
Design of a Mobile Low-Cost Sensor Network Using Urban Buses for Real-Time Ubiquitous Noise Monitoring





Abstract
:1. Introduction
2. State of the Art of Dynamic Acoustic Urban Sensing
2.1. Static Acoustic Urban Sensing
2.2. Mobile Acoustic Urban Sensing
2.3. Participative Urban Sensing
2.4. Hybrid Urban Sensing
3. Mobile Measure Platforms and Their Connectivity
3.1. Hardware Platforms
- Cortex-A: basically used by embedded systems that need a high level of operational system computing capabilities as low-cost handsets to smartphones or tablets.
- Cortex-R: this series is the smallest ARM processor and is commonly used in automotive, networking and data storage applications.
- Cortex-M: being the most popular of the ARM family, this series is being used for all types of low-cost and low consumption applications, from real-time signal processing to industrial control.
- mbed: this is a platform that provides free libraries, hardware designs and online tools for rapid prototyping of 32-bit ARM-based microcontroller products. This framework includes a standards-based C/C++ SDK, a microcontroller HDK and supported development boards, an online compiler and online developer collaboration tools [71,72].
- MATLAB: MathWorks offers the Embedded Coder Support Package for the Freescale FRDM-KL25Z Board to run the Simulink® model on an FRDM-KL25Z board. The support package includes a library of Simulink blocks for configuring and accessing Freescale FRDM-KL25Z peripherals and communication interfaces. Then, it is quite simple to build applications using the block-based interface of Simulink®, which generates also the code for the Freescale FRDM-KL25Z board and runs the generated code on the board [73].
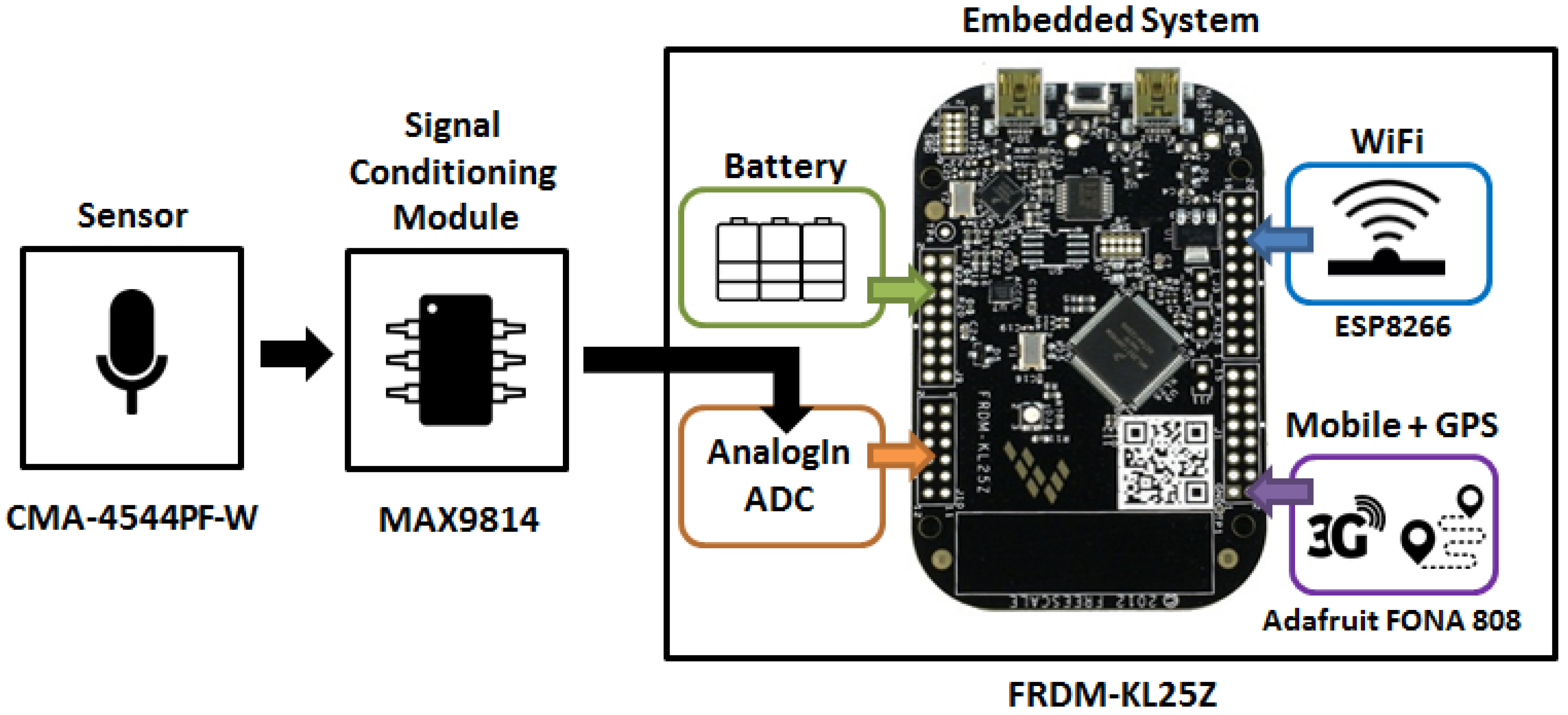
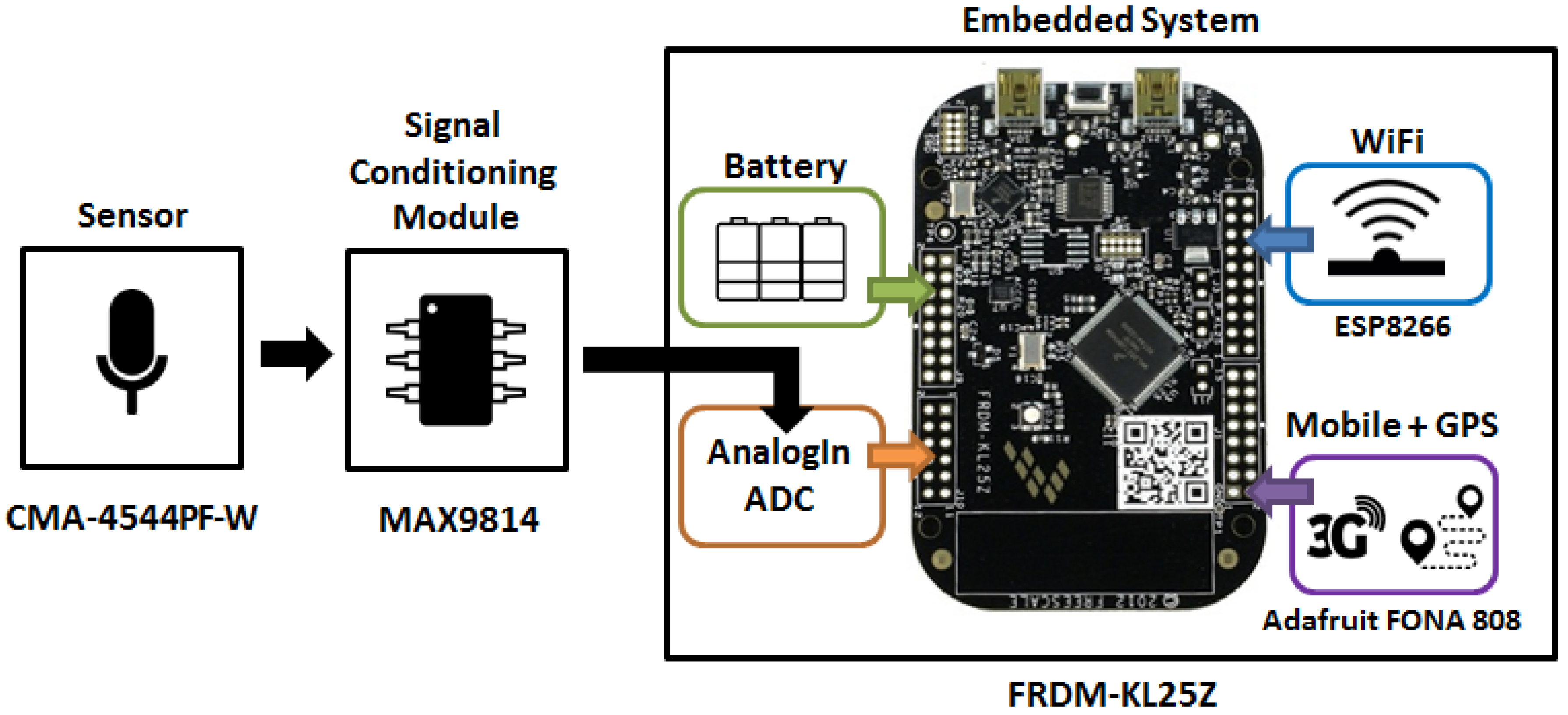
- Signal conditioning module, in charge of accommodating the analog signal captured by the microphone to the next block; that is, the Analog to Digital Converter (ADC). This conditioning stage adjusts the analog signal levels of voltage and current to the ADC input. Besides, this module also matches the output impedance of the microphone to the input impedance of the ADC.
- Analog to digital audio converter. Obviously, this block converts the analog signal captured by the microphone to a digital signal that can be later processed. To select the ADC, the main characteristics that should be analyzed are: the number of bits used in the conversion (as many bits are used, a bigger resolution will be obtained in the conversion, but a longer time of conversion), the speed of the conversion, distortion performance, sensitivity and errors in the conversion. The ADC can be implemented inside the System on Chip (SoC) on which the embedded system is based or also it can be placed externally, and it is controlled via an I2C or SPI bus.
- CODEC block: Although this block is optional, it can be used to reduce the number of bits needed to save the digitalized signal in the memory of the embedded system to its post-process. A huge variety of codecs can be used, but all of them are focused on compressing the audio stream with the maximum fidelity and quality.
- Memory: after the CODEC, data are dumped into a memory block from which the data can be retrieved for further processing by the application program.
- Directivity: as it is desired to monitor the noise generated in all directions, the microphone must be omnidirectional; that is, it must be able to capture noise from all directions, and then, it must be omnidirectional.
- Sensitivity: understood as the ratio of the analog output voltage or digital output value to the input noise pressure. This value, combined with the signal to noise ratio, is quite important to obtain a high quality monitoring system in order to record the sound with the maximum fidelity.
- Signal to noise ratio: it specifies the ratio of a reference signal to the noise level of the microphone output. Measured in decibels, it is the difference between the noise level and a standard 1-kHz, 94-dB SPL (Sound Pressure Level) reference signal. This specification is typically specified as an A-weighted value (dBA), which means that it includes a correction factor that corresponds to the human ear’s sensitivity to sound at different frequencies. Combined with the sensitivity, these factors will be important to be able to discriminate background noises during the monitoring of the acoustic environment.
- Operating frequency: this is the range of frequencies that can be collected by the microphone. As the application under design is to control the noise in an urban scenario and analyze its impact on humans, the frequency range should be from 20 to 20 kHz; that is, the dynamic range in with human ears work.
3.2. Connectivity of the Platforms
- WiFi ESP8266: this is a very low price and consumption WiFi module that implements a complete TCP/IP protocol stack. It provides a set of instructions and functionalities that make it very easy to control and start to work without any complicated configuration.
- Adafruit FONA 808: this is and all-in-one mobile communication interface plus a GPS module. Although it works with a 2 G SIM card, it is quite enough to allow remote control and data download, reducing the price of the whole system. It communicates with the controller through a serial port, making the deployment of applications easy and fast.
4. Mobile Bus Acoustic Measurement
4.1. Signal Processing Challenges
4.1.1. Reliability of the Measure
4.1.2. Mobile Vehicle Noise Contribution
4.1.3. Classification of Road Traffic Vehicles
4.2. Challenges in Terms of Noise Mapping
4.2.1. Mobile Trajectories Design and Data Collection
4.2.2. Noise Mapping Real-Time Update
4.3. Challenges in Terms of Hardware Platform Selection
- Low price: the main goal of the application being the collection of data about the noise in the city to generate a dynamic noise map, the more sensors can be placed, the better. Then, the use of a inexpensive hardware platforms is recommended, which can be easily deployed, and this should include all of the elements needed to achieve the objectives of the applications.
- Non-intrusive: that is, as the platform will be deployed on a public means of transport, such as urban buses, it is recommended not to require any special restrictions regarding its installation. Then, it must be auto-powered, small in size and easily integrated on the buses. Moreover, during the performance of the system, it has to have no interference with the electronic and communication systems of the vehicle.
- Low energy consumption: as the hardware platform cannot be connected to the energy system of the vehicle, it must have a power system itself. Then, the complete system should be low consumption and implemented with any software functionality able to control the waste of energy during the operation, for example disabling some subsystems if they are not needed.
- Communication interfaces: one of the main tasks of the platform is to send the recorded data to a central system. Then, different communication interfaces can be deployed on board, according to the characteristics of the environment. That is, if a WiFi network is available, then a free link can be established with the server, but in the case of being out of the WiFi coverage, a mobile communication link should be available to allow the data upload and also the remote control of the platform in case a remote reconfiguration or maintenance is necessary. At the same time, the platform must perform a geolocation interface in order to associate noise-data to location references.
- Communications management sub-system: as the platform needs different interfaces, a management software is needed to control the communications to the server. This functionality will be in charge of determining which interface can be used in each situation in order to save energy and to save money. For example, when free WiFi is available, this functionality will upload all of the saved data to the server automatically.
- Storage capacity: as the platform must save data about the noise in different locations, it must be able to save as much information as possible in order to keep it in memory until being in a free WiFi coverage area to send it to the server or just before overloading of the memory, through a mobile link.
- Real-time data processing capability: the processor provided on the embedded system must be able to process the noise captured by the microphone in real time to obtain the noise frequency and level. Then, this information is saved on the memory joined to the location provided by the GPS. Later, these data are sent to the central server. During this signal processing stage, the processor also must be able to discriminate the noise of the environment from the noise generated by the vehicle in which the hardware will be deployed. Moreover, the resolution of the processing must be enough to allow the classification and characterization of the traffic vehicles.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ADC | Analog to Digital Converter |
| ANED | Anomalous Noise Event Detection |
| ARM | Advanced RISC Machine |
| ASIC | Application-Specific Integrated Circuits |
| CPU | Central Processing Unit |
| EC | European Commission |
| END | Environmental Noise Directive |
| EU | European Union |
| DSP | Digital Signal Processor |
| FLD | Fisher’s Linear Discriminant |
| FPGA | Field Programmable Gate Array |
| GPS | Global Positioning System |
| GTCC | Gammatone Cepstrum Coefficients |
| HMM | Hidden Markov Models |
| ICT | Information and Communication Technology |
| KNN | K-Nearest Neighbor |
| LMS | Least Mean Squares Filter |
| MFCC | Mel-Frequency Cepstrum Coefficients |
| MSU | Mobile Sensing Unit |
| PLC | Programmable Logic Device |
| RAM | Random Access Memory |
| RLS | Recursive Least Squares Filter |
| SOA | Service-Oriented Architecture |
| SoC | System on Chip |
| SOM | Self-Organizing Maps |
| SPL | reference signal |
| SVM | Support Vector Machine |
| WASN | Wireless Acoustic Sensor Network |
References and Notes
- World Demographics Profile 2012. Index Mundi. Available online: http://www.indexmundi.com/world/demographics_profile.html (accessed on 22 May 2016).
- World Population 2015. United Nations, Department of Economic and Social Affairs, Population Division. Available online: https://esa.un.org/unpd/wpp/Publications/Files/World_Population_2015_Wallchart.pdf (accessed on 13 September 2016).
- Bouskela, M.; Casseb, M.; Bassi, S.; De Luca, C.; Facchina, M. La Ruta Hacia las SmartCities: Migrando de una Gestión Tradicional a una Ciudad Inteligente; Banco Interamericano de Desarrollo (BID): Washington, DC, USA, 2016. [Google Scholar]
- Morandi, C.; Rolando, A.; Di Vita, S. From Smart City to Smart Region, Digital Services for an Internet of Places; Politecnico de Milano; SpringerBriefs in Applied Sciences and Technology: Zurich, Switzerland, 2016. [Google Scholar]
- Smart City Expo World Congress, Report 2015. Fira de Barcelona. Available online: http://media.firabcn.es/content/S078016/docs/Report_SCWC2015.pdf (accessed on 14 September 2016).
- The European Environment, State and Outlook 2010 (Sythesis). European Environment Agency, 2010. Available online: http://www.eea.europa.eu/soer/synthesis/synthesis (accessed on 27 August 2016).
- Ripoll, A. State of the Art of Noise Mapping in Europe; Internal Report; Universitat Autònoma de Barcelona, European Environment Agency: Copenhagen, Denmark, 2005. [Google Scholar]
- Environmental Noise Directive (END). 2002/49/EC of the European parliament and the Council of 25 June 2002 relating to the assessment and management of environmental noise. Off. J. Eur. Communities L 2002, 189, 2002. [Google Scholar]
- Common Noise Assessment Methods in Europe (CNOSSOS-EU) for strategic noise mapping following Environmental Noise Directive 2002/49/EC, European Commission, Joint Research Centre—Institute for Health and Consumer Protection, 2012.
- Alberts, W.; Faber, N.; Roebben, M. Road Traffic Noise Exposure in Europe in 2012 based on END data. In Proceedings of the INTERNOISE, Hamburg, Germany, 21–24 August 2016; pp. 1236–1247.
- Licitra, G.; Palazzuoli, D.; Ascari, E. END Noise Mapping for a Sufficiently Accurate People Exposure Estimation in Epidemiological Studies. In Proceedings of the INTERNOISE, Hamburg, Germany, 21–24 August 2016; pp. 5687–5698.
- Burden of Disease from Environmental Noise. Quantification of Healthy Life Years Lost in Europe. World Health Organization, Regional Office for Europe—European Comission, 2011. Available online: http://www.euro.who.int/__data/assets/pdf_file/0008/136466/e94888.pdf (accessed on 12 September 2016).
- Murphy, E.; King, E.A. Environmental Noise Pollution, Noise Mapping, Public Health and Policy; Elsevier: San Diego, CA, USA, 2014. [Google Scholar]
- Commission Directive (EU) 2015/996 Establishing Common Noise Assessment Methods According to Directive 2002/49/EC of the European Parliament and of the Council. Available online: http://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A32015L0996 (accessed on 5 December 2016).
- FONOMOC, Subgroup of Working Group Noise in EUROCITIES. Available online: https://workinggroupnoise.com/fonomoc/ (accessed on 27 August 2016).
- EUROCITIES, the Network of Major European Cities. Available online: www.eurocities.eu (accessed on 27 August 2016).
- Wolfert, H. Towards New Less Noisy Mobility Patterns in Cities. In Proceedings of the Internoise, Melbourne, Australia, 16–19 November 2014.
- Harmonica, An Innovative Noise-pollution Index and a Platform to Inform and to Assist Decision-Making. Available online: http://www.harmonica-project.eu/en (accessed on 27 August 2016).
- Mietlicki, C.; Mietlicki, F.; Ribeiro, C.; Gaudibert, P.; Vincent, B. The HARMONICA Project, New Tools to Assess Environmental Noise and Better Inform the Public. In Proceedings of the Forum Acusticum, Krákow, Poland, 7–12 September 2014.
- DYNAMAP, Dynamic Acoustic Mapping—Development of Low Cost Sensor Networks for Real Time Noise Mapping. LIFE+. Available online: http://www.life-dynamap.eu/ (accessed on 27 August 2016).
- Sevillano, X.; Socoró, J.C.; Alías, F.; Bellucci, P.; Peruzzi, L.; Radadelli, S.; Coppi, P.; Nencini, L.; Cerniglia, A.; Bisceglie, A.; et al. DYNAMAP—Development of Low Cost Sensors Networks for Real Time Noise Mapping. Noise Mapp. 2016, 3, 172–189. [Google Scholar] [CrossRef]
- Zambon, G.; Angelini, F.; Salvi, D.; Zanaboni, W.; Smiraglia, M. Traffic Noise Monitoring in the City of Milan: Construction of a Representative Statistical Collection of Acoustic Trends. In Proceedings of the 22nd International Congress on Sound and Vibration, Florence, Italy, 12–16 July 2015.
- Progetto SENSEable PISA. Sensing The City. Description of the Project. Available online: http://senseable.it/ (accessed on 10 September 2016). (In Italian)
- Nencini, L.; De Rosa, P.; Ascari, E.; Vinci, B.; Alexeeva, N. SENSEable Pisa—A Wireless Sensor Network for Real-Time Noise Mapping. In Proceedings of the EURONOISE, Prague, Czech Republic, 10–13 June 2012.
- Superblocks Project, a Sustainable Strategy for Regenerating the City. Ajuntament de Barcelona. Available online: http://smartcity.bcn.cat/en/superblocks.html (accessed on 14 September 2016).
- Urban Mobility Plan of Barcelona, PMU 2013–2018. Ajuntament de Barcelona. 2014. Available online: http://www.bcnecologia.net/sites/default/files/proyectos/pmu_angles.pdf (accessed on 12 September 2016).
- Alves, S.; Scheuren, J.; Altreuther, B. Review of recent EU funded research projects from the perspective of urban sound planning: Do the results cope with the needs of Europe’s noise policy? Noise Mapp. 2016, 3, 86–106. [Google Scholar] [CrossRef]
- Aletta, F.; Kang, J. Soundscape approach integrating noise mapping techniques: A case study in Brighton, UK. Noise Mapp. 2015, 2, 1–12. [Google Scholar] [CrossRef]
- Alves, S.; Estévez-Mauriz, L.; Aletta, F.; Echevarria-Sanchez, G.M.; Puyana Romero, V. Towards the integration of urban sound planning in urban development processes: The study of four test sites within the SONORUS project. Noise Mapp. 2015, 2, 57–85. [Google Scholar]
- Basten, T.; Wessels, P. An Overview of Sensor Networks for Environmental Noise Monitoring. In Proceedings of the 21st International Congress on Sound and Vibration, Beijing, China, 13–17 July 2014.
- Wang, C.; Chen, G.; Dong, R.; Wang, H. Traffic Noise Monitoring and Simulation Research in Xiamien City based on the Environmental Internet of Things. Int. J. Sustain. Dev. World Ecol. 2013, 20, 248–253. [Google Scholar] [CrossRef]
- Filiponni, L.; Santini, S.; Vitaletti, A. Data Collection in Wireless Sensor Networks for Noise Pollution Monitoring. In Proceedings of the 4th IEEE International Conference on Distributed Computing in Sensor Systems, Santorini Island, Greece, 11–14 June 2008.
- Mietlicki, C.; Mietlicki, F.; Sineau, M. An Innovative Approach for Long-term Environmental Noise Measurement: RUMEUR Network. In Proceedings of the Euronoise 2015, Maastrich, The Netherlands, 31 May–3 June 2015; pp. 2309–2314.
- Paulo, J.P.; Fazenda, P.; Oliveira, T.; Carvalho, C.; Felix, M. Framework to Monitor Sound Events in the City Supported by the Fiware Platform. In Proceedings of the 46° Congreso Español de Acústica, Valencia, Spain, 21–23 October 2015.
- Rawat, P.; Singh, K.D.; Chaouchi, H.; Bonnin, J.M. Wireless Sensor Networks: A Survey on Recent Developments and Potential Synergies. J. Supercomput. 2013, 68, 1–48. [Google Scholar] [CrossRef]
- Heidemann, J.; Li, Y.; Syed, A.; Wills, J.; Ye, W. Underwater Sensor Networking: Research Challenges and Potential Applications. In Proceedings of the IEEE Wireless Communications and Networking Conference, Las Vegas, NV, USA, 3–6 April 2006.
- Werner-Allen, G.; Lorincz, K.; Welsh, M.; Marcillo, O.; Johnson, J.; Ruiz, M.; Lees, J. Deploying a Wireless Sensor Network on an Active Volcano. IEEE Internet Comput. 2006, 10, 18–25. [Google Scholar] [CrossRef]
- Simon, G.; Maróti, M.; Lédeczi, A.; Balogh, G.; Kusy, B.; Nádas, A.; Pap, G.; Sallai, J.; Frampton, K. Sensor Network-based Countersniper System. In Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004; ACM: New York, NY, USA, 2004; pp. 1–12. [Google Scholar]
- Santini, S.; Ostermaier, B.; Adelmant, R. On the Use of Sensor Nodes and Mobile Phones for the Assessment of Noise Pollution Levels in Urban Environments. In Proceedings of the Sixth International Conference on Networked Sensing Systems (INSS), Pittsburgh, PA, USA, 17–19 June 2009.
- Bertrand, A.; Doclo, S.; Gannot, S.; Ono, N.; van Waterschoot, T. Special Issue on Wireless Acoustic Sensor Networks and ad hoc Microphone Arrays. Signal Process. 2015, 107, 1–3. [Google Scholar] [CrossRef]
- Botteldooren, D.; De Coensel, B.; Oldoni, D.; Van Rentherghem, T.; Dauwe, S. Sound Monitoring Networks New Style. In Proceedings of the Acoustics 2011, Gold Coast, Australia, 2–4 November 2011.
- Bell, M.C.; Galatioto, F. Novel Wireless Pervasive Sensor Network to Improve the Understanding of Noise in Street Canyons. Appl. Acoust. 2013, 74, 169–180. [Google Scholar] [CrossRef]
- Domínguez, F.; Dauwe, S.; The Cuong, N.; Cariolaro, D.; Touhafi, A.; Dhoedt, B.; Steenhaut, K. Towards an Environmental Measurement Cloud: Delivering Pollution Awareness to the Public. Int. J. Distrib. Sens. Netw. 2014. [Google Scholar] [CrossRef]
- Nencini, L. DYNAMAP Monitoring Network Hardware Development. In Proceedings of the 22nd International Congress on Sound and Vibration, Florence, Italy, 12–16 July 2015.
- Can, A.; Dekoninck, L.; Botteldooren, D. Measurement network for urban noise assessment: Comparison of mobile measurements and spatial interpolation approaches. Appl. Acoust. 2014, 83, 32–39. [Google Scholar] [CrossRef]
- Shepard, D. A two-dimensional interpolation function for irregularity-spaced data. In Proceedings of the 23rd National Conference of the ACM, New York, NY, USA, 27–29 August 1968; pp. 517–524.
- Krige, D.G. A Statistical Approach to Some Mine Valuations and Allied Problems at the Witwatersrand. Master’s Thesis, University of Witwatersrand, Johannesburg, South Africa, 1951. [Google Scholar]
- Hong, P.D.; Lee, Y.W. A Grid Portal for Monitoring of the Urban Environment Using the MSU. In Proceedings of the International Conference on Advanced Communication Technology, Phoenix Park, Korea, 15–18 February 2009.
- Zhao, S.; Nguyen, T.N.T.; Jones, D.L. Large Region Acoustic Source Mapping using Movable Arrays. In Proceedings of the International Conference on Acoustic, Speech and Signal Processing, Brisbane, Australia, 19–24 April 2015; pp. 2589–2593.
- Dekonick, L.; Botteldoren, D.; int Panis, L. Sound Sensor Network Based Assessment of Traffic, Noise and Air Pollution. In Proceedings of the EURONOISE, Maastrich, The Netherlands, 31 May–3 June 2015; pp. 2321–2326.
- Can, A.; Van Renterghem, T.; Botteldooren, D. Exploring the Use of Mobile Sensors for Noise and Black Carbon Measurements in an Urban Environment. In Proceedings of the Acoustics, Nantes, France, 23–27 April 2012.
- Dekoninck, L.; Botteldooren, D.; Int Panis, L.; Hankey, S.; Jain, G.; Marshall, J. Applicability of a Noise-based Model to Estimate in-Traffic Exposure to Black Carbon and Particle Number Concentrations in Different Cultures. Environ. Int. 2015, 74, 89–98. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fiser, M.; Pokorny, F.B.; Graf, F. Acoustic Geo-sensing Using Sequential Monte Carlo Filtering. In Proceedings of the 6th Congress of the Alps Adria Acoustics Association, Graz, Austria, 16–17 October 2014.
- Mostashari, A.; Arnold, F.; Maurer, M. Citizens as Sensors: The Cognitive City Paradigm. In Proceedings of the 8th International Conference & Expo on Emerging Technologies for a Smarter World, Hauppauge, NY, USA, 2–3 November 2011.
- Guillaume, G.; Can, A.; Petit, G.; Fortin, N.; Palominos, S.; Gauvreau, B.; Bocher, E.; Picaut, J. Noise Mapping Based on Participative Measurements. Noise Mapp. 2016, 3, 140–156. [Google Scholar] [CrossRef] [Green Version]
- Aspuru, I.; García, I.; Herranz, K.; Santander, A. CITI-SENSE: Methods and Tools for Empowering Citizens to Observe Acoustic Comfort in Outdoor Public Spaces. Noise Mapp. 2016, 3, 37–48. [Google Scholar] [CrossRef]
- Aspuru, I.; García, I.; Herranz-Pascual, K.; Santander, A. Empowering People on the Assessment of the Acoustic Confort of Urban Places: CITI-SENSE Project. In Proceedings of the INTERNOISE, Hamburg, Germany, 21–24 August 2016.
- Kanjo, E. NoiseSPY: A Real-Time Mobile Phone Platform for Urban Noise Monitoring and Mapping. Mob. Netw. Appl. 2010, 15, 562–574. [Google Scholar] [CrossRef]
- Maisonneuve, N.; Stevens, M.; Ochab, B. Participatory noise pollution monitoring using mobile phones. Inf. Polity 2010, 15, 51–71. [Google Scholar]
- Schweizer, I.; Bartl, R.; Schulz, A.; Probst, F.; Muhlhauser, M. NoiseMap—Real-time Participatory Noise Maps. In Proceedings of the 2nd International Workshop on Sensing Applications on Mobile Phones, Seattle, WA, USA, 1–4 November 2011.
- Hu, M.; Che, W.; Zhang, Q.; Luo, Q.; Lin, H. A Multi-Stage Method for Connecting Participatory Sensing and Noise Simulations. Sensors 2015, 15, 2265–2282. [Google Scholar] [CrossRef] [PubMed]
- Ruge, L.; Altakrouri, B.; Schrader, A. SoundOfTheCity—Continuous Noise Monitoring for a Healthy City. In Proceedings of the 5th International Workshop on Smart Environments and Ambient Intelligence, San Diego, CA, USA, 18–22 March 2013; pp. 670–675.
- Zheng, Y.; Liu, T.; Wang, Y.; Zhu, Y.; Liu, Y.; Chang, E. Diagnosing New York City’s Noises with Ubiquitous Data. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014; pp. 715–725.
- Aiello, L.M.; Schifanella, R.; Quercia, D.; Aletta, F. Chatty Maps: Constructing sound maps of urban areas from social media data. R. Soc. Open Sci. 2016, 3, 150690. [Google Scholar] [CrossRef] [PubMed]
- Loreto, V.; Haklay, M.; Hotho, A.; Sevedio, V.; Stumme, G.; Theunis, J.; Tria, F. Participatory Sensing, Opinions and Collective Awareness. In Collection Understanding Complex Systems; Springer: Cham, Switzerland, 2017. [Google Scholar]
- D’Hondt, E.; Stevens, M.; Jacobs, A. Participatory noise mapping works! An evaluation of participatory sensing as an alternative to standard techniques for environmental monitoring. Pervasive Mob. Comput. 2013, 9, 681–694. [Google Scholar] [CrossRef]
- De Coensel, B.; Botteldooren, D. Smart Sound Monitoring for Sound Event Detection and Characterisation. In Proceedings of the INTERNOISE, Melbourne, Australia, 16–19 November 2014.
- De Coensel, B.; Sun, K.; Wei, W.; Van Renterghem, T.; Sineau, M.; Ribeiro, C.; Can, A.; Aumond, P.; Lavandier, C.; Botteldooren, D. Dynamic Noise Mapping based on Fixed and Mobile Sound Measurements. In Proceedings of the Euronoise, Maastrich, The Netherlands, 31 May–3 June 2015; pp. 2339–2344.
- Malinowski, A.; Yu, H. Comparison of Embedded System Design for Industrial Applications. IEEE Trans. Ind. Inf. 2011, 7, 244–254. [Google Scholar] [CrossRef]
- Which ARM Cortex Core Is Right for Your Application: A, R or M? Available online: http://www.silabs.com (accessed on 26 May 2016).
- Macías, M.M.; Agudo, J.E.; Orellana, C.J.G.; Velasco, H.M.G.; Manso, A.G. The “mbed” platform for teaching electronics applied to product design. In Proceedings of the Tecnologias Aplicadas a la Ensenanza de la Electronica (Technologies Applied to Electronics Teaching) (TAEE), Bilbao, Spain, 11–13 June 2014; pp. 1–6.
- Toulson, R.; Wilmshurst, T. Fast and Effective Embedded Systems Design Applying the ARM Mbed; Newnes: Oxford, UK, 2012. [Google Scholar]
- Getting Started with Embedded Coder Support Package for Freescale FRDM-KL25Z Board. Available online: http://es.mathworks.com/ (accessed on 26 May 2016).
- Wu, X.; Obeng, M.; Wang, J.; Kulas, D. A survey of techniques to add audio module to embedded systems. In Proceedings of the IEEE Southeastcon, Orlando, FL, USA, 15–18 March 2012; pp. 1–5.
- Adafruit. Available online: https://www.adafruit.com/products/1713 (accessed on 31 May 2016).
- Magdaleno, E.; Rodríguez, M.; Pérez, F.; Hernández, D.; García, E.A. FPGA Embedded Web Server for Remote Monitoring and Control of Smart Sensors Networks. Sensors 2014, 14, 416–430. [Google Scholar] [CrossRef] [PubMed]
- Ozer, E.; Feng, M.Q.; Feng, D. Citizen Sensors for SHM: Towards a Crowdsourcing Platform. Sensors 2015, 15, 14591–14614. [Google Scholar] [CrossRef] [PubMed]
- Moreno, A.; Angulo, I.; Perallos, A.; Landaluce, H.; Zuazola, I.J.G.; Azpilicueta, L.; Astrain, J.J.; Falcone, F.; Villadangos, J. IVAN: Intelligent Van for the Distribution of Pharmaceutical Drugs. Sensors 2012, 12, 6587–6609. [Google Scholar] [CrossRef] [PubMed]
- Mitchell, S.; Wagener, W. The Connected Bus: Connected and Sustainable Mobility Pilot. A Partnership between the City and County of San Francisco and Cisco. Pilot Results; Connected Urban Development, 2009. Available online: http://www.cisco.com/c/dam/en_us/about/ac79/docs/cud/The_Connected_Bus_Pilot.pdf (accessed on 5 December 2016).
- Central Policy Unit, The Government of the Hong Kong Special Administrative Region. Research Report on Smart City. September 2015. Available online: http://www.cpu.gov.hk/doc/en/research_reports/CPU%20research%20report%20-%20Smart%20City(en).pdf (accessed on 5 December 2016). [Google Scholar]
- Ntalampiras, S.; Potamitis, I.; Fakotakis, N. On Acoustic Surveillance of Hazardous Situations. In Proceedings of the International Conference on Acoustic, Speech and Signal Processing, Taipei, Taiwan, 19–24 April 2009; pp. 165–168.
- Schröder, J.; Goetze, S.; Grützmacher, V.; Anemüller, J. Automatic Acoustic Siren Detection in Traffic Noise by Part-Based Models. In Proceedings of the International Conference on Acoustic, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 493–497.
- Foggia, P.; Petrov, N.; Saggese, A.; Strisciuglio, N.; Vento, M. Audio Surveillance of Roads: A System for Detecting Anomalous Sounds. Trans. Intell. Transp. Syst. 2016, 17, 279–288. [Google Scholar] [CrossRef]
- Oldoni, D.; De Coensel, B.; Bockstael, A.; Boes, M.; De Baets, B.; Botteldooren, D. The Acoustic Summary as a Tool for Representing Urban Sound Environments. Landsc. Urban Plan. 2015, 144, 34–48. [Google Scholar] [CrossRef]
- Socoró, J.C.; Ribera, G.; Sevillano, X.; Alías, F. Development of an Anomalous Noise Event Detection Algorithm for Dynamic Road Traffic Noise Mapping. In Proceedings of the 22nd International Congress on Sound and Vibration (ICSV22), Florence, Italy, 12–16 July 2015.
- Socoró, J.C.; Albiol, X.; Sevillano, X.; Alías, F. Analysis and Automatic Detection of Anomalous Noise Events in Real Recordings of Road Traffic Noise for the LIFE DYNAMAP Project. In Proceedings of the INTERNOISE, Hamburg, Germany, 21–24 August 2016; pp. 6370–6379.
- Valero, X.; Alías, F. Gammatone Wavelet Features for Sound Classification in Surveillance Applications. In Proceedings of the 20th European Signal Processing Conference, Bucharest, Romania, 27–31 August 2012; pp. 1658–1662.
- Creixell, E.; Haddad, K.; Song, W.; Chauhan, S.; Valero, X. A Method for Recognition of Coexisting Environmental Sound Sources based on the Fisher’s Linear Discriminant Classifier. In Proceedings of the INTERNOISE, Innsbruck, Austria, 15–18 September 2013.
- Benetos, E.; Lafay, G.; Lagrange, M.; Plumbley, M. Detection of Overlapping Acoustic Events using a Temporally-Constrained Probabilistic Model. In Proceedings of the International Conference on Acoustic, Speech and Signal Processing, Shanghai, China, 20–25 March 2016; pp. 6450–6454.
- Mesaros, A.; Heittola, T.; Virtanen, T. Metrics for Poliphonic Sound Event Detection. Appl. Sci. 2016, 6, 162. [Google Scholar] [CrossRef]
- Heittola, T.; Mesaros, A.; Virtanen, T.; Gabbouj, M. Supervised Model Training for Overlapping Sound Events based on Unsupervised Source Separation. In Proceedings of the 38th International Conference on Acoustics, Speech, and Signal Processing (ICASSP 2013), Vancouver, BC, Canada, 26–31 May 2013; pp. 8677–8681.
- Mesaros, A.; Dikmen, O.; Heittola, T.; Virtanen, T. Sound Event Detection in Real Life Recordings Using Coupled Matrix Factorization of Spectral Representations and Class Activity Annotations. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brisbane, Australia, 19–24 April 2015; pp. 151–155.
- Espi, M.; Fujimoto, M.; Kinoshita, K.; Nakatani, T. Exploiting Spectro-temporal Locality in Deep Learning Based Acoustic Event Eetection. EURASIP J. Audio Speech Music Process. 2015. [Google Scholar] [CrossRef]
- Ntalampiras, S.; Potamitis, I.; Fakotakis, N. Automatic Recognition of Urban Environmental Sounds Events. In Proceedings of the EURASIP—Workshop on Cognitive Information Processing, Santorini, Greece, 9–10 June 2008; pp. 110–113.
- Valero, X.; Alías, F. Automatic Classification of Road Vehicles Considering their Pass-by Acoustic Signature. In Proceedings of the International Conference on Acoustics (ICA), Montréal, QC, Canada, 2–7 June 2013.
- Geréb, G. Real-time updating of noise maps by source-selective noise monitoring. Noise Control Eng. J. 2013, 61, 228–239. [Google Scholar] [CrossRef]
- Theodorou, T.; Mporas, I.; Fakotakis, N. Automatic Sound Recognition of Urban Environment Events; Speech and Computer Vol. 9319 of the series Lecture Notes in Computer Science; Springer: Zurich, Switzerland; pp. 129–136.
- Crocco, M.; Cristani, M.; Trucco, A.; Murino, V. Audio Surveillance: A Systematic Review. ACM Comput. Surv. (CSUR) 2016, 48, 52. [Google Scholar] [CrossRef]
- Garcia, A.; Faus, L.J. Statistical Analysis of Noise Levels in Urban Areas. Appl. Acoust. 1991, 34, 227–247. [Google Scholar] [CrossRef]
- Morillas, J.M.; Escobar, V.G.; Sierra, J.A.; Vilchez-Gomez, R.; Vaquero, J.M.; Carmona, J.T. A Categorization Method Applied to the Study of Urban Road Traffic Noise. J. Acoust. Soc. Am. 2005, 117, 2844–2852. [Google Scholar] [CrossRef] [PubMed]
- Del Río, F.J.C.; Escobar, V.G.; Carmona, J.T.; Vílchez-Gómez, R.; Sierra, J.A.M.; Gozalo, G.R.; Morillas, J.M.B. A Street Categorization Method to Study Urban Noise: The Valladolid (Spain) study. Environ. Eng. Sci. 2011, 28, 811–817. [Google Scholar] [CrossRef]
- Zambon, G.; Benocci, R.; Brambilla, G. Cluster Categorization of Urban Roads to Optimize their Noise Monitoring. Environ. Monit. Assess. 2016, 188, 26. [Google Scholar] [CrossRef] [PubMed]
- Andrzej, C.; Maciej, S. Software for Calculation of Noise Maps Implemented on Supercomputer. Prac. Poligr. 2009, TQ4131, 363–378. [Google Scholar]
- Wei, W.; Botteldooren, D.; Van Renterghem, T. Monitoring Sound Exposure by Real Time Measurement and Dynamic Noise Map. In Proceedings of the Forum Acusticum, Krakow, Poland, 7–12 September 2014.
- Cerniglia, A. State of the Art on Real Time Noise Mapping System and Related Software Development. In Proceedings of the 22nd International Congress on Sound and Vibration, Florence, Italy, 12–16 July 2015.
- Manvell, D.; Ballarin Marcos, L.; Stapelfeldt, H.; Sanz, R. SADMAM—Combining Measurements and Calculations to Map Noise in Madrid. In Proceedings of the INTERNOISE, Prague, Czech Republic, 22–25 August 2004.
- Brambilla, G.; Cerniglia, A.; Verardi, P. New Potential of Long Term Real Time Noise Monitoring Systems. In Proceedings of the EuroNoise, Tampere, Finland, 30 May–1 June 2006.
- Maisonneuve, N.; Stevens, M.L.L.; Niessen, M.; Steels, L. NoiseTube: Measuring and Mapping Noise Pollution with Mobile Phones. In Proceedings of the Information Technologies in Environmental Engineering, Thessaloniki, Greece, 28–29 May 2009.
- Rana, R.; Chou, C.T.; Bulusu, N.; Kanhere, S.; Hu, W. Ear-Phone: A Context-Aware Noise Mapping using Smart Phones. Pervasive Mob. Comput. 2015, 17, 1–22. [Google Scholar] [CrossRef]

{kind=link}
| Embedded System | Processor Core | Price |
|---|---|---|
| The chipKIT™ MX3 | Microchip® PIC32MX320F128H Microcontroller (80-MHz 32-bit MIPS 128 KB Flash, 16 KB SRAM) | 44.99$ |
| STM32VLDiscovery | ARM® Cortex-M3 (24-MHz 32-bit 128 KB Flash memory, 8 KB RAM) | 9.90$ |
| FRDM-KL25Z | ARM® Cortex®-M0+ (48-MHz 32-bit MIPS 128 KB Flash 16 KB SRAM) | 13.25$ |
| BeagleBone Black | Sitara™ ARM® Cortex-A8 (2x PRU 32-bit microcontrollers, 512 MB DDR3 RAM) | 51.15$ |
| Raspberry Pi 3 Model B | 1.2-GHz Quad-Core ARM Cortex-A53 | 37.00$ |
| CYPRESS PSoC® 4 CY8C4245AXI | 32-bit ARM® Cortex™-M0 48-MHz CPU | 24.31$ |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsina-Pagès, R.M.; Hernandez-Jayo, U.; Alías, F.; Angulo, I. Design of a Mobile Low-Cost Sensor Network Using Urban Buses for Real-Time Ubiquitous Noise Monitoring. Sensors 2017, 17, 57. https://doi.org/10.3390/s17010057
Alsina-Pagès RM, Hernandez-Jayo U, Alías F, Angulo I. Design of a Mobile Low-Cost Sensor Network Using Urban Buses for Real-Time Ubiquitous Noise Monitoring. Sensors. 2017; 17(1):57. https://doi.org/10.3390/s17010057
Chicago/Turabian StyleAlsina-Pagès, Rosa Ma, Unai Hernandez-Jayo, Francesc Alías, and Ignacio Angulo. 2017. "Design of a Mobile Low-Cost Sensor Network Using Urban Buses for Real-Time Ubiquitous Noise Monitoring" Sensors 17, no. 1: 57. https://doi.org/10.3390/s17010057
APA StyleAlsina-Pagès, R. M., Hernandez-Jayo, U., Alías, F., & Angulo, I. (2017). Design of a Mobile Low-Cost Sensor Network Using Urban Buses for Real-Time Ubiquitous Noise Monitoring. Sensors, 17(1), 57. https://doi.org/10.3390/s17010057