Dynamic Obstacle Avoidance for Unmanned Underwater Vehicles Based on an Improved Velocity Obstacle Method

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Preliminaries
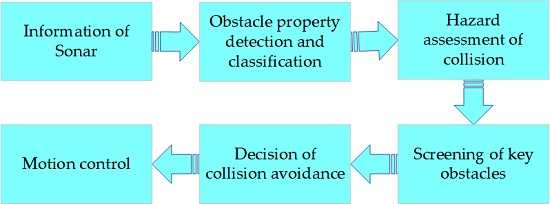
2.1. Environmental Modeling
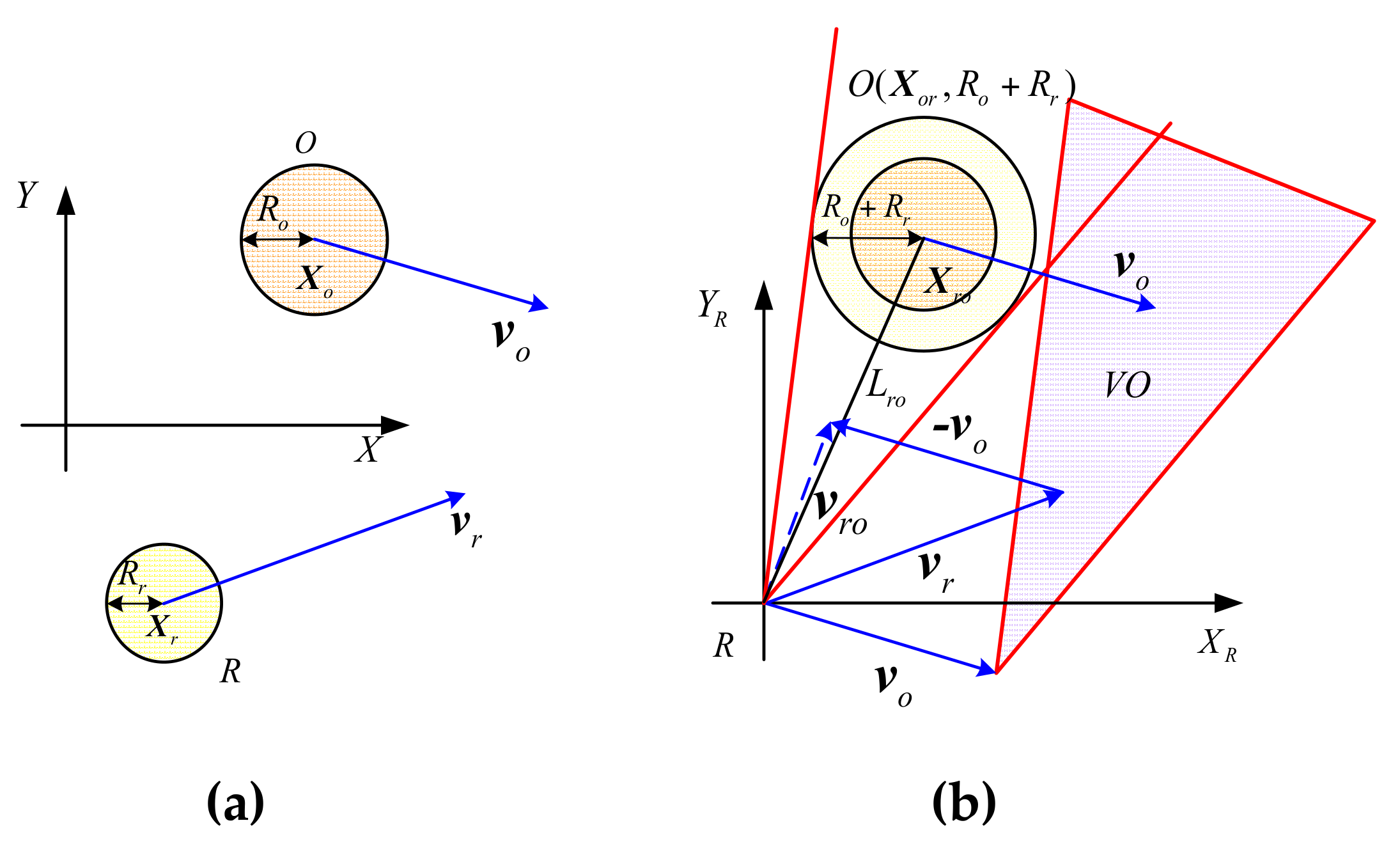
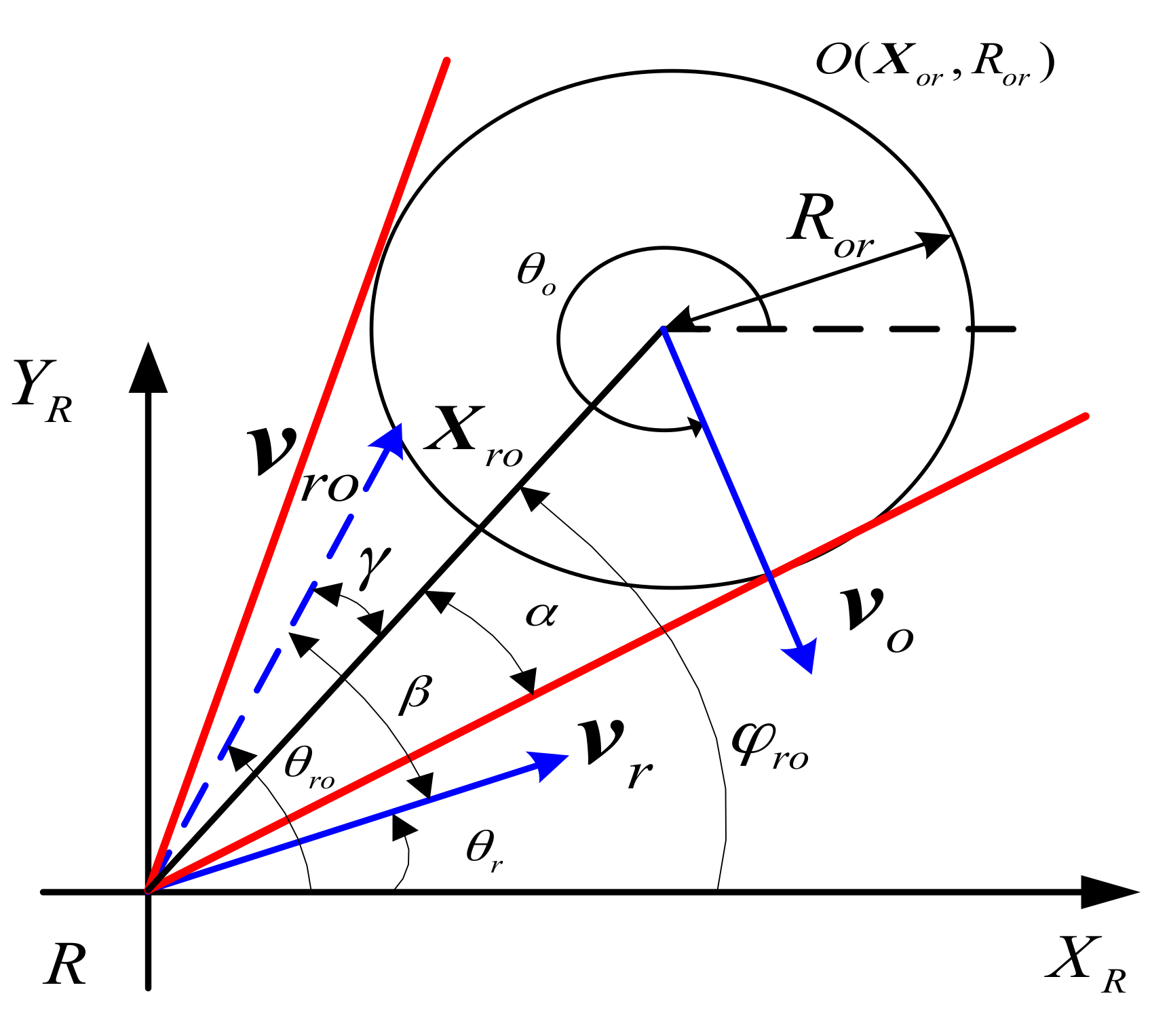
2.2. Process Analysis of Speed Collision Avoidance
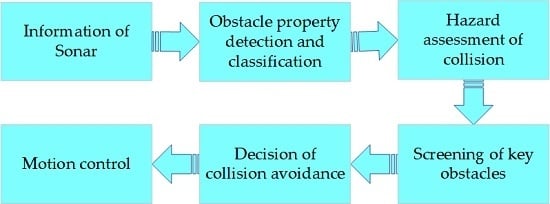
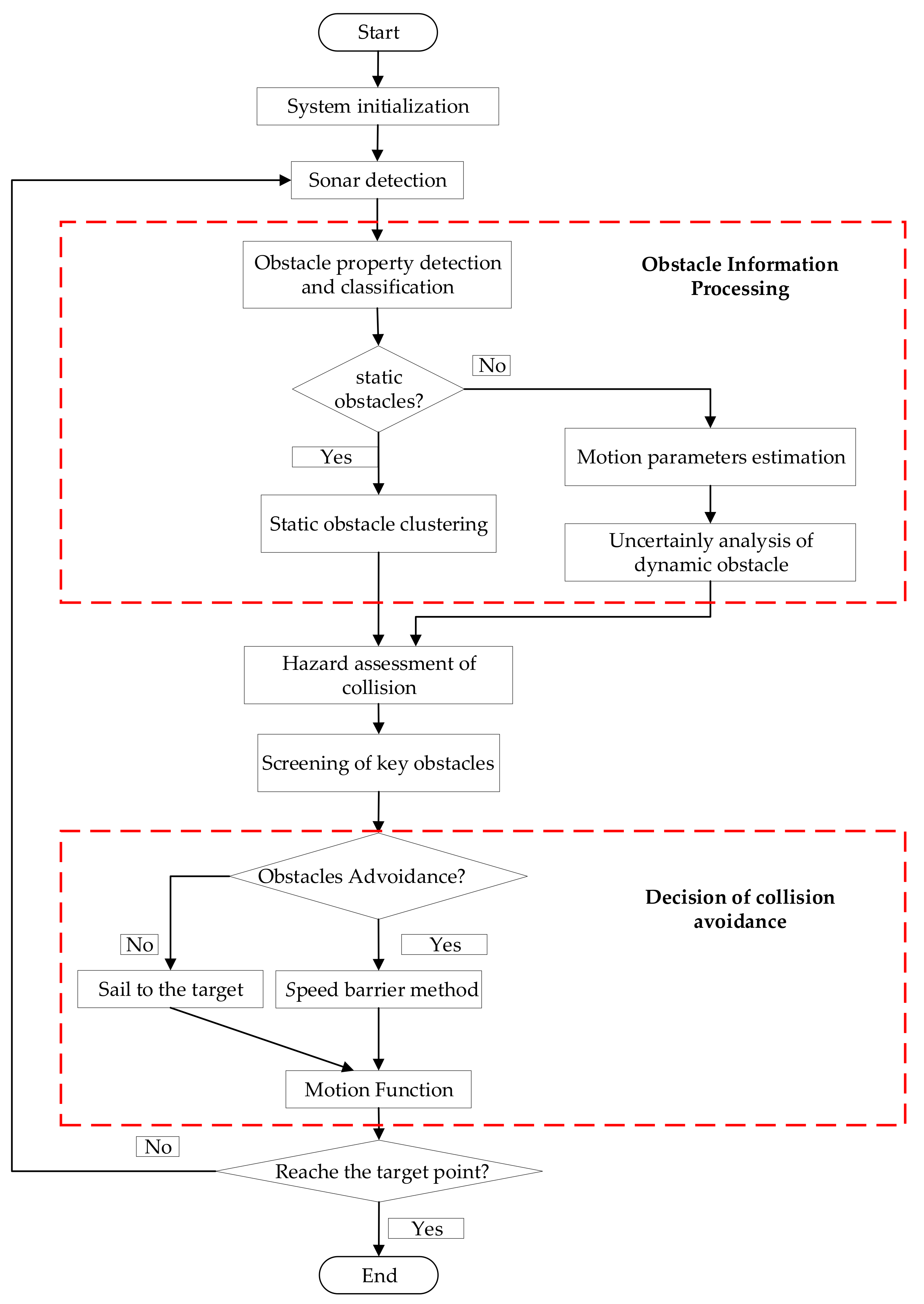
3. Dynamic Collision Avoidance Based on Improved Speed Obstacle Method
3.1. Obstacle Information Processing
3.1.1. Obstacle Property Detection and Classification
3.1.2. Static Obstacle Clustering Based on K-Means Algorithm
3.1.3. Motion Parameters Estimation and Uncertainly Analysis of Dynamic Obstacle
3.2. Hazard Assessment of Collision
3.3. Screening of Key Obstacles
3.4. The Avoidance Decision Based on the Improved Speed Barrier Method
3.4.1. The Risk of Speed
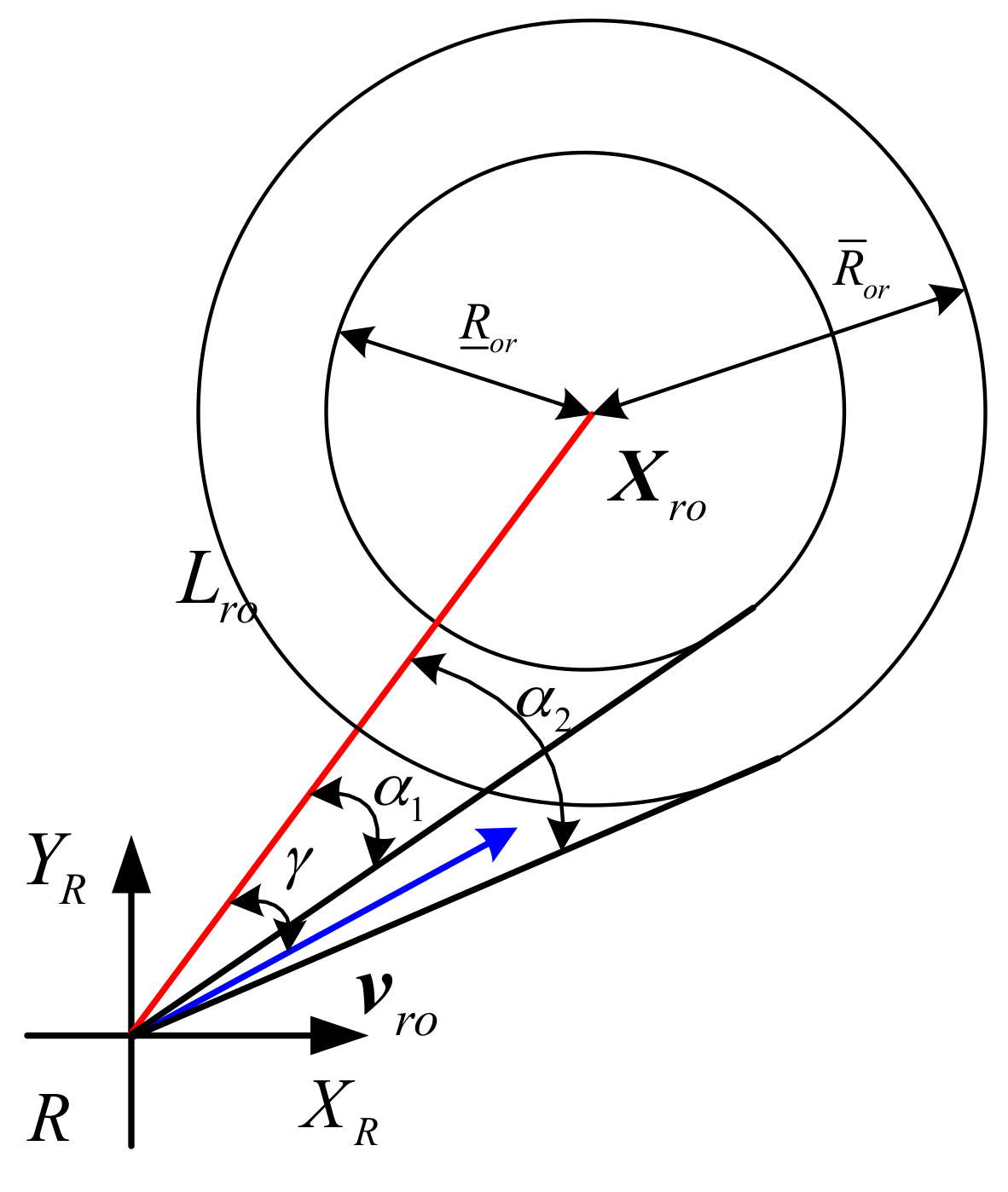
3.4.2. Velocity Space
3.4.3. Time to Collision
3.4.4. Optimization Objective Function
4. Simulations and Experimental Results
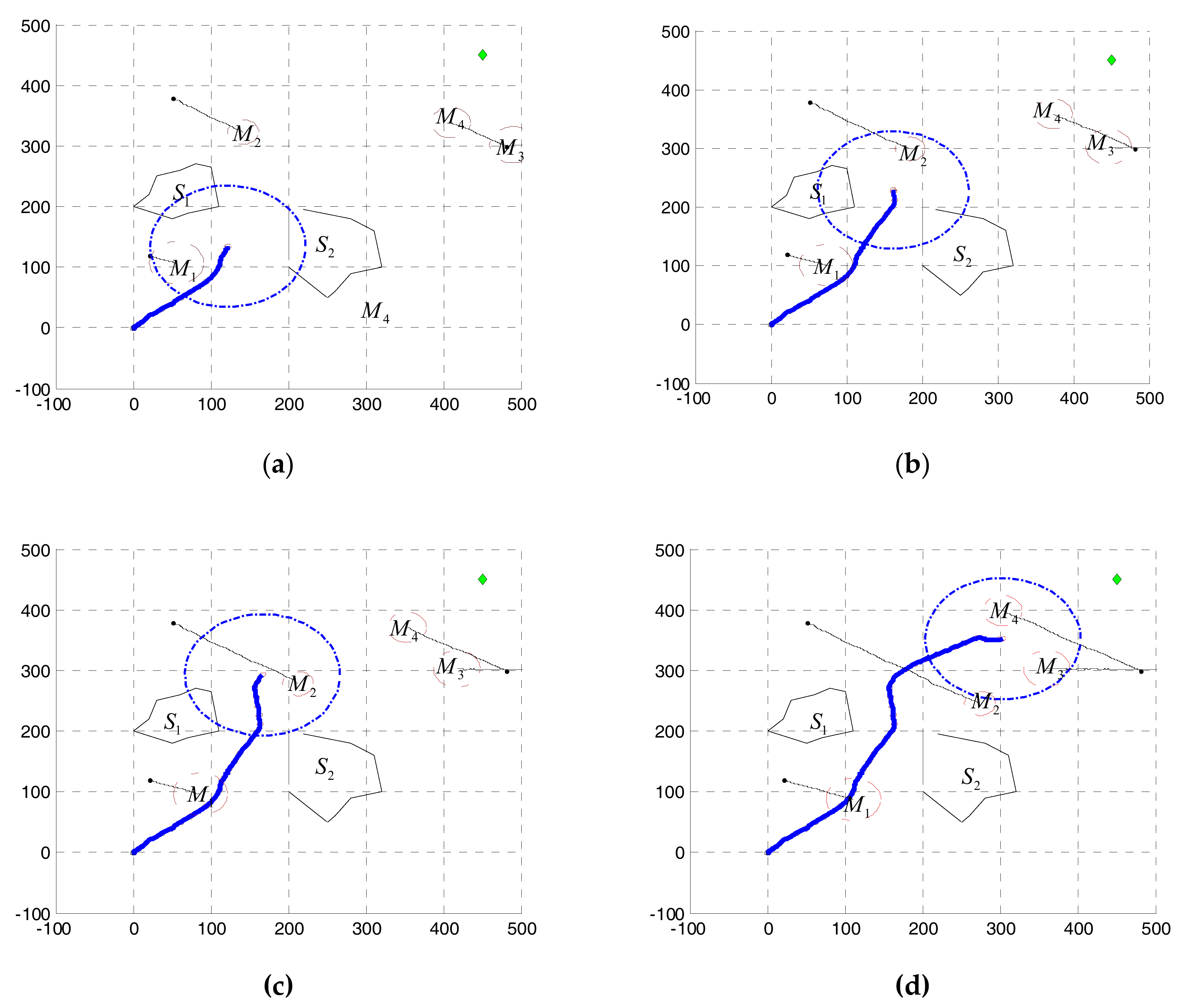
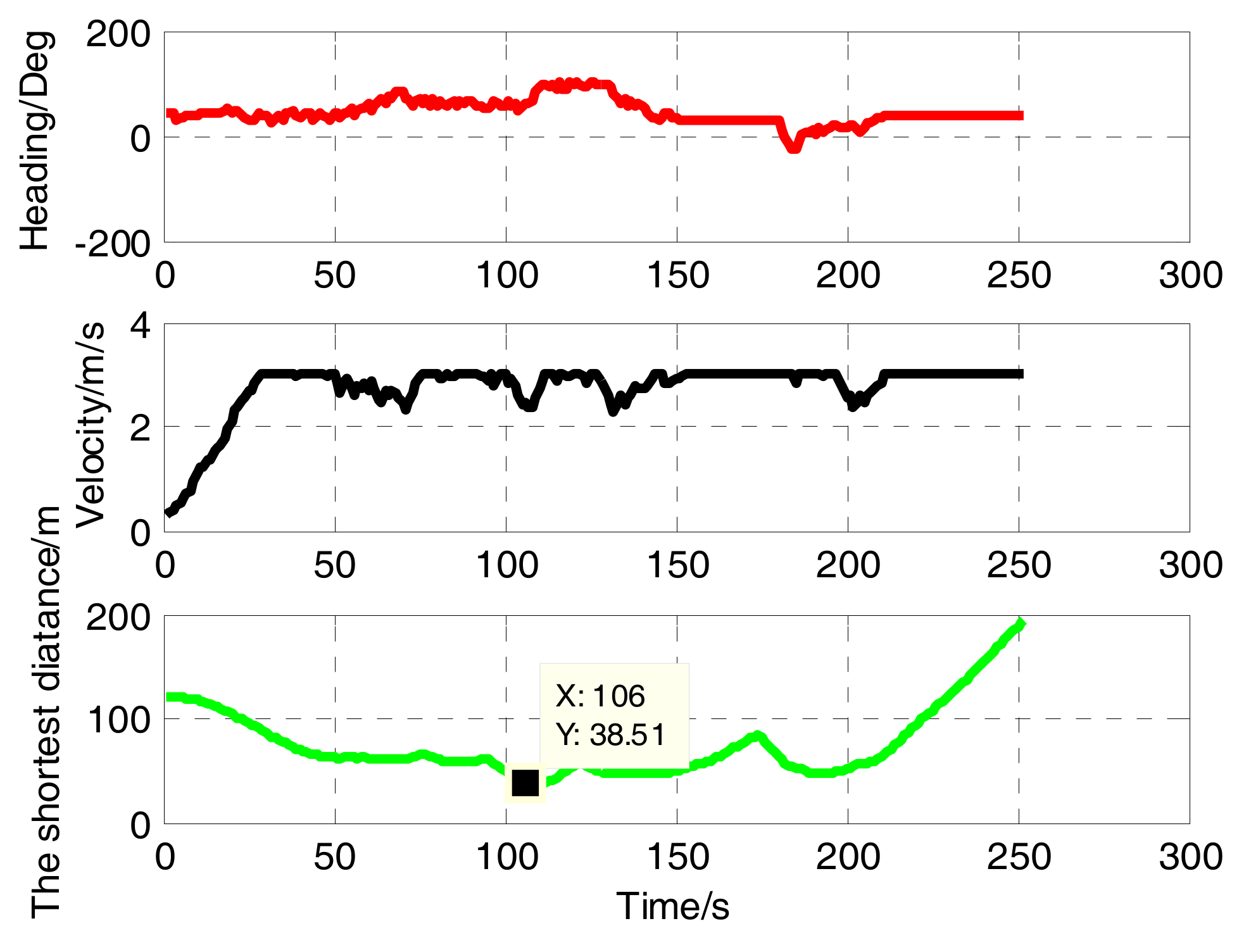
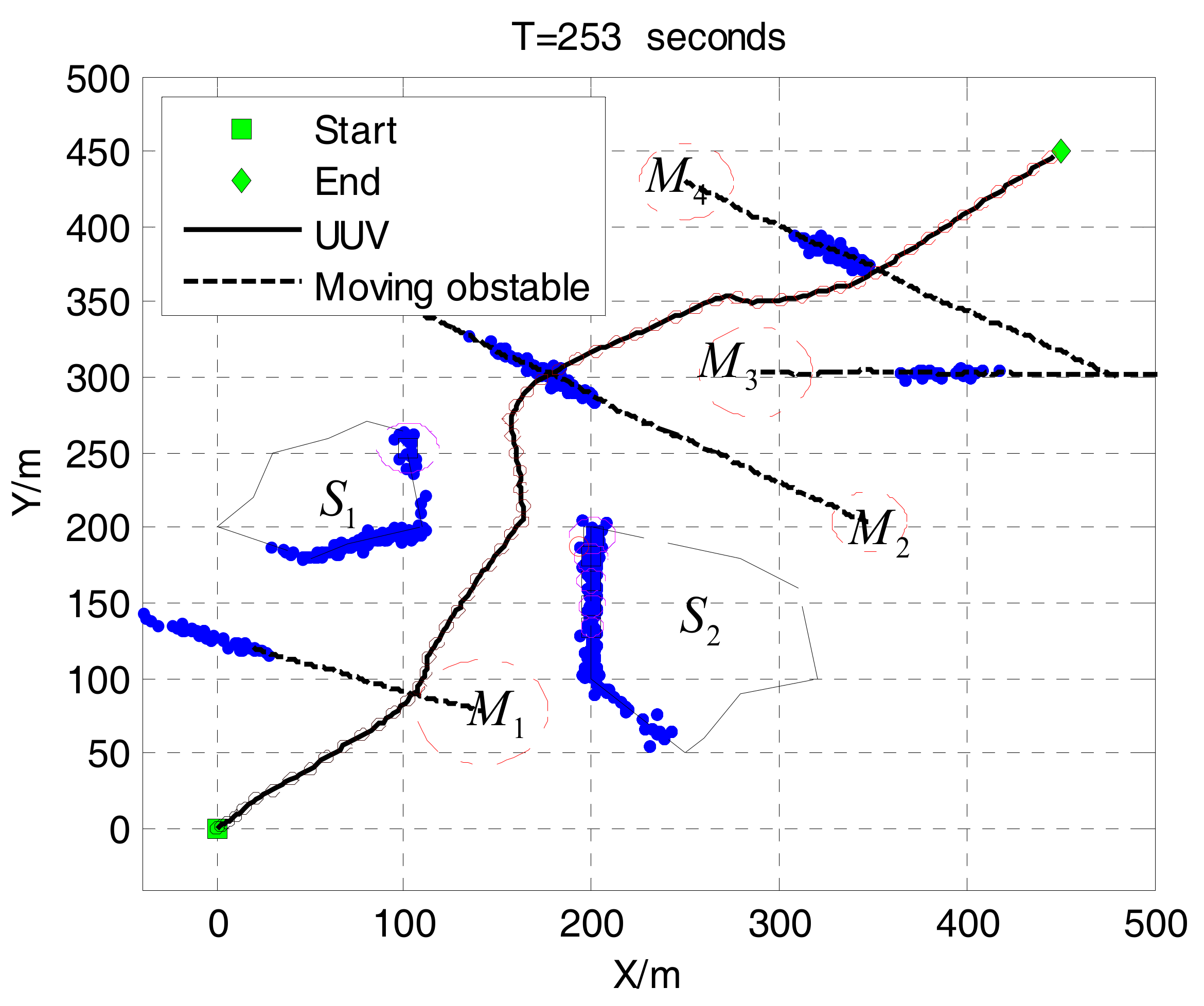
4.1. Simulation Results and Analysis
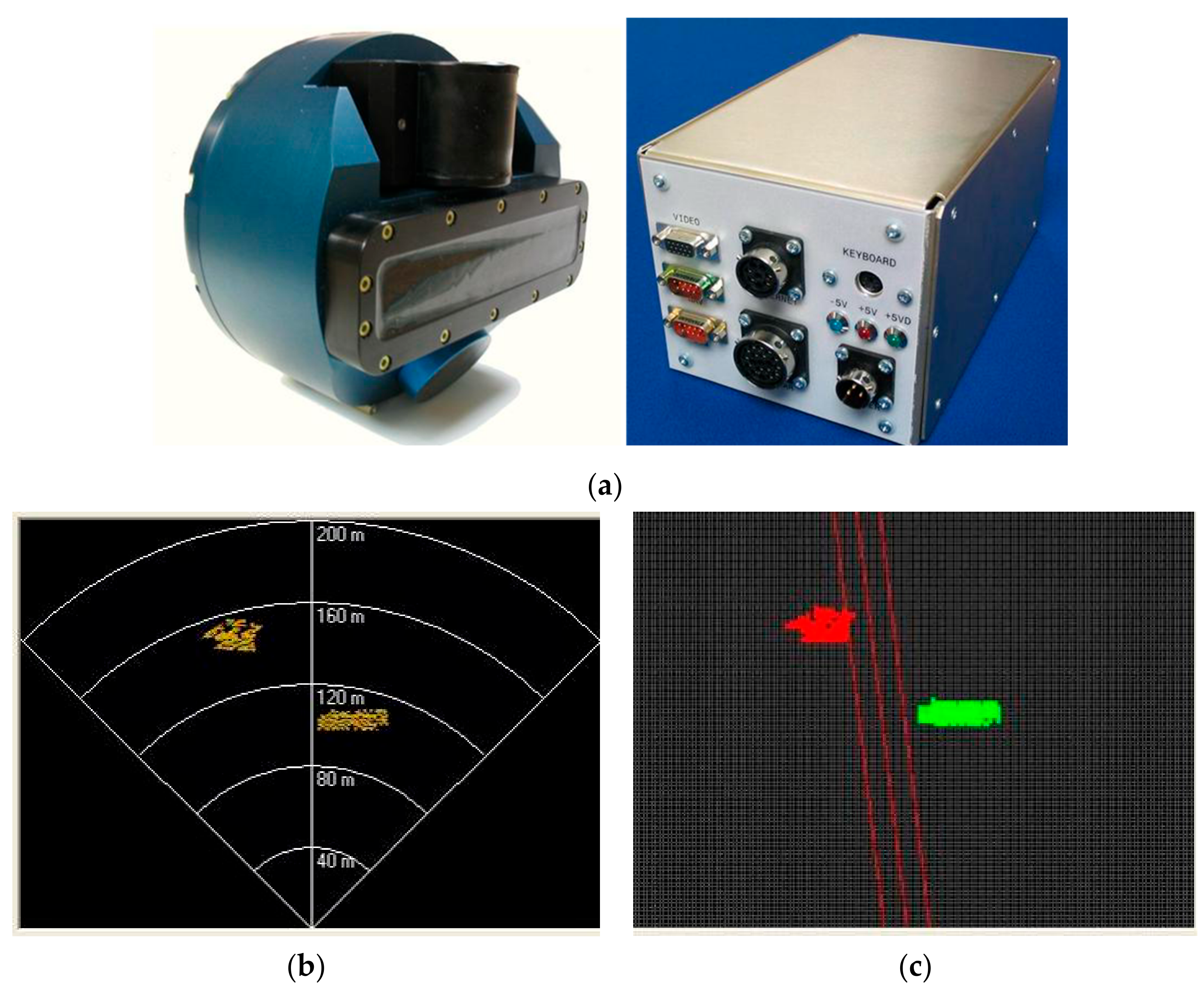
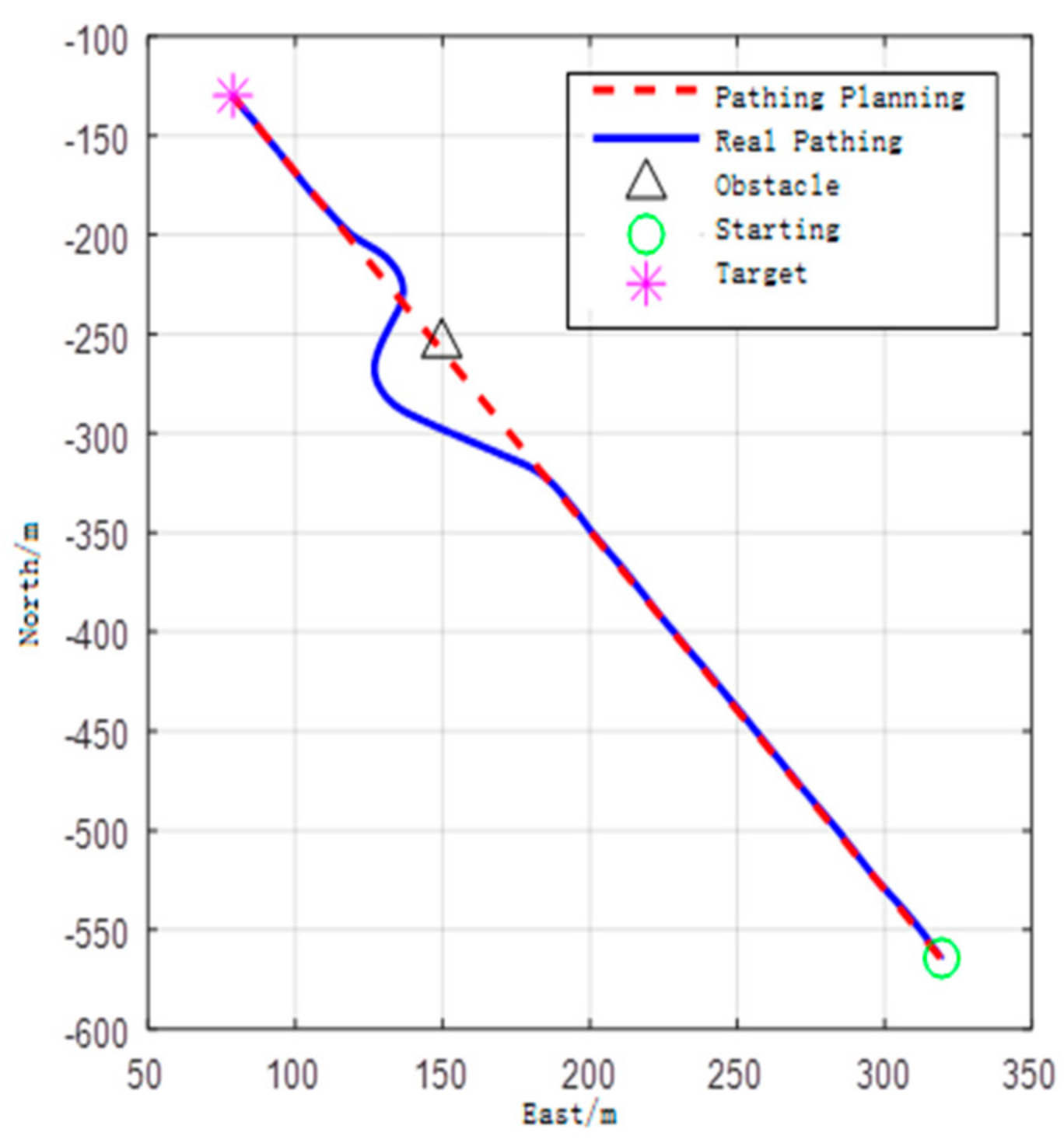
4.2. Experimental Results and Analysis
5. Discussion
- The introduction of collision risk and screening key obstacles can obtain the right moment to avoid collision.
- Large-scale static obstacle clustering treatment and common identification of moving and static barriers can reduce the complexity of dynamic collision avoidance, and effectively avoid large static obstacles.
- Based on the speed risk, the puffing strategy can solve the conservative collision avoidance problems caused by the direct expansion of obstacles.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Eren, F.; Pe’eri, S.; Thein, M.-W.; Rzhanov, Y.; Celikkol, B.; Swift, M.R. Position, orientation and velocity detection of unmanned underwater vehicles (UUVS) using an optical detector array. Sensors 2017, 17, 1741. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Chen, H.; Chen, T.; Yan, Z.; Ren, H. Research on coordinated robotic motion control based on fuzzy decoupling method in fluidic environments. Math. Probl. Eng. 2014. [Google Scholar] [CrossRef]
- Yan, Z.P.; Wang, L.; Zhang, W.; Zhou, J.; Wang, M. Polar grid navigation algorithm for unmanned underwater vehicles. Sensors 2017, 17, 1599. [Google Scholar] [CrossRef] [PubMed]
- Hurtos, N.; Cuf, X.; Petillot, Y.; Salvi, J. Fourier-based registrations for two-dimensional forward-looking sonar image mosaicing. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 5298–5305. [Google Scholar] [CrossRef]
- He, B.; Liang, Y.; Feng, X.; Nian, R.; Yan, T.; Li, M.; Zhang, S. AUV SLAM and experiments using a mechanical scanning forward-looking sonar. Sensors 2012, 12, 9386–9410. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hurtós, N.; Cufí, X.; Salvi, J. A novel blending technique for two-dimensional forward-looking sonar mosaicking. In Proceedings of the 2013 OCEANS-San Diego, San Diego, CA, USA, 23–27 September 2013; pp. 1–7. [Google Scholar] [CrossRef]
- Conti, R.; Meli, E.; Ridolfi, A.; Allotta, B. An innovative decentralized strategy for I-AUVs cooperative manipulation tasks. Robot. Auton. Syst. 2015, 72, 261–276. [Google Scholar] [CrossRef]
- Saravanakumar, S.; Asokan, T. Multipoint potential field method for path planning of autonomous underwater vehicles in 3D space. Intel. Serv. Robot. 2013, 6, 211–224. [Google Scholar] [CrossRef]
- Montiel, O.; Orozco, R.U.; Sepulveda, R. Path planning for mobile robots using bacterial potential field for avoiding static and dynamic obstacles. Expert Syst. Appl. 2015, 42, 5177–5191. [Google Scholar] [CrossRef]
- Tusseyeva, I.; Kim, S.G.; Kim, Y.G. 3D Global Dynamic window approach for navigation of autonomous underwater vehicles. Int. J. Fuzzy Log. Intell. Syst. 2013, 13, 91–99. [Google Scholar] [CrossRef]
- Rezaee, H.; Abdollahi, F. A Decentralized cooperative control scheme with obstacle avoidance for a team of mobile robots. IEEE. Trans. Ind. Electron. 2014, 61, 347–354. [Google Scholar] [CrossRef]
- Ali, F.; Kim, E.K.; Kim, Y.G. Type-2 fuzzy ontology-based semantic knowledge for collision avoidance of autonomous underwater vehicles. Inf. Sci. 2015, 295, 441–464. [Google Scholar] [CrossRef]
- Cheng, Y.; Zhang, W. Concise deep reinforcement learning obstacle avoidance for underactuated unmanned marine vessels. Neurocomputing 2017, 272, 63–73. [Google Scholar] [CrossRef]
- Han, D.; Nie, H.; Chen, J.; Chen, M. Dynamic obstacle avoidance for manipulators using distance calculation and discrete detection. Robot. Comp.-Integr. Manuf. 2018, 49, 98–104. [Google Scholar] [CrossRef]
- Lin, Y.; Saripalli, S. Sampling-based path planning for UAV collision avoidance. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1–14. [Google Scholar] [CrossRef]
- Fiorini, P.; Shiller, Z. Motion planning in dynamic enviroments using the relative velocity paradigm. In Proceedings of the IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993; pp. 560–565. [Google Scholar]
- Fiorini, P.; Shiller, Z. Motion planning in dynamic environments using velocity obstacles. Int. J Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Ivan, R.B.; Brual, S.; Karlvon, E.; Petr, S.; Wilhelm, K.; Armando, J.S.; Manhar, D.; Satyandra, K.G. Experimental evaluation of automatically-generated behaviors for USV operations. Ocean Eng. 2015, 106, 496–514. [Google Scholar]
- Yoshiaki, K.; Michael, T.W.; Dimitri, Z.; Terrance, L.H. Safe maritime autonomous navigation with colregs using velocity obstacles. IEEE J. Oceanic Eng. 2014, 39, 110–119. [Google Scholar]
- Shiller, Z.; Large, S.; Seckavat, F. Motion planning in dynamic environments: obstacles moving along arbitrary trajectories. In Proceedings of the IEEE International Conference on Robotics and Automation, Seoul, South Korea, 21–26 May 2001; pp. 3716–3721. [Google Scholar]
- Large, F.; Laugier, C.; Shiller, Z. Navigation among moving obstacles using the NLVO: Principles and applications to intelligent vehicles. Auton. Robot. 2005, 19, 159–171. [Google Scholar] [CrossRef]
- Kluge, B. Recursive agent modeling with probabilistic velocity obstacles for mobile robot navigation among humans. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 27–31 October 2003; pp. 376–381. [Google Scholar]
- Jamie, S.; Jurvanden, B.; Stephen, J.G.; Dinesh, M. The hybrid reciprocal velocity obstacles. IEEE Trans. Robot. 2011, 27, 696–706. [Google Scholar]
- Yoshiaki, K.; Michael, T.W.; Dimitri, Z.; Terrance, L.H. Safe maritime navigation with COLREGS using velocity obstacles. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4728–4734. [Google Scholar]
- Jurvanden, B.; Mark, O. Planning time-minimal safe paths amidst unpredictably moving obstacles. The Int. J. Robotics Res. 2008, 27, 1274–1294. [Google Scholar]
- Ahmad, A.; Robert, B. Improving the Velocity Obstacle Approach for Obstacle Avoidance in Indoor Environments. In Proceedings of the 2014 UKACC International Conference on Control, Loughborough, UK, 9–11 July 2014. [Google Scholar]
- Jing, X.J. Behavior dynamics based motion planning of mobile robots in uncertain dynamic environments. Robot. Auton. 2005, 53, 99–123. [Google Scholar] [CrossRef]
- Yamamoto, M.; Shimada, M.; Mobli, A. On-line navigation of mobile robot under the existence of dynamically moving multiple obstacles. In Proceedings of the IEEE International Symposium on Assembly and Task Planning, Fukuoka, Japan, 29 May 2001. [Google Scholar]
- Kim, M.; Oh, J.J. Development of an optimal velocity selection method with velocity obstacle. J. Mech. Sci. Tech. 2015, 29, 3475–3487. [Google Scholar] [CrossRef]
- Tapas, K.; David, M.M.; Nathan, S.N.; Christine, D.P.; Ruth, S.; Angela, Y.W. An efficient k-means clustering algorithm: Analysis and implementation. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 881–892. [Google Scholar]
- Miura, J.; Shirai, K. Modeling motion uncertainty of moving obstacles for robot motion planning. In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000. [Google Scholar]
- Ahn, J.H.; Rhee, K.P.; You, Y.J. A study on the collision avoidance of a ship using neural networks and fuzzy logic. Appl. Ocean Res. 2012, 37, 162–173. [Google Scholar] [CrossRef]




© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Wei, S.; Teng, Y.; Zhang, J.; Wang, X.; Yan, Z. Dynamic Obstacle Avoidance for Unmanned Underwater Vehicles Based on an Improved Velocity Obstacle Method. Sensors 2017, 17, 2742. https://doi.org/10.3390/s17122742
Zhang W, Wei S, Teng Y, Zhang J, Wang X, Yan Z. Dynamic Obstacle Avoidance for Unmanned Underwater Vehicles Based on an Improved Velocity Obstacle Method. Sensors. 2017; 17(12):2742. https://doi.org/10.3390/s17122742
Chicago/Turabian StyleZhang, Wei, Shilin Wei, Yanbin Teng, Jianku Zhang, Xiufang Wang, and Zheping Yan. 2017. "Dynamic Obstacle Avoidance for Unmanned Underwater Vehicles Based on an Improved Velocity Obstacle Method" Sensors 17, no. 12: 2742. https://doi.org/10.3390/s17122742
APA StyleZhang, W., Wei, S., Teng, Y., Zhang, J., Wang, X., & Yan, Z. (2017). Dynamic Obstacle Avoidance for Unmanned Underwater Vehicles Based on an Improved Velocity Obstacle Method. Sensors, 17(12), 2742. https://doi.org/10.3390/s17122742