A Coordinated Wheeled Gas Pipeline Robot Chain System Based on Visible Light Relay Communication and Illuminance Assessment

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Related Works
3. Analysis of VLRC Transmission Channel
4. Hardware Development of System
4.1. System Architecture
- Control terminal: This functional block is a micro-controller based on STM32F407VGT. It deals with the following tasks: (1) collecting analog control signals or commands and converting these signals to digital signals for robots, (2) modulating digital signals with pulse width modulation (PWM) method, (3) signal amplifying, filtering, (4) driving the light emitting diode (LED) spotlight.
- Receive terminal: This functional block is responsible for the reception and processing of sensor data. It directly handles visible light with the silicon PIN photodiode (SI-PIN PD). Then, it converts the signals into electrical signals by using a PIN PD. After signal amplifying, filtering, and demodulating, the sensor data from the leader robot are restored.
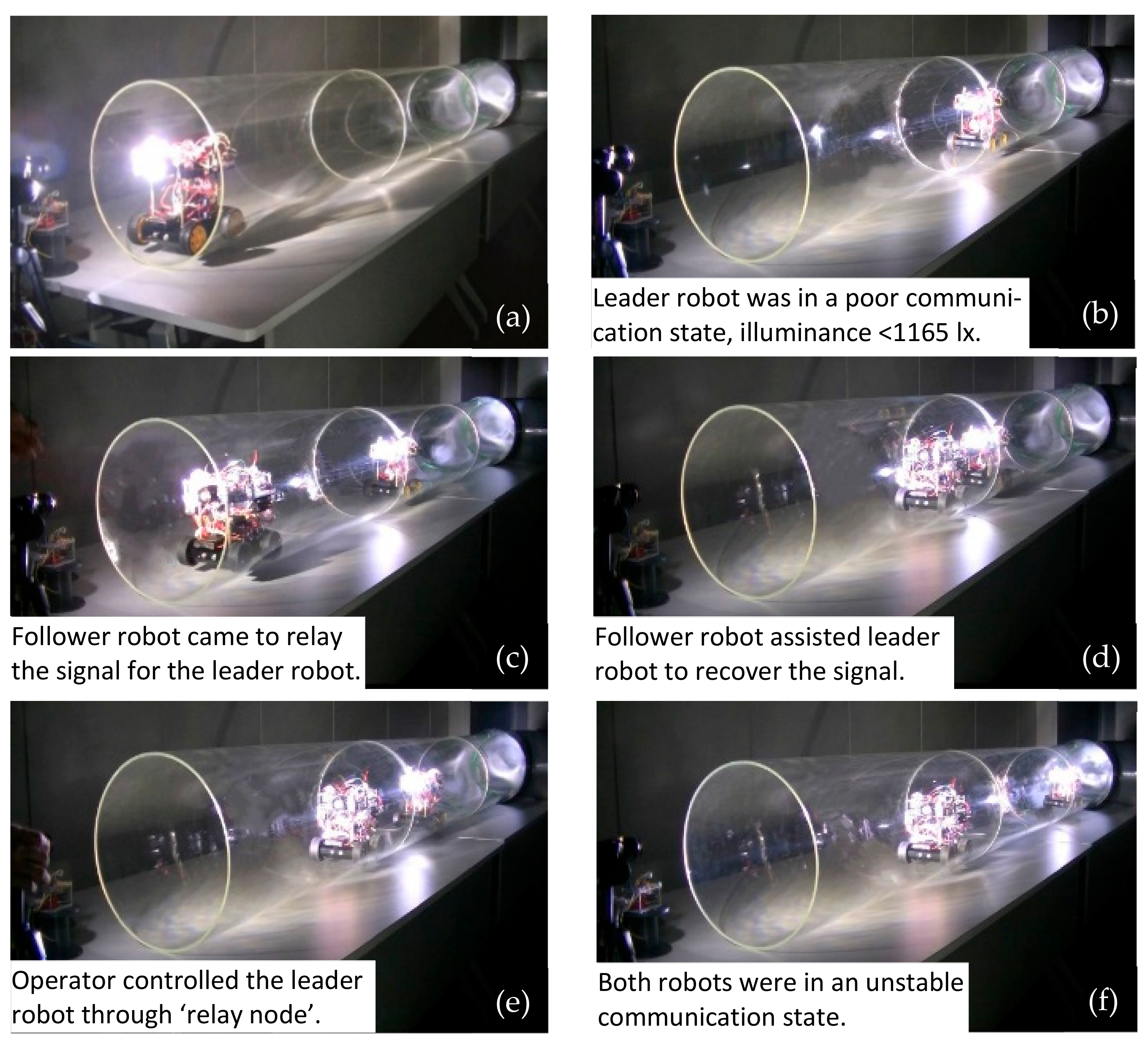
- Leader robot: This robot plays the most important role in the whole system. It is capable of completing gas pipe inspection tasks with gas detection sensors. The robot contains three parts: (1) The gas detection and transmission module: The robot can collect the information inside the pipe with barometric gas pressure/temperature sensor BMP280 and gas concentration sensor CCS811. The signals are processed and transmitted through the ‘relay node’ in the form of visible light. (2) The visible light intensity indication assessment module: The robot can realize the coordinated movement and reliable VLRC with the support of this module. The detail functions will be explained in Section 4.3. (3) The visible light receiver, motor drive, and robot controller modules: The robot can be controlled by the relay visible light signal from the control terminal.
- Follower robot: As a relay node, it can receive different kinds of data and retransmit to the corresponding object (leader or receiving terminal). It adopts a special VLC application protocol to prevent information conflict and mutual interference. This mechanism will be described in Section 5.2. The follower robot can achieve self-navigation in the pipe with three ultrasonic sensors.
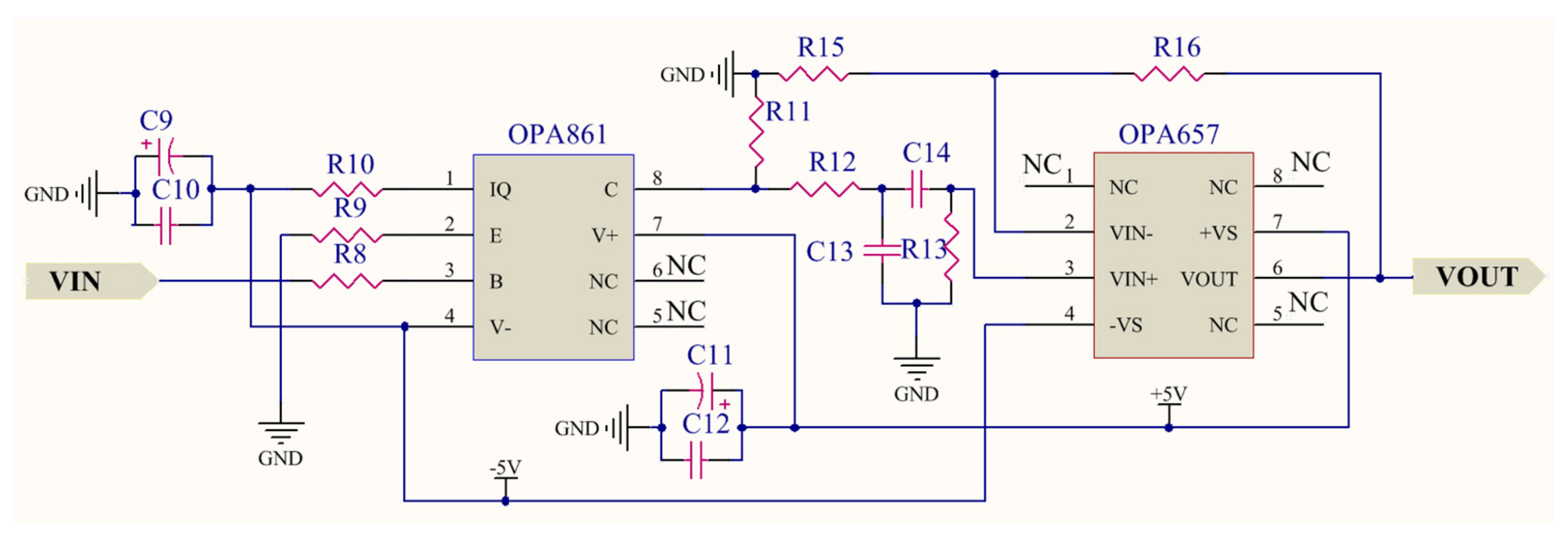
4.2. VLC Transmitter Design
4.3. VLC Receiver and Illuminance Assessment Module
5. Software Development of System
5.1. Modulation and Demodulation
5.2. VLRC Mechanism
5.2.1. Message Identifier Structure and Frame Format
5.2.2. Software Realization of Relay Process
6. System Performance Evaluation
6.1. Waveform Test of System
6.2. Communication Quality Test of System
6.3. Experiment on Relationship between Illuminance Assessment and Communication Region
6.4. Movement and Illuminance Assessment Test in the Transparent Straight Pipe
6.5. Movement and Illuminance Assessment Test in the Straight Pipe with Steel Cover
7. Conclusions and Future Work
- In order to extend the inspection range with more effective and high-quality communication method, some VLC characteristics in the pipe should be studied further. These studies may contain: signal to noise ratio analysis, research on diffuse path gain of light in different pipelines, experiment on the effect of inter-symbol interference, study on diffuse reflection and scattering features of light transmission in gas medium, test on the influence of visible light components of different frequencies and wavelengths on light communication.
- The selection of PWM method in this research has not been appropriately justified. There is still a lack of numerical analysis to verify the transmission performance improvement based on such a method. Actually, the DER indicates that the PWM is a poor choice at low lux level. The redesign of the modulation/demodulation module and the relay module will be a better solution. From Figure 12a,b, the results demonstrate that if the transmission rate is beyond 10 kbps, big DER will occur. In addition, we have done the communication experiment at a transmission rate of 15 kbit/s for both methods. The results depict that the communication cannot be realized by both the PWM and OOK methods. Through the short distance test, we discovered that the demodulation system based on embedded STM32 we developed has limitation to capture and recognize the digital pulse accurately if the rate is beyond 10 kbit/s. Besides, a new MCU such as FPGA for modulation and demodulation should also be considered. Like the prototype, although this transmission rate is enough for robot controlling, it is not enough for video transmission for pipe inspection. The selection of other advanced modulation techniques should be considered and performance comparison at a high data rate and low lux level should also be implemented.
- This system can increase the risk of the system’s control and communication complexity. In order to make the system more robust and stable, a new control and communication algorithm should be further investigated.
- Such a system still has difficulties to adapt to a more complex pipe environment such as the elbow, T-junction, etc. The solution can be described as: (1) optimizing the mechanical structure of the robot, (2) improving communication ability in these complicated regions by analyzing and improving the property of light diffusion in elbow or T-junction.
Author Contributions
Acknowledgements
Conflicts of Interest
Abbreviations
| DTS | Distributed Temperature Sensing |
| WRC | Wireless Relay Communication |
| VLC | Visible Light Communication |
| VLRC | Visible Light Relay Communication |
| MIMO | Multiple Input Multiple Output |
| ADC | Analog-to-Digital Converter |
| MCU | Micro Controller Unit |
| OOK | On Off Key |
| BPSK | Binary Phase Shift Keying |
| PPM | Pulse Position Modulation |
| OFDM | Orthogonal Frequency Division Multiplexing |
| PWM | Pulse Width Modulation |
| RCS | Robot Chain System |
| DER | Data Error Ratio |
| DLR | Data Loss Ratio |
| RSSI | Received Signal Strength Indication |
| LED | Light Emitting Diode |
| WSN | Wireless Sensor Network |
| LOS | Line Of Sight |
| NLOS | Non Line Of Sight |
| WALCP | Wireless Application Layer Communication Protocol |
| RN | Relay Node |
| SN | Sensor Node |
References
- Sun, X.G.; Li, J.; Burgess, D.T.; Hines, M.; Zhu, B.Y. A multicore optical fiber for distributed sensing. In Proceedings of the SPIE 9098, Fiber Optic Sensors and Applications XI, 90980W, Baltimore, MD, USA, 18 June 2014. [Google Scholar] [CrossRef]
- Roh, S.; Kim, D.W.; Lee, J.S.; Moon, H.; Choi, H.R. Modularized in-pipe robot capable of selective navigation inside of pipelines. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nice, France, 22–26 September 2008; pp. 1724–1729. [Google Scholar]
- Lee, D.H.; Moon, H.; Choi, H.R. Autonomous navigation of in-pipe working robot in unknown pipeline environment. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2018; pp. 1559–1564. [Google Scholar]
- Kim, H.M.; Suh, J.S.; Choi, Y.S.; Trong, T.D.; Moon, H.; Koo, J.; Ryew, S.; Choi, H.R. An in-pipe robot with multi-axial differential gear mechanism. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 252–257. [Google Scholar]
- Schempf, H.; Mutschler, E.; Gavaert, A.; Skoptsov, G.; Crowley, W. Visual and nondestructive evaluation inspection of live gas mains using the Explorer TM family of pipe robots. J. Field Robot. 2010, 12, 1–33. [Google Scholar]
- Ahrary, A.; Kawamura, Y.; Ishikawa, M. A laser scanner for landmark detection with the sewer inspection robot KANTARO. In Proceedings of the IEEE/SMC International Conference on System of Systems Engineering (ICSSE), Los Angeles, CA, USA, 2–6 April 2006; pp. 310–315. [Google Scholar]
- Nassiraei, A.A.F.; Kawamura, Y.; Ahrary, A.; Mikuriya, Y.; Ishii, K. Concept and design of a fully autonomous sewer pipe inspection mobile robot “KANTARO”. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Roma, Italy, 10–14 April 2007; pp. 136–143. [Google Scholar]
- Ahrary, A.; Ishikawa, M.; Okada, M. Experimental evaluation of intelligent fault detection system for inspection of sewer pipes. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Diego, CA, USA, 29 October–2 November 2007; pp. 1248–1253. [Google Scholar]
- Wu, D.; Chatzigeorgiou, D.; Toumi, Y.K.; Mansour, R.B. Node localization in robotic sensor networks for pipeline inspection. Trans. Ind. Inform. 2016, 12, 809–819. [Google Scholar] [CrossRef]
- Zhao, W.; Kamezaki, M.; Yoshida, K.; Konno, M.; Onuki, A.; Sugano, S. An automatic tracked robot chain system for gas pipeline inspection and maintenance based on wireless relay communication. In Proceedings of the IEEE/RSJ International Conference in Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 6551–6556. [Google Scholar]
- Zhao, W.; Kamezaki, M.; Yoshida, K.; Konno, M.; Toriumi, R.; Sugano, S. A reliable communication and localization method for gas pipeline robot chain based on RSSI theory. In Proceedings of the IEEE/SICE International Symposium on System Integration (SII), Taipei, Taiwan, 11–14 December 2017; pp. 282–287. [Google Scholar]
- Little, T.D.C.; Dib, P.; Shah, K.; Barraford, N.; Gallagher, B. Using LED lighting for ubiquitous indoor wireless networking. In Proceedings of the IEEE International Conference on Wireless and Mobile Computing, Networking and Communications, Avignon, France, 12–14 October 2008; pp. 373–378. [Google Scholar]
- Zeng, L.B.; O’Brien, D.C.; Minh, H.L.; Faulkner, G.E.; Lee, K. High data rate multiple input multiple output (MIMO) optical wireless communications using white led lighting. J. Sel. Areas Commun. 2009, 27, 1154–1662. [Google Scholar]
- Azhar, A.H.; Tran, T.A.; O’Brien, D. A gigabit/s indoor wireless transmission using MIMO-OFDM visible-light communications. J. Photonics Technol. Lett. 2013, 25, 171–174. [Google Scholar] [CrossRef]
- Pham, Q.N.; Rachim, V.P.; An, J.Y.; Chung, W.Y. Ambient light rejection using a novel average voltage tracking in visible light communication system. Appl. Sci. 2017, 7, 670. [Google Scholar] [CrossRef]
- Ciro, R.A.M.; Giraldo, F.E.L.; Perez, A.F.B.; Rivera, M.L. Characterization of light-to-frequency converter for visible light communication systems. Electronics 2018, 7, 165. [Google Scholar] [CrossRef]
- Uddin, M.S.; Cha, J.S.; Kim, J.Y.; Jang, Y.M. Mitigation technique for receiver performance variation of multi-color channels in visible light communication. Sensors 2011, 11, 6131–6144. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.F.; Zhao, J.Q.; Shi, J.Y.; Chi, N. Reversed three-dimensional visible light indoor positioning utilizing annular receivers with multi-photodiodes. Sensors 2016, 16, 1254. [Google Scholar] [CrossRef]
- Bosch, C.L.; Gonzalez, I.A.; Rodriguez, D.S.; Casanas, C.R. Evaluation of the effects of hidden node problems in IEEE 802.15.7 uplink performance. Sensors 2016, 16, 216. [Google Scholar] [CrossRef] [PubMed]
- Pesek, P.; Zvanovec, S.; Chvojka, P.; Bhatnagar, M.R.; Ghassemlooy, Z.; Saxena, P. Mobile user connectivity in relay-assisted visible light communications. Sensors 2018, 18, 1125. [Google Scholar] [CrossRef]
- Tao, S.; Yu, H.; Li, Q.; Bai, X.; Tang, Y. Power allocation of non-orthogonal multiple access based on dynamic user priority for indoor OOS-guaranteed visible light communication networks. Appl. Sci. 2018, 8, 1219. [Google Scholar] [CrossRef]
- Colado, C.V.; Arredondo, B.; Torres, J.C.; Fraguas, E.L.; Vergaz, R.; Martin, D.M.; Pozo, G.; Romero, B.; Apilo, P.; Quintana, X.; et al. An all-organic flexible visible light communication system. Sensors 2018, 18, 3045. [Google Scholar] [CrossRef]
- Carrascal, C.; Demirkol, I.; Paradells, J. On-demand sensor node wake-up using solar panels and visible light communication. Sensors 2016, 16, 418. [Google Scholar] [CrossRef]
- Rodríguez, J.; Lamar, D.G.; Aller, D.G.; Miaja, P.F.; Sebastian, J. Efficient visible light communication transmitters based on switching-mode dc-dc converters. Sensors 2018, 18, 1127. [Google Scholar] [CrossRef]
- TI OPA861, Wide Bandwidth Operational Transconductance Amplifier (OTA), datasheet (Rev. G), SBOS338G–August 2005–rev. May 2013; Texas Instruments Incorporated: Dallas, TX, USA, 2013.
- Munoz, P.; Mico, G.; Bru, L.A.; Pastor, D.; Perez, D.; Domenech, J.D.; Fernandez, J.; Banos, R.; Gargallo, B.; Alemany, R.; et al. Silicon nitride photonic integration platforms for visible, near-infrared and mid-infrared applications. Sensors 2017, 17, 2088. [Google Scholar] [CrossRef]
- TI OPA657, 1.6-GHz, Low-Noise, FET-Input Operational Amplifier, datasheet (Rev. F), SBOS197F–December 2001–rev. August 2015; Texas Instruments Incorporated: Dallas, TX, USA, 2015.
- Pai, K.J.; Qin, L.D.; Lin, C.H.; Tang, S.Y. Start-up current spike mitigation of high-power laser Diode driving controller for vehicle headlamp applications. Appl. Sci. 2018, 8, 1532. [Google Scholar] [CrossRef]
- Fuada, S.; Putra, A.P.; Aska, Y.; Adiono, T. Trans-impedance amplifier (TIA) design for visible light communication (VLC) using commercially available OP-AMP. In Proceedings of the Information Technology, Computer, and Electrical Engineering (ICTTACEE), Semarang, Indonesia, 19–21 October 2016; pp. 31–36. [Google Scholar]
- Cree XLamp XHP70.2 LEDs, Product Family Data Sheet, CLD-DS170 Rev 0F; Cree, Inc.: Durham, NC, USA, 2017–2018.
- Si Photodiodes, S12915 Series, For Visible to IR, General-Purpose Photometry, Datasheet, Cat. No. KSPD1086E02 September 2018, Hamamatsu Photonics K.K.: Welwyn Garden City, UK, 2018.
- BH1750FVI, Digital 16bit Serial Output Type Ambient Light Sensor IC, Technical Note No. 11046EDT01, 2011.11—Rev. D; ROHM Co. Ltd.: Kyoto, Japan, 2011.
- Zhang, D.F.; Zhu, Y.J.; Zhang, Y.Y. Multi-LED phase-shifted OOK modulation based visible light communication systems. IEEE Lett. Photonics Technol. 2013, 25, 2251–2254. [Google Scholar] [CrossRef]
- Shinwasusin, E.; Chalie, C.; Suksompong, P. Modulation performance for visible light communications. In Proceedings of the IEEE International Conference Information & Communications Technology for Embedded Systems, Hua-Hin, Thailand, 22–24 March 2015; pp. 277–283. [Google Scholar]
- Afgani, M.Z.; Haas, H.; Elgala, H.; Knipp, D. Visible light communication using OFDM. In Proceedings of the IEEE International Conference on Testbeds & Research Infrastructures for the Development of Networks & Communities, Barcelona, Spain, 1–3 March 2006; pp. 129–134. [Google Scholar]
- Gancarz, J.E.; Elgala, H.; Little, T.D.C. Overlapping PPM for band-limited visible light communication and dimming. IEEE Trans. Solid State Lighting 2015, 12, 203. [Google Scholar] [CrossRef]
- Zhan, P.; Yu, K.; Swindlehurst, A.L. Wireless relay communications with unmanned aerial vehicles: Performance and optimization. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2068–2085. [Google Scholar] [CrossRef]
- Cetin, O.; Zagli, I.; Yilmaz, G. Establishing obstacle and collision free communication relay for UAVs with artificial potential fields. J. Intell. Robot. Syst. 2013, 69, 361–372. [Google Scholar] [CrossRef]
- Wang, J.; Al-Kinani, A.; Zhang, W.S.; Wang, C.X.; Zhou, L. A general channel model for visible light communications in underground mines. J. Commun. Theor. Syst. 2018, 12, 95–105. [Google Scholar] [CrossRef]
- Ding, J.; Xu, Z. Performance of indoor VLC and illumination under multiple reflections. In Proceedings of the IEEE International Conference on Wireless Communications and Signal Processing (WCSP), Hefei, China, 23–25 October 2014; pp. 1–6. [Google Scholar]
- Mmbaga, P.F.; Thompson, J.; Haas, H. Performance analysis of indoor diffuse VLC MIMO channels using angular diversity detectors. J. Lightwave Technol. 2016, 34, 1254–1266. [Google Scholar] [CrossRef]
- Singh, D.; Sood, A.; Thakur, G.; Arora, N.; Kumar, A. Design and implementation of wireless communication system for toll collection using LIFI. In Proceedings of the IEEE International Conference on Signal Processing, Computing and Control (ISPCC), Solan, India, 21–23 September 2017; pp. 510–515. [Google Scholar]
- Niaz, M.T.; Imdad, F.; Kim, H.S. Power consumption efficiency evaluation of multi-user full-duplex visible light communication systems for smart home technologies. Energies 2017, 10, 254. [Google Scholar] [CrossRef]
- Garcia, G.C.; Ruiz, I.L.; Nieto, M.A.G. State of the art, trends and future of Bluetooth low energy, near field communication and visible light communication in the development of smart cities. Sensors 2016, 16, 1968. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Feng, L.; Yang, A. Fusion based on visible light positioning and inertial navigation using extended kalman filters. Sensors 2017, 17, 1093. [Google Scholar]
- Masini, B.M.; Zanella, A. A survey on the roadmap to mandate on board connectivity and enable V2V-based vehicular sensor networks. Sensors 2018, 18, 2207. [Google Scholar] [CrossRef]
- Masini, B.M.; Bazzi, A.; Zanella, A. Vehicular visible light networks for urban mobile crowd sensing. Sensors 2018, 18, 1177. [Google Scholar] [CrossRef]
- Ji, R.; Wang, S.; Liu, Q.; Lu, W. High-speed visible light communications: Enabling technologies and state of the art. Appl. Sci. 2018, 8, 589. [Google Scholar] [CrossRef]
- Arredondo, B.; Romero, B.; Pena, J.M.S.; Pacheco, A.F.; Alonso, E.; Vergaz, R.; Dios, C.D. Visible light communication system using an organic bulk heterojunction photodetector. Sensors 2013, 13, 12266–12276. [Google Scholar] [CrossRef]
- Huynh, P.; Yoo, M. VLC-based positioning system for an indoor environment using an image sensor and an accelerometer sensor. Sensors 2016, 16, 783. [Google Scholar] [CrossRef]
- Do, T.H.; Yoo, M. An in-depth survey of visible light communication based positioning systems. Sensors 2016, 16, 678. [Google Scholar] [CrossRef] [PubMed]

















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, W.; Kamezaki, M.; Yoshida, K.; Yamaguchi, K.; Konno, M.; Onuki, A.; Sugano, S. A Coordinated Wheeled Gas Pipeline Robot Chain System Based on Visible Light Relay Communication and Illuminance Assessment. Sensors 2019, 19, 2322. https://doi.org/10.3390/s19102322
Zhao W, Kamezaki M, Yoshida K, Yamaguchi K, Konno M, Onuki A, Sugano S. A Coordinated Wheeled Gas Pipeline Robot Chain System Based on Visible Light Relay Communication and Illuminance Assessment. Sensors. 2019; 19(10):2322. https://doi.org/10.3390/s19102322
Chicago/Turabian StyleZhao, Wen, Mitsuhiro Kamezaki, Kento Yoshida, Kaoru Yamaguchi, Minoru Konno, Akihiko Onuki, and Shigeki Sugano. 2019. "A Coordinated Wheeled Gas Pipeline Robot Chain System Based on Visible Light Relay Communication and Illuminance Assessment" Sensors 19, no. 10: 2322. https://doi.org/10.3390/s19102322
APA StyleZhao, W., Kamezaki, M., Yoshida, K., Yamaguchi, K., Konno, M., Onuki, A., & Sugano, S. (2019). A Coordinated Wheeled Gas Pipeline Robot Chain System Based on Visible Light Relay Communication and Illuminance Assessment. Sensors, 19(10), 2322. https://doi.org/10.3390/s19102322