3.1. Network Model
A multi-WBAN network consists of
n mobile WBANs, denoted as
Bi, 1 <
i <
n, where each WBAN consists of one coordinator and
m sensor nodes. There are two types of intra-WBAN communications: a sensor node sends data to the coordinator and vice versa. For simplicity, the transmission range of a WBAN is denoted as a circle with radius
R in which intra-WBAN communication occurs. However, the inter-WBAN communication is defined as the transmission between multiple coordinators of WBANs in the same vicinity. In general, if one or more nodes are within the transmission range of a node, they are called neighbors of the node. In this paper, the term neighbor is used to describe the interfering source of a WBAN. In our study, the free space path loss model is assumed for intra-WBAN and inter-WBAN links. The channel gain of body-to-body links is modeled as gamma distribution as in [
30].
At time
t, γ
i,s(
t) is the SINR at the coordinator of
Bi, as the signal comes from sensor
s in
Bi and it is defined as
where
Pi,s(
t) and
Pi,j(
t) are the received signal power at the coordinator of
Bi for the signals that originate at sensor
s in
Bi and the received signal power from the coordinator of
Bj, respectively.
The free space path loss model uses the path loss exponent of 2 and is proportional to the distance between transmitter and receiver. The received power at the coordinator of
Bi,
Prx is represented as
where
Ptx is the transmit power,
η is the path loss exponent, and
d(
t) is the distance from the source to the coordinator of
Bi;
d(
t) can be
di,s(
t) or
di,j(
t) for intra- or inter-WBAN transmission, respectively.
Mobility is caused by human posture and movement which changes rapidly over time. The operating time can be divided into a set of T epochs. Therefore, at each time t, we consider multiple WBANs as a graph G(t) = (V(t), E(t)), in which V(t) is the set of WBANs at time t and E(t) is the set of interfering links between WBANs at time t. An interference link is defined if the transmission ranges of two nearby WBANs overlap. If the distance between two WBANs is less than the interference range, they interfere with one another. A WBAN Bi is interfered with if any sensor interferes with other WBANs, or γi(t) < γth | γi(t) = min{γi,s(t), 1 ≤ s ≤ m}. The interference links at Bi can be represented as di,j(t) < R | i,j ∈ V(t). The set of neighbors that interferes with Bi is denoted as NBi(t) = {NBi(t) ∪ Bj | γi(t) < γth, di,j(t) < R}. The set of all interfering WBANs in the network is denoted as S(t) = {NBi (t) ∪ (NBj (t) | I, j ∈ V(t)}. The maximum degree of S(t) is denoted as ΔS(t) = max{Δ(Bi)| i ∈ V(t)} in which Δ(Bi) is the degree of Bi. Each Bi creates interfered sensor groups and non-interfered sensor groups: Ii = {s | γs,i < γth, 1 ≤ s ≤ m}, NIi = {s | γs,i > γth,1 ≤ s ≤ m}, respectively.
Because each WBAN is considered as a mobile network, the reference point group mobility model (RPGM) [
26] can be used to represent WBAN movement behavior. For each WBAN, the coordinator is considered as the reference point in the group mobility model and moves with a constant speed
vi(
t) in each epoch, while all sensor nodes within the WBAN follow the coordinator’s motion behavior. The group motion vector of the coordinator will map the location of the coordinator whereas all sensor nodes add the node-dependent random motion vectors to the group motion vector. At time
t, the location of the sensor node
Ys(
t) in a WBAN is given by the following:
Ys(
t) =
Yc(
t) +
RVs,c(
t), where
RVs,c(
t) is a node-dependent local displacement or random motion vector of the sensor nodes, and
Yc(
t) is the location of the coordinator at time
t.
In a real-world scenario, people wearing a WBAN can move either close to or far away from another WBAN. We define interference duration at a WBAN as the duration that the WBAN is interfered with by the concurrent transmission of other WBANs. If the transmission ranges of two WBANs overlap for more than the threshold time, the interference duration is long; otherwise, the interference duration is short. In the case of short interference duration, one WBAN may move away from the overlapped transmission range.
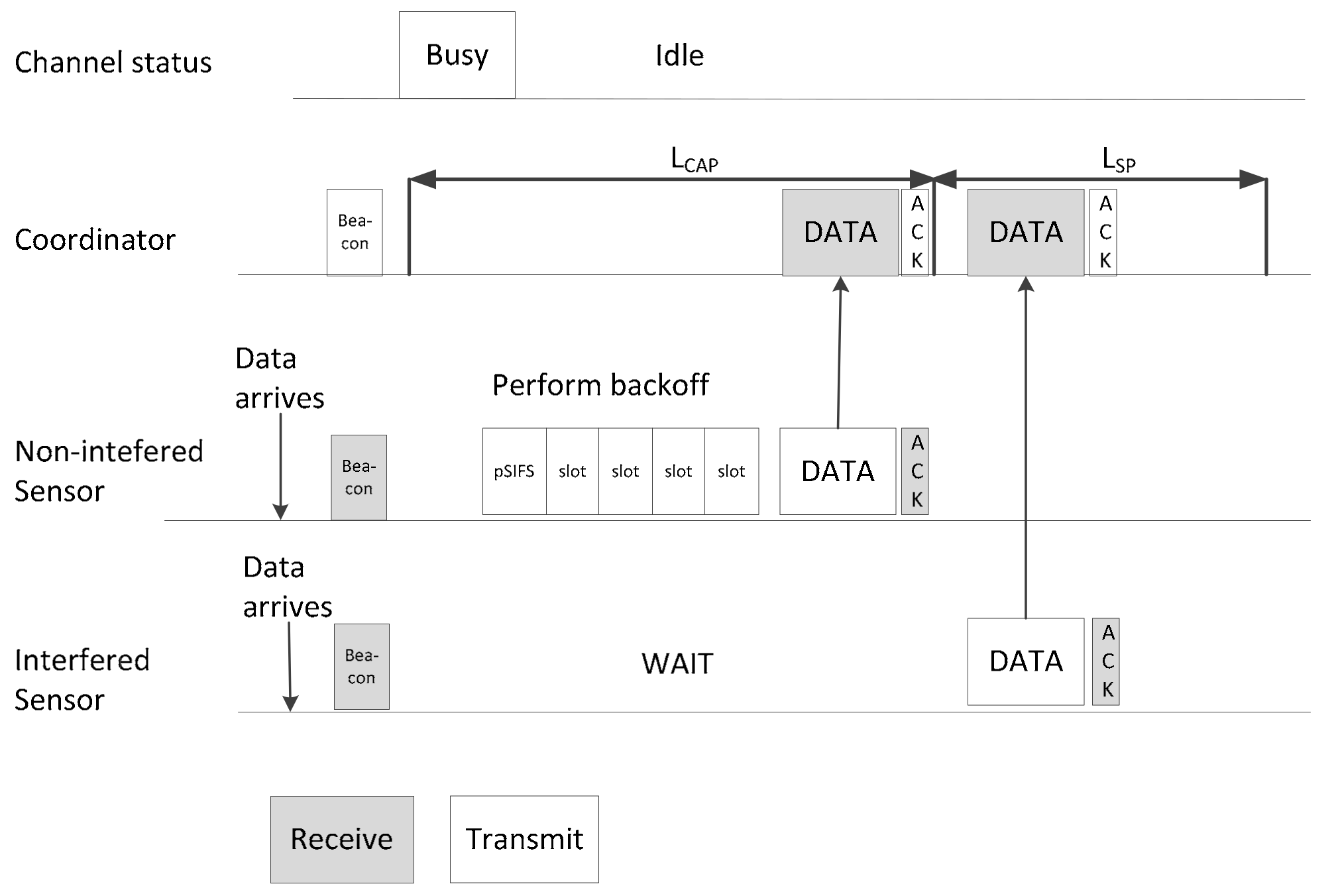
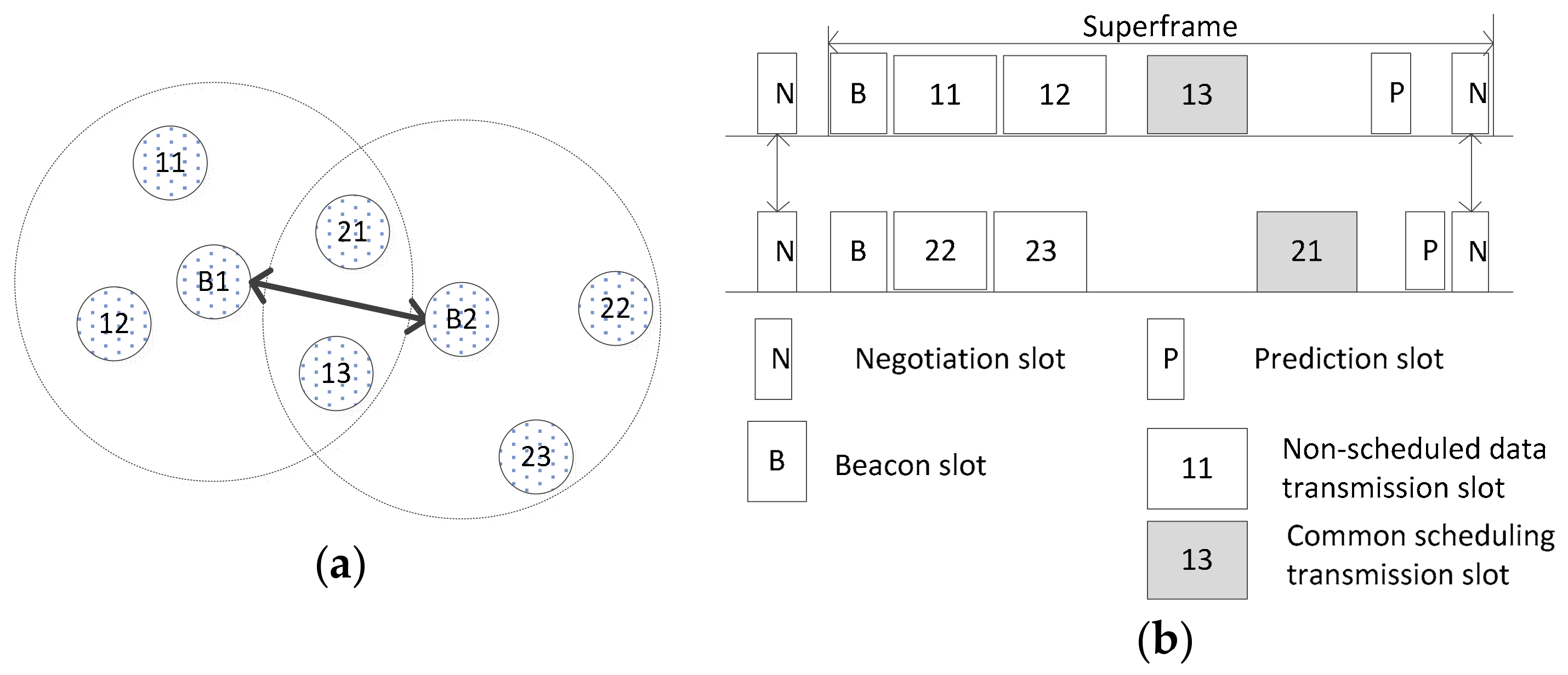
For interference avoidance, we take into account the negotiation between the coordinators of interfered WBANs as follows: the coordinators will exchange the schedule during the negotiation time before starting a new superframe. We assume that all the coordinators are synchronized so that the superframe can start at the same time for all coordinators.
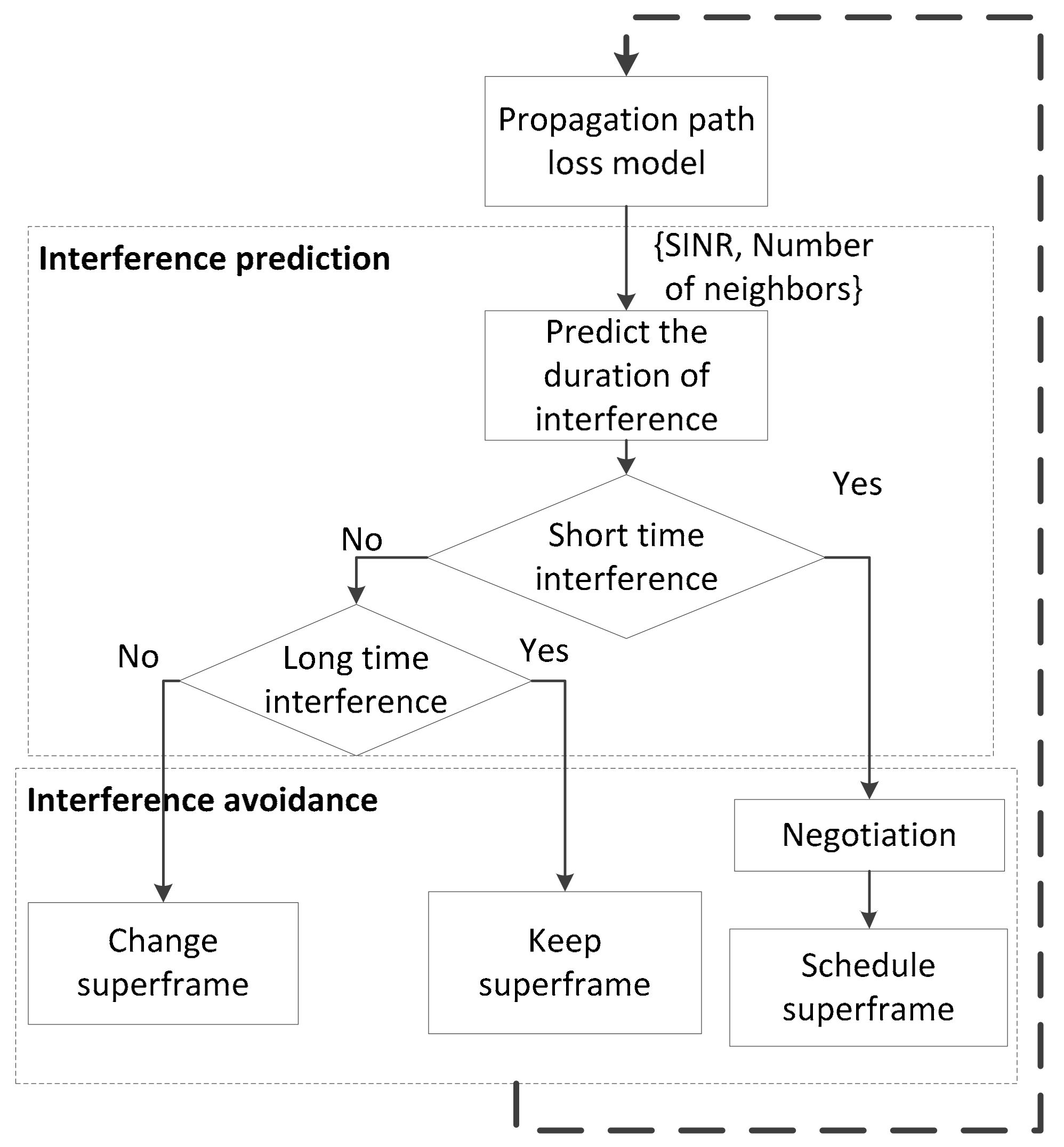
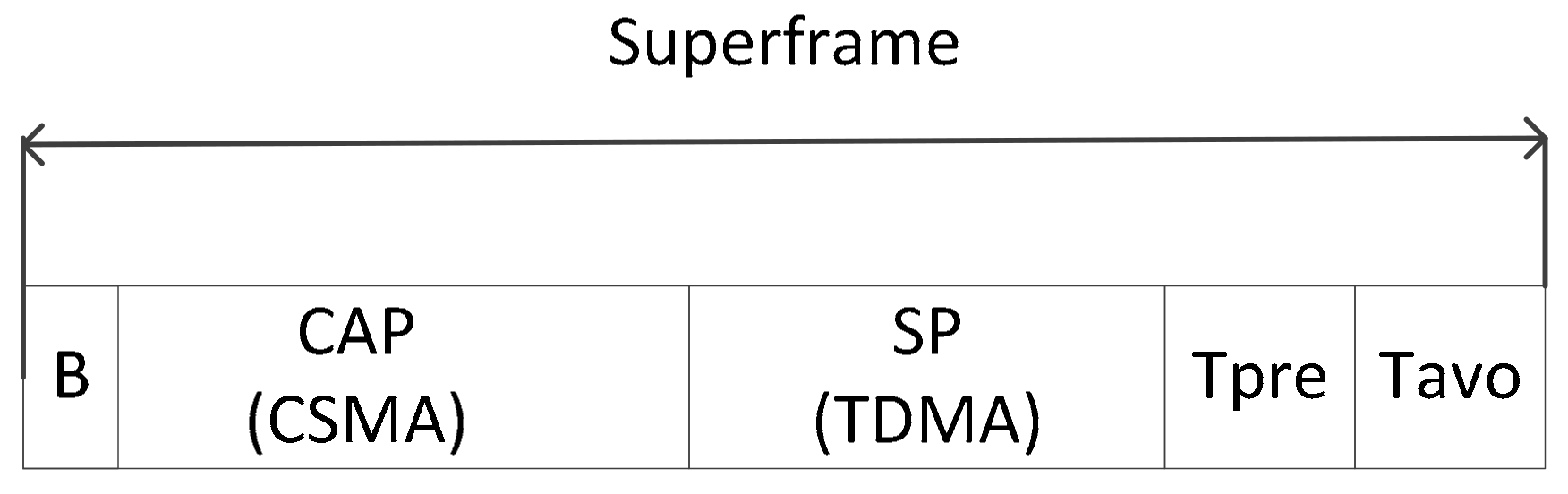
Figure 1 shows the interference prediction and avoidance at each WBAN coordinator. In the LSIP, the interference avoidance step allows WBANs to use two different types of MAC superframes with regard to interference duration. In the case of long time interference, the number of neighbors may not change immediately. Hence, the schedule of multiple WBANs can be kept the same. However, if the number of neighbors is either increased or decreased, the schedule in the superframe may be changed. Due to the negotiation step and the scheduling algorithm, the continuity of signals from sensor nodes to the coordinator is ensured within the acceptable delay. However, the delay is constrained by the negotiation time between a WBAN and its neighbors, which must be below a given threshold. We propose a scheduling algorithm for multiple WBANs, which uses a hybrid MAC superframe structure based on the hybrid carrier multiple access of CSMA/CA and a scheduled part with TDMA. The coordinators will negotiate with the neighbor WBANs for the schedule of the nodes’ transmissions. By applying TDMA in the MAC superframe, the two-hop WBANs can reuse the time slot, which will increase the network throughput.
3.2. Bayesian Inference Classifier for Interference Prediction
The IEEE standard 802.15.6 has defined the coexistence environment of multiple WBANs in
Table 1. The coexistence states are categorized by the duration of the coexistence condition based on the mobility level (i.e., slowly moving or fast moving) and the traffic data rate. However, the parameters for distinguishing between the states are not clearly defined in the standard.
In our algorithm, we consider the number of neighbors and the SINR value to obtain the duration of interference. The duration of interference is represented as
TIF, which can be divided into two cases: short-time interference (
ShortIF), if the interference duration is shorter than a given threshold value
Tthr, and long-time interference (
LongIF), if the interfered duration is longer than
Tthr. Therefore, the state of the WBAN can be one of three cases: no interference (
None),
ShortIF, and
LongIF. We apply the inference model of the Bayesian inference classifier in [
31] to the interference prediction process to determine the next state of a WBAN. The Bayesian inference model is chosen because of low complexity so that it can be easily applied to WBANs with high accuracy.
The Bayesian inference classifier in [
31] which operates as an inference system is used to predict the next state of a WBAN. The Bayesian inference classifier has two input values: the number of interfering neighbors and the SINR value. These are represented as
xNI and
xSINR, respectively. The possible state is defined as
State = {
None,
ShortIF,
LongIF}. The classifier will choose the most probable value among the possible values according to the input training values by using the maximum a posteriori (MAP) method. The probability of predicting the next state uses naïve Bayesian prediction. Hence, the state using MAP,
sMAP, can be represented as
where
si indicates the class within the possible states {
State}, and
xNI and
xSINR represent the input values. By applying the Bayes’ theorem, we have
Assuming that the input values are conditionally independent, the outcome of the classifier,
sMAP, can be calculated as
where
p(
xSINR |
si) and
p(
xNI |
si) can be obtained by observing the training data set.
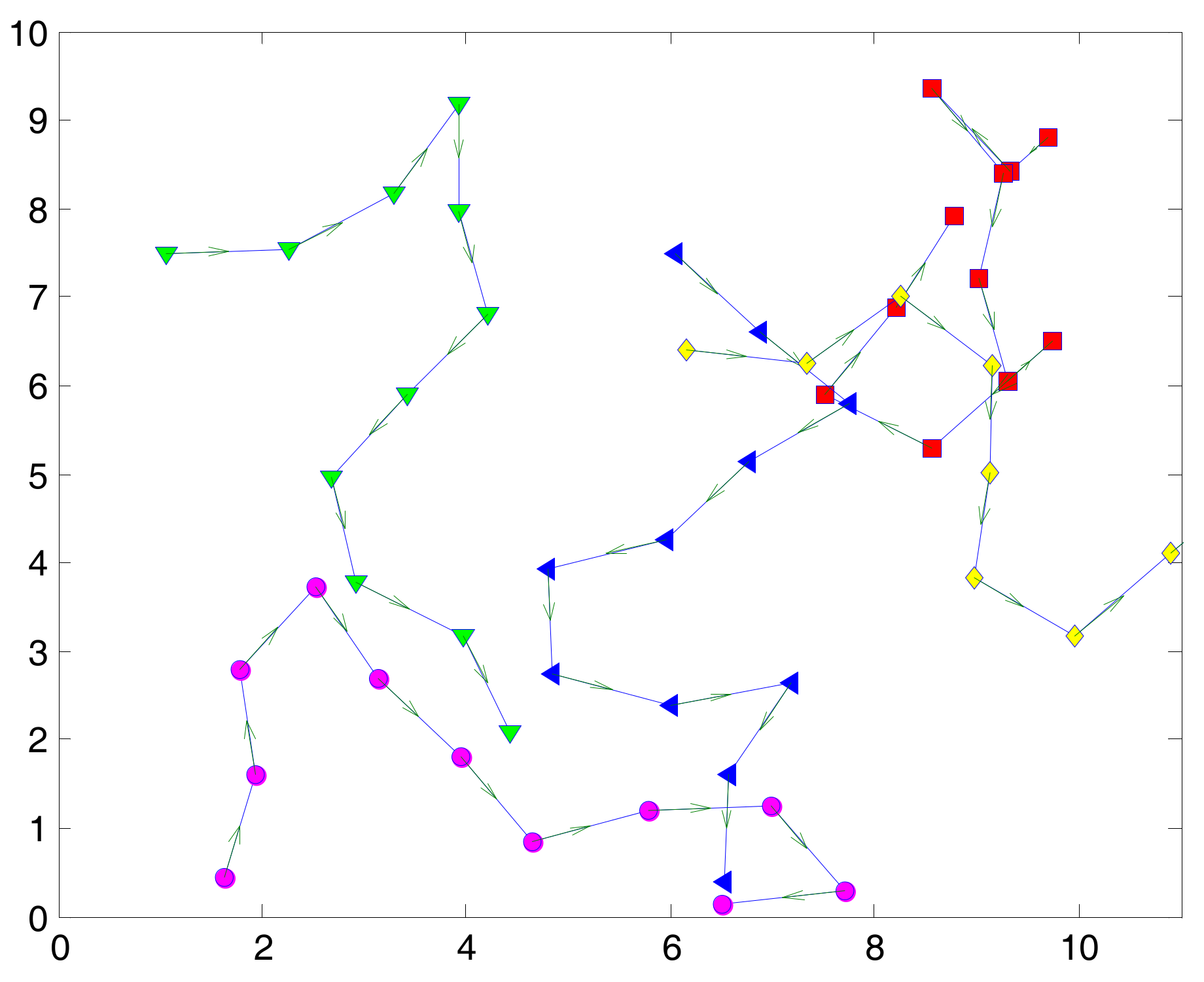
To verify the training value of the prediction algorithm, we deploy the network with multiple mobile WBANs for the duration of 100 s. The coordinator of each WBAN will follow the random waypoint model [
32] to choose a destination at the next epoch time and move with a given speed while the sensor nodes follows the group velocity model. In our study, the deployment for multiple mobile WBANs is quite similar to the scenario for hospital applications in [
33]. An example of the deployment area of five mobile WBANs is shown in
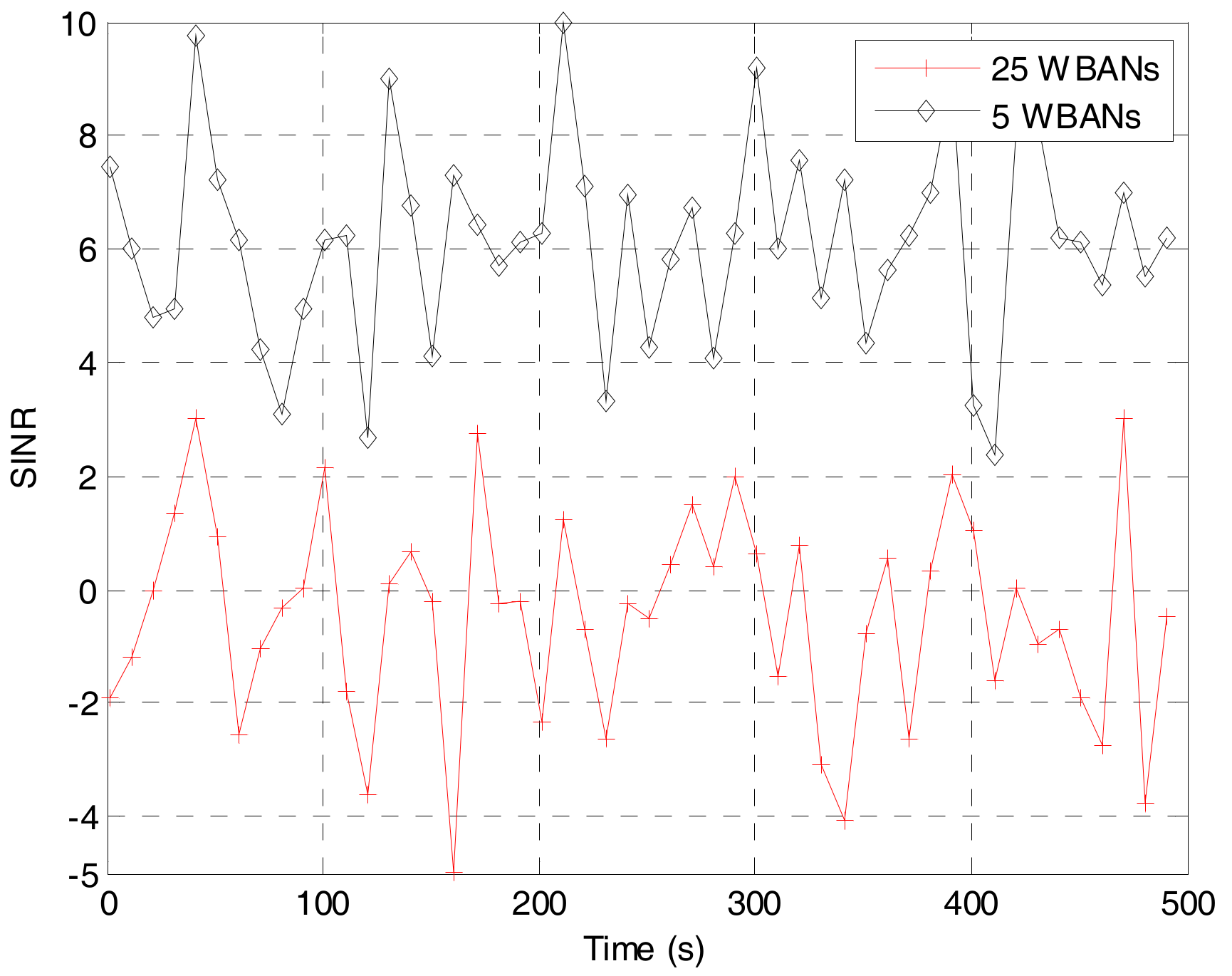
Figure 2. A WBAN with an index number begins its movement at white signs which can be square, circle, or diamond marker, follows the dashed line as shown in the smaller marker, and ends at the black signs. Based on the deployment, we have extracted the average SINR and the average number of neighbors for a WBAN as shown in
Figure 3 and
Figure 4, respectively. From the extracted data, we have classified the inputs of the Bayesian inference classifier in
Table 2. As a result, a training table is set up in
Table 3 to predict the next state of the tagged WBAN. The threshold value (
Tthr) of interference duration is set as 10 s.
In a real scenario for WBANs, a person can walk with low speed or high speed [
8,
33]. Therefore, we have evaluated the result of the interference prediction with the scenario of 25 WBANs moving with the speed of 0–2 m/s. For a single WBAN, the results of interference prediction are shown in
Table 4.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}