
Data Gathering in Delay Tolerant Wireless Sensor Networks Using a Ferry




Abstract
:1. Introduction
2. Background Work
2.1. Path Determination
2.2. Scheduling the Dispatch of the Ferry
3. Ferry Node Ranking Clustering Algorithm (FNRCA)

3.1. Node Ranking Clustering Algorithm
3.2. Description of the Algorithm
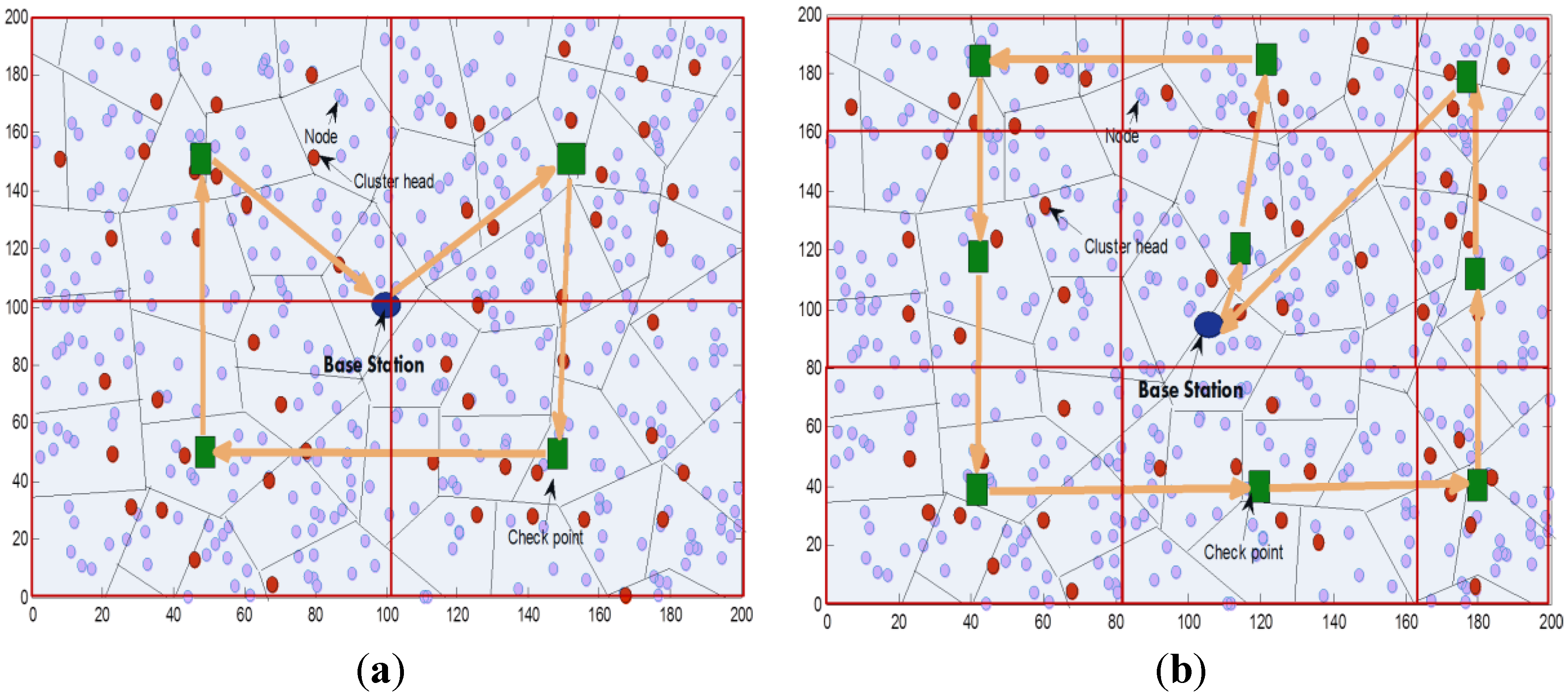
- The BS divides the sensing field into smaller partitions called clusters based on the assumed communication/sensing range of the nodes.
- The sensing field will then be divided into virtual square grids based on the specified sensing range. Each virtual grid will be of size where is the sensing range. Multiple clusters fall within one or more virtual grids.
- Initially, a ferry checkpoint (virtual base station) is placed at the center of each virtual grid.
- Initially NRCA is used to choose CHs based on their location from the ferry’s checkpoints.
- Nodes and cluster heads will associate themselves with the ferry’s checkpoint based on their location within each virtual grid.
- Border line nodes and cluster heads will be associated with cluster heads and checkpoints closer to them based on distance respectively.
- After the initial phase, NRCA is applied on each virtual grid based on the position of the ferry’s checkpoint and energy values of the associated nodes. Therefore, the energy consumed per virtual grid will be minimized. This is explained below in the subsequent sections.
- The ferry will be dispatched from the BS to visit all checkpoints and return back to the BS using a Hamilton cycle as will be shown later.
- At each checkpoint the ferry stops to collect gathered data from cluster heads associated with this checkpoint. Gathered data consists of sensed data and control information like nodes energy values and nodes GPS locations.
- Dissemination of data from cluster heads to the ferry is triggered by a control message communicated by the ferry to the cluster heads associated with each checkpoint. The time the ferry will stay for at each checkpoint is determined based on several parameters as will be shown later.
- In the subsequent rounds of dispatching the ferry, the BS choses the new locations of the checkpoints based on the collected information to minimize the energy of the overall sensing field as will be shown later. The BS will then determine the new path of the ferry using Hamilton cycle as was done in the initial phase.
3.3. Cluster Head Selection Process
3.4. Ferry Checkpoints Locations
- ○
- Input: a subset of cluster heads CPch in each virtual grid, the virtual grid dimensions and the sensing range r between the ferry and clusters heads;
- ○
- Output: if the subset of all cluster heads which can be covered by a circle with a radius at most r, return the circle’s center (Equations (3) and (4)) or false otherwise and no change in the checkpoint position i.e., it will be its previous position.
- ○
- if
- ○
- radius > r then
- ○
- return false; // no change in checkpoint position
- ○
- else
- ○
- center(x, y) = (Equations (3) and (4))
- ○
- return center. // checkpoint position will be the center (x, y)
- ○
- end if
3.5. Stopping Time of the Ferry at Each Checkpoint
3.6. Problem Formulation
3.7. Checkpoints Weighting Scheme
- Checkpoints with larger number of attached cluster heads:
- Checkpoints closer to the Base Station:
- Checkpoints closer to each other:
- ○
- Input: a set of checkpoints, their attached cluster heads.
- ○
- Output: A sequence of checkpoint for the ferry to follow.
- ○
- //Optimal Travelling_Salesman_Problem_tour
- ○
- while there exist checkpoints do
- ○
- for all CPj (j = 1, 2, ..., m − 1) dofind the weight W from Equation (15).
- ○
- End for
- ○
- Select CP with maximum weight
- ○
- Add it to the TSPtour list {CPj,CPj + 1…}
- ○
- Remove it from the set
- ○
- end while
- ○
- return TSPtour
3.8. Applying a Genetic Algorithm to Elect a Path
- ○
- Input: p(t) and c(t) are parents paths and offspring candidate paths in current generation t.
- ○
- // Input will be taken from the previous pseudocode
- ○
- Output: The optimum solution TSP.
- ○
- T←0;
- ○
- Initialize p(t);
- ○
- Evaluate p(t);
- ○
- While (there exist p(t)) do
- ○
- Perform crossover and mutation p(t) to get c(t);
- ○
- Evaluate c(t) with the fitness function(c(t));
- ○
- Select p(t + 1) from p(t) and c(t);
- ○
- T ← t + 1;
- ○
- End While
- ○
- End
3.8.1. Crossover Operation
- Partition each path into three segments (left, middle, right)1st Path = (1 2 3 | 4 5 6 7 | 8 9)2nd Path = (4 5 2 | 1 8 7 6 | 9 3)
- Copy the middle segment of both paths, the two candidate paths become as follow:1st candidate path = (- - - | 4 5 6 7 | - -)2nd candidate path = (- - - | 1 8 7 6 | - -)
- Reorder each of the sequences starting from the right segments according to their order in the second path without repeating the already copied numbers (9-3-2-1-8). As 4, 5 7 and 6 are already copied.
- Place the ordered sequence into the path starting from the right segment.1st candidate path = (2 1 8 | 4 5 6 7 | 9 3)
- Generate new candidate paths as:1st candidate path = (2 1 8 | 4 5 6 7 | 9 3)2nd candidate path = (3 4 5 | 1 8 7 6 | 9 2)
3.8.2. Mutation Operator
3.8.3. Fitness Function
4. Performance Evaluation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| N = 400 | Total number of sensor nodes |
| Eo = 0.5J/node | Initial energy of each node |
| Eelec = 50nJ/bit | Per bit energy consumption |
| EDA = 5nJ/bit | Energy for data aggregation |
| Eamp = 100 pJ/bit/ | Amplifier transmitting energy |
| Area = 200 × 200 | Area used in the simulation in meters |
| # Checkpoints | Varies according to the sensing range and the area : Area/sensing Raduis r |
| Packet size | 256 bits |
| Data Rate | 256 Kbps |
| Sensing Radius: r | 50 m, Zigbee has a max of 100 m |
| Buffer size | 256 K Bytes |
| Tmax | Time of the longest tour of the ferry` |
| Ferry_speed | 100 m/min |
4.1. Simulated Scenarios

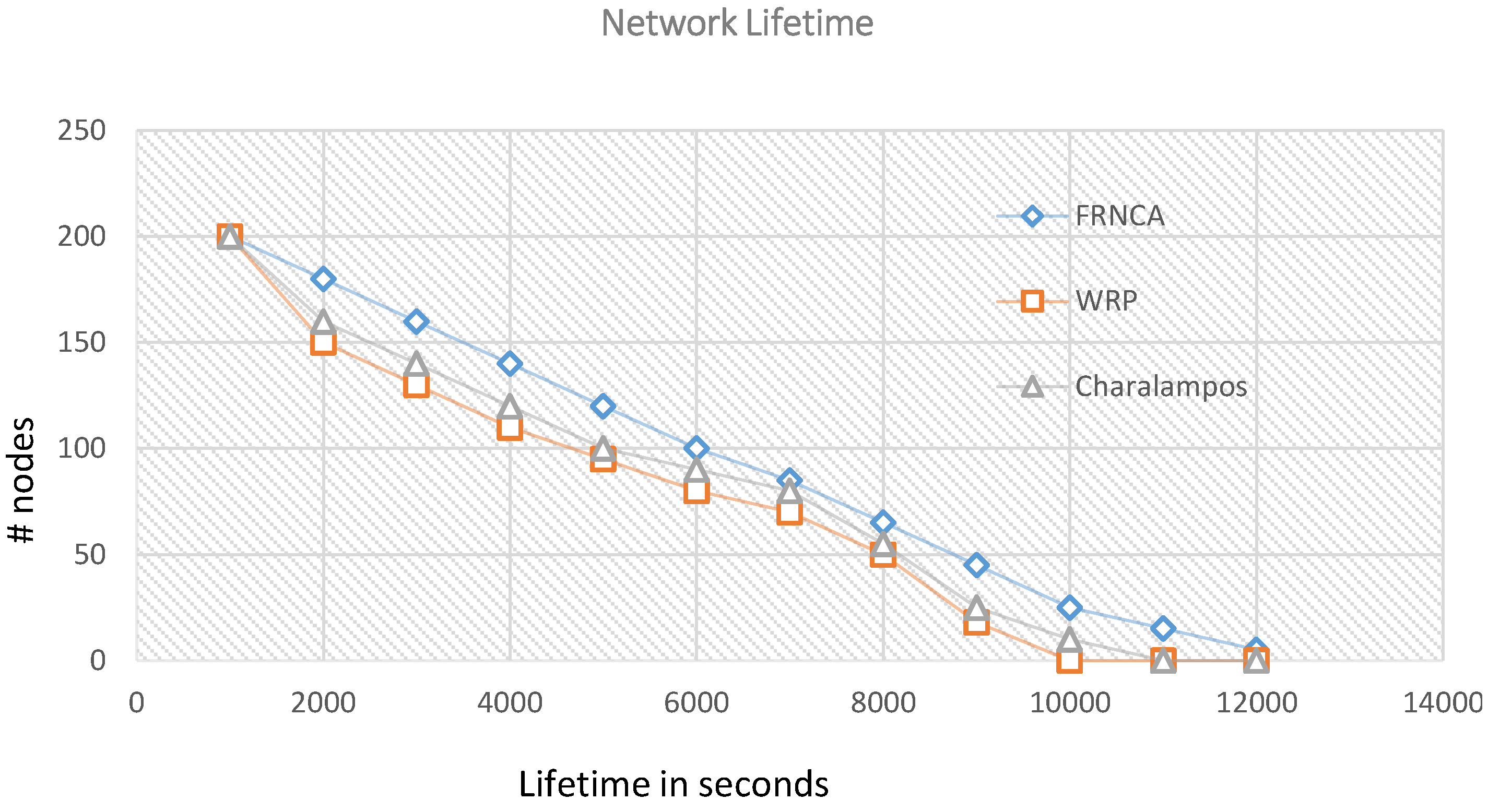
4.2. Performance Based on Network Lifetime
| Protocols | Measurements | |
|---|---|---|
| Round First Node Dies | Round Last Node Dies | |
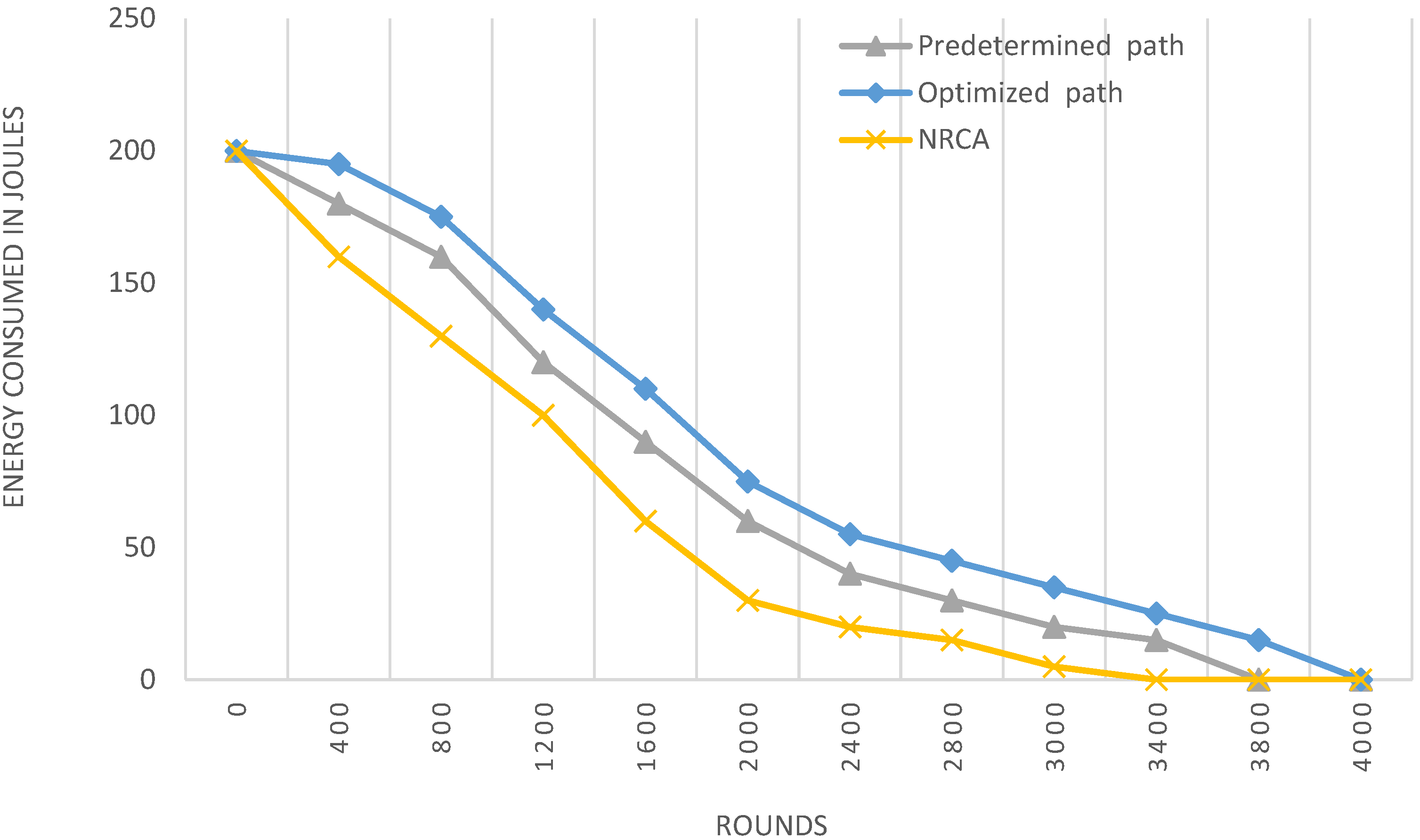
| Optimized path | 2010 | 4003 |
| Predetermined path | 1763 | 3830 |
| NRCA | 1300 | 3311 |
4.3. Performance Based on Energy Consumed

4.4. The Overall Time of One Round Trip of the Ferry
| Predetermined Path | Optimized Path | |
|---|---|---|
| Time in minutes | 5.40 | 4 |
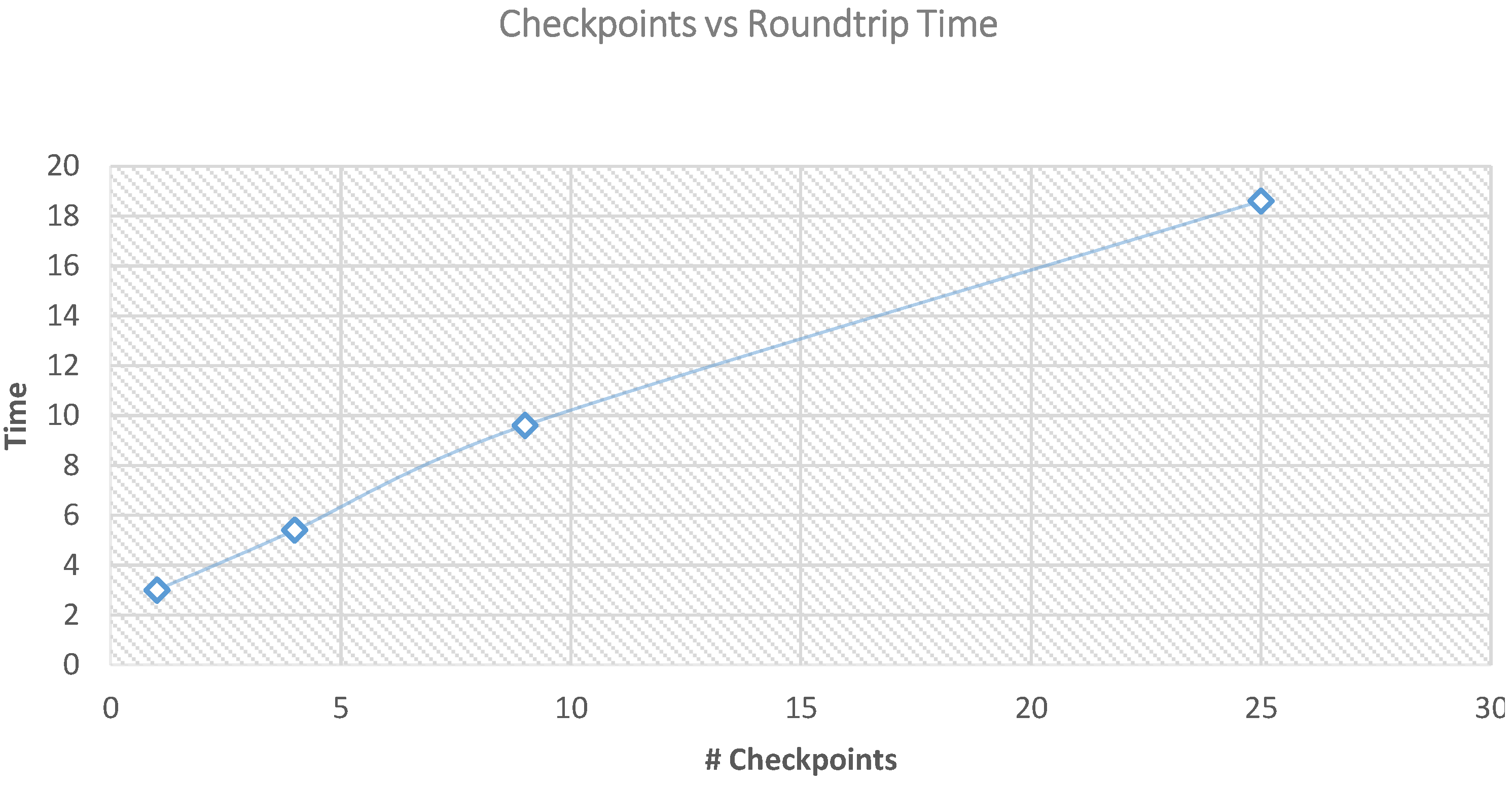
4.5. Changing the Number of Checkpoints
| #Checkpoints | Measurements | |
|---|---|---|
| Round First Node Dies | Round Last Node Dies | |
| Sensing range 20 #Checkpoint 25 | 2460 | 4433 |
| Sensing range 40 #Checkpoint 9 | 2111 | 4120 |
| Sensing range 50 #Checkpoint 4 | 2010 | 4003 |
| Sensing range 100 #Checkpoint 1 | 1400 | 3500 |
| #Checkpoints | Time in minutes |
|---|---|
| Sensing range 20 #Checkpoint 25 | 18.60 |
| Sensing range 40 #Checkpoint 9 | 9.60 |
| Sensing range 50 #Checkpoint 4 | 5.40 |
| Sensing range 100 #Checkpoint 1 which is the base station | 3 |

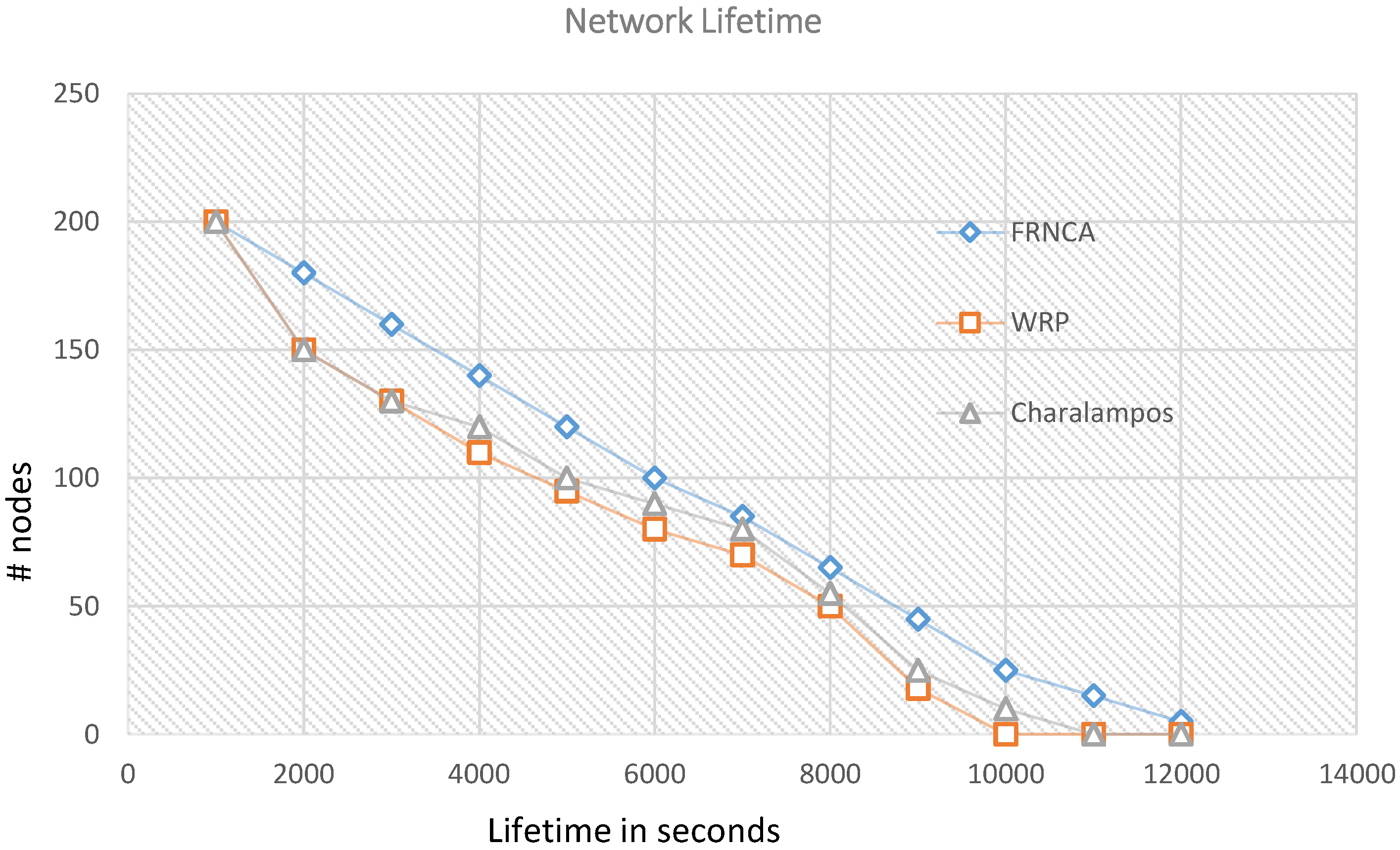
4.6. Performance Evaluation of FNRCA against other Algorithms
| Notation |
|---|
| N = 200 |
| Initital node energy, Eo = uniformly selected for the nodes from 50–100 J / node |
| Area = 200 × 200 |
| # Checkpoints = 25 |
| Packet size = 30 Bytes |
| Data Rate = 40 Kbps |
| Sensing Radius : r = 20 m |
| Ferry_speed = 1 m/s |


5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. A survey on sensor networks. IEEE Commun. Mag. 2002, 40, 102–114. [Google Scholar] [CrossRef]
- Baronti, P.; Pillai, P.; Chook, V.W.C.; Chessa, S.; Gotta, A.; Hu, Y.F. Wireless sensor networks: A survey on the state of the art and the 802.15. 4 and ZigBee standards. Comput. Commun. 2007, 30, 1655–1695. [Google Scholar] [CrossRef]
- Alnuaimi, M.; Sallabi, F.; Shuaib, K. A Survey of Wireless Multimedia Sensor Networks Challenges and Solutions. In Proceedings of the IEEE International Conference on Innovations in Information Technology (IIT’11), Abu Dhabi, United Arab Emirates, 25–27 April 2011; pp. 191–196.
- Alnuaimi, M.; Shuaib, K.; Al Nuaimi, K.; Abdel-Hafez, M. Data gathering in Wireless Sensor Networks with ferry nodes. In Proceedings of the 12th IEEE International Conference on Networking, Sensing and Control (ICNSC15), Taipei, China, 9–11 April 2015; pp. 221–225.
- Al Nuaimi, K.; Al Nuaimi, M.; Mohamed, N.; Jawhar, I.; Shuaib, K. Web-based wireless sensor networks: A survey of architectures and applications. In Proceedings of the 6th International Conference on Ubiquitous Information Management and Communication, Kuala Lumpur, Malaysia, 20–22 February 2012.
- García Villalba, L.J.; Sandoval Orozco, A.L.; Triviño Cabrera, A.; Barenco Abbas, C.J. Routing protocols in wireless sensor networks. Sensors 2009, 9, 8399–8421. [Google Scholar] [CrossRef] [PubMed]
- Alnuaimi, M.; Shuaib, K.; Alnuaimi, K.; Abed-Hafez, M. Clustering in Wireless Sensor Networks Based on Node Ranking. In Proceedings of the 2014 International Wireless Communications and Mobile Computing Conference (IWCMC), Nicosia, Cyprus, 4–8 August 2014; pp. 488–493.
- Al Nuaimi, M.; Shuaib, K.; Al Nuaimi, K. Clustering in WSN Using Node Ranking with Hybrid Nodes Duty-Cycle and Energy Threshold. In Proceedings of the 2014 IEEE 13th International Symposium on Network Computing and Applications (NCA), Cambridge, MA, USA, 21–23 August 2014; pp. 245–252.
- Alnuaimi, M.; Shuaib, K.; Alnuaimi, K.; Abed-Hafez, M. An efficient clustering algorithm for wireless sensor networks. Int. J. Pervasive Comput. Commun. 2015, 11, 302–322. [Google Scholar] [CrossRef]
- Introduction to the Travel Salesman Problem. Available online: http://www.oocities.org/ gopal_mba/tsp/modi.html (accessed on 6 March 2015).
- Abdoun, O.; Abouchabaka, J.; Tajani, C. Analyzing the Performance of Mutation Operators to Solve the Travelling Salesman Problem. IJES Int. J. Emerg. Sci. 2012, 2, 61–77. [Google Scholar]
- Xue, L.; Kim, D.; Zhu, Y.; Li, D.; Wang, W.; Tokuta, A.O. Multiple heterogeneous data ferry trajectory planning in wireless sensor networks. In Proceedings of the 2014 Proceedings IEEE INFOCUM, Toronto, ON, Canada, 27 April–2 May 2014; pp. 2274–2282.
- Shah, R.C.; Roy, S.; Jain, S.; Brunette, W. Data MULEs: Modeling a Three-Tier Architecture for Sparse Sensor Networks. In Proceedings of the First IEEE International Workshop Sensor Network Protocols and Applications, Anchorage, AK, USA, 11–15 May 2003; pp. 30–41.
- Jain, S.; Shah, R.C.; Brunette, W.; Borriello, G.; Roy, S. Exploiting Mobility for Energy Efficient Data Collection in Sensor Networks. Mob. Netw. Appl. 2006, 11, 327–339. [Google Scholar] [CrossRef]
- Song, L.; Hatzinakos, D. Architecture of Wireless Sensor Networks with Mobile Sinks: Sparsely Deployed Sensors. IEEE Trans. Veh. Technol. 2007, 56, 1826–1836. [Google Scholar] [CrossRef]
- Luo, J.; Panchard, J.; Piorkowski, M.; Grossglauser, M.; Hubaux, J. MobiRoute: Routing towards a Mobile Sink for Improving Lifetime in Sensor Networks. In Distributed Computing in Sensor Systems; Springer Heidelberg: Berlin, Germany, 2006; pp. 480–497. [Google Scholar]
- Khan, F.; Khan, S.A.; Turgut, D.; Boloni, L. Greedy path planning for maximizing value of information in underwater sensor networks. In Proceeding of the the 39th Annual IEEE Conference on Local Computer Networks, Edmonton, AB, Canada, 8–11 September 2014.
- Luo, J.; Hubaux, J.P. Joint mobility and routing for lifetime elongation in wireless sensor networks. In Proceedings of the 24th Annual Joint Conference of the IEEE Computer Communications (INFOCOM 2005), Miami, FL, USA, 13–17 March 2005; pp. 1735–1746.
- Xing, G.; Wang, T.; Xie, Z.; Jia, W. Rendezvous design algorithms for wireless sensor networks with a mobile base station. In Proceedings of the the 9th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Hong Kong, China, 26–30 May 2008; pp. 231–240.
- Xing, G.; Wang, T.; Xie, Z.; Jia, W. Rendezvous planning in wireless sensor networks with mobile elements. IEEE Trans. Mob. Comput. 2008, 7, 1–14. [Google Scholar]
- Salarian, H.; Chin, K.; Naghdy, F. An energy efficient mobile sink path selection strategy for wireless sensor networks. IEEE Trans. Veh. Technol. 2014, 63, 2407–2419. [Google Scholar] [CrossRef]
- Konstantopoulos, C.; Pantziou, G.; Vathis, N.; Nakos, V.; Gavalas, D. Efficient mobile sink-based data gathering in wireless sensor networks with guaranteed delay. In Proceedings of the 12th ACM international symposium on mobility management and wireless access (MOBIWAC 2014), Montreal, QC, Canada, 21–26 September 2014; pp. 47–54.
- Somasundara, A.; Ramamoorthy, A.; Srivastava, M. Mobile Element Scheduling for Efficient Data Collection in Wireless Sensor Networks with Dynamic Deadlines. In Proceedings of the 25th IEEE International Real-Time Systems Symposium, Lisbon, Portugal, 5–8 December 2004; pp. 296–305.
- Gu, Y.; Bozdag, D.; Brewer, R.; Ekici, E. Data Harvesting with Mobile Elements in Wireless Sensor Networks. Comput. Netw. 2006, 50, 3449–3465. [Google Scholar] [CrossRef]
- Chen, T.-C.; Chen, T.-S.; Wu, P.-W. Data collection in wireless sensor networks assisted by mobile collector. In Proceedings of the 1st IFIP Wireless Days, Dubai, United Arab Emirates, 24–27 November 2008; pp. 1–5.
- Liang, H.; Zhuang, Y.; Pan, J.; Xu, J. Evaluating on-demand data collection with mobile elements in wireless sensor networks. In Proceeding of the 2010 IEEE 72nd Vehicular Technology Conference Fall (VTC 2010-Fall), Ottawa, ON, Canada, 6–9 September 2010; pp. 1–5.
- Jawhar, I.; Ammar, M.; Zhang, S.; Wu, J.; Mohamed, N. Ferry-based linear wireless sensor networks. In Proceedings of the 2013 IEEE Global Communications Conference (GLOBECOM), Atlanta, GA, USA, 9–13 December 2013; pp. 304–309.
- Alnuaimi, M.; Shuaib, K.; Alnuaimi, K.; Abdel-Hafez, M. Performance analysis of clustering protocols in WSN. In Proceedings of IFIP/IEEE WMNC2013, Dubai, United Arab Emirates, 22–24 April 2013.
- Anastasi, G.; Conti, M.; di Francesco, M.; Passarella, A. Energy conservation in wireless sensor networks: A survey. Ad Hoc Netw. 2009, 7, 537–568. [Google Scholar] [CrossRef]
- Raghunathan, V.; Ganeriwal, S.; Srivastava, M. Emerging Techniques for Long Lived Wireless Sensor Networks. IEEE Commun. Mag. 2006, 44, 108–114. [Google Scholar] [CrossRef]
- Kumar, N.; Bhutani, P.; Mishra, P. U-LEACH: A novel routing protocol for heterogeneous Wireless Sensor Networks. In Proceedings of the 2012 International Conference on Communication, Information & Computing Technology (ICCICT), Mumbai, India, 19–20 October 2012; pp. 1–4.
- Blough, D.M.; Santi, P. Investigating upper bounds on network lifetime extension for cell-based energy conservation techniques in stationary ad hoc networks. In Proceedings of the 8th Annual International Conference on Mobile Computing and Networking, Atlanta, GA, USA, 22–26 September 2002; pp. 183–192.
- Nikolidakis, S.A.; Kandris, D.; Vergados, D.D.; Douligeris, C. Energy efficient routing in wireless sensor networks through balanced clustering. Algorithms 2013, 6, 29–42. [Google Scholar] [CrossRef]
- Younis, O.; Fahmy, S. HEED: A hybrid, energy-efficient, distributed clustering approach for ad hoc sensor networks. IEEE Trans. Mob. Comput. 2004, 3, 366–379. [Google Scholar] [CrossRef]
- Biradar, R.V.; Sawant, S.R.; Mudholkar, R.R.; Patil, V.C. Multihop routing in self-organizing wireless sensor networks. IJCSI Int. J. Comput. Sci. Issues 2011, 8, 155–164. [Google Scholar]
- Heinzelman, W.B.; Chandrakasan, A.P.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Hawaii International Conference on System Sciences, Maui, HI, USA, 4–7 January 2000.
- Lindsey, S.; Raghavendra, C.S. PEGASIS: Power-efficient gathering in sensor information systems. In Proceedings of the Aerospace Conference Proceedings, Big Sky, MT, USA, 9–16 March 2002.
- Woeginger, G.J. Exact algorithms for NP-hard problems: A survey. In Combinatorial Optimization—Eureka, You Shrink; Springer Heidelberg: Berlin, Germany, 2003; pp. 185–207. [Google Scholar]
- Alnuaimi, M.; Shuaib, K.; Alnuaimi, K.; Abdel-Hafez, M. Ferry-Based Data Gathering in Wireless Sensor Networks with Path Selection. Procedia Comput. Sci. 2015, 52, 286–293. [Google Scholar] [CrossRef]
- Gao, S.; Zhang, H.; Das, S.K. Efficient Data Collection in Wireless Sensor Networks with Path-Constrained Mobile Sinks. IEEE Trans. Mob. Comput. 2011, 10, 592–608. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alnuaimi, M.; Shuaib, K.; Alnuaimi, K.; Abdel-Hafez, M. Data Gathering in Delay Tolerant Wireless Sensor Networks Using a Ferry. Sensors 2015, 15, 25809-25830. https://doi.org/10.3390/s151025809
Alnuaimi M, Shuaib K, Alnuaimi K, Abdel-Hafez M. Data Gathering in Delay Tolerant Wireless Sensor Networks Using a Ferry. Sensors. 2015; 15(10):25809-25830. https://doi.org/10.3390/s151025809
Chicago/Turabian StyleAlnuaimi, Mariam, Khaled Shuaib, Klaithem Alnuaimi, and Mohammed Abdel-Hafez. 2015. "Data Gathering in Delay Tolerant Wireless Sensor Networks Using a Ferry" Sensors 15, no. 10: 25809-25830. https://doi.org/10.3390/s151025809
APA StyleAlnuaimi, M., Shuaib, K., Alnuaimi, K., & Abdel-Hafez, M. (2015). Data Gathering in Delay Tolerant Wireless Sensor Networks Using a Ferry. Sensors, 15(10), 25809-25830. https://doi.org/10.3390/s151025809