SFOL Pulse: A High Accuracy DME Pulse for Alternative Aircraft Position and Navigation



Abstract
:1. Introduction
2. Distance Measuring Equipment (DME) Ranging and Pulse Shape Requirements
3. Baseline Approach Using Genetic Algorithms for a DME Pulse Design
3.1. Chromosome Definition
3.2. Initial Population
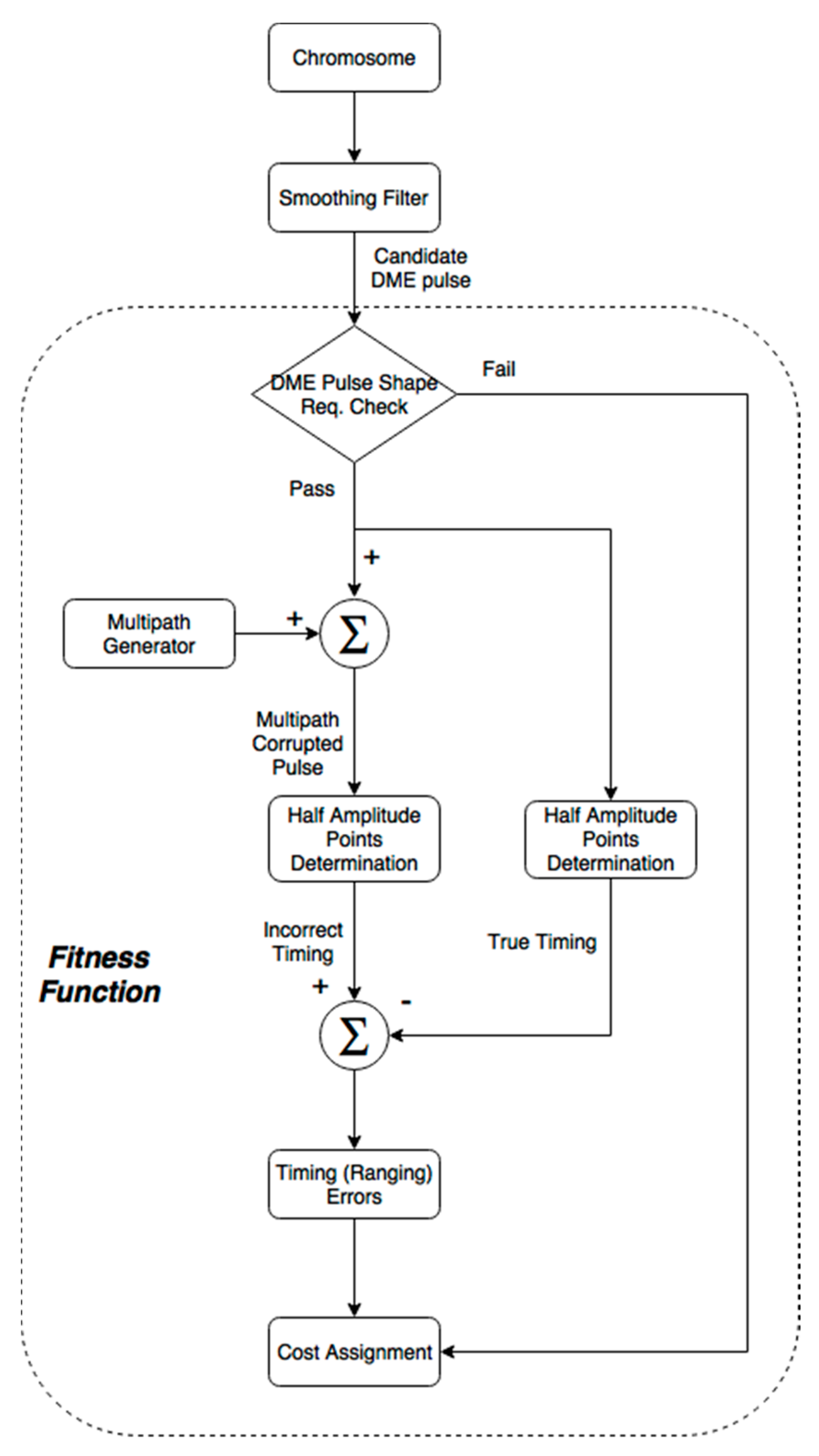
3.3. Fitness Function
3.4. Natural Selection, Paring, Mating, and Mutation
4. Results
4.1. Optimal DME Pulse Developed from the Genetic Algorithms Process
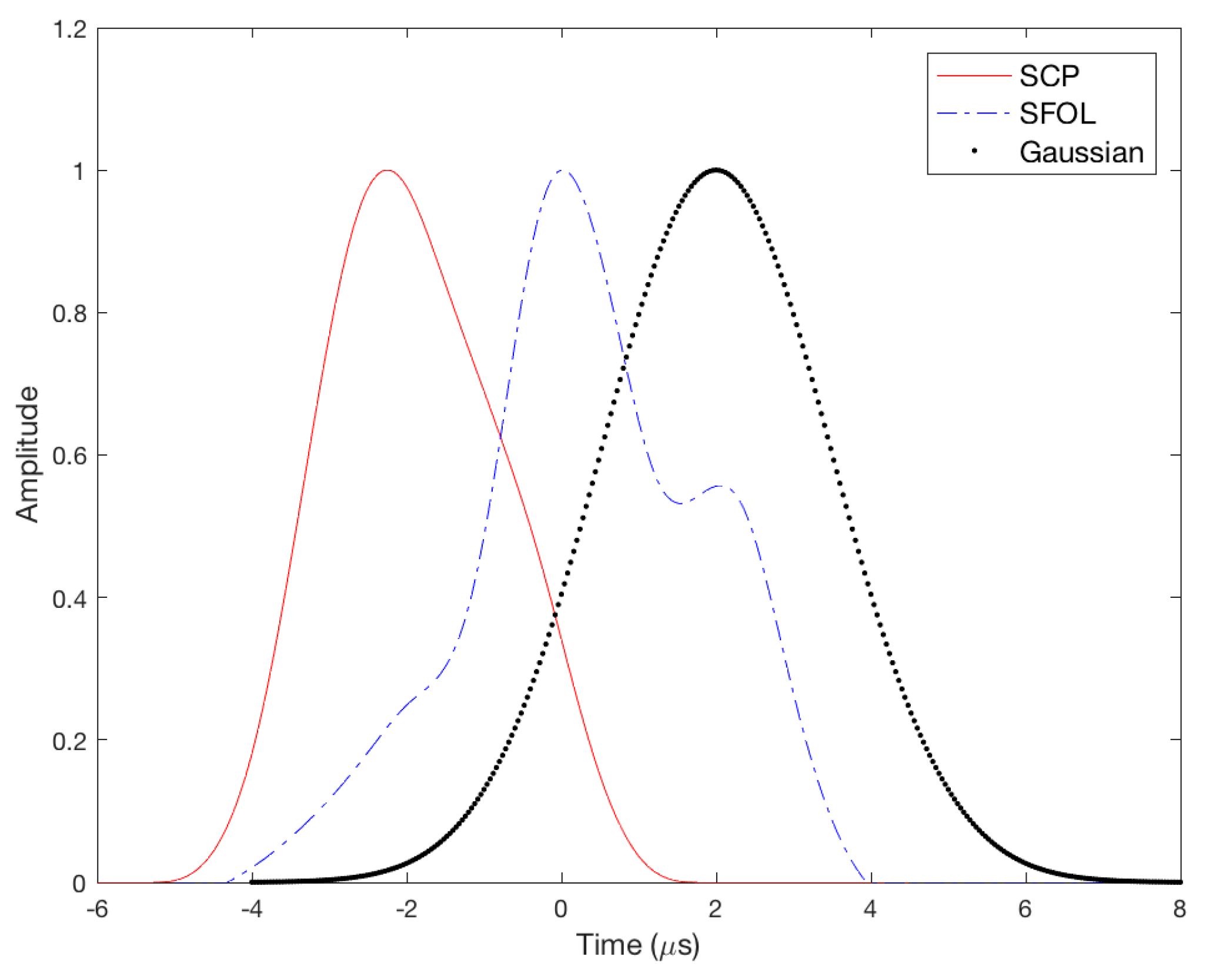
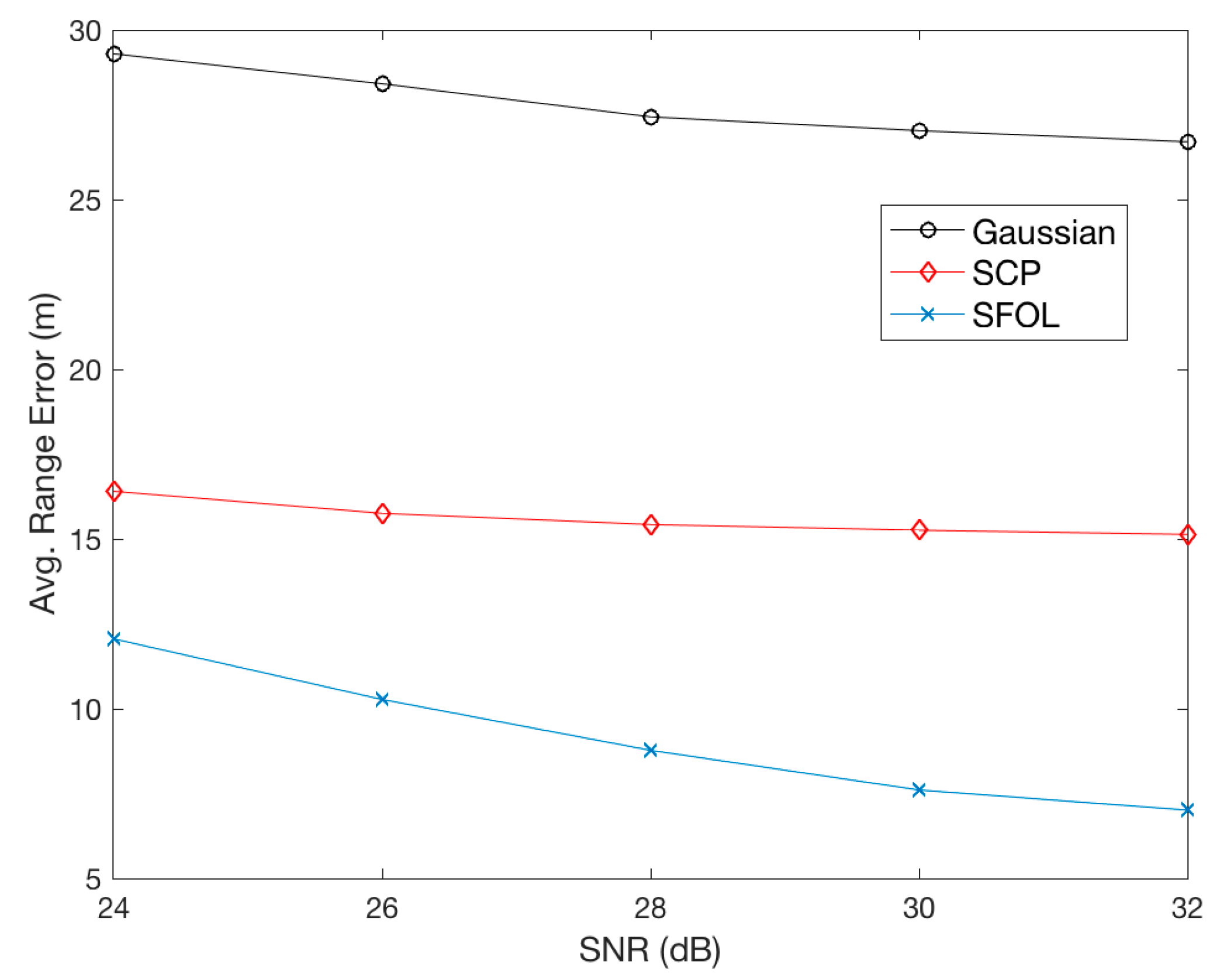
4.2. Ranging Accuracy Assessment of the Stretched-Front-Leg (SFOL) Pulse
5. Discussion of Sensitivity and Distortion Sources
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Grant, A.; Williams, P.; Ward, N.; Basker, S. GPS jamming and the impact on maritime navigation. J. Navig. 2009, 62, 173–187. [Google Scholar] [CrossRef]
- Seo, J.; Chen, Y.-H.; De Lorenzo, D.S.; Lo, S.; Enge, P.; Akos, D.; Lee, J. A real-time capable software-defined receiver using GPU for adaptive anti-jam GPS sensors. Sensors 2011, 11, 8966–8991. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.-H.; Juang, J.-C.; Seo, J.; Lo, S.; Akos, D.M.; De Lorenzo, D.S.; Enge, P. Design and implementation of real-time software radio for anti-interference GPS/WAAS sensors. Sensors 2012, 12, 13417–13440. [Google Scholar] [CrossRef] [PubMed]
- De Lorenzo, D.S.; Lo, S.C.; Seo, J.; Chen, Y.-H.; Enge, P.K. The WAAS/L5 signal for robust time transfer: Adaptive beamsteering antennas for satellite time synchronization. In Proceedings of the ION GNSS, Portland, OR, USA, 21–24 September 2010; pp. 2106–2116. [Google Scholar]
- Chen, Y.-H.; Juang, J.-C.; De Lorenzo, D.S.; Seo, J.; Lo, S.; Enge, P.; Akos, D.M. Real-time software receiver for GPS controlled reception pattern antenna array processing. In Proceedings of the ION GNSS, Portland, OR, USA, 21–24 September 2010; pp. 1932–1941. [Google Scholar]
- Jiao, Y.; Xu, D.; Morton, Y.; Rino, C. Equatorial Scintillation Amplitude Fading Characteristics across the GPS Frequency Bands. Navigation 2016, 63, 267–281. [Google Scholar] [CrossRef]
- Seo, J.; Walter, T.; Enge, P. Availability impact on GPS aviation due to strong ionospheric scintillation. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1963–1973. [Google Scholar] [CrossRef]
- Lee, J.; Morton, Y.T.; Lee, J.; Moon, H.-S.; Seo, J. Monitoring and mitigation of ionospheric anomalies for GNSS-based safety critical systems. IEEE Signal Process. Mag. 2017, 34, 96–110. [Google Scholar] [CrossRef]
- Seo, J.; Lee, J.; Pullen, S.; Enge, P.; Close, S. Targeted parameter inflation within ground-based augmentation systems to minimize anomalous ionospheric impact. J. Aircr. 2012, 49, 587–599. [Google Scholar] [CrossRef]
- Darr, S.; Ricks, W.; Lemos, K.A. Safer systems: A NextGen aviation safety strategic goal. IEEE Aerosp. Electron. Syst. Mag. 2010, 25, 9–14. [Google Scholar] [CrossRef]
- Mario, C.; Rife, J. Integrity and continuity for automated surface conflict-detection monitoring. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1179–1187. [Google Scholar] [CrossRef]
- Seo, J.; Walter, T. Future dual-frequency GPS navigation system for intelligent air transportation under strong ionospheric scintillation. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2224–2236. [Google Scholar] [CrossRef]
- Kim, O.-J.; Kim, C.; Song, J.; Yun, H.; Kim, D.; Kee, C. A New Concept of APNT: MOSAIC/DME 3-D Positioning with a Single DME Station. In Proceedings of the 2012 International Technical Meeting of the Institute of Navigation, Newport Beach, CA, USA, 30 January–1 February 2012; pp. 142–150. [Google Scholar]
- Chen, Y.-H.; Lo, S.; Akos, D.M.; Wong, G.; Enge, P. A Testbed for Studying Automatic Dependent Surveillance Broadcast (ADS-B) Based Range and Positioning Performance to Support Alternative Position Navigation and Timing (APNT). In Proceedings of the 26th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013; pp. 263–273. [Google Scholar]
- Lo, S.; Chen, Y.-H.; Enge, P.; Narins, M. Techniques to Provide Resilient Alternative Positioning, Navigation, and Timing (APNT) Using Automatic Dependent Surveillance—Broadcast (ADS-B) Ground Stations. In Proceedings of the 2015 International Technical Meeting of the Institute of Navigation, Dana Point, CA, USA, 26–28 January 2015; pp. 71–83. [Google Scholar]
- Pelgrum, W.; Li, K.; Smearcheck, M.; Frank, V.G. eDME Architecture Development and Flight-Test Evaluation. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 812–825. [Google Scholar]
- Li, K.; Pelgrum, W. A Non-uniform DFT-based Batch Acquisition Method for Enhanced DME (eDME) Carrier Phase: Concept, Simulations, and Flight Test Results. In Proceedings of the IEEE/ION PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 864–881. [Google Scholar]
- Thiasiriphet, T.; Shutin, D.; Schnekenburger, N. Application of Bayesian Filtering for Multipath in LDACS1-Based APNT Applications. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 3065–3075. [Google Scholar]
- Osechas, O.; Berz, G. Improving the availability of LDACS-based APNT with Air-to-Air ranging. In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–16 April 2016; pp. 91–99. [Google Scholar]
- Federal Aviation Administration (FAA). Performance-Based Navigation (PBN) National Airspace System (NAS) Navigation Strategy 2016; U.S. Department of Transportation: Washington, DC, USA, 2016.
- Kayton, M.; Walter, R.F. Avionics Navigation Systems; John Wiley & Sons: New York, NY, USA, 1997; pp. 123–133. [Google Scholar]
- Kim, E. Investigation of APNT Optimized DME/DME Network Using Current State-of-Art DMEs: Ground Station Network, Accuracy, and Capacity. In Proceedings of the IEEE/ION PLANS 2012, Myrtle Beach, SC, USA, 24–26 April 2012. [Google Scholar]
- Lilley, R.W.; Erikson, R. DME/DME for Alternative Position, Navigation, and Timing (APNT); APNT White Paper; Department of Transportation: Washington, DC, USA, 2012.
- Lo, S.; Enge, P. Assessing the Capability of Distance Measuring Equipment (DME) to Support Future Air Traffic Capacity. NAVIGATION J. Inst. Navig. 2012, 59, 249–261. [Google Scholar] [CrossRef]
- Tromboni, P.; Giovanni, B. An algorithm to rationalize a DME network as a backup for GNSS aircraft navigation. J. Air Transp. Manag. 2014, 34, 6–11. [Google Scholar] [CrossRef]
- Kim, E. Alternative DME/N pulse shape for APNT. In Proceedings of the 2013 IEEE/AIAA 32nd Digital Avionics Systems Conference (DASC), East Syracuse, NY, USA, 5–10 October 2013. [Google Scholar]
- Kim, E. Improving DME Performance for APNT Using Alternative Pulse and Multipath Mitigation. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 877–887. [Google Scholar] [CrossRef]
- Kim, E. Benefit Analysis of A GA-based DME/N Pulse on PBN. In Proceedings of the 2017 Integrated Communications Navigation and Surveillance (ICNS), Herndon, VA, USA, 18–20 April 2017. [Google Scholar]
- Haupt, R.L.; Haupt, S.E. Practical Genetic Algorithms; John Wiley & Sons: New York, NY, USA, 2004. [Google Scholar]
- Michalewicz, Z. Gas: What Are They? Genetic Algorithms + Data Structures = Evolution Programs; Springer: Berlin/Heidelberg, Germany, 1994; pp. 13–30. [Google Scholar]
- Federal Aviation Administration (FAA). Performance Specification Distance Measuring Equipment (DME), FAA-E-2996; U.S. Department of Transportation: Washington, DC, USA, 2008; pp. 18–19.
- Federal Communications Commission. Guidelines for Determining the Effective Power (ERP) and Equivalent Isotropically Radiated Power (EIRP) of a RF Transmitting System; Office of Engineering and Technology Laboratory Division: Washington, DC, USA, 2010.
- Baumert, T.; Grosser, M.; Thalweiser, R.; Gerber, G. Femtosecond time-resolved molecular multiphoton ionization: The Na 2 system. Phys. Rev. Lett. 1991, 67, 3753–3756. [Google Scholar] [CrossRef] [PubMed]
- Baumert, T.; Brixner, T.; Seyfried, V.; Strehle, M.; Gerber, G. Femtosecond pulse shaping by an evolutionary algorithm with feedback. Appl. Phys. B Lasers Opt. 1997, 65, 779–782. [Google Scholar] [CrossRef]
- Turhan-Sayan, G.; Kuzuoglu, M. Pole estimation for arbitrarily-shaped dielectric targets using genetic algorithm-based resonance annihilation technique. Electron. Lett. 2001, 37, 380–381. [Google Scholar] [CrossRef]
- Turhan-Sayan, G.; Inan, S.; Iuce, T.; Leblebicioglu, K. Applications of Artificial Neural Networks and Genetic Algorithms to Electromagnetic Target Classification. In Proceedings of the RTO SCI Symposium on the Application of Information Technologies (Computer Science) to Mission Systems, Monterey, CA, USA, 20–22 April 1998. [Google Scholar]
- Pang, Y.; Gary, X.S. Improving excitation and inversion accuracy by optimized RF pulse using genetic algorithm. J. Magn. Reson. 2007, 186, 86–93. [Google Scholar] [CrossRef] [PubMed]
- Evans, J.E. L-Band DME Multipath Environment in the Microwave Landing System (MLS) Approach and Landing Region; No. ATC-116; MIT Lincoln Laboratory: Lexington, MA, USA, 1982; pp. 5–51. [Google Scholar]
- Raich, R.; Qian, H.; Zhou, G.T. Orthogonal polynomials for power amplifier modeling and predistorter design. IEEE Trans. Vehicular Technol. 2004, 53, 1468–1479. [Google Scholar] [CrossRef]
- Kramer, O. Genetic Algorithm Essentials; Springer: New York, NY, USA, 2017. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pulse Shape Parameters | Range |
|---|---|
| Rise Time | 2.5 (+0.5, −1.0) μs |
| Pulse Top | No instantaneous fall below a value which is 95% of the maximum voltage amplitude of the pulse |
| Pulse Duration (width) | 3.5 (±0.5) μs |
| Fall Time | 2.5 (±0.5) μs |
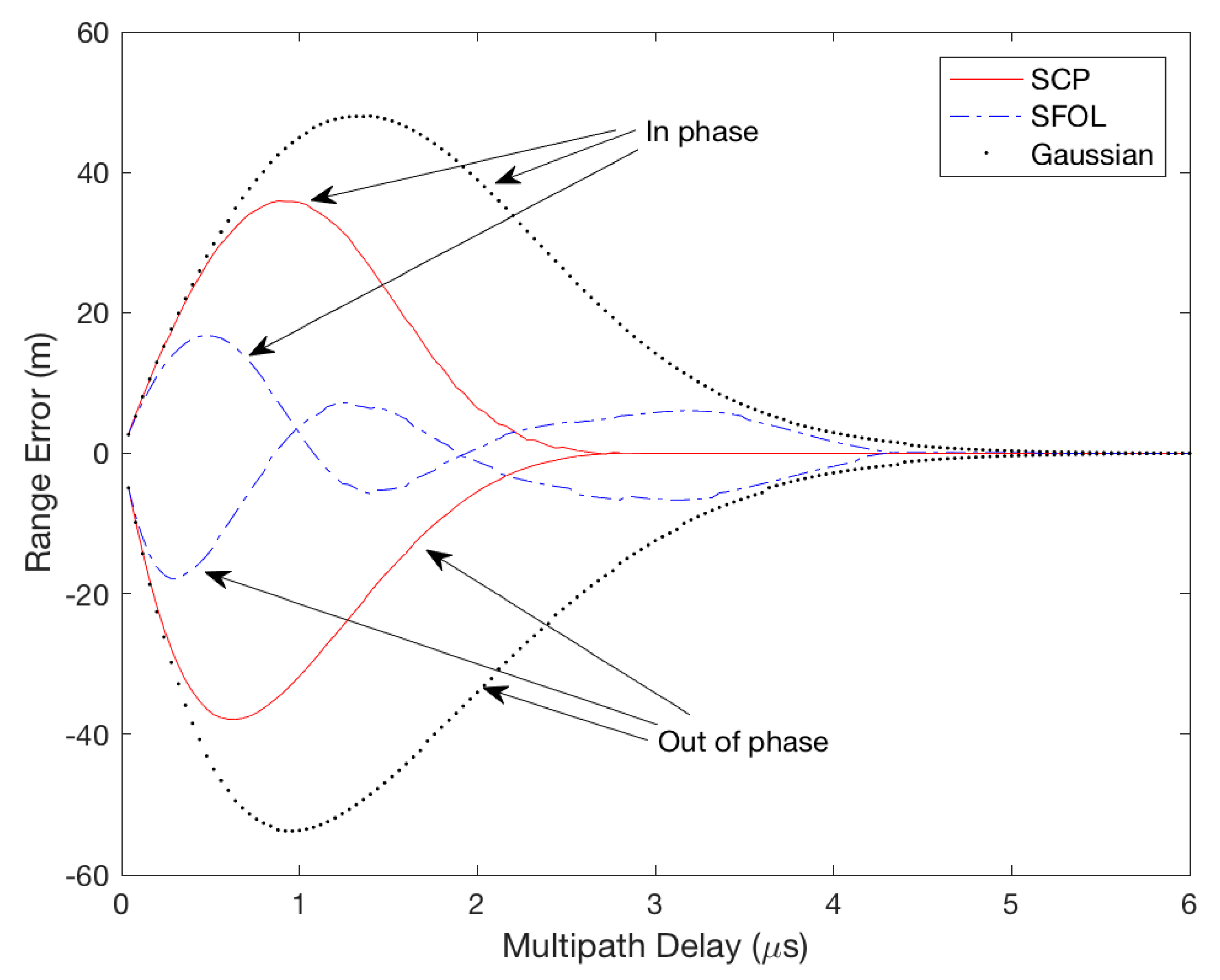
| Pulse | RMS (m) | Maximum (in Phase, m) | Maximum (out of Phase, m) |
|---|---|---|---|
| Gaussian | 26.1 | 48.0 | −53.75 |
| SCP | 14.9 | 35.9 | −37.9 |
| SFOL | 5.9 | 16.8 | −17.9 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, E.; Seo, J. SFOL Pulse: A High Accuracy DME Pulse for Alternative Aircraft Position and Navigation. Sensors 2017, 17, 2183. https://doi.org/10.3390/s17102183
Kim E, Seo J. SFOL Pulse: A High Accuracy DME Pulse for Alternative Aircraft Position and Navigation. Sensors. 2017; 17(10):2183. https://doi.org/10.3390/s17102183
Chicago/Turabian StyleKim, Euiho, and Jiwon Seo. 2017. "SFOL Pulse: A High Accuracy DME Pulse for Alternative Aircraft Position and Navigation" Sensors 17, no. 10: 2183. https://doi.org/10.3390/s17102183
APA StyleKim, E., & Seo, J. (2017). SFOL Pulse: A High Accuracy DME Pulse for Alternative Aircraft Position and Navigation. Sensors, 17(10), 2183. https://doi.org/10.3390/s17102183