1. Introduction
In the age of artificial intelligence, sensors play quite an important role for environment sensing and information acquisition. At the same time, sensors may be affected by the complicated application environment. Thus, multi-sensor modeling and sensor data fusion are important issues in many real applications [
1,
2,
3,
4,
5,
6,
7]. Driven by real applications, many methods have been proposed for multi-sensor modeling and sensor data fusion [
8], including neural network models [
1,
9], belief function theory [
10,
11], Dempster–Shafer evidence theory [
12,
13,
14], fuzzy set theory [
15], Z-Numbers [
16], and so on [
17]. Furthermore, accompanied by multi-sensor data fusion, how to measure the uncertain degree or the reliability of sensor reports with heterogeneous sources is still an open issue. This paper focuses on multi-sensor data fusion by firstly proposing a new uncertainty measure and then designing a new uncertainty measure-based sensor data fusion approach.
Dempster–Shafer evidence theory [
18,
19] is effective in uncertain information modeling and processing, and it has been widely used in many fields, such as multiple attribute decision making [
20,
21,
22], risk analysis [
23,
24,
25,
26,
27,
28], pattern recognition [
29,
30,
31,
32,
33,
34], fault diagnosis [
11,
12,
13], controller design [
35,
36] and so on [
37,
38,
39]. Although Dempster–Shafer evidence theory is an effective method for information processing, the classical Dempster’s rule of combination can’t be used directly for conflict sensor data fusion, especially when there exists highly conflicting data, which may lead to counterintuitive results [
40,
41]. One way to handle the conflict information in real applications, such as sensor data fusion, is to quantify the uncertainty before applying data fusion [
11,
13,
42]. However, how to measure the uncertainty of uncertain information in the framework of Dempster–Shafer evidence theory is still an open issue [
43,
44,
45].
Shannon entropy is an admitted way for measuring information volume [
46], which is a typical way for uncertainty measure in the probabilistic framework. Although Shannon entropy has been generalized to many fields, for example, as a generalization of Shannon entropy, network entropy is an effective measurement for measuring the complexity of networks [
47,
48,
49,
50], and Shannon entropy can’t be used directly among mass functions in the framework of Dempster–Shafer evidence theory because a mass function is a generalized probability assigned on the power set of the frame of discernment (FOD). To address this issue, many uncertainty measures in Dempster–Shafer framework are proposed, such as Hohle’s confusion measure [
51], Yager’s dissonance measure [
52], the weighted Hartley entropy [
53], Klir and Ramer’s discord measure [
54], Klir and Parviz’s strife measure [
55] and George and Pal’s conflict measure [
56] and so on [
43,
44]. However, the existed methods may not be that effective in some cases [
57]. Recently, another uncertainty measure named Deng entropy is proposed [
57]. Although Deng entropy had been successfully applied in some real applications [
11,
12,
13,
14,
16], Deng entropy didn’t take into consideration of the scale of FOD, which means a loss of available and valuable information in information processing.
In order to overcome this shortage of Deng entropy, a weighted belief entropy based on Deng entropy is proposed in this paper. The weighted belief entropy takes advantage of the relative scale of a proposition with respect to the FOD. In other words, the cardinality of the proposition and the number of element in FOD are used to define the weight factor in the proposed uncertain measure. After that, based on the proposed measure, a new sensor data fusion approach is proposed. In the proposed method, the weighted belief entropy is used to preprocess the conflict data by measuring the uncertain degree of each body of evidence (BOE). Finally, the conflict data can be fused by Dempster’s rule of combination.The effectiveness of the weighted belief entropy is verified with the numerical example in [
57]. In addition, the new sensor data fusion method is applied on fault diagnosis of a motor rotor to show the capacity of the new method in real application.
The rest of this paper is organized as follows. In
Section 2, the preliminaries on Dempster–Shafer evidence theory, Shannon entropy, Deng entropy and some uncertainty measures in Dempster–Shafer framework are briefly introduced. In
Section 3, the weighted belief entropy is proposed. In
Section 4, a new sensor data fusion approach based on the weighted belief entropy is proposed. In
Section 5, a numerical example for the new method is presented. In
Section 6, the proposed sensor data fusion method is used for fault diagnosis of a motor rotor. The conclusions are given in
Section 7.
3. The Proposed Uncertainty Measurement
In this section, a weighted belief entropy based on Deng entropy is proposed. In the framework of Dempster–Shafer evidence theory, the uncertain information is represented not only by mass functions, the FOD is also a source of uncertainty, for example, the number of elements in a FOD can be changed even if the mass value of each proposition keeps still. However, the existed belief entropy, such as Dubois and Prade’s weighted Hartley entropy and Deng entropy, only takes into consideration of mass functions, the cardinality of the proposition and the scale of FOD are ignored. This may lead to information loss in information processing.
3.1. Weighted Belief Entropy
By addressing more available information in the evidence, includes the scale of FOD, denoted as
, and the relative scale of a focal element with respect to the FOD, denoted as
. The new belief entropy named the weighted belief entropy is proposed as follows:
where
X is the FOD,
A is the focal element of the mass function,
denotes the cardinality of the proposition
A and
is the number of elements in FOD.
Compared with Deng entropy, the weighted belief entropy addresses more uncertain information in BOE, which can contribute to a more accurate information processing procedure in real applications. In the next subsection, a numerical example is used to show the effectiveness of the new measure, as well as making a comparison with some other typical uncertainty measures in Dempster–Shafer framework.
3.2. Numerical Example
In order to test the capacity and superiority of the weighted belief entropy, recall the example in [
57].
Consider the mass function
,
,
and
in a FOD
with fifteen elements denoted as Element 1, ..., and Element 15.
T represents a variable subset with its number of element changes from Element 1 to Element 14, as is shown in
Table 1.
Deng entropy
in Equation (
8) and the weighted belief entropy
in Equation (
16) are calculated with a changed proposition, and the results are shown in
Table 1. According to
Table 1, the values of weighted belief entropy are all smaller than that of Deng entropy. This is reasonable because more information in the BOE is taken into consideration with the weighted belief entropy, which means the weighted belief entropy has less information loss than Deng entropy. By reducing the uncertain degree, the new measure can be more accurate than Deng entropy for uncertainty measure in information processing.
Figure 1 shows the comparison results of different uncertainty measures in Dempster–Shafer framework. The uncertain degree measured by Hohle’s confusion measure never changes with the variation of the element number in proposition
T, thus it cannot measure the variance of uncertainty in this case. Similar to the confusion measure, Yager’s dissonance measure has a limited capacity of uncertainty measure in this case. The uncertain degree measured by Klir and Ramer’s discord measure, Klir and Parviz’s strife measure and George and Pal’s conflict measure all decreases with the increase of the element number in proposition
T. Thus, the confusion measure, dissonance measure, discord measure, strife measure and conflict measure can’t effectively measure the increase of uncertain degree in BOE in this case. With Dubois and Prade’s weighted Hartley entropy, Deng entropy and the weighted belief entropy, the uncertain degree increases significantly with the increase of the element number in proposition
T. However, the weighted Hartley entropy and Deng entropy have significant information loss compared with the weighted belief entropy because the uncertain information modelled as the scale of FOD (
) hasn’t been addressed in Equation (
8) and Equation (
12). Above all, the weighted belief entropy is more reasonable than the other uncertain measures in this case.
5. Experiment with Artificial Data
In order to verify the rationality and effectiveness of the proposed multi-sensor data fusion method, an experiment is performed in this section. The experiment in [
58] is recalled for the convenience of making a comparison with some other methods.
Considering a target recognition problem, three potential targets are denoted as
A,
B and
C, respectively. The evidence reported by five sensors is modeled as BPAs, as is shown in
Table 2. Intuitively, as is described in [
58], the report from the 2nd sensor is contrary to the other four sensors and
A will be the recognized target with the highest belief.
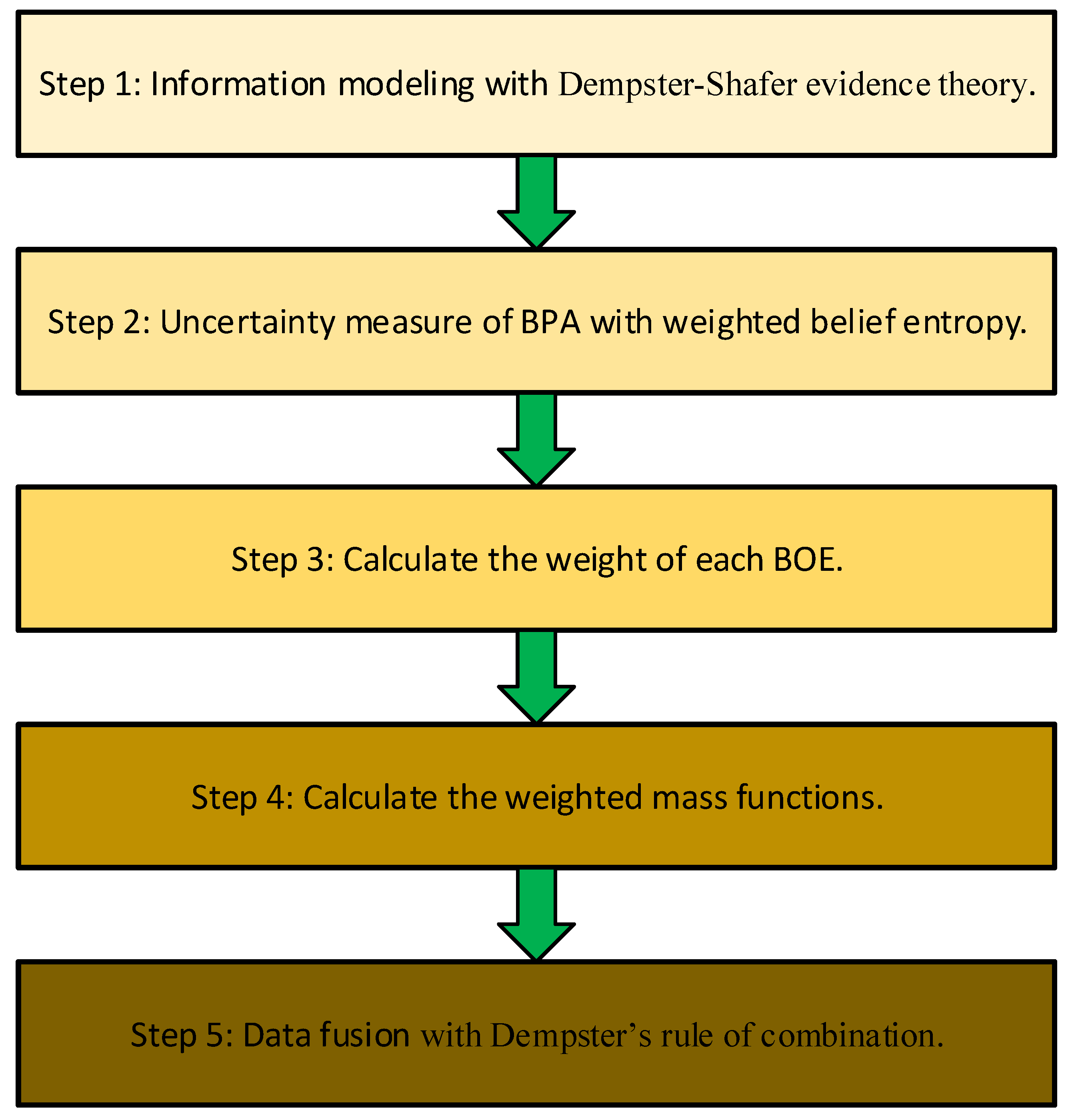
Execute the method in
Figure 2 of
Section 4. The result of the 1st step is adopted from [
58], and the BPAs are presented in
Table 2.
For the 2nd step, with Equation (
17), the weighted belief entropy of each sensor report is calculated as follows:
For the 3rd step, the weight of each evidence (BOE) can be calculated with Equation (
18), the calculation results are as follows:
For the 4th step, with Equation (
19), the weighted mass function of each proposition in
Table 2 is calculated as follows:
Finally, for the 5th step, with Dempster’s rule of combination and Equation (
20), each of the new weighted mass function is fused four times. The fusion results are shown as follows:
With the proposed method, it can be concluded that target
A is the recognized target. The results of this experiment with different methods are shown in
Table 3. Although the experiment results with the methods in [
11,
58,
59] all get a high belief on target
A, the proposed method has the highest belief (98.95%) on the recognized target
A. In addition, in [
11], the method for evidence modification is based on evidence distance and Deng entropy simultaneously, which is not convincing, because both evidence distance and Deng entropy are based on mass functions of BOE, thus there exists a coupling relationship among those two indices in [
11]. Compared with the methods in [
11,
58,
59], the weighted belief entropy in the new method contributes to a stronger capacity in conflict data fusion by addressing more available uncertain information in BOE.
7. Conclusions
In this paper, in the Dempster–Shafer evidence theory framework, the weighted belief entropy is proposed based on Deng entropy. The new measure takes advantage of information included in, not only the mass function, but also the scale of the FOD. By addressing more information in a BOE, which means less information loss in information processing, the weighted belief entropy can quantify the uncertainty of evidence effectively. The numerical example shows that this new measure can quantify the uncertainty of evidence more accurately, which is helpful for information processing.
Based on the weighted belief entropy, a multi-sensor data fusion approach is proposed in this paper. A numerical example and an application on fault diagnosis are presented to verify the rationality and effectiveness of the new sensor data fusion method. Both the numerical example and the application indicate that the new measure contributes to a more accurate sensor data fusion method by addressing more uncertain information in the Dempster–Shafer evidence theory framework (BOE).
Further study of this work will be focused on extending the new measure and the proposed multi-sensor data fusion approach to solve more problems in industrial applications.






{kind=link}
{kind=link}