
Simulation Study of the Localization of a Near-Surface Crack Using an Air-Coupled Ultrasonic Sensor Array


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
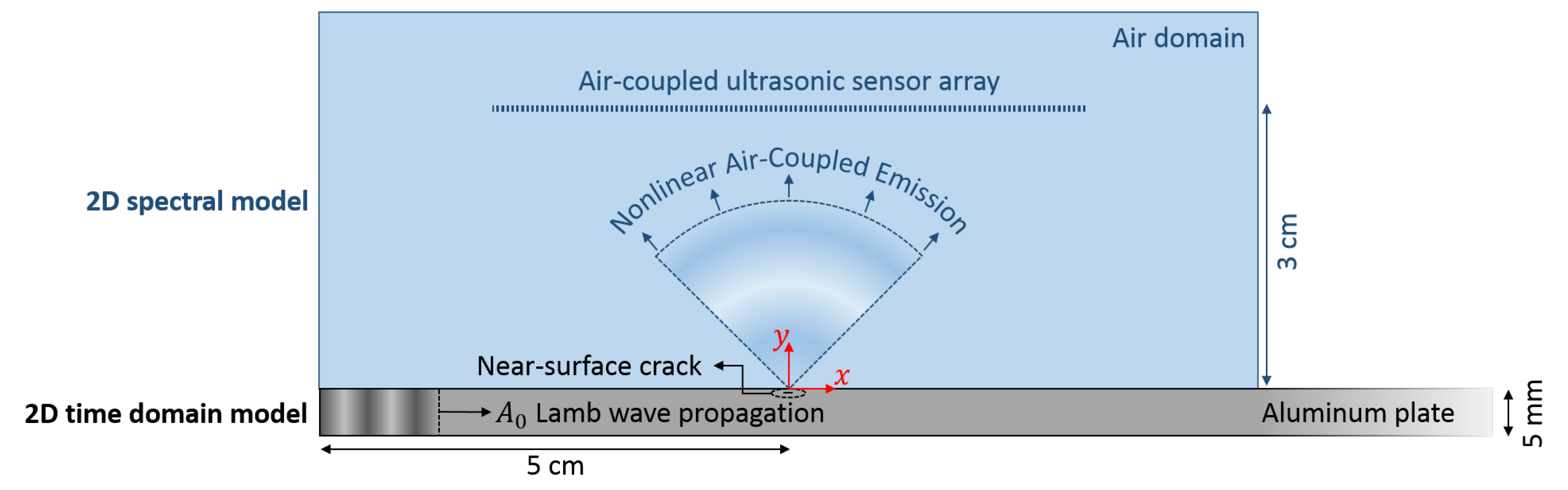
2. Forward Model: Generation and Emission of Nonlinear Features
2.1. Generation of Nonlinearities at a Near-Surface Crack
- the considered contact model includes friction based on the Coulomb friction law;
- the internal contact/crack surfaces have a nontrivial topography (e.g., roughness);
- the normal load-displacement dependency for rough surfaces requires some information on roughness statistics, or otherwise, it can be measured directly for an engineered contact;
- the tangential interactions appear during shift; rolling and torsion as movement types are not considered;
- plasticity and adhesion are neglected.
- Contact loss occurs when . In this case, no contact interaction is present, meaning that . As a result, asperities remain unstrained at this moment, meaning that , and hence, . These modifications will guarantee correct evolution of the memory diagram function once the crack faces get in contact.
- Partial slip occurs when and , with a material constant depending on Poisson’s ratio:The second identification criterion actually corresponds to Coulomb’s condition for stick regimes, which, in this case, is written for displacements instead of the more traditional condition written for forces. In the partial slip case, the total sliding contribution remains unchanged, and hence, . Using this new value for as an argument in the MMD algorithm, the tangential load T can be calculated. The magnitude of the normal load N is calculated using Equation (1).
- Total sliding occurs when and . Similar to the partial slip case, the second identification criterion corresponds to Coulomb’s condition for slip regimes, again written for displacements. In this case, the tangential load is determined in accordance with the Coulomb friction law, , where the magnitude of N is again calculated using Equation (1). To guarantee correct evolution of the memory diagram function during the next time steps, we also set , as this is the maximum possible tangential displacement corresponding to elastic deformation of asperities, and, as a result, .
2.2. Nonlinear Air-Coupled Emission
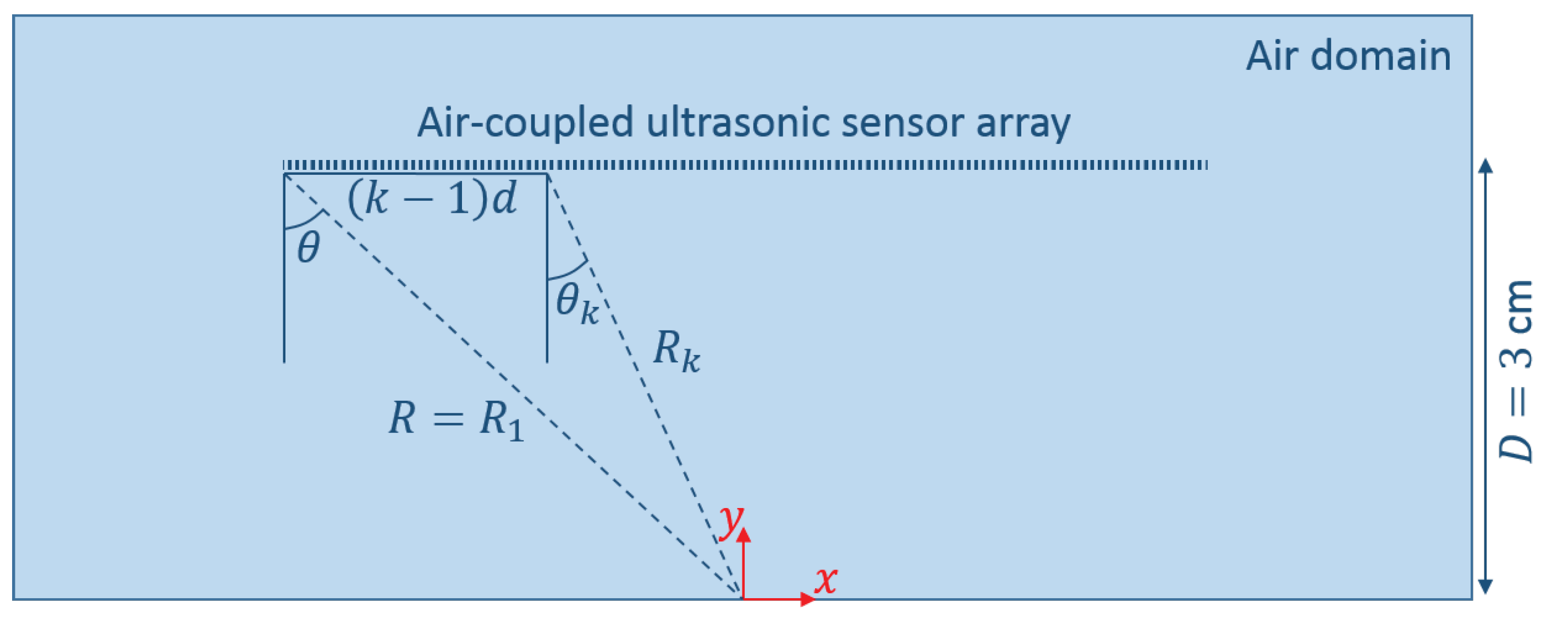
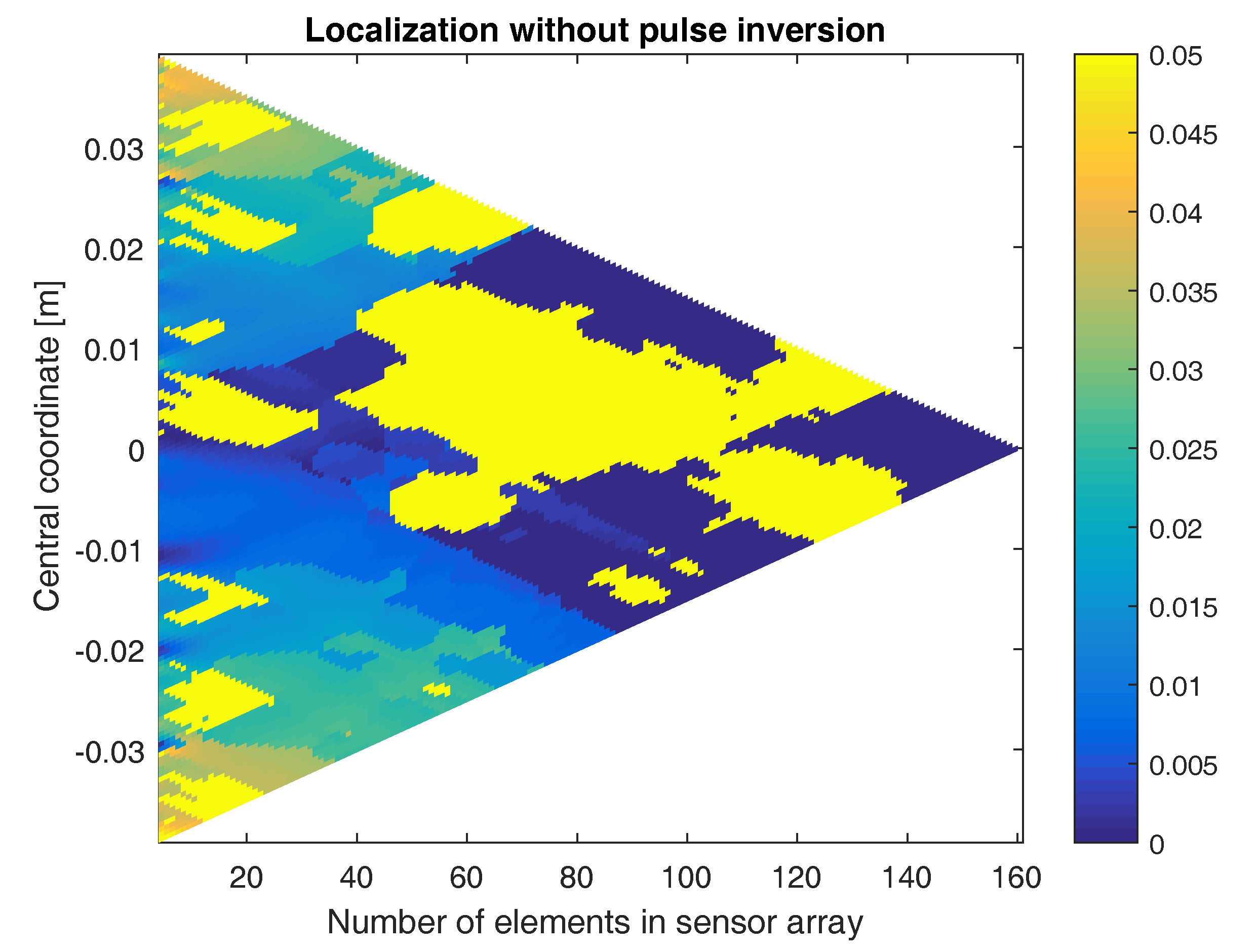
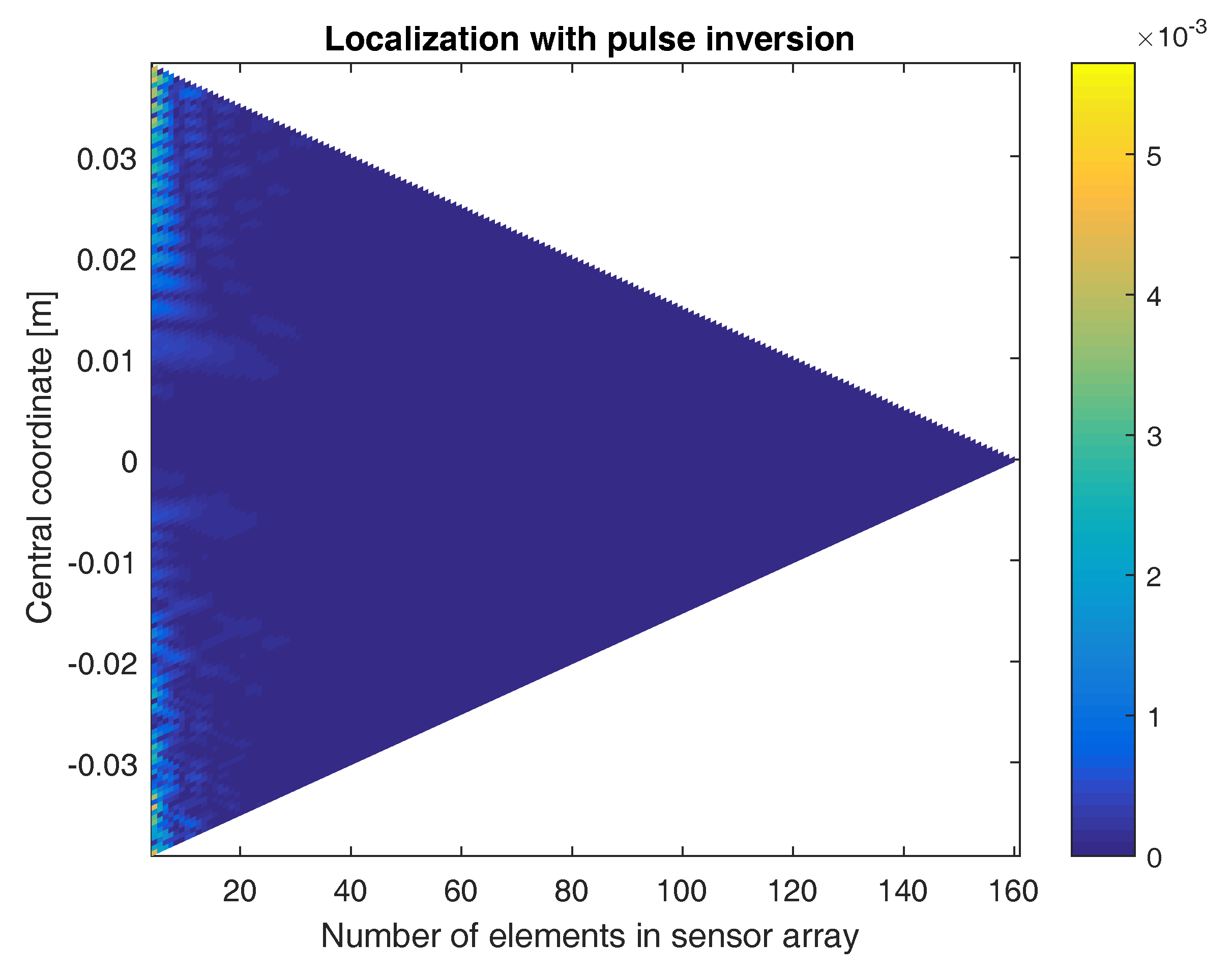
3. Inverse Model: Defect Localization
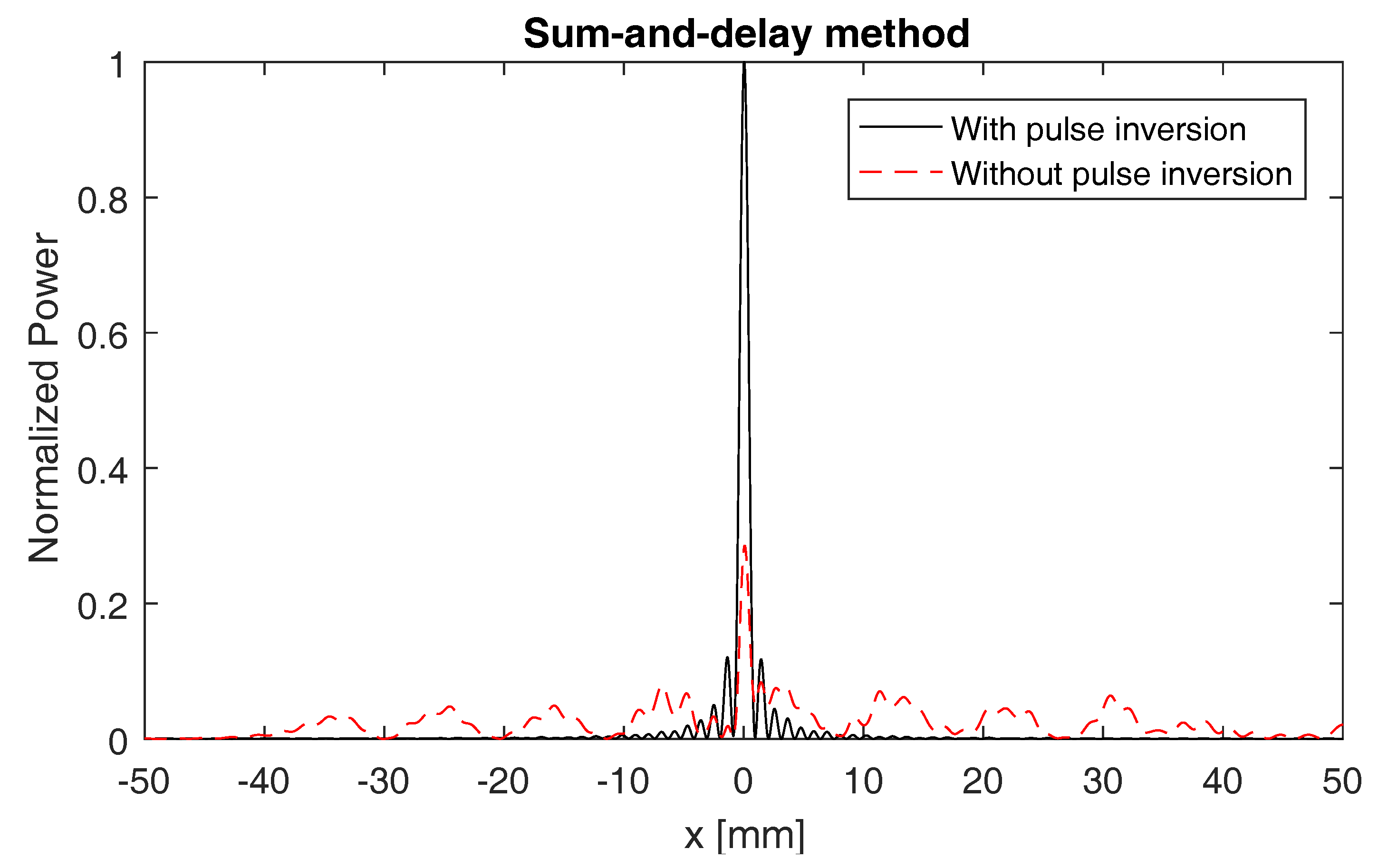
3.1. Sum-And-Delay Approach
3.2. Direct Linear Approach
3.3. Direct Quadratic Approach
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DOA | Direction Of Arrival |
| MMD | Method of Memory Diagrams |
| NACE | Nonlinear Air-Coupled Emission |
| NDT&E | Non-Destructive Testing and Evaluation |
| NEWS | Nonlinear Elastic Wave Spectroscopy |
| SAT | Sparse Array Tomography |
| SLV | Scanning Laser Vibrometry |
| TR | Time Reversal |
| ULA | Uniform Linear Array |
References
- Nagy, P. Fatigue damage assessment by nonlinear ultrasonic materials characterization. Ultrasonics 1998, 36, 375–381. [Google Scholar] [CrossRef]
- Solodov, I. Ultrasonics of non-linear contacts: Propagation, reflection and NDE-applications. Ultrasonics 1998, 36, 383–390. [Google Scholar] [CrossRef]
- Solodov, I.; Krohn, N.; Busse, G. CAN: An example of nonclassical acoustic nonlinearity in solids. Ultrasonics 2002, 40, 621–625. [Google Scholar] [CrossRef]
- Van Den Abeele, K.; Johnson, P.; Sutin, A. Nonlinear elastic wave spectroscopy (NEWS) techniques to discern material damage, Part I: Nonlinear wave modulation spectroscopy (NWMS). Res. Nondestruct. Eval. 2000, 12, 17–30. [Google Scholar] [CrossRef]
- Van Den Abeele, K.; Carmeliet, J.; Ten Cate, J.; Johnson, P. Nonlinear elastic wave spectroscopy (NEWS) techniques to discern material damage, Part II: Single-mode nonlinear resonance acoustic spectroscopy. Res. Nondestruct. Eval. 2000, 12, 31–42. [Google Scholar] [CrossRef]
- Delrue, S.; Van Den Abeele, K. Three-dimensional finite element simulation of closed delaminations in composite materials. Ultrasonics 2012, 52, 315–324. [Google Scholar] [CrossRef] [PubMed]
- Ohara, Y.; Endo, H.; Hashimoto, Y.; Shintaku, Y.; Yamanaka, K. Monitoring growth of closed fatigue crack using subharmonic phased array. Rev. Quant. Nondestruct. Eval. 2010, 29, 903–909. [Google Scholar]
- Krohn, N.; Stoessel, R.; Busse, G. Acoustic non-linearity for defect selective imaging. Ultrasonics 2002, 40, 633–637. [Google Scholar] [CrossRef]
- Bruno, C.; Gliozzi, A.; Scalerandi, M.; Antonaci, P. Analysis of elastic nonlinearity using the scaling subtraction method. Phys. Rev. B. 2009, 79, 064108. [Google Scholar] [CrossRef]
- Simpson, D.; Chin, C.; Burns, P. Pulse Inversion Doppler: A new method for detecting nonlinear echoes from microbubble contrast agents. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1999, 46, 372–382. [Google Scholar] [CrossRef] [PubMed]
- Donskoy, D.; Sutin, A.; Ekimov, A. Nonlinear acoustic interaction on contact interfaces and its use for nondestructive testing. NDT E Int. 2001, 34, 231–238. [Google Scholar] [CrossRef]
- Fink, M.; Cassereau, D.; Derode, A.; Prada, C.; Roux, P.; Tanter, M.; Thomas, J.; Wu, F. Time-reversed acoustics. Rep. Prog. Phys. 2000, 63, 1933–1995. [Google Scholar] [CrossRef]
- Ulrich, T.; Johnson, P.; Sutin, A. Imaging nonlinear scatterers applying the time reversal mirror. J. Acoust. Soc. Am. 2006, 119, 1514–1518. [Google Scholar] [CrossRef]
- Clarke, T.; Cawley, P. Enhancing the defect localization capability of a guided wave SHM system applied to a complex structure. Struct. Health Monit. 2010, 10, 247–259. [Google Scholar] [CrossRef]
- Michaels, J.; Michaels, T. Damage localization in inhomogeneous plates using a sparse array of ultrasonic transducers. Review 2007, 26, 846–853. [Google Scholar]
- Zhao, X.; Gao, H.; Zhang, G.; Ayhan, B.; Yan, F.; Kwan, C.; Rose, J. Active health monitoring of an aircraft wing with embedded piezoelectric sensor/actuator network: I. Defect detection, localization and growth monitoring. Smart Mater. Struct. 2007, 16, 1208–1217. [Google Scholar] [CrossRef]
- Chimenti, D. Review of air-coupled ultrasonic materials characterization. Ultrasonics 2014, 54, 1804–1816. [Google Scholar] [CrossRef] [PubMed]
- Remillieux, M.; Anderson, B.; Ulrich, T.; Le Bas, P.; Haberman, M.; Zhu, J. Review of air-coupled transduction for nondestructive testing and evaluation. Acoust. Today 2014, 10, 36–45. [Google Scholar]
- Ouchi, A.; Sugawara, A.; Ohara, Y.; Yamanaka, K. Subharmonic phased array for crack evaluation using surface acoustic wave. Jpn. J. Appl. Phys. 2015, 54, 07HC05. [Google Scholar] [CrossRef]
- Solodov, I.; Busse, G. Multi-frequency defect selective imaging via nonlinear ultrasound. Acoust. Imaging 2012, 31, 385–398. [Google Scholar]
- Delrue, S.; Van Den Abeele, K. Detection of defect parameters using nonlinear air-coupled emission by ultrasonic guided waves at contact acoustic nonlinearities. Ultrasonics 2015, 63, 147–154. [Google Scholar] [CrossRef] [PubMed]
- Solodov, I.; Busse, G. Nonlinear air-coupled emission: The signature to reveal and image microdamage in solid materials. Appl. Phys. Lett. 2007, 91, 251910. [Google Scholar] [CrossRef]
- Lee, G.; Cheong, C.; Shin, S.; Jung, S. Acase study of localization and identification of noise sources from a pitch and a stall regulated wind turbine. Appl. Phys. 2012, 73, 817–827. [Google Scholar]
- Panda, J.; Mosher, R.; Porter, B. Noise source identification during rocket engine test firings and a rocket launch. J. Spacecr. Rockets 2014, 51, 1761–1772. [Google Scholar] [CrossRef]
- Aleshin, V.; Bou Matar, O.; Van Den Abeele, K. Method of memory diagrams for mechanical frictional contacts subject to arbitrary 2D loading. Int. J. Solids Struct. 2015, 60–61, 84–95. [Google Scholar] [CrossRef]
- Biwa, S.; Nakajima, S.; Ohno, N. On the acoustic nonlinearity of solid-solid contact with pressure-dependent interface stiffness. J. Appl. Mech. 2004, 71, 508–515. [Google Scholar] [CrossRef]
- Aleshin, V.; Delrue, S.; Bou Matar, O.; Van Den Abeele, K. Two dimensional modeling of elastic wave propagation in solids containing cracks with rough surfaces and friction—Part I: Theoretical background. Ultrasonics 2017. submitted for publication. [Google Scholar]
- Delrue, S.; Aleshin, V.; Truyaert, K.; Bou Matar, O.; Van Den Abeele, K. Two dimensional modeling of elastic wave propagation in solids containing cracks with rough surfaces and friction—Part II: Numerical implementation. Ultrasonics 2017. submitted for publication. [Google Scholar]
- Stoica, P.; Moses, R. Spectral Analysis of Signals; Prentice Hall, Inc.: New York, NY, USA, 2005. [Google Scholar]
- Degel, C.; Schuck, H.; Knoll, T.; Bauerfeld, F.; Heinz, M.; Haberer, W.; Fonfara, H.; Lemor, R.; Elling, B.; Danz, R. Airborne phased array for airborne applications based on celular polymer. Proceedings of 2007 IEEE International Ultrasonics Symposium, New York, NY, USA, 28–31 October 2007; pp. 727–732. [Google Scholar]
- Hajati, A.; Latev, D.; Gardner, D.; Hajati, A.; Imai, D.; Torrey, M.; Schoeppler, M. Three-dimensional micro electromechanical system piezoelectric ultrasound transducer. Appl. Phys. Lett. 2012, 101, 253101. [Google Scholar] [CrossRef]
- Felice, M.; Velichko, A.; Wilcox, P.; Lane, C. Depth measurement of small surface-breaking cracks using the Half-Skip Total Focusing Method. AIP Conf. Proc. 2015, 1650, 994. [Google Scholar]
- Qiu, Y.; Gigliotti, J.; Wallace, M.; Griggio, F.; Demore, C.; Cochran, S.; Trollier-McKinstry, S. Piezoelectric micromachined ultrasound transducer (PMUT) aarray for integrated sensing, actuation and imaging. Sensors 2015, 15, 8020–8041. [Google Scholar] [CrossRef] [PubMed]
- Swindlehurst, A.; Kailath, T. Passive direction-of-arrival and range estimation for near-field sources. In Proceedings of the Fourth Annual ASSP Workshop on Spectrum Estimation and Modeling, Minneapolis, MN, USA, 3–5 August 1988. [Google Scholar]














© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Delrue, S.; Aleshin, V.; Sørensen, M.; Lathauwer, L.D. Simulation Study of the Localization of a Near-Surface Crack Using an Air-Coupled Ultrasonic Sensor Array. Sensors 2017, 17, 930. https://doi.org/10.3390/s17040930
Delrue S, Aleshin V, Sørensen M, Lathauwer LD. Simulation Study of the Localization of a Near-Surface Crack Using an Air-Coupled Ultrasonic Sensor Array. Sensors. 2017; 17(4):930. https://doi.org/10.3390/s17040930
Chicago/Turabian StyleDelrue, Steven, Vladislav Aleshin, Mikael Sørensen, and Lieven De Lathauwer. 2017. "Simulation Study of the Localization of a Near-Surface Crack Using an Air-Coupled Ultrasonic Sensor Array" Sensors 17, no. 4: 930. https://doi.org/10.3390/s17040930
APA StyleDelrue, S., Aleshin, V., Sørensen, M., & Lathauwer, L. D. (2017). Simulation Study of the Localization of a Near-Surface Crack Using an Air-Coupled Ultrasonic Sensor Array. Sensors, 17(4), 930. https://doi.org/10.3390/s17040930