Localization of Ferromagnetic Target with Three Magnetic Sensors in the Movement Considering Angular Rotation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Localization Algorithm Description
2.1. The Model of Magnetic Dipole
2.2. The Rotation Angle Between the Magnetic Dipole and Sensor Array
2.3. The Locating Model of Magnetic Field Signal
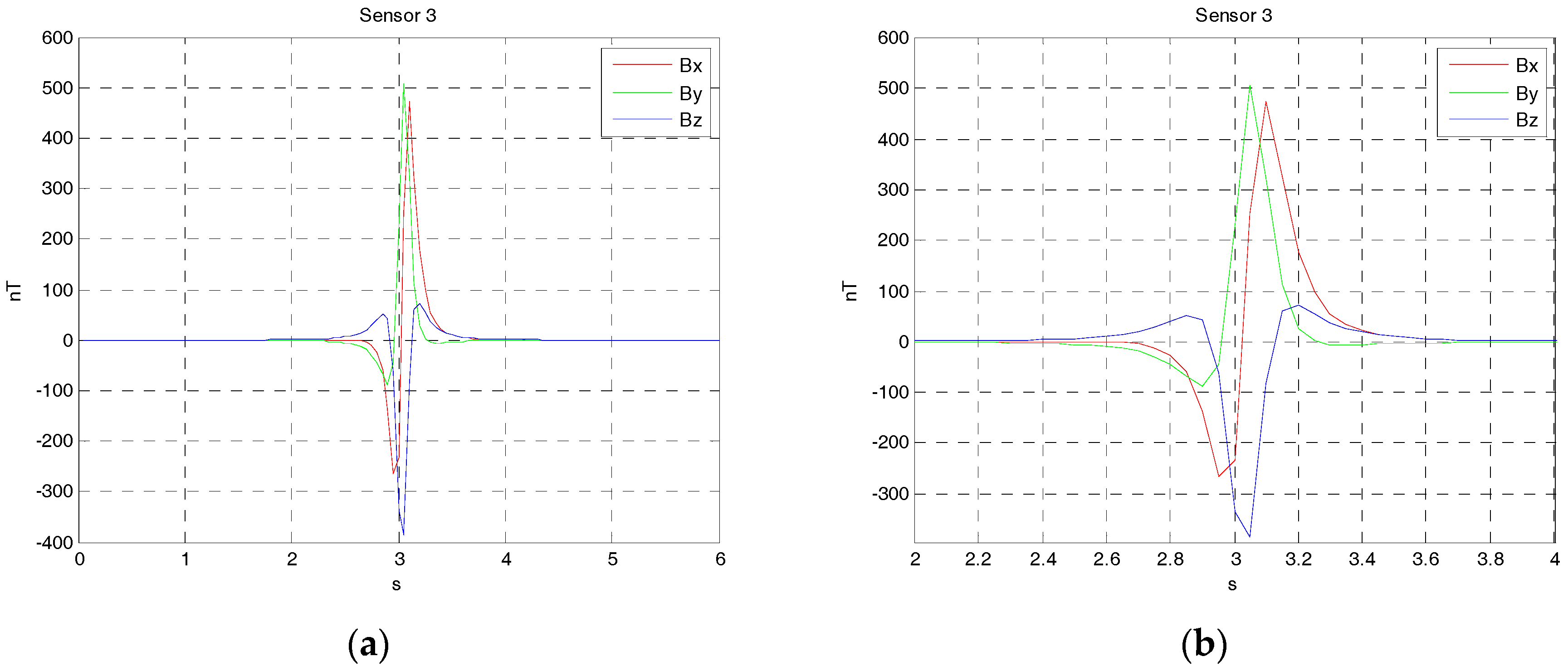
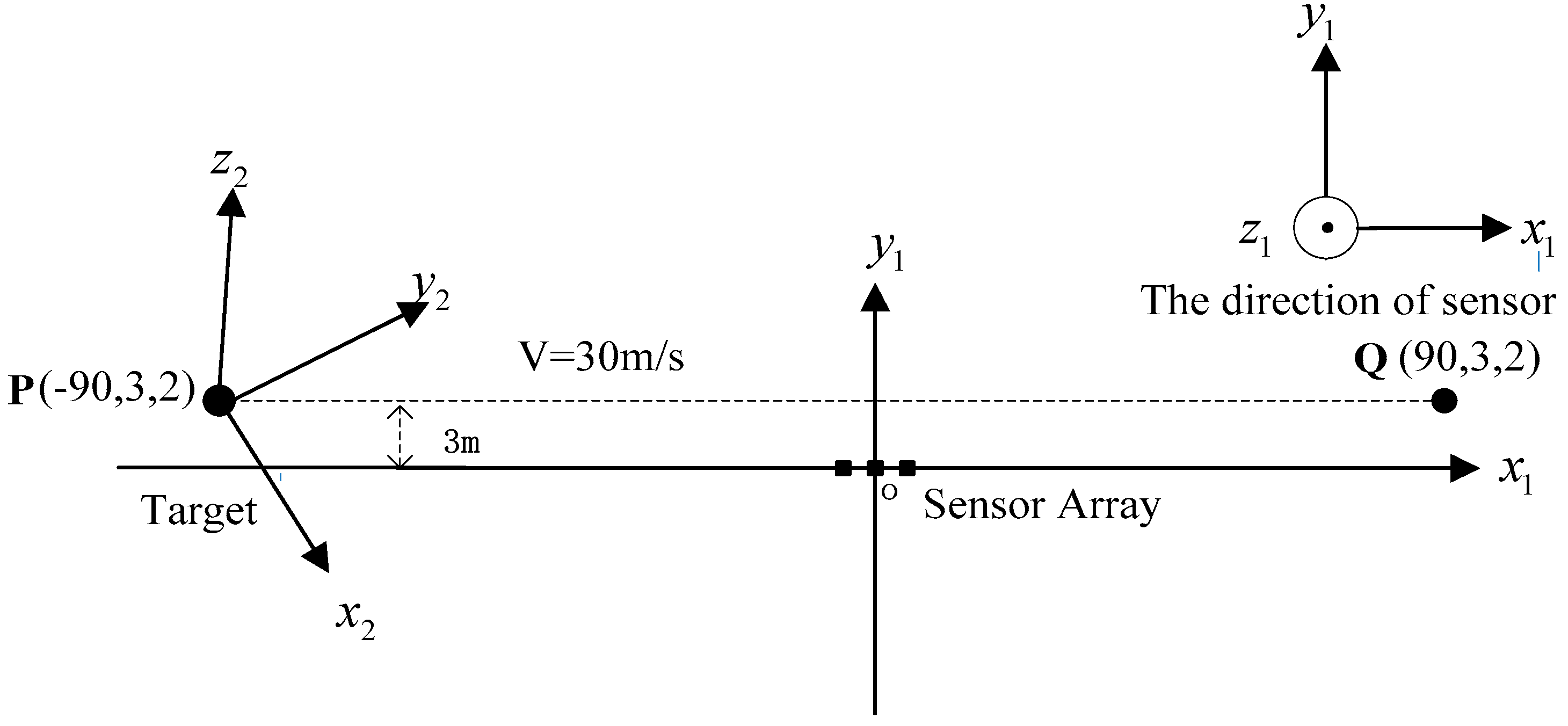
3. Simulations
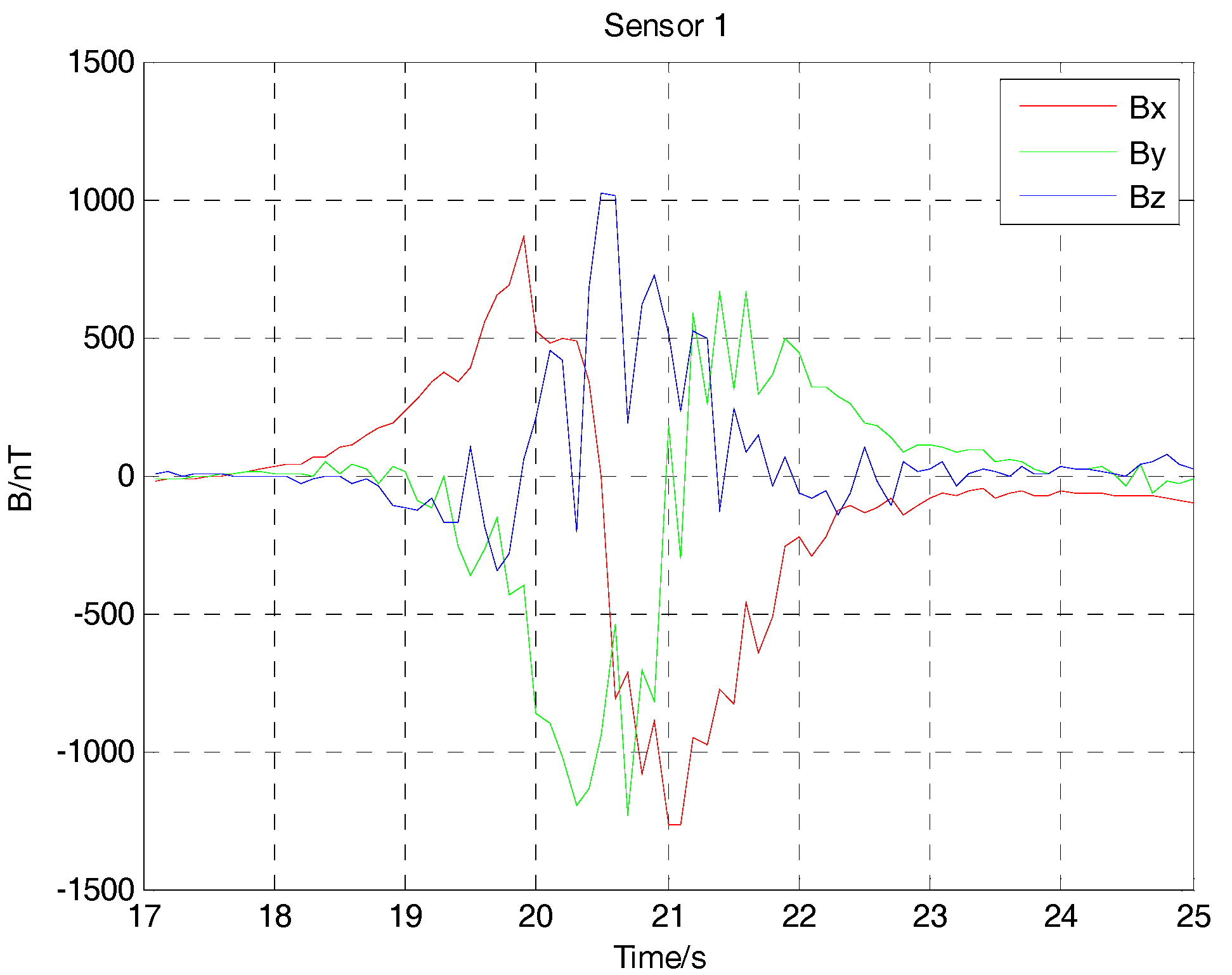
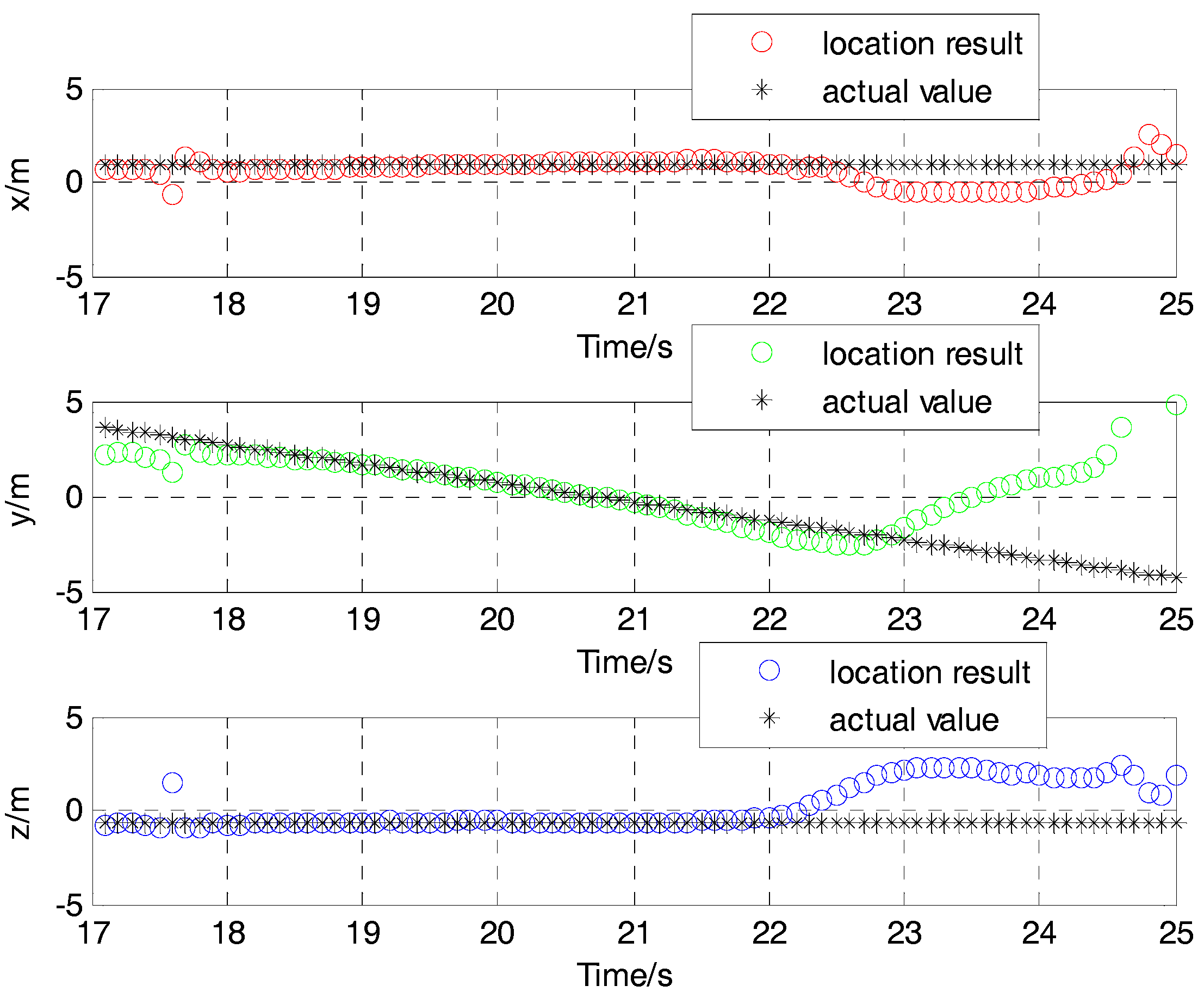
4. Experimental Tests
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Merlat, L.; Naz, P. Magnetic localization and identification of vehicles. Appl. Proc. SPIE 2003, 5090, 174–185. [Google Scholar]
- Wynn, W.M. Magnetic dipole localization using the gradient rate tensor measured by a five-axis gradiometer with known velocity. In Proceedings of the SPIE’s 1995 Symposium on OE/Aerospace Sensing and Dual Use Photonics, Orlando, FL, USA, 30 May 1995. [Google Scholar]
- Wynn, W.; Frahm, C.; Carroll, P.; Clark, R.; Wellhoner, J.; Wynn, M. Advanced superconducting gradiometer/magnetometer arrays and a novel signal processing technique. IEEE Trans. Magn. 1975, 11, 701–707. [Google Scholar] [CrossRef]
- Heath, P.; Henson, G.; Greenhalgh, S. Some comments on potential field tensor data. Explor. Geophys. 2003, 34, 57–62. [Google Scholar] [CrossRef]
- Takaaki, N.; Satoshi, S.; Shigeru, A. A closed form formula for magnetic dipole localization by measurement of its magnetic field and spatial gradients. IEEE Trans. Magn. 2006, 42, 3291–3293. [Google Scholar]
- Arie, S.; Boaz, L.; Nizan, S.; Boris, G.; Lev, F.; Ben-Zion, K. Localization and magnetic moment estimation of a ferromagnetic target by simulated annealing. Meas. Sci. Technol. 2007, 18, 3451–3457. [Google Scholar]
- Wei, Y.L.; Xiao, C.H.; Chen, J.C.; Xie, J.H. A new magnetic localization method based on vessel's vertical magnetic field. J. Nav. Univ. Eng. 2009, 21, 21–25. [Google Scholar]
- Oruc, B. Location and depth estimation of point-dipole and line of dipoles using analytic signals of the magnetic gradient tensor and magnitude of vector components. J. Appl. Geophys. 2010, 70, 27–37. [Google Scholar] [CrossRef]
- Tang, L.L.; Song, Y.; Tong, G.J.; Liu, S.; Li, B.Q.; Yuan, X.B. A novel localization algorithm for mobile magnetic targets. Chin. J. Sens. Actuators 2011, 24, 996–1000. [Google Scholar]
- Yu, Z.T.; Lv, J.W.; Zhang, B.T. A method to localize magnetic target based on a seabed array of magnetometers. J. Wuhan Univ. Technol. 2012, 34, 131–135. [Google Scholar]
- Wahlstrom, N.; Gustafsson, F. Magnetometer modeling and validation for tracking metallic targets. IEEE Trans. Signal Process. 2014, 62, 545–556. [Google Scholar] [CrossRef]
- Roger, A.; Eyal, W.; Tsuriel, R.C.; Nir, G.; Idan, Y. A dedicated genetic algorithm for localization of moving magnetic objects. Sensors 2015, 15, 23788–23804. [Google Scholar]
- Han, J.; Jiao, G.T.; Zhang, Y.J.; Di, Z.Q. Test and calculating method for motion parameters of underwater project based on magnetic gradient model. J. N. Univ. Chin. 2015, 36, 289–299. [Google Scholar]
- Gao, X.; Yan, S.G.; Li, B. A novel method of localization for moving objects with an alternating magnetic field. Sensors 2017, 17, 923. [Google Scholar] [CrossRef] [PubMed]
- Gao, X.; Yan, S.G.; Li, B. Study of a hybrid for localization of mobile target by a single fuxgate. J. Dalian Univ. Technol. 2016, 56, 292–298. [Google Scholar]




















© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, X.; Yan, S.; Li, B. Localization of Ferromagnetic Target with Three Magnetic Sensors in the Movement Considering Angular Rotation. Sensors 2017, 17, 2079. https://doi.org/10.3390/s17092079
Gao X, Yan S, Li B. Localization of Ferromagnetic Target with Three Magnetic Sensors in the Movement Considering Angular Rotation. Sensors. 2017; 17(9):2079. https://doi.org/10.3390/s17092079
Chicago/Turabian StyleGao, Xiang, Shenggang Yan, and Bin Li. 2017. "Localization of Ferromagnetic Target with Three Magnetic Sensors in the Movement Considering Angular Rotation" Sensors 17, no. 9: 2079. https://doi.org/10.3390/s17092079
APA StyleGao, X., Yan, S., & Li, B. (2017). Localization of Ferromagnetic Target with Three Magnetic Sensors in the Movement Considering Angular Rotation. Sensors, 17(9), 2079. https://doi.org/10.3390/s17092079