
Dynamic Behavior of Rotation Transmission Nano-System in Helium Environment: A Molecular Dynamics Study




Abstract
:1. Introduction
2. Results and Discussion
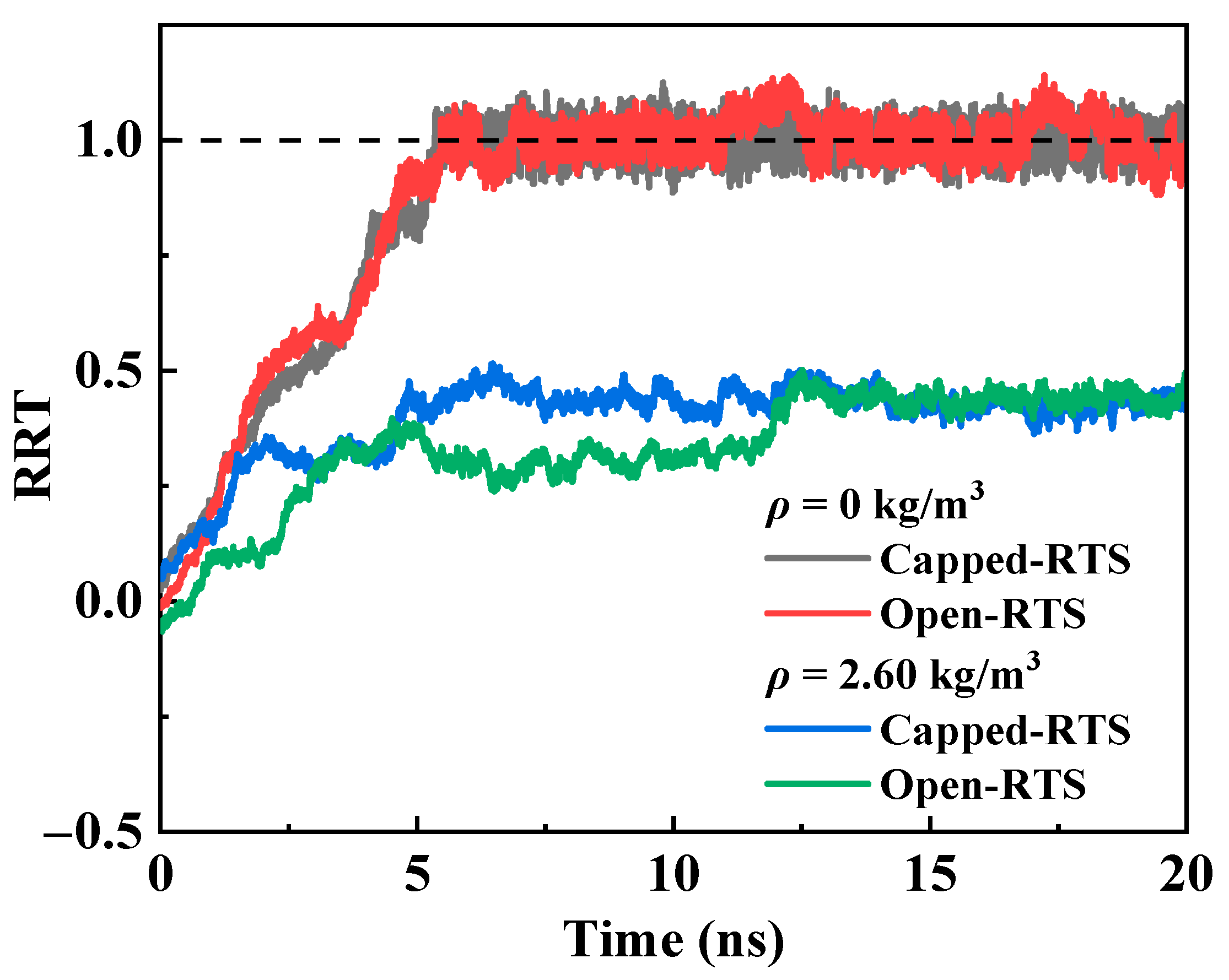
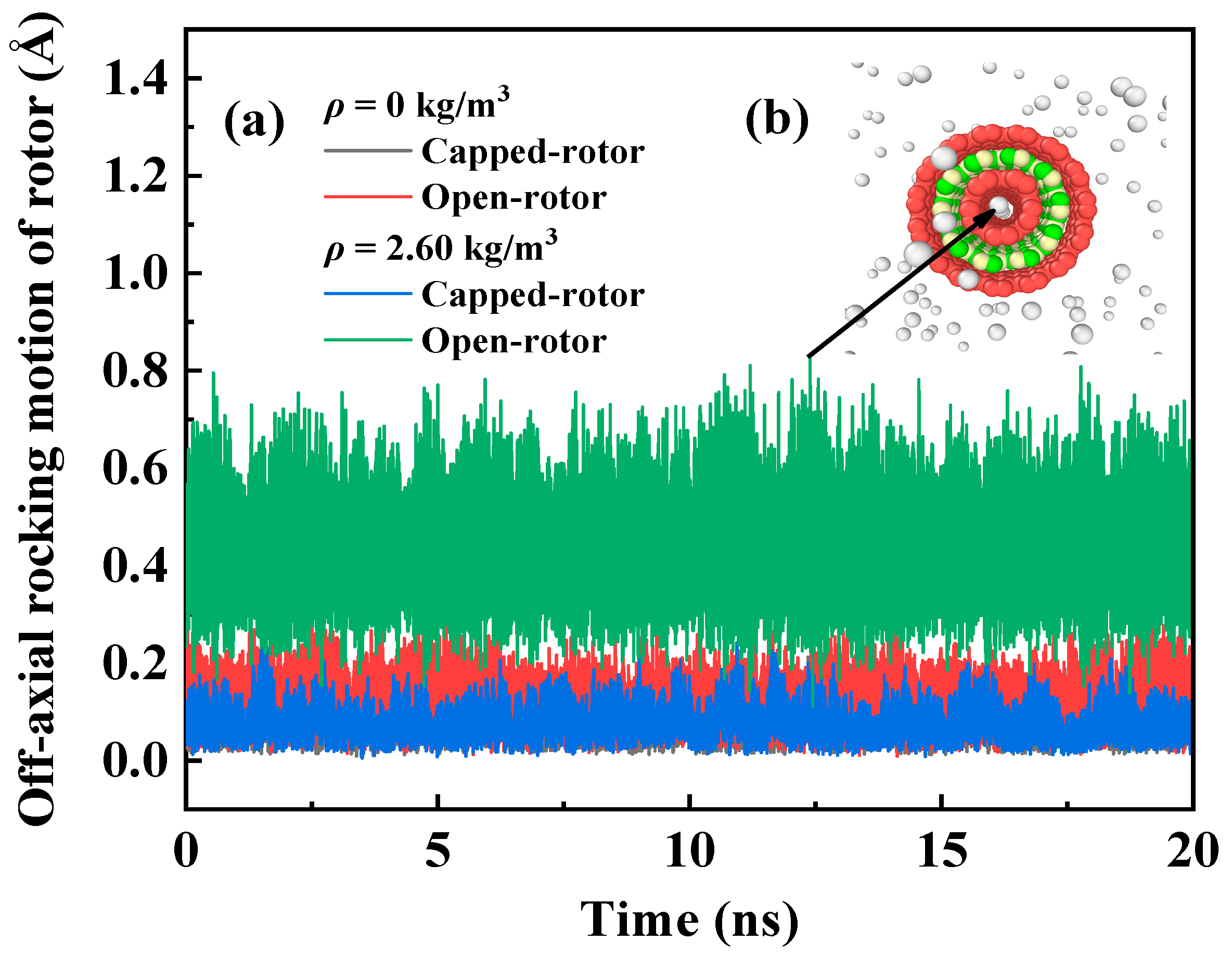
2.1. Comparison of Two Heterogeneous Rotation Transmission Nano-Systems
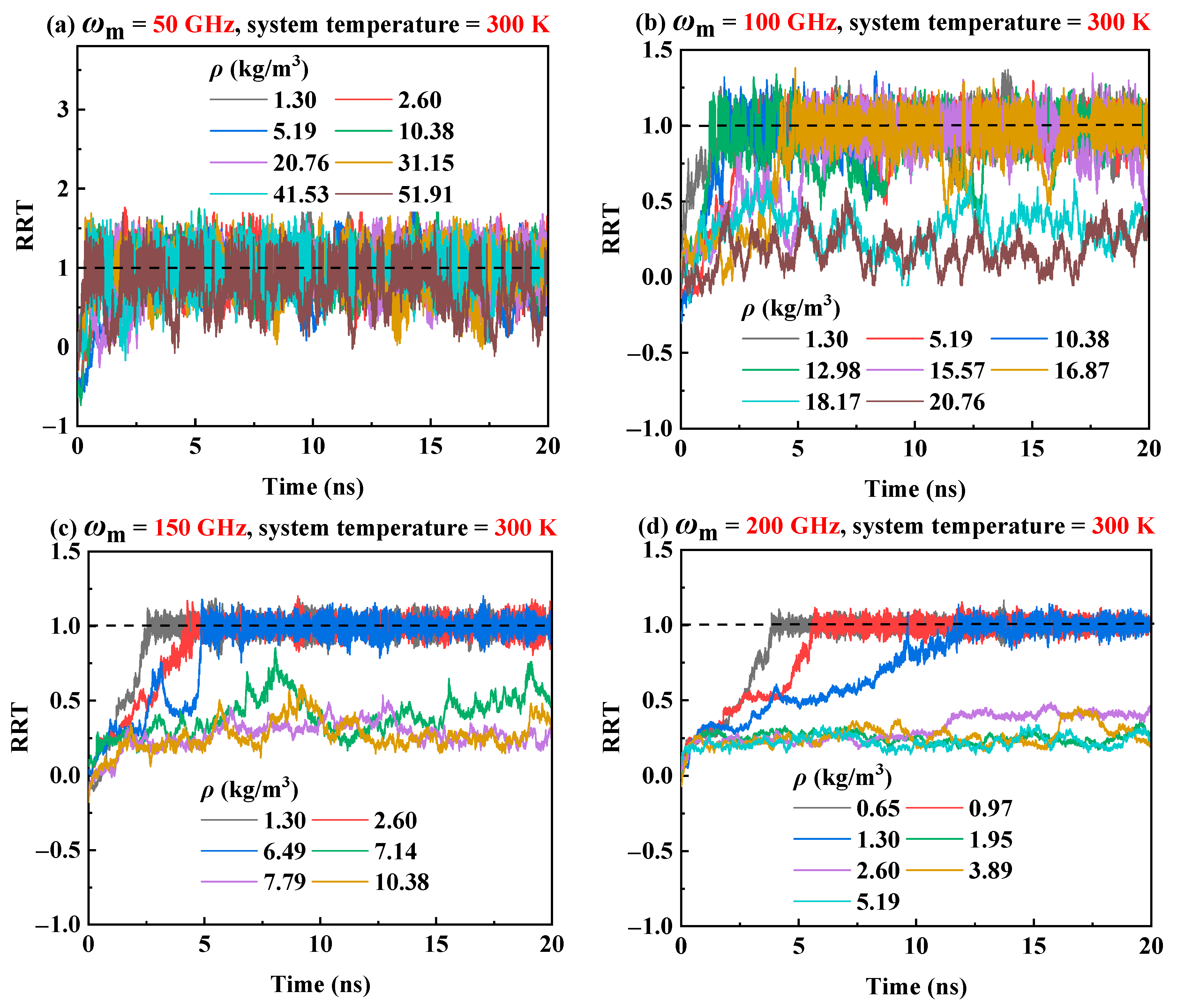
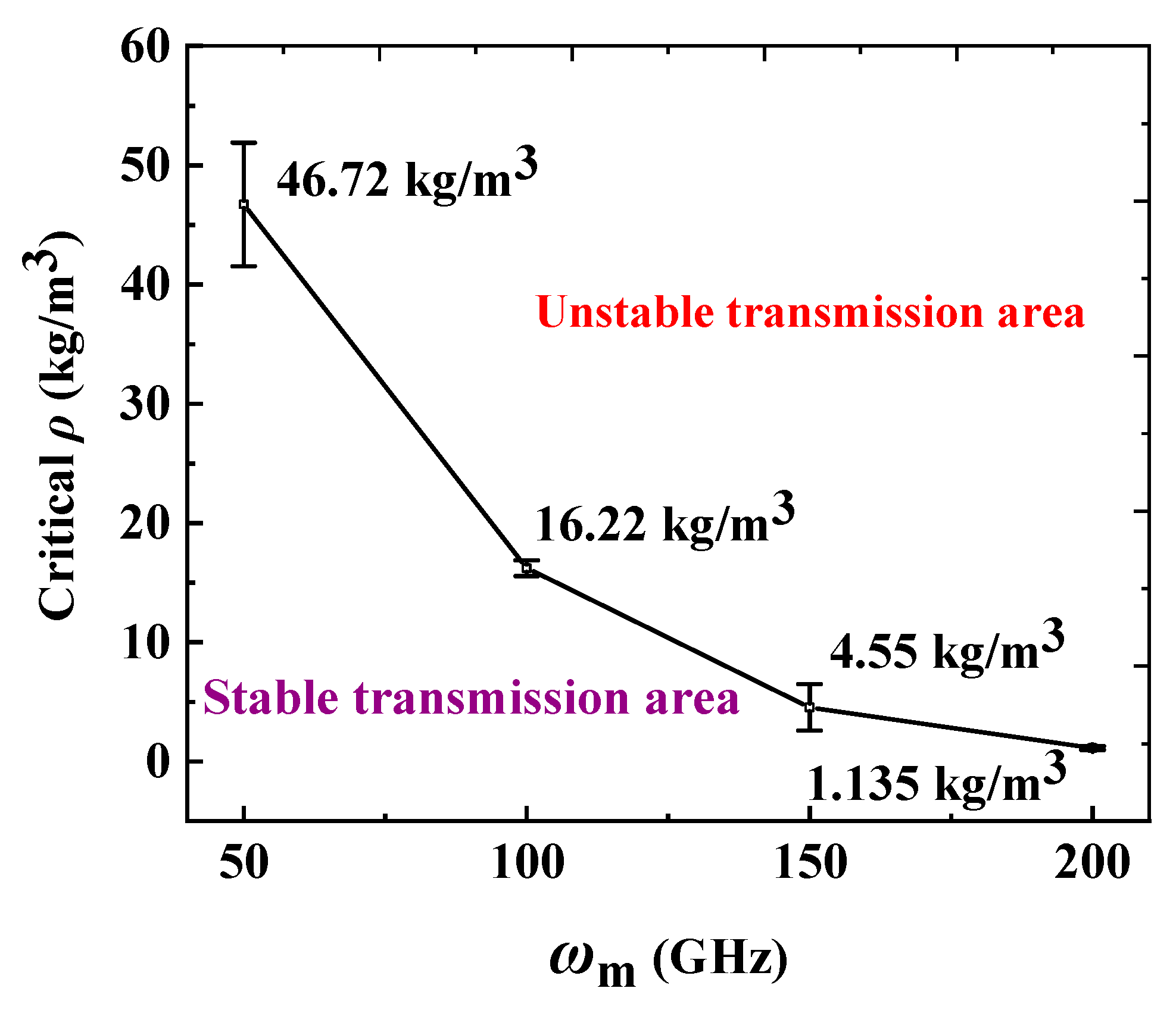
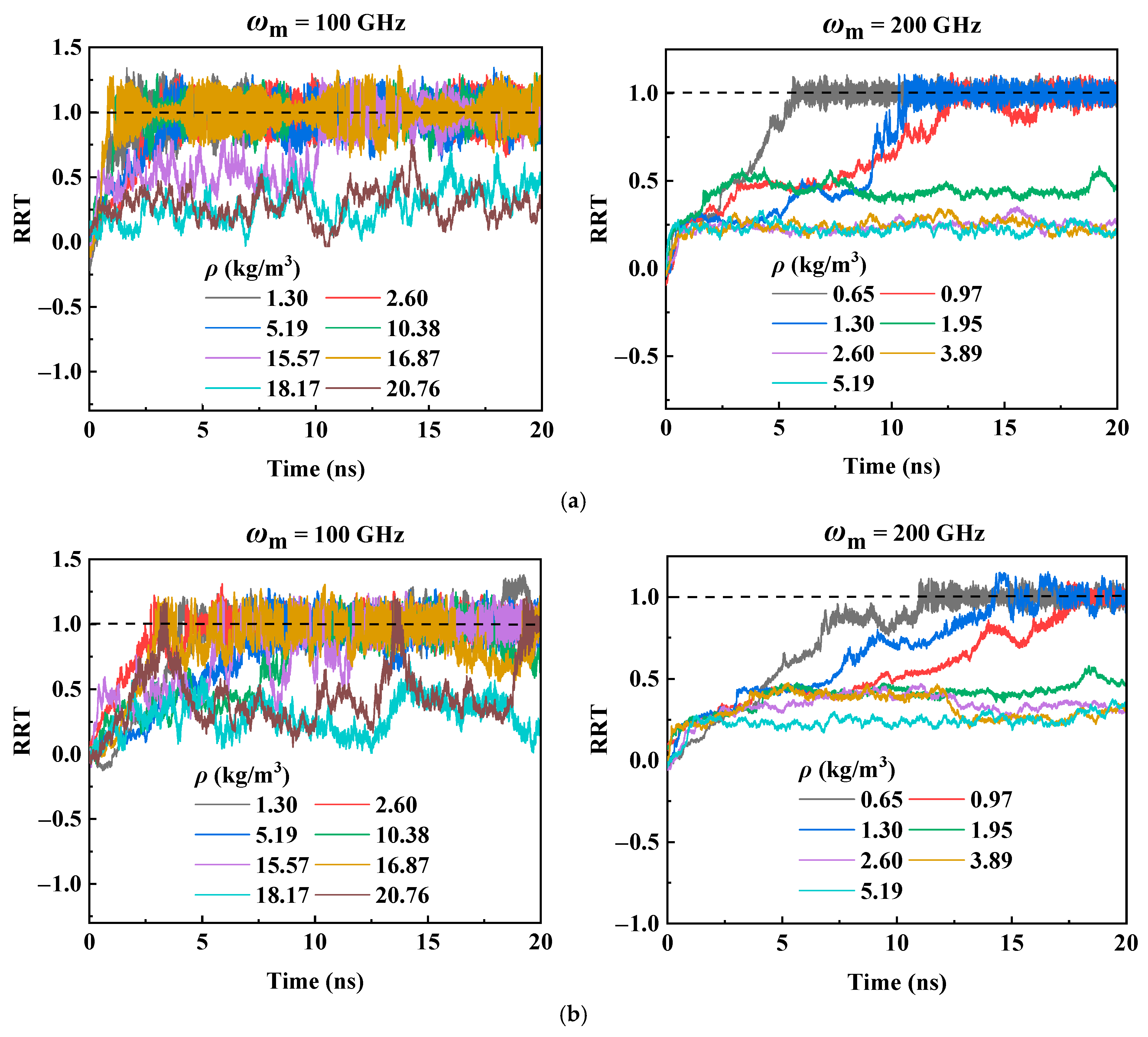
2.2. Influence of Helium Density and Input Rotational Frequency of the Motor
2.3. Influence of the Size of Simulation Box
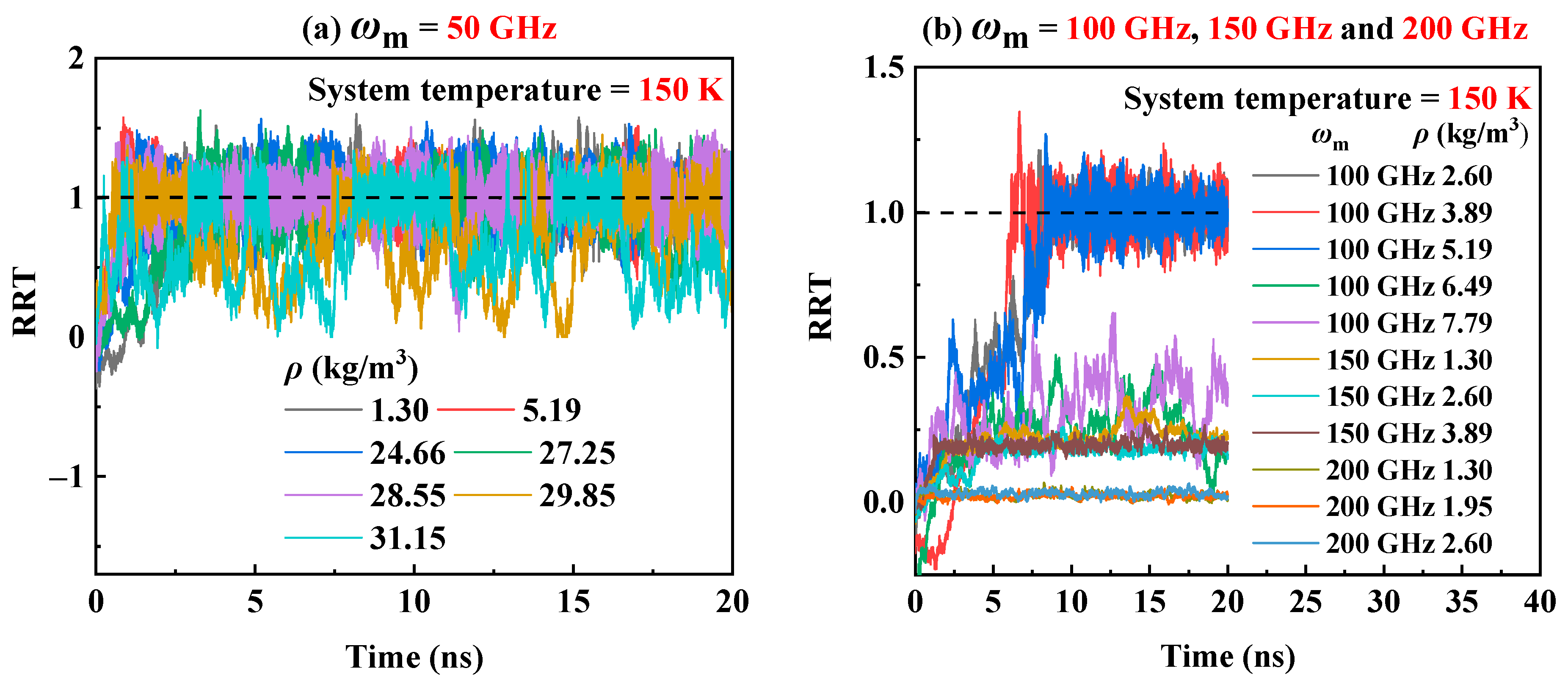
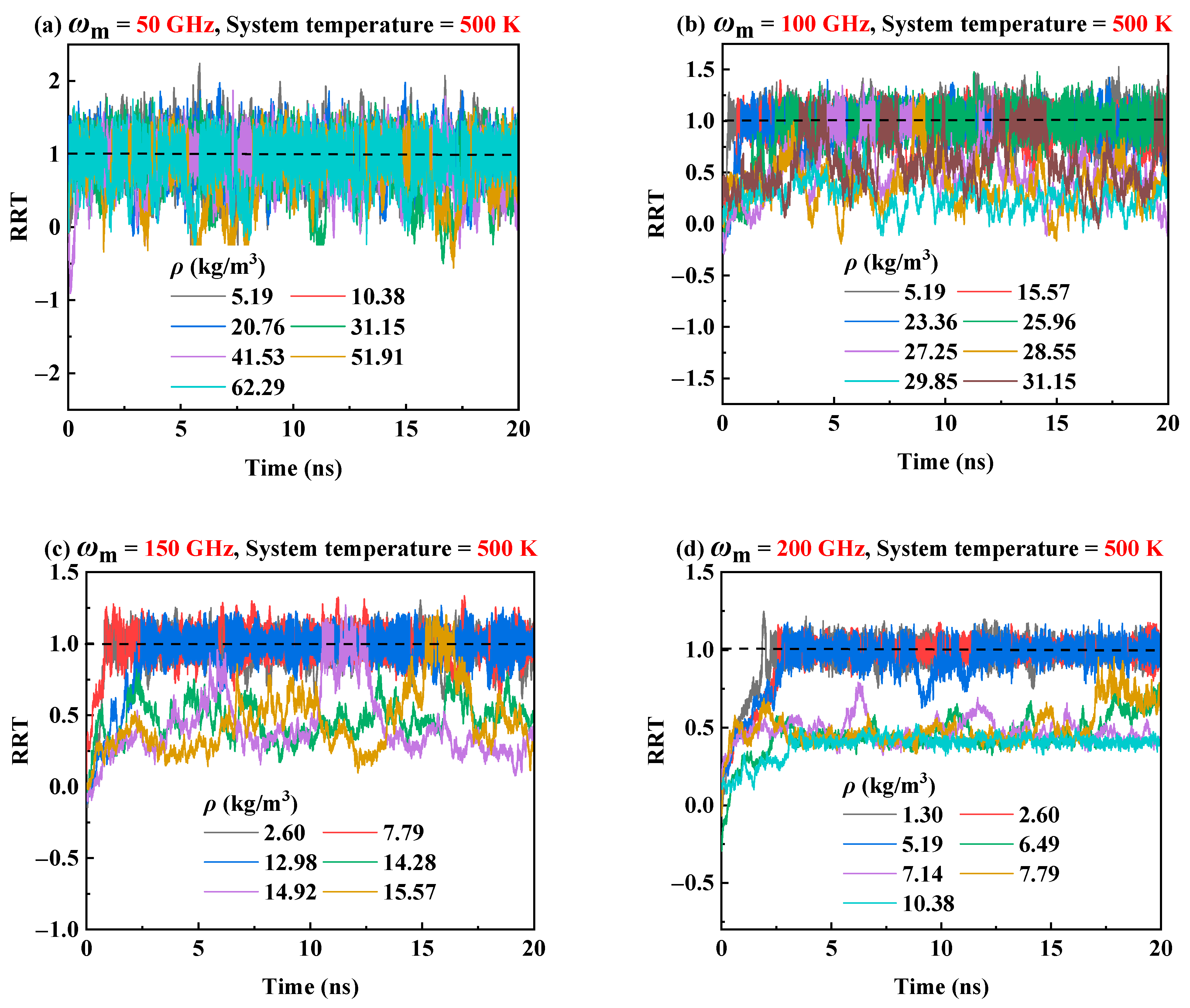
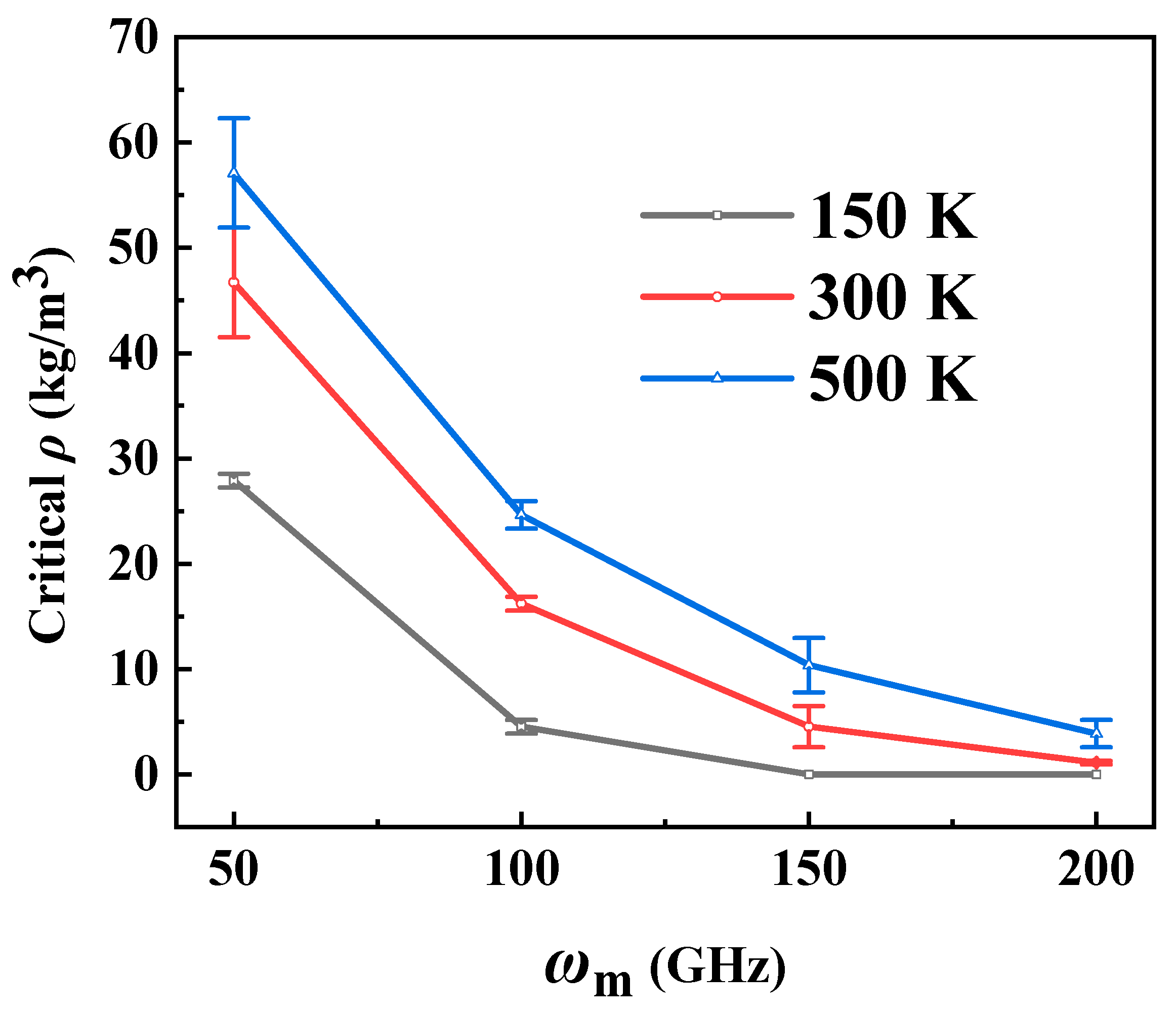
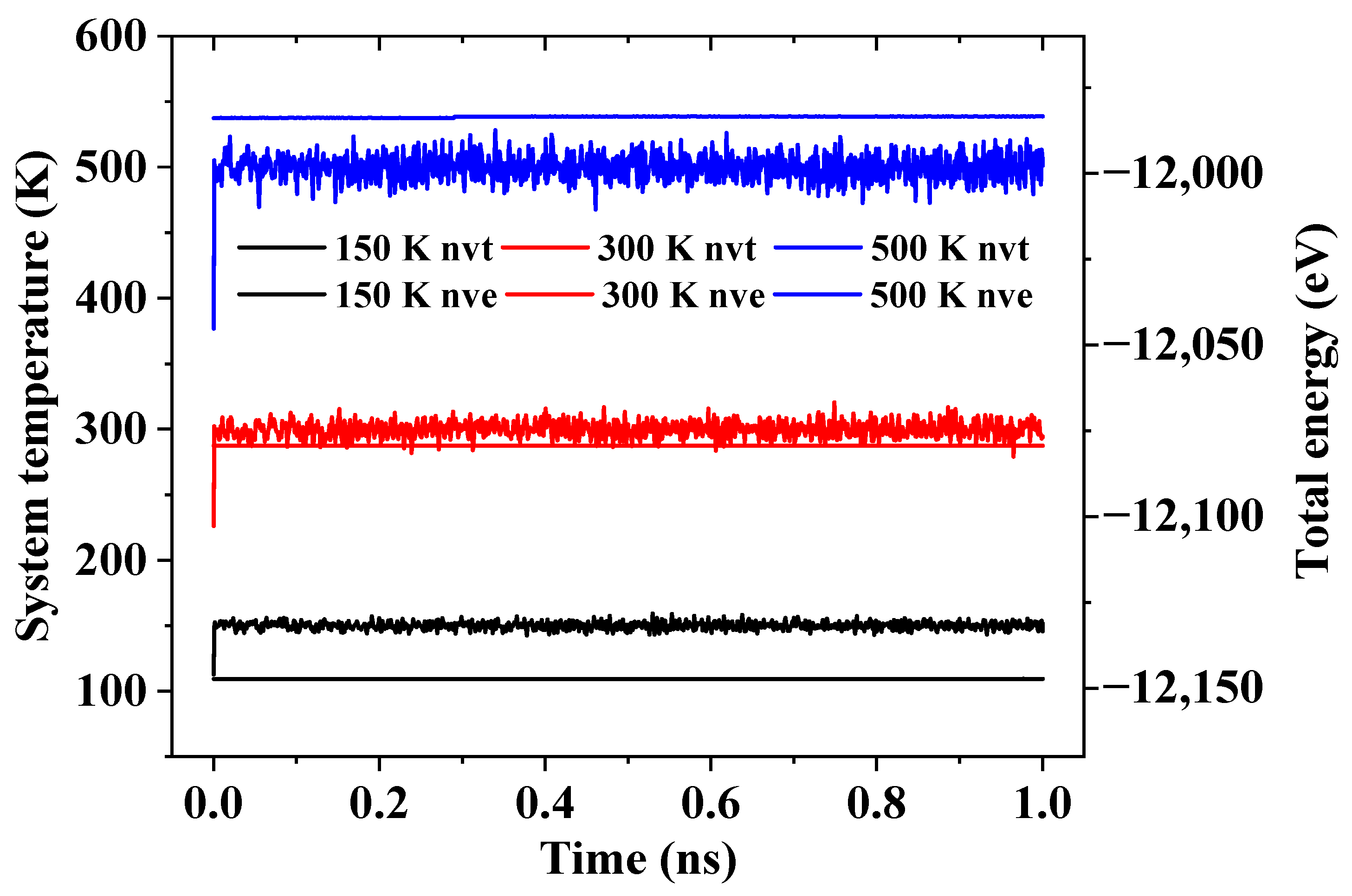
2.4. Influence of System Temperature
3. Models and Methods
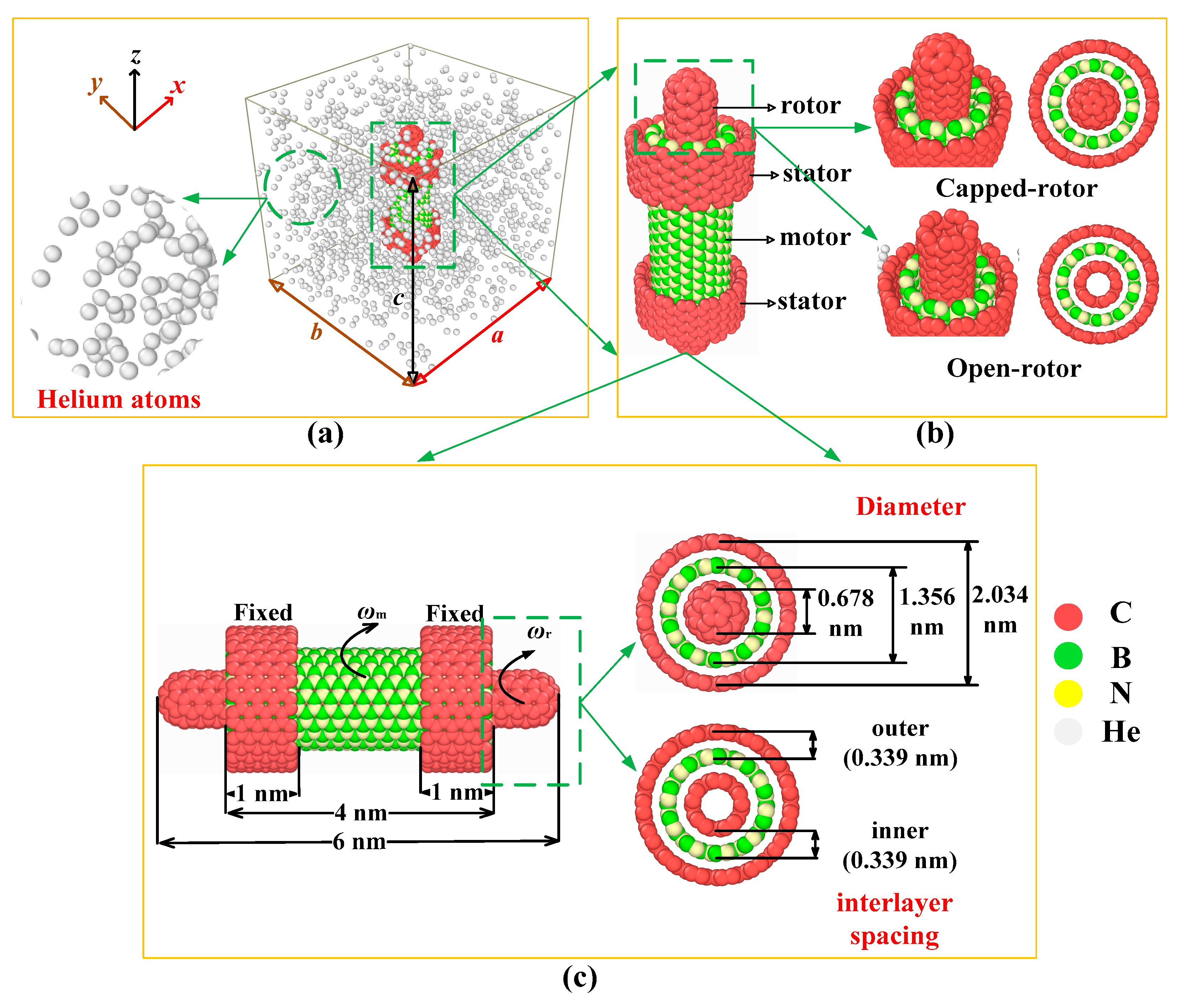
3.1. RTS Model
3.2. MD Method
3.3. Simulation Strategies
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Sample Availability
References
- Auffan, M.; Rose, J.; Bottero, J.Y.; Lowry, G.V.; Jolivet, J.P.; Wiesner, M.R. Towards a definition of inorganic nanoparticles from an environmental, health and safety perspective. Nat. Nanotechnol. 2009, 4, 634–641. [Google Scholar] [CrossRef] [PubMed]
- Yang, P.S.; Cheng, P.H.; Kao, C.R.; Chen, M.J. Novel self-shrinking mask for sub-3 nm pattern fabrication. Sci. Rep. 2016, 6, 29625. [Google Scholar] [CrossRef] [PubMed]
- Devadasu, V.R.; Bhardwaj, V.; Kumar, M.R. Can controversial nanotechnology promise drug delivery? Chem. Rev. 2012, 113, 1686–1735. [Google Scholar] [CrossRef]
- Wang, H.; Pumera, M. Fabrication of micro/nanoscale motors. Chem. Rev. 2015, 115, 8704–8735. [Google Scholar] [CrossRef] [Green Version]
- The Nobel Prize. Available online: http://nobelprize.org/nobel_prizes/chemistry/laureates/2016/press.html (accessed on 4 May 2021).
- Berman, D.; Krim, J. Surface science, MEMS and NEMS: Progress and opportunities for surface science research performed on, or by, microdevices. Prog. Surf. Sci. 2013, 88, 171–211. [Google Scholar] [CrossRef]
- Li, C.Y.; Chou, T.W. Elastic moduli of multi-walled carbon nanotubes and the effect of van der Waals forces. Compos. Sci. Technol. 2003, 63, 1517–1524. [Google Scholar] [CrossRef]
- Zhou, X.; Zhou, J.J.; Zhong, O.Y. The strain energy and young’s modulus of single-wall carbon nanotubules calculated from the electronic energy-band Theory. Phys. Rev. B 2000, 62, 13692–13696. [Google Scholar]
- Baughman, R.H.; Zakhidov, A.A.; Heer, W.A.D. Carbon nanotubes-the route toward applications. Science 2002, 297, 787–792. [Google Scholar] [CrossRef] [Green Version]
- Kociak, M.; Kasumov, A.Y.; Gueron, S.; Reulet, B.; Khodos, I.I.; Gorbatov, Y.B.; Volkov, V.T.; Vaccarini, L.; Bouchiat, H. Superconductivity in ropes of single-walled carbon nanotubes. Phys. Rev. Lett. 2001, 86, 2416–2419. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qiu, W.; Kang, Y.L.; Lei, Z.K.; Qin, Q.H.; Li, Q.; Wang, Q. Experimental study of the Raman strain rosette based on the carbon nanotube strain sensor. J. Raman Spectros. 2010, 41, 1216–1220. [Google Scholar] [CrossRef]
- Qiu, W.; Kang, Y.L.; Lei, Z.K.; Qin, Q.H.; Li, Q. A new theoretical model of a carbon nanotube strain sensor. Chin. Phys. Lett. 2009, 26, 080701. [Google Scholar]
- Biercuk, M.J.; Llaguno, M.C.; Radosavljevic, M.; Hyun, J.K.; Fischer, J.E.; Johnson, A.T.C. Carbon nanotube composites for thermal management. Appl. Phys. Lett. 2002, 80, 2767–2769. [Google Scholar] [CrossRef]
- Schoen, P.A.E.; Walther, J.H.; Arcidiacono, S.; Poulikakos, D.; Koumoutsakos, P. Nanoparticle traffic on helical tracks: Thermophoretic mass transport through carbon nanotubes. Nano Lett. 2006, 6, 1910–1917. [Google Scholar] [CrossRef]
- Lau, K.T. Interfacial bonding characteristics of nanotube/polymer composites. Chem. Phys. Lett. 2003, 370, 399–405. [Google Scholar] [CrossRef]
- Treacy, M.M.J.; Ebbesen, T.W.; Gibson, J.M. Exceptionally high Young’s modulus observed for individual carbon nanotubes. Nature 1996, 381, 678–680. [Google Scholar] [CrossRef]
- Yu, M.F.; Lourie, O.; Dyer, M.J.; Moloni, K.; Kelly, T.F.; Ruoff, R. Strength and breaking mechanism of multiwalled carbon nanotubes under tensile load. Science 2000, 287, 637–640. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cumings, J.; Zettl, A. Low-friction nanoscale linear bearing realized from multiwall carbon nanotubes. Science 2000, 289, 602–604. [Google Scholar] [CrossRef]
- Zhang, R.; Ning, Z.Y.; Zhang, Y.Y.; Zheng, Q.S.; Chen, Q.; Xie, H.H.; Zhang, Q.; Qian, W.Z.; Wei, F. Superlubricity in centimetres-long double-walled carbon nanotubes under ambient conditions. Nat. Nanotechnol. 2013, 8, 912–916. [Google Scholar] [CrossRef] [PubMed]
- Jiang, W.G.; Zeng, Y.H.; Qin, Q.H.; Luo, Q.H. A novel oscillator based on heterogeneous carbon@MoS2 nanotubes. Nano Res. 2016, 9, 1775–1784. [Google Scholar] [CrossRef]
- Lin, Y.W.; Jiang, W.G.; Qin, Q.H.; Chen, Y.J. A novel dual-signal output screwing oscillator based on carbon@MoS2 nanotubes. Appl. Phys. Express 2019, 12, 065001. [Google Scholar] [CrossRef]
- Bourlon, B.; Glattli, C.; Bachtold, A.; Forró, L. Carbon nanotube based bearing for rotational motions. Nano Lett. 2004, 4, 709–712. [Google Scholar] [CrossRef] [Green Version]
- Barreiro, A.; Rurali, R.; Hernandez, E.R.; Moser, J.; Pichler, T.; Forró, L.; Bachtold, A. Subnanometer motion of cargoes driven by thermal gradients along carbon nanotubes. Science 2008, 320, 775–778. [Google Scholar] [CrossRef] [Green Version]
- Fennimore, A.M.; Yuzvinsky, T.D.; Han, W.Q.; Fuhrer, M.S.; Cumings, J.; Zettl, A. Rotational actuators based on carbon nanotubes. Nature 2003, 424, 408–410. [Google Scholar] [CrossRef]
- Holek, I.S.; Reguera, D.; Rubi, J.M. Carbon-nanotube-based motor driven by a thermal gradient. J. Phys. Chem. C 2013, 117, 3109–3113. [Google Scholar] [CrossRef]
- Ershova, O.V.; Lebedeva, I.V.; Lozovik, Y.E.; Popov, A.M.; Knizhnik, A.A.; Potapkin, B.V.; Bubel, O.N.; Kislyakov, E.F.; Poklonskii, P.A. Nanotube-based nanoelectromechanical systems: Control versus thermodynamic fluctuations. Phys. Rev. B 2010, 81, 155453. [Google Scholar] [CrossRef] [Green Version]
- Alder, B.J.; Wainwright, T.E. Studies in molecular dynamics. I. General method. J. Chem. Phys. 1959, 31, 459–466. [Google Scholar] [CrossRef] [Green Version]
- Nosé, S. A unifed formulation of the constant temperature molecular dynamics methods. J. Chem. Phys. 1984, 81, 511–519. [Google Scholar] [CrossRef] [Green Version]
- Tuzun, R.E.; Noid, D.W.; Sumpter, B.G. Dynamics of a laser driven molecular motor. Nanotechnology 1995, 6, 52. [Google Scholar] [CrossRef]
- Král, P.; Sadeghpour, H.R. Laser spinning of nanotubes: A path to fast-rotating microdevices. Phys. Rev. B 2002, 65, 161401. [Google Scholar] [CrossRef] [Green Version]
- Tu, Z.C.; Hu, X. Molecular motor constructed from a double-walled carbon nanotube driven by axially varying voltage. Phys. Rev. B 2005, 72, 3404. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Vukovic, L.; Kral, P. Nanoscale rotary motors driven by electron tunneling. Phys. Rev. Lett. 2008, 101, 186808. [Google Scholar] [CrossRef] [Green Version]
- Kang, J.W.; Hwang, H.J. Nanoscale carbon nanotube motor schematics and simulations for micro-electro-mechanical machines. Nanotechnology 2004, 15, 1633–1638. [Google Scholar] [CrossRef]
- Kang, J.W.; Hwang, H.J.; Lee, H.J.; Lee, J.H. Fluidic gas-driven carbon-nanotube motor: Molecular dynamics simulations. J. Kor. Phys. Soc. 2004, 45, 573–576. [Google Scholar]
- Cai, K.; Li, Y.; Qin, Q.H.; Yin, H. Gradientless temperature-driven rotating motor from a double-walled carbon nanotube. Nanotechnology 2014, 25, 505701. [Google Scholar] [CrossRef] [PubMed]
- Cai, K.; Yu, J.Z.; Wan, J.; Shi, J.; Qin, Q.H. Configuration jumps of rotor in a nanomotor from carbon nanostructures. Carbon 2016, 101, 168–176. [Google Scholar] [CrossRef]
- Yin, H.; Cai, K.; Wei, N.; Qin, Q.H.; Shi, J. Study on the dynamics responses of a transmission system made from carbon nanotubes. J. Appl. Phys. 2015, 117, 234305. [Google Scholar] [CrossRef] [Green Version]
- Cai, K.; Yin, H.; Wei, N.; Chen, Z.; Shi, J. A stable high-speed rotational transmission system based on nanotubes. Appl. Phys. Lett. 2015, 106, 602. [Google Scholar] [CrossRef]
- Cai, K.; Yin, H.; Qin, Q.H.; Li, Y. Self-excited oscillation of rotating double-walled carbon nanotubes. Nano Lett. 2014, 14, 2558–2562. [Google Scholar] [CrossRef]
- Shi, J.; Cai, H.F.; Cai, K.; Qin, Q.H. Dynamic behavior of a black phosphorus and carbon nanotube composite system. J. Phys. D Appl. Phys. 2017, 50, 025304. [Google Scholar] [CrossRef]
- Jin, H.L.; Duan, H.Y.; Shi, J. Reversing rotation of a nanomotor by introducing a braking BNC nanotube. Comput. Mater. Sci. 2019, 159, 327–332. [Google Scholar] [CrossRef]
- Zhang, X.N.; Cai, K.; Shi, J.; Qin, Q.H. Friction effect of stator in a multi-walled CNT-based rotation transmission system. Nanotechnology 2018, 29, 045706. [Google Scholar] [CrossRef] [Green Version]
- Zheng, P.; Jiang, W.G.; Lin, Y.W.; Chen, Y.J.; Qin, Q.H.; Li, D.S. A novel rotation transmission nano-system based on Carbon@Boron-Nitride@Carbon heterogeneous nanotubes: A molecular dynamics study. Comput. Mater. Sci. 2021, 196, 110517. [Google Scholar] [CrossRef]
- Lee, C.H.; Bhandari, S.; Tiwari, B.; Yapici, N.; Zhang, D.Y.; Yap, Y.K. Boron nitride nanotubes: Recent advances in their synthesis, functionalization, and applications. Molecules 2016, 21, 922. [Google Scholar] [CrossRef]
- Wang, J.S.; Kayastha, V.K.; Yap, Y.K.; Fan, Z.Y.; Lu, J.G.; Pan, Z.W.; Ivanov, I.N.; Puretzky, A.A.; Geohegan, D.B. Low temperature growth of boron nitride nanotubes on substrates. Nano Lett. 2005, 5, 2528–2532. [Google Scholar] [CrossRef]
- Grant, J.T.; Carrero, C.A.; Goeltl, F.; Venegas, J.; Mueller, P.; Burt, S.P.; Specht, S.E.; McDermott, W.P.; Chieregato, A.; Hermans, I. Selective oxidative dehydrogenation of propane to propene using boron nitride catalysts. Science 2016, 354, 1570–1573. [Google Scholar] [CrossRef]
- Salvetti, A.; Rossi, L.; Iacopetti, P.; Li, X.; Nitti, S.; Pellegrino, T.; Mattoli, V.; Golberg, D.; Ciofani, G. In vivo biocompatibility of boron nitride nanotubes: Effects on stem cell biology and tissue regeneration in planarians. Nanomedicine 2015, 10, 1911–1922. [Google Scholar] [CrossRef] [Green Version]
- Wu, H.S.; Jia, Y.F. Research progress of boron nitride nanotubes. Prog. Chem. 2001, 16, 6–14. [Google Scholar]
- Jing, L.; Tay, R.; Li, H.L.; Tsang, S.H.; Huang, J.F.; Tan, D.; Zhang, B.W.; Teo, E.H.T.; Tok, A.L.Y. Coaxial carbon@boron nitride nanotube arrays with enhanced thermal stability and compressive mechanical properties. Nanoscale 2016, 8, 11114–11122. [Google Scholar] [CrossRef] [Green Version]
- Jing, L.; Samani, M.K.; Liu, B.; Li, H.L.; Tay, R.Y.J.; Tsang, S.H.; Cometto, O.; Nylander, A.; Liu, J.; Teo, E.H.T.; et al. Thermal conductivity enhancement of coaxial carbon@boron nitride nanotube arrays. ACS Appl. Mater. Interfaces 2017, 9, 14555–14560. [Google Scholar]
- Thamwattana, N.; Hill, J.M. Nanotube bundle oscillators: Carbon and boron nitride nanostructures. Physica B 2009, 404, 3906–3910. [Google Scholar] [CrossRef]
- Shi, J.; Wu, P.W.; Li, X.; Cai, K.; Zhang, Y.Y. Efficiency of CNT-based rotation transmission nanosystem in water. Nanotechnology 2021, 32, 245401. [Google Scholar] [CrossRef] [PubMed]
- Cai, K.; Shi, J.; Yu, J.; Qin, Q.H. Dynamic behavior of a rotary nanomotor in argon environments. Sci. Rep. 2018, 8, 3511. [Google Scholar] [CrossRef] [PubMed]
- Shi, J.; Li, Y.; Wang, A.; Cai, K. Rotational behavior of a nanoring protected by argon. Comput. Mater. Sci. 2018, 154, 132. [Google Scholar] [CrossRef]
- Weber, N.C.; Smit, K.F.; Hollmann, M.W.; Preckel, B. Targets involved in cardioprotection by the non-anesthetic noble gas helium. Curr. Drug Targets 2015, 16, 786–792. [Google Scholar] [CrossRef] [PubMed]
- Surin, L.A.; Potapov, A.V.; Dumesh, B.S.; Schlemmer, S.; Xu, Y.; Raston, P.L.; Jager, W. Rotational study of carbon monoxide solvated with helium atoms. Phys. Rev. Lett. 2008, 101, 233401. [Google Scholar] [CrossRef]
- Gupta, V. Graphene as intermediate phase in fullerene and carbon nanotube growth: A Young-Laplace surface-tension model. Appl. Phys. Lett. 2010, 97, 181910. [Google Scholar] [CrossRef] [Green Version]
- Jost, O.; Gorbunov, A.A.; Ciacchi, L.C.; Pompe, W.; Liu, X.; Pichler, T.; Dunsch, L.; Golden, M.S.; Fink, J. Optical absorption study of factors influencing the carbon nanotube nucleation process. AIP Conf. Proc. 2001, 591, 341–344. [Google Scholar]
- Hinkov, I.; Farhat, S.; Chapelle, M.L.; Fan, S.S.; Han, H.X.; Li, G.H.; Scott, C.D. Optical Plasma Control during ARC Carbon Nanotube Growth; NASA: Houston, TX, USA, 2001.
- Plimpton, S. Fast parallel algorithms for short-range molecular dynamics. J. Comput. Phys. 1995, 117, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Harrison, J.A.; White, C.T.; Colton, R.J.; Brenner, D.W. Molecular-dynamics simulations of atomic-scale friction of diamond surfaces. Phys. Rev. B 1992, 46, 9700–9708. [Google Scholar] [CrossRef]
- Brenner, D.W.; Shenderova, O.A.; Harrison, J.A.; Stuart, S.J.; Ni, B.; Sinnott, S.B. A second-generation reactive empirical bond order (REBO) potential energy expression for hydrocarbons. J. Phys. Condens. Matter 2002, 14, 783–802. [Google Scholar] [CrossRef]
- Kinaci, A.; Haskins, J.B.; Sevik, C.; Cagin, T. Thermal conductivity of BN-C nanostructures. Phys. Rev. B 2012, 86, 115410. [Google Scholar] [CrossRef] [Green Version]
- Hummer, G.; Rasaiah, J.G.; Noworyta, J.P. Water conduction through the hydrophobic channel of a carbon nanotube. Nature 2001, 414, 188–190. [Google Scholar] [CrossRef]
- Hilder, T.A.; Gordon, D.; Chung, S. Salt rejection and water transport through boron nitride nanotubes. Small 2009, 5, 2183–2190. [Google Scholar] [CrossRef]
- Lee, C.W.; Chernatynskiy, A.; Shukla, P.; Stoller, R.E.; Sinnott, S.B.; Phillpot, S.R. Effect of pores and He bubbles on the thermal transport properties of UO2 by molecular dynamics simulation. J. Nucl. Mater. 2015, 456, 253–259. [Google Scholar] [CrossRef] [Green Version]
- Tomar, D.S.; Singla, M.; Gumma, S. Potential parameters for helium adsorption in silicalite. Microporous Mesoporous Mater. 2011, 142, 116–121. [Google Scholar] [CrossRef]
- Rouha, M.; Nezbeda, I. Non-Lorentz-Berthelot Lennard-Jones mixtures: A systematic study. Fluid Phase Equilib. 2009, 277, 42–48. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 8 nm × 8 nm × 8 nm | ρ (kg/m3) | 0.65 | 0.97 | 1.30 | 1.95 | 2.60 | 3.89 | 5.19 | 6.49 | 7.14 |
| 7.79 | 10.38 | 12.98 | 14.28 | 14.92 | 15.57 | 16.87 | 18.17 | 20.76 | ||
| 23.36 | 24.66 | 25.96 | 27.25 | 28.55 | 29.85 | 31.15 | 41.53 | 51.91 | ||
| 62.29 | ||||||||||
| Number of atoms | 50 | 75 | 100 | 150 | 200 | 300 | 400 | 500 | 550 | |
| 600 | 800 | 1000 | 1100 | 1150 | 1200 | 1300 | 1400 | 1600 | ||
| 1800 | 1900 | 2000 | 2100 | 2200 | 2300 | 2400 | 3200 | 4000 | ||
| 4800 | ||||||||||
| 16 nm × 16 nm × 8 nm | ρ (kg/m3) | 0.65 | 0.97 | 1.30 | 1.95 | 2.60 | 3.89 | 5.19 | 10.38 | 15.57 |
| 16.87 | 18.17 | 20.76 | ||||||||
| Number of atoms | 200 | 300 | 400 | 600 | 800 | 1200 | 1600 | 3200 | 4800 | |
| 5200 | 5600 | 6400 | ||||||||
| 32 nm × 32 nm × 8 nm | ρ (kg/m3) | 0.65 | 0.97 | 1.30 | 1.95 | 2.60 | 3.89 | 5.19 | 10.38 | 15.57 |
| 16.87 | 18.17 | 20.76 | ||||||||
| Number of atoms | 800 | 1200 | 1600 | 2400 | 3200 | 4800 | 6400 | 12,800 | 19,200 | |
| 20,800 | 22,400 | 25,600 |
| Atom i-j | ε (eV) | σ (nm) |
|---|---|---|
| C-C | 0.00373 | 0.3400 |
| B-B | 0.00411 | 0.3453 |
| N-N | 0.00628 | 0.3365 |
| He-He | 0.00219 | 0.2559 |
| C-B | 0.00391 | 0.3427 |
| C-N | 0.00484 | 0.3383 |
| C-He | 0.00285 | 0.2980 |
| B-He | 0.00300 | 0.3006 |
| N-He | 0.00370 | 0.2962 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, P.; Jiang, W.; Qin, Q.; Li, D. Dynamic Behavior of Rotation Transmission Nano-System in Helium Environment: A Molecular Dynamics Study. Molecules 2021, 26, 5199. https://doi.org/10.3390/molecules26175199
Zheng P, Jiang W, Qin Q, Li D. Dynamic Behavior of Rotation Transmission Nano-System in Helium Environment: A Molecular Dynamics Study. Molecules. 2021; 26(17):5199. https://doi.org/10.3390/molecules26175199
Chicago/Turabian StyleZheng, Pan, Wugui Jiang, Qinghua Qin, and Duosheng Li. 2021. "Dynamic Behavior of Rotation Transmission Nano-System in Helium Environment: A Molecular Dynamics Study" Molecules 26, no. 17: 5199. https://doi.org/10.3390/molecules26175199
APA StyleZheng, P., Jiang, W., Qin, Q., & Li, D. (2021). Dynamic Behavior of Rotation Transmission Nano-System in Helium Environment: A Molecular Dynamics Study. Molecules, 26(17), 5199. https://doi.org/10.3390/molecules26175199