A Compact Impact Rotary Motor Based on a Piezoelectric Tube Actuator with Helical Interdigitated Electrodes


Abstract
:1. Introduction
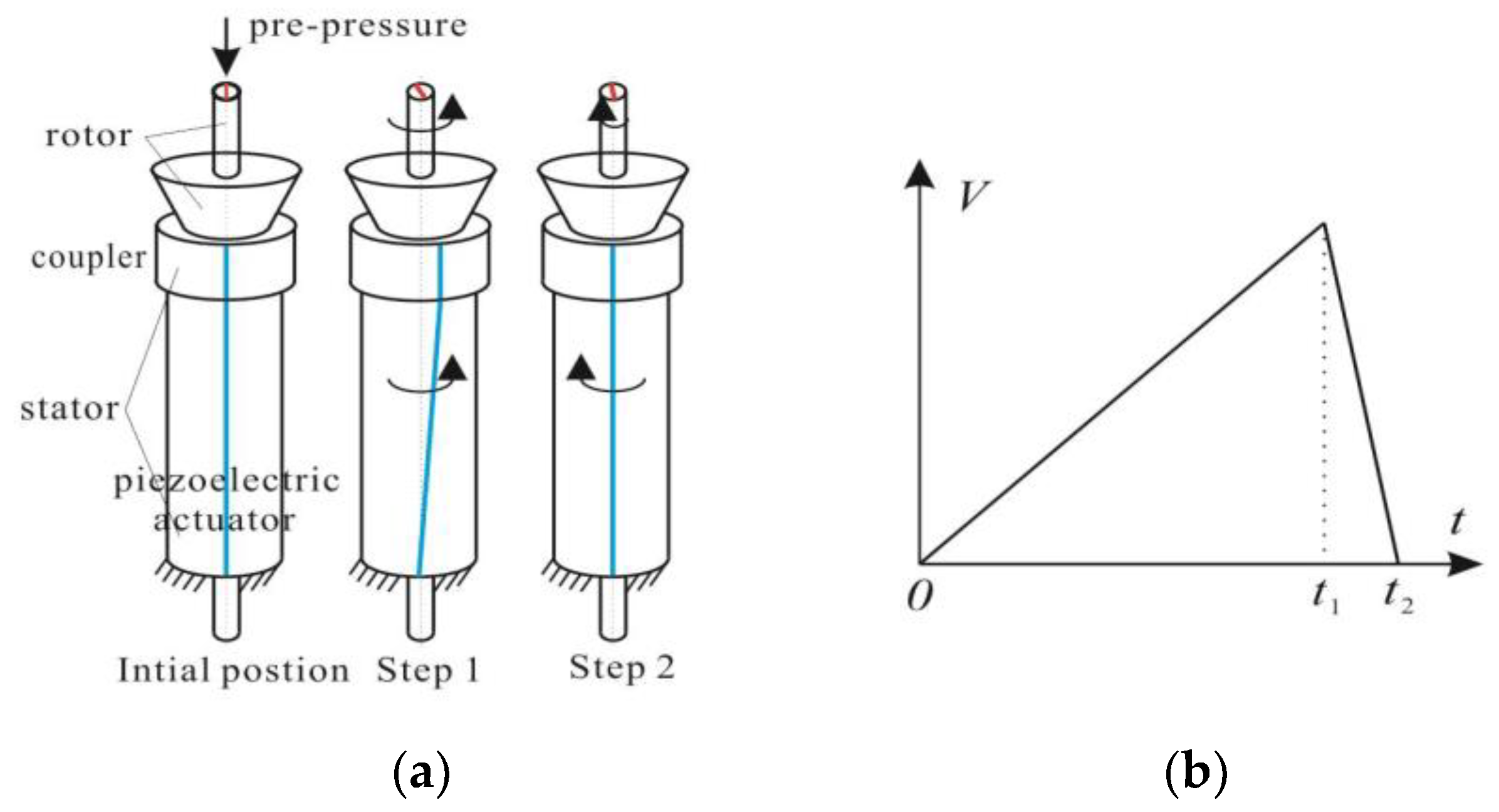
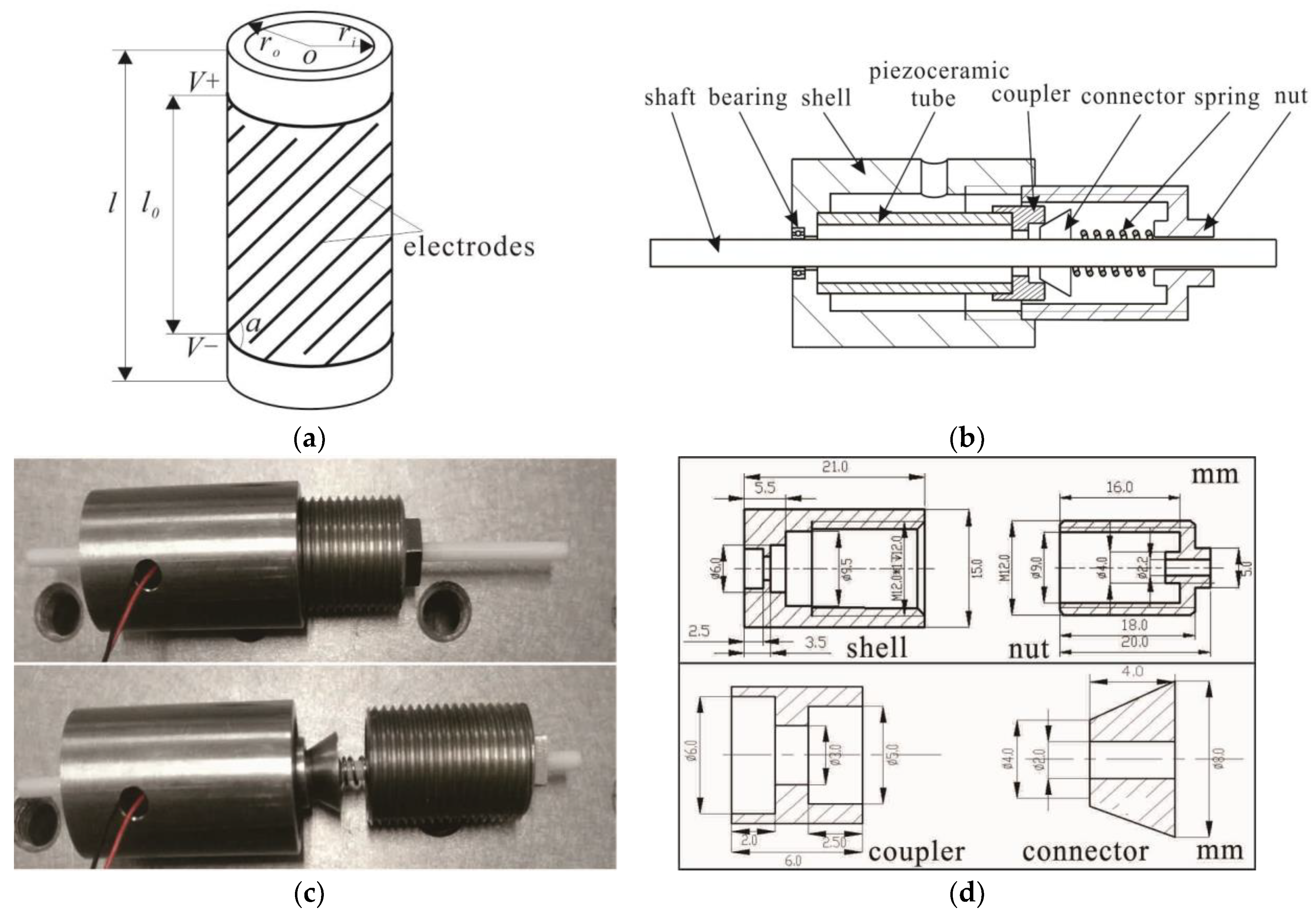
2. Working Principle, Structure Design, and Fabrication
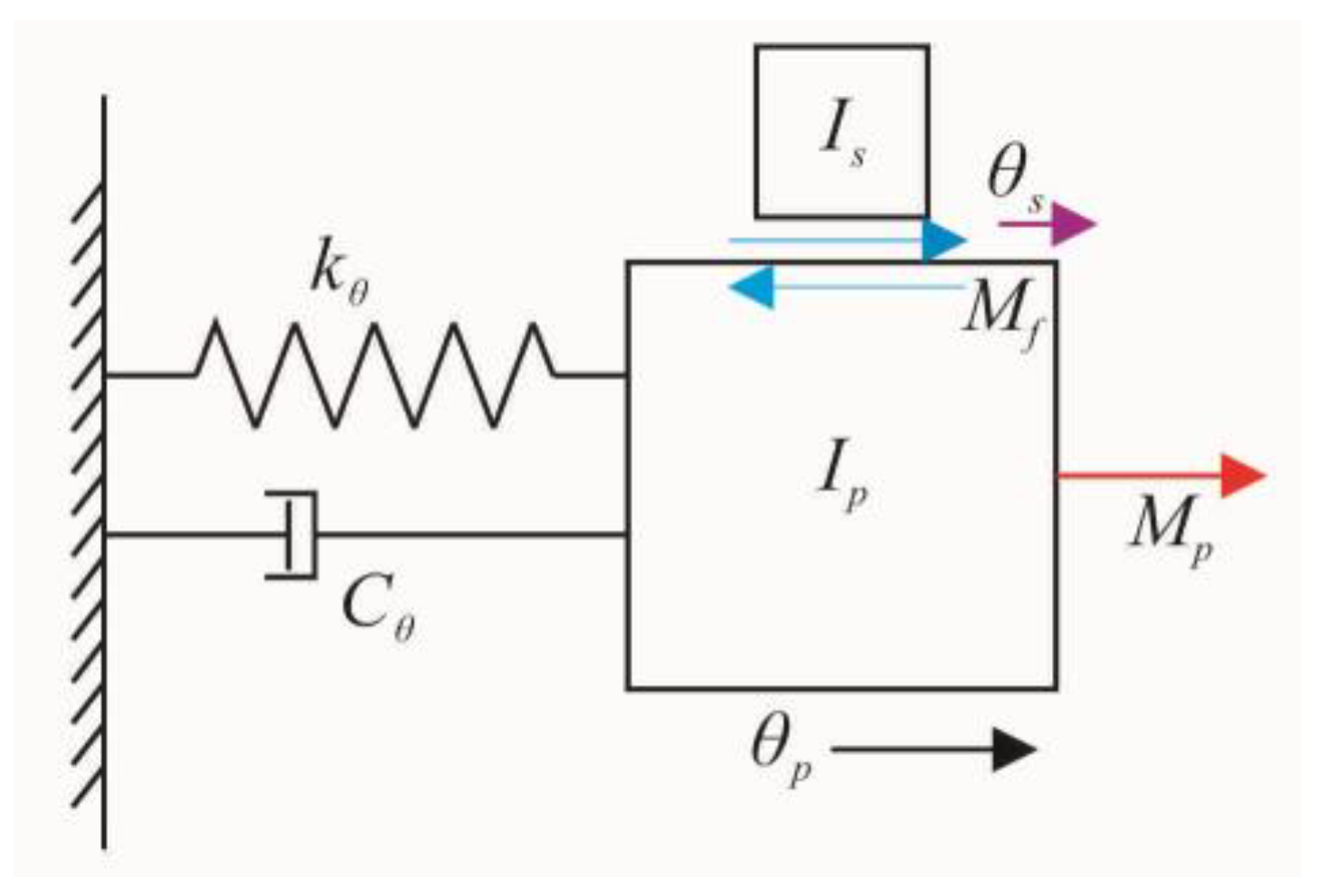
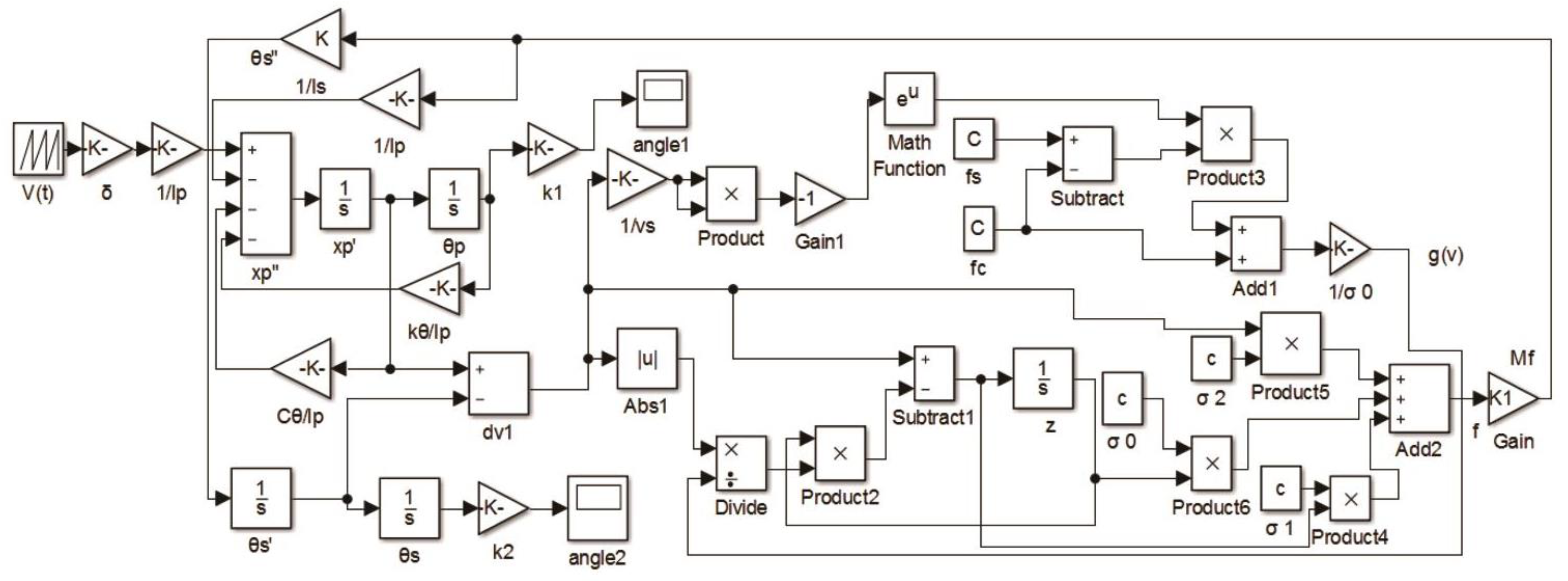
3. System Modeling and Dynamic Simulation
4. Prototype Tests and Results
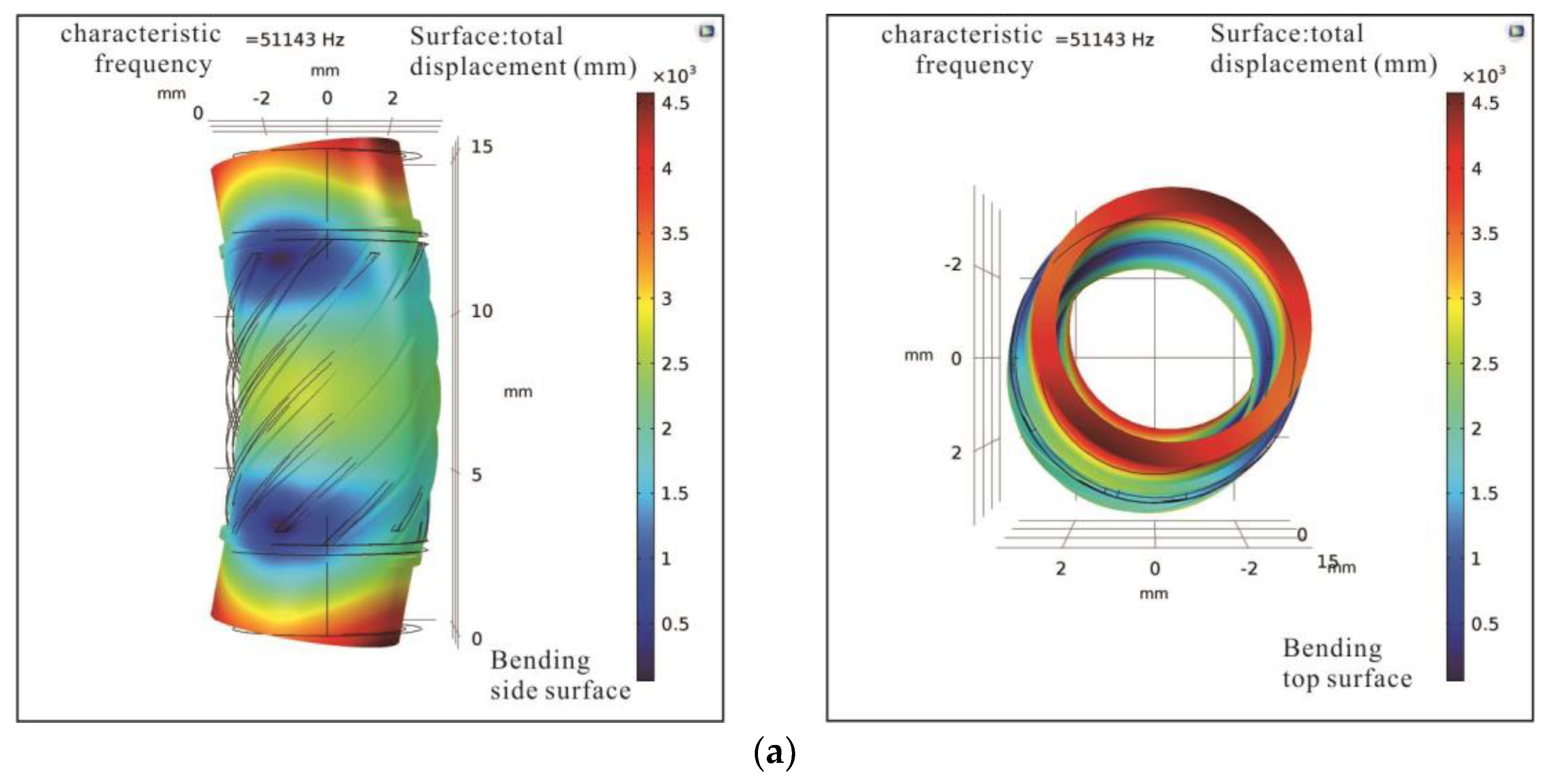
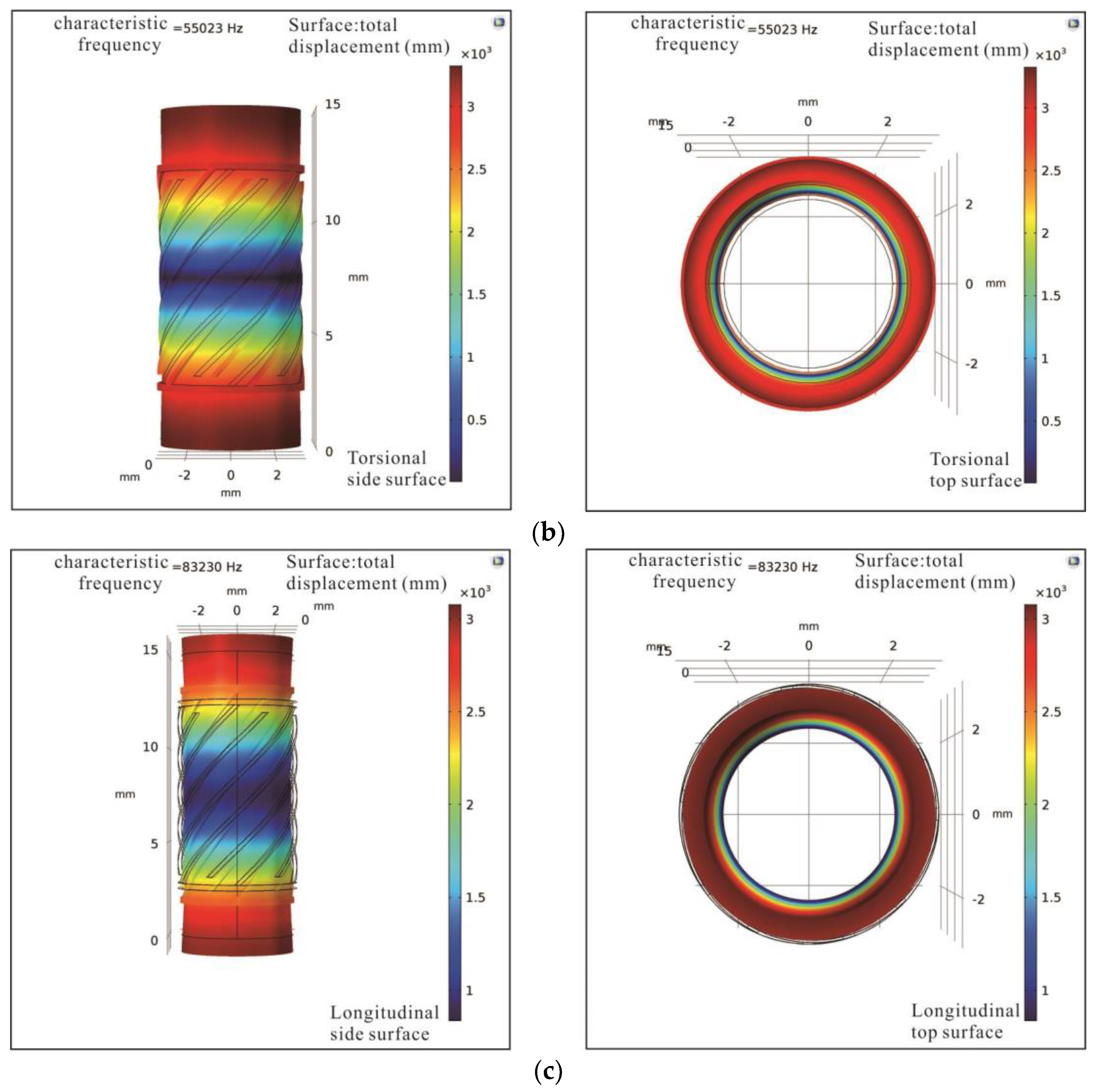
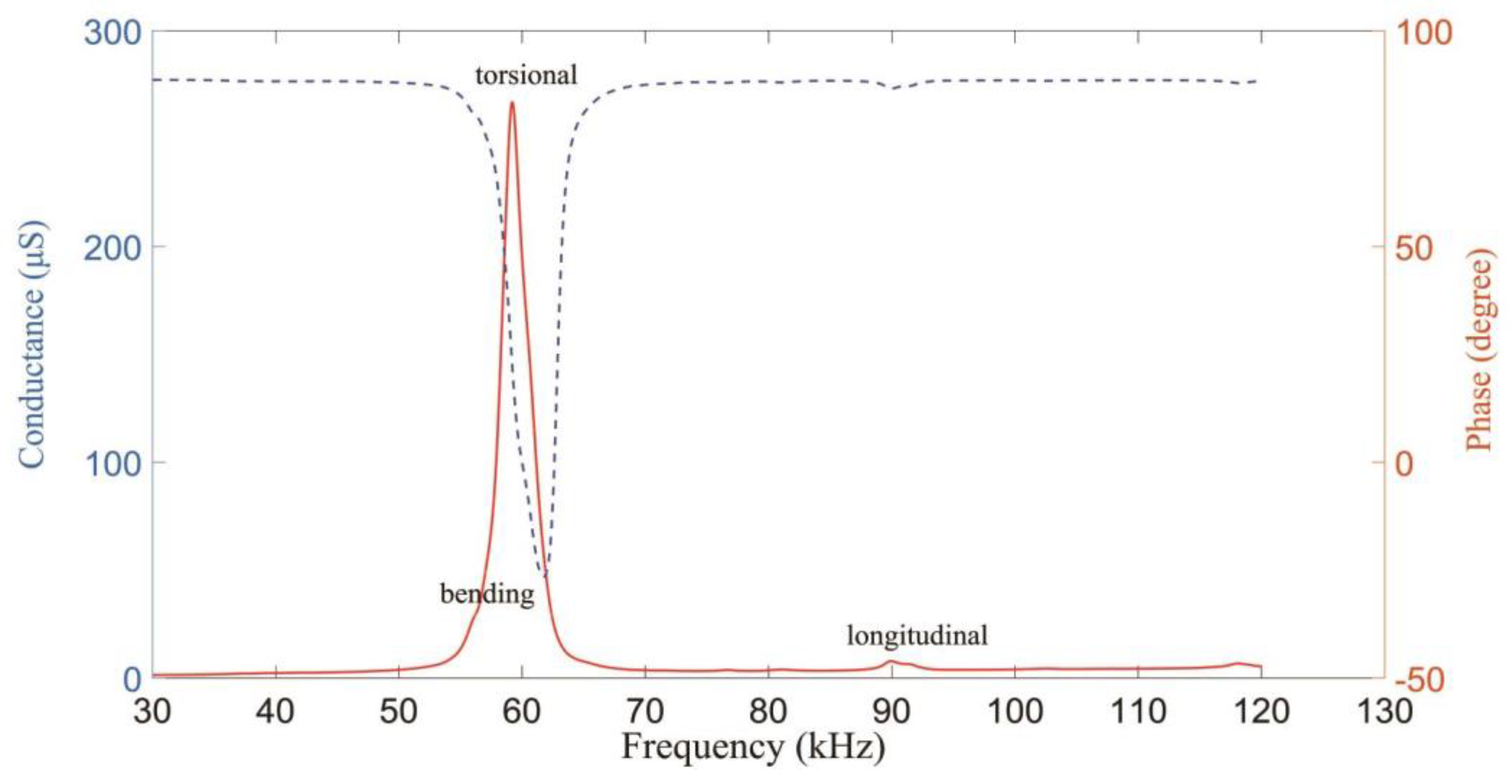
4.1. Analysis of Piezoelectric Tube Actuator and Simulation Parameters
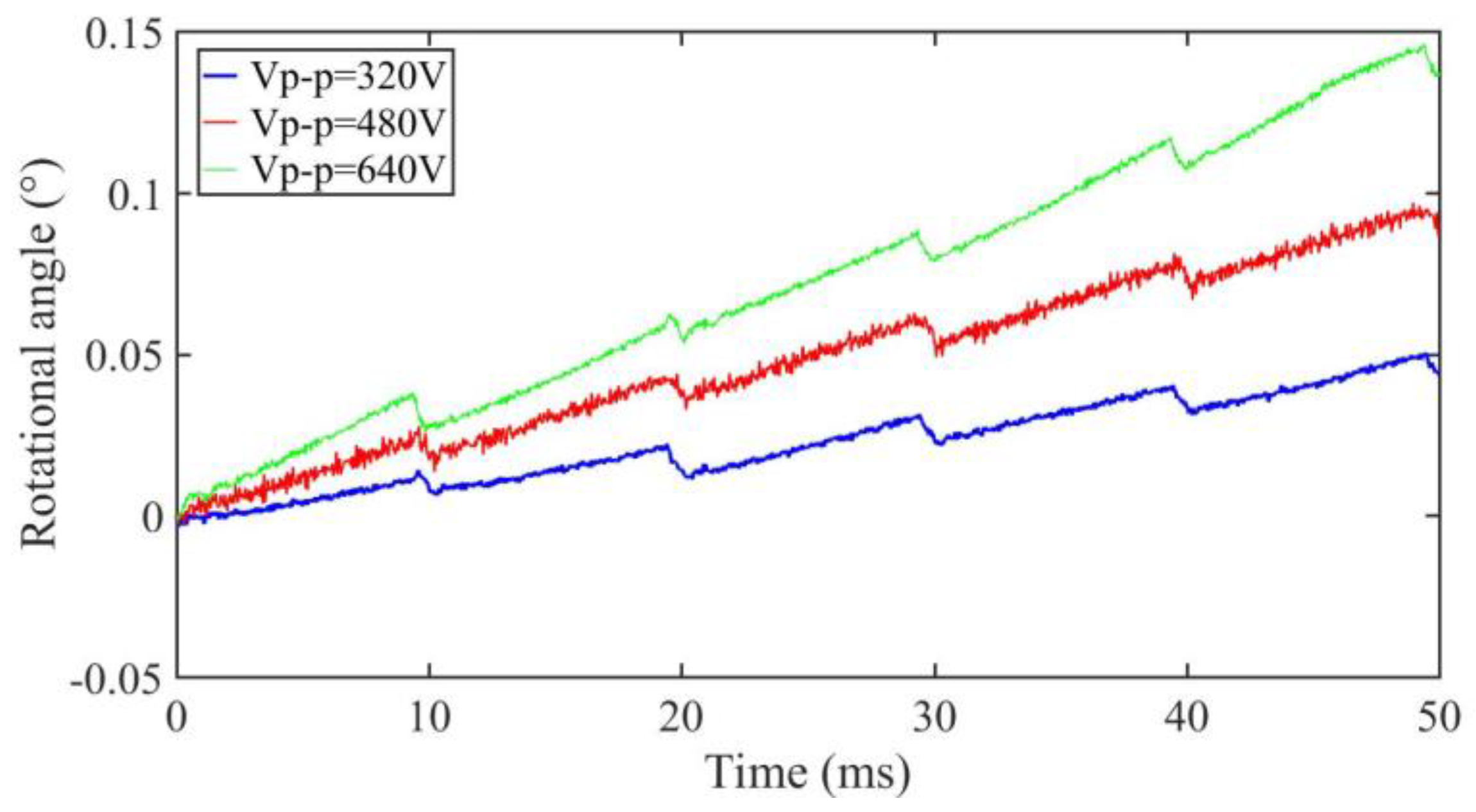
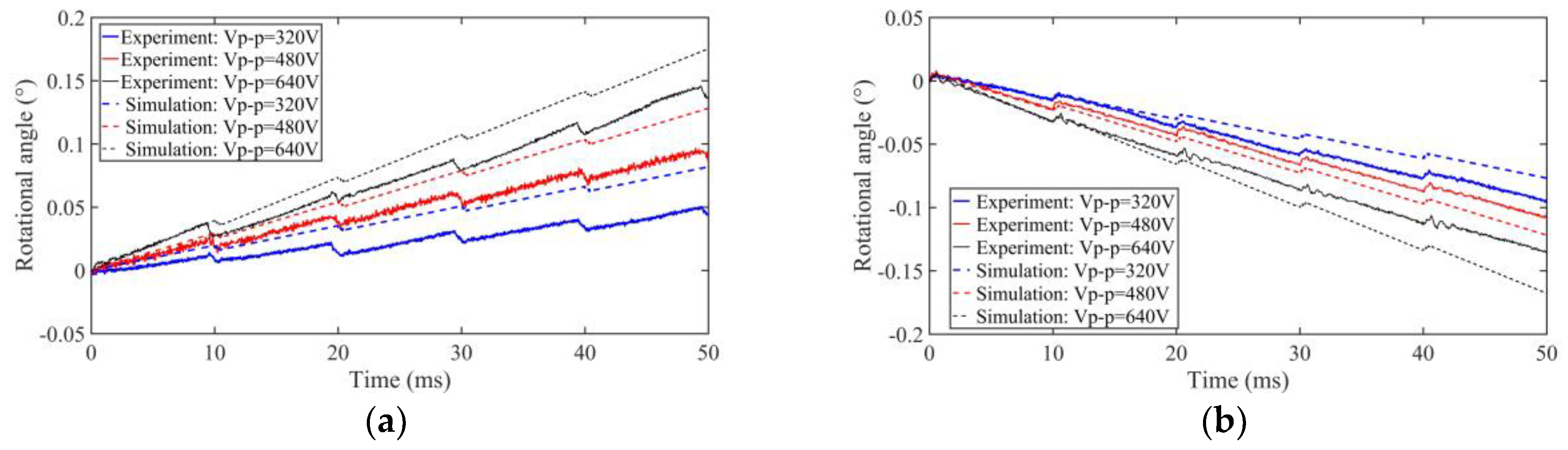
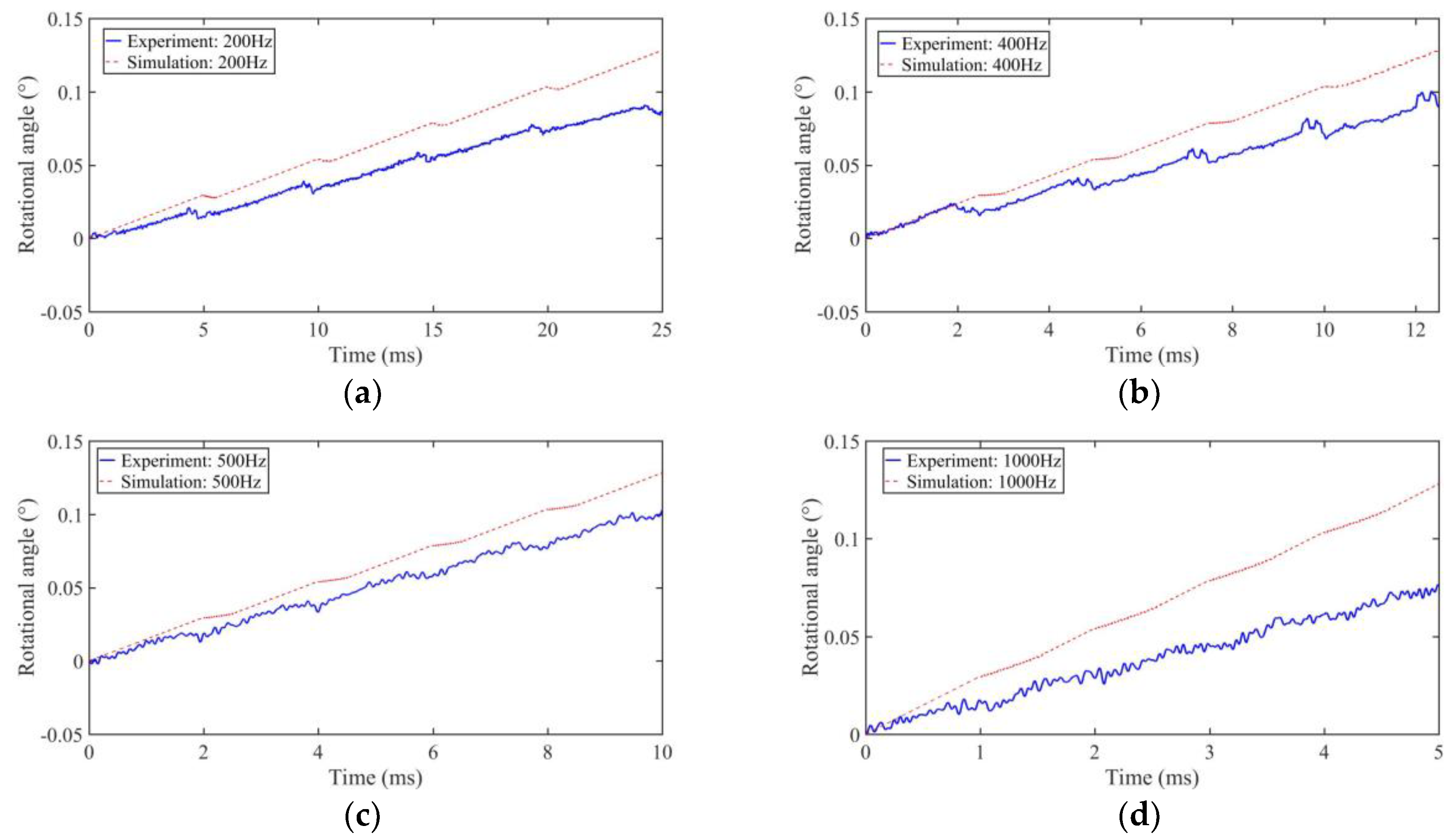
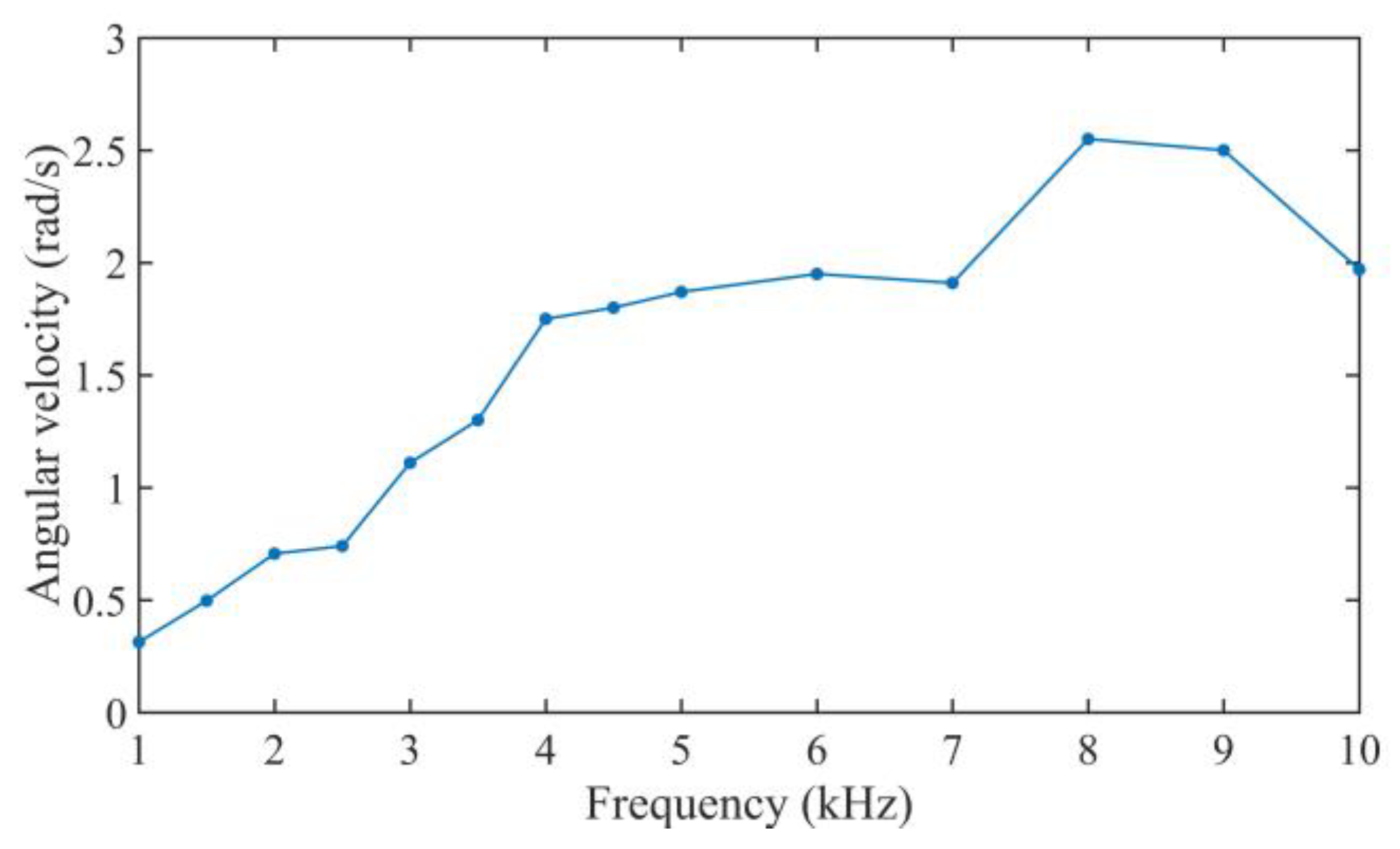
4.2. Stepping Characteristics of the Motor
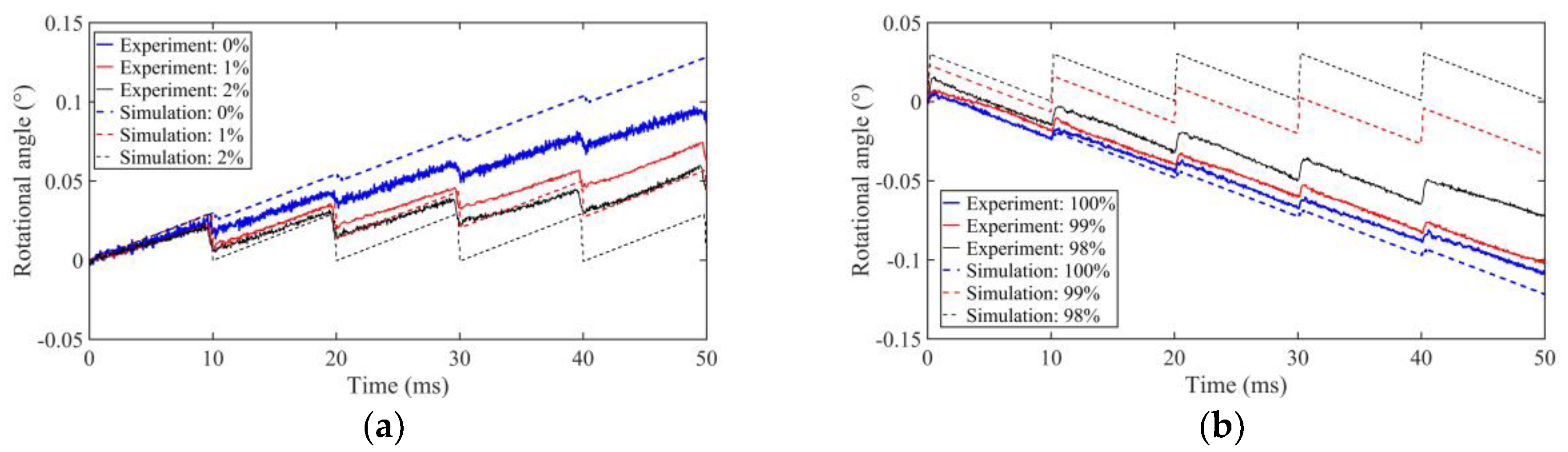
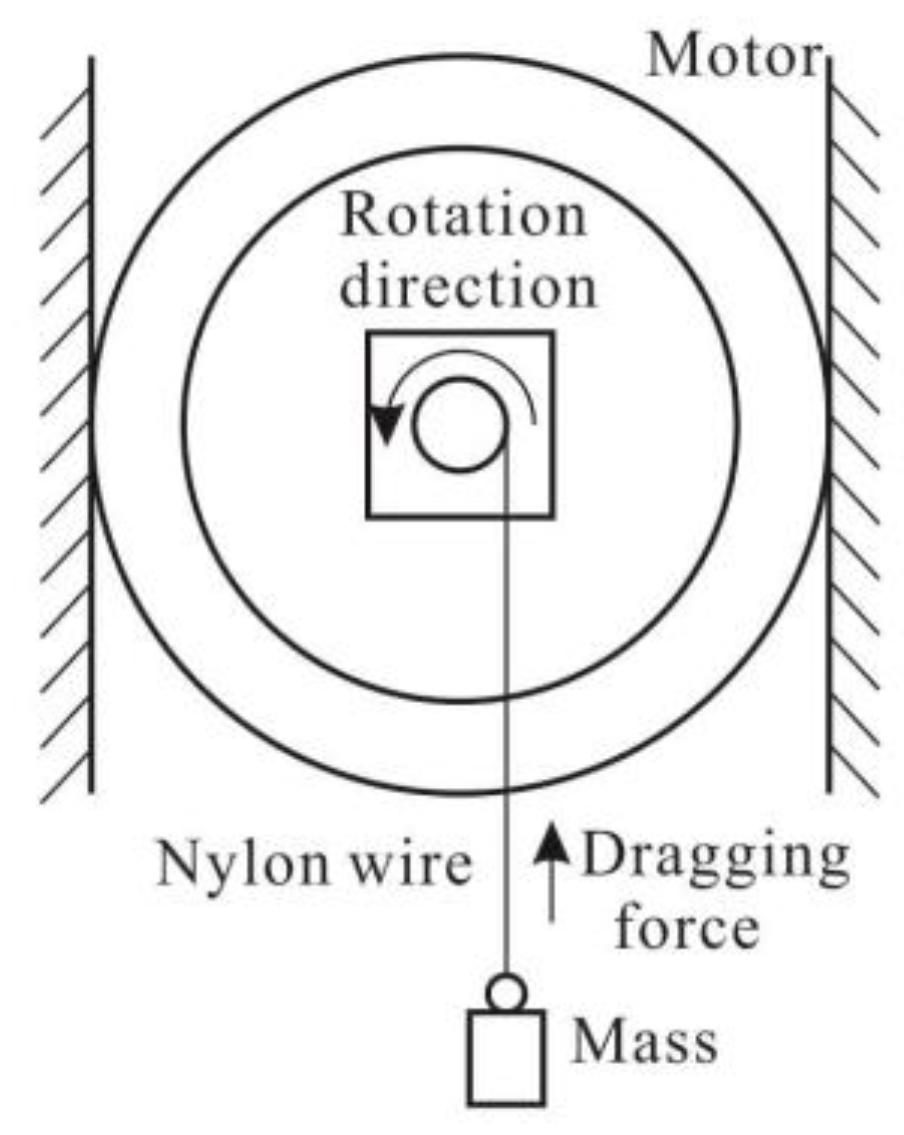
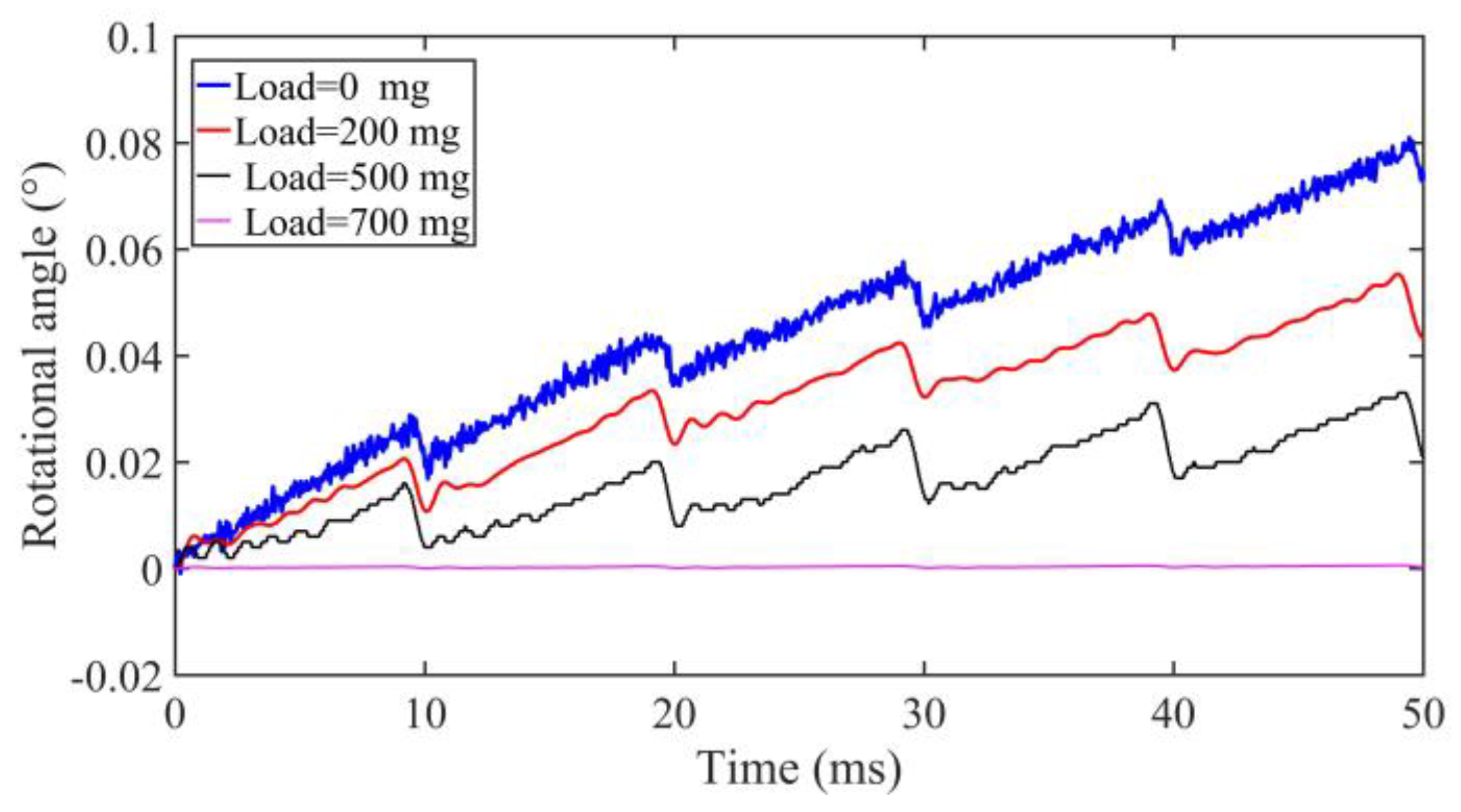
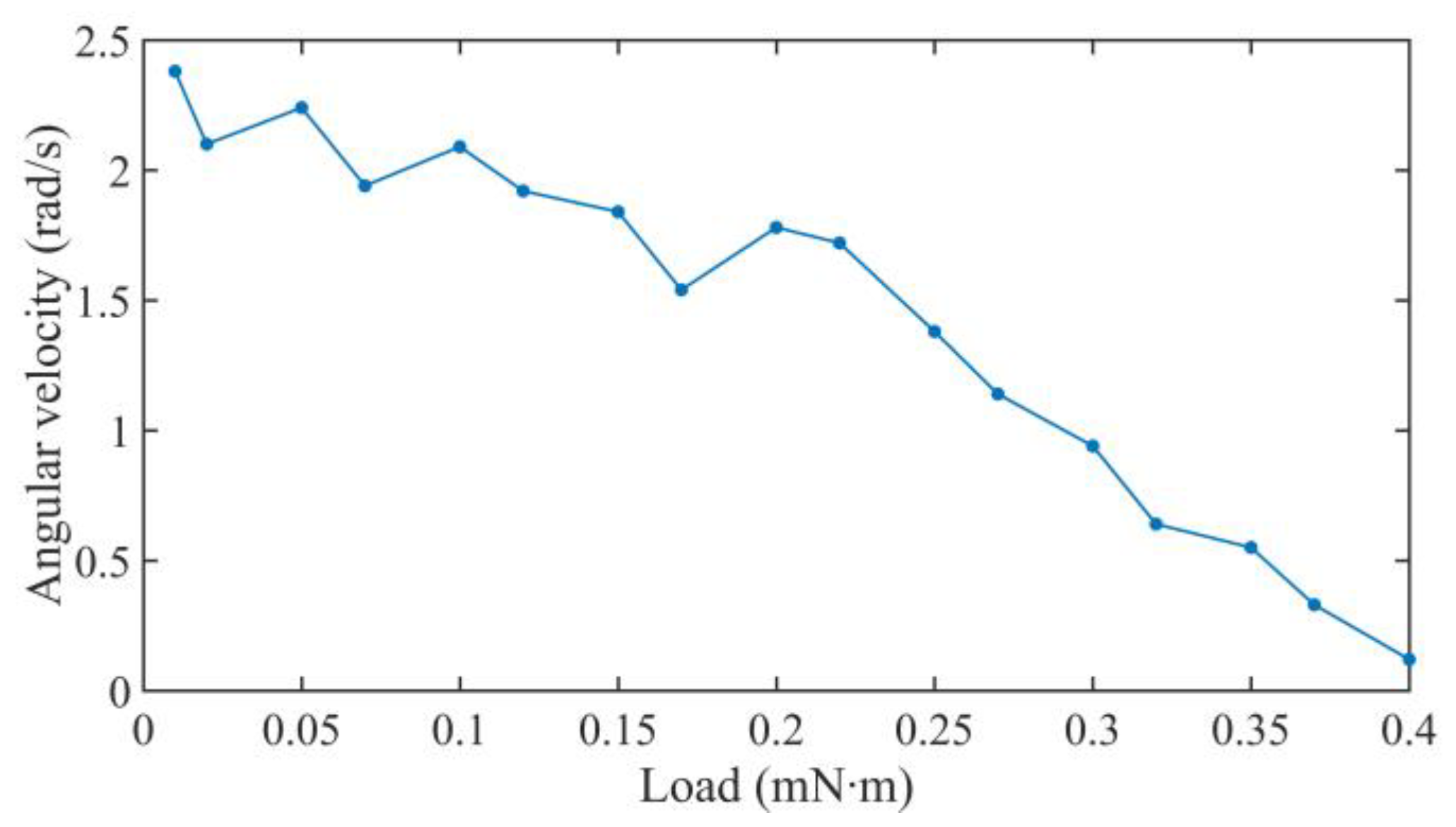
4.3. Loading Capacity
5. Discussions and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, J.; Hu, G.; Zhou, Y.; Zou, C.; Peng, W.; Alam, J.S. Study on temperature and synthetic compensation of piezo-resistive differential pressure sensors by coupled simulated annealing and simplex optimized kernel extreme learning machine. Sensors 2017, 17, 894. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Zhao, H.; Yang, Z.; Fan, Z.; Wang, S.; Shi, C.; Ma, Z. Design and analysis of a compact precision positioning platform integrating strain gauges and the piezoactuator. Sensors 2012, 12, 9697. [Google Scholar] [CrossRef] [PubMed]
- Kartik, V.; Wickert, J.A.; Sitti, M.; Son, K.J. An ultrasonic standing-wave-actuated nano-positioning walking robot: Piezoelectric-metal composite beam modeling. J. Vib. Control 2006, 12, 1293–1309. [Google Scholar] [CrossRef]
- Hariri, H.H.; Soh, G.S.; Foong, S.; Wood, K. Locomotion study of a standing wave driven piezoelectric miniature robot for bi-directional motion. IEEE Trans. Robot. 2017, 33, 742–747. [Google Scholar] [CrossRef]
- Dong, S.; Yan, L.; Viehland, D.; Jiang, X.; Hackenberger, W.S. A piezoelectric single crystal traveling wave step motor for low-temperature application. Appl. Phys. Lett. 2008, 92, 153504. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Zhao, H.; Shao, M.; Zhou, X.; Huang, H.; Fan, Z. Design and experiment performances of an inchworm type rotary actuator. Rev. Sci. Instrum. 2014, 85, 256. [Google Scholar] [CrossRef] [PubMed]
- Hunstig, M.; Hemsel, T.; Sextro, W. High-velocity operation of piezoelectric inertia motors: Experimental validation. Arch. Appl. Mech. 2016, 86, 1733–1741. [Google Scholar] [CrossRef]
- Ma, Y.; Shekhani, H.; Yan, X.; Choi, M.; Uchino, K. Resonant-type inertial impact motor with rectangular pulse drive. Sens. Actuators A Phys. 2016, 248, 29–37. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Zhao, H.; Shao, M.; Zhou, X.; Fan, Z. Design and experimental research of an improved stick-slip type piezo-driven linear actuator. Adv. Mech. Eng. 2015, 7. [Google Scholar] [CrossRef]
- Xu, L.; Xing, J. Forced response of the inertial piezoelectric rotary motor to electric excitation. J. Mech. Sci. Technol. 2015, 29, 4601–4610. [Google Scholar] [CrossRef]
- Tan, X.; Zhu, F.; Wang, C.; Yu, Y.; Shi, J.; Qi, X.; Yuan, F.; Tan, J. Two-dimensional micro-/nanoradian angle generator with high resolution and repeatability based on piezo-driven double-axis flexure hinge and three capacitive sensors. Sensors 2017, 17, 2672. [Google Scholar] [CrossRef]
- Huang, G.; Song, F.; Wang, X. Quantitative modeling of coupled piezo-elastodynamic behavior of piezoelectric actuators bonded to an elastic medium for structural health monitoring: A review. Sensors 2010, 10, 3681. [Google Scholar] [CrossRef] [PubMed]
- Zhu, W.L.; Zhu, Z.; Shi, Y.; Wang, X.; Guan, K.; Ju, B.F. Design, modeling, analysis and testing of a novel piezo-actuated xy compliant mechanism for large workspace nano-positioning. Smart. Mater. Struct. 2016, 25, 115033. [Google Scholar] [CrossRef]
- Yu, C.; Chen, X. State space system identification of 3-degree-of-freedom (dof) piezo-actuator-driven stages with unknown configuration. Actuators 2013, 2, 1–18. [Google Scholar] [CrossRef]
- Morita, T.; Yoshida, R.; Okamoto, Y.; Kurosawa, M.K. A smooth impact rotation motor using a multi-layered torsional piezoelectric actuator. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1999, 46, 1439–1445. [Google Scholar] [CrossRef] [PubMed]
- Friend, J.; Nakamura, K.; Ueha, S. A torsional transducer through in-plane shearing of paired planar piezoelectric elements. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2004, 51, 871–878. [Google Scholar] [CrossRef] [PubMed]
- Watson, B.; Friend, J.; Yeo, L. Brief communication: Piezoelectric ultrasonic resonant motor with stator diameter less than 250 µm: The proteus motor. J. Micromech. Microeng. 2009, 19, 22001–22005. [Google Scholar] [CrossRef]
- Wajchman, D.; Liu, K.C.; Friend, J.; Yeo, L. An ultrasonic piezoelectric motor utilizing axial-torsional coupling in a pretwisted non-circular cross-sectioned prismatic beam. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2008, 55, 832–840. [Google Scholar] [CrossRef] [PubMed]
- Tsujino, J.; Ueoka, T.; Otoda, K.; Fujimi, A. One-dimensional longitudinal-torsional vibration converter with multiple diagonally slitted parts. Ultrasonics 2000, 38, 72–76. [Google Scholar] [CrossRef]
- Lee, S.R.; Li, H.L. Development and characterization of a rotary motor driven by anisotropic piezoelectric composite laminate. Smart Mater. Struct. 1998, 7, 327. [Google Scholar] [CrossRef]
- Fuda, Y.; Yoshida, T. Piezoelectric torsional actuator. Ferroelectrics 1994, 160, 323–330. [Google Scholar] [CrossRef]
- Watanabe, J.; Someji, T.; Jomura, S. Fundamental consideration of piezoelectric multilayer actuators with interdigital-electrode-type structure. Jpn. J. Appl. Phys. 2014, 38, 3331–3333. [Google Scholar] [CrossRef]
- Park, C.H.; Baz, A. Vibration control of beams with negative capacitive shunting of interdigital electrode piezoelectrics. J. Vib. Control 2005, 11, 331–346. [Google Scholar] [CrossRef]
- Han, W.X.; Zhang, Q.; Ma, Y.T.; Pan, C.L.; Feng, Z.H. An impact rotary motor based on a fiber torsional piezoelectric actuator. Rev. Sci. Instrum. 2009, 80, 014701. [Google Scholar] [CrossRef] [PubMed]
- Pan, C.L.; Feng, Z.H.; Ma, Y.T.; Liu, Y.B. Small torsional piezoelectric fiber actuators with helical electrodes. Appl. Phys. Lett. 2008, 92, 269. [Google Scholar] [CrossRef]
- Pan, C.L.; Xiao, G.J.; Feng, Z.H.; Liao, W.H. Electromechanical characteristics of discal piezoelectric transducers with spiral interdigitated electrodes. Smart. Mater. Struct. 2014, 23, 125029. [Google Scholar] [CrossRef]
- Qi, Z.; Pan, C.L.; Ma, Y.T.; Kong, F.R.; Feng, Z.H. Piezoelectric rotary motor based on active bulk torsional element with grooved helical electrodes. IEEE/ASME Trans. Mechatron. 2012, 17, 260–268. [Google Scholar] [CrossRef]
- Hunstig, M.; Hemsel, T.; Sextro, W. Stick–slip and slip–slip operation of piezoelectric inertia drives. Part I: Ideal excitation. Sens. Actuators A Phys. 2013, 200, 90–100. [Google Scholar] [CrossRef]
- Nguyen, X.H.; Mau, T.H.; Meyer, I.; Dang, B.L.; Pham, H.P. Improvements of piezo-actuated stick–slip micro-drives: Modeling and driving waveform. Coatings 2018, 8, 62. [Google Scholar] [CrossRef]
- Pan, C.L.; Feng, Z.H.; Ma, Y.T.; Shao, W.W.; Liu, Y.B. Coupled torsional and longitudinal vibrations of piezoelectric fiber actuator with helical electrodes. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 829. [Google Scholar] [CrossRef] [PubMed]
- Han, L.L.; Zhao, Y.H.; Pan, C.L.; Yu, L.D. Design and simulation of a novel impact piezoelectric linear-rotary motor. In Proceedings of the Seventh International Symposium on Precision Mechanical Measurements, Xiamen, China, 7–12 August 2015. [Google Scholar]
- Johanastrom, K.; Canudas-De-Wit, C. Revisiting the lugre friction model. IEEE Control Syst. 2009, 28, 101–114. [Google Scholar] [CrossRef]
- Dupont, P.; Hayward, V.; Armstrong, B.; Altpeter, F. Single state elastoplastic friction models. IEEE Trans. Autom. Control 2002, 47, 787–792. [Google Scholar] [CrossRef]
- Karnopp, D. Computer simulation of stick-slip friction in mechanical dynamic systems. J. Dyn. Syst. Meas. Control 1985, 107, 100–103. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Parameters | Value | Unit |
|---|---|---|---|
| PZT-5 | Piezoelectric coefficient (d31) | −195 | pC·N−1 |
| Piezoelectric coefficient (d33) | 450 | pC∙N−1 | |
| Density (ρ) | 7600 | kg∙m−3 | |
| Poisson’s ratio | 0.29 | ||
| 304 stainless steel | Density (ρ) | 7930 | kg∙m−3 |
| Zirconia Ceramic | Density (ρ) | 5850 | kg∙m−3 |
| Parameters | Value | Unit |
|---|---|---|
| Torsional elastic stiffness (kθ) | 342.7 | N∙m |
| Torsional damper (Cθ) | 2.3 × 10−5 | N∙m∙s |
| Equivalent moment of inertia (Ip) | 2.5 × 10−9 | kg∙m2 |
| Equivalent moment of inertia (Is) | 5.3 × 10−9 | kg∙m2 |
| Maximum static friction torque (Ts) | 2.6 × 10−4 | N∙m |
| Coulomb friction torque (Tc) | 2.2 × 10−4 | N∙m |
| Stiffness (σ0) | 260 | N∙m/rad |
| Damping coefficient (σ1) | 0.1 × 10−1 | N∙m/(rad∙s−1) |
| Viscous friction parameter (B) | 0 | N∙m/(rad∙s−1) |
| Stribeck angular velocity (θ′s) | 0.2 | rad/s |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, L.; Zhao, H.; Xia, H.; Pan, C.; Jiang, Y.; Li, W.; Yu, L. A Compact Impact Rotary Motor Based on a Piezoelectric Tube Actuator with Helical Interdigitated Electrodes. Sensors 2018, 18, 2195. https://doi.org/10.3390/s18072195
Han L, Zhao H, Xia H, Pan C, Jiang Y, Li W, Yu L. A Compact Impact Rotary Motor Based on a Piezoelectric Tube Actuator with Helical Interdigitated Electrodes. Sensors. 2018; 18(7):2195. https://doi.org/10.3390/s18072195
Chicago/Turabian StyleHan, Liling, Huining Zhao, Haojie Xia, Chengliang Pan, Yizhou Jiang, Weishi Li, and Liandong Yu. 2018. "A Compact Impact Rotary Motor Based on a Piezoelectric Tube Actuator with Helical Interdigitated Electrodes" Sensors 18, no. 7: 2195. https://doi.org/10.3390/s18072195
APA StyleHan, L., Zhao, H., Xia, H., Pan, C., Jiang, Y., Li, W., & Yu, L. (2018). A Compact Impact Rotary Motor Based on a Piezoelectric Tube Actuator with Helical Interdigitated Electrodes. Sensors, 18(7), 2195. https://doi.org/10.3390/s18072195