
A Novel Robust H∞ Filter Based on Krein Space Theory in the SINS/CNS Attitude Reference System

Abstract
:1. Introduction
2. Linear Filter Based on the Krein Space Theory
2.1. Fundamentals of the Krein Space Theory
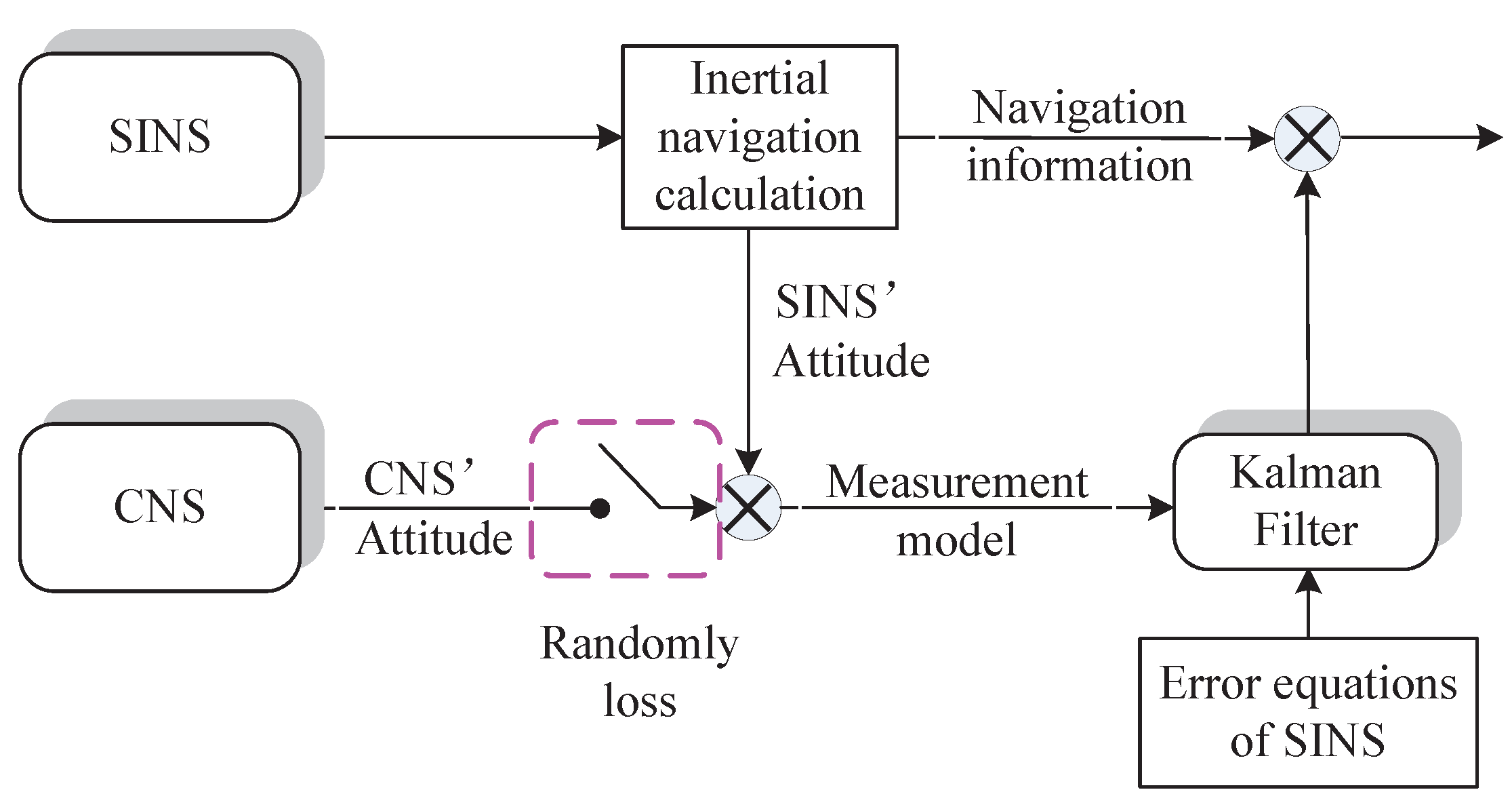
2.2. SINS/CNS Integrated System Model
3. Robust Filter Based on Krein Space Theory
4. Simulations and Experiments
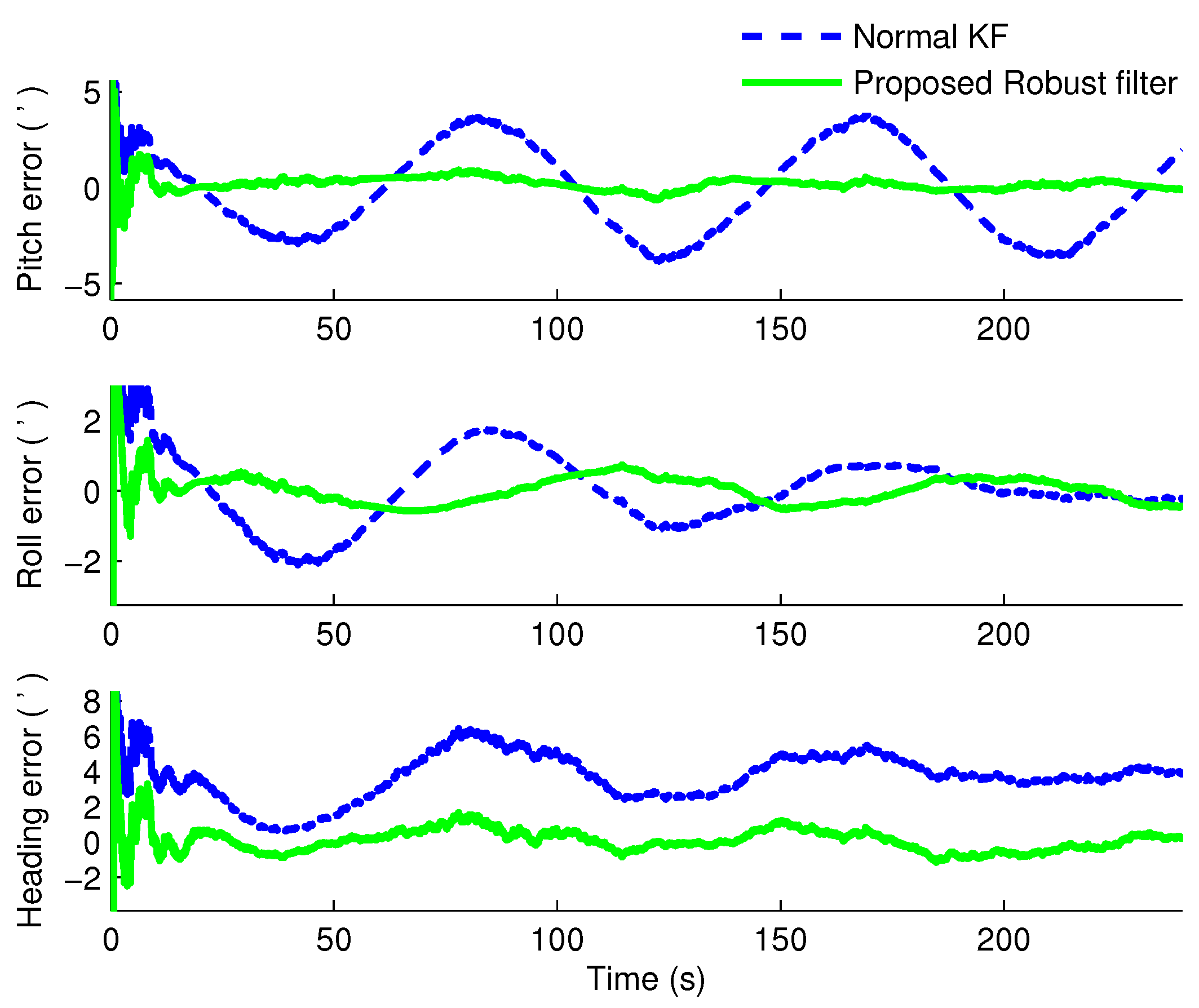
4.1. Simulations and Analysis
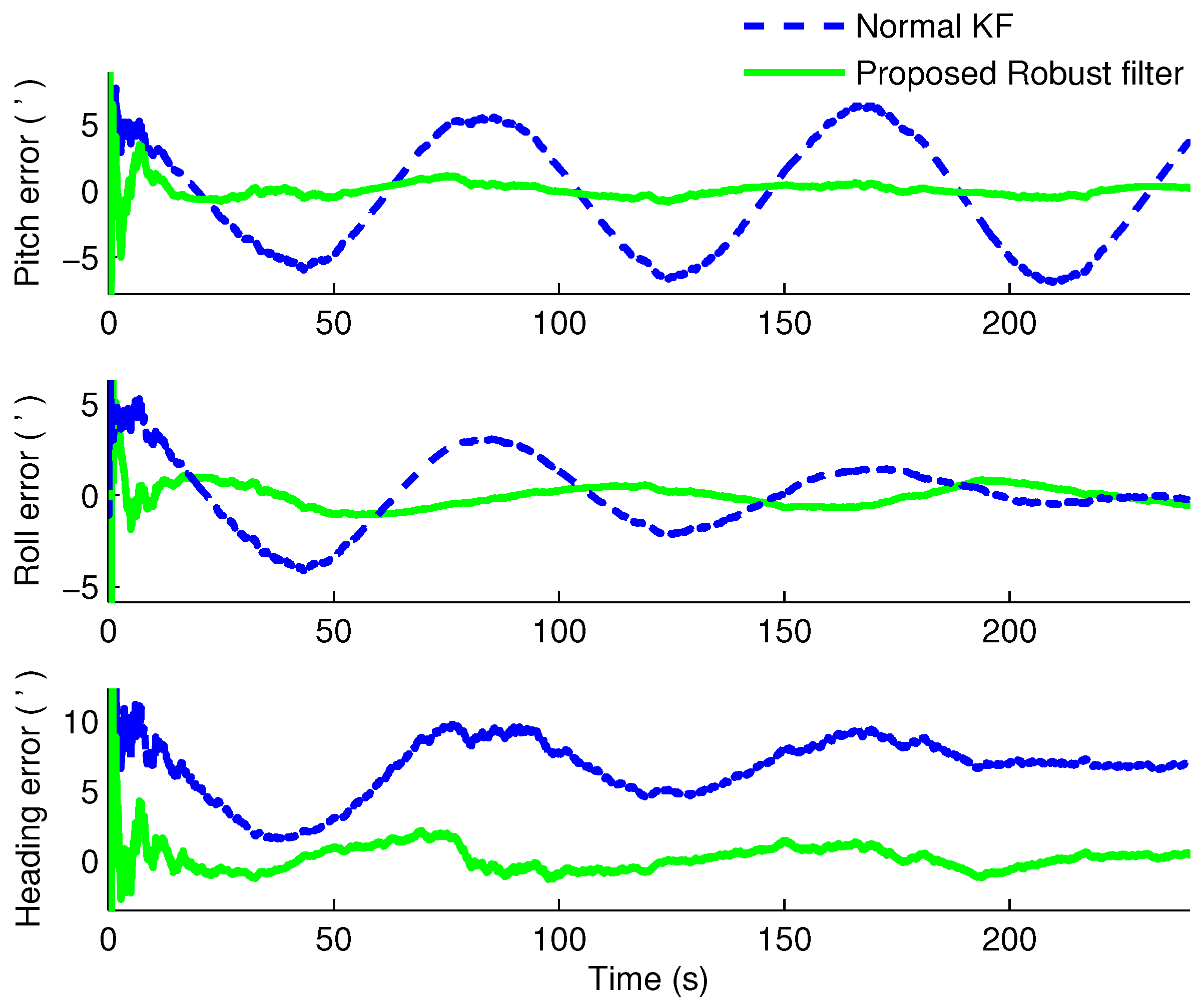
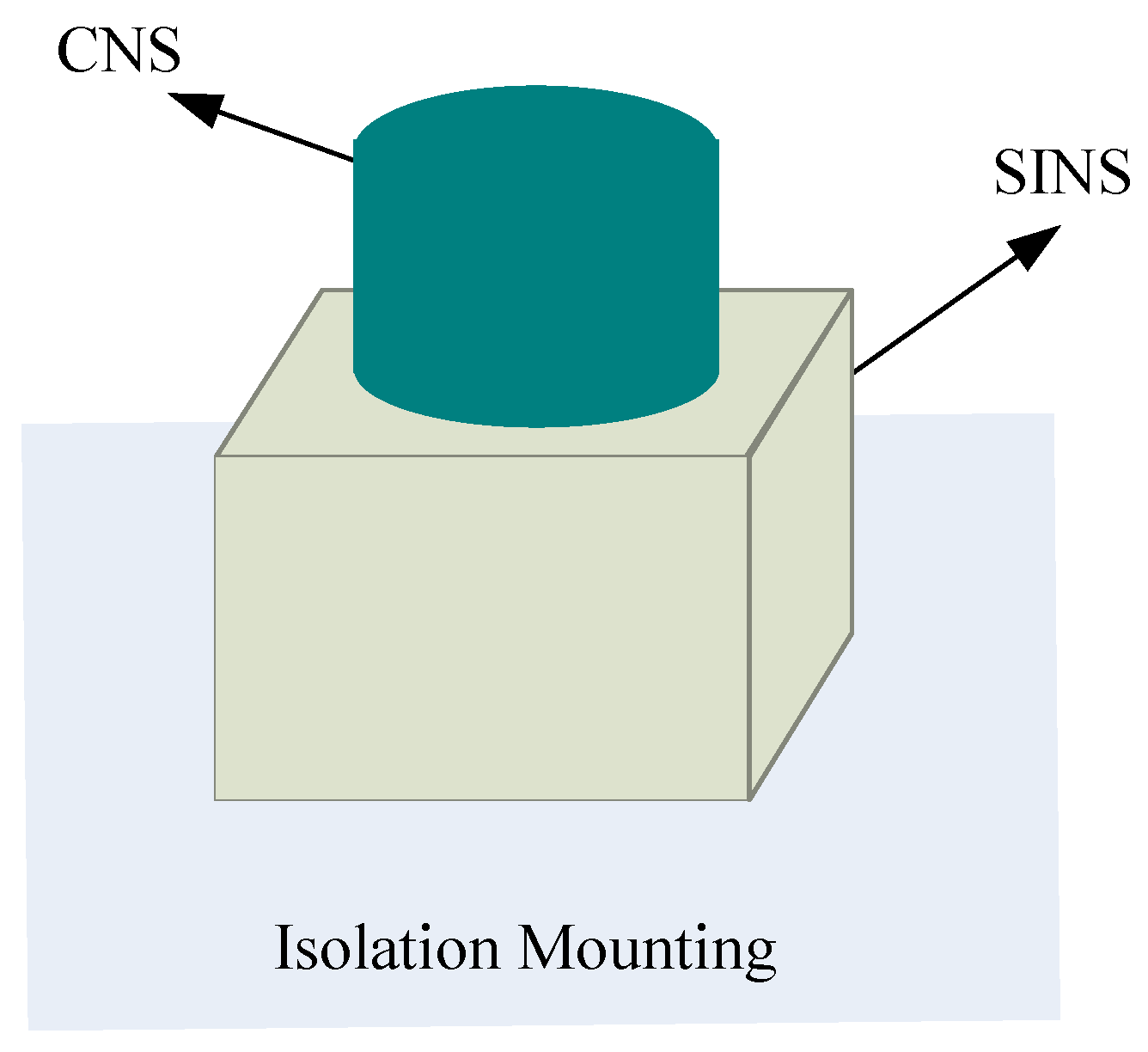
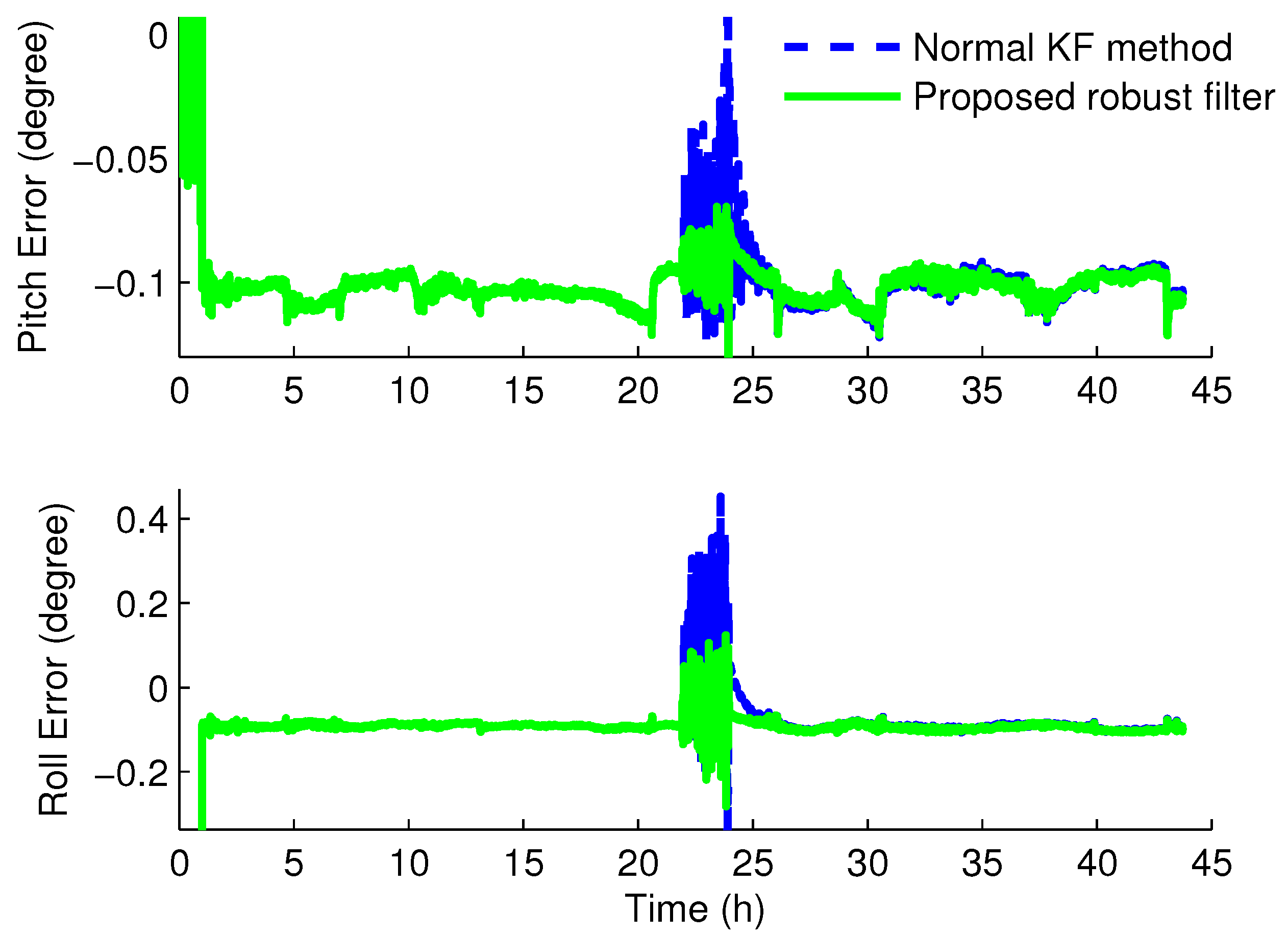
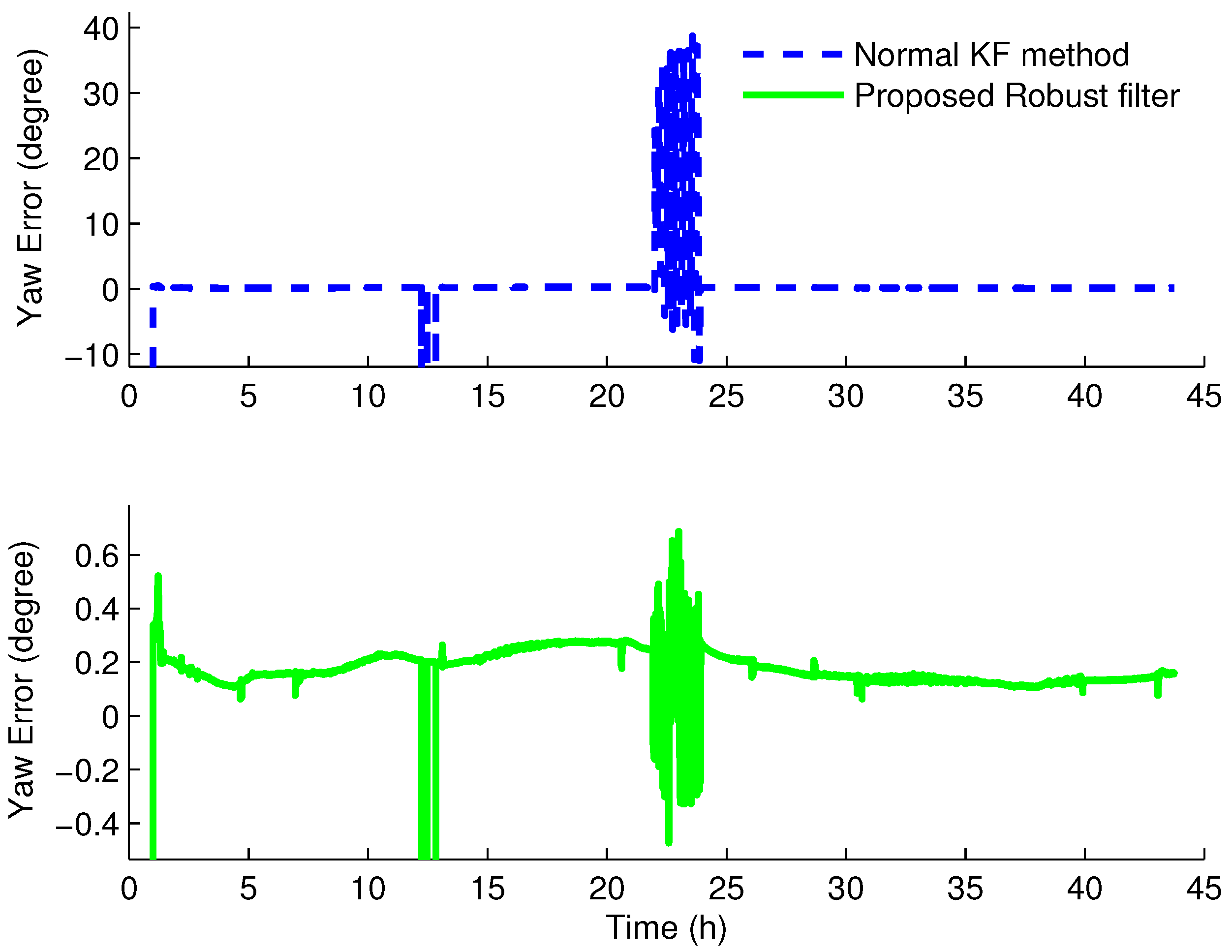
4.2. Experiments and Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sun, J.; Xu, X.S.; Liu, Y.T.; Zhang, T.; Li, Y. Initial Alignment of Large Azimuth Misalignment Angles in SINS Based on Adaptive UPF. Sensors 2015, 15, 21807–21823. [Google Scholar] [CrossRef] [PubMed]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV navigation and localization: A review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Gao, W.; Zhang, Y.; Wang, J. A strapdown interial navigation system/beidou/doppler velocity log integrated navigation algorithm based on a cubature Kalman filter. Sensors 2014, 14, 1511–1527. [Google Scholar] [CrossRef] [PubMed]
- Vasconcelos, J.; Silvestre, C.; Oliveira, P. INS/GPS aided by frequency contents of vector observations with application to autonomous surface crafts. IEEE J. Ocean. Eng. 2011, 36, 347–363. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, S.; Atia, M.M.; Noureldin, A. INS/GPS/LiDAR Integrated Navigation System for Urban and Indoor Environments Using Hybrid Scan Matching Algorithm. Sensors 2015, 15, 23286–23302. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Li, Y.; Diao, M.; Gao, W.; Yu, F. Coarse alignment of a shipborne strapdown inertial navigation system using star sensor. IET Sci. Meas. Technol. 2015, 9, 852–860. [Google Scholar] [CrossRef]
- Jaradat, M.A.K.; Abdel-Hafez, M.F. Enhanced, delay dependent, intelligent fusion for INS/GPS navigation system. IEEE Sens. J. 2014, 14, 1545–1554. [Google Scholar] [CrossRef]
- Ning, X.; Wang, L.; Wu, W.; Fang, J. A celestial assisted INS initialization method for lunar explorers. Sensors 2011, 11, 6991–7003. [Google Scholar] [CrossRef] [PubMed]
- Xu, F.; Fang, J. Velocity and position error compensation using strapdown inertial navigation system/celestial navigation system integration based on ensemble neural network. Aerosp. Sci. Technol. 2008, 12, 302–307. [Google Scholar] [CrossRef]
- Gao, S.; Zhong, Y.; Zhang, X.; Shirinzadeh, B. Multi-sensor optimal data fusion for INS/GPS/SAR integrated navigation system. Aerosp. Sci. Technol. 2009, 13, 232–237. [Google Scholar] [CrossRef]
- Nobahari, H.; Asl, H.G.; Abtahi, S.F. A back-propagation approach to compensate velocity and position errors in an integrated inertial/celestial navigation system using unscented Kalman filter. Proc. Inst. Mech. Eng. Part G: J. Aerosp. Eng. 2014, 228, 1702–1712. [Google Scholar] [CrossRef]
- Rad, A.M.; Nobari, J.H.; Nikkhah, A.A. Optimal attitude and position determination by integration of INS, star tracker, and horizon sensor. IEEE Aeros. Electron. Syst. Mag. 2014, 29, 20–33. [Google Scholar] [CrossRef]
- Hamza, B.; Nebylov, A. Robust nonlinear filtering applied to integrated navigation system INS/GNSS under non Gaussian measurement noise effect. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012; pp. 202–207.
- Gandhi, M.; Mili, L. Robust Kalman filter based on a generalized maximum-likelihood-type estimator. IEEE Trans. Signal Process. 2010, 58, 2509–2520. [Google Scholar] [CrossRef]
- Chen, B.S.; Wu, C.F. H∞ robust filter design for a class of nonlinear stochastic poisson jump systems. In Proceedings of the 2015 IEEE International Conference on Automation Science and Engineering (CASE), Gothenburg, Sweden, 24–28 August 2015; pp. 1557–1561.
- Hsieh, C.S. Robust state estimation via the descriptor Kalman filtering method. In Proceedings of the IEEE 2013 9th Asian Control Conference (ASCC), Istanbul, Turkey, 23–26 June 2013; pp. 1–6.
- De Souza, C.E.; Palhares, R.M.; Peres, P.L.D. Robust H∞ filter design for uncertain linear systems with multiple time-varying state delays. IEEE Trans. Signal Process. 2001, 49, 569–576. [Google Scholar] [CrossRef]
- Lee, T.; Ra, W.S.; Yoon, T.; Park, J. Robust Kalman filtering via Krein space estimation. IEE Proc. Control Theory Appl. 2004, 151, 59–63. [Google Scholar] [CrossRef]
- Zhong, M.; Guo, D.; Guo, J. PMI-Based Nonlinear Estimation of Unknown Sensor Error for INS/GPS Integrated System. IEEE Sens. J. 2015, 15, 2785–2794. [Google Scholar] [CrossRef]
- Feng, J.; Yu, F.; Zhang, P.; Zou, M. On initial alignment of large azimuth misalignment for SINS on the static base in Krein space. In Proceedings of the IEEE 2012 10th World Congress on Intelligent Control and Automation (WCICA), Beijing, China, 6–8 July 2012; pp. 1964–1968.
- Song, X.; Yan, X. Finite-horizon H∞ fault estimation for linear time-delay systems. In Proceedings of the IEEE 2014 33rd Chinese Control Conference (CCC), Nanjing, China, 28–30 July 2014; pp. 3255–3258.
- Hassibi, B.; Kailath, T.; Sayed, A.H. Array algorithms for H∞ estimation. IEEE Trans. Autom. Control 2000, 45, 702–706. [Google Scholar] [CrossRef]
- Ra, W.; Jin, S.; Park, J. Set-valued estimation approach to recursive robust H∞ filtering. IEE Proc. Control Theory Appl 2004, 151, 773–782. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| initial latitude | |
| initial longitude | |
| initial velocity | |
| gravity acceleration | m/s |
| initial misalignment angles | |
| constant drifts of the gyroscopes | /h |
| random noise of the gyroscopes | /h |
| constant biases of the accelerometers | |
| random noise of the accelerometer | |
| sampling frequency | 98 Hz |
| Running Time (s) | ||
|---|---|---|
| Kalman Filter | Proposed Filter | |
| Sensors | Parameters | Values |
|---|---|---|
| Gyro | Dynamic range | /s |
| Bias stability | /h | |
| Random walk | ||
| Scale factor stability | ppm | |
| Accelerometer | Dynamic range | g |
| Bias stability | g | |
| Random walk | g | |
| Scale factor stability | ppm | |
| Star Sensor | Field of view | |
| Attitude accuracy | ||
| Data update frequency | 20 Hz |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, F.; Lv, C.; Dong, Q. A Novel Robust H∞ Filter Based on Krein Space Theory in the SINS/CNS Attitude Reference System. Sensors 2016, 16, 396. https://doi.org/10.3390/s16030396
Yu F, Lv C, Dong Q. A Novel Robust H∞ Filter Based on Krein Space Theory in the SINS/CNS Attitude Reference System. Sensors. 2016; 16(3):396. https://doi.org/10.3390/s16030396
Chicago/Turabian StyleYu, Fei, Chongyang Lv, and Qianhui Dong. 2016. "A Novel Robust H∞ Filter Based on Krein Space Theory in the SINS/CNS Attitude Reference System" Sensors 16, no. 3: 396. https://doi.org/10.3390/s16030396
APA StyleYu, F., Lv, C., & Dong, Q. (2016). A Novel Robust H∞ Filter Based on Krein Space Theory in the SINS/CNS Attitude Reference System. Sensors, 16(3), 396. https://doi.org/10.3390/s16030396