collision) and economy of motion. This was reflected in the subjective information, as users preferred Scaled HOMER for fast movement but preferred the BMSR technique for fine control and adjustments. We also proposed a hybrid technique that allowed users to switch freely between the BMSR and Scaled HOMER techniques. Our data showed that, although there was no objective benefit to this hybrid technique as compared to the two constituent techniques, our subjective responses suggested that it was easier to use than the other two and reduced the overall perceived workload. The hybrid technique combined the advantages of both constituent techniques, but the added time and effort of switching between the two may counteract the benefits of its ease of use. Further research may reveal how a hybrid technique could yield objective benefits, to better reflect the users’ subjective impressions.
Recommendations derived from this contribution include using a near-field interaction technique for indirect manipulation in tasks that require precise adjustments from a distance. However, object space manipulation techniques like Scaled HOMER may be better for larger translations and rotations. Near-field manipulation can be very useful in applications such as engineering, architecture, and mechanical assembly. Interface designers should consider the task they are trying to implement and then choose whether to use a near-field technique or a far-field object space manipulation technique, depending on how much precision is required to complete that task. Our findings have also shown that users prefer a hybrid technique that can combine the precision of a near-field technique with the broad movements of a far-field manipulation technique. Our proposed hybrid technique was not shown to be objectively inferior to its component techniques.
A future direction of this research would be to explore the effects of DoF separation in near-field interaction techniques for improving precision and performance in manipulation tasks. We will also examine the effects of near-field, object-space, and hybrid interaction techniques on performance and perception in applied simulation scenarios such as mechanical assembly and fine object extraction.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










