1. Introduction
With the continual development of information technology and smart phones worldwide, the Global Positioning System (GPS) is being used increasingly in daily life. Although GPS can accurately and reliably locate signals in indoor environments, it cannot penetrate thick walls and cannot be used effectively indoors. Therefore, indoor positioning requires further study.
In recent years, many indoor positioning technologies have been proposed, such as Radio Frequency, Infrared, Ultrasound, Optical, and Magnetic Field Strength with the relevant positioning calculation mechanism [
1]. The main types of indoor positioning algorithmic mechanisms are triangulation location and fingerprint positioning. Received signal strength (RSS)-based location fingerprinting is one of the most popular methods in indoor positioning [
2]. RSS location fingerprints are a unique set of RSS signal values for each location. An RSS fingerprinting database is initially created for mapping the relationships between each physical location and its unique RSS fingerprint. The RSS fingerprint of the device location is matched to the information in the RSS fingerprint database, and then the location of the most similar entry to the sample is chosen as the estimated location [
3]. This method has two phases: offline training phase and online position estimation phase. The offline training phase measures the positioning environment, collects signal strength values of each position in the target positioning area, and finally saves the collected data to establish a fingerprint database. The online position estimation stage matches the received real-time signal strength values with the fingerprint database established in the offline stage during positioning [
4].
The main problem in RSS-based fingerprint recognition is that RSS values of any location can be affected easily by factors, such as multiple paths, shadow effects, and crowd interference. This means that RSS values that are measured at the same location at different times may show differences [
4,
5]. The RSS fingerprint that was obtained at different times may not match the previous fingerprint stored in the database, leading to incorrect estimation results. In other words, the data in the fingerprint database is actually static data, and the real-time positioning value is dynamic data. When we measure RSS fingerprint samples at the test position, the localization algorithm may match an incorrect estimated location from the static database [
3,
5]. Although the matching fingerprint data appears to be the most likely data in the fingerprint database, the corresponding physical location of the fingerprint may be very far from the physical location corresponding to the correct fingerprint data. Therefore, before repositioning, finding the fingerprints of each position in the entire positioning area once again enables very accurate positioning. However, doing so is costly and time-consuming when the positioning area is very large. In particular, it is impractical to continually update the fingerprint database in an area where the interference continues to change [
6].
Gaussian process regression (GPR) can solve the abovementioned problem of high costs in offline measurement data. In this approach, the calibration effort and costs of building the RSS signature map are reduced by using the model signal strength that was obtained using an advanced Gaussian process (GP), and the problems faced with the RSS signature map are solved in the online phase [
7]. GP is a nonparametric model that is completely characterized by its average function and covariance matrix [
8]. Some studies have used a GP to generate a fingerprint database in the offline phase [
7]. Farid et al. (2013) demonstrated how to use a GP to generate likelihoods at locations for which no calibration data were available, and they proved that Gaussian regression could be applied successfully to various localization problems [
9]. Fernando Seco et al. (2010) proposed the use of an observation model that is based on GP nonparametric regression to represent the RSS distribution of the specific environment of each RFID tag [
10]. Aravecchia et al. (2014) proposed the use of GP to interpolate the signal vector received in the offline stage to estimate the device position during the test [
11]. These studies have proved that GPR is a viable means of improving positioning accuracy and reducing the cost of collecting fingerprinting data. Furthermore, Bisio et al. (2017) defined two-folded methods to solve the location problem. First, a Gaussian Process (GP) is used during the training (offline) phase of an indoor positioning algorithm to generate the fingerprint database. Furthermore, during the positioning (online) phase, and a smart algorithm used for reducing the computation effort for positioning calculation [
12]. On the contrary, when considering indoor dynamic surveying data for this purpose, the Gaussian process regression based radio-map construction method exploiting both realistic and virtual indoor dynamic surveying data is proposed and evaluated in [
13]. The results show that this method can obtain not only high accuracy but also high availability in the indoor service area, even though the realistic indoor surveying data is rare. Seco et al. (2010) present a Bayesian method for an indoor RFID location system that uses an observation Gaussian processes nonparametric regression model to represent the environment-specific RSS distributions for the individual RFID tags [
10].
Yiu et al. (2015) used GPR for RSS indication (RSSI) prediction to solve indoor location problems [
14]. First, they took partial measurements from the area of interest. They then used the Firefly algorithm to train and categorize the prior results derived using GPR. The trained results were used to build a refined fingerprinting database for the entire area of interest. The experiment showed that the GPR model could achieve a satisfactory result in predicting the RSS of an area with no prior measures. However, according to [
10], the ability to expand the GPR model is restricted by the need to rebuild the fingerprinting database; in addition, the flexibility in the computation of the GPR models was limited in their study [
7]. In [
7], Liu et al. (2016) improved the GPR system and proposed the GPRP system. In GPRP, the GP prior distribution was used for regression and for predicting the RSS at locations with no prior measurements, and the naive Bayes algorithm was used to derive the obtained conditional Gaussian probability. It overcame previous shortcomings and it precluded the need to establish a fingerprint database. When compared with Yiu’s method, the calculation was simplified, thereby saving time and cost, and the positioning results were more accurate. However, in the prediction, the values of position information
x and
y need to be calculated separately (the probability interval of both
x and
y needs to be found, and then, naive Bayes is used to select the most possible position information in the interval), and GPRP cannot directly draw (
x,y) as the positioning process is cumbersome. Therefore, to directly obtain the
x and
y values and further improve the positioning accuracy, in our study, the authors used a model that was based on the deep Gaussian process regression (DGPR) model to perform positioning through mobile phone on both simulated and physical environments.
The remainder of this manuscript is organized as follows.
Section 2 reviews related studies on the properties of RSSI for signal transmission and defines GP and DGP.
Section 3 describes the DGPR measurement system used in the current study and describes the data analysis method.
Section 4 discusses the experiments that were performed in the simulated and real environments. Finally,
Section 5 presents the conclusions of this study and provides recommendations for future research.
5. Conclusions
Generally, the main challenge in RSS-based location positioning is the high sensitivity of the technique to environmental changes. Variations in RSS measurement reduce estimation accuracy. In other words, if the radio propagation signal strength were correlated with the distance between the transmitter and the receiver, then location determination would be a trivial problem. However, the relationship between these two parameters is dynamic rather than straightforward. Therefore, many methods have been proposed for obtaining location predictions when the receiver position is changing. One such basic method is using an FP database, which involves straight computations for RSS signal collection. However, time consumption and searching from the lookup table database are both bottlenecks in this method. In this study, we proposed an indoor positioning system that is based on the DGPR model. This method can improve both the computation time and the efficiency.
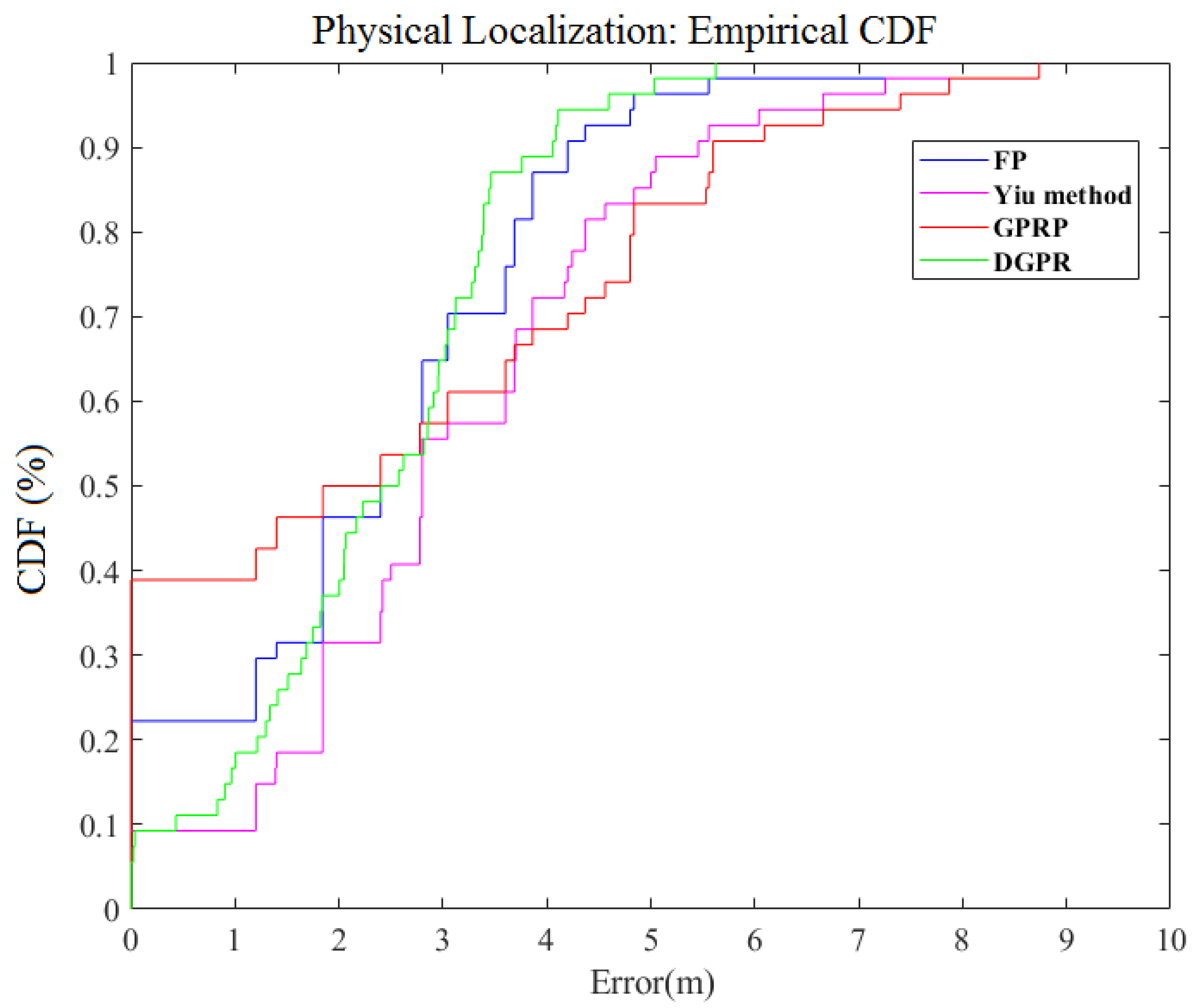
In our study, we tested our method by examining the
area in the 55th building of Tianjin University as a physical environment, and simulated environment with the
. square area by MATLAB. We tested the performances on the different GPR Kernels, and derived the accuracy and time consumption with four distinct methods, including the general FingerPrint method, Yiu method in [
14], GPRP method in [
7], and our proposed DGRP method. Finally, the robustness for location accuracy was evaluated. Depending on our testing results, the constant kernel is the most accurate on the first position test. We adopt the constant kernel as our major part in our system. Then, we compare the localization accuracy with four different methods. The results shown that our proposed method can not only save the computation time required for building the RSS FP database, but also retain the accuracy of online prediction with the average error 1.46 m, 4.88 m, 1.87 m, and 1.78 m, respectively, for the simulated environment, and 2.34 m, 3.09 m, 2.28 m, and 2.30 m, respectively, for the field environment. Furthermore, on the robustness comparison, the validation was performed according to the changing environment with light, medium, heavy, and super heavy crowds’ areas. According to the results, we can see that the positioning accuracy is nearly unchanged in both light and heavy crowds. Thus, the robustness can be regarded as keeping the nearest accuracy in our proposed method.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}