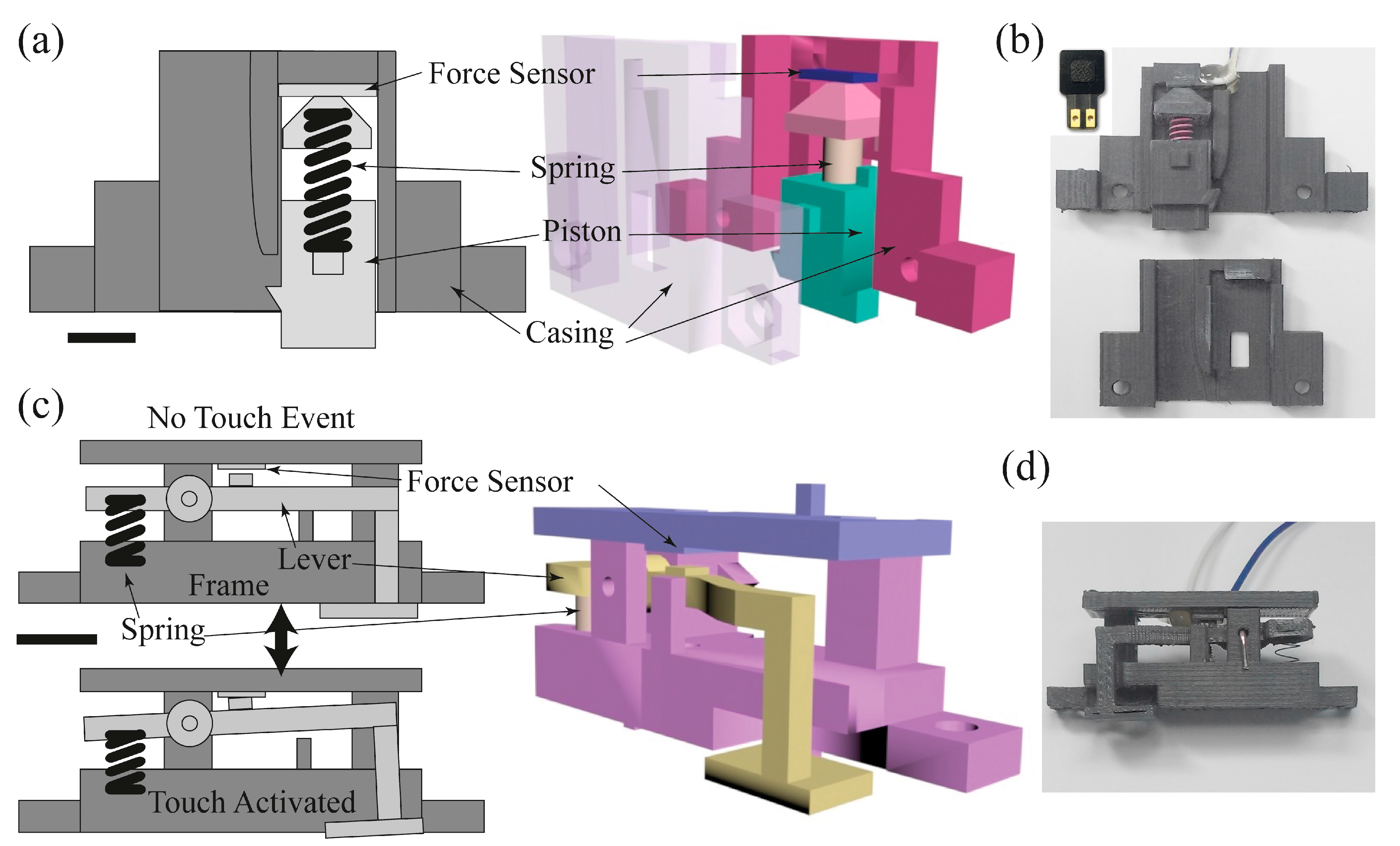
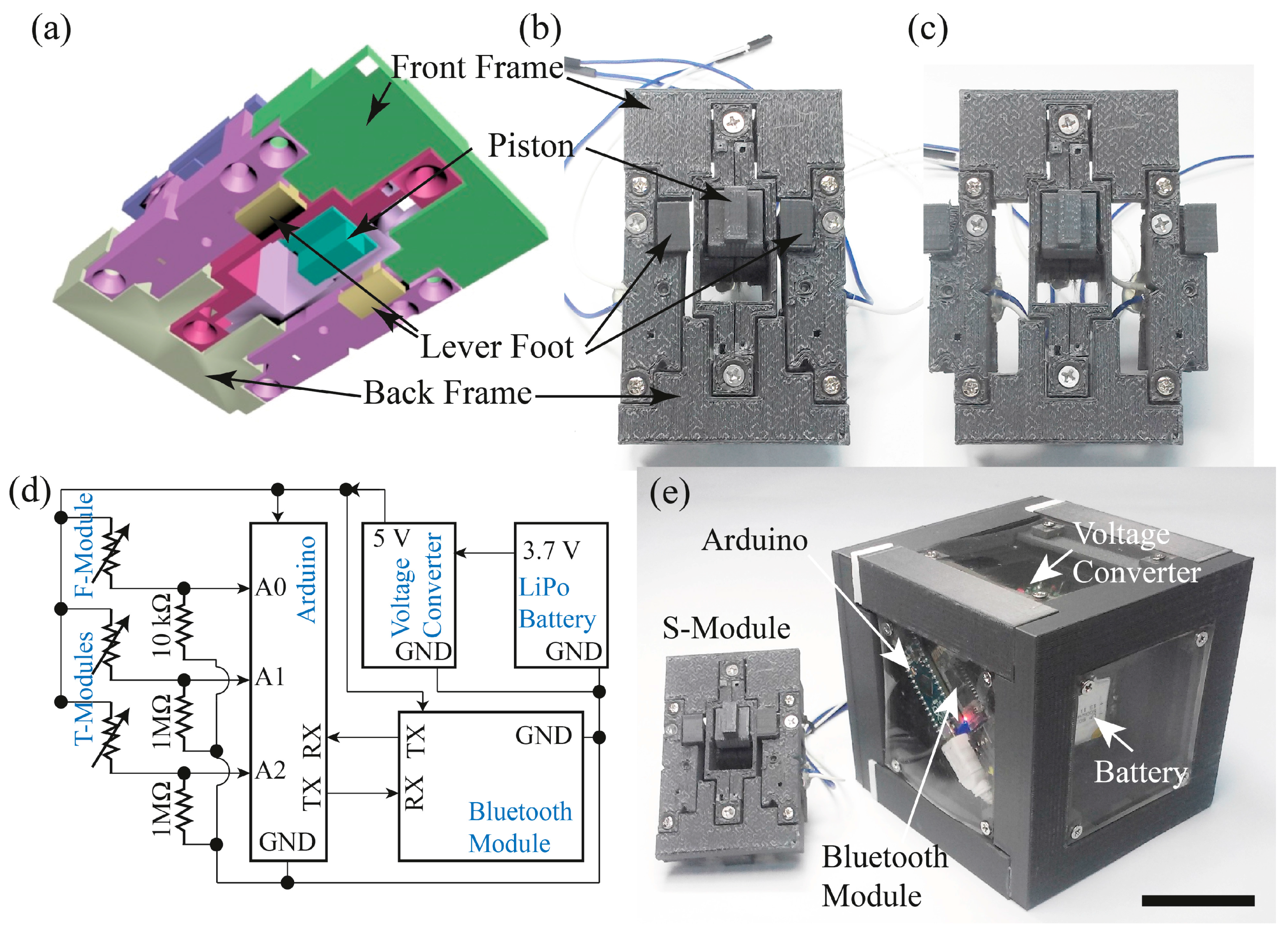
5.1. Stiffness Measurement Module Assembly
The f-module and two t-modules were assembled into the stiffness sensing module (s-module). The f and t-modules were held by two frames; the front frame and the back frame (
Figure 6a,b). The separation of t-modules from the f-module
dt, can be adjusted by interchanging the locations of the two t-modules as shown in
Figure 6c. The stiffness measuring system was designed to be portable with a dedicated control circuitry, communication module and a power supply, all assembled into an independent system. A driving circuit was prepared as shown in
Figure 6d. The inputs from the f-module and t-modules were connected to the analog inputs of a micro-controller board (Arduino Uno, Arduino, Turin, Italy). For the f-module, a 5 V bias was provided by the Arduino board, and the sensor was serially connected to a 10 kΩ resistor. The output of the sensor was fed into an analog input by a pull-down method. When no force was applied to the sensor, the sensor was basically an open switch, and the input terminal will record 0 V. When there was a force above threshold, the sensor passes a current and the input will record a finite voltage below 5 V. The wiring for the t-module was identical to that of the f-module, a pull-down connection to an analog input to the Arduino board with a 1 MΩ resistor. The activation of the t-module was identified when the input voltage was above a specified voltage to the input channel. Power was supplied by a Lithium-polymer (LiPo in short) battery which produces 3.7 V. The voltage was shifted up to 5 V through a voltage shifter (PowerBoost 1000, Adafruit Industries, New York, NY, USA), and it was supplied to the Arduino and a Bluetooth module (HC-06, Waveshare, Shenzhen, China). A Bluetooth module was connected to the Arduino board for wirelessly transferring the measured voltages to a computer.
Figure 6e shows a picture of the completed system.
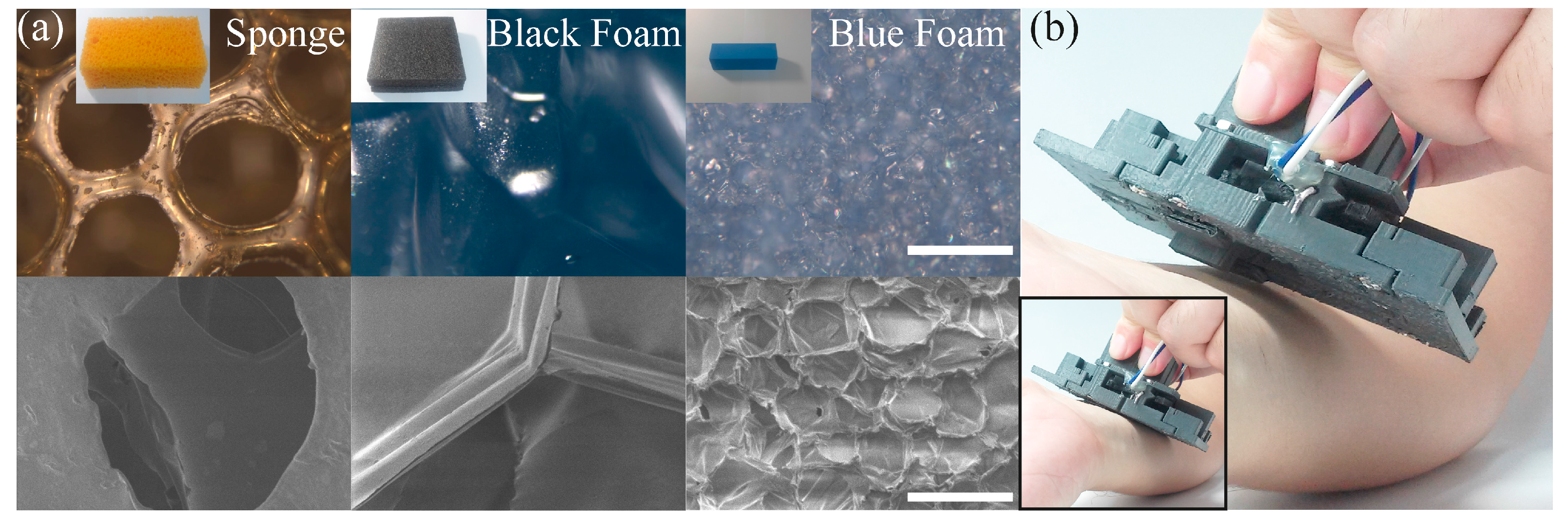
Four materials with different stiffness were chosen for stiffness measurement demonstration; sponge made of polyurethane, black foam made of polystyrene, blue foam made of polyolefin (
Figure 7a), and human forearm skin. For measurements, the top portion of the f-module was hand-held, and the s-module was pressed against the object until both of the t-modules were activated, as shown in
Figure 7b. The moment of activation was registered by an Arduino code, and the force at the moment was recorded. Ten repeated measurements were done per object with the t-module activation set at 26 ± 3 g measured force.
In
Section 2, Equation (3) shows that the measurement depends on three factors,
dt,
k1, and
xi. In the following subsections, we will show how the stiffness discriminating capability of the s-module was modified, by adjusting piston protrusion, spring constant, and the t-module separation distance.
5.2. Effect of t-Module Separation Length Difference
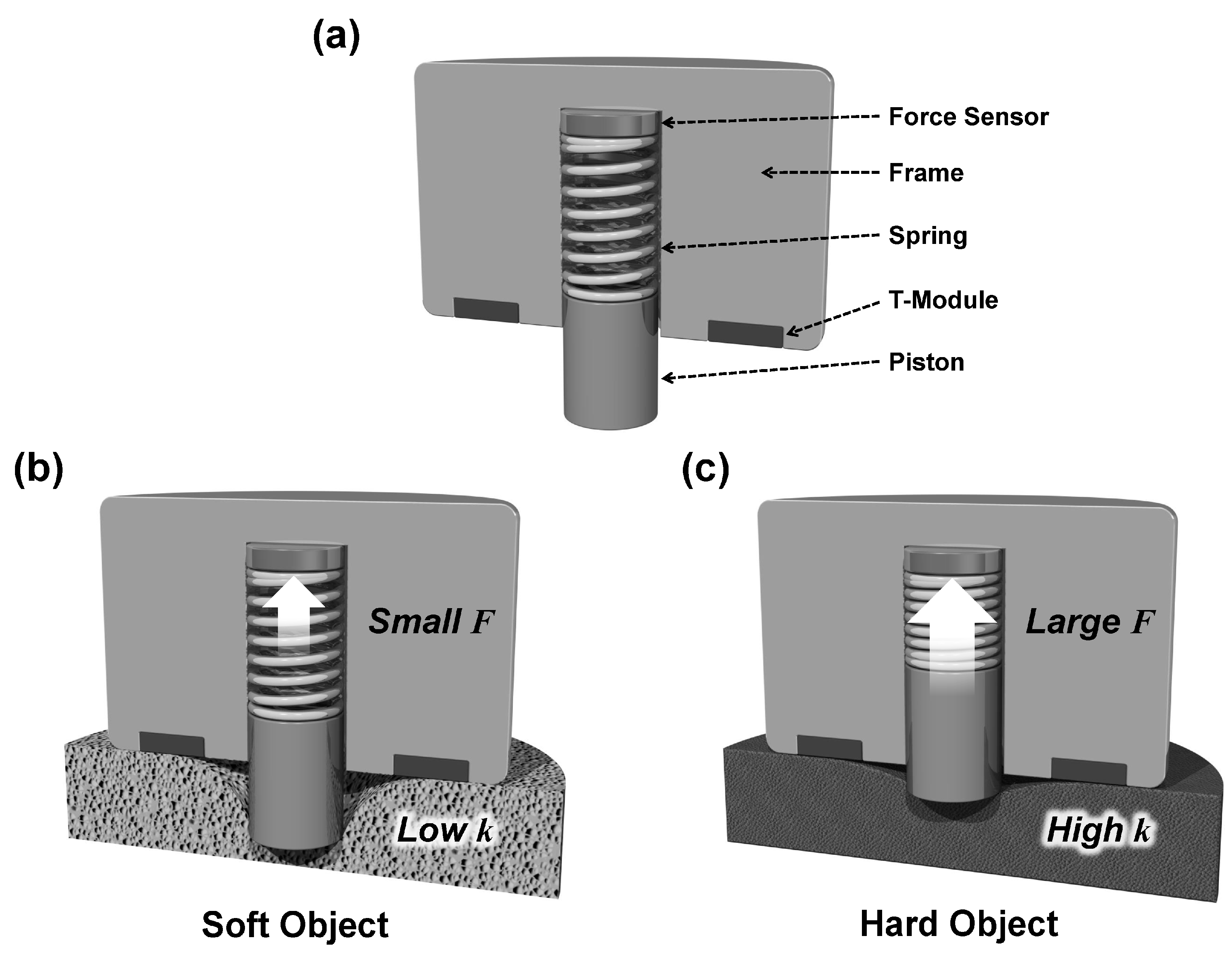
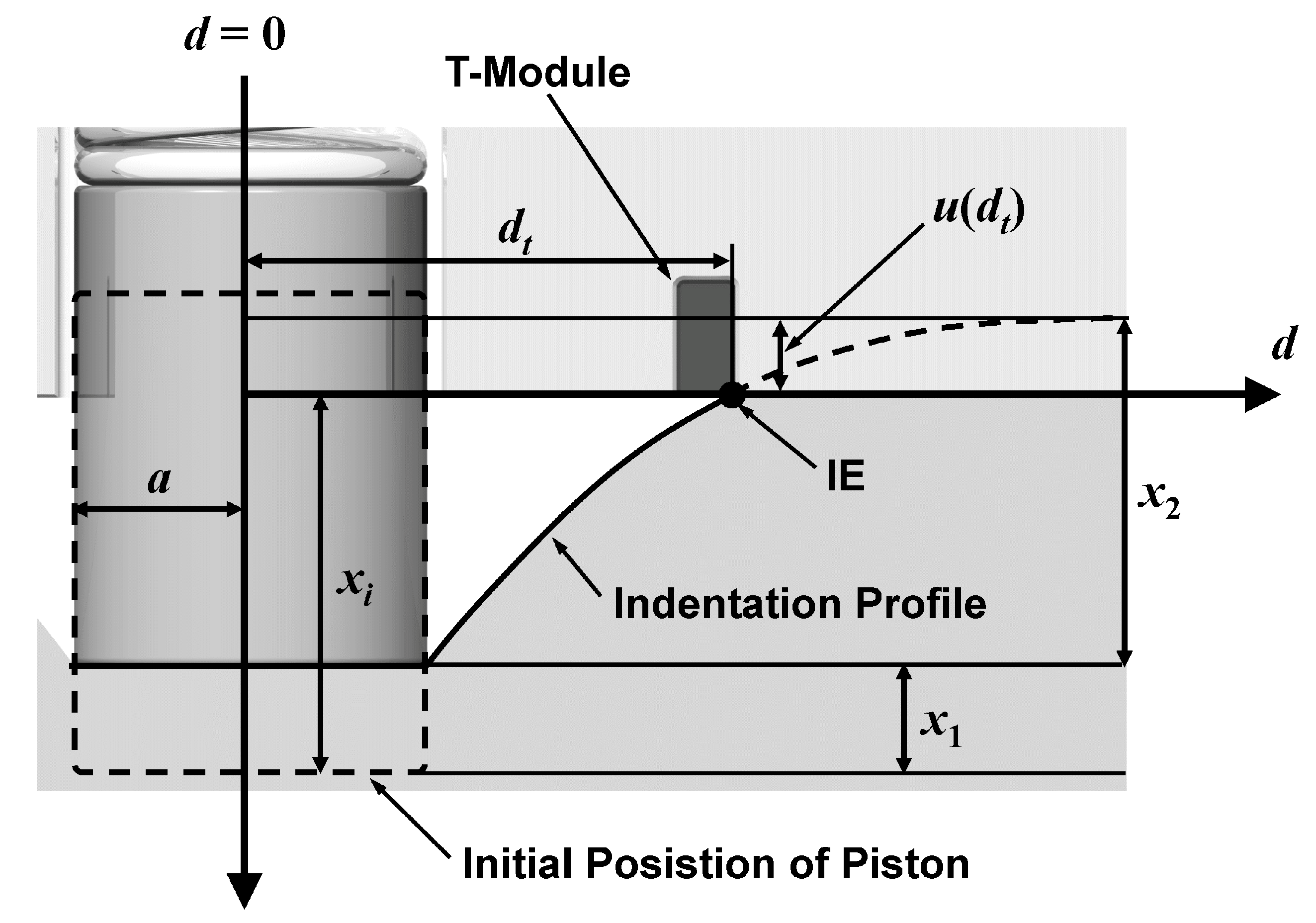
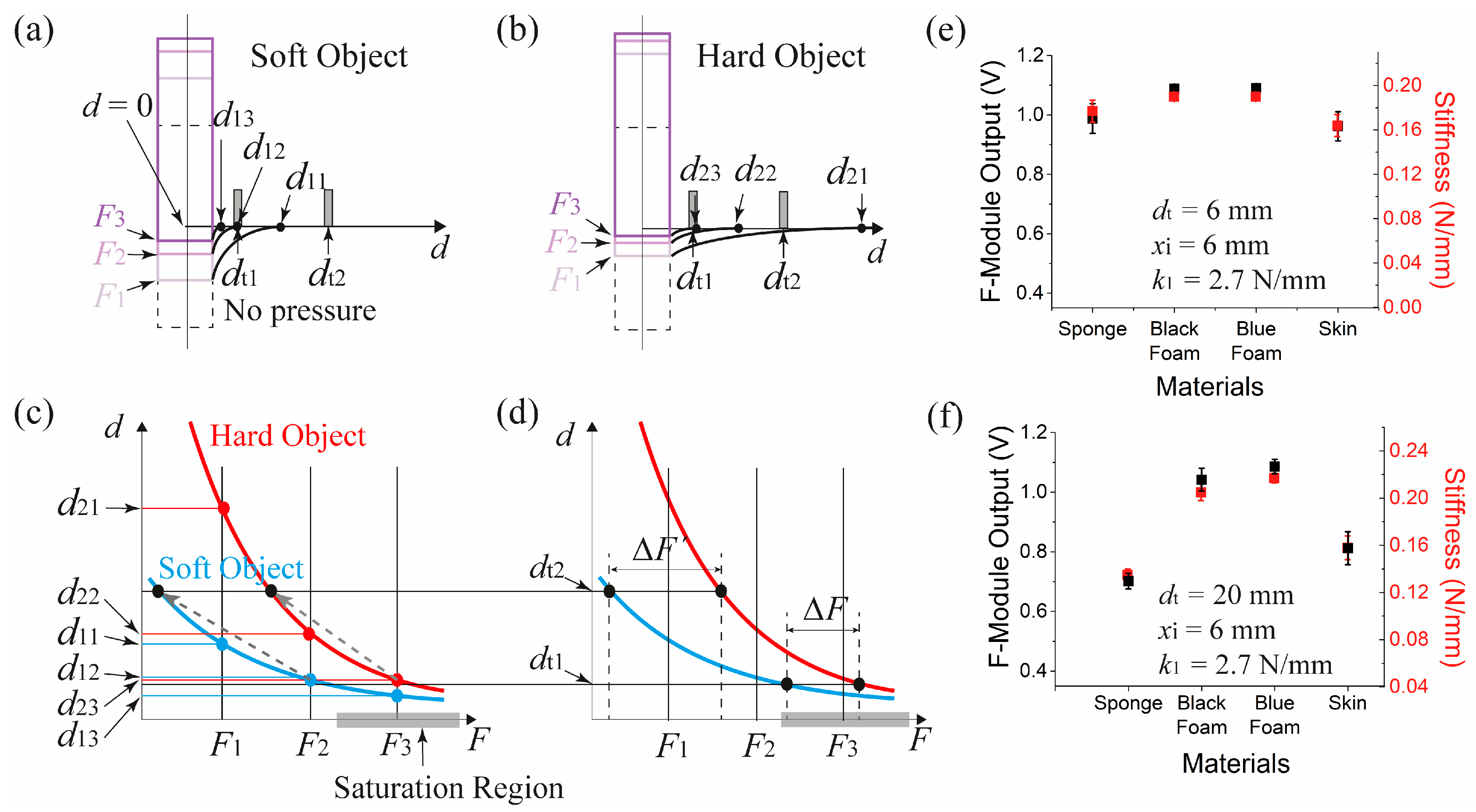
When force is applied to an object through the piston, the object surface will start to deform accordingly. With increased force, the object surface will touch the s-module bottom surface and the edge of the surface indentation IE point will be definable. The IE will approach toward the center as the reactive force received by the object increases. For a softer object, the indentation depth will be relatively deep and the IE movement range will be narrow and close to the piston (
Figure 8a). For a harder object, the indentation depth will be relatively shallow, and the IE movement range will be relatively wider and farther from the piston since the surface will be less deformable (
Figure 8b). When the force is
F1, the IE of the two cases will be
d11 and
d21 each. In both cases, the t-modules located at distance
dt1 will not be activated and no measurement will be recorded. If the softer object is pressed further until the force becomes
F2, at which point
d12 =
dt1, then the t-module will be activated and the stiffness will be recorded. However at the same force with the harder object, the t-module will not be activated still (
d22 >
dt1). The harder object needs to be pressed further until
F3 is applied to activate the t-module (
d23 =
dt1). Thus the difference of the recorded force indicates the difference of the stiffness between the two objects.
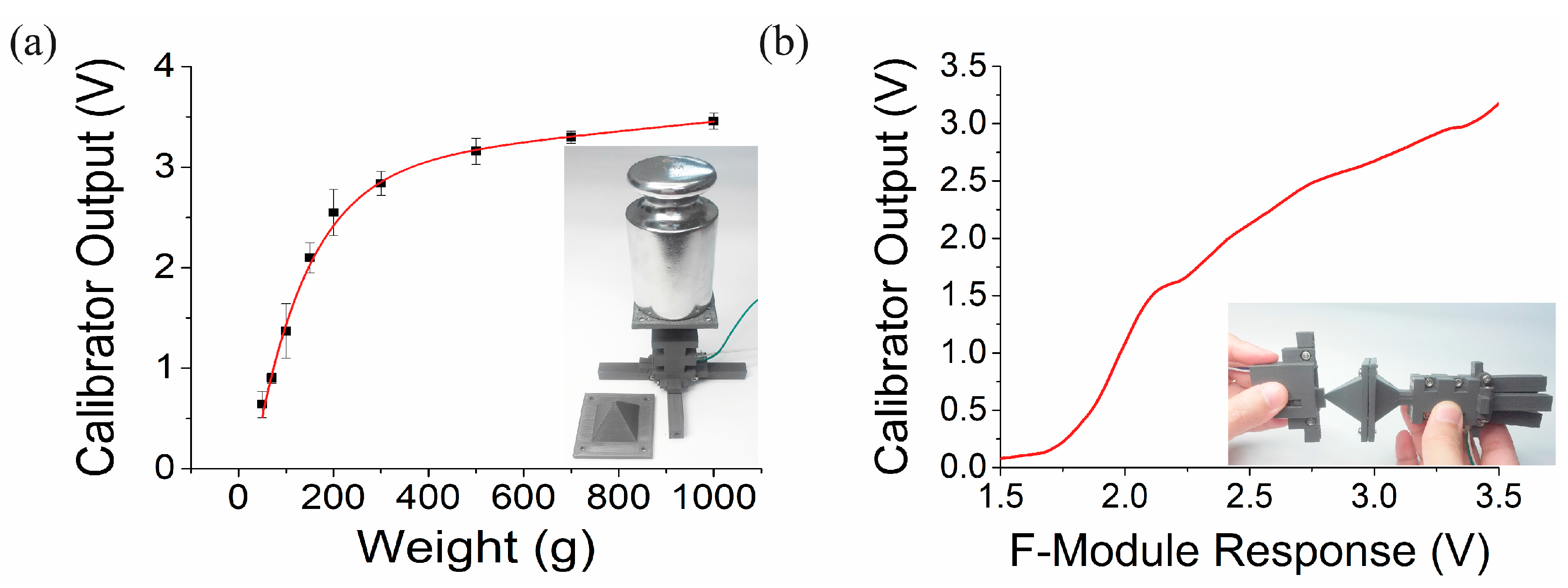
In principle, the location of the touch module should not matter for the measurement, but usually a force sensor has a saturation range at high pressures. In that case, the recorded force values, for example,
F2 and
F3 will not be much different in terms of the sensor output (see
Figure 4a). To avoid this problem, one can use the more linear range of the sensor simply by locating the t-modules further away, from
dt1 to
dt2. In this new arrangement, the harder object’s stiffness will be recorded at a force less than
F2, instead of
F3, and the softer object will touch the t-module at a force less than
F1 (dashed arrows and black dots in
Figure 8c). Thus our system has the advantage that by adjusting the t-module separation it will be possible to choose the sensing region of the force sensor for better stiffness discrimination. Note that the recorded force difference
ΔF’ at
dt2, becomes larger than
ΔF at
dt1 and the new measurements avoids the saturation range of the force sensor (a numerical plot of
Figure 8d is shown in
Figure S1 of the Supplementary Materials).
Figure 8e,f show the effect before and after the separation distance change. It can be seen that the sensor outputs were not discernible between the objects when the separation was 6 mm, but after the separation was increased to 20 mm, the stiffness difference became obvious. For measuring extremely soft surfaces with very low surface tension, it may be desirable to have the t-module separation be reduced making the force sensor operate above its threshold for better force measurement reliability. The measured voltages in
Figure 8f were converted to the stiffness via module calibration and Equation (4). The stiffness of the tested objects were between 0.13 N/mm and 0.22 N/mm. To verify these results, we measured stiffness separately by recording deformation of the objects under known weights. As a result, we obtained 0.098 N/mm (30 kPa) 0.227 N/mm (57 kPa), and 0.250 N/mm (94 kPa) for the sponge, the black foam, and the blue foam, respectively. Also, these numbers were similar in range to the estimated stiffness (0.1–1 N/mm) of the materials based on their Young’s moduli [
14,
15,
16] and of their geometries showing that the proposed stiffness measurement method was applicable. Stiffness of the skin cannot be obtained by this method. But, according to [
17], the Young’s modulus of skin is about 10–20 kPa. If we assume that the skin thickness was roughly 1 cm and the area of skin under indentation was 0.8 cm
2 (0.55 cm × 1.45 cm), the stiffness of the skin can be calculated using the following equation:
where
k is the stiffness,
E is the Young’s modulus,
A is the indentation area, and
t is the thickness. The calculated stiffness of skin is 0.08~0.16 N/mm
2, which roughly agrees with our result. Further calibration and system optimization should be able to increase measurement accuracies.
5.3. Effect of Piston Protrusion Difference
In the previous subsection, we have shown that the t-module separation can enhance the stiffness discrimination ability. But for some applications, the t-module separation can be limited due to geometrical considerations. Also requirement on local stiffness assessment can limit the size of the s-module itself. In these cases, large separation will not be possible, and other alternative methods for enhancing the discrimination ability should be investigated. One method is to change the piston protrusion (xi), and the other is to change the spring constant (k1).
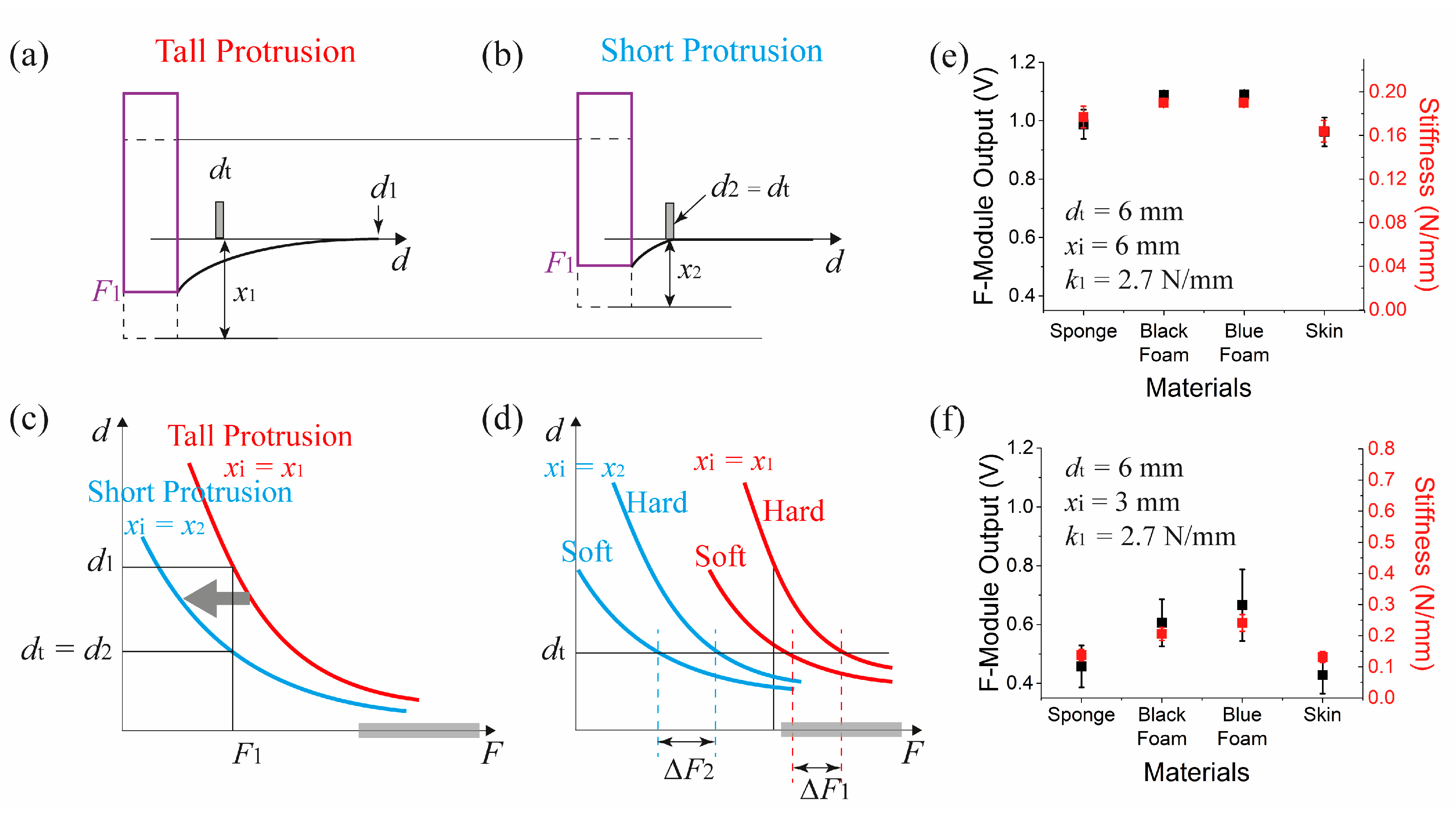
Figure 9a–d show the effect of piston protrusion on the measurements. Let us assume that there are two identical s-modules with the same
dt and same
k1, except different piston protrusions from the bottom of the s-module. When two identical objects are pressed against them with identical force
F1, the pistons indentation will be the same, but their IE points will be different. At this force, the IE for the short protrusion
d2 will coincide with the t-module position at
dt (=
d2), while the IE for the tall protrusion
d1 will be larger than
d2. Thus compared to the tall protrusion module, one can apply smaller forces for stiffness measurement. For shorter protrusions, the result will be a shift of the IE point curve in
Figure 9c toward the left and reduction of the force required to measure the stiffness. This feature is advantageous when there are two objects consisting of relatively soft and hard materials that require smaller t-module separation due to their size limitation. If their measurements are recorded near the saturation region of the force sensor, one can reduce the protrusion of the piston to shift the measurement range to below the sensor saturation region (
Figure 9d).
The effect of protrusion change was verified from the two data sets shown in the
Figure 9e,f. They show two sets of measurements when the protrusion of the piston was 6 mm and 3 mm each. When the 3 mm protrusion was used, the measured force difference between objects became enlarged enough so that the stiffness of soft materials like sponge or skin were distinct from that of the foams.
5.4. Effect of Spring Constant Difference
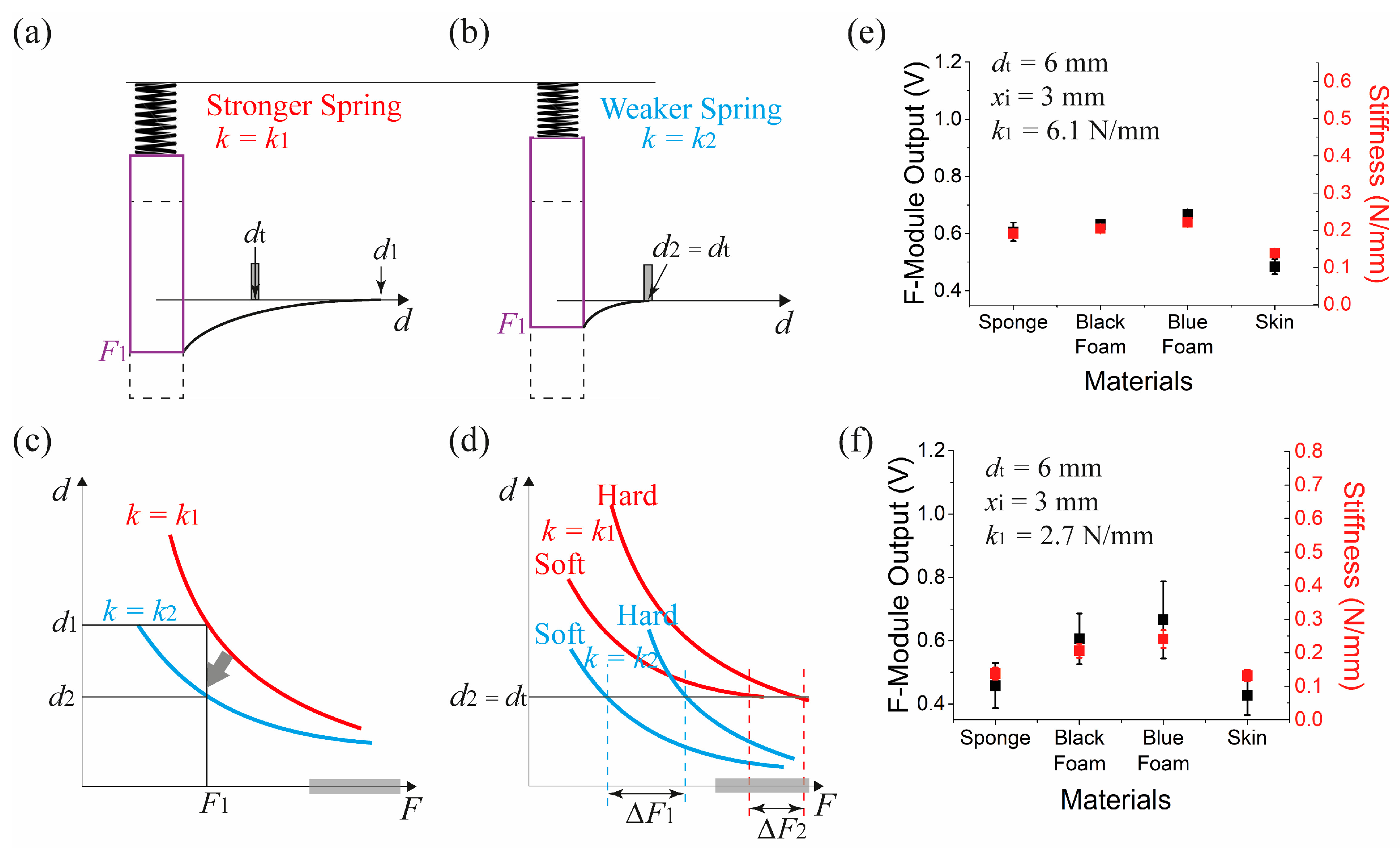
Figure 10 shows the effect of spring constant difference on the stiffness measurement.
Figure 10a,b compare the difference of IE locations under identical applied force,
F1. In case of the relatively stronger spring,
d1 does not reach
dt and no force is measured (
Figure 10a). For the weaker spring, the piston is indented further resulting in a closer IE and
d2 reaches
dt, and a measurement of the applied force is made. Thus the effect of changing the spring constant is to shift the IE dependence on the applied force, as shown in
Figure 10c. For a fixed t-module position at
d2 (=
dt), we can see from
Figure 10d, that using the softer spring results in a wider separation in the measured forces for the soft and hard objects because it was possible to avoid the force sensor saturation region. This was demonstrated experimentally by comparing two datasets shown in
Figure 10e,f.
Here the two s-modules have identical configurations including the t-module separation (
dt = 6 mm) and spring protrusion (
xi = 3 mm), except for the spring constant. For the case of the weaker spring (
k1 = 2.7 N/mm) (
Figure 10f), the dispersion of the force measurements were clearer than that of the case using the stronger spring (
k1 = 6.1 N/mm: SWC10-15, Misumi Spring) (
Figure 10e).
We can understand the dependence on the spring constant by considering the deformation of contacting objects. For the stronger spring, an object needs to be pressed harder for the stiffness measurement to take place. It results in higher pressure applied to the force sensor and the measurement to be taken near the saturation region of the sensor.
From the results presented, we find that our method of stiffness measurement overcomes the need for depth measurement, or simultaneous measurement of several force sensors in parallel. Also by alternating passive elements, our stiffness measuring system can be adjusted to measure stiffness at various ranges for better discrimination of stiffness between different objects. Moreover, the operating principle is simple enough that the sensor components may be scaled and optimized to fit onto much smaller areas allowing it to be integrated into passive manipulation tools used today in such applications as, medical examination, remote surgery, and artificial robotic fingers.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









