
Calibration of Kinect for Xbox One and Comparison between the Two Generations of Microsoft Sensors



Abstract
:1. Introduction
2. The Two Generation of Kinect Sensors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kinect 1.0 | Kinect 2.0 | |
|---|---|---|
| RGB camera (pixel) | 1280 × 1024 or 640 × 480 | 1920 × 1080 |
| Depth camera (pixel) | 640 × 480 | 512 × 424 |
| Max depth distance (m) | 4.0 | 4.5 |
| Min depth distance (m) | 0.8 | 0.5 |
| Horizontal FOV (degrees) | 57 | 70 |
| Vertical FOV (degrees) | 43 | 60 |
| Tilt motor | Yes | No |
| Skeleton joint define | 20 | 26 |
| Full skeleton tracking | 2 | 6 |
| USB | 2.0 | 3.0 |
| Price (€) | 80 | 199 |
3. Geometric Calibration of the Optical Sensors
3.1. RGB and IR Camera Calibration
| Camera Name | ||||
|---|---|---|---|---|
| Kinect 1.0 RGB Camera | Kinect 1.0 IR Camera | |||
| Imaging Sensor | ||||
| Type | Aptina MT9M112 CMOS | Aptina MT9M001 CMOS | ||
| Resolution (pixels) | 1280 × 1024 or 640 × 480 | 640 × 480 | ||
| Pixel size (µm) | 2.8 | 5.2 | ||
| Interior Parameters | ||||
| Value | St. Dev | Value | St. Dev | |
| Focal length (mm) | 3.099 | 2.0e−3 | 6.497 | 3.0e−3 |
| Format width (mm) | 3.58 | 6.66 | ||
| Format height (mm) | 2.87 | 5.32 | ||
| Image width (pixels) | 640 | 640 | ||
| Image height (pixels) | 480 | 480 | ||
| Principal Point x (mm) | −0.040 | 9.2e−4 | −0.005 | 2.0e−3 |
| Principal Point y (mm) | −0.020 | 1.0e−3 | −0.004 | 3.0e−3 |
| Additional Parameters | ||||
| K1 (mm−2) | −1.366e−3 | 9.1e−5 | 1.795e−3 | 4.3e−5 |
| K2 (mm−4) | 7.857e−4 | 1.7e−5 | −8.337e−5 | 2.5e−6 |
| P1 (mm−2) | −1.518e−4 | 2.9e−5 | −1.835e−4 | 2.1e−5 |
| P2 (mm−2) | −9.514e−4 | 3.2e−5 | 2.538e−4 | 2.2e−5 |
| Camera Name | ||||
|---|---|---|---|---|
| Kinect 2.0 RGB Camera | Kinect 2.0 IR Camera | |||
| Imaging Sensor | ||||
| Type | - | - | ||
| Resolution (pixels) | 1920 × 1080 | 512 × 424 | ||
| Pixel size (µm) | 3.1 | 10 | ||
| Interior Parameters | ||||
| Value | St. Dev | Value | St. Dev | |
| Focal length (mm) | 3.291 | 1.0e−3 | 3.657 | 5.2e−4 |
| Format width (mm) | 6.00 | 5.12 | ||
| Format height (mm) | 3.38 | 4.24 | ||
| Image width (pixels) | 1920 | 512 | ||
| Image height (pixels) | 1080 | 424 | ||
| Principal Point x (mm) | −0.005 | 5.6e−4 | 0.032 | 3.5e−4 |
| Principal Point y (mm) | −0.016 | 6.9e−04 | 0.033 | 3.9e−4 |
| Additional Parameters | ||||
| K1 (mm−2) | 3.823e−3 | 3.8e−5 | −6.510e−3 | 2.7e−5 |
| K2 (mm−4) | 3.149−4 | 3.8e−6 | 1.205e−3 | 3.8e−6 |
| P1 (mm−2) | 2.332e−4 | 2.0e−5 | 1.377e−4 | 8.0e−6 |
| P2 (mm−2) | −5.152e−4 | 2.1e−6 | 1.589e−4 | 9.2e−6 |
3.2. Image Sensors Precision




3.3. Depth Image Distortion Correction
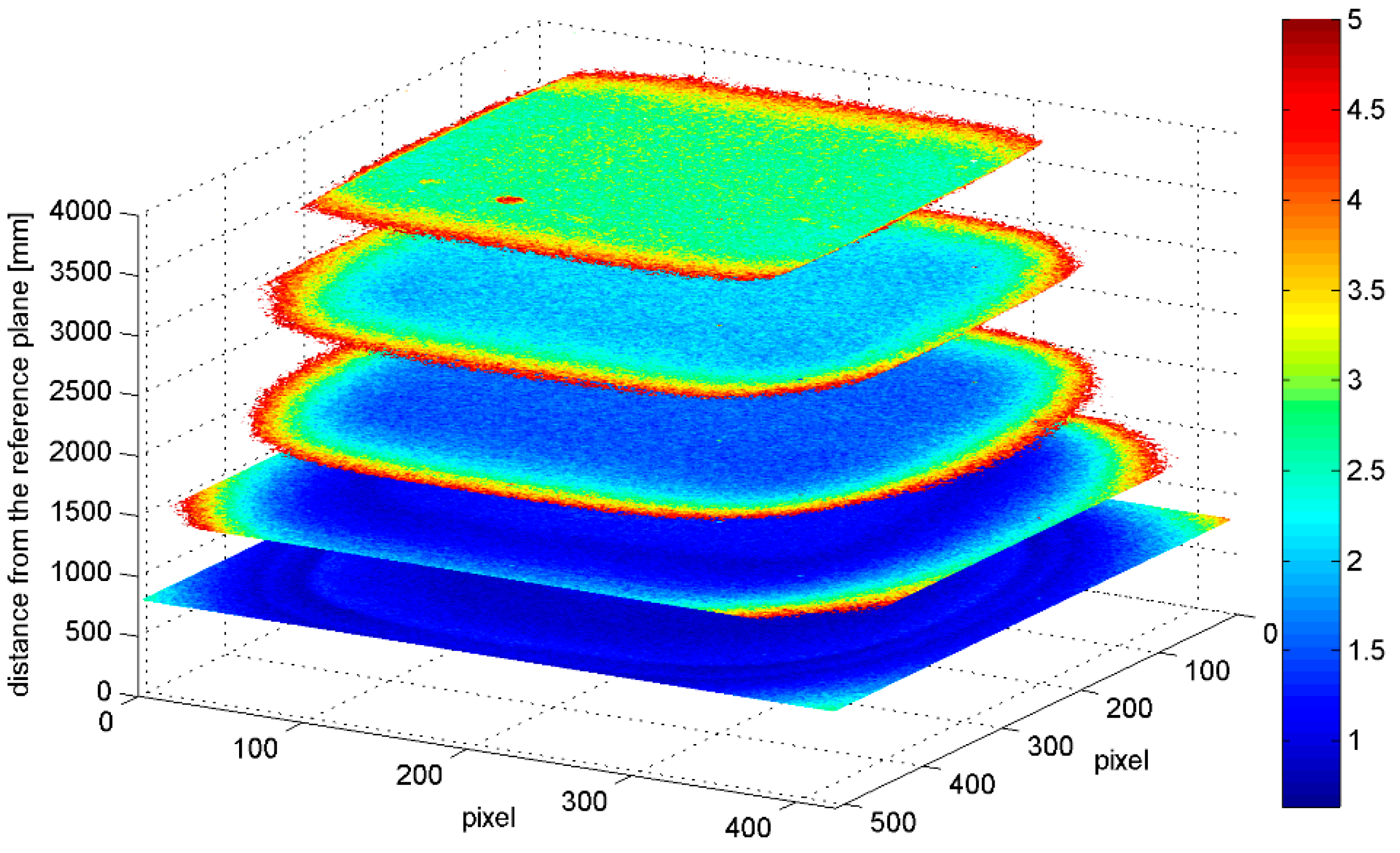
3.4. Depth Measurement Accuracy
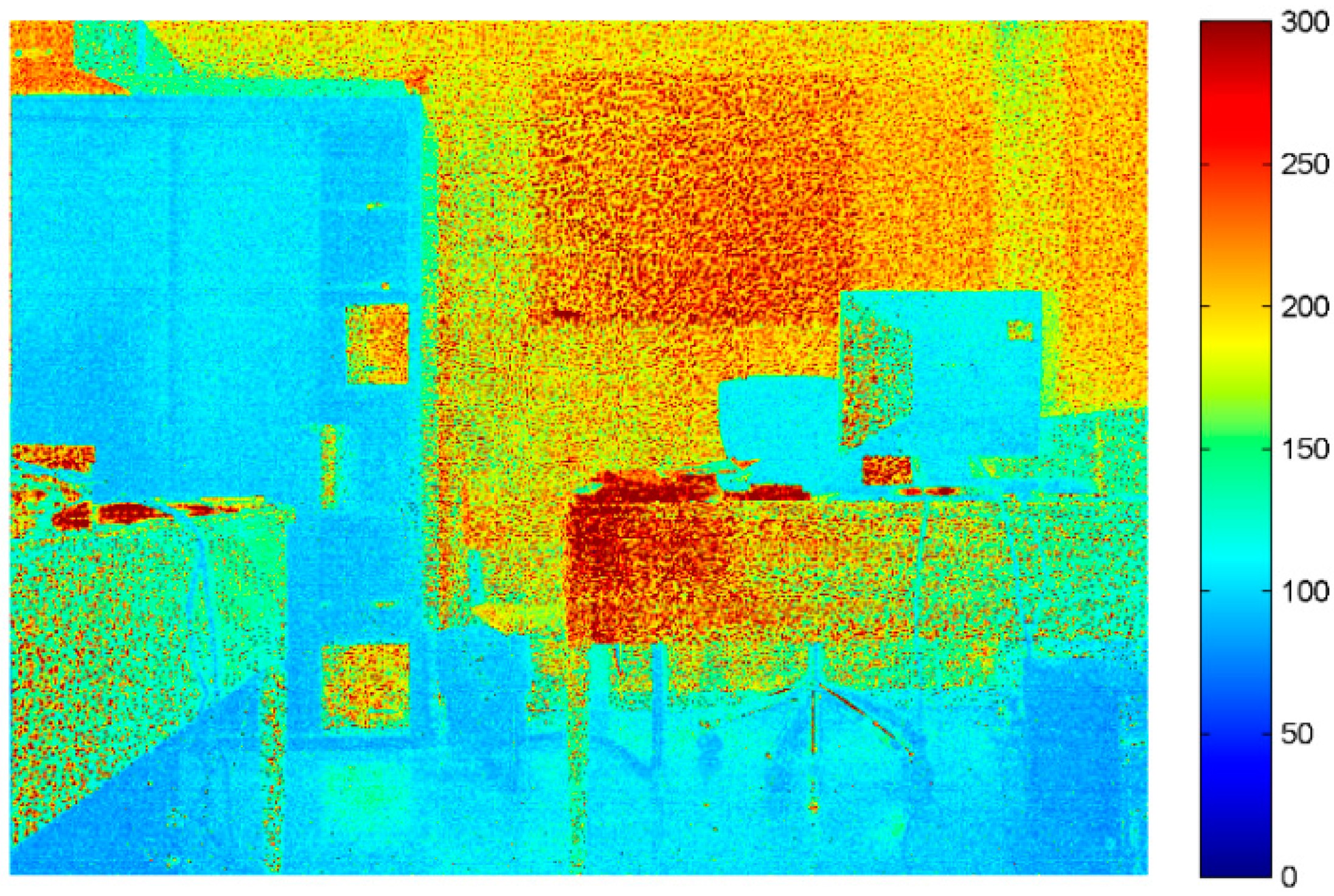
3.5. Depth Measurement Precision



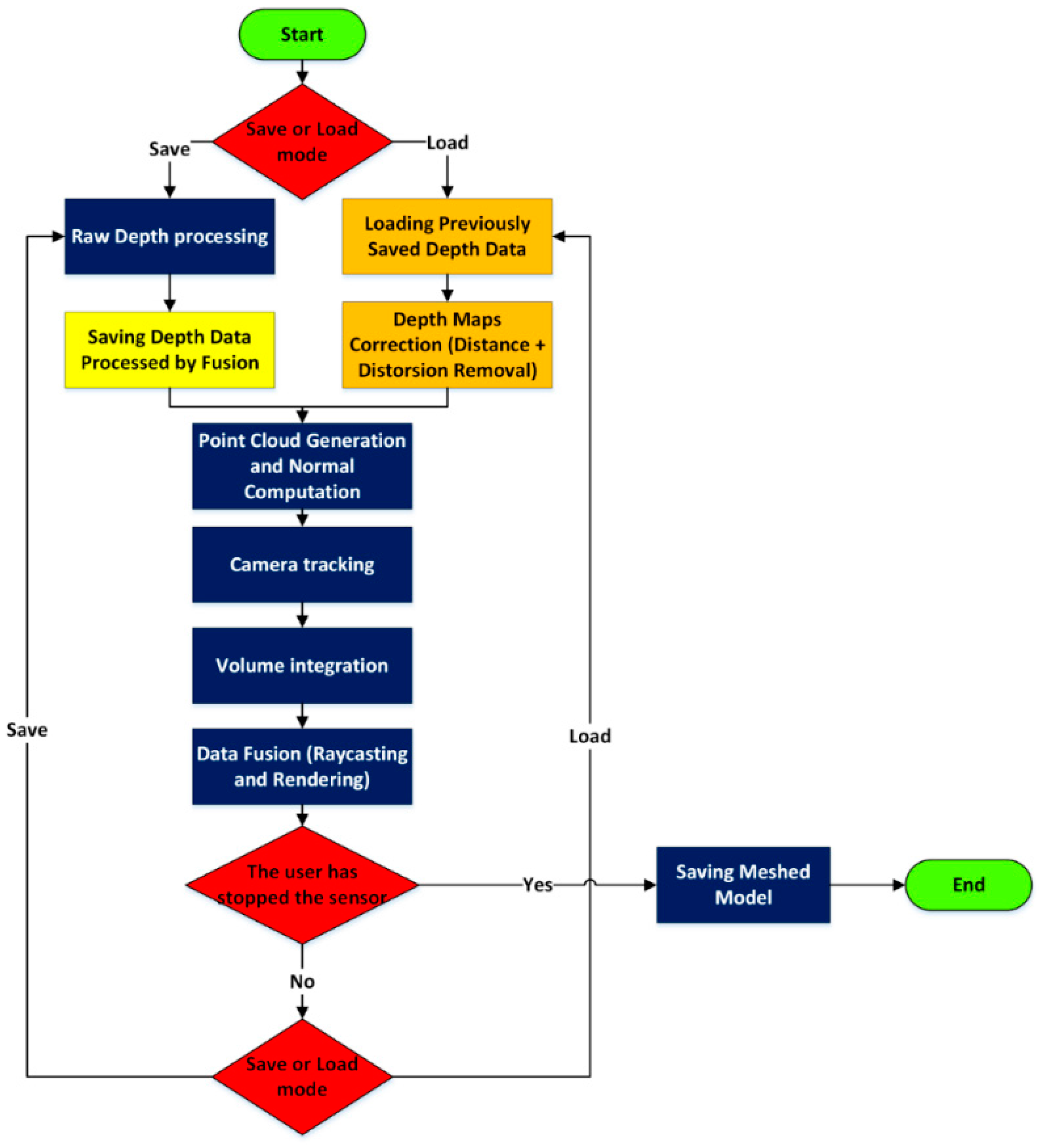
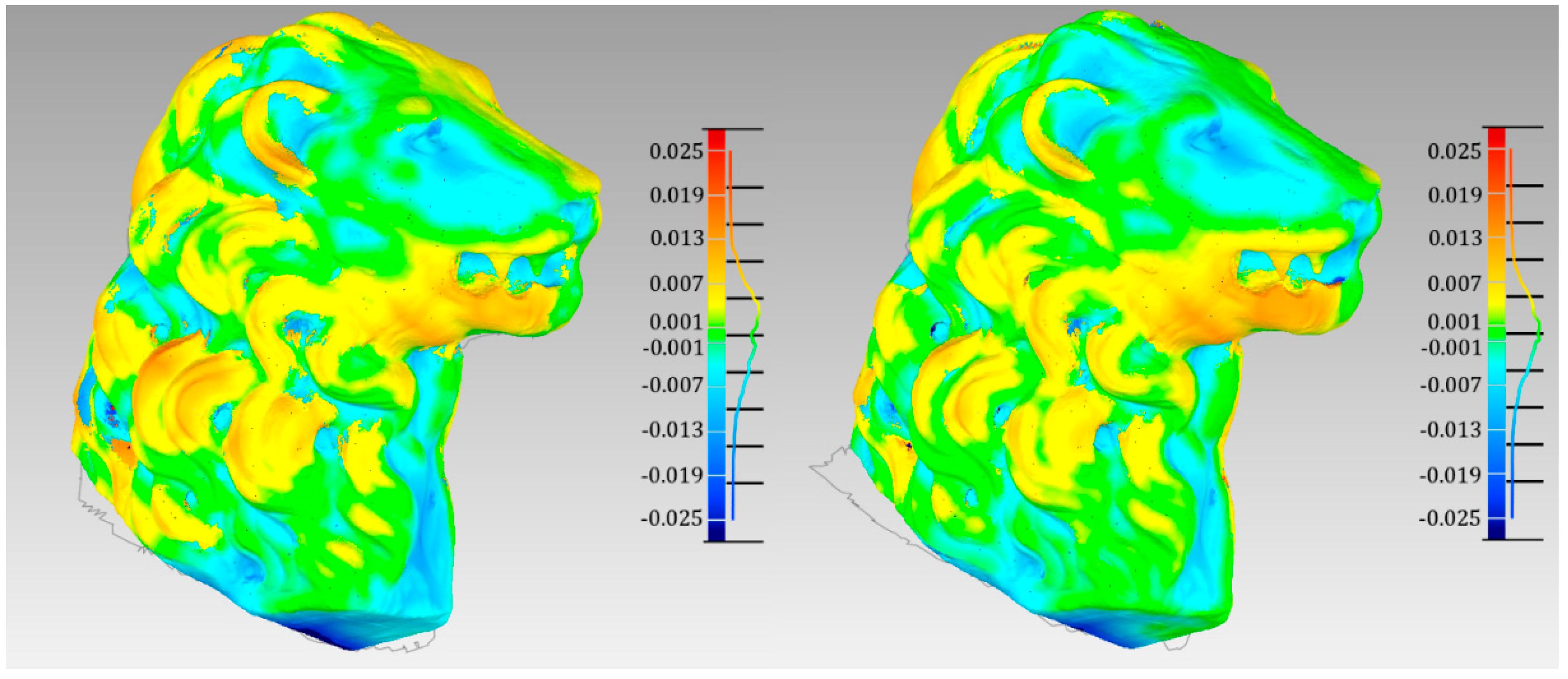
4. Test with Fusion Libraries


5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- El-Iaithy, R.A.; Jidong, H.; Yeh, M. Study on the Use of Microsoft Kinect for Robotics Applications. In Proceedings of the Position Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012; pp. 1280–1288.
- Oliver, A.; Kong, S.; Wünsche, B.; MacDonald, B. Using the Kinect as a Navigation Sensor for Mobile Robotics. In Proceedings of the 27th Conference on Image and Vision Computing (IVCNZ’12), Dunedin, New Zealand, 26–28 November 2012; pp. 505–514.
- Samoil, S.; Lai, K.; Yanushkevich, S.N. Multispectral Hand Biometrics. In Proceedings of the 4th International Conference on Engineering Security Technologies, Kopaonik, Serbia, 9–13 March 2104. [CrossRef]
- Suarez, J.; Murphy, R.R. Using the Kinect for Search and Rescue Robotics. In Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), College Station, TX, USA, 5–8 November 2012; pp. 1–2.
- Macknojia, R.; Chavez-Aragon, A.; Payeur, P.; Laganiere, R. Calibration of a Network of Kinect Sensors for Robotic Inspection over a Large Workspace. In Proceedings of the 2013 IEEE Workshop on Robot Vision (WORV), Clearwater, FL, USA, 15–17 January 2013; pp. 184–190.
- Alnowami, M.; Alnwaimi, B.; Tahavori, F.; Copland, F.; Wells, K. A Quantitative Assessment of Using the Kinect for Xbox360 for Respiratory Surface Motion Tracking. In Proceedings of the Medical Imaging 2012: Image-Guided Procedures, Robotic Interventions, and Modeling, San Diego, CA, USA, 4 February 2012. [CrossRef]
- Guevara, D.C.; Vietri, G.; Prabakar, M.; Jong-Hoon, K. Robotic Exoskeleton System Controlled by Kinect and Haptic Sensors for Physical Therapy. In Proceedings of the 29th Southern Biomedical Engineering Conference (SBEC), Miami, FL, USA, 3–5 May 2013; pp. 71–72.
- Bernacchia, N.; Scalise, L.; Casacanditella, L.; Ercoli, I.; Marchionni, P.; Tomasini, E.P. Non Contact Measurement of Heart and Respiration Rates Based on Kinect™. In Proceedings of the 2014 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Lisbon, Poutugal, 11–12 June 2014; pp. 1–5.
- Kastaniotis, D.; Economou, G.; Fotopoulos, S.; Kartsakalis, G.; Papathanasopoulos, P. Using Kinect for Assessing the State of Multiple Sclerosis Patients. In Proceedings of the 2014 EAI 4th International Conference on Wireless Mobile Communication and Healthcare (Mobihealth), Athens, Greece, 3–5 November 2014; pp. 164–167.
- Schindhelm, C.K. Evaluating SLAM approach for Microsoft Kinect. In Proceedings of the 8th International Conference on Wireless and Mobile Communications, Venice, Italy, 24–29 June 2012; pp. 402–407.
- Han, J.; Shoo, L.; Xu, D.; Shotton, J. Enhanced Computer Vision with Microsoft Kinect Sensor: A Review. IEEE Trans. Cybern. 2013, 43, 1318–1334. [Google Scholar] [PubMed]
- Engelhard, N.; Endres, F.; Hess, J.; Sturm, J.; Burgard, W. Real-Time 3D Visual SLAM with a Hand-Held RGB-D Camera. In Proceedings of the RGB-D Workshop on 3D Perception in Robotics at the European Robotics Forum, Vasteras, Sweden, 8 April 2011; pp. 1–2.
- Lee, D.; Kim, H.; Myung, H. GPU-Based Real-Time RGB-D 3D SLAM. In Proceedings of the 9th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Daejeon, Korea, 26–28 November 2012; pp. 46–48.
- Khoshelham, K. Accuracy Analysis of Kinect Depth Data. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Science, Calgary, Alberta, CA, 29–31 August 2011; pp. 133–138.
- Menna, F.; Remondino, F.; Battisti, R.; Nocerino, E. Geometric Investigation of a Gaming Active Device. In Proceedings of the SPIE8085 Videometrics Range Imaging and Applications XI, Munich, Germany, 23 May 2011. [CrossRef]
- Mankhoff, K.D.; Russo, T.A. The Kinect: A Low Cost, High Resolution, Short-Range, 3D Camera. Earth Surf. Proc. Land 2012, 38, 926–936. [Google Scholar] [CrossRef]
- Chow, J.C.; Lichti, D.D. Photogrammetric Bundle Adjustment with Self-Calibration of the PrimeSense 3D Camera Technology: Microsoft Kinect. IEEE Access 2013, 1, 465–474. [Google Scholar] [CrossRef]
- Shpunt, A.; Zalvesky, Z. Depth-Varying Light Fields for Three Dimensional Sensing. US. Patent 8,050,461, 8 May 2008. [Google Scholar]
- Izadi, S.; Kim, D.; Hilliges, O.; Molyneaux, D.; Newcombe, R.; Kohli, P.; Shotton, J.; Hodges, S.; Freeman, D.; Davison, A.; et al. KinectFusion: Real-Time 3D Reconstrucion and Interaction Using a Moving Depth Camera. In Proceedings of the ACM Symposium on User Interface Software and Technology, Santa Barbara, CA, USA, 16–19 October 2011; pp. 559–568.
- Chow, J.C.K.; Ang, K.D.; Lichti, D.D.; Teskey, W.F. Performance Analysis of a Low-Cost Triangulation-Based 3d Camera: Microsoft Kinect System. In Proceedings of the International Society for Photogrammetry and Remote Sensing Congress, Melbourne, Australia, 25 August–1 September 2012; pp. 175–180.
- Park, J.H.; Shin, Y.D.; Bae, J.H.; Baeg, M.H. Spatial Uncertainty Model for Visual Features Using a KinectTM Sensor. Sensors 2012, 12, 8640–8662. [Google Scholar] [CrossRef] [PubMed]
- Herrera, C.D.; Kannala, J.; Heikkilä, J. Joint Depth and Color Camera Calibration with Distortion Correction. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2058–2064. [Google Scholar] [CrossRef] [PubMed]
- Smisek, J.; Jancosek, M.; Pajdla, T. 3D with Kinect; Springer: London, UK, 2013; pp. 3–25. [Google Scholar]
- Lachat, E.; Macher, H.; Mittet, M.A.; Landes, T.; Grussenmeyer, P. First Experiences with Kinect V2 Sensor for Close Range 3d Modelling. In Proceedings of the Conference on 3D Virtual Reconstruction and Visualization of Complex Architectures, Avila, Spain, 25–27 February 2015; pp. 93–100.
- Fankhauser, P.; Bloesch, M.; Rodriguez, D.; Kaestner, R.; Hutter, M.; Siegwart, R. Kinect V2 for Mobile Robot Navigation: Evaluation and Modeling. In Proceedings of the IEEE International Conference on Advanced Robotics (ICAR), 2015. (submitted).
- Pagès, J.; Salvi, J. Coded Light Techniques for 3D Reconstruction. Tous Les Numéros 2005, 4. [Google Scholar] [CrossRef]
- Sell, J.; O’Connor, P. The XboxOne System in a Chip and Kinect Sensor. IEEE Micro 2014, 34, 44–53. [Google Scholar] [CrossRef]
- Zennaro, S. Evaluation of Microsoft Kinect 360 and Microsoft Kinect One for Robotics and Computer Vision Applications. Master’s Thesis, Università degli Studi di Padova, Padova, Italy, 9 December 2014. [Google Scholar]
- Butkiewics, T. Low-cost Costal Mapping Using Kinect V2 Time-of-Flight Cameras. In Proceedings of the Oceans-St. John’s 2014, St. Jone’s, Newfoundland and Labrador, CA, 14–19 September 2014; pp. 1–9.
- Photomodeler. Available online: http://www.photomodeler.com/index.html (accessed on 15 July 2015).
- Bamji, C.S.; O’Connor, P.; Elkhatib, T.; Mehta, S.; Thompson, B.; Prather, L.A.; Snow, D.; Akkaya, O.C.; Daniel, A.; Payne, A.D.; et al. Vei-Han Chan. A 0.13 μm CMOS System-on-Chip for a 512 × 424 Time-of-Flight Image Sensor with Multi-Frequency Photo-Demodulation up to 130 MHz and 2 GS/s ADC. IEEE J. Solid State Circuits 2015, 50, 303–319. [Google Scholar] [CrossRef]
- Fiedler, D.; Müller, H. Impact of Thermal and Environmental Conditions on the Kinect Sensor; Springer Berlin Heidelberg: Berlin, Germany, 2013; pp. 21–31. [Google Scholar]
- Brown, D. Close-Range Camera Calibration. Photo Eng. 1987, 37, 855–866. [Google Scholar]
- Pagliari, D.; Menna, F.; Roncella, R.; Remondino, F.; Pinto, L. Kinect Fusion Improvement Using Depth Camera Calibration. In Proceedings of the Technical Commission V Symposium Remote Sensing Spatial and Information Science, XL-5, ISPRS, Riva del Garda, Italy, 23–25 June 2014; pp. 479–485.
- Krauss, K. Photogrammetry, Vol. 1: Foundamentals and Standard Processes; Dümmler: Bonn, Germany, 1993; pp. 1–466. [Google Scholar]
- Barzaghi, R.; Pinto, L. Elementi Di Topografia e Trattamento Delle Osservazioni; Città Studi Edizioni: Milano, Italy, 2014; pp. 1–416. [Google Scholar]
- Newcombe, R.A.; Izadi, S.; Hilliges, O.; Molyneaux, D.; Kim, D.; Davison, A.J.; Kohli, P.; Shotton, J.; Hodges, S.; Fitzgibbon, A. KinectFusion: Real-Time Dense Surface Mapping and Tracking. In Proceedings of the IEEE International Symposium on Mixed and Augmented Reality (ISMAR) 2011, Basel, Switzerland, 26–29 October 2011; pp. 127–136.
- Chen, Y.; Medioni, G. Object Modelling by Registration of Multiple Range Images. In Proceedings of the IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991; pp. 2724–2729.
- Besl, J.P.; Mckay, H.D. A Method for Registration of 3-D Shape. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Agisoft. Available online: http://www.agisoft.com (accessed on 15 June2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pagliari, D.; Pinto, L. Calibration of Kinect for Xbox One and Comparison between the Two Generations of Microsoft Sensors. Sensors 2015, 15, 27569-27589. https://doi.org/10.3390/s151127569
Pagliari D, Pinto L. Calibration of Kinect for Xbox One and Comparison between the Two Generations of Microsoft Sensors. Sensors. 2015; 15(11):27569-27589. https://doi.org/10.3390/s151127569
Chicago/Turabian StylePagliari, Diana, and Livio Pinto. 2015. "Calibration of Kinect for Xbox One and Comparison between the Two Generations of Microsoft Sensors" Sensors 15, no. 11: 27569-27589. https://doi.org/10.3390/s151127569
APA StylePagliari, D., & Pinto, L. (2015). Calibration of Kinect for Xbox One and Comparison between the Two Generations of Microsoft Sensors. Sensors, 15(11), 27569-27589. https://doi.org/10.3390/s151127569