
Distributed Fiber-Optic Sensors for Vibration Detection


Abstract
:1. Introduction
2. Distributed Fiber-Optic Vibration Sensing Technology
2.1. Interferometric Sensing Technology
2.1.1. Sagnac
2.1.2. MZI
2.1.3. MI
2.1.4. Combinations of Sagnac, MZI, and MI
2.2. Backscattering-Based Sensing Technology
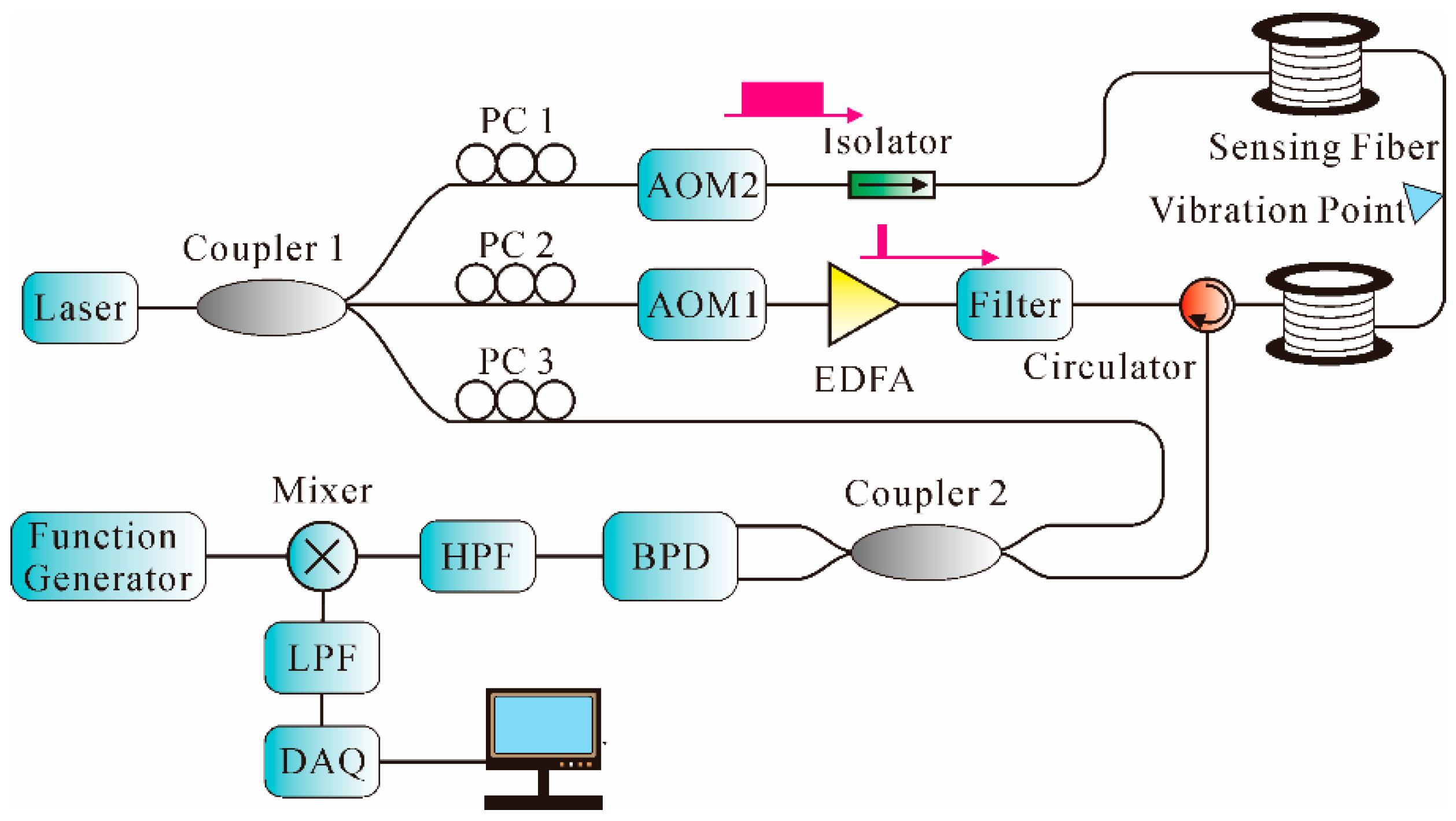
2.2.1. Φ-OTDR
2.2.2. POTDR
2.2.3. BOTDA and BOCDA
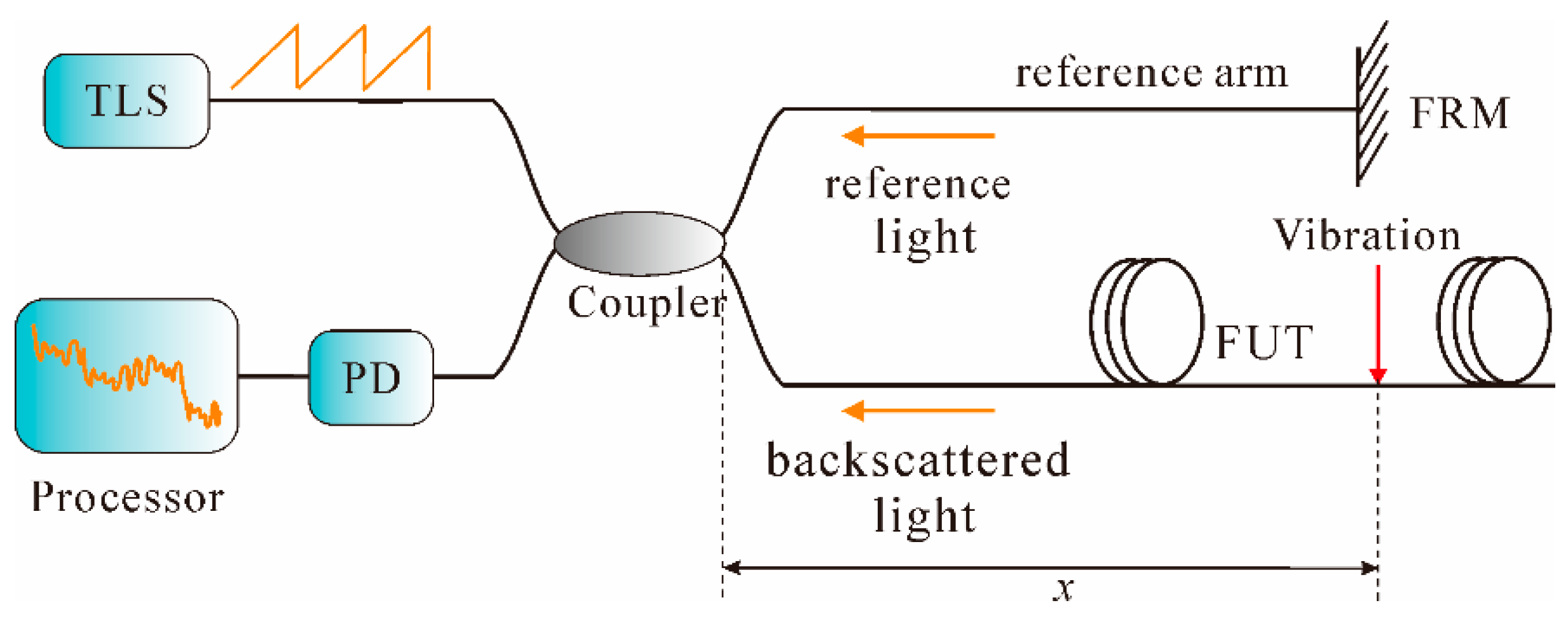
2.2.4. OFDR
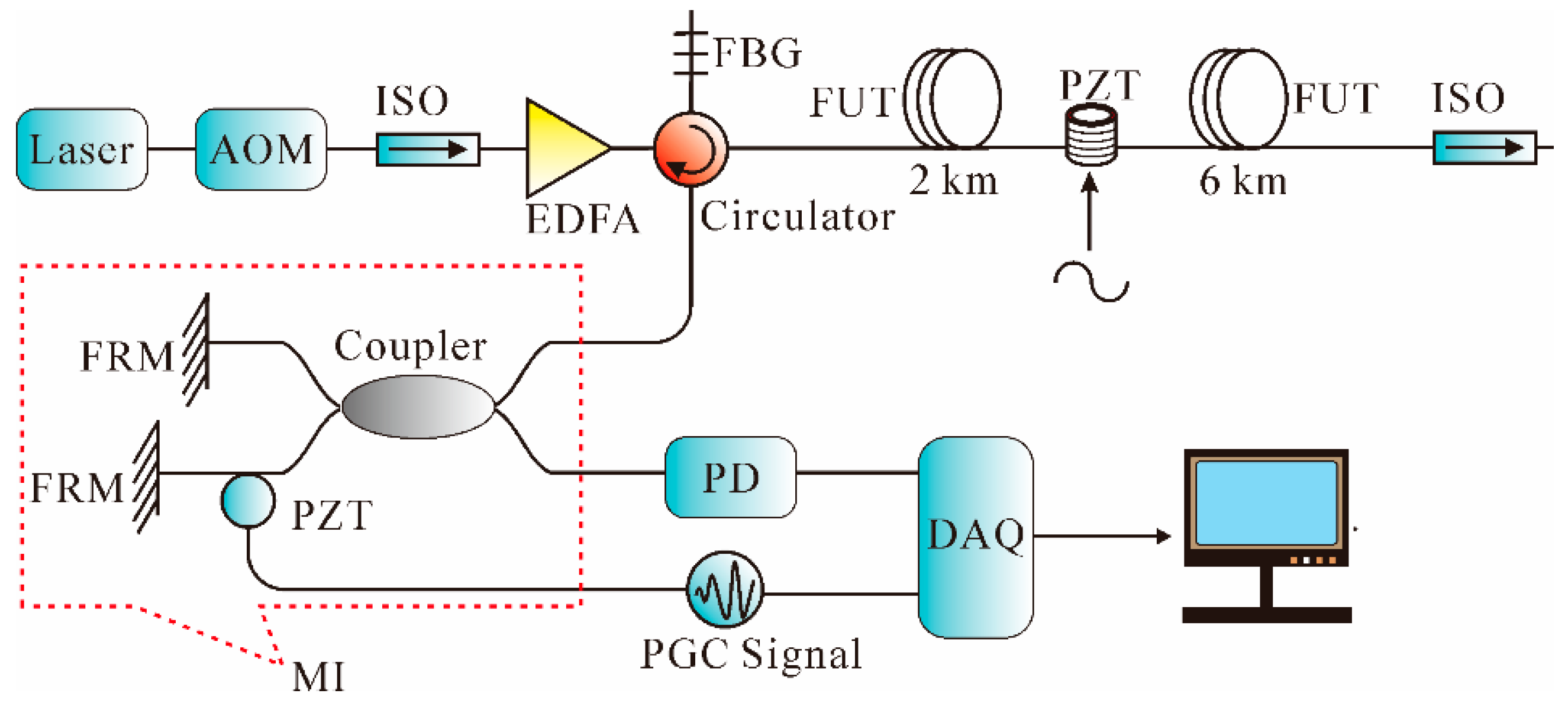
2.3. Combination of Interferometric and Backscattering-Based Sensing Technology
2.4. Summary of Distributed Fiber-Optic Vibration Sensors
3. Applications
3.1. Structural Health Monitoring (SHM)
3.2. Perimeter Security
3.3. Other Related Applications
4. Conclusions
Acknowledgments
Conflicts of Interest
References
- Adewuyi, A.P.; Wu, Z.; Serker, N.K. Assessment of vibration-based damage identification methods using displacement and distributed strain measurements. Struct. Health Monit. 2009, 8, 443–461. [Google Scholar] [CrossRef]
- Abas, Z.; Yang, D.H.; Kim, H.S.; Kwak, M.K.; Kim, J. Characterization of Electro-Active Paper Vibration Sensor by Impact Testing and Random Excitation. Int. J. Appl. Mech. 2015, 7, 1550065. [Google Scholar] [CrossRef]
- Tadigadapa, S.; Mateti, K. Piezoelectric MEMS sensors: State-of-the-art and perspectives. Meas. Sci. Technol. 2009, 20, 092001. [Google Scholar] [CrossRef]
- Lee, H.-C.; Bae, W.-H. Study on the Elimiation of Irreversible Magnetic Components Using Anhysteretization in a Magnetostrictive Vibration Sensor. Trans. Korean Soc. Noise Vib. Eng. 2010, 20, 841–848. [Google Scholar] [CrossRef]
- Chiang, C.-T.; Chang, C.-I.; Fang, W. Design of a Digitized Vibration Detector Implemented by CMOS Digitized Capacitive Transducer with In-Plane SoI Accelerometer. IEEE Sens. J. 2014, 14, 2546–2556. [Google Scholar] [CrossRef]
- Nam, S.-B.; Yun, G.-J.; Lim, S.-I. Development of the Inductive Proximity Sensor Module for Detection of Non-contact Vibration. J. Korea Soc. Comput. Inf. 2011, 16, 61–71. [Google Scholar] [CrossRef]
- Kishore, P.; Dinakar, D.; Srimannarayana, K.; Vengal Rao, P. Vibration sensor using 2 × 2 fiber optic coupler. Opt. Eng. 2013, 52, 107104. [Google Scholar] [CrossRef]
- Zhang, Z.; Bao, X. Continuous and Damped Vibration Detection Based on Fiber Diversity Detection Sensor by Rayleigh Backscattering. J. Lightwave Technol. 2008, 26, 832–838. [Google Scholar] [CrossRef]
- Linze, N.; Tihon, P.; Verlinden, O.; Mégret, P.; Wuilpart, M. Development of a multi-point polarization-based vibration sensor. Opt. Express 2013, 21, 5606–5624. [Google Scholar] [CrossRef] [PubMed]
- Sifta, R.; Munster, P.; Sysel, P.; Horvath, T.; Novotny, V.; Krajsa, O.; Filka, M. Distributed fiber-optic sensor for detection and localization of acoustic vibrations. Metrol. Meas. Syst. 2015, 22, 111–118. [Google Scholar] [CrossRef]
- Bang, H.-J.; Jun, S.-M.; Kim, C.-G. Stabilized interrogation and multiplexing techniques for fibre Bragg grating vibration sensors. Meas. Sci. Technol. 2005, 16, 813. [Google Scholar] [CrossRef]
- Liang, T.-C.; Lin, Y.-L. Ground vibrations detection with fiber optic sensor. Opt. Commun. 2012, 285, 2363–2367. [Google Scholar] [CrossRef]
- Lu, L.; Cao, Z.; Dai, J.; Xu, F.; Yu, B. Self-Mixing Signal in Codoped Distributed Bragg Reflector Fiber Laser for Remote Sensing Applications up to 20 Km. IEEE Photonics Technol. Lett. 2012, 24, 392–394. [Google Scholar] [CrossRef]
- Lu, L.; Yang, J.; Zhao, Y.; Du, Z.; Yu, B. Self-mixing interference in an all-fiberized configuration Er3+–Yb3+ codoped distributed Bragg reflector laser for vibration measurement. Curr. Appl. Phys. 2012, 12, 659–662. [Google Scholar] [CrossRef]
- Wang, C.; Zhou, Y.; Dong, H.; Tang, M.; Fu, S.; Shum, P. Quasi-distributed fiber sensor based on Fresnel-reflection-enhanced Incomplete-POTDR system. Proc. SPIE 2015, 9634. [Google Scholar] [CrossRef]
- Ren, M.; Lu, P.; Chen, L.; Bao, X. Theoretical and Experimental Analysis of Φ-OTDR Based on Polarization Diversity Detection. IEEE Photonics Technol. Lett. 2016, 28, 697–700. [Google Scholar] [CrossRef]
- Muanenda, Y.; Oton, C.J.; Faralli, S.; Pasquale, F.D. A Cost-Effective Distributed Acoustic Sensor Using a Commercial Off-the-Shelf DFB Laser and Direct Detection Phase-OTDR. IEEE Photonics J. 2016, 8, 1–10. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhu, T.; Hou, Y.; Chiang, K.S. All-fiber vibration sensor based on a Fabry-Perot interferometer and a microstructure beam. JOSA B 2013, 30, 1211–1215. [Google Scholar] [CrossRef]
- Sathitanon, N.; Pullteap, S. A fiber optic interferometric sensor for dynamic measurement. Measurements 2007, 7, 526–529. [Google Scholar]
- Giuliani, G.; Norgia, M.; Donati, S.; Bosch, T. Laser diode self-mixing technique for sensing applications. J. Opt. A Pure Appl. Opt. 2002, 4, S283–S294. [Google Scholar] [CrossRef]
- Chijioke, A.; Lawall, J. Laser Doppler vibrometer employing active frequency feedback. Appl. Opt. 2008, 47, 4952–4958. [Google Scholar] [CrossRef] [PubMed]
- Castellini, P.; Martarelli, M.; Tomasini, E.P. Laser Doppler vibrometry: Development of advanced solutions answering to technology’s needs. Mech. Syst. Signal Process. 2006, 20, 1265–1285. [Google Scholar] [CrossRef]
- Lima, H.F.; Vicente, R.D.S.; Nogueira, R.N.; Abe, I.; André, P.S.D.B.; Fernandes, C.; Rodrigues, H.; Varum, H.; Kalinowski, H.J.; Costa, A. Structural health monitoring of the church of Santa Casa da Misericórdia of Aveiro using FBG sensors. IEEE Sens. J. 2008, 8, 1236–1242. [Google Scholar] [CrossRef]
- Tiwari, U.; Mishra, V.; Jain, S.C.; Kesavan, K.; Ravisankar, K.; Singh, N.; Poddar, G.; Kapur, P. Health monitoring of steel and concrete structures using fibre Bragg grating sensors. Curr. Sci. 2009, 11, 1539–1543. [Google Scholar]
- Antunes, P.F.D.C.; Lima, H.F.; Alberto, N.J.; Rodrigues, H.; Pinto, P.M.; Pinto, P.M.; Nogueira, R.N.; Varum, H.; Costa, A.G.; de Brito André, P.S. Optical fiber accelerometer system for structural dynamic monitoring. IEEE Sens. J. 2009, 9, 1347–1354. [Google Scholar] [CrossRef]
- Weng, Y.; Qiao, X.; Feng, Z.; Hu, M.; Zhang, J.; Yang, Y. Compact FBG diaphragm accelerometer based on L-shaped rigid cantilever beam. Chin. Opt. Lett. 2011, 9, 100604. [Google Scholar] [CrossRef]
- Liu, Q.P.; Qiao, X.G.; Zhao, J.L.; Jia, Z.A.; Gao, H.; Shao, M. Novel fiber Bragg grating accelerometer based on diaphragm. IEEE Sens. J. 2012, 12, 3000–3004. [Google Scholar] [CrossRef]
- Taiwo, A.; Seyedzadeh, S.; Taiwo, S.; Sahbudin, R.K.Z.; Yaacob, M.H.; Mokhtar, M. Performance and comparison of fiber vibration sensing using SAC-OCDMA with direct decoding techniques. Opt. Int. J. Light Electron Opt. 2014, 125, 4803–4806. [Google Scholar] [CrossRef]
- Taiwo, A.; Taiwo, S.; Sahbudin, R.K.Z.; Yaacob, M.H.; Mokhtar, M. Fiber vibration sensor multiplexing techniques for quasi-distributed sensing. Opt. Laser Technol. 2014, 64, 34–40. [Google Scholar] [CrossRef]
- Xie, S.; Zhang, M.; Li, Y.; Liao, Y. The influence of fiber inhomogeneity on the positioning accuracy of distributed fiber vibration sensor. Proc. SPIE 2012, 8561. [Google Scholar] [CrossRef]
- Tu, D.; Xie, S.; Jiang, Z.; Zhang, M. Ultra long distance distributed fiber-optic system for intrusion detection. Proc. SPIE 2012, 8561. [Google Scholar] [CrossRef]
- Rao, Y.-J.; Luo, J.; Ran, Z.-L.; Yue, J.-F.; Luo, X.-D.; Zhou, Z. Long-distance fiber-optic Φ-OTDR intrusion sensing system. Proc. SPIE 2009, 7503. [Google Scholar] [CrossRef]
- Udd, E. A personal tour of the fiber optic Sagnac interferometer. Proc. SPIE 2009, 7316. [Google Scholar] [CrossRef]
- Chen, Q.; Jin, C.; Bao, Y.; Li, Z.; Li, J.; Lu, C.; Yang, L.; Li, G. A distributed fiber vibration sensor utilizing dispersion induced walk-off effect in a unidirectional Mach-Zehnder interferometer. Opt. Express 2014, 22, 2167–2173. [Google Scholar] [CrossRef] [PubMed]
- Tsuda, H.; Koo, J.-H.; Kishi, T. Detection of simulated acoustic emission with Michelson interferometric fiber-optic sensors. J. Mater. Sci. Lett. 2001, 20, 55–56. [Google Scholar] [CrossRef]
- Shatalin, S.V.; Treschikov, V.N.; Rogers, A.J. Interferometric optical time-domain reflectometry for distributed optical-fiber sensing. Appl. Opt. 1998, 37, 5600–5604. [Google Scholar] [CrossRef] [PubMed]
- Wang, J. The Design of Distributed Fiber Optic Vibration Sensing System--The Research and Design of The Modified Sagnac Structure. Master’s Thesis, Huazhong University of Science & Technology, Wuhan, China, December 2011. [Google Scholar]
- Udd, E. Sagnac distributed sensor concepts. Proc. SPIE 1992, 1586. [Google Scholar] [CrossRef]
- Kurmer, J.P.; Kingsley, S.A.; Laudo, J.S.; Krak, S.J. Distributed fiber optic acoustic sensor for leak detection. Proc. SPIE 1992, 1586. [Google Scholar] [CrossRef]
- Liu, Y.; Jia, J.; Tao, P.-L.; Yin, G.-L.; Tan, Z.-W.; Ren, W.-H.; Jian, S.-S. Signal processing of Sagnac fiber interferometer used as distributed sensor with wavelets. SPIE OSA 2010. [Google Scholar] [CrossRef]
- Spammer, S.J.; Swart, P.L.; Booysen, A. Interferometric distributed optical-fiber sensor. Appl. Opt. 1996, 35, 4522–4525. [Google Scholar] [CrossRef] [PubMed]
- Fang, X. A variable-loop Sagnac interferometer for distributed impact sensing. J. Lightwave Technol. 1996, 14, 2250–2254. [Google Scholar] [CrossRef]
- Spammer, S.J.; Swart, P.L.; Chtcherbakov, A.A. Distributed dual-wavelength Sagnac impact sensor. Microw. Opt. Technol. Lett. 1998, 17, 170–173. [Google Scholar] [CrossRef]
- Fang, X. Fiber-optic distributed sensing by a two-loop Sagnac interferometer. Opt. Lett. 1996, 21, 444–446. [Google Scholar] [CrossRef] [PubMed]
- Omori, T.; Hashimoto, K.-Y.; Yamaguchi, M. A position-detectable optical distributed vibration sensor using an additional sub-loop. In Proceedings of the IEEE Sensors, Vienna, Austria, 24–27 October 2004; pp. 583–586.
- Wada, K.; Narui, H.; Yamamoto, D.; Matsuyama, T.; Horinaka, H. Balanced polarization maintaining fiber Sagnac interferometer vibration sensor. Opt. Express 2011, 19, 21467–21474. [Google Scholar] [CrossRef] [PubMed]
- Lin, W.-W. Novel distributed fiber optic leak detection system. Opt. Eng. 2004, 43, 278–279. [Google Scholar] [CrossRef]
- He, C.; Zheng, X.; Luo, J.; Hang, L.; Xu, X.; Huang, H. Research on leak detection system for pipeline network based on distributed optical fiber sensing array technology. Opt. Technol. 2011, 37, 76–79. [Google Scholar]
- Russell, S.J.; Brady, K.R.; Dakin, J.P. Real-time location of multiple time-varying strain disturbances, acting over a 40-km fiber section, using a novel dual-Sagnac interferometer. J. Lightwave Technol. 2001, 19, 205. [Google Scholar] [CrossRef]
- Wu, D.F.; Zhang, T.Z.; Jia, B. Modified Sagnac interferometer for distributed disturbance detection. Microw. Opt. Technol. Lett. 2008, 50, 1608–1610. [Google Scholar] [CrossRef]
- Wang, H.; Sun, Q.; Li, X.; Wo, J.; Shum, P.P.; Liu, D. Improved location algorithm for multiple intrusions in distributed Sagnac fiber sensing system. Opt. Express 2014, 22, 7587–7597. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Pi, S.; Jia, B.; Sun, Q.; Zhao, D. Location performance fading for multiple disturbances in distributed Sagnac optical fiber interferometer. Microwave Opt. Technol. Lett. 2015, 57, 2294–2298. [Google Scholar] [CrossRef]
- Liang, S.; Zhang, C.-X.; Lin, B.; Lin, W.-T.; Li, Q.; Zhong, X.; Li, L.-J. Influences of semiconductor laser on fibre-optic distributed disturbance sensor based on Mach-Zehnder interferometer. Chin. Phys. B 2010, 19, 124217. [Google Scholar] [CrossRef]
- Yuan, J.; Zhan, C.; Sun, Q.; Liu, D.; He, Y. A novel distributed sensor using optical fiber. Proc. SPIE 2005, 6019. [Google Scholar] [CrossRef]
- Qu, Z.; Zhou, Y.; Zeng, Z.; Feng, H.; Zhang, Y.; Jin, S. Detection of the abnormal events along the oil and gas pipeline and multi-scale chaotic character analysis of the detected signals. Meas. Sci. Technol. 2008, 19, 025301. [Google Scholar] [CrossRef]
- Chen, P.; Cai, Y.; Li, J.; Meng, J.; Feng, H.; Jin, S. Study on Modified Mach-Zehnder Interferometer Based Pipeline Security and Pre-Warning System. Chin. J. Sens. Actuators 2009, 22, 1661–1664. [Google Scholar]
- Kiźlik, B. Fibre optic distributed sensor in Mach-Zehnder interferometer configuration. In Proceedings of the International Conference on Modern Problems of Radio Engineering, Telecommunications and Computer Science, Lviv-Slavsko, Ukraine, 18–23 February 2002; pp. 128–130.
- Kumar, A.; Bar-Shalom, Y. Time-domain analysis of cross correlation for time delay estimation with an autocorrelated signal. IEEE Trans. Signal Process. 1993, 41, 1664–1668. [Google Scholar] [CrossRef]
- Sun, Q.; Liu, D.; Wang, J.; Liu, H. Distributed fiber-optic vibration sensor using a ring Mach-Zehnder interferometer. Opt. Commun. 2008, 281, 1538–1544. [Google Scholar] [CrossRef]
- Zhang, C.-X.; Liang, S.; Feng, X.-J.; Lin, W.-T.; Li, C.; Li, Q.; Zhong, X.; Li, L.-J. Spectra and Influences of Rayleigh and Stimulated Brillouin Scattering in Fiber-Optic Distributed Disturbance Sensor. Spectrosc. Spectr. Anal. 2011, 31, 1862–1867. [Google Scholar]
- Liang, S.; Zhang, C.; Lin, W.; Li, L.; Li, C.; Feng, X.; Lin, B. Fiber-optic intrinsic distributed acoustic emission sensor for large structure health monitoring. Opt. Lett. 2009, 34, 1858–1860. [Google Scholar] [CrossRef] [PubMed]
- Xie, S.; Zhang, M.; Li, Y.; Liao, Y. Positioning Error Reduction Technique Using Spectrum Reshaping for Distributed Fiber Interferometric Vibration Sensor. J. Lightwave Technol. 2012, 30, 3520–3524. [Google Scholar] [CrossRef]
- Lin, W.; Lou, S.; Liang, S. A modified phase generation carrier technique for fiber-optic distributed disturbance sensor. Opt. Int. J. Light Electron Opt. 2014, 125, 942–945. [Google Scholar] [CrossRef]
- Chen, Q.; Liu, T.; Liu, K.; Jiang, J.; Shen, Z.; Ding, Z.; Hu, H.; Huang, X.; Pan, L.; Ma, C. An Improved Positioning Algorithm with High Precision for Dual Mach-Zehnder Interferometry Disturbance Sensing System. J. Lightwave Technol. 2015, 33, 1954–1960. [Google Scholar] [CrossRef]
- Liang, S.; Sheng, X.; Lou, S.; Wang, P.; Zhang, Y. Novel Lissajous figure based location method for fiber-optic distributed disturbance sensor. Opt. Int. J. Light Electron Opt. 2015, 126, 4362–4366. [Google Scholar] [CrossRef]
- Li, T.; Wang, A.; Murphy, K.; Claus, R. White-light scanning fiber Michelson interferometer for absolute position–distance measurement. Opt. Lett. 1995, 20, 785–787. [Google Scholar] [CrossRef] [PubMed]
- Weir, K.; Boyle, W.; Meggit, B.; Palmer, A.; Grattan, K. A novel adaptation of the Michelson interferometer for the measurement of vibration. J. Lightwave Technol. 1992, 10, 700–703. [Google Scholar] [CrossRef]
- Ferrari, J.A.; García, P. Optical-fiber vibration sensor using step interferometry. Appl. Opt. 1996, 35, 5667–5669. [Google Scholar] [CrossRef] [PubMed]
- Chojnacki, M.; Szustakowski, M.; Zyczkowski, M. Unbalanced Michelson’s interferometer as a fiber optic distributed sensor of external signals. Proc. SPIE 2001, 4535. [Google Scholar] [CrossRef]
- Hong, X.; Wu, J.; Zuo, C.; Liu, F.; Guo, H.; Xu, K. Dual Michelson interferometers for distributed vibration detection. Appl. Opt. 2011, 50, 4333–4338. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Wu, H.; Zhang, X.; Zhang, Z.; Li, M. Distributed fiber optic sensor employing phase generate carrier for disturbance detection and location. Proc. SPIE 2015, 9525. [Google Scholar] [CrossRef]
- Dakin, J.P.; Pearce, D.J.; Strong, A.P.; Wade, C.A. A Novel Distributed Optical Fibre Sensing System Enabling Location of Disturbances in a Sagnac Loop Interferometer. In Proceedings of the Fiber Optic and Laser Sensors V, San Diego, CA, USA, 17 August 1986; pp. 325–328.
- Chtcherbakov, A.A.; Swart, P.L.; Spammer, S.J.; Lacquet, B.M. Modified sagnac/mach-zehnder interferometer for distributed disturbance sensing. Microwave Opt. Technol. Lett. 1998, 20, 34–36. [Google Scholar] [CrossRef]
- Li, X.; Sun, Q.; Wo, J.; Zhang, M.; Liu, D. Hybrid TDM/WDM-Based Fiber-Optic Sensor Network for Perimeter Intrusion Detection. J. Lightwave Technol. 2012, 30, 1113–1120. [Google Scholar] [CrossRef]
- Zhen, S.; Chen, J.; Li, H.; Wang, X.; Zhang, B.; Yu, B. Low-Coherence Fiber Differential Interferometer with Adjustable Measurement Range. IEEE Photonics Technol. Lett. 2015, 27, 895–898. [Google Scholar] [CrossRef]
- Zhen, S.; Chen, J.; Li, H.; Wang, X.; Cao, Z.; Zhu, J.; Xu, F.; Yu, B. Triple detection fiber differentiating interferometer based on low-coherence interferometer and its passive demodulation scheme. Opt. Laser Technol. 2015, 73, 63–68. [Google Scholar] [CrossRef]
- Spammer, S.J.; Swart, P.L.; Chtcherbakov, A.A. Merged Sagnac-Michelson interferometer for distributed disturbance detection. Lightwave Technol. J. 1997, 15, 972–976. [Google Scholar] [CrossRef]
- Kondrat, M.; Szustakowski, M.; Pałka, N.; Ciurapiński, W.; Życzkowski, M. A Sagnac-Michelson fibre optic interferometer: Signal processing for disturbance localization. Opto-Electron. Rev. 2007, 15, 127–132. [Google Scholar] [CrossRef]
- Bao, X.; Chen, L. Recent progress in distributed fiber optic sensors. Sensors 2012, 12, 8601–8639. [Google Scholar] [CrossRef] [PubMed]
- Danielson, B.L. Optical time-domain reflectometer specifications and performance testing. Appl. Opt. 1985, 24, 2313–2322. [Google Scholar] [CrossRef] [PubMed]
- Barnoski, M.; Jensen, S. Fiber waveguides: A novel technique for investigating attenuation characteristics. Appl. Opt. 1976, 15, 2112–2115. [Google Scholar] [CrossRef] [PubMed]
- Juarez, J.C. Distributed Fiber Optic Intrusion Sensor System for Monitoring Long Perimeters. Ph.D. Dissertation, Texas A&M University, College Station, TX, USA, August 2005. [Google Scholar]
- Taylor, H.F.; Lee, C.E. Apparatus and Method for Fiber Optic Intrusion Sensing. U.S. 5194847 A, 16 March 1993. [Google Scholar]
- Healey, P. Fading in heterodyne OTDR. Electron. Lett. 1984, 20, 30–32. [Google Scholar] [CrossRef]
- Park, J.; Taylor, H.F. Fiber optic intrusion sensor using coherent optical time domain reflectometer. Jpn. J. Appl. Phys. 2003, 42, 3481–3482. [Google Scholar] [CrossRef]
- Park, J.; Lee, W.; Taylor, H.F. Fiber optic intrusion sensor with the configuration of an optical time-domain reflectometer using coherent interference of Rayleigh backscattering. In Proceedings of the SPIE 3555, Optical and Fiber Optic Sensor Systems, Beijing, China, 16 September 1998; pp. 49–56.
- Juarez, J.C.; Maier, E.W.; Choi, K.N.; Taylor, H.F. Distributed Fiber-Optic Intrusion Sensor System. J. Lightwave Technol. 2005, 23, 2081. [Google Scholar] [CrossRef]
- Juarez, J.C.; Taylor, H.F. Polarization discrimination in a phase-sensitive optical time-domain reflectometer intrusion-sensor system. Opt. Lett. 2005, 30, 3284–3286. [Google Scholar] [CrossRef] [PubMed]
- Juarez, J.C.; Taylor, H.F. Field test of a distributed fiber-optic intrusion sensor system for long perimeters. Appl. Opt. 2007, 46, 1968–1971. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.; Zhu, T.; Chen, L.; Bao, X. Distributed Vibration Sensor Based on Coherent Detection of Phase-OTDR. J. Lightwave Technol. 2010, 28, 3243–3249. [Google Scholar]
- Qin, Z.; Zhu, T.; Chen, L.; Bao, X. High sensitivity distributed vibration sensor based on polarization-maintaining configurations of phase-OTDR. IEEE Photonics Technol. Lett. 2011, 23, 1091–1093. [Google Scholar] [CrossRef]
- Martins, H.; Martin-Lopez, S.; Corredera, P.; Filograno, M.L.; Frazao, O.; González-Herráez, M. Coherent noise reduction in high visibility phase-sensitive optical time domain reflectometer for distributed sensing of ultrasonic waves. Lightwave Technol. J. 2013, 31, 3631–3637. [Google Scholar] [CrossRef]
- Qin, Z.; Chen, L.; Bao, X. Distributed vibration/acoustic sensing with high frequency response and spatial resolution based on time-division multiplexing. Opt. Commun. 2014, 331, 287–290. [Google Scholar] [CrossRef]
- Munster, P.; Vojtěch, J.; Sysel, P.; Sifta, R.; Novotny, V.; Horvath, T.; Sima, S.; Filka, M. Φ-OTDR signal amplification. Proc. SPIE 2015, 9506. [Google Scholar] [CrossRef]
- Choi, K.N.; Taylor, H.F. Spectrally stable Er-fiber laser for application in phase-sensitive optical time-domain reflectometry. IEEE Photonics Technol. Lett. 2003, 15, 386–388. [Google Scholar] [CrossRef]
- Rao, Y. OFS research over the last 10 years at CQU & UESTC. Photonic Sens. 2012, 2, 97–117. [Google Scholar]
- Martins, H.F.; Martin-Lopez, S.; Corredera, P.; Salgado, P.; Frazão, O.; González-Herráez, M. Modulation instability-induced fading in phase-sensitive optical time-domain reflectometry. Opt. Lett. 2013, 38, 872–874. [Google Scholar] [CrossRef] [PubMed]
- Martins, H.F.; Martin-Lopez, S.; Corredera, P.; Filograno, M.L.; Frazao, O.; Gonzalez-Herráez, M. Phase-sensitive optical time domain reflectometer assisted by first-order raman amplification for distributed vibration sensing over >100 km. J. Lightwave Technol. 2014, 32, 1510–1518. [Google Scholar] [CrossRef]
- Martins, H.; Martin-Lopez, S.; Corredera, P.; Ania-Castanon, J.D.; Frazao, O.; Gonzalez-Herraez, M. Distributed vibration sensing over 125 km with enhanced SNR using phi-OTDR over an URFL cavity. J. Lightwave Technol. 2015, 33, 2628–2632. [Google Scholar] [CrossRef]
- Peng, F.; Wu, H.; Jia, X.-H.; Rao, Y.-J.; Wang, Z.-N.; Peng, Z.-P. Ultra-long high-sensitivity Φ-OTDR for high spatial resolution intrusion detection of pipelines. Opt. Express 2014, 22, 13804–13810. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Zeng, J.; Li, J.; Fan, M.; Wu, H.; Peng, F.; Zhang, L.; Zhou, Y.; Rao, Y. Ultra-long phase-sensitive OTDR with hybrid distributed amplification. Opt. Lett. 2014, 39, 5866–5869. [Google Scholar] [CrossRef] [PubMed]
- Qin, Z.; Chen, L.; Bao, X. Wavelet denoising method for improving detection performance of distributed vibration sensor. IEEE Photonics Technol. Lett. 2012, 24, 542–544. [Google Scholar] [CrossRef]
- Qin, Z.; Chen, L.; Bao, X. Continuous wavelet transform for non-stationary vibration detection with phase-OTDR. Opt. Express 2012, 20, 20459–20465. [Google Scholar] [CrossRef] [PubMed]
- Zhu, T.; Xiao, X.; He, Q.; Diao, D. Enhancement of SNR and Spatial Resolution in-OTDR System by Using Two-Dimensional Edge Detection Method. Lightwave Technol. J. 2013, 31, 2851–2856. [Google Scholar] [CrossRef]
- Wu, H.-J.; Wang, J.; Wu, X.-W.; Wu, Y. Real intrusion detection for distributed fiber fence in practical strong fluctuated noisy backgrounds. Sens. Lett. 2012, 10, 1557–1561. [Google Scholar] [CrossRef]
- Hui, X.; Zheng, S.; Zhou, J.; Chi, H.; Jin, X.; Zhang, X. Hilbert–Huang Transform Time-Frequency Analysis in-OTDR Distributed Sensor. IEEE Photonics Technol. Lett. 2014, 26, 2403–2406. [Google Scholar] [CrossRef]
- Yue, H.; Zhang, B.; Wu, Y.; Zhao, B.; Li, J.; Ou, Z.; Liu, Y. Simultaneous and signal-to-noise ratio enhancement extraction of vibration location and frequency information in phase-sensitive optical time domain reflectometry distributed sensing system. Opt. Eng. 2015, 54. [Google Scholar] [CrossRef]
- Tu, G.; Zhang, X.; Zhang, Y.; Zhu, F.; Xia, L.; Nakarmi, B. The Development of an Phi-OTDR System for Quantitative Vibration Measurement. IEEE Photonics Technol. Lett. 2015, 27, 1349–1352. [Google Scholar] [CrossRef]
- Zhou, L.; Wang, F.; Wang, X.; Pan, Y.; Sun, Z.; Hua, J.; Zhang, X. Distributed Strain and Vibration Sensing System Based on Phase-Sensitive OTDR. IEEE Photonics Technol. Lett. 2015, 27, 1884–1887. [Google Scholar] [CrossRef]
- Rogers, A.J. Polarization-optical time domain reflectometry: A technique for the measurement of field distributions. Appl. Opt. 1981, 20, 1060–1074. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y. Research on Distributed Optic Fiber sensor Based on P-OTDR. Master’s Thesis, Beijing Jiaotong University, Beijing, China, December 2006. [Google Scholar]
- Zhang, Z.; Bao, X. Distributed optical fiber vibration sensor based on spectrum analysis of Polarization-OTDR system. Opt. Express 2008, 16, 10240–10247. [Google Scholar] [CrossRef] [PubMed]
- Linze, N.; Mégret, P.; Wuilpart, M. Development of an intrusion sensor based on a polarization-OTDR system. IEEE J. Sens. 2012, 12, 3005–3009. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, X.; Wang, X.; Chen, H. Distributed fiber strain and vibration sensor based on Brillouin optical time-domain reflectometry and polarization optical time-domain reflectometry. Opt. Lett. 2013, 38, 2437–2439. [Google Scholar] [CrossRef] [PubMed]
- Peng, F.; Wang, Z.; Rao, Y.-J.; Jia, X.-H. 106 km fully-distributed fiber-optic fence based on P-OTDR with 2nd-order Raman amplification. In Proceedings of the Optical Fiber Communication Conference/National Fiber Optic Engineers Conference 2013, Anaheim, CA, USA, 17 March 2013.
- Wang, X.; Yan, Z.; Wang, F.; Sun, Z.; Mou, C.; Zhang, X.; Zhang, L. SNR Enhanced Distributed Vibration Fiber Sensing System Employing Polarization OTDR and Ultraweak FBGs. IEEE Photonics J. 2015, 7, 1–11. [Google Scholar] [CrossRef]
- Wu, H.; Liu, J.; Atubga, D.; Zhang, L.; Rao, Y. Novel multi-point disturbance detection method for polarization-sensitive optical time domain reflectometry. Proc. SPIE 2015, 9634. [Google Scholar] [CrossRef]
- Chen, M.; Wang, F.; Zhang, X.; Hu, J.; Wang, X.; Zhu, C. Detection of multiple vibration points using fundamental frequency and harmonic progressions in response spectra of POTDR. Opt. Int. J. Light Electron Opt. 2013, 124, 5262–5266. [Google Scholar] [CrossRef]
- Horiguchi, T.; Tateda, M. BOTDA-Non destructive measurement of single-mode optical fiber attenuation characteristics using brillouin interaction: Theory. J. Lightwave Technol. 1989, 7, 1170–1176. [Google Scholar] [CrossRef]
- Bernini, R.; Minardo, A.; Zeni, L. Dynamic strain measurement in optical fibers by stimulated Brillouin scattering. Opt. Lett. 2009, 34, 2613–2615. [Google Scholar] [CrossRef] [PubMed]
- Cui, Q.; Pamukcu, S.; Xiao, W.; Pervizpour, M. Truly distributed fiber vibration sensor using pulse base BOTDA with wide dynamic range. IEEE Photonics Technol. Lett. 2011, 23, 1887–1889. [Google Scholar] [CrossRef]
- Peled, Y.; Motil, A.; Yaron, L.; Tur, M. Slope-assisted fast distributed sensing in optical fibers with arbitrary Brillouin profile. Opt. Express 2011, 19, 19845–19854. [Google Scholar] [CrossRef] [PubMed]
- Peled, Y.; Motil, A.; Kressel, I.; Tur, M. Monitoring the propagation of mechanical waves using an optical fiber distributed and dynamic strain sensor based on BOTDA. Opt. Express 2013, 21, 10697–10705. [Google Scholar] [CrossRef] [PubMed]
- Peled, Y.; Motil, A.; Tur, M. Fast Brillouin optical time domain analysis for dynamic sensing. Opt. Express 2011, 20, 8584–8591. [Google Scholar] [CrossRef] [PubMed]
- Dong, Y.; Ba, D.; Jiang, T.; Zhou, D.; Zhang, H.; Zhu, C.; Lu, Z.; Li, H.; Chen, L.; Bao, X. High-Spatial-Resolution Fast BOTDA for Dynamic Strain Measurement Based on Differential Double-Pulse and Second-Order Sideband of Modulation. IEEE Photonics J. 2013, 5. [Google Scholar] [CrossRef]
- Taki, M.; Muanenda, Y.; Oton, C.J.; Nannipieri, T.; Signorini, A.; Di Pasquale, F. Cyclic pulse coding for fast BOTDA fiber sensors. Opt. Lett. 2013, 38, 2877–2880. [Google Scholar] [CrossRef] [PubMed]
- Hotate, K.; Ong, S.S. Distributed dynamic strain measurement using a correlation-based Brillouin sensing system. IEEE Photonics Technol. Lett. 2003, 15, 272–274. [Google Scholar] [CrossRef]
- Song, K.-Y.; Hotate, K. Distributed fiber strain sensor with 1 kHz sampling rate based on Brillouin optical correlation domain analysis. IEEE Photonics Technol. Lett. 2007, 19, 1928–1930. [Google Scholar] [CrossRef]
- Song, K.Y.; Kishi, M.; He, Z.; Hotate, K. High-repetition-rate distributed Brillouin sensor based on optical correlation-domain analysis with differential frequency modulation. Opt. Lett. 2011, 36, 2062–2064. [Google Scholar] [CrossRef] [PubMed]
- Eickhoff, W.; Ulrich, R. Optical frequency domain reflectometry in single-mode fiber. Appl. Phys. Lett. 1981, 39, 693–695. [Google Scholar] [CrossRef]
- Liu, Q.; Fan, X.; He, Z. Time-gated digital optical frequency domain reflectometry with 1.6-m spatial resolution over entire 110-km range. Opt. Express 2015, 23, 25988–25995. [Google Scholar] [CrossRef] [PubMed]
- Ding, Z.; Yao, X.S.; Liu, T.; Du, Y.; Liu, K.; Han, Q.; Meng, Z.; Chen, H. Long-range vibration sensor based on correlation analysis of optical frequency-domain reflectometry signals. Opt. Express 2012, 20, 28319–28329. [Google Scholar] [CrossRef] [PubMed]
- Froggatt, M.; Moore, J. High-spatial-resolution distributed strain measurement in optical fiber with Rayleigh scatter. Appl. Opt. 1998, 37, 1735–1740. [Google Scholar] [CrossRef] [PubMed]
- Soller, B.J.; Kreger, S.T.; Gifford, D.K.; Wolfe, M.S.; Froggatt, M.E. Optical Frequency Domain Reflectometry for Single- and Multi-Mode Avionics Fiber-Optics Applications. In Proceedings of the IEEE Conference on Avionics Fiber-Optics and Photonics, Annapolis, MD, USA, 12–14 September 2006; pp. 38–39.
- Zhou, D.-P.; Qin, Z.; Li, W.; Chen, L.; Bao, X. Distributed vibration sensing with time-resolved optical frequency-domain reflectometry. Opt. Express 2012, 20, 13138–13145. [Google Scholar] [CrossRef] [PubMed]
- Arbel, D.; Eyal, A. Dynamic optical frequency domain reflectometry. Opt. Express 2014, 22, 8823–8830. [Google Scholar] [CrossRef] [PubMed]
- Ding, Z.; Yao, X.S.; Liu, T.; Du, Y.; Liu, K.; Jiang, J.; Meng, Z.; Chen, H. Compensation of laser frequency tuning nonlinearity of a long range OFDR using deskew filter. Opt. Express 2013, 21, 3826–3834. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Du, Y.; Ding, Z.; Liu, K.; Zhou, Y.; Jiang, J. 40-km OFDR-Based Distributed Disturbance Optical Fiber Sensor. IEEE Photonics Technol. Lett. 2016, 28, 771–774. [Google Scholar] [CrossRef]
- Wang, S.; Fan, X.; Liu, Q.; He, Z. Distributed fiber-optic vibration sensing based on phase extraction from time-gated digital OFDR. Opt. Express 2015, 23, 33301–33309. [Google Scholar] [CrossRef] [PubMed]
- Zhu, T.; He, Q.; Xiao, X.; Bao, X. Modulated pulses based distributed vibration sensing with high frequency response and spatial resolution. Opt. Express 2013, 21, 2953–2963. [Google Scholar] [CrossRef] [PubMed]
- He, Q.; Zhu, T.; Xiao, X.; Zhang, B.; Diao, D.; Bao, X. All fiber distributed vibration sensing using modulated time-difference pulses. IEEE Photonics Technol. Lett. 2013, 25, 1955–1957. [Google Scholar] [CrossRef]
- Fang, G.S.; Xu, T.W.; Feng, S.W.; Li, F. Phase-Sensitive Optical Time Domain Reflectometer Based on Phase-Generated Carrier Algorithm. J. Lightwave Technol. 2015, 33, 2811–2816. [Google Scholar] [CrossRef]
- Shi, Y.; Feng, H.; Zeng, Z. Distributed fiber sensing system with wide frequency response and accurate location. Opt. Lasers Eng. 2015, 77, 219–224. [Google Scholar] [CrossRef]
- Posey, R.; Johnson, G.; Vohra, S. Strain sensing based on coherent Rayleigh scattering in an optical fibre. Electron. Lett. 2000, 36, 1688–1689. [Google Scholar] [CrossRef]
- Masoudi, A.; Belal, M.; Newson, T. A distributed optical fibre dynamic strain sensor based on phase-OTDR. Meas. Sci. Technol. 2013, 24, 085204. [Google Scholar] [CrossRef]
- Wei, P.; Shan, X.; Sun, X. Frequency response of distributed fiber-optic vibration sensor based on nonbalanced Mach-Zehnder interferometer. Opt. Fiber Technol. 2013, 19, 47–51. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhuang, S. Optical fiber distributed vibration sensing system using time-varying gain amplification method. Opt. Eng. 2014, 53. [Google Scholar] [CrossRef]
- Li, H.-N.; Li, D.-S.; Song, G.-B. Recent applications of fiber optic sensors to health monitoring in civil engineering. Eng. Struct. 2004, 26, 1647–1657. [Google Scholar] [CrossRef]
- Kersey, A.D. A Review of Recent Developments in Fiber Optic Sensor Technology. Opt. Fiber Technol. 1996, 2, 291–317. [Google Scholar] [CrossRef]
- Feng, H.; Zhu, L.; Jin, S.; Zhou, Y.; Zeng, Z.; Zhuge, J. Modeling of pipeline leakage detection and prewarning system for locating error analysis based on Jones matrix. J. Jpn. Pet. Inst. 2009, 52, 114–119. [Google Scholar] [CrossRef]
- Frings, J.; Walk, T. Distributed fiber optic sensing enhances pipeline safety and security. Oil Gas Eur. Mag. 2011, 3, 132–136. [Google Scholar]
- Huang, S.-C.; Lin, W.-W.; Tsai, M.-T.; Chen, M.-H. Fiber optic in-line distributed sensor for detection and localization of the pipeline leaks. Sens. Actuators A Phys. 2007, 135, 570–579. [Google Scholar] [CrossRef]
- Li, Y.; Liu, T.; Wang, S.; Liu, K.; Lv, D.; Jiang, J.; Ding, Z.; Chen, Q.; Wang, B.; Li, D.; et al. All fiber distributed long-distance perimeter security monitoring system with video linkage function. J. Optoelectron. Laser 2013, 24, 1752–1757. [Google Scholar]
- Wu, H.; Wang, Z.; Peng, F.; Peng, Z.; Li, X.; Wu, Y.; Rao, Y. Field test of a fully distributed fiber optic intrusion detection system for long-distance security monitoring of national borderline. Proc. SPIE 2014, 9157. [Google Scholar] [CrossRef]
- Wu, X.; Wu, H.; Rao, Y.; Wu, Y.; Zhao, T. Low Misstatement Rate Distributed Optical Fiber Fence Intrusion Detection System by Variety of Wavelet Decomposition Method. Acta Photonica Sin. 2011, 40, 1692–1696. [Google Scholar]
- Kumagai, T.; Sato, S.; Nakamura, T. Fiber-optic vibration sensor for physical security system. In Proceedings of the IEEE International Conference on Condition Monitoring and Diagnosis, Bali, Indonesia, 23–27 September 2012; pp. 1171–1174.
- Lin, W.; Liang, S.; Lou, S.; Sheng, X.; Wang, P.; Zhang, Y. A novel fiber-optic distributed disturbance sensor system with low false alarm rate. Infrared Laser Eng. 2015, 44, 1845–1848. [Google Scholar]
- Xu, W.; Zhang, C.; Liang, S.; Li, L.; Lin, W.; Yang, Y. Fiber-optic distributed sensor based on a Sagnac interferometer with a time delay loop for detecting time-varying disturbance. Microw. Opt. Technol. Lett. 2009, 51, 2564–2567. [Google Scholar] [CrossRef]
- Zhang, C.; Zhong, X.; Li, L.; Li, Q. Long-distance intrusion sensor based on phase sensitivity optical time domain reflectometry. Infrared Laser Eng. 2015, 44, 742–746. [Google Scholar]
- Frignet, B.; Hartog, A.H.; Mackie, D.; Kotov, O.I.; Liokumovich, L.B. Distributed vibration sensing on optical fibre: Field testing in borehole seismic applications. Proc. SPIE 2014, 9157. [Google Scholar] [CrossRef]
- Dixon, T.; Herzog, H.; Twinning, S.; Paulsson, B.N.P.; Thornburg, J.; He, R. A Fiber Optic Borehole Seismic Vector Sensor System for High Resolution CCUS Site Characterization and Monitoring. Energy Proc. 2014, 63, 4323–4338. [Google Scholar]
- Hartog, A.; Frignet, B.; Mackie, D.; Clark, M. Vertical seismic optical profiling on wireline logging cable. Geophys. Prospect. 2014, 62, 693–701. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Group | Distance (km) | SR/ Position Accuracy (m) | Frequency? Yes/No (Hz) | Multi-point? Yes/No | Year | Reference |
|---|---|---|---|---|---|---|---|
| Sagnac | University of Kansas, USA. | 0.18 | 1 | Y | N | 1996 | [42] |
| Rand Afrikaans University, South Africa | 0.2 | - | Y | N | 1998 | [43] | |
| Virginia Polytechnic Institute and State University, USA | 0.8 | - | Y | N | 1996 | [44] | |
| University of Southampton, England | 40 | 100 | Y | Y | 2001 | [49] | |
| Huazhong University of Science and Technology, China; | 41 | 100 | Y | Y | 2014 | [51] | |
| Fudan University, China | 25 | 59 | Y | Y | 2008 | [50] | |
| 150 | - | Y | Y | 2015 | [52] | ||
| MZI | Huazhong University of Science and Technology, China | 1.01 | 38 | Y | Y | 2008 | [59] |
| Beihang University, China | 20 | 206 | Y | N | 2009 | [61] | |
| Tianjin University, China | 50 | ±50 | Y | N | 2008 | [55] | |
| 2.25 | ±20 | Y | N | 2015 | [64] | ||
| Southeast University, China | 10 | - | Y | N | 2013 | [146] | |
| Beijing Jiaotong University, China | 2 | 75 | Y | N | 2015 | [65] | |
| Jinan University, China | 320 | 31 | 9 M | Y | 2014 | [34] | |
| MI | Beijing University of Posts and Telecommunications, China | 4.012 | ±51 | Y | N | 2011 | [70] |
| Sagnac + MZI | Rand Afrikaans University, South Africa | 0.2 | 5 | Y | N | 1998 | [73] |
| Sagnac + MI | University of Pretoria, South Africa | 0.2 | ±4 | Y | N | 1997 | [77] |
| Military University of Technology, Poland | 6 | 40 | Y | N | 2007 | [78] | |
| Φ-OTDR | Texas A&M University, USA | 12 | 1000 | N | Y | 2005 | [87] |
| 12 | 200 | N | Y | 2005 | [88] | ||
| 19 | 200 | N | Y | 2007 | [89] | ||
| University of Ottawa, Canada | 1.2 | 5 | 1 k | Y | 2010 | [90] | |
| 0.2 | 1 | ~2.25 k | Y | 2011 | [91] | ||
| 1 | 0.5 | 8 k | Y | 2012 | [102] | ||
| Chongqing University, China | 1 | ~3 | N | Y | 2013 | [104] | |
| Faculdade de Ciencias da Universidade do Porto, Portugal | 1.25 | 5 | 39.5 k | Y | 2013 | [92] | |
| 125 | 10 | 250 | Y | 2014 | [98] | ||
| 125 | 10 | 380 | Y | 2015 | [99] | ||
| University of Electronic Science and Technology of China, China | 131.5 | 8 | 375 | Y | 2014 | [100] | |
| 175 | 25 | Y | Y | 2014 | [101] | ||
| 2.7 | 3.7 | ∼18 k | Y | 2015 | [107] | ||
| University of Ottawa, Canada; Shandong University, China | 0.68 | 1 | 0.6 M | Y | 2014 | [93] | |
| University of Shanghai for Science and Technology, China | 44 | 5 | N | Y | 2014 | [147] | |
| Nanjing University, China | 24.61 | 10 | Y | Y | 2015 | [108] | |
| 9 | 2 | 1 K | Y | 2015 | [109] | ||
| POTDR | University of Ottawa, Canada | 1 | 10 | 5 k | Y | 2008 | [112] |
| University of Mons, Belgium | ~0.47 | 5 | N | N | 2012 | [113] | |
| Nanjing University, China | 4 | 10 | 610 | N | 2013 | [114] | |
| 7 | 10 | Y | Y | 2013 | [118] | ||
| 10 | 10 | Y | N | 2015 | [116] | ||
| BOTDA | Lehigh University, USA; Beihang University, China | 0.168 | 0.625 | Y | Y | 2011 | [121] |
| Tel-Aviv University, Israel | 0.085 | 1.5 | Y | Y | 2011 | [122] | |
| 0.1 | 1.3 | Y | Y | 2012 | [124] | ||
| Harbin Institute of Technology, China | 0.05 | 0.2 | 50 | Y | 2013 | [125] | |
| BOCDA | The University of Tokyo, Japan | 0.02 | 0.1 | 200 | Y | 2007 | [128] |
| Chung-Ang University, Korea; The University of Tokyo, Japan | 0.1 | 0.8 | 1.3 | Y | 2011 | [129] | |
| OFDR | Chongqing University, China | 0.017 | 0.1 | 32 | Y | 2012 | [135] |
| Tianjin University, China | 12 | 5 | 2 k | Y | 2012 | [132] | |
| 40 | 6.7 | Y | Y | 2016 | [138] | ||
| Tel-Aviv University, Israel | 10 | 40 | Y | Y | 2014 | [136] | |
| Shanghai Jiao Tong University, China | 40 | 3.5 | 600 | Y | 2015 | [139] | |
| Φ-OTDR + MZI | Chongqing University, China; University of Ottawa, Canada | 1.064 | 5 | 3 M | N | 2013 | [140] |
| 1.150 | 5 | 6.3 M | N | 2013 | [141] | ||
| University of Southampton, Southampton, UK | 1 | 2 | 500–5 k | Y | 2013 | [145] | |
| Tian Jin University, China | 2.5 | 20 | 50 M | N | 2015 | [143] | |
| Φ-OTDR + MI | Chinese Academy of Sciences, Beijing, China | 10 | 6 | Y | N | 2015 | [142] |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Jin, B.; Bai, Q.; Wang, Y.; Wang, D.; Wang, Y. Distributed Fiber-Optic Sensors for Vibration Detection. Sensors 2016, 16, 1164. https://doi.org/10.3390/s16081164
Liu X, Jin B, Bai Q, Wang Y, Wang D, Wang Y. Distributed Fiber-Optic Sensors for Vibration Detection. Sensors. 2016; 16(8):1164. https://doi.org/10.3390/s16081164
Chicago/Turabian StyleLiu, Xin, Baoquan Jin, Qing Bai, Yu Wang, Dong Wang, and Yuncai Wang. 2016. "Distributed Fiber-Optic Sensors for Vibration Detection" Sensors 16, no. 8: 1164. https://doi.org/10.3390/s16081164
APA StyleLiu, X., Jin, B., Bai, Q., Wang, Y., Wang, D., & Wang, Y. (2016). Distributed Fiber-Optic Sensors for Vibration Detection. Sensors, 16(8), 1164. https://doi.org/10.3390/s16081164