3.1. Equations for the Double-Layered Secondary
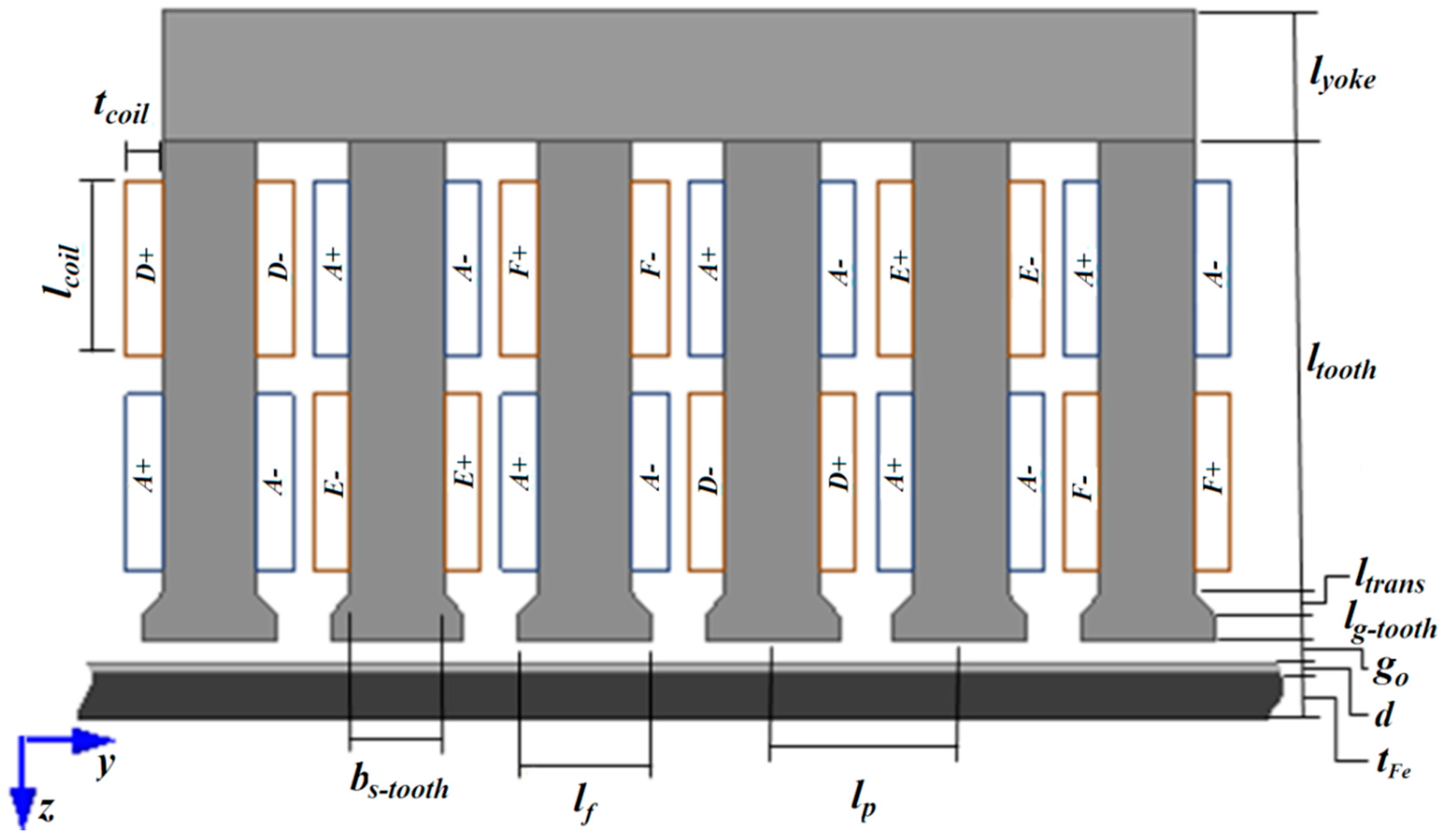
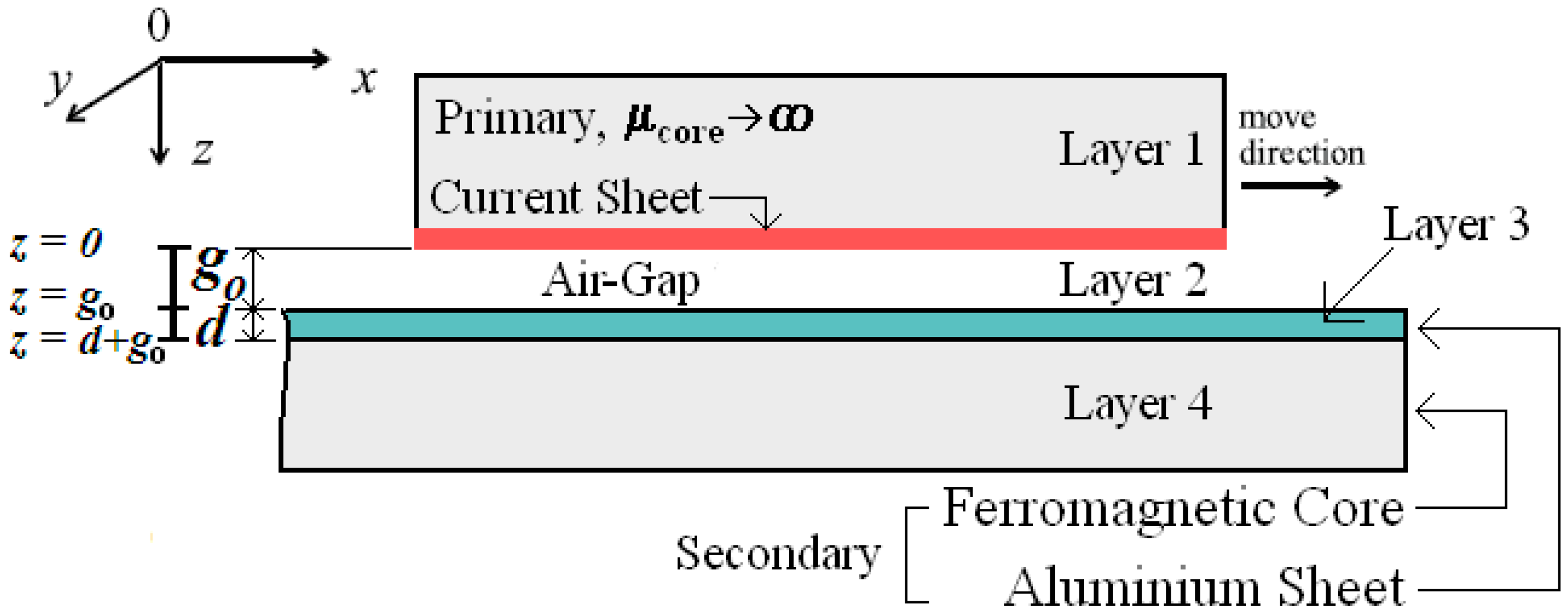
A longitudinal section of the analytical model of the induction planar actuator is shown in
Figure 3, considering that the secondary is formed by aluminium and ferromagnetic slabs. The slotted ferromagnetic core of the primary corresponds to layer 1. Each phase of the primary was represented by an infinitely thin sheet of current with a linear current density,
, in A/m.
The air-gap corresponds to the layer 2. According to what is described previously, the secondary consists of two layers, an aluminium slab, layer 3, and a steel ferromagnetic core, layer 4, having the latter a field-dependent permeability
. In this way, the actuator is modelled by four layers, and layer 1 is represented by
[
5].
The expression for
was developed based on the constructive characteristics of the core and the windings of the primary. Each phase of the
x-winding of the planar actuator under study is represented by a Fourier series, according to:
Using complex notation, after trigonometric transformation, the linear density current can be expressed by a sum of two travelling waves. The MMF produced by 3-phase currents in the primary can be described as a sum of two waves of MMF,
travels in the direction of the
x coordinate (forward-travelling magnetic field), and the other wave, given by
, travels in the opposite direction of the
x coordinate (backward-travelling magnetic field) [
10]. Making
p = 1 and
p = −1 [
5],
can be expressed in a short form as:
In Equation (1),
is the number of turns of each coil,
is the current peak value in each coil,
is the slot opening,
is the tooth tip width (by the air-gap),
is the shift of the slot centre in relation to the coordinate system,
is the phase displacement angle,
is the pole pitch,
n is the number of the space harmonic, with only the odd ones being relevant,
, and
is the frequency of currents in the primary winding. The coefficient
is a factor that corrects the shape of the distribution of the magnetic flux density through the x-axis. It is described in
Section 3.4. Equation (2) is represented in a short form by using
p in the exponential function that represents the time–spatial variation of
. When
p is equal to 1, the exponential function relates to the MMF wave that travels in the positive direction of the
x coordinate; when
p is equal to −1, the exponential function relates to a wave of MMF that travels in the opposite direction of x.
The Maxwell’s equations that govern the electromagnetic behaviour of the actuator under study are
,
and
[
5], where
is the magnetic field vector,
the current density vector in A/m
2,
the magnetic flux density vector,
, the electric field intensity vector and
is the time. Based on these equations and considering that in a moving medium,
, with
being equal to the conductivity of a layer and
as its magnetic permeability, it is possible to obtain the equation that describes the behaviour of the magnetic vector potential,
, inside layers 2, 3, and 4. Knowing that
is related to
by
, one can obtain [
5]:
and:
Applying Equations (3) and (4) according to the Ohm’s law for a moving medium, it results in:
where
is the relative speed of the primary with respect to the secondary, here assumed in the
x-direction, so
. In the
x-coils, the currents flow in the
y-direction only and that implies that
and
. Since the generation of the magnetic vector potential,
, is produced by the current in the coils of the primary,
can also be expressed by a sum of two waves of magnetic potential vector according to:
In Equation (6),
and
, where the superscript + refers to the forward-travelling field and - to the backward-travelling field, must be determined [
12]. The speed of the primary can be represented as a function of the slip
s as
, and
is the speed of the travelling magnetic field produced by the currents in the
x-winding. The product of
by
results in
. The corresponding slips to each harmonic component,
and
, are represented by
and
. Based on these considerations, when the solution of Equation (5) takes into account each wave separately, after some operations, it results in:
After some operations, the solution to Equation (7) is given by Equation (8) [
12]. The total potential is the sum of the solution for all values of
n:
In Equation (8), the subscript
i represents the layer number,
i.e., 2, 3 and 4 for the air-gap, aluminium and secondary iron core, respectively, and
,
,
and
must be obtained. For the secondary,
and
are expressed by [
12]:
The constants
and
are obtained through:
Boundary conditions related to the components of the magnetic field were imposed at the interfaces between layers. They relate the
x-components of the magnetic field and the
z-components of the magnetic flux density of two layers. They allow the solution of Equation (7) for each layer and lead to the electromagnetic field equations. The conditions are listed as:
- i.
in
- ii.
and in
- iii.
and in
- iv.
, when
where
g is the air-gap length corrected by multiplying
go by the Carter’s coefficient, according to what is described in
Section 3.4. The
x and
z-components of the magnetic flux density are equal to
and
, respectively. For each one of the waves in Equation (8), conditions from
i to
iv form a set of six equations and six unknowns. The solution of the equations set leads to obtaining of
,
,
,
,
and
. The
x and
z-components of the magnetic flux density vector and the
y-component of the electric field intensity vector produced by
x-winding inside the layers are given by the following set of equations:
The time–spatial variation of all electric and magnetic fields in the secondary is expressed by
for a forward-travelling magnetic field and by
for a backward-travelling magnetic field since the primary moves with speed
, so
is multiplied by the slip
because those equations are represented in the coordinate system related to the secondary. In Equations (11) to (19),
,
, 2, 3 and 4 are the layer number of air, aluminium and secondary iron core, respectively, and
d is the aluminium length through
z-axis,
p = −1, 1,
nf is the number of phases,
M is given by Equation (20) and
by Equation (21):
3.3. 3D Analytical Model
When both windings, x and y, are taken into account, an analytical 3D model was employed in order to analyse the behaviour of the forces produced by the actuator. The 3D model was deduced based on the 2D model presented is this paper. The dimensions of the magnetic circuit, the windings and phase currents are symmetrical. The current densities are presented in Equations (28) and (29). They describe the behaviour of the sheet of current produced by the x-winding,
, and by the y-winding,
. Both are expressed as a sum of four travelling waves:
where:
In Equations (28) and (29), and are the shift of the slot centre of the x and y-winding in relation to the x and y-coordinate, and are the phase displacement angle of the x and y-winding, n and m are the number of the space harmonics, is the tooth pitch. Similar to p, q is employed on the sum of the m harmonics and equals to 1 and -1. As p, it allows representing the exponential function that gives the time–spatial variation of and in a short form. The magnetic potential vector, , has x and y-components, and it is expressed by . The generation of and is made by and , respectively. So, each component of can be expressed as a sum of four travelling waves.
Following similar steps of the 2D analytical model, after some operations, the solution to the equations of the components of the magnetic potential vector and the boundary conditions relating to the components of the magnetic field allow obtaining the components of the magnetic flux density vector and of the electric field intensity vector in all layers. One of the results of the analysis is the components of the resulting magnetic flux density vector in the air gap for the double-layered secondary:
where
and
are given by:
The speed of the primary is equal to the vector sum of and , respectively the components of primary velocities when the x and y-windings are fed by current. When the x-winding is fed by current, the velocity of the primary is equal to . The corresponding slips for each harmonic component, and , are represented by and . Regarding to the y-winding, , where is the speed of the travelling magnetic field produced by the currents in the same winding and the slips to each harmonic component, and , are represented by and .
3.4. Corrections Factors Applied to the Electric and Magnetic Field Equations
In this work, the air-gap is corrected by multiplying its length,
go, by the Carter’s coefficient,
. This coefficient takes into account the stator slotting, and for a slotless secondary it is expressed by [
12] as:
where
is the magnetic air-gap for case 1 and
is given by:
The authors of [
13] present a modified equation for correcting the stator slotting when the secondary is slotless, according to:
The equivalent air-gap length in a 2D analytical model is expressed by:
In the 3D model, the equivalent air-gap length is equal to and and are calculated by using the dimensions of and throughout the x and y-axes.
The relative magnetic permeability of the ferromagnetic material of the secondary is corrected to account for the effects of hysteresis and saturation by means of a relative equivalent magnetic permeability,
, according to the expression [
12]:
where
is the relative magnetic permeability of the ferromagnetic material of the secondary. The real and imaginary permeabilities,
and
, respectively, are obtained according the following development based on [
12]. For the ferromagnetic plate, the constants are obtained by:
or:
and:
In Equations (44) and (45),
and
are coefficients that depend on the magnetic field on the surface of the ferromagnetic material. The author of [
14] describes a detailed investigation taking into account variations of
and
with the field intensity.
According to what was described previously,
is a factor that corrects the shape of the magnetic flux density through the
x-axis. The winding of the primary is formed in such a way that each coil is mounted around one tooth. The magnetic flux produced by one coil is distributed along of the tooth pitch. The
factor takes into account the behaviour the magnetic flux between two adjacent teeth and it is used to introduce the fringe effect in the equation of the linear current density,
. For a planar actuator with
>
,
is given by:
The application of this factor is proposed by the authors of this paper and it results from an empirical determination of the shape of the magnetic flux density in the air-gap.
The transverse edge effect acts in the direction of stator slotting and provokes a decrease of the secondary conductivity [
15]. In order to correct this effect, a coefficient is applied to the conductivity of the aluminium, according to:
where
is the actual conductivity of the aluminium. The coefficient
or Russel and Norsworthy factor,
, is calculated by [
9] as:
In Equation (48), and are the mover and the aluminium width through the y-axis, respectively, for the x-winding, and through x-axis for the y-winding.
In order to correct the transverse edge effect in the ferromagnetic back iron, the factor
is applied to the conductivity of the ferromagnetic material, according to
, where
is the actual conductivity of the ferromagnetic material. In [
10], four different equations are presented for the correction of the transverse effect for a linear induction motor with a steel reaction plate. Here, the authors make use of one of those equations presented in [
10], given by:
3.6. Electromagnetic Simulation
In order to validate the analytical model, the induction planar motor was fully modelled using Ansys Maxwell 16, a 3D field simulation package. Through the transient magnetic analysis capability of this package, the magnetic fields are computed at each time step set for the time domain of the simulation. The formulation of the solver is based on a current vector potential in solid conductors and a scalar potential over the entire field domain, and it allows the inclusion of nonlinear characteristics for the magnetic materials. To account for the effects of magnetic flux lines that pass through the air, the actuator was encircled in all directions by an air layer with the same size of the objects modelled, except for the simulation with only aluminium in the secondary, which required an air layer at least three times bigger under the aluminium plate to achieve steady results. Simulations were then carried out by considering the actuator windings star-connected and without a neutral connection. It was fed from a 60 Hz 3-phase source under the same conditions of current values obtained in experimental measurements. The simulations of the actuator were carried under static conditions, i.e., at a slip of 1. They gave an assessment of the distribution of the magnetic flux in the air-gap, and the thrust and normal forces under the static condition. The model was formed from 317,385 tetrahedral elements. The simulations utilized a time step of 0.0008 s, which provided 20 steps per period of the excitation voltage. The simulation employed a time lapse of 10 periods, which was a sufficient time period to achieve a steady-state behaviour.
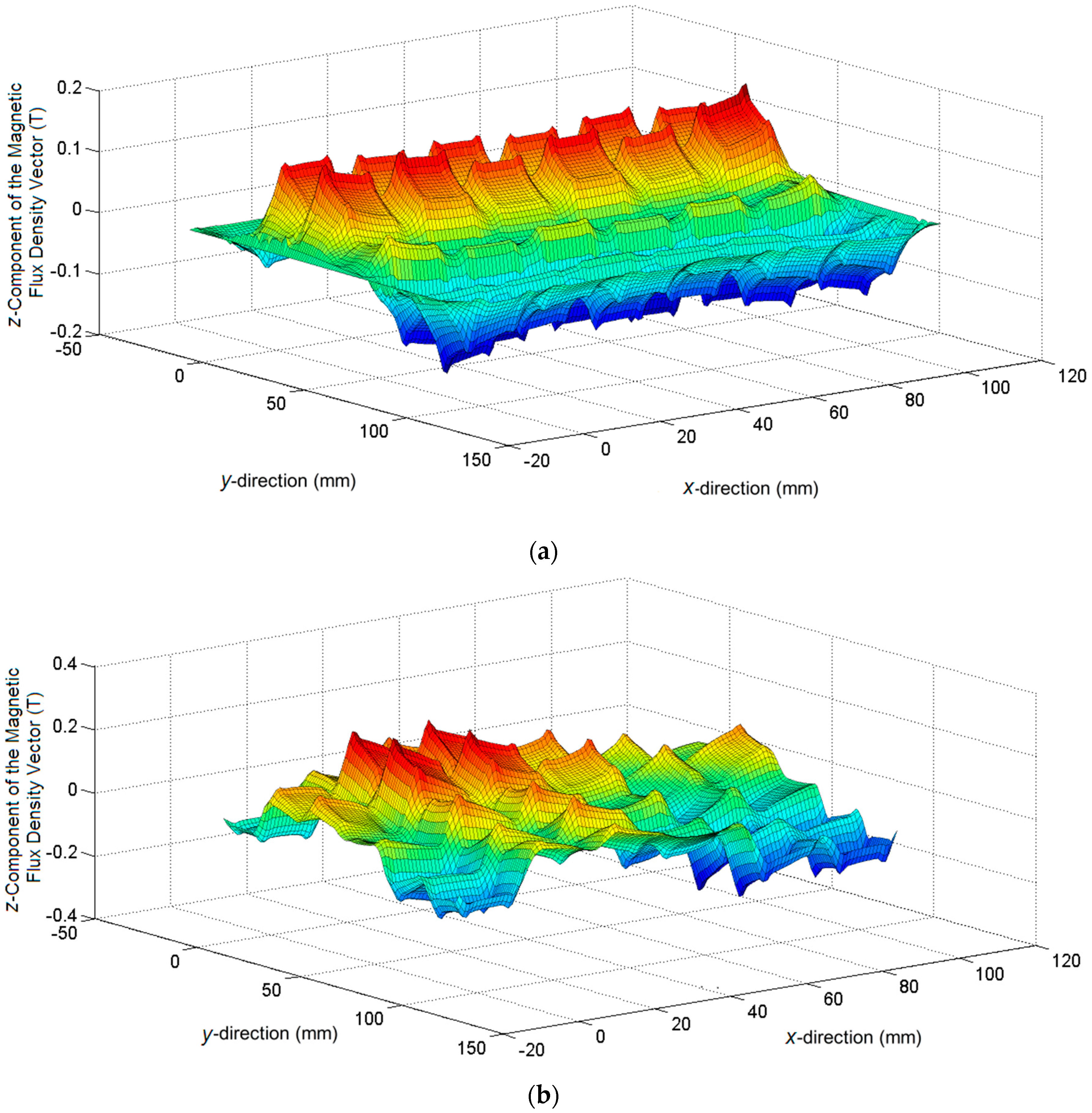
Figure 4 shows a surface plot of the
z-axis component of the magnetic flux density in the middle of the air-gap of the device considering the case 1. The line voltage is equal to 60 V
rms (1.25 A of current in each coil) and only the
y-axis winding is supplied in
Figure 4a, while in
Figure 4b, both
x and
y-windings are fed. It can be noted that there are peaks in the magnetic flux at the corners of each tooth, and that under some teeth in the same row, the flux density values are higher than others, and this pattern alternates. This is because coils closest to the air-gap have a larger contribution for the air-gap flux, and therefore a larger contribution to the force produced. The coils at the upper part of the teeth contribute less and have more leakage flux. From this figure, it is possible to verify the distortion of the air-gap magnetic field established by the currents in the primary, due to the eddy currents in the secondary. In addition, it also illustrates that it is necessary to alternate the coil location on the teeth in order ensure that the
x and
y axis characteristics are the same.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}