Classification of Human Motions Using Micro-Doppler Radar in the Environments with Micro-Motion Interference


Abstract
:1. Introduction
- This paper proposes a target human motion classification system that can work in the scenarios with non-target micro-motion interference. Under the non-target micro-motion interference caused by a non-target human body, the proposed system can accurately classify four different motion states, including walking without any arm swinging, walking with one arm swinging, walking with both arms swinging, and running.
- This paper designs a time-frequency analysis scheme, which can (1) filter out non-target micro-motion interference, (2) improve the time-frequency resolution of the collected signal, and (3) suppress the negative influence of cross-terms and background noise.
- This paper proposes a new method of Energy Aggregation based on the classical S-method. By using S-transform instead of STFT, and increasing the weight of time-frequency point energy spectral density, we greatly improve the time-frequency resolution and mitigate the effect caused by background noise, while maintaining the ability of the S-method in terms of cross-terms suppression and time-frequency aggregation enhancement.
- This paper uses the software defined radio equipment Universal Software Radio Peripheral (USRP) N210 and GNU Radio software tool-kits [26] to construct the continuous wave radar system. Our experiments show the high performance of the proposed system in terms of its interference resistance and classification accuracy under various experimental scenarios.
2. System
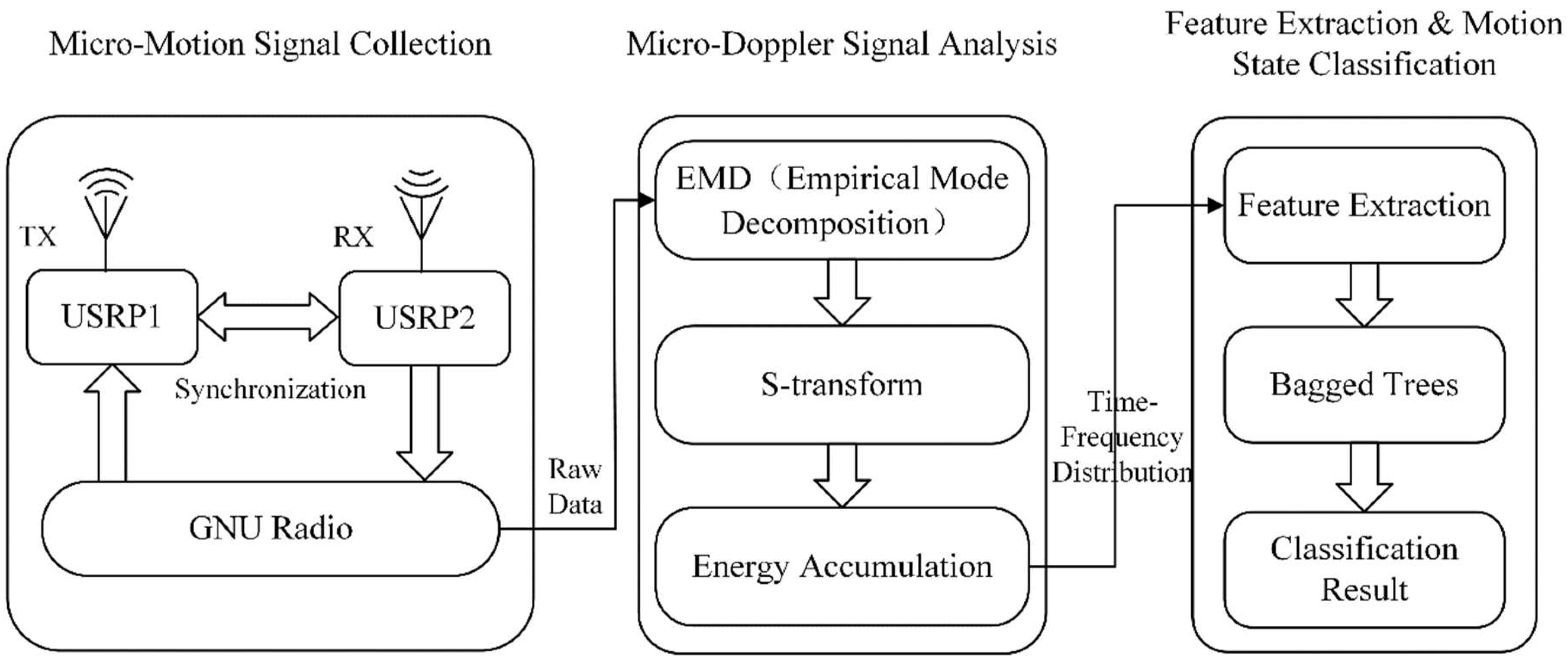
2.1. System Overview
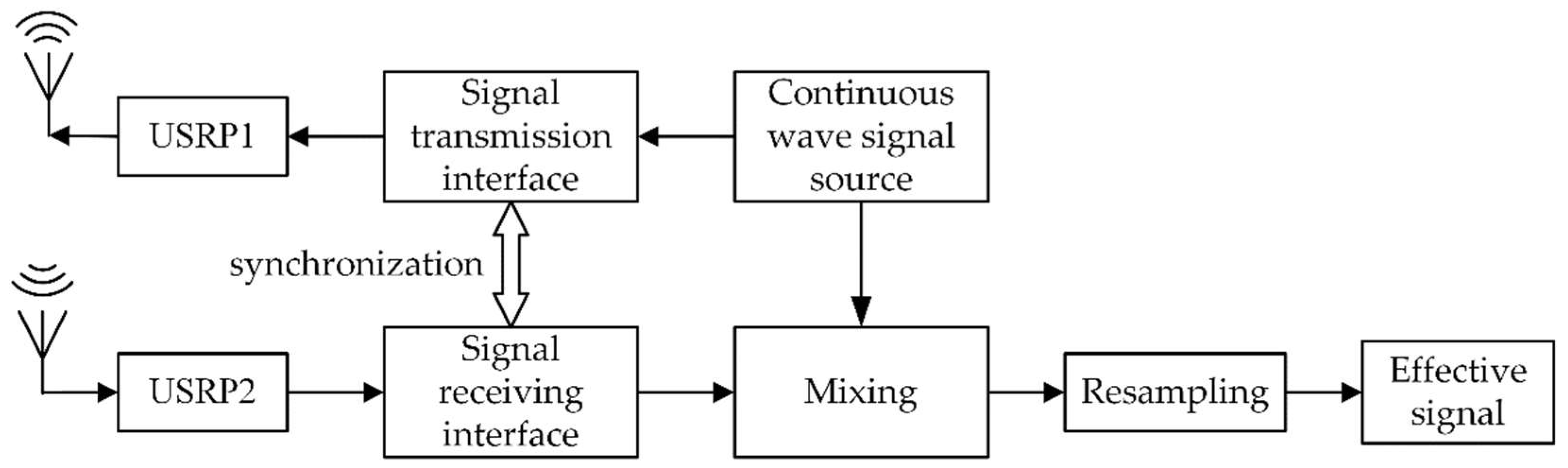
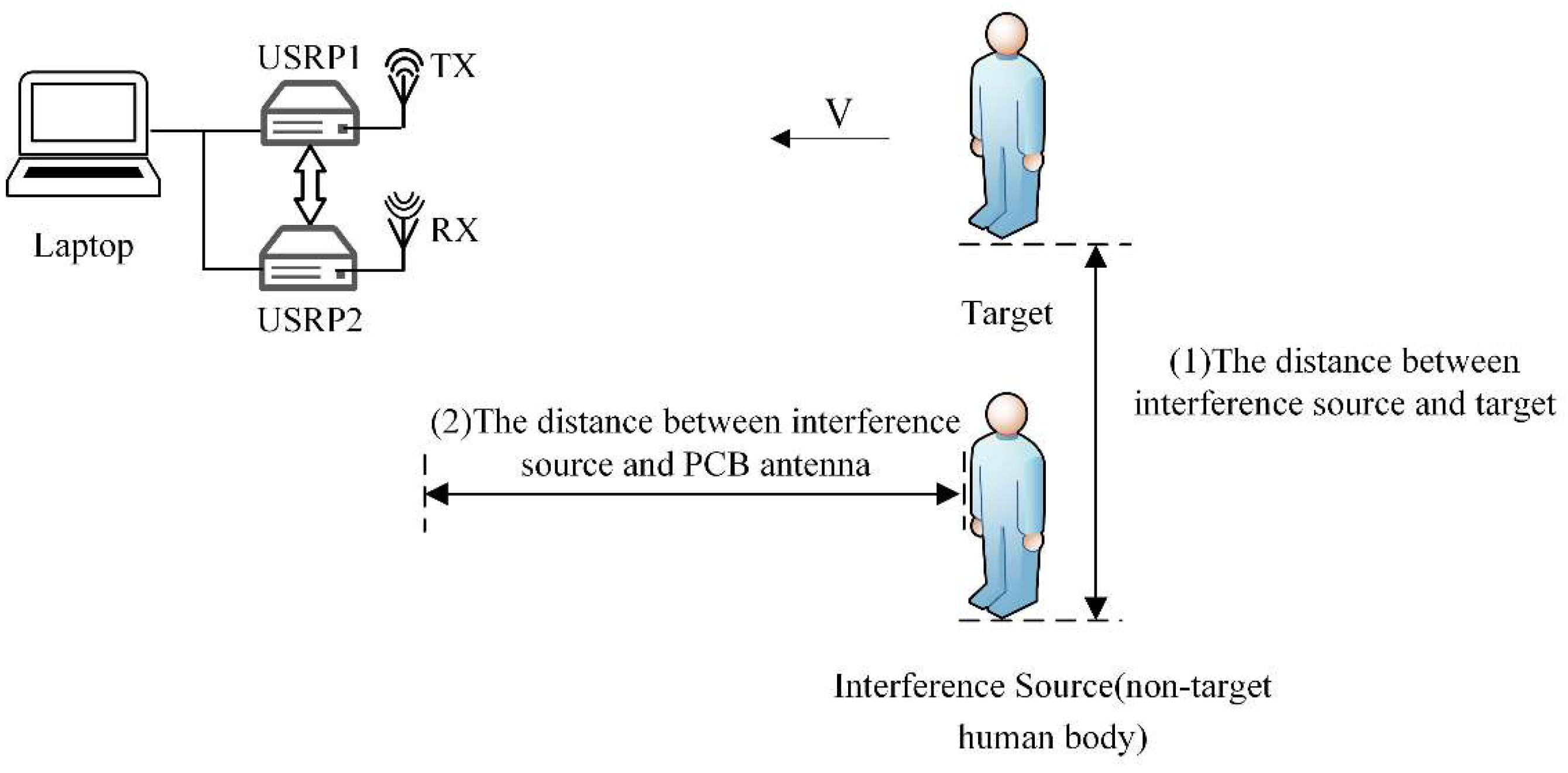
- Micro-Motion Signal Collection: The micro-motion signals are collected by continuous wave radar transceivers. Such signals are radar echoes and they are represented by discrete complex signals. The transceivers are built on a test-bed using USRP N210 and GNU Radio. USRP N210 is a software-defined-radio equipment, and GNU Radio is an open-source software-defined-radio tool-kit.
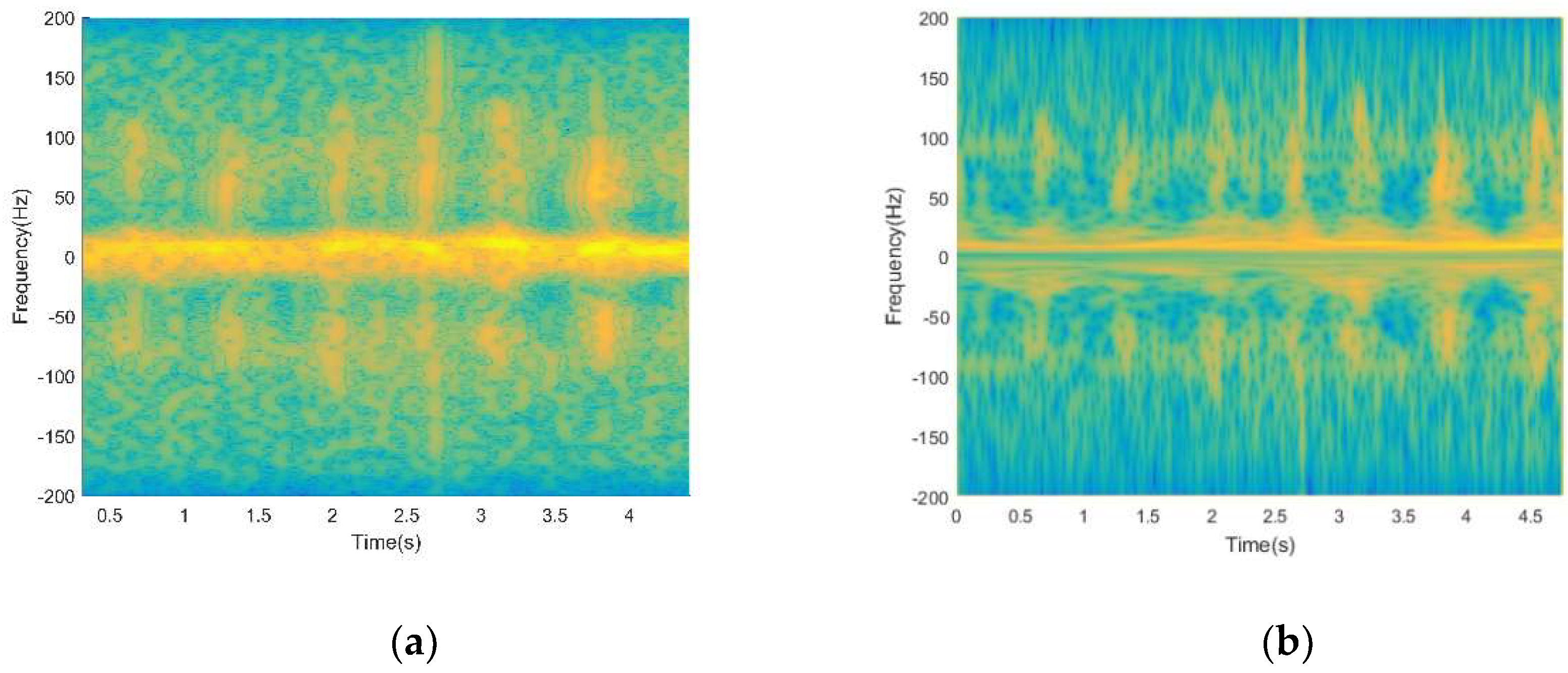
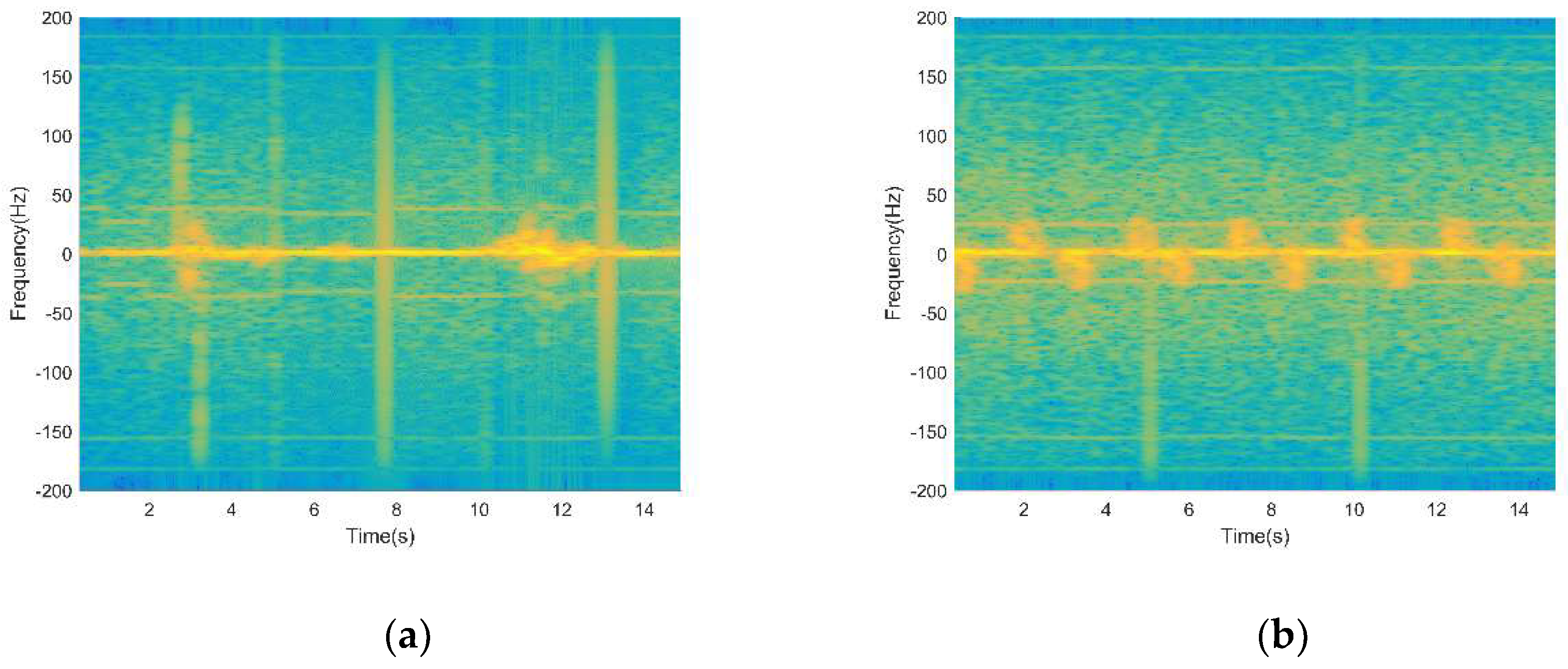
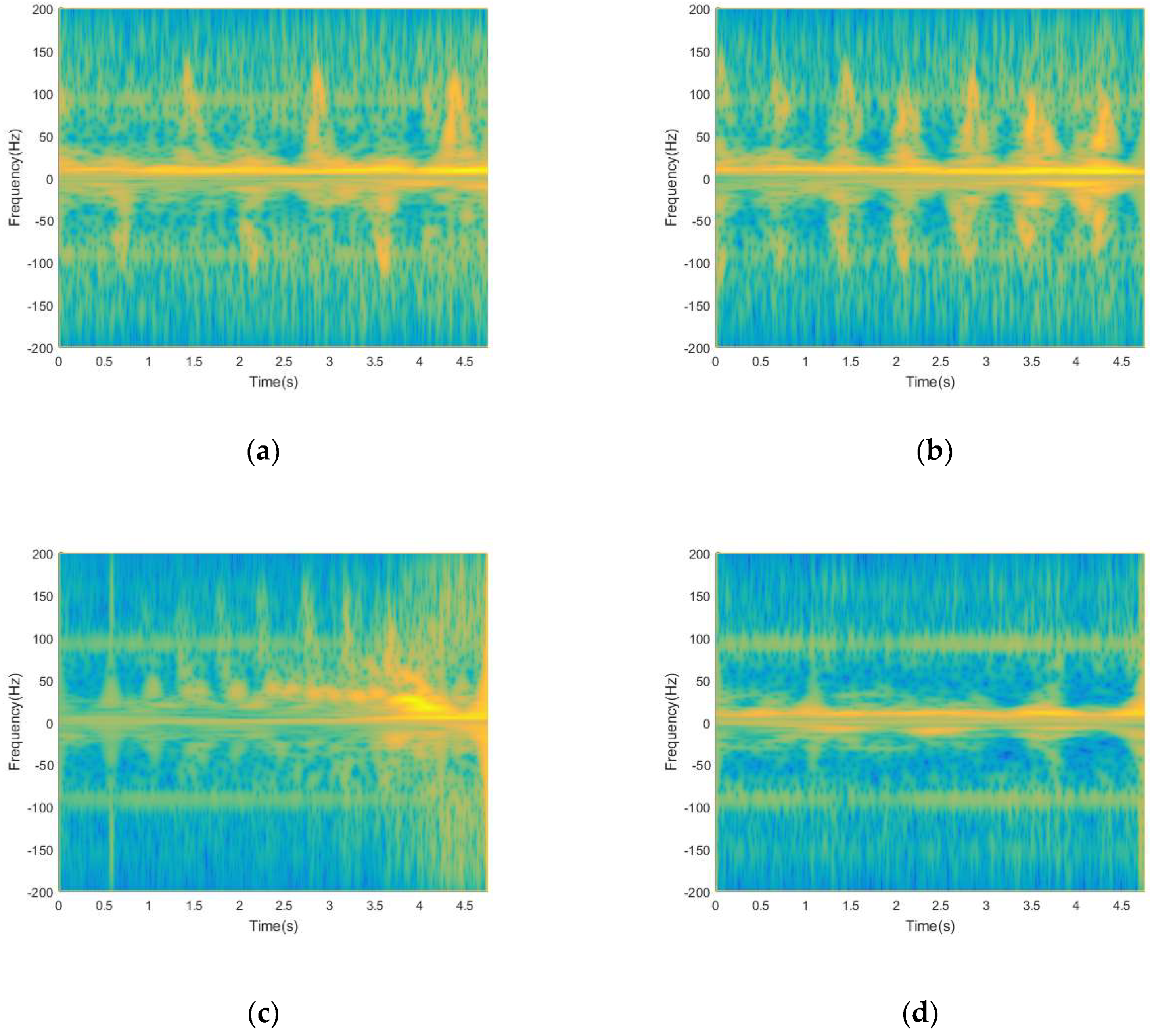
- Micro-Doppler Signal Analysis: We use the micro-Doppler signal analysis module performing time-frequency processing on the raw data, so as to (1) filter out the micro-motion interference generated by the non-target human body, and then (2) improve the time-frequency resolution, (3) suppress the cross-terms and mitigate the effect caused by background noise. In this way, the influence of non-target micro-motion interference on the target human motion can be reduced significantly. Firstly, we use the EMD algorithm to decompose the raw signal into multiple time-frequency components and then select the appropriate components for signal reconstruction, which can filter out the interference. Then, we use S-transform to perform time-frequency analysis on the reconstructed signal. The frequency resolution of the S-transform can be automatically adjusted as the frequency changes, so it can increase the time-frequency resolution of the reconstructed signal. Finally, we use Energy Aggregation to process the signal after the S-transform to suppress cross-terms and mitigate the effect caused by background noise. The signal processed by the above methods of time-frequency analysis reduces the influence of non-target micro-motion interference and generates a high-resolution time-frequency distribution that reflects the real body motion of the target human.
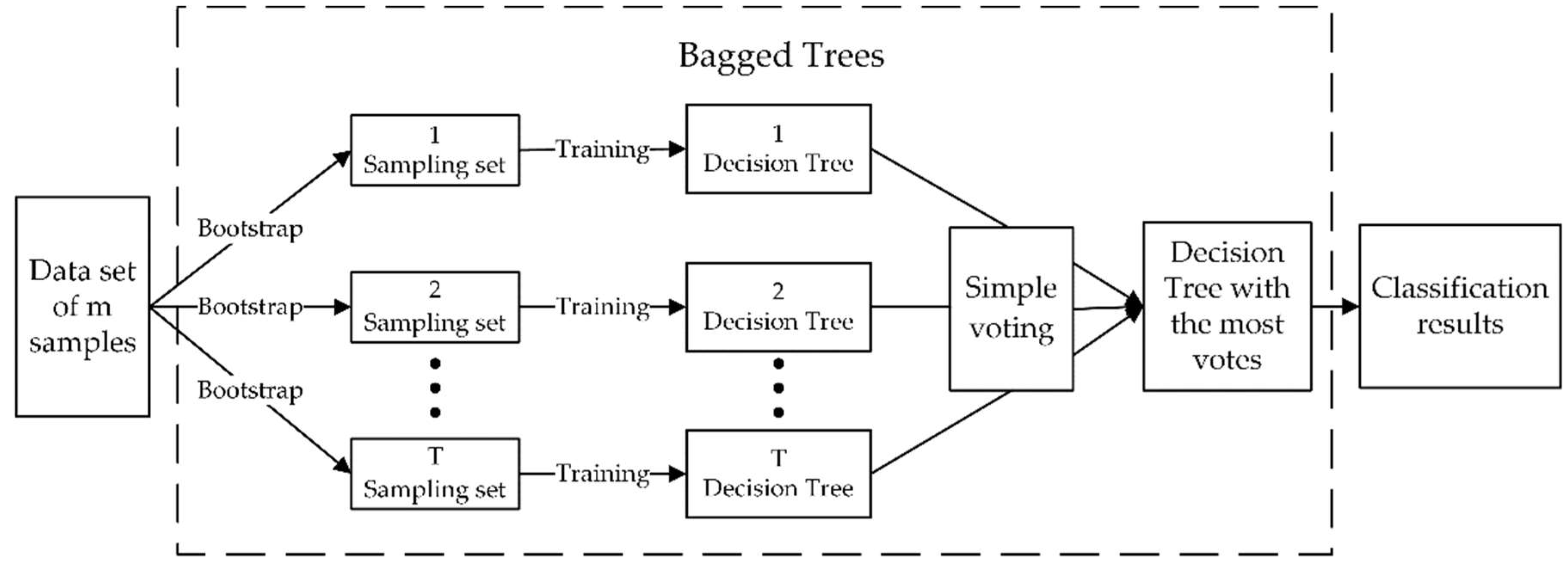
- Feature Extraction and Motion State Classification: We extract a set of features, i.e., Doppler bandwidth, Micro-Doppler bandwidth and Effective arm-swing time difference, from the time-frequency distribution obtained in the Micro-Doppler Signal Analysis part. Further, we adopt ensemble learning by combining bagging and the decision tree, and accurately classify the four motion states, including walking without any arm swinging, walking with one arm swinging, walking with both arms swinging, and running, under the scenarios with non-target micro-motion interference.
2.2. Micro-Motion Signal Collection
2.3. Micro-Doppler Signal Analysis
2.3.1. Empirical Mode Decomposition
2.3.2. S-transform
2.3.3. Energy Aggregation based on S-method
2.4. Feature Extraction and Motion State Classification
2.4.1. Feature Extraction
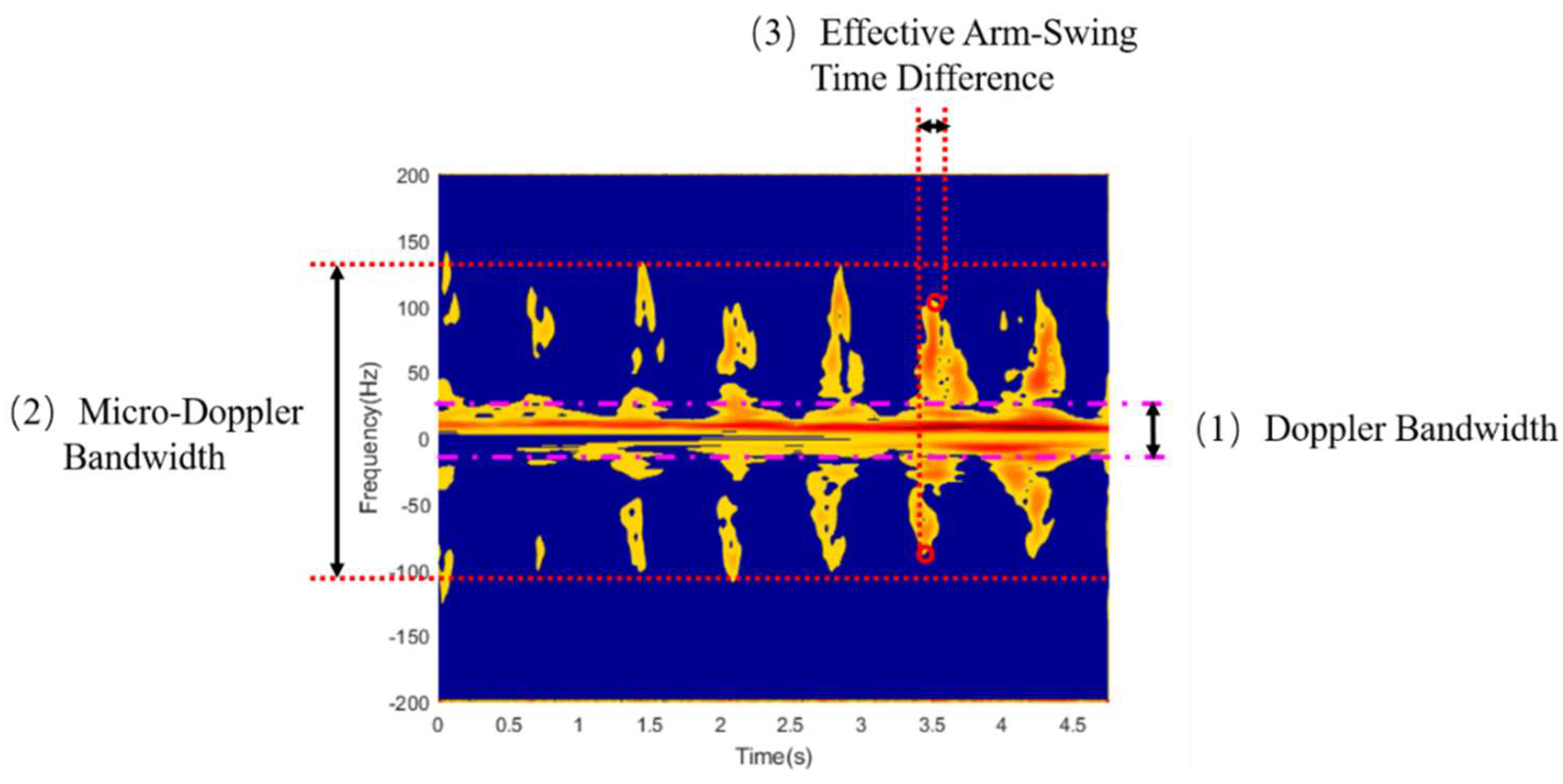
- Doppler Bandwidth: This reflects the change of trunk velocity during the movement of the human body. When the value of Doppler bandwidth is small, the movement velocity of the trunk is slow. When it is large, the movement velocity of the trunk is faster.
- Micro-Doppler Bandwidth: The total bandwidth of the effective signal is used as the micro-Doppler bandwidth, which reflects the situation of the swinging arm. When the value is small, it means that there is no arm swing. When the value is large, the arm swings.
- Effective Arm-Swing Time Difference: This reflects the time difference between the forward swinging arm and the backward swinging arm, and the number of swinging arms can be decided based on this. A larger value represents an arm-swing, and a smaller value represents two arm-swings.
2.4.2. Motion State Classification
3. Experimental Evaluation
3.1. Experimental Testbed
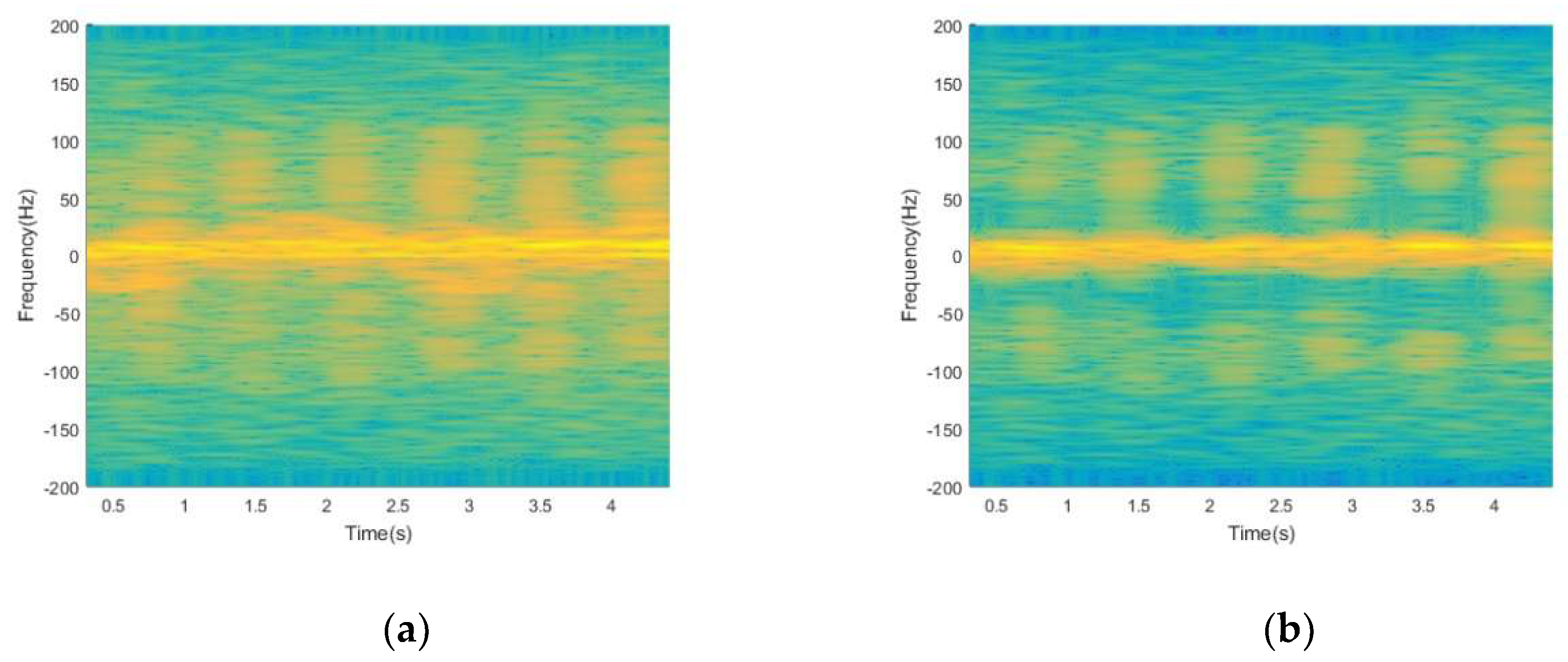
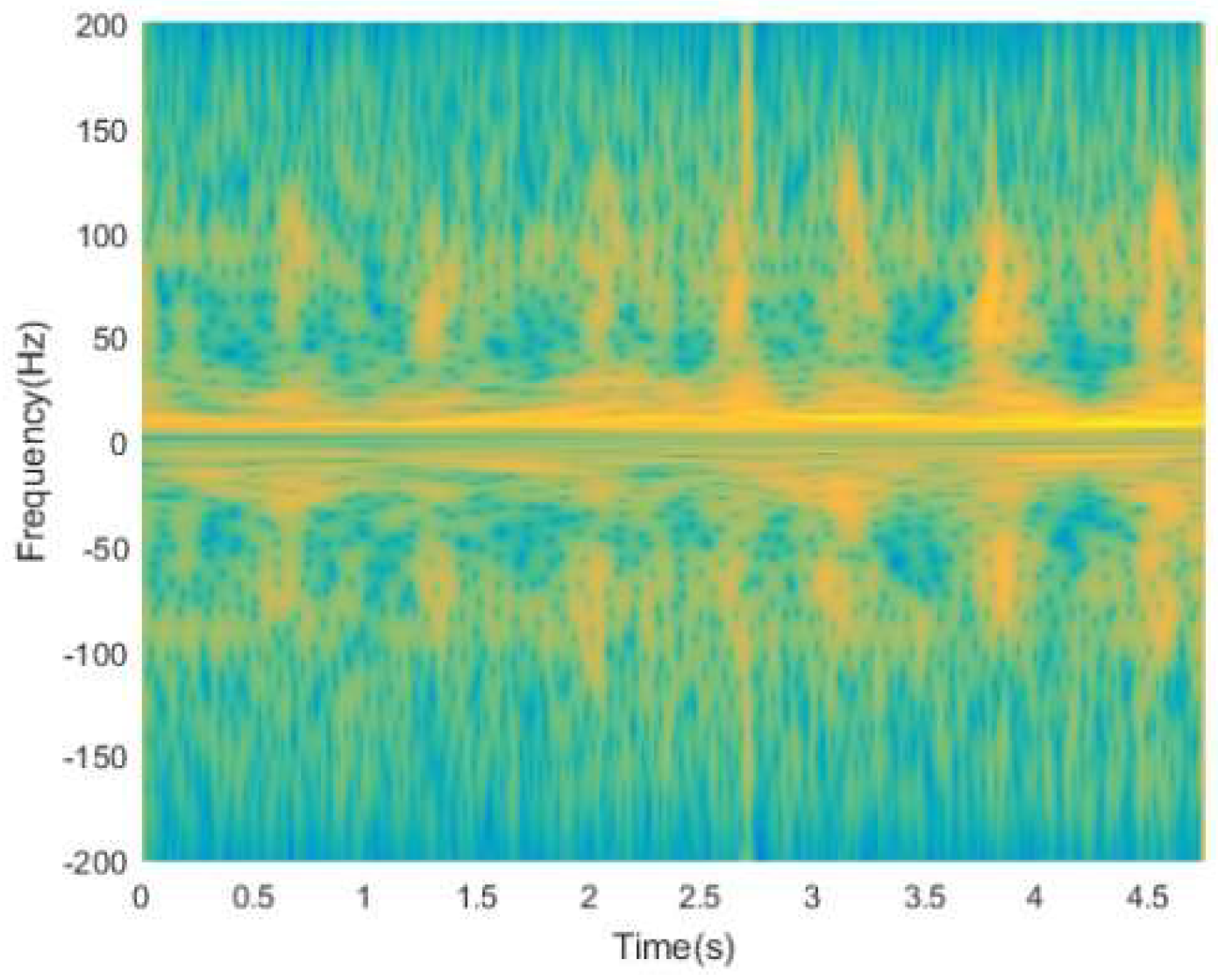
3.2. Results
3.3. Discussion
3.3.1. Comparison with Other Systems
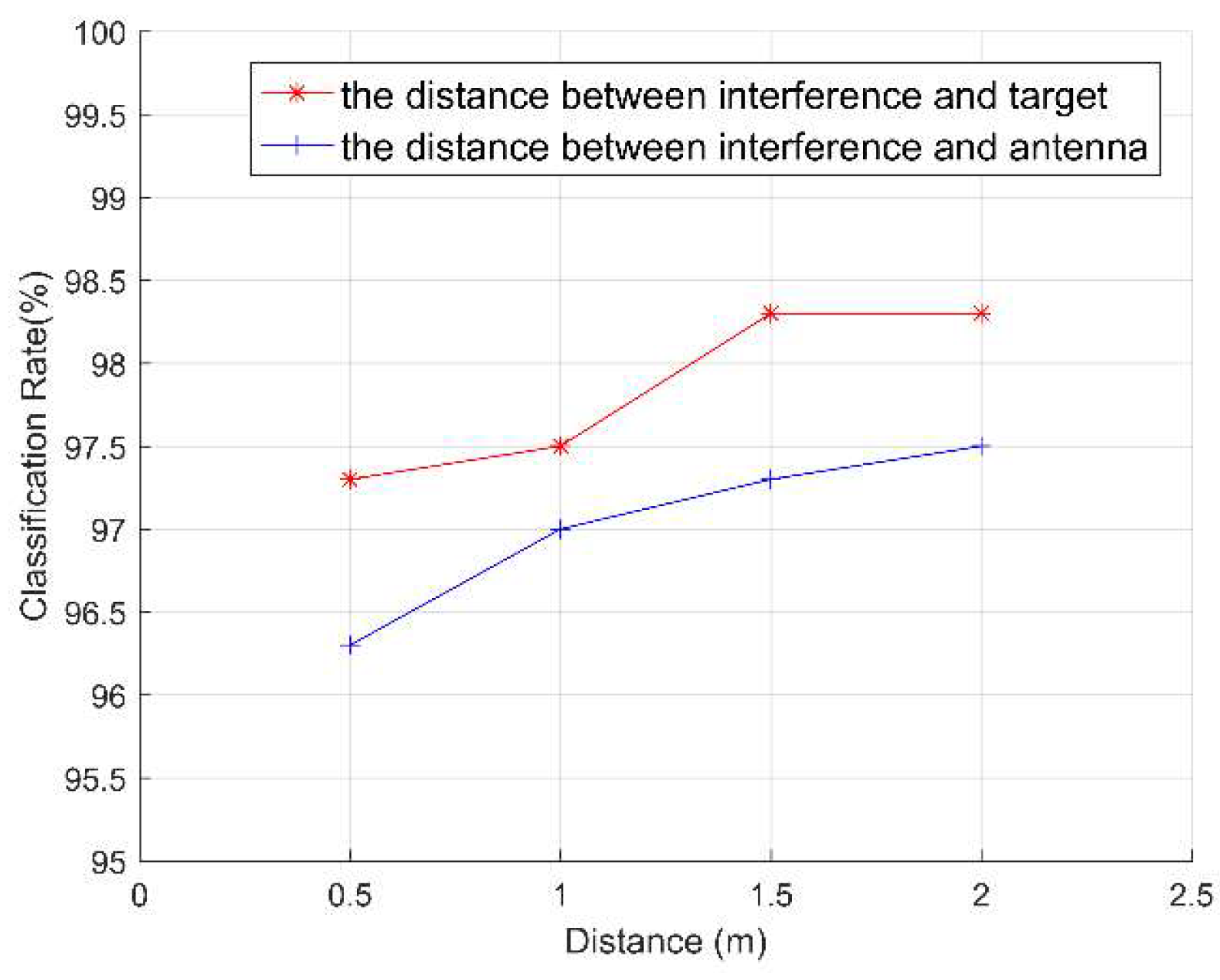
3.3.2. The Classification Accuracy of Different Distances
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Nanzer, J.A. A review of microwave wireless techniques for human presence detection and classification. IEEE Trans. Microw. Theory Tech. 2017, 65, 1780–1794. [Google Scholar] [CrossRef]
- Qi, F.; Liang, F.; Lv, H.; Li, C.; Chen, F.; Wang, J. Detection and classification of finer-grained human activities based on stepped-frequency continuous-wave through-wall radar. Sensors 2016, 16, 885. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Li, G.; Fioranelli, F.; Griffiths, H. Personnel recognition and gait classification based on multistatic micro-doppler signatures using deep convolutional neural networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 669–673. [Google Scholar] [CrossRef]
- Chen, V.C. Micro-Doppler effect of micromotion dynamics: A review. In Proceedings of the International Society for Optical Engineering (SPIE), Orlando, FL, USA, 29 March 2003; pp. 240–249. [Google Scholar]
- Yang, Y.; Hou, C.; Lang, Y.; Guan, D.; Huang, D.; Xu, J. Open-set human activity recognition based on micro-Doppler signatures. Pattern Recognit. 2019, 85, 60–69. [Google Scholar] [CrossRef]
- Erol, B.; Amin, M.G.; Gurbuz, S.Z. Automatic data-driven frequency-warped cepstral feature design for micro-Doppler classification. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1724–1738. [Google Scholar] [CrossRef]
- Fioranelli, F.; Ritchie, M.; Griffiths, H. Bistatic human micro-Doppler signatures for classification of indoor activities. In Proceedings of the 2017 IEEE Radar Conference, Seattle, WA, USA, 8–12 May 2017; pp. 610–615. [Google Scholar]
- Seyfioglu, M.S.; Ozbayoglu, A.M.; Gurbuz, S.Z. Deep convolutional autoencoder for radar-based classification of similar aided and unaided human activities. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1709–1723. [Google Scholar] [CrossRef]
- Li, W.; Tan, B.; Piechocki, R. Passive radar for opportunistic monitoring in e-health applications. IEEE J. Transl. Eng. Health Med. 2018, 6, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Chen, V. Doppler signatures of radar backscattering from objects with micro-motions. IET Signal Process. 2008, 2, 291–300. [Google Scholar] [CrossRef]
- Kim, Y.; Ling, H. Human activity classification based on micro-Doppler signatures using a support vector machine. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1328–1337. [Google Scholar]
- Narayanan, R.M.; Zenaldin, M. Radar micro-Doppler signatures of various human activities. IET Radar Sonar Navig. 2015, 9, 1205–1215. [Google Scholar] [CrossRef]
- Fioranelli, F.; Ritchie, M.; Griffiths, H. Multistatic human micro-Doppler classification of armed/unarmed personnel. IET Radar Sonar Navig. 2015, 9, 857–865. [Google Scholar] [CrossRef]
- Bjorklund, S.; Petersson, H.; Nezirovic, A.; Guldogan, M.B.; Gustafsson, F. Millimeter-wave radar micro-Doppler signatures of human motion. In Proceedings of the 2011 12th International Radar Symposium (IRS), Leipzig, Germany, 7–9 September 2011; pp. 167–174. [Google Scholar]
- Li, J.; Phung, S.L.; Tivive, F.H.C.; Bouzerdoum, A. Automatic classification of human motions using Doppler radar. In Proceedings of the 2012 International Joint Conference on Neural Networks (IJCNN), Brisbane, QLD, Australia, 30 July 2012; pp. 1–6. [Google Scholar]
- Fairchild, D.P.; Narayanan, R.M. Classification of human motions using empirical mode decomposition of human micro-Doppler signatures. IET Radar Sonar Navig. 2014, 8, 425–434. [Google Scholar] [CrossRef]
- Javier, R.J.; Kim, Y. Application of linear predictive coding for human activity classification based on micro-Doppler signatures. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1831–1834. [Google Scholar] [CrossRef]
- Fioranelli, F.; Ritchie, M.; Griffiths, H. Performance analysis of centroid and SVD features for personnel recognition using multistatic micro-Doppler. IEEE Geosci. Remote Sens. Lett. 2016, 13, 725–729. [Google Scholar] [CrossRef]
- Ritchie, M.; Ash, M.; Chen, Q.; Chetty, K. Through wall radar classification of human micro-Doppler using singular value decomposition analysis. Sensors 2016, 16, 1401. [Google Scholar] [CrossRef] [PubMed]
- Tivive, F.H.C.; Bouzerdoum, A.; Amin, M.G. Automatic human motion classification from Doppler spectrograms. In Proceedings of the 2010 2nd International Workshop on Cognitive Information Processing, Elba, Italy, 14–16 June 2010; pp. 237–242. [Google Scholar]
- Tekeli, B.; Gurbuz, S.Z.; Yuksel, M. Information-theoretic feature selection for human micro-Doppler signature classification. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2749–2762. [Google Scholar] [CrossRef]
- Orovic, I.; Stankovic, S.; Thayaparan, T.; Stankovic, L. Multiwindow S-method for instantaneous frequency estimation and its application in radar signal analysis. IET Signal Process. 2010, 4, 363–370. [Google Scholar] [CrossRef]
- Orović, I.; Stanković, S.; Amin, M. A new approach for classification of human gait based on time-frequency feature representations. Signal Process. 2011, 91, 1448–1456. [Google Scholar] [CrossRef]
- Li, F.; Yang, C.; Xia, Y.; Ma, X.; Zhang, T.; Zhou, Z. An adaptive S-method to analyze micro-Doppler signals for human activity classification. Sensors 2017, 17, 2769. [Google Scholar] [CrossRef]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Mitola, J.I. Cognitive Radio: An Integrated Agent Architecture for Software Defined Radio. Ph.D. Thesis, Royal Institute of Technology, Stockholm, Sweden, 2000. [Google Scholar]
- Camarena-Martinez, D.; Valtierra-Rodriguez, M.; Perez-Ramirez, C.A.; Amezquita-Sanchez, J.P.; de Jesus Romero-Troncoso, R.; Garcia-Perez, A. Novel downsampling empirical mode decomposition approach for power quality analysis. IEEE Trans. Ind. Electron. 2016, 63, 2369–2378. [Google Scholar] [CrossRef]
- Stockwell, R.G.; Mansinha, L.; Lowe, R.P. Localization of the complex spectrum: The S transform. IEEE Trans. Signal Process. 1996, 44, 998–1001. [Google Scholar] [CrossRef]
- Stankovic, L. A method for time-frequency analysis. IEEE Trans. Signal Process. 1994, 42, 225–229. [Google Scholar] [CrossRef]
- Yang, L.; Li, G.; Ritchie, M.; Fioranelli, F.; Griffiths, H. Gait classification based on micro-doppler features. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; pp. 1–4. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Single Arm | Both Arms | Running | Without Arm | |
|---|---|---|---|---|
| Single Arm | 96 | 3 | 0 | 1 |
| Both Arms | 3 | 95 | 2 | 0 |
| Running | 0 | 0 | 100 | 0 |
| Without Arm | 1 | 1 | 0 | 98 |
| Single Arm | Both Arms | Running | Without Arm | |
|---|---|---|---|---|
| Single Arm | 78 | 17 | 0 | 5 |
| Both Arms | 14 | 81 | 0 | 5 |
| Running | 0 | 0 | 100 | 0 |
| Without Arm | 5 | 0 | 0 | 95 |
| Single Arm | Both Arms | Running | Without Arm | |
|---|---|---|---|---|
| Single Arm | 92 | 8 | 0 | 0 |
| Both Arms | 12 | 88 | 0 | 0 |
| Running | 0 | 0 | 100 | 0 |
| Without Arm | 15 | 2 | 0 | 83 |
| Single Arm | Both Arms | Running | Without Arm | |
|---|---|---|---|---|
| Single Arm | 73 | 20 | 0 | 7 |
| Both Arms | 23 | 77 | 0 | 0 |
| Running | 0 | 0 | 100 | 0 |
| Without Arm | 10 | 7 | 0 | 83 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, X.; Zhao, R.; Liu, X.; Kuang, H.; Al-qaness, M.A.A. Classification of Human Motions Using Micro-Doppler Radar in the Environments with Micro-Motion Interference. Sensors 2019, 19, 2598. https://doi.org/10.3390/s19112598
Ma X, Zhao R, Liu X, Kuang H, Al-qaness MAA. Classification of Human Motions Using Micro-Doppler Radar in the Environments with Micro-Motion Interference. Sensors. 2019; 19(11):2598. https://doi.org/10.3390/s19112598
Chicago/Turabian StyleMa, Xiaolin, Running Zhao, Xinhua Liu, Hailan Kuang, and Mohammed A. A. Al-qaness. 2019. "Classification of Human Motions Using Micro-Doppler Radar in the Environments with Micro-Motion Interference" Sensors 19, no. 11: 2598. https://doi.org/10.3390/s19112598