Hitchhiking Robots: A Collaborative Approach for Efficient Multi-Robot Navigation in Indoor Environments


Abstract
:1. Introduction
2. Hitchhiking in Robots
2.1. Hitchhiking Mechanism
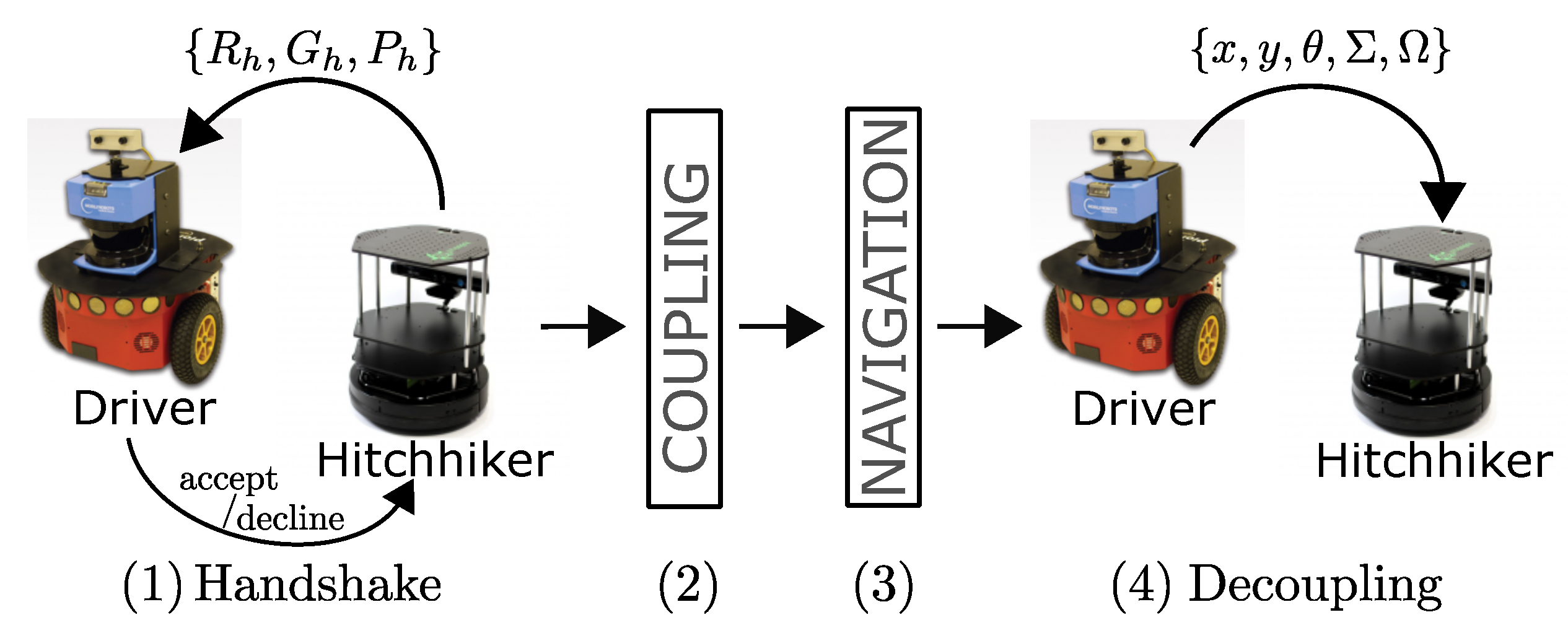
2.2. Four Steps of Hitchhiking
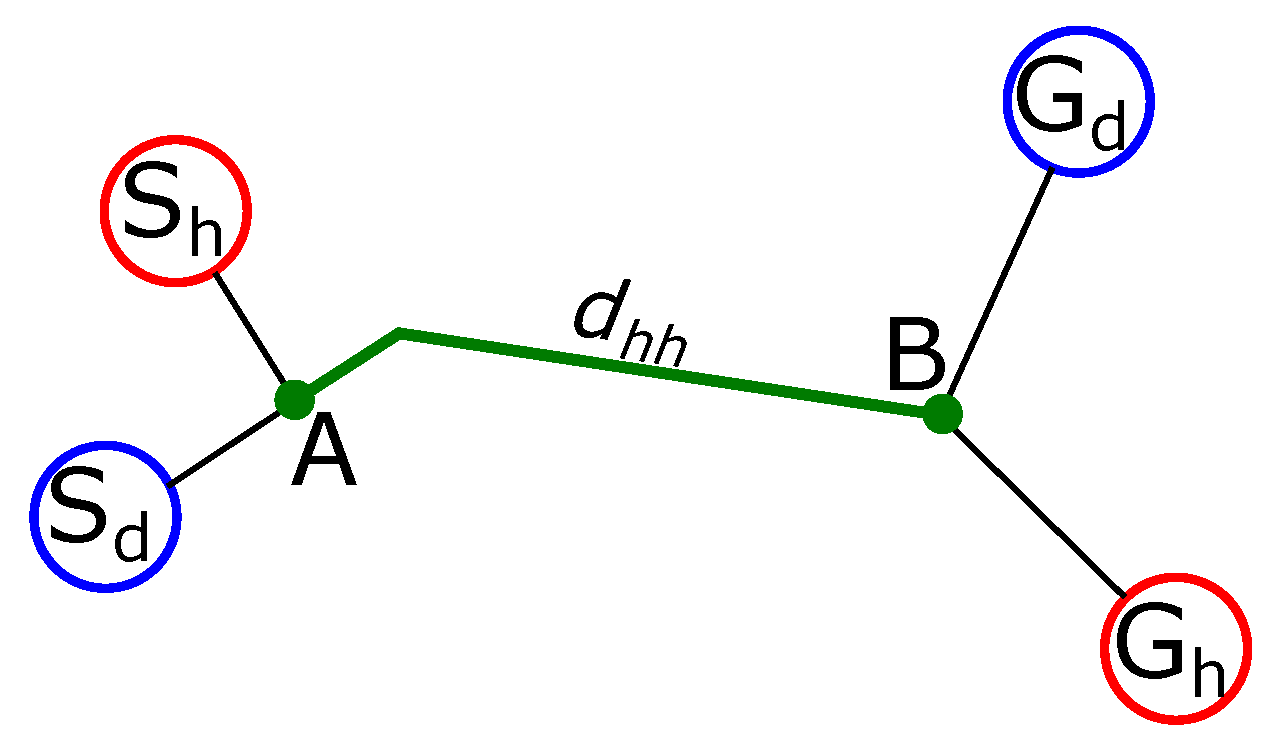
- Handshake: The hitchhiker keeps broadcasting requests to a potential driver until a threshold hitchhike wait time . Once a (potential) driver responds, the two robots exchange information. The hitchhiker request comprises of , where, is the ID, is the goal location, and is the profile of the hitchhiking robot. The potential driver robot checks if the length of the common path () traversed during hitchhiking is longer than a threshold distance (). This is graphically shown in Figure 3, in which, and are the start locations, and and are the goal locations of the driver and hitchhiker robots, respectively. The common path between the points and is the hitchhiking distance (). Hitchhiking is allowed if . Hitchhiking is denied for shorter distance (less than ) due to the overhead involved in coupling and decoupling. Moreover, hitchhiking over shorter distances affects the service time. The threshold hitchhiking length () depends on many factors like the dynamics of the environment, and the characteristics of the SLAM algorithm employed. A typical setting involves setting to several meters (ex. ≈20 m). Notice that, from Figure 3, if , hitchhking is allowed even if the nodes and are far from each other. The best case scenario for hitchhking is when and completely overlap. This entire process is called a handshake. If no potential driver is found until time, the hitchhiker navigates towards the goal on its own. A driver with high task priority () will simply ignore any requests from a hitchhiker.
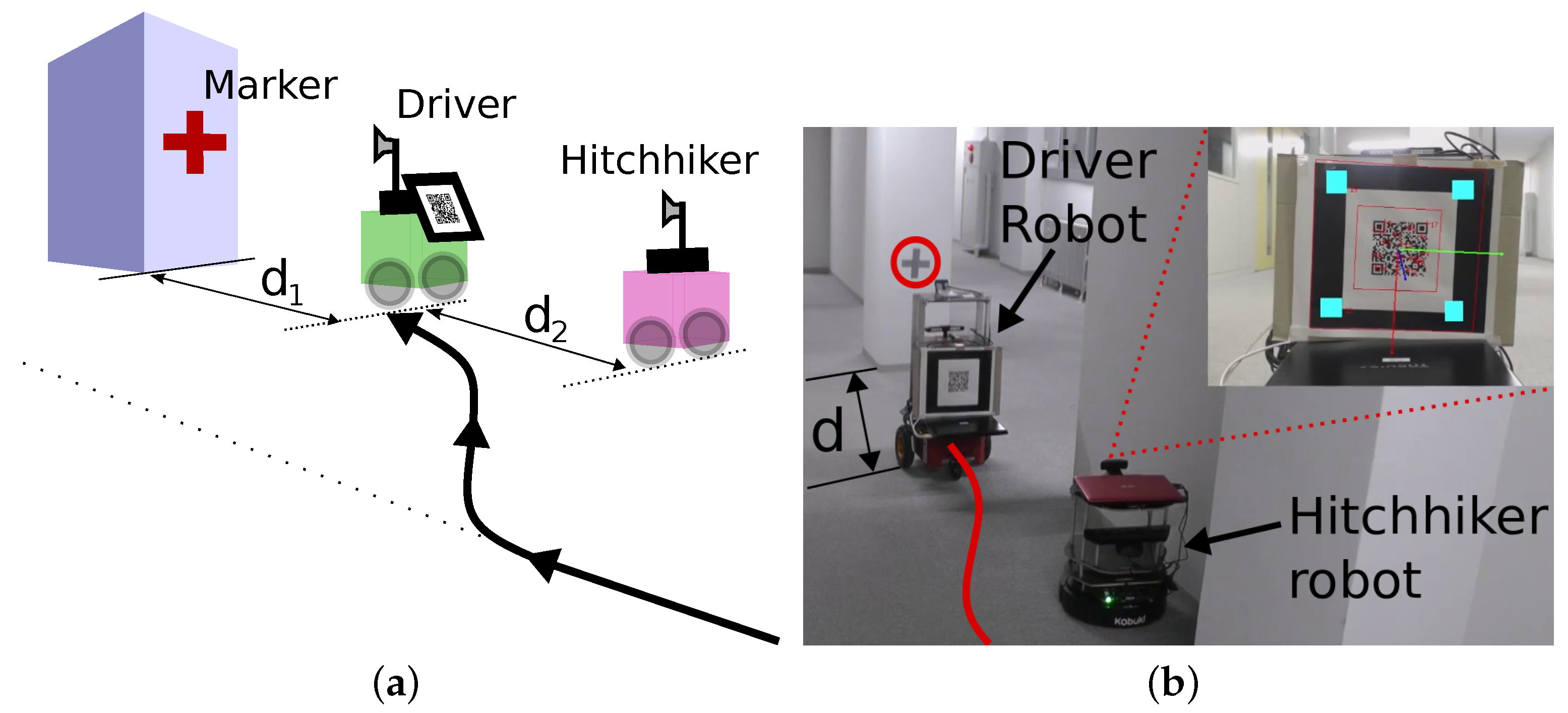
- Coupling: The next step is coupling between the hitchhiker and the driver. Coupling is defined as the process in which the hitchhiker aligns behind the driver robot and the QR-code behind the driver is recognized to initiate visual servoing. The alignment and coupling are only allowed within a threshold time and , respectively. In order to assist coupling, the environment is marked with special pre-defined markers known to all the robots. Certain positions with markers are also reserved to further assist coupling.
- Navigation: Once the robots are coupled, the driver initiates navigation towards the goal. During this time, the hitchhiker shut downs all the processes except visual servoing. In other words, the hitchhiker shuts down the localization, path planning, obstacle avoidance, and map update modules. It simply follows the driver robot using visual servoing. The driver robot executes all the modules.
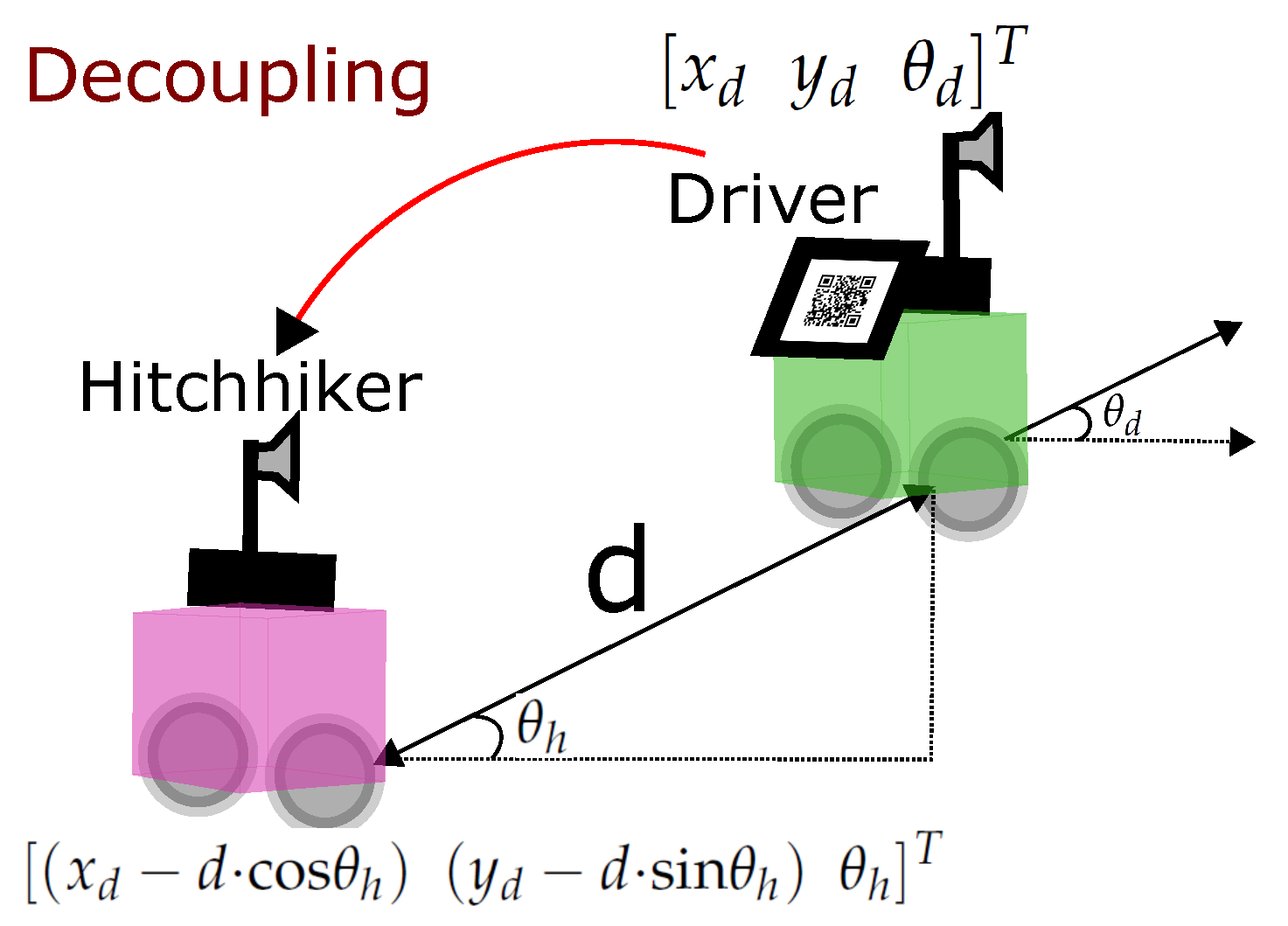
- Decoupling: Once the two robots have reached the destination, the decoupling process is initiated where visual servoing stops. During decoupling, the driver gives the current position location (i.e., the estimated pose in the map) and the uncertainty associated with it (). This information must be given to the hitchhiker as it requires it as an initial estimate to localize itself in the map to navigate to another location. Moreover, during navigation if the driver robot has updated its map with the location of the new static obstacles (), this information is also transferred to the hitchhiker to update its local map. This ensures that there is no loss of information during navigation for the hitchhiker.
3. Hitchhiking Points
- Loss of Efficiency: Hitchhiking consumes time in alignment and coupling. By allowing hitchhiking anywhere in the map, the robots may not find fixed markers in the environment to assist coupling. In the absence of such markers, coupling is difficult and the robots consume more time. Moreover, the robots must always be alert of an incoming request from a hitchhiker.
- Problem of Obstacles: Since it consumes time for the two robots to align and couple, hitchhiking at an inappropriate place is a hindrance in the pathways for other robots and people.
3.1. When to Hitchhike and When Not
4. Problem of ‘Driver Lost’ Scenario
| Algorithm 1: Hitchhiking Pseudocode (Driver Robot) |
 |
| Algorithm 2: Hitchhiking Pseudocode (Hitchhiker) |
 |
5. Award Mechanism
6. State of the Art in Robot Localization
6.1. Driver Robot Localization with Extended Kalman Filter
6.2. Pose Transfer during Decoupling
7. Experimental Results
7.1. Motion Model
7.2. Experiments in Which Hitchhiking Was Allowed
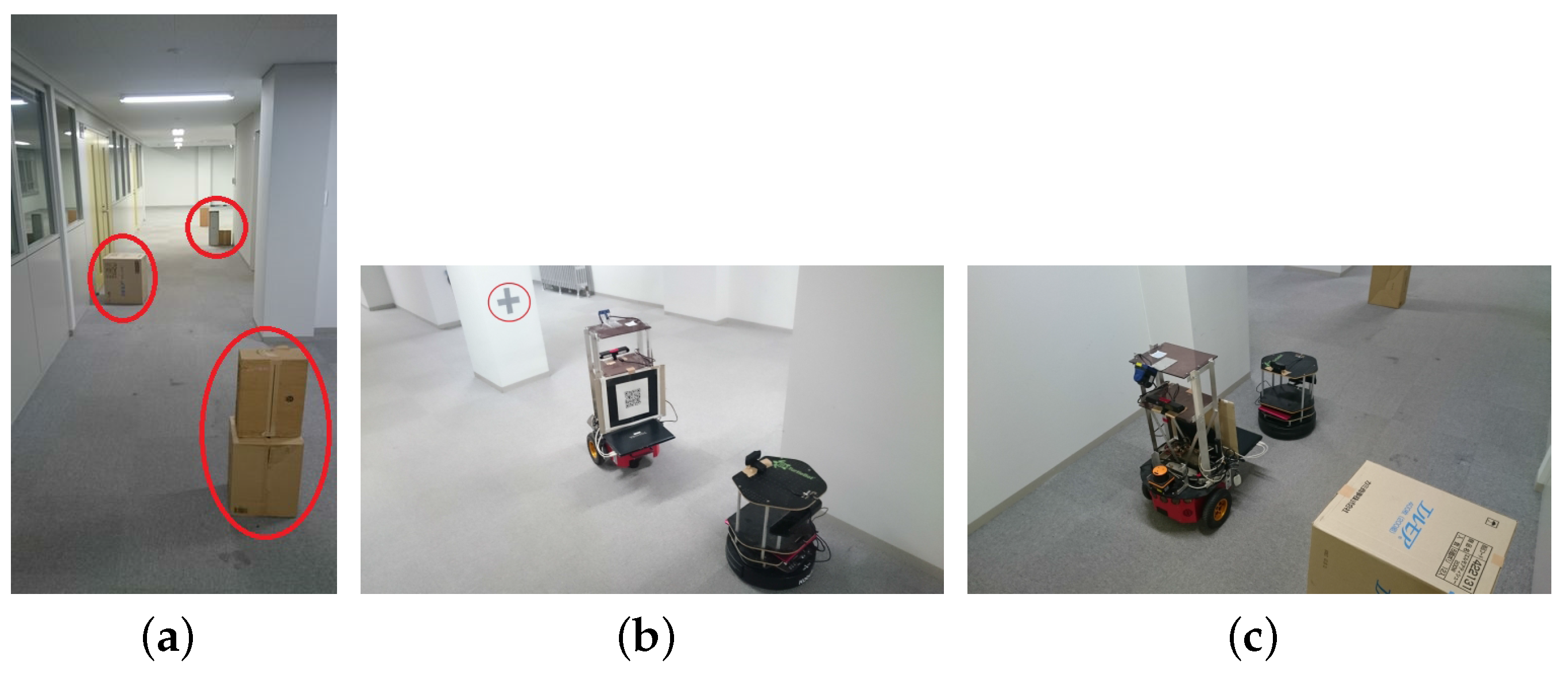
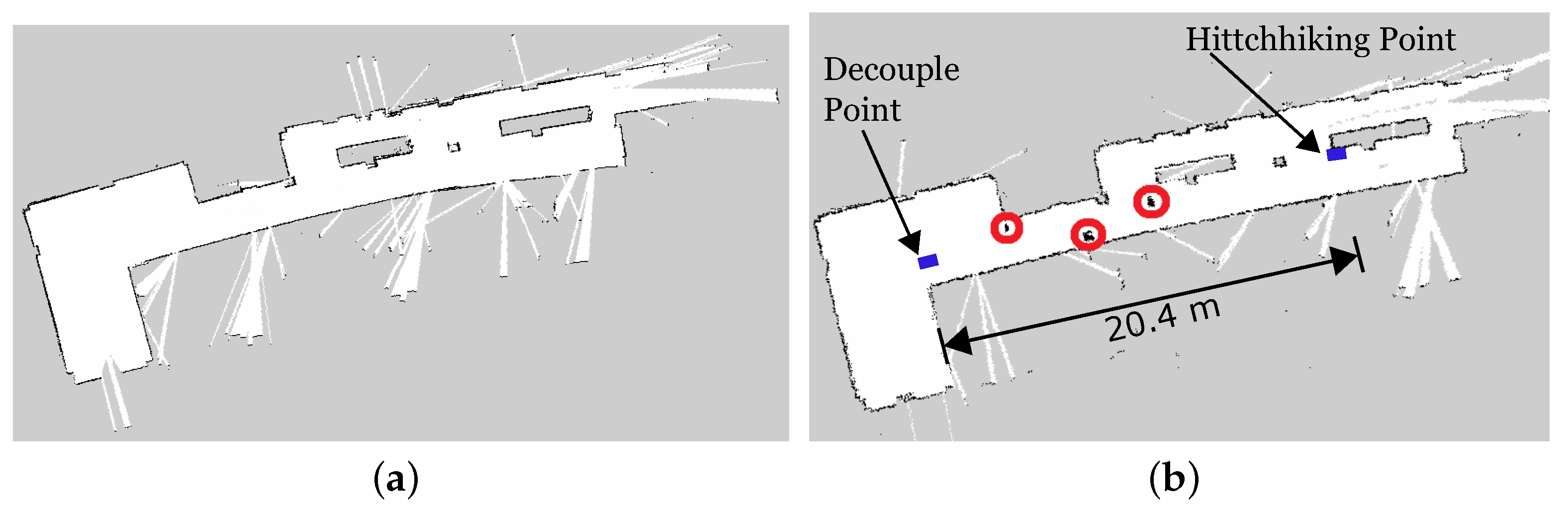
7.2.1. Experiment 1
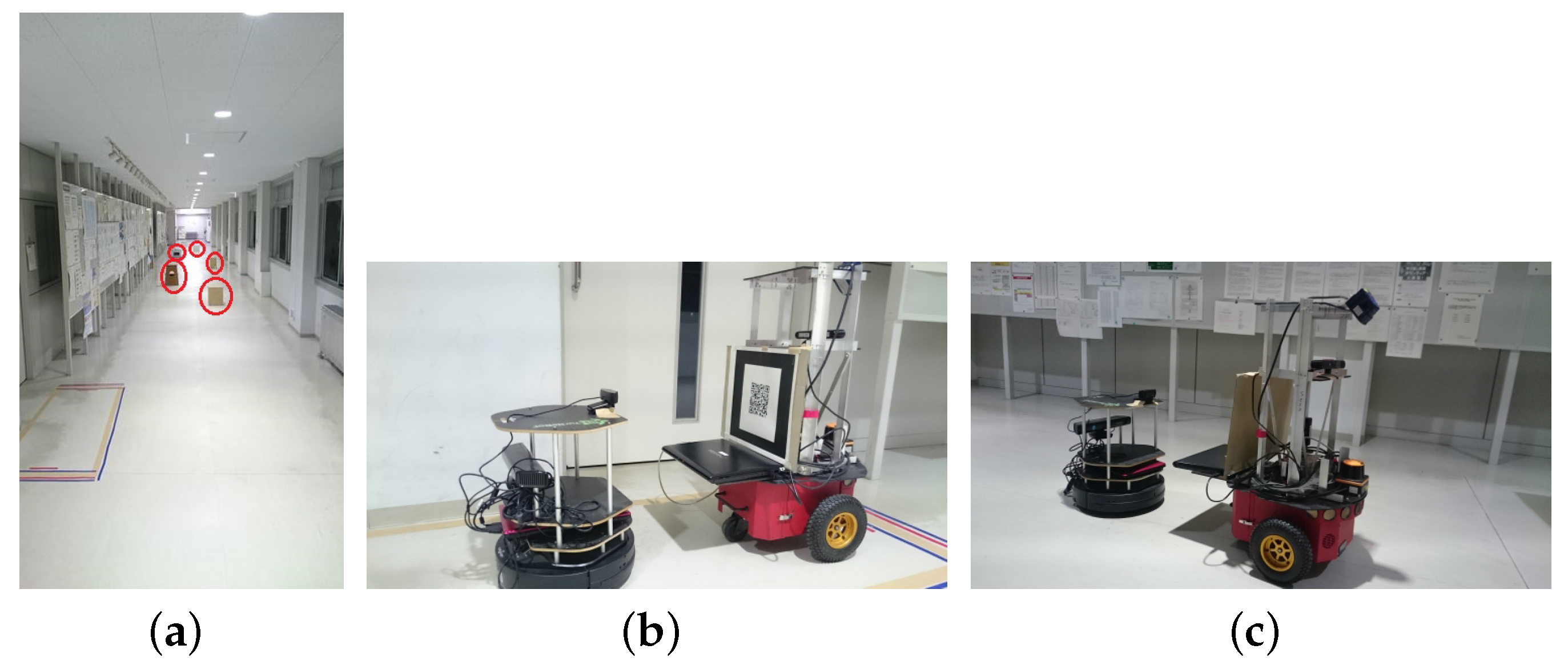
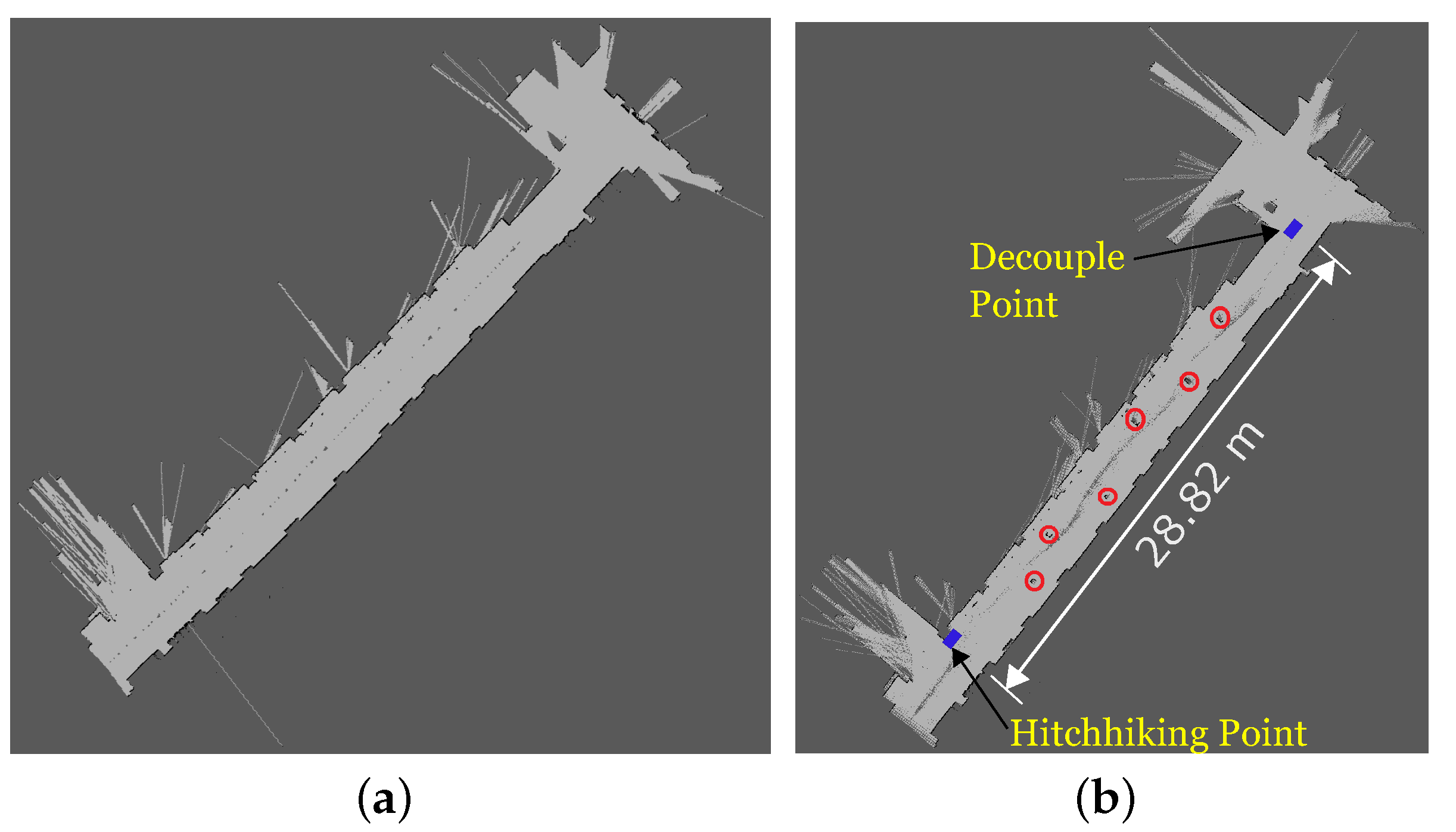
7.2.2. Experiment 2
7.3. Experiments with Denied Hitchhiking
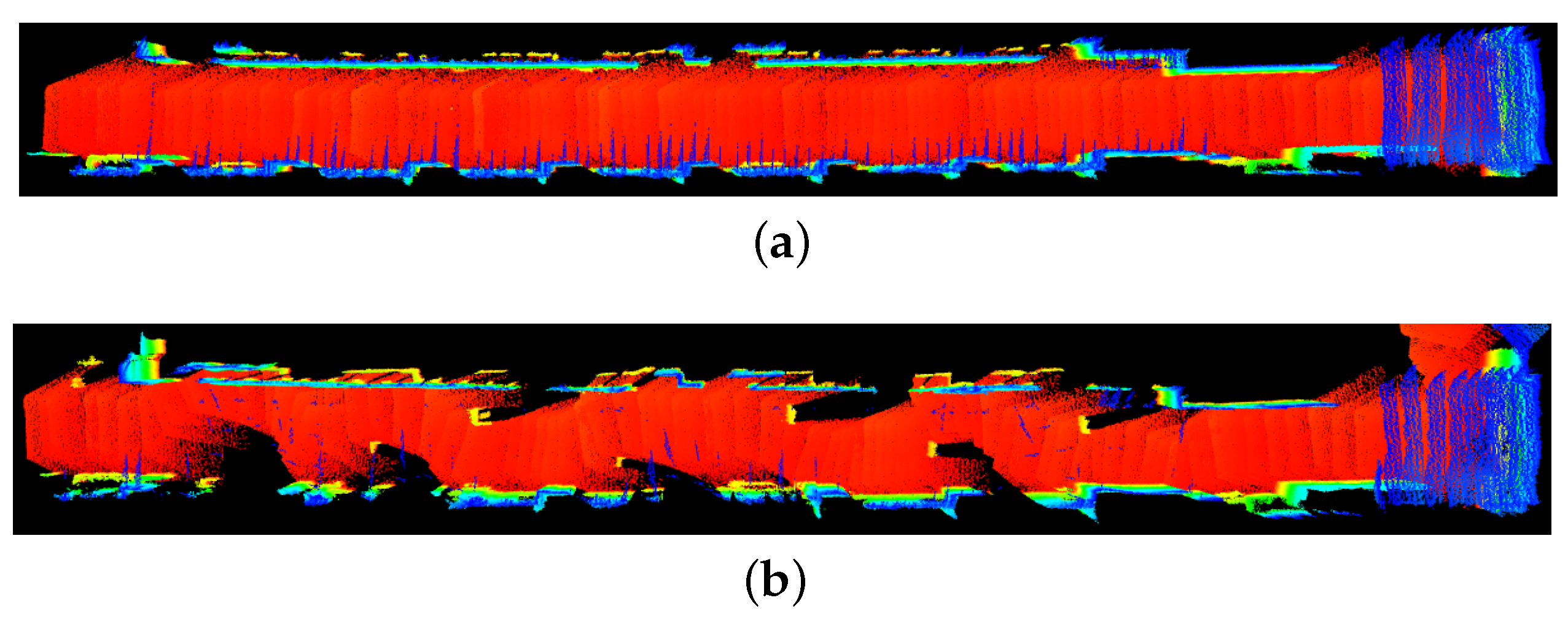
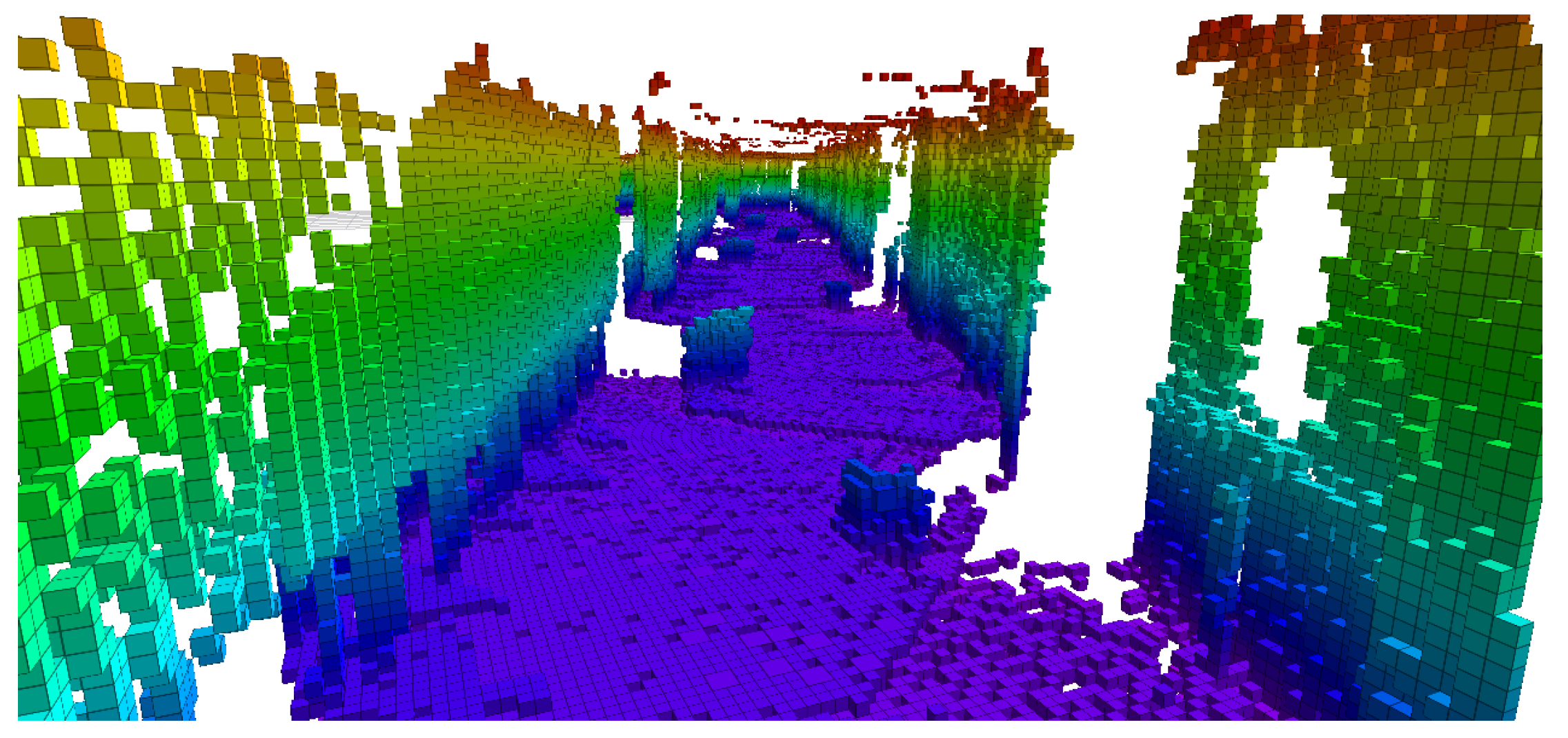
7.4. Transferring Quality Maps to Hitchhiker
8. Discussion
9. Summary
Supplementary Materials
Author Contributions
Conflicts of Interest
Abbreviations
| Robot ID of hitchhiker (h)/driver (d) | |
| Start location of hitchhiker (h)/driver (d) | |
| Goal location of hitchhiker (h)/driver (d) | |
| Task priority of hitchhiker (h)/driver (d) | |
| Robot profile of hitchhiker (h)/driver (d) | |
| Threshold hitchhike wait time | |
| Threshold alignment time | |
| Threshold coupling time | |
| Threshold hitchhiking distance | |
| Positional uncertainty of robot | |
| New static obstacles | |
| Robot Pose | |
| SLAM | Simultaneous Localization and Mapping |
| EKF | Extended Kalman Filter |
Appendix A

References
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef]
- Dissanayake, M.W.M.G.; Newman, P.; Clark, S.; Durrant-Whyte, H.F.; Csorba, M. A solution to the simultaneous localization and map building (SLAM) problem. IEEE Trans. Robot. Autom. 2001, 17, 229–241. [Google Scholar] [CrossRef]
- Zhang, C.; Noguchi, N.; Yang, L. Leader follower system using two robot tractors to improve work efficiency. Comput. Electron. Agric. 2016, 121, 269–281. [Google Scholar] [CrossRef]
- Zhang, C.; Noguchi, N. Development of leader-follower system for field work. In Proceedings of the 2015 IEEE/SICE International Symposium on System Integration (SII), Nagoya, Japan, 11–13 December 2015; pp. 364–368. [Google Scholar]
- Roumeliotis, S.I.; Bekey, G.A. Distributed multirobot localization. IEEE Trans. Robot. Autom. 2002, 18, 781–795. [Google Scholar] [CrossRef]
- Howard, A.; Sukhatme, G.S.; Mataric, M.J. Multirobot Simultaneous Localization and Mapping Using Manifold Representations. Proc. IEEE 2006, 94, 1360–1369. [Google Scholar] [CrossRef]
- Thrun, S.; Liu, Y. Multi-robot SLAM with Sparse Extended Information Filers. In Robotics Research. The Eleventh International Symposium; Springer Berlin Heidelberg Press: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Atanasov, N.; Ny, J.L.; Daniilidis, K.; Pappas, G.J. Decentralized active information acquisition: Theory and application to multi-robot SLAM. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 4775–4782. [Google Scholar]
- Roy, N.; Dudek, G. Collaborative Robot Exploration and Rendezvous: Algorithms, Performance Bounds and Observations. Auton. Robot. 2001, 11, 117–136. [Google Scholar] [CrossRef]
- Alonso-Mora, J.; Baker, S.; Rus, D. Multi-robot navigation in formation via sequential convex programming. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 4634–4641. [Google Scholar]
- Wee, S.G.; Kim, Y.G.; Lee, S.G.; An, J. Formation control based on virtual space configuration for multi-robot collective navigation. In Proceedings of the 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Korea, 30 October–2 November 2013; pp. 556–557. [Google Scholar]
- Ravankar, A.; Ravankar, A.; Kobayashi, Y.; Emaru, T. Symbiotic Navigation in Multi-Robot Systems with Remote Obstacle Knowledge Sharing. Sensors 2017, 17, 1581. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.C.; Chopra, N. Semi-autonomous teleoperation in task space with redundant slave robot under communication delays. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 679–684. [Google Scholar]
- Usmani, N.A.; Kim, T.H.; Ryu, J.H. Dynamic authority distribution for cooperative teleoperation. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5222–5227. [Google Scholar]
- Hutchinson, S.; Hager, G.D.; Corke, P.I. A tutorial on visual servo control. IEEE Trans. Robot. Autom. 1996, 12, 651–670. [Google Scholar] [CrossRef]
- Chaumette, F.; Hutchinson, S. Visual servo control, Part I: Basic approaches. IEEE Robot. Autom. Mag. 2006, 13, 82–90. [Google Scholar] [CrossRef]
- Sanderson, A.C.; Weiss, L.E. Adaptive Visual Servo Control of Robots. In Robot Vision; Pugh, A., Ed.; Springer: Berlin, UK, 1983; pp. 107–116. [Google Scholar]
- Wilson, W.J.; Hulls, C.C.W.; Bell, G.S. Relative end-effector control using Cartesian position based visual servoing. IEEE Trans. Robot. Autom. 1996, 12, 684–696. [Google Scholar] [CrossRef]
- Kermorgant, O.; Chaumette, F. Combining IBVS and PBVS to ensure the visibility constraint. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 2849–2854. [Google Scholar]
- Marchand, E.; Spindler, F.; Chaumette, F. ViSP for visual servoing: A generic software platform with a wide class of robot control skills. IEEE Robot. Autom. Mag. 2005, 12, 40–52. [Google Scholar] [CrossRef]
- Mezouar, Y.; Chaumette, F. Path planning for robust image-based control. IEEE Trans. Robot. Autom. 2002, 18, 534–549. [Google Scholar] [CrossRef]
- Hart, P.; Nilsson, N.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Chaumette, F. Potential problems of stability and convergence in image-based and position-based visual servoing. In The Confluence of Vision and Control; Kriegman, D.J., Hager, G.D., Morse, A.S., Eds.; Springer: London, UK, 1998; pp. 66–78. [Google Scholar]
- Bukhori, I.; Ismail, Z.H.; Namerikawa, T. Detection strategy for kidnapped robot problem in landmark-based map Monte Carlo Localization. In Proceedings of the 2015 IEEE International Symposium on Robotics and Intelligent Sensors (IRIS), Langkawi, Malaysia, 18–20 October 2015; pp. 75–80. [Google Scholar]
- Desrochers, B.; Lacroix, S.; Jaulin, L. Set-membership approach to the kidnapped robot problem. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 3715–3720. [Google Scholar]
- Majdik, A.; Popa, M.; Tamas, L.; Szoke, I.; Lazea, G. New approach in solving the kidnapped robot problem. In Proceedings of the ISR 2010 (41st International Symposium on Robotics) and ROBOTIK 2010 (6th German Conference on Robotics), Munich, Germany, 7–9 June 2010; pp. 1–6. [Google Scholar]
- Ravankar, A.A.; Hoshino, Y.; Ravankar, A.; Jixin, L.; Emaru, T.; Kobayashi, Y. Algorithms and a Framework for Indoor Robot Mapping in a Noisy Environment Using Clustering in Spatial and Hough Domains. Int. J. Adv. Robot. Syst. 2015, 12, 27. [Google Scholar] [CrossRef]
- Srkk, S. Bayesian Filtering and Smoothing; Cambridge University Press: New York, NY, USA, 2013. [Google Scholar]
- Menegaz, H.M.T.; Ishihara, J.Y.; Borges, G.A.; Vargas, A.N. A Systematization of the Unscented Kalman Filter Theory. IEEE Trans. Autom. Control 2015, 60, 2583–2598. [Google Scholar] [CrossRef]
- Scheding, S.; Dissanayake, G.; Nebot, E.M.; Durrant-Whyte, H. An experiment in autonomous navigation of an underground mining vehicle. IEEE Trans. Robot. Autom. 1999, 15, 85–95. [Google Scholar] [CrossRef]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics (Intelligent Robotics and Autonomous Agents); The MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Hao, Y.; Xiong, Z.; Sun, F.; Wang, X. Comparison of Unscented Kalman Filters. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 895–899. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; Wiley-Interscience: Hoboken, NJ, USA, 2006. [Google Scholar]
- Daum, F. Nonlinear filters: Beyond the Kalman filter. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 57–69. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Emaru, T. Avoiding blind leading the blind: Uncertainty integration in virtual pheromone deposition by robots. Int. J. Adv. Robot. Syst. 2016, 13, 1–16. [Google Scholar] [CrossRef]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Mustiere, F.; Bolic, M.; Bouchard, M. Rao-Blackwellised Particle Filters: Examples of Applications. In Proceedings of the 2006 Canadian Conference on Electrical and Computer Engineering, Ottawa, ON, Canada, 7–10 May 2006; pp. 1196–1200. [Google Scholar]
- Kurt-Yavuz, Z.; Yavuz, S. A comparison of EKF, UKF, FastSLAM2.0, and UKF-based FastSLAM algorithms. In Proceedings of the 2012 IEEE 16th International Conference on Intelligent Engineering Systems (INES), Lisbon, Portugal, 13–15 June 2012; pp. 37–43. [Google Scholar]
- Zhao, S.; Shmaliy, Y.S.; Shi, P.; Ahn, C.K. Fusion Kalman/UFIR Filter for State Estimation with Uncertain Parameters and Noise Statistics. IEEE Trans. Ind. Electron. 2017, 64, 3075–3083. [Google Scholar] [CrossRef]
- Ahn, C.K.; Shi, P.; Basin, M.V. Deadbeat Dissipative FIR Filtering. IEEE Trans. Circuits Syst. I Regul. Pap. 2016, 63, 1210–1221. [Google Scholar] [CrossRef]
- Pak, J.M.; Ahn, C.K.; Shmaliy, Y.S.; Lim, M.T. Improving Reliability of Particle Filter-Based Localization in Wireless Sensor Networks via Hybrid Particle/FIR Filtering. IEEE Trans. Ind. Inform. 2015, 11, 1089–1098. [Google Scholar] [CrossRef]
- Pak, J.M.; Ahn, C.K.; Shi, P.; Shmaliy, Y.S.; Lim, M.T. Distributed Hybrid Particle/FIR Filtering for Mitigating NLOS Effects in TOA-Based Localization Using Wireless Sensor Networks. IEEE Trans. Ind. Electron. 2017, 64, 5182–5191. [Google Scholar] [CrossRef]
- Grisetti, G.; Kummerle, R.; Stachniss, C.; Burgard, W. A Tutorial on Graph-Based SLAM. IEEE Intell. Transp. Syst. Mag. 2010, 2, 31–43. [Google Scholar] [CrossRef]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef]
- Pioneer P3-DX. Pioneer P3-DX Robot. 2016. Available online: http://www.mobilerobots.com/Mobile_Robots.aspx (accessed on 23 January 2016).
- TurtleBot 2. TurtleBot 2 Robot. 2015. Available online: http://turtlebot.com/ (accessed on 10 October 2015).
- Ravankar, A.; Ravankar, A.A.; Hoshino, Y.; Emaru, T.; Kobayashi, Y. On a Hopping-points SVD and Hough Transform Based Line Detection Algorithm for Robot Localization and Mapping. Int. J. Adv. Robot. Syst. 2016, 13, 98. [Google Scholar] [CrossRef]
- Wikipedia. Microsoft Kinect. 2016. Available online: https://en.wikipedia.org/wiki/Kinect (accessed on 25 November 2016).
- UHG-08LX Technical Specifications. UHG-08LX Technical Specifications. 2017. Available online: http://www.robotshop.com/media/files/pdf/hokuyo-uhg-08lx-overview.pdf (accessed on 7 August 2017).
- Quigley, M.; Conley, K.; Gerkey, B.P.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- ViSP. Visp: Visual Servoing Platform. 2017. Available online: https://visp.inria.fr/ (accessed on 1 January 2017).
- Spindler, F.; Novotny, F. Visp Auto Tracker. 2017. Available online: http://wiki.ros.org/visp_auto_tracker (accessed on 1 January 2017).
- Hartley, R.I.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: New York, NY, USA, 2004; ISBN 0521540518. [Google Scholar]
- Zaitsev, S. Jsmn Open Source JSON C Parser, 2015. Available online: https://bitbucket.org/zserge/jsmn/wiki/Home (accessed on 9 October 2015).
- Birk, A.; Carpin, S. Merging Occupancy Grid Maps from Multiple Robots. Proc. IEEE 2006, 94, 1384–1397. [Google Scholar] [CrossRef]
- Saeedi, S.; Trentini, M.; Li, H. A hybrid approach for multiple-robot SLAM with particle filtering. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 3421–3426. [Google Scholar]
- Bonanni, T.M.; Corte, B.D.; Grisetti, G. 3-D Map Merging on Pose Graphs. IEEE Robot. Autom. Lett. 2017, 2, 1031–1038. [Google Scholar] [CrossRef]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An Efficient Probabilistic 3D Mapping Framework Based on Octrees. Auton. Robot. 2013, 34, 189–206. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Obstacles | Experiment 1 | Experiment 2 | |||
|---|---|---|---|---|---|
| (x, y) | (Width × Breadth) | (x, y) | (Width × Breadth) | ||
| Obstacle 1 | (231, 152) | () | (394, 685) | () | |
| Obstacle 2 | (308, 129) | () | (493, 650) | () | |
| Obstacle 3 | (376, 150) | () | (632, 698) | () | |
| Obstacle 4 | − | − | (795, 646) | () | |
| Obstacle 5 | − | − | (931, 682) | () | |
| Obstacle 6 | − | − | (1075, 654) | () | |
| Exp | Obstacles | Time to | Time to | Waiting Time | Delay of | Delay of |
|---|---|---|---|---|---|---|
| Yes/No | Couple | Decouple | of Hitchhiker | Driver | Hitchhiker | |
| Exp 1 | No | 15.00 s | 17.67 s | 19.33 s | 32.67 s | 52.00 s |
| Yes | 15.33 s | 22.00 s | 21.67 s | 37.33 s | 59.00 s | |
| Exp 2 | No | 33.00 s | 19.00 s | 11.33 s | 52.00 s | 63.33 s |
| Yes | 35.00 s | 21.67 s | 10.67 s | 56.67 s | 67.33 s |
| Scheme | Robot | PP | OBS | LZN | MAP | COM | VS |
|---|---|---|---|---|---|---|---|
| Traditional | R1 | On | On | On | On | On | Off |
| R2 | On | On | On | On | On | Off | |
| Hitchhiking | R1 | On | On | On | On | On | Off |
| R2 | Off | Off | Off | Off | On | On |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Emaru, T. Hitchhiking Robots: A Collaborative Approach for Efficient Multi-Robot Navigation in Indoor Environments. Sensors 2017, 17, 1878. https://doi.org/10.3390/s17081878
Ravankar A, Ravankar AA, Kobayashi Y, Emaru T. Hitchhiking Robots: A Collaborative Approach for Efficient Multi-Robot Navigation in Indoor Environments. Sensors. 2017; 17(8):1878. https://doi.org/10.3390/s17081878
Chicago/Turabian StyleRavankar, Abhijeet, Ankit A. Ravankar, Yukinori Kobayashi, and Takanori Emaru. 2017. "Hitchhiking Robots: A Collaborative Approach for Efficient Multi-Robot Navigation in Indoor Environments" Sensors 17, no. 8: 1878. https://doi.org/10.3390/s17081878
APA StyleRavankar, A., Ravankar, A. A., Kobayashi, Y., & Emaru, T. (2017). Hitchhiking Robots: A Collaborative Approach for Efficient Multi-Robot Navigation in Indoor Environments. Sensors, 17(8), 1878. https://doi.org/10.3390/s17081878