Mathematical Model for Localised and Surface Heat Flux of the Human Body Obtained from Measurements Performed with a Calorimetry Minisensor


Abstract
:1. Introduction
2. Materials and Methods
2.1. Calorimetry Minisensor
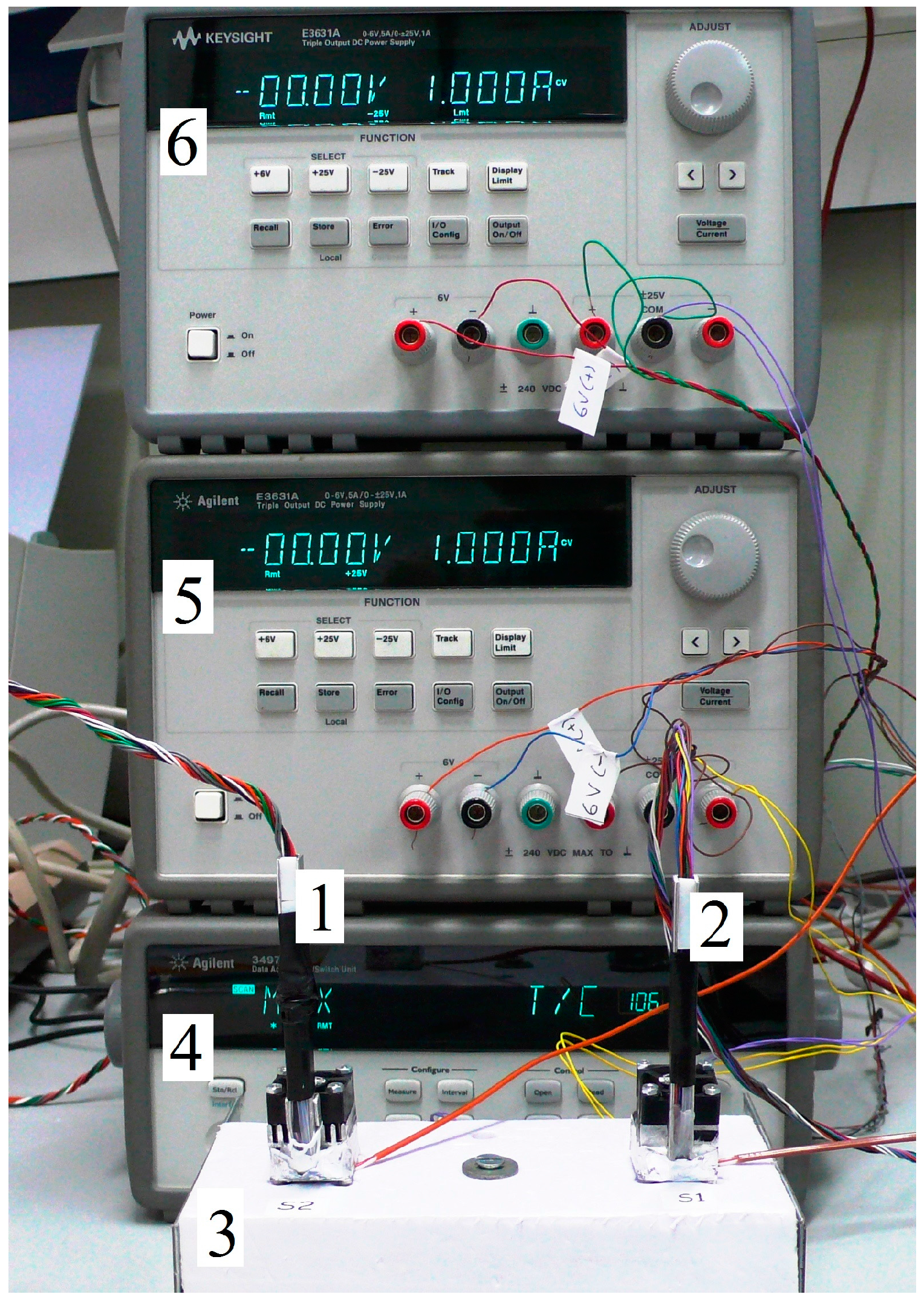
2.2. Calibration
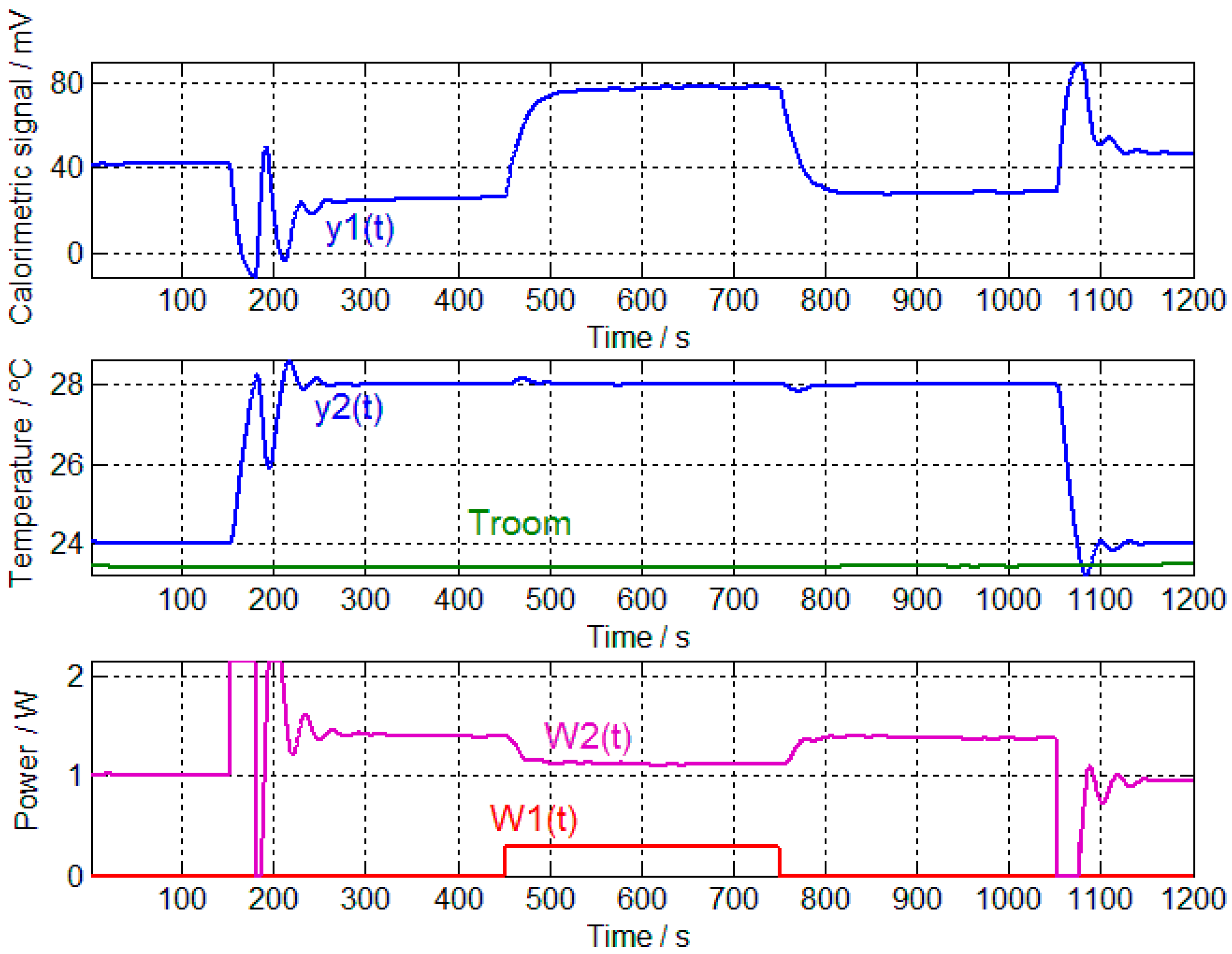
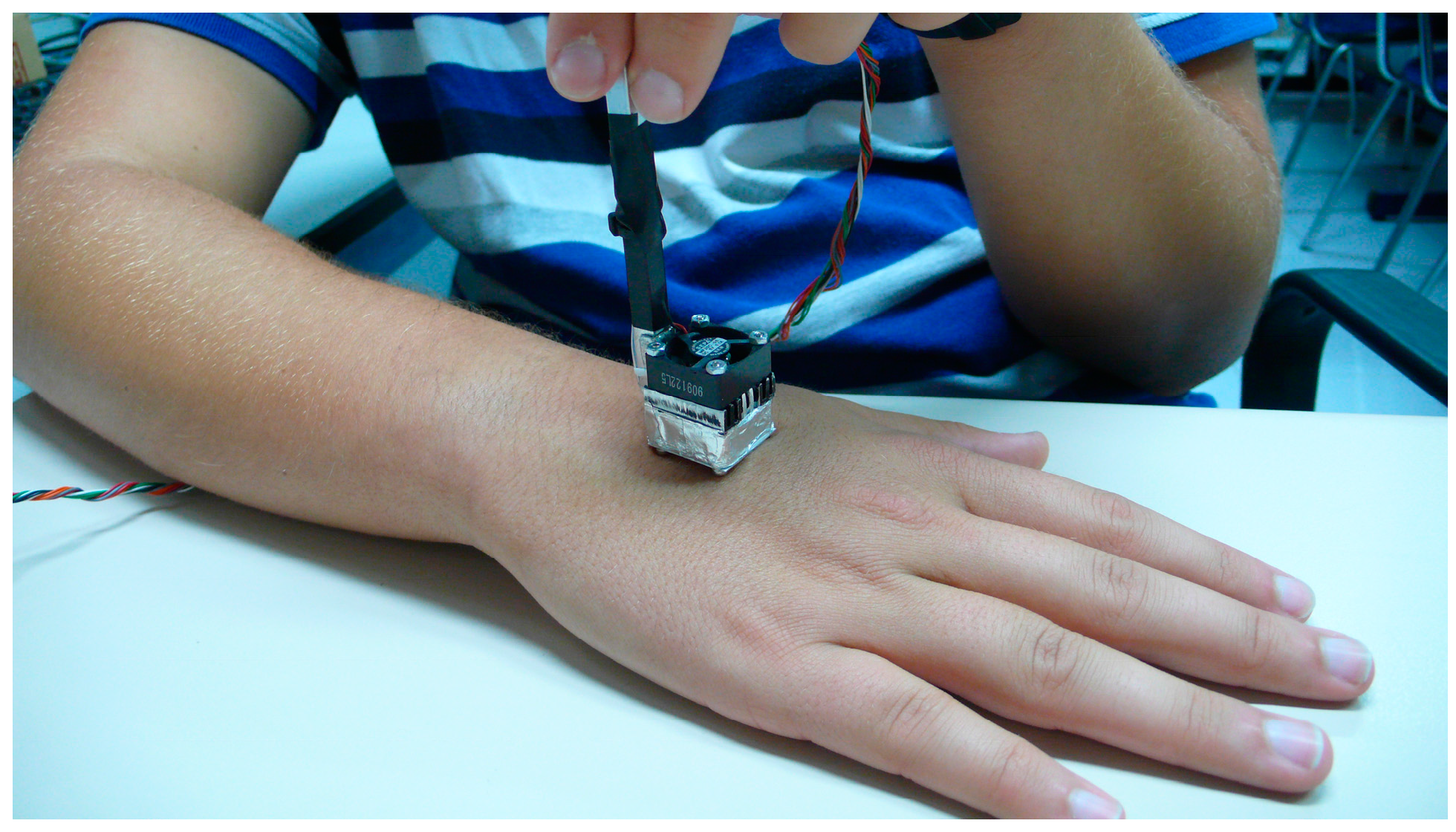
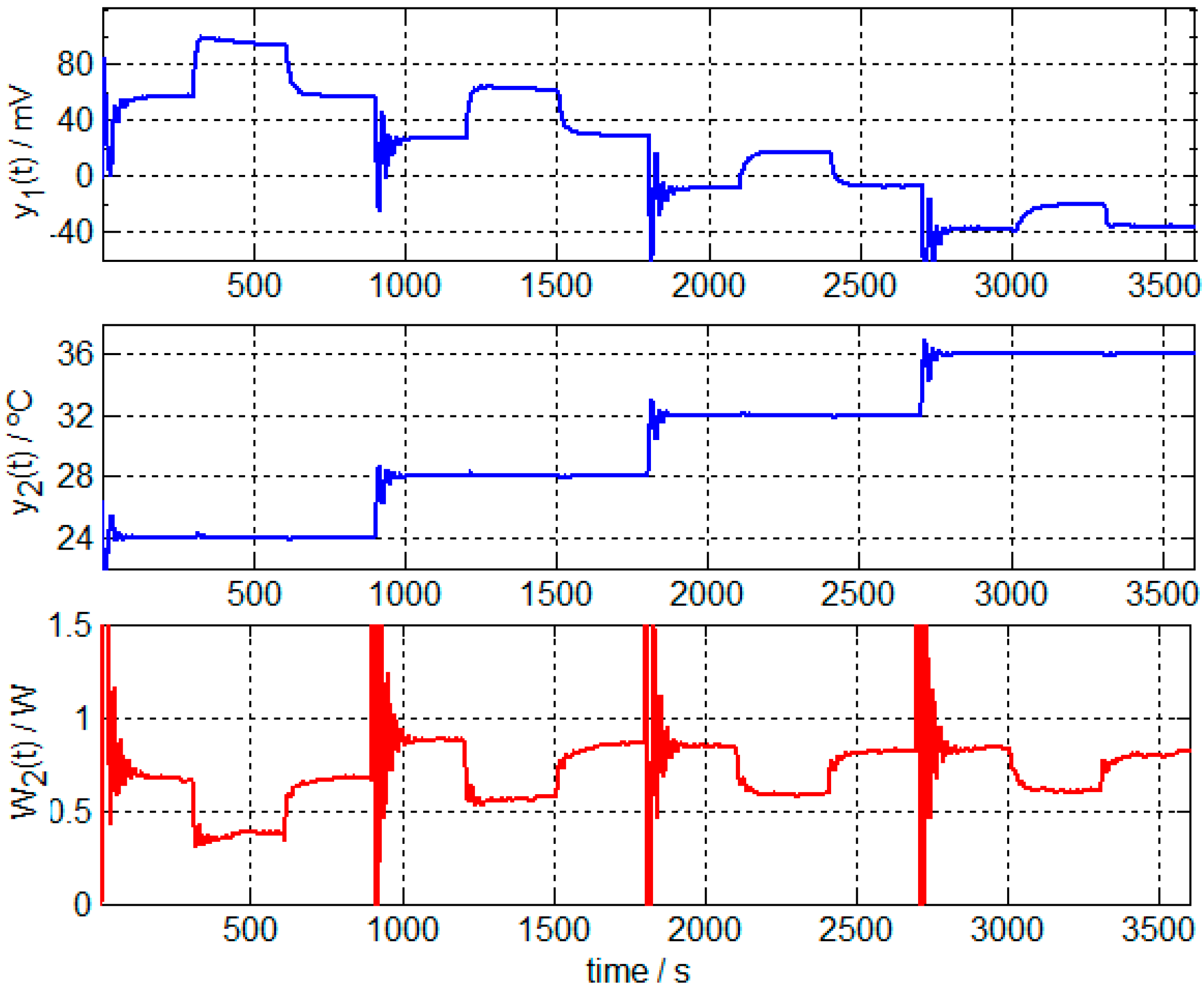
2.3. Measurement Method
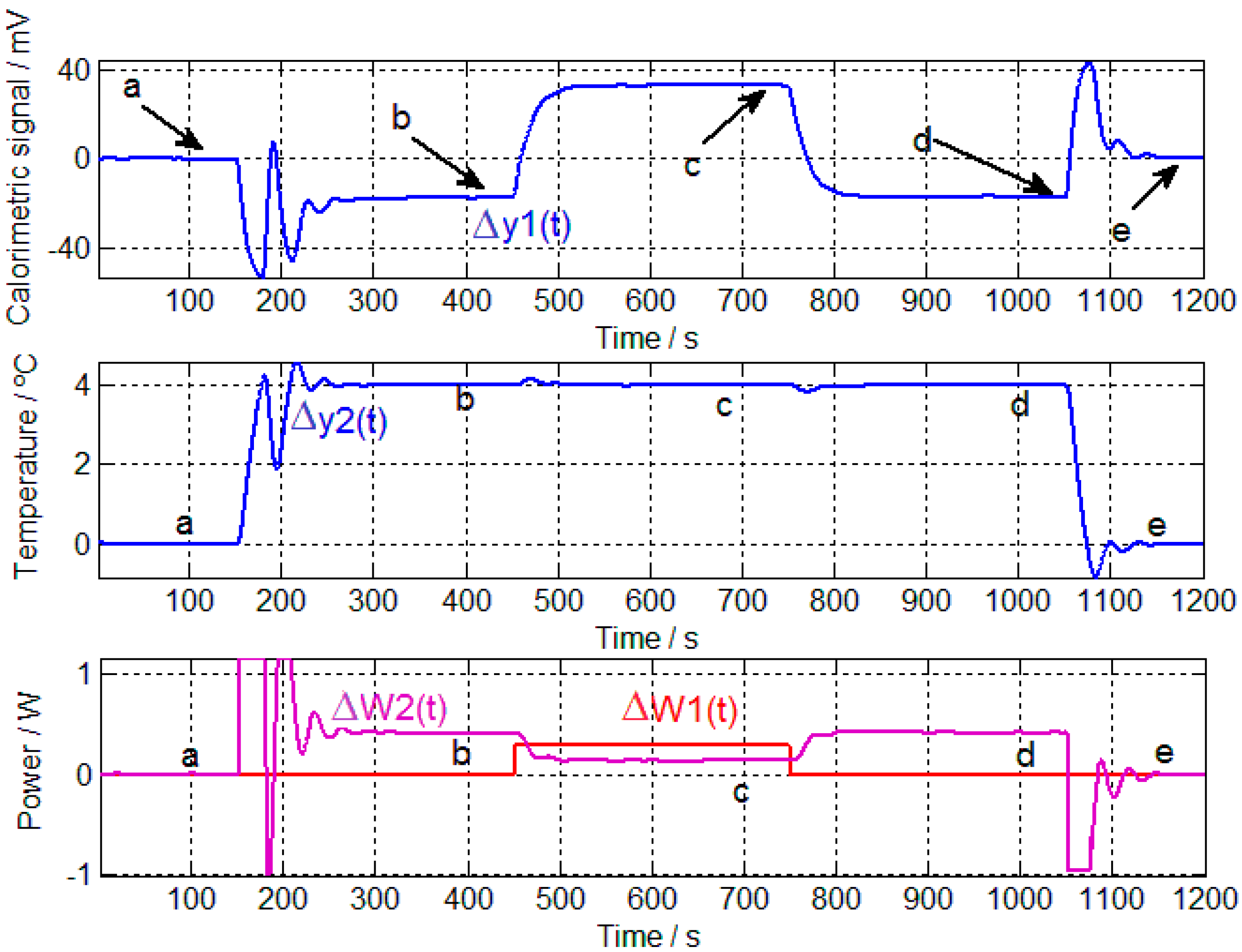
2.4. Mathematical Model of the Surface Heat Dissipation of the Human Body
3. Results
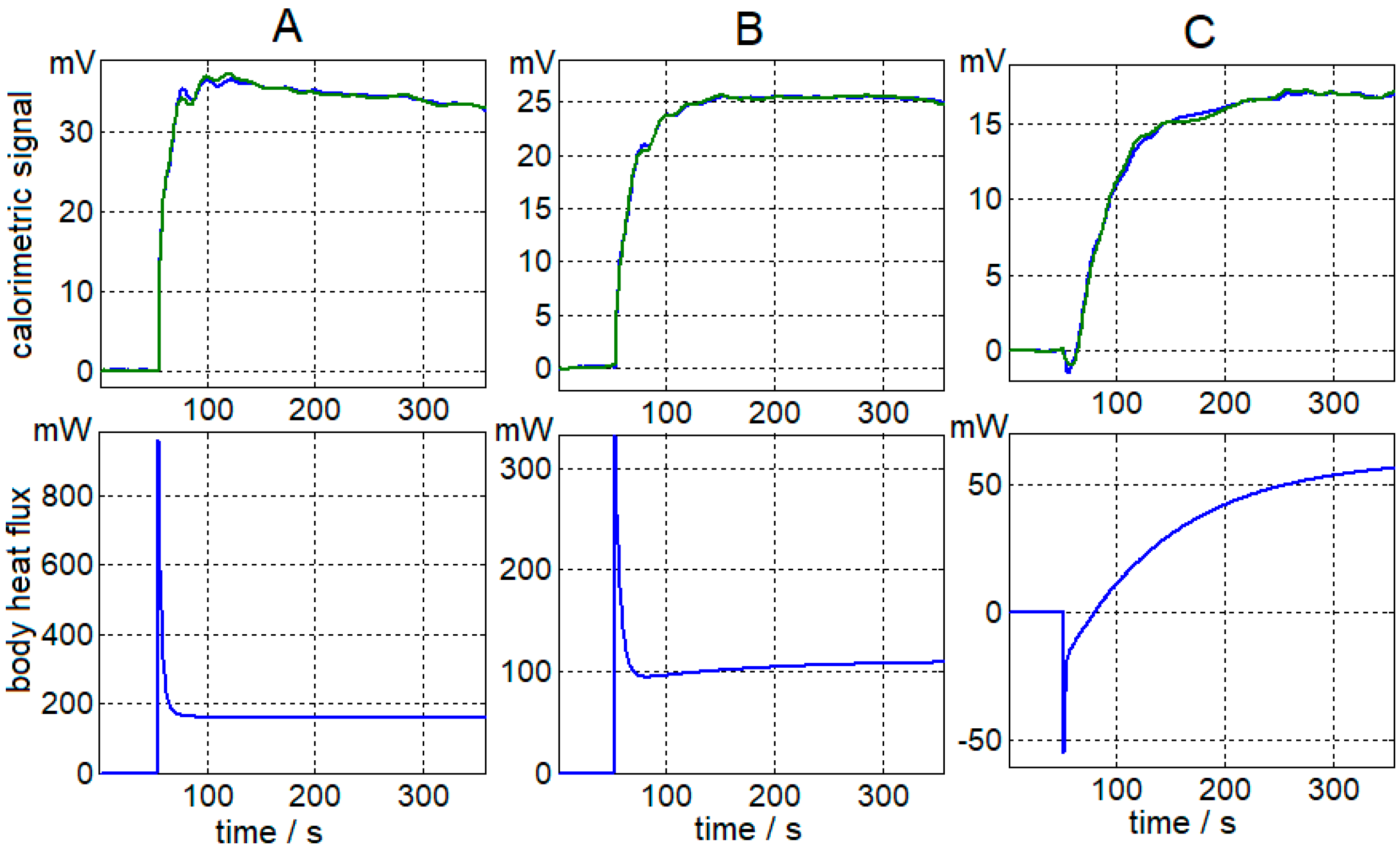
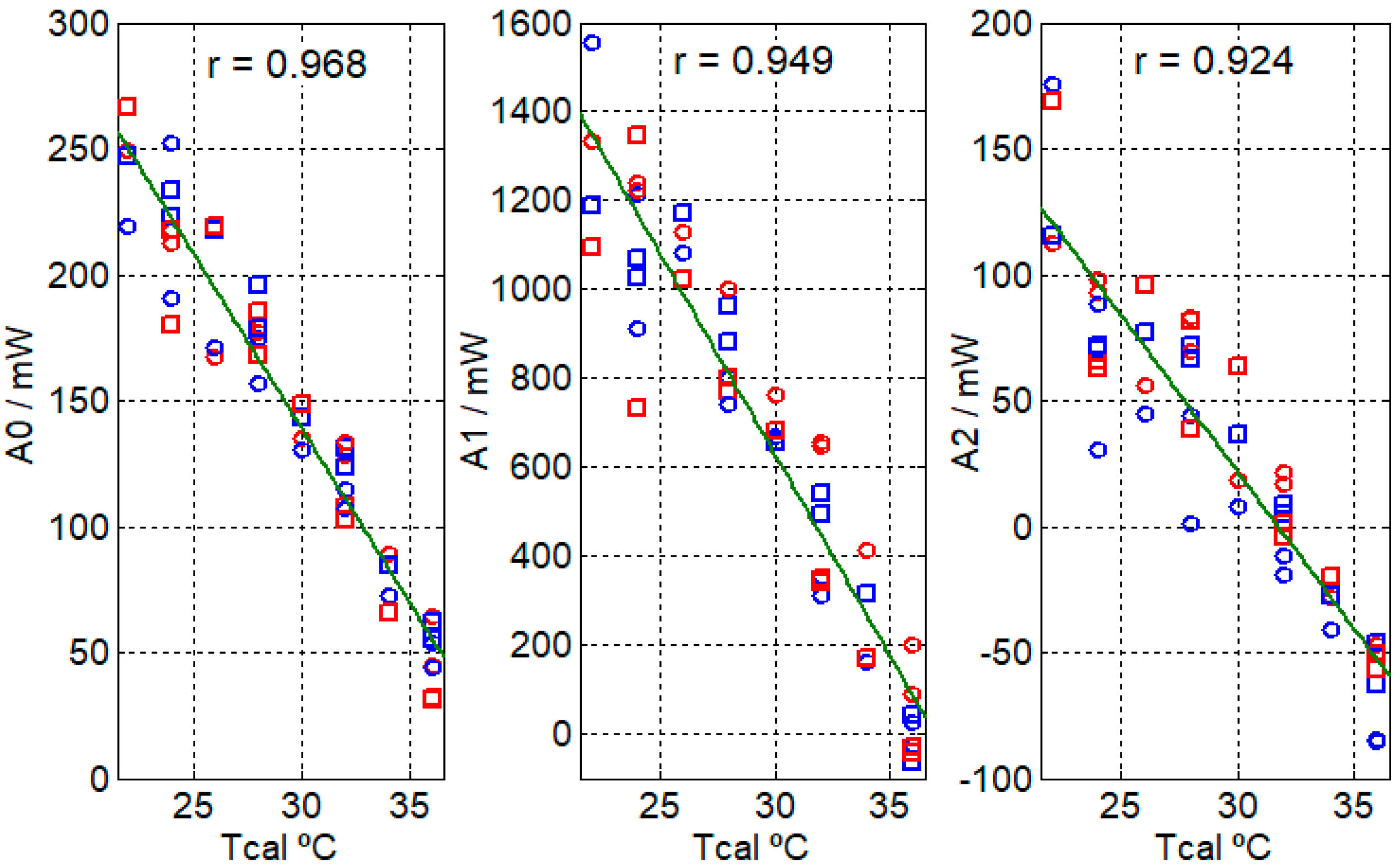
3.1. Surface Heat Dissipation of the Human Body
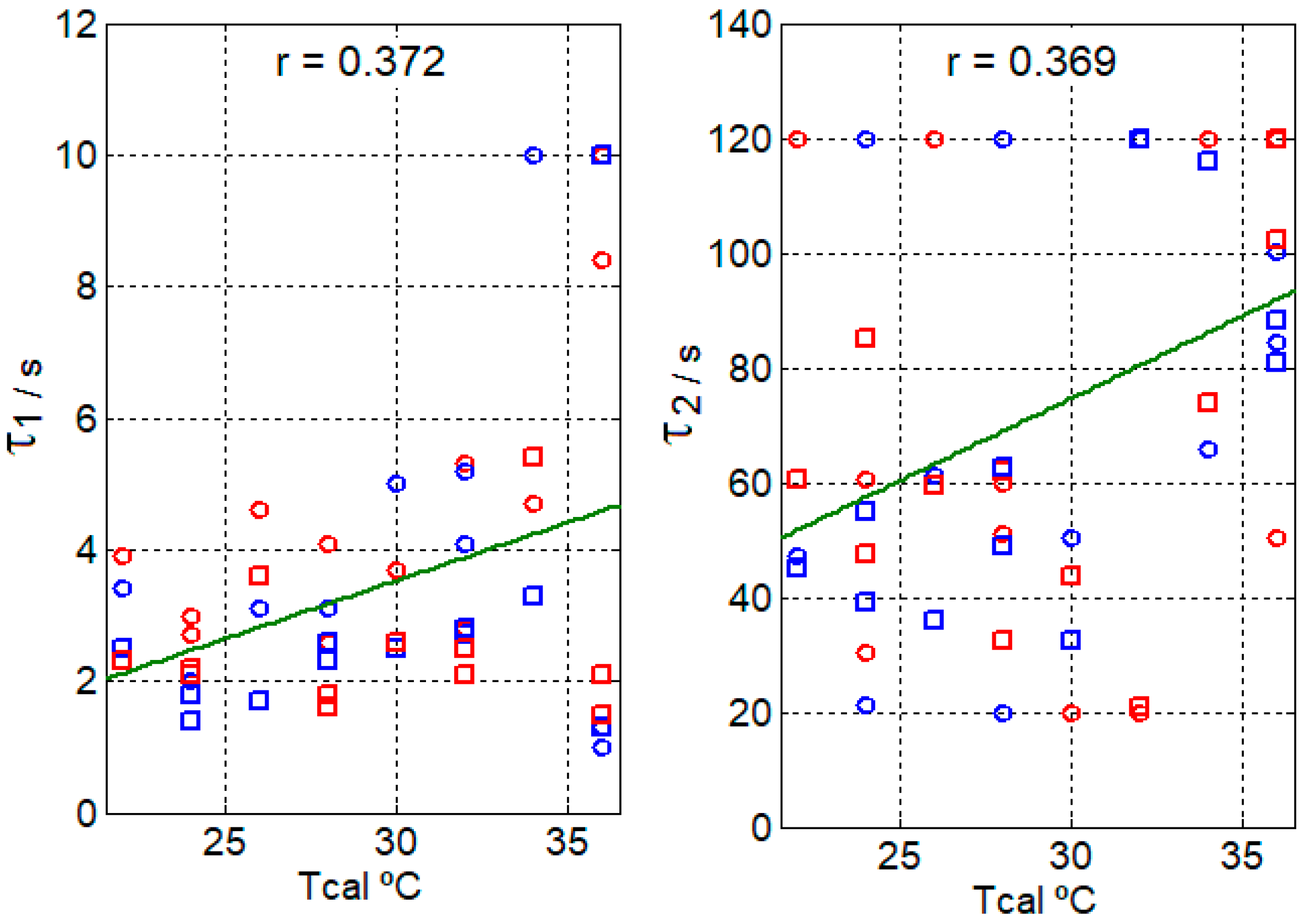
3.2. Thermal Resistance of the Sensor and the Human Body
4. Discussion
Author Contributions
Conflicts of Interest
References
- Wendlandt, W.W. Thermal Methods of Analysis; John Wiley and Sons: New York, NY, USA, 1974. [Google Scholar]
- Sabbah, R.; Xu-wu, A.; Chickos, J.S.; Planas Leitao, M.L.; Roux, M.V.; Torres, L.A. Reference materials for calorimetry and differential thermal analysis. Thermochim. Acta 1999, 331, 93–204. [Google Scholar] [CrossRef]
- Socorro, F.; de la Nuez, I.; Rodriguez de Rivera, M. Calibration of isothermal heat conduction calorimeters: Case of flow calorimeters. Measurement 2003, 33, 241–250. [Google Scholar] [CrossRef]
- Rodríguez de Rivera, M.; Socorro, F. Signal processing and uncertainty in an isothermal titration calorimeter. J. Therm. Anal. Calorim. 2007, 88, 745–750. [Google Scholar] [CrossRef]
- Handbook of Thermal Analysis and Calorimetry: Principles and Practice; Brown, M.E. (Ed.) Elsevier Science: Amsterdam, The Netherlands, 1998; Volume 1. [Google Scholar]
- Hansen, L.D. Toward a standard nomenclature for calorimetry. Thermochim. Acta 2001, 371, 19–22. [Google Scholar] [CrossRef]
- Socorro, F.; Rodríguez de Rivera, M. Development of a calorimetric sensor for medical application. Part I.—Operating model. J. Therm. Anal. Calorim. 2010, 99, 799–802. [Google Scholar] [CrossRef]
- Jesus, C.; Socorro, F.; Rodríguez de Rivera, M. Development of a calorimetric sensor for medical application. Part II.—Identification and Simulation. J. Therm. Anal. Calorim. 2013, 113, 1003–1007. [Google Scholar] [CrossRef]
- Jesus, C.; Socorro, F.; Rodríguez de Rivera, M. Development of a calorimetric sensor for medical application. Part III.—Operating methods and applications. J. Therm. Anal. Calorim. 2013, 113, 1009–1013. [Google Scholar] [CrossRef]
- Jesus, C.; Socorro, F.; Rodriguez de Rivera, H.J.; Rodríguez de Rivera, M. Development of a calorimetric sensor for medical application. Part IV.—Deconvolution of the calorimetric signal. J. Therm. Anal. Calorim. 2014, 116, 151–155. [Google Scholar] [CrossRef]
- Socorro, F.; Rodriguez de Rivera, P.J.; Rodríguez de Rivera, M. Calorimetric minisensor for the localized measurement of surface heat dissipated from the human body. Sensors 2016, 16, 1864. [Google Scholar] [CrossRef] [PubMed]
- Lahiri, B.B.; Bagavathiaappan, S.; Jayakumar, T.; Philip, J. Medical applications of infrared thermography: A review. Infrared Phys. Technol. 2012, 55, 221–235. [Google Scholar] [CrossRef]
- Lvingstone, S.; Nolan, R.; Frim, J.; Reed, L.; Limmer, R. A thermographic study of the effect of body composition and ambient temperature on the accuracy of mean skin temperature calculations. Eur. J. Appl. Physiol. Occup. Physiol. 1987, 56, 120–125. [Google Scholar] [CrossRef]
- Haidar, S.G.; Charity, R.M.; Bassi, R.S.; Nicolai, P.; Singh, B.K. Knee skin temperature following uncomplicated total knee replacement. Knee 2006, 13, 422–426. [Google Scholar] [CrossRef] [PubMed]
- Mehra, A.; Langkamer, V.G.; Day, A.; Harris, S.; Spencer, R.F. Creative protein and skin temperature post total knee replacement. Knee 2005, 12, 297–300. [Google Scholar] [CrossRef] [PubMed]
- Rajapakse, C.; Grennan, D.M.; Jones, C.; Wilkinson, L.; Jayson, M. Thermography in the assessment of peripheral joint inflammation—A re-evaluation. Rheumatol Rehabil. 1981, 20, 81–87. [Google Scholar] [CrossRef] [PubMed]
- Denoble, A.E.; Hall, N.; Pieper, C.F.; Kraus, V.B. Patellar skin surface temperature by thermography reflects knee osteoarthritis severity. Clin. Med. Insights Arthritis Musculosketet. Disord. 2010, 3, 69–75. [Google Scholar] [CrossRef] [PubMed]
- Rokita, E.; Rok, T.; Taton, G. Application of thermography for the assessment of allergen-induced skin reactions. Med. Phys. 2011, 38, 765–772. [Google Scholar] [CrossRef] [PubMed]
- Vecchio, P.C.; Adebajo, A.O.; Chard, M.D.; Thomas, P.P.; Hazleman, B.L. Thermography of frozen sholder and rotator cuff tendinitis. Clin. Rheumatol. 1992, 11, 382–384. [Google Scholar] [CrossRef] [PubMed]
- Miyakoshi, N.; Itoi, E.; Sato, K.; Suzuki, K.; Matsuura, H. Skin temperature of the shoulder: circadian rhythms in normal and pathologic shoulders. J. Shoulder Elb. Surg. 1998, 7, 625–628. [Google Scholar] [CrossRef]
- Nelder, J.A.; Mead, C. A simplex method for function minimization. Comput. J. 1965, 7, 308–313. [Google Scholar] [CrossRef]
- Optimization ToolboxTM User’s Guide; 5th printing; Revised for Version 3.0 (Release 14); The MathWorks, Inc.: Natic, MA, USA, June 2004.
- Maniar, N.; Bach, A.J.E.; Stewart, I.B.; Costello, J.T. The effect of using different regions of interest on local and mean skin temperature. J. Therm. Biol. 2015, 49–50, 33–38. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Werner, J.; Buse, M. Temperature profiles with respect to inhomogeneity and geometry of the human body. J. Appl. Physiol. 1988, 65, 1110–1118. [Google Scholar] [PubMed]
- Shitzer, A.; Stroschein, L.A.; Gonzalez, R.R.; Pandolf, K. Lumped-parameter tissue temperature-blood perfusion model of a cold-stress fingertip. J. Appl. Physiol. 1996, 80, 1829–1834. [Google Scholar] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S1 Sensor | S2 Sensor | |
|---|---|---|
| K1 | 117.98 ± 0.33 mVW−1 | 132.40 ± 0.48 mVW−1 |
| K2 | −51.33 ± 0.50 mVW−1 | −42.22 ± 0.75 mVW−1 |
| K3 | 8.98 ± 0.21 KW−1 | 8.67 ± 0.20 KW−1 |
| K4 | 11.92 ± 0.18 KW−1 | 9.82 ± 0.15 KW−1 |
| τ1 | 80.8 s | 84.0 s |
| τ2 | 9.5 s | 8.2 s |
| τ1* | 64.4 s | 73.5 s |
| τ2* | 108.2 s | 96.1 s |
| τ3* | 0.0 s | 0.0 s |
| τ4* | 22.2 s | 18.4 s |
| σy1 | 0.076 mV | 0.066 mV |
| σy2 | 1.94 mK | 2.69 mK |
| N | 1200 points | 1200 points |
| Tcal/°C | A0/mW | A1/mW | A2/mW | τ1/s | τ2/s | Error Equation (7) (%) | Wmean/mW |
|---|---|---|---|---|---|---|---|
| 24 | 193.7 | 1156.4 | 101.0 | 2.0 | 21.2 | 1.29 | 207.3 |
| 28 | 156.6 | 779.3 | 25.4 | 3.1 | 20.0 | 1.03 | 163.3 |
| 32 | 110.4 | 244.6 | −21.6 | 5.2 | 120.0 | 0.78 | 103.3 |
| 36 | 60.0 | −35.6 | −79.0 | 1.0 | 100.2 | 0.60 | 28.9 |
| α mW | β mW °C−1 | Error σ (Equation (4)) mW | Max. Deviation mW | |
|---|---|---|---|---|
| A0 | 556.21 | −13.91 | 2.38 | 41.86 |
| A1 | 3342.53 | −90.49 | 20.06 | 437.88 |
| A2 | 393.95 | −12.41 | 3.43 | 65.26 |
| Measurement | Subject | Slope of A0 mWK−1 | RT KW−1 | Rbody KW−1 | Thermal Conductivity Wm−1K−1 |
|---|---|---|---|---|---|
| Table 2 | 1 | −11.2 | 89.3 | 77.3 | 0.32 |
| Table 3 | 1 | −13.9 | 71.9 | 59.4 | 0.42 |
| Figure 8 | 2 | −16.2 | 61.7 | 49.3 | 0.50 |
| Figure 8 | 2 | −16.1 | 62.1 | 50.1 | 0.50 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Socorro, F.; Rodríguez de Rivera, P.J.; Rodríguez de Rivera, M.; Rodríguez de Rivera, M. Mathematical Model for Localised and Surface Heat Flux of the Human Body Obtained from Measurements Performed with a Calorimetry Minisensor. Sensors 2017, 17, 2749. https://doi.org/10.3390/s17122749
Socorro F, Rodríguez de Rivera PJ, Rodríguez de Rivera M, Rodríguez de Rivera M. Mathematical Model for Localised and Surface Heat Flux of the Human Body Obtained from Measurements Performed with a Calorimetry Minisensor. Sensors. 2017; 17(12):2749. https://doi.org/10.3390/s17122749
Chicago/Turabian StyleSocorro, Fabiola, Pedro Jesús Rodríguez de Rivera, Miriam Rodríguez de Rivera, and Manuel Rodríguez de Rivera. 2017. "Mathematical Model for Localised and Surface Heat Flux of the Human Body Obtained from Measurements Performed with a Calorimetry Minisensor" Sensors 17, no. 12: 2749. https://doi.org/10.3390/s17122749
APA StyleSocorro, F., Rodríguez de Rivera, P. J., Rodríguez de Rivera, M., & Rodríguez de Rivera, M. (2017). Mathematical Model for Localised and Surface Heat Flux of the Human Body Obtained from Measurements Performed with a Calorimetry Minisensor. Sensors, 17(12), 2749. https://doi.org/10.3390/s17122749