E-Knitted Textile with Polymer Optical Fibers for Friction and Pressure Monitoring in Socks

 , and
, and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. POF Implementation in Knitted Structures
2.2. Polymer Optical Fibers
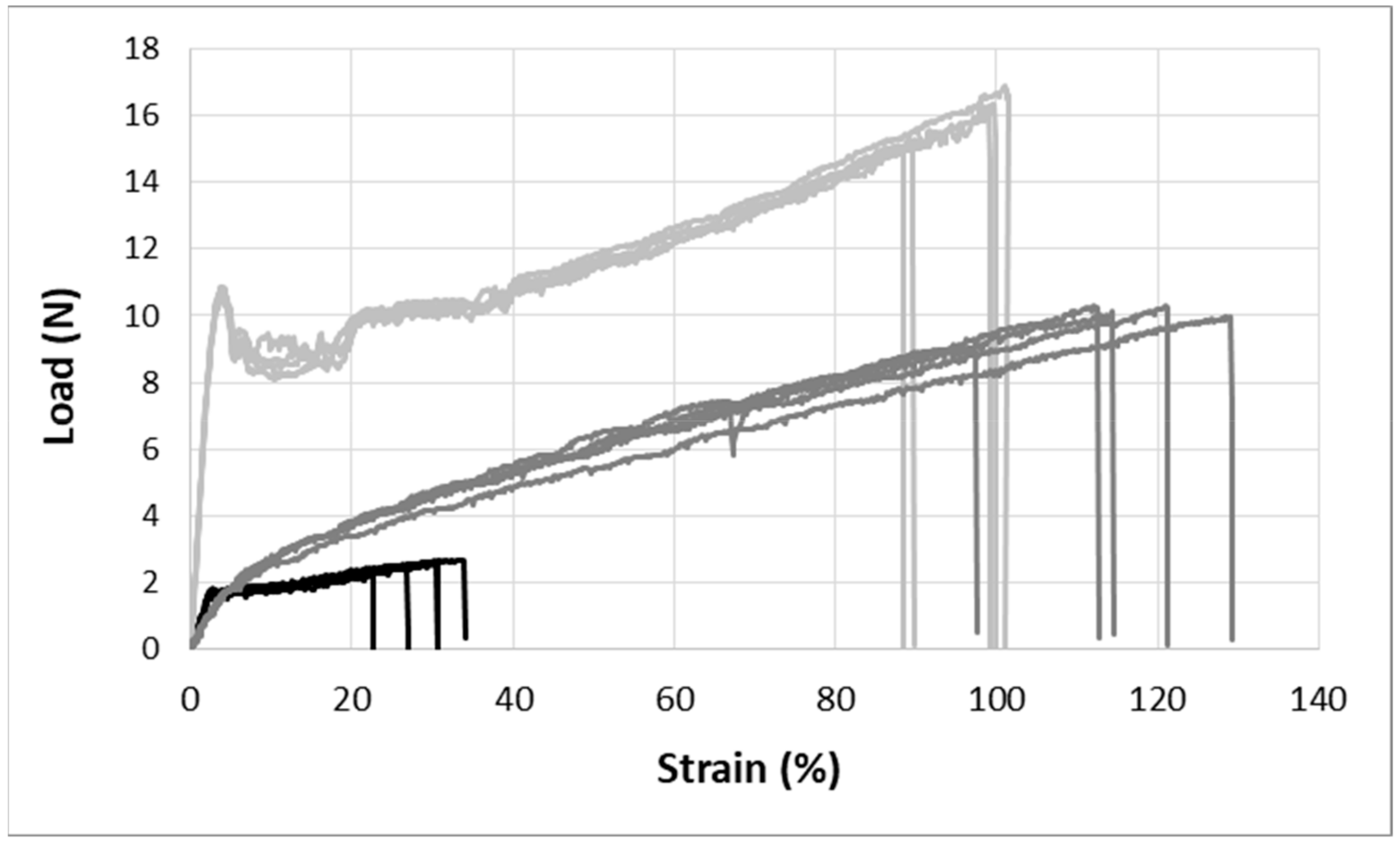
- GigaPOF 50-SR from Chromis Fiberoptics (Warren, NJ, USA), made with perfluorinated polymer CYTOP® [62], with a core diameter of 50 µm and a cladding of 490 µm. According to the manufacturer, this POF supports a maximum tensile load of 7 N and has a minimum bending radius of 5 mm.
- A bi-component fiber made of cyclo-olefin/fluorinated polymer and provided by Empa (ref. 1144), with a diameter of 144 ± 4 µm.
- A mono-component fiber using a Geniomer® 100 polymer, with a diameter of 824 ± 13µm, also produced by Empa (ref.1263).
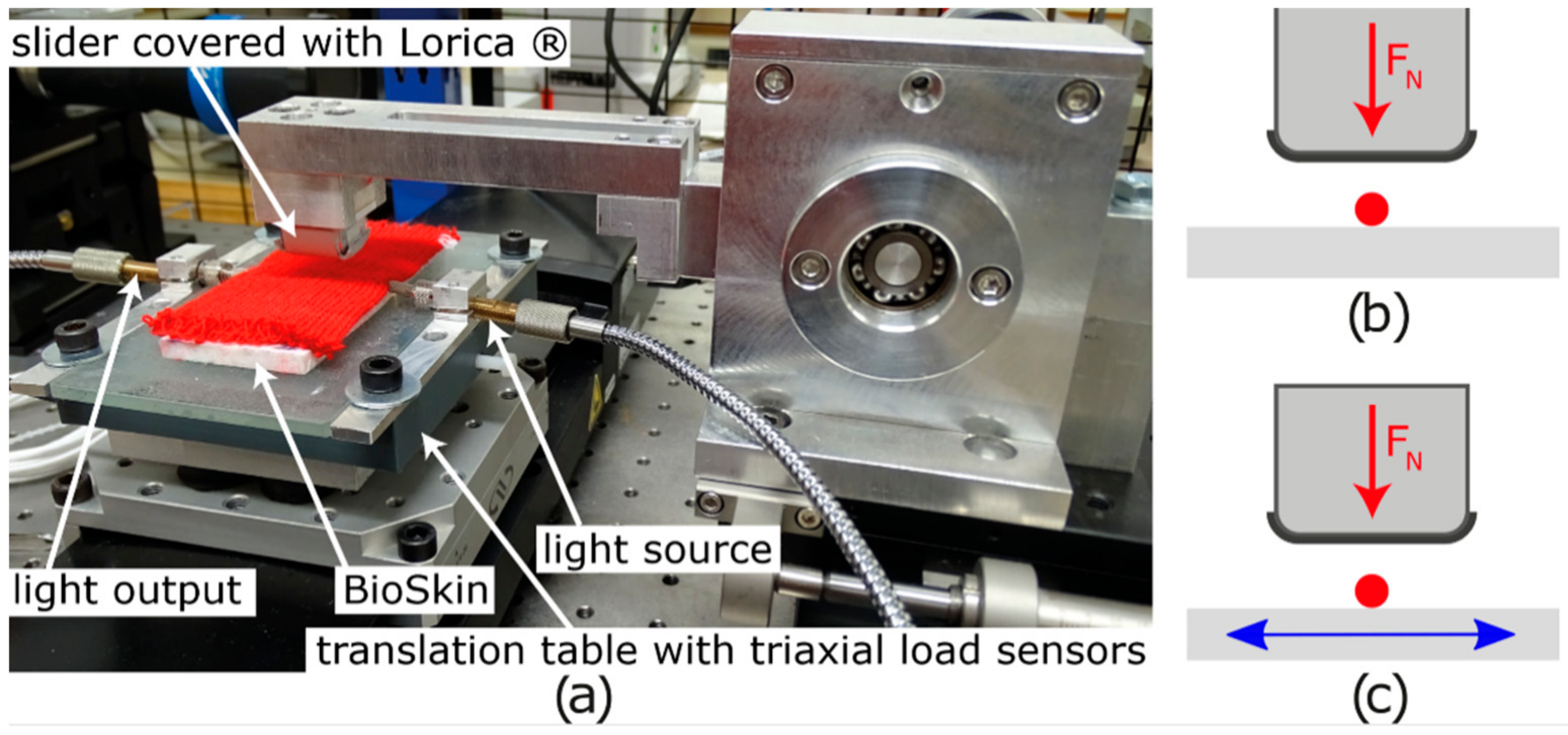
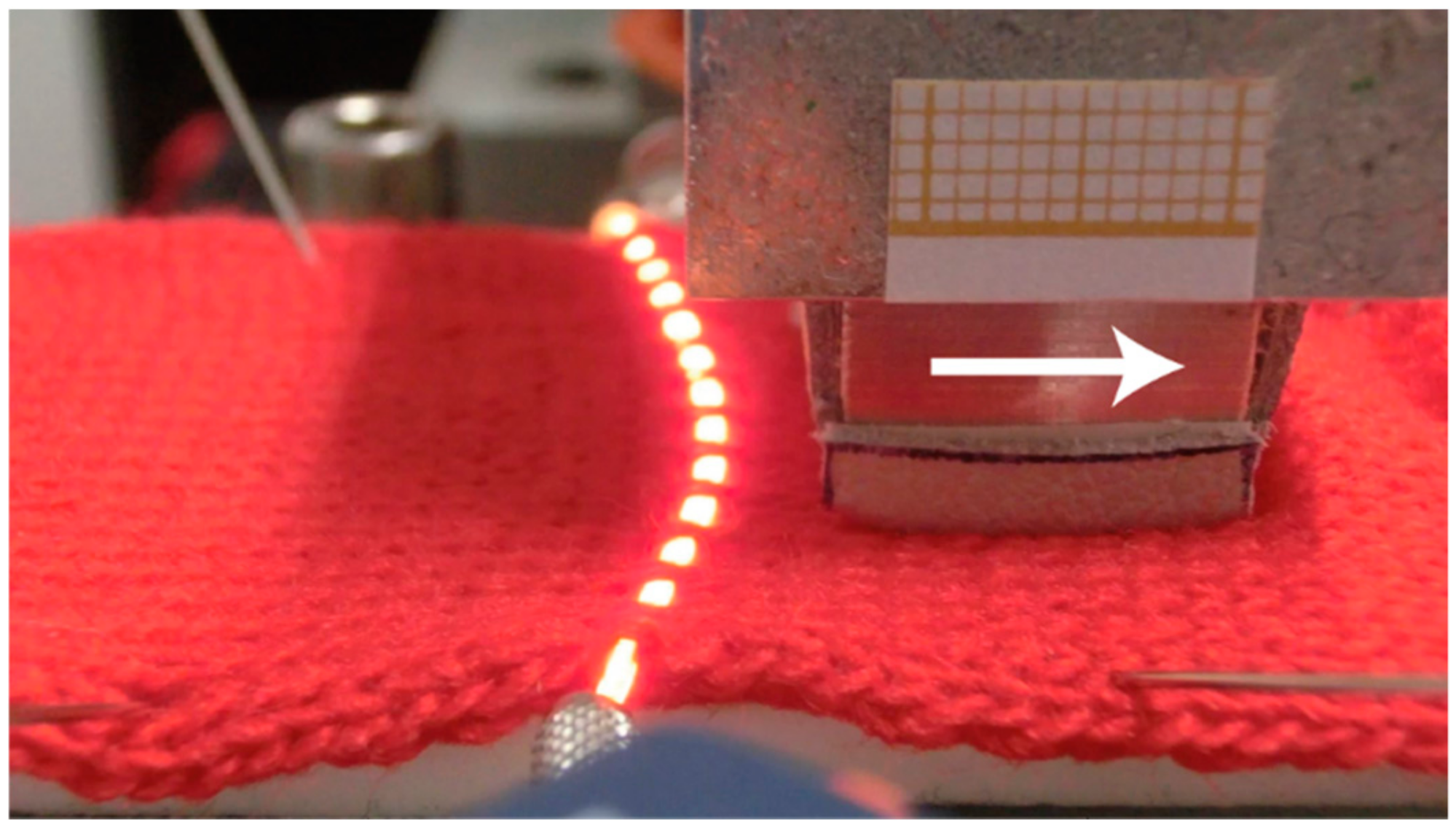
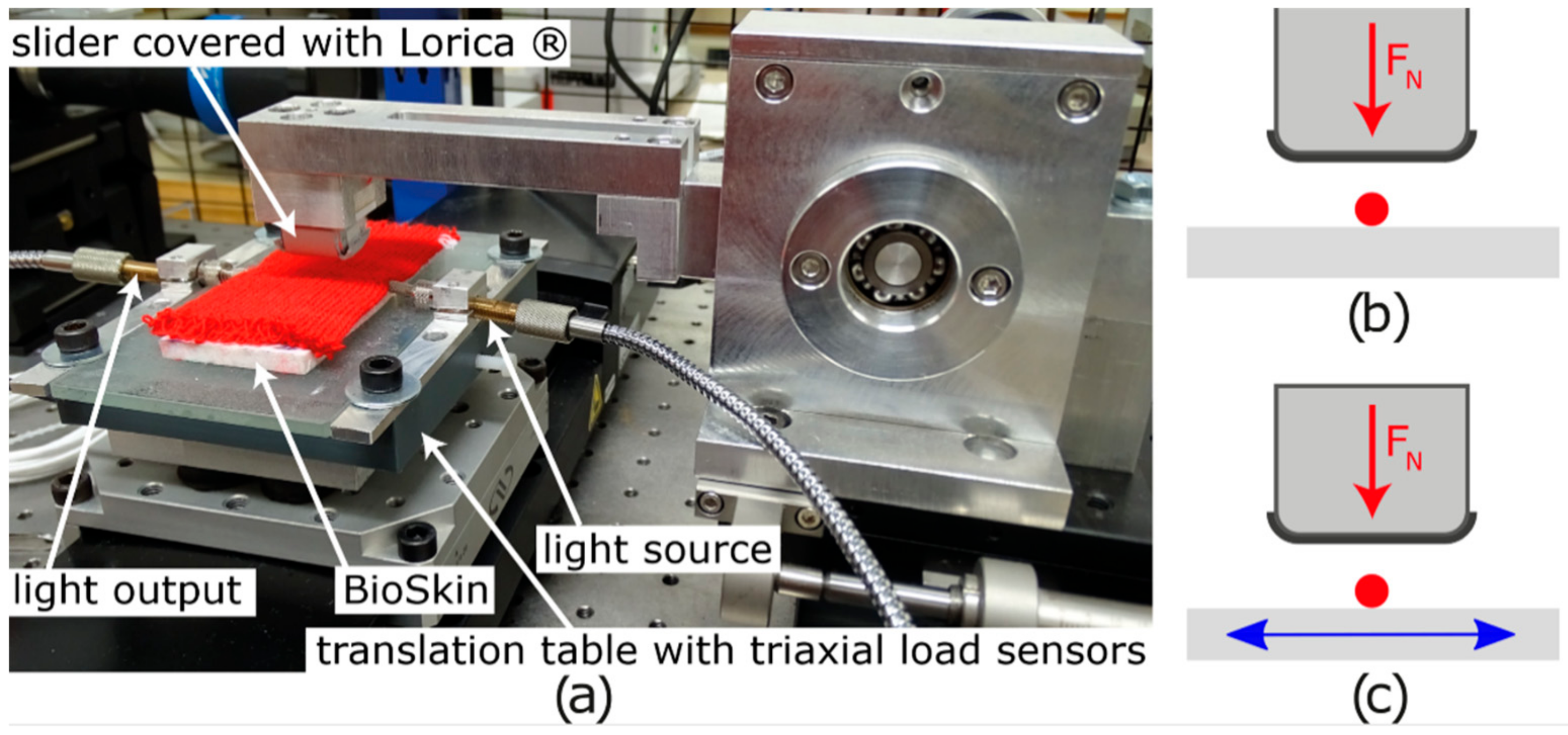
2.3. Friction and Compression Measurements
2.4. Light Measurement
3. Results
3.1. 2D Knitted Fabrics with Insertion of Optical Fibers
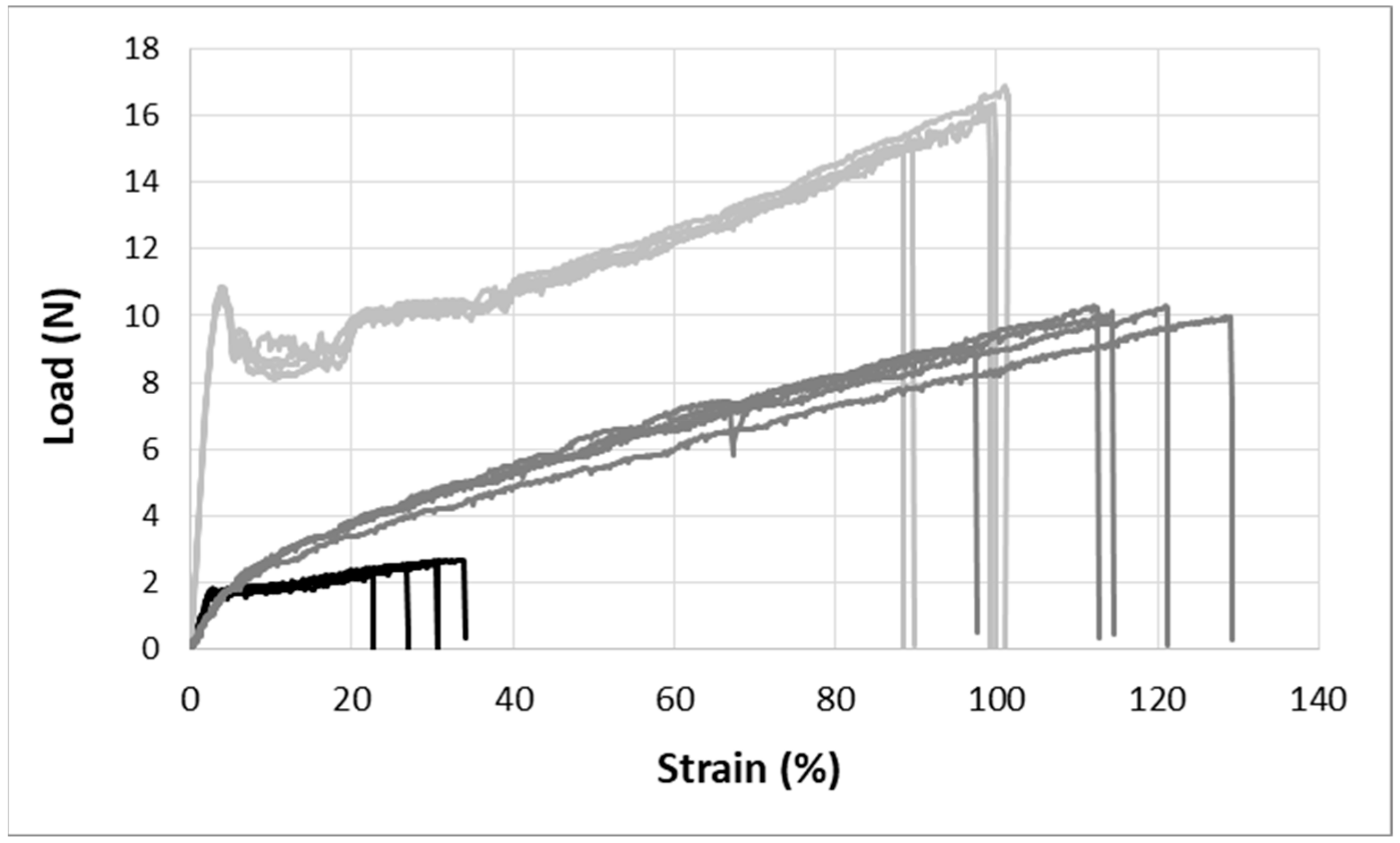
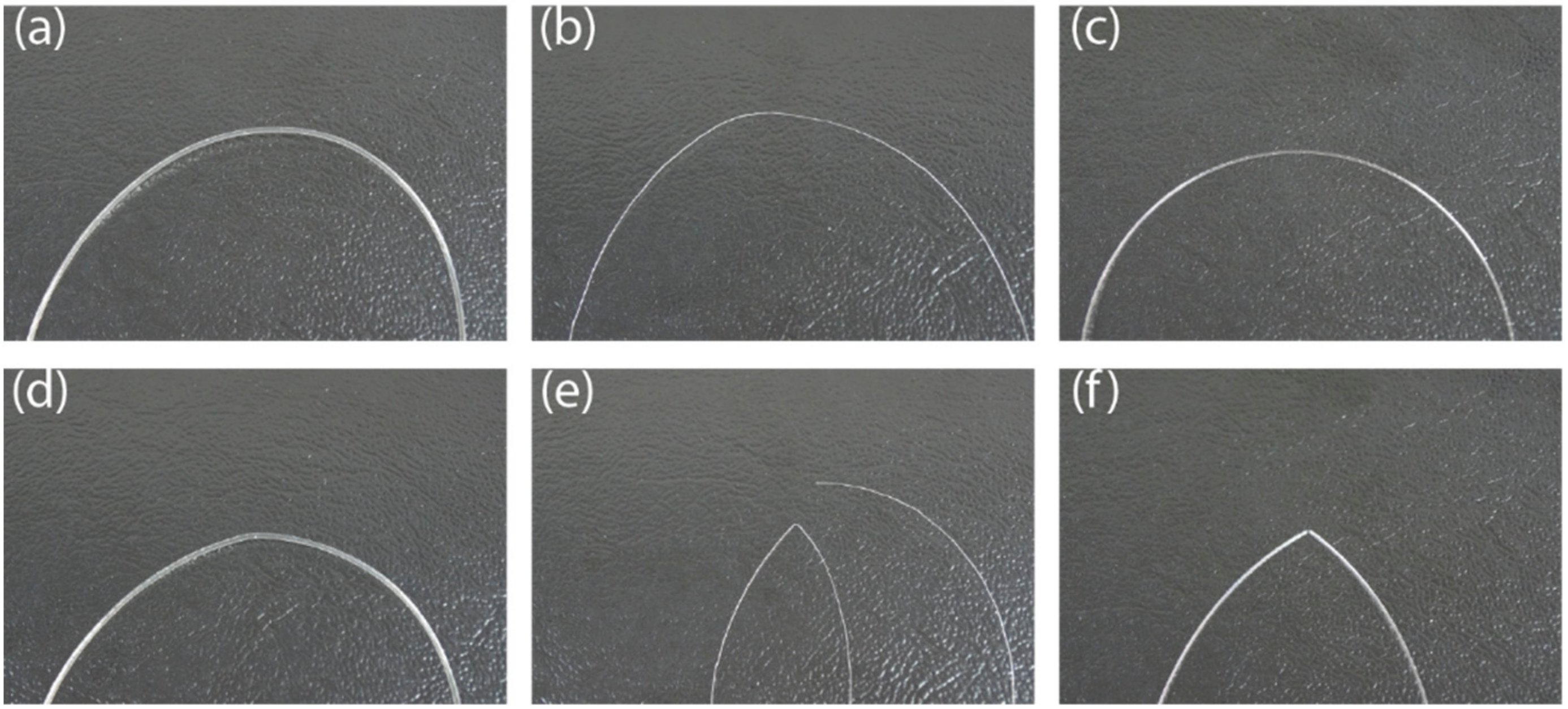
3.1.1. Choice of Polymer Optical Fiber
3.1.2. 2D Knitted Fabrics
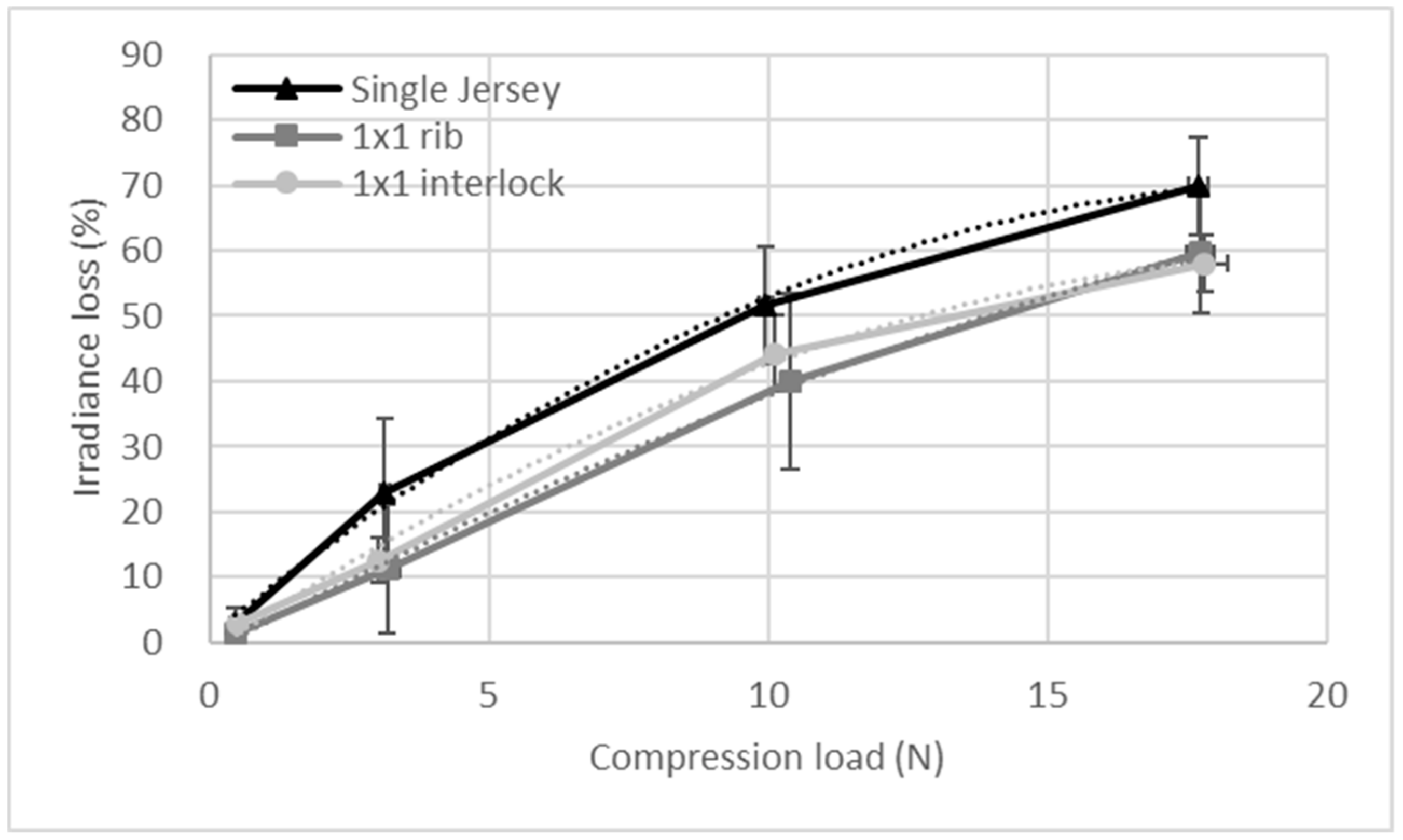
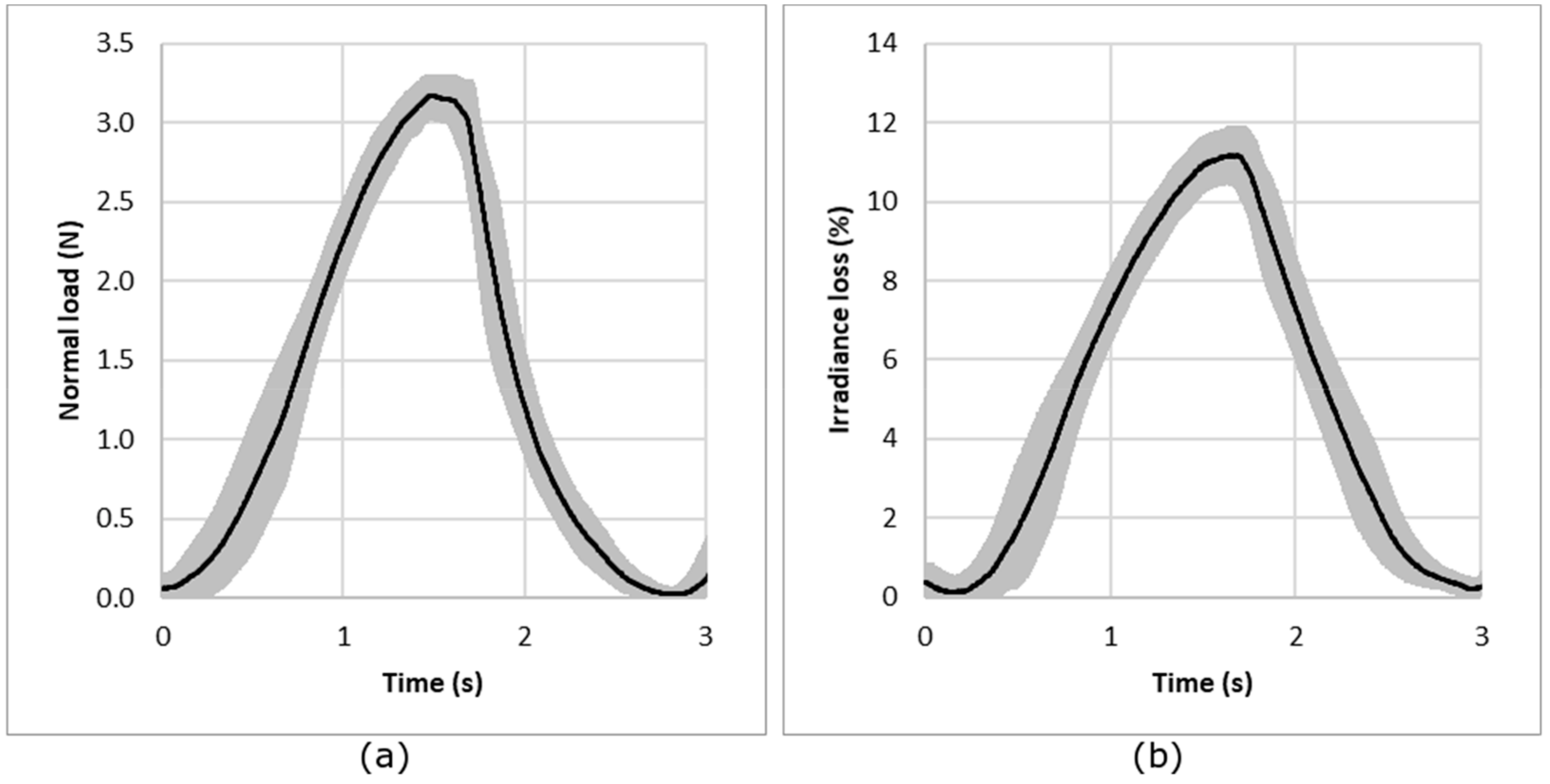
3.2. Knitted Fabric Compression Sensitivity
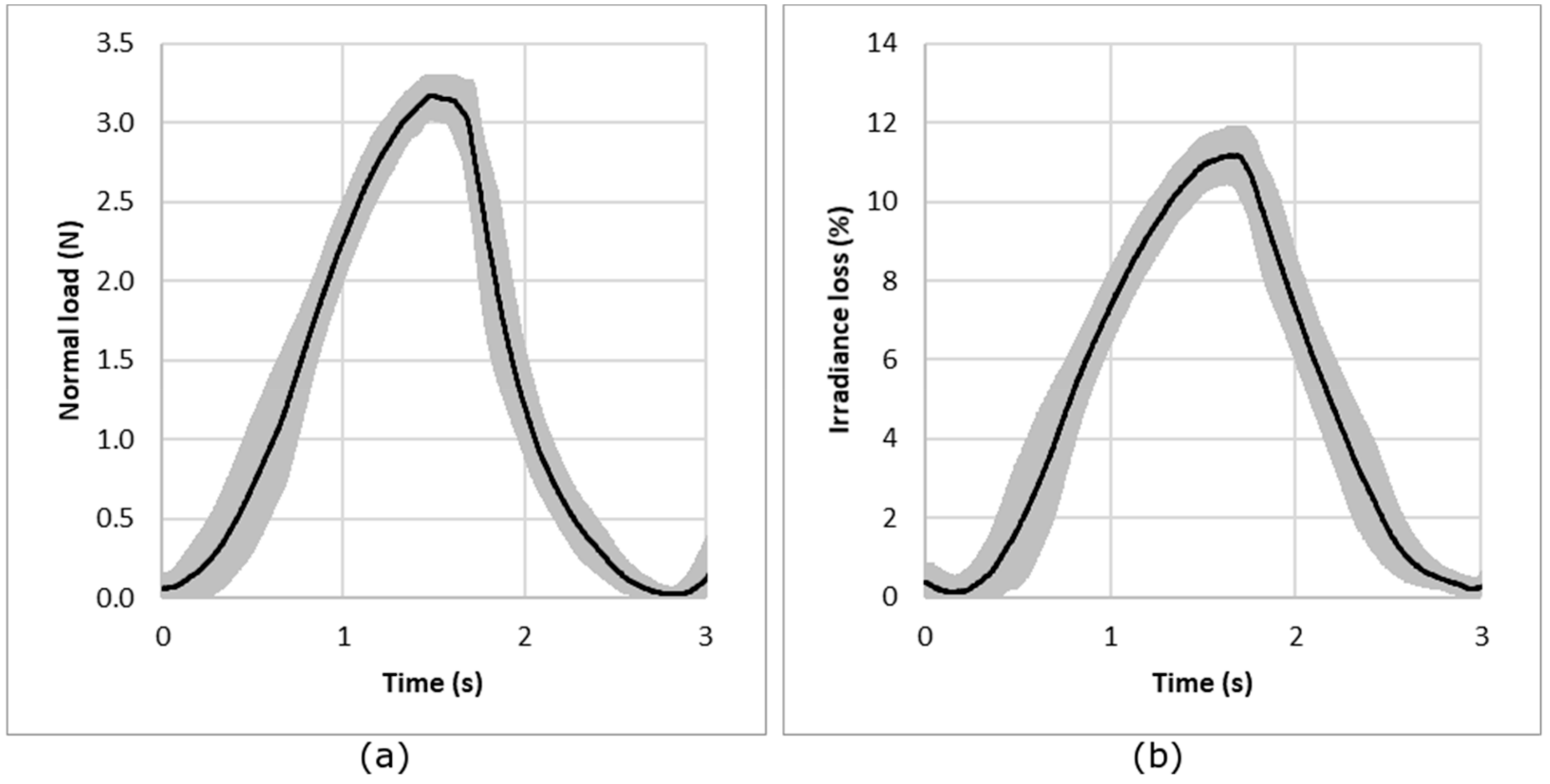
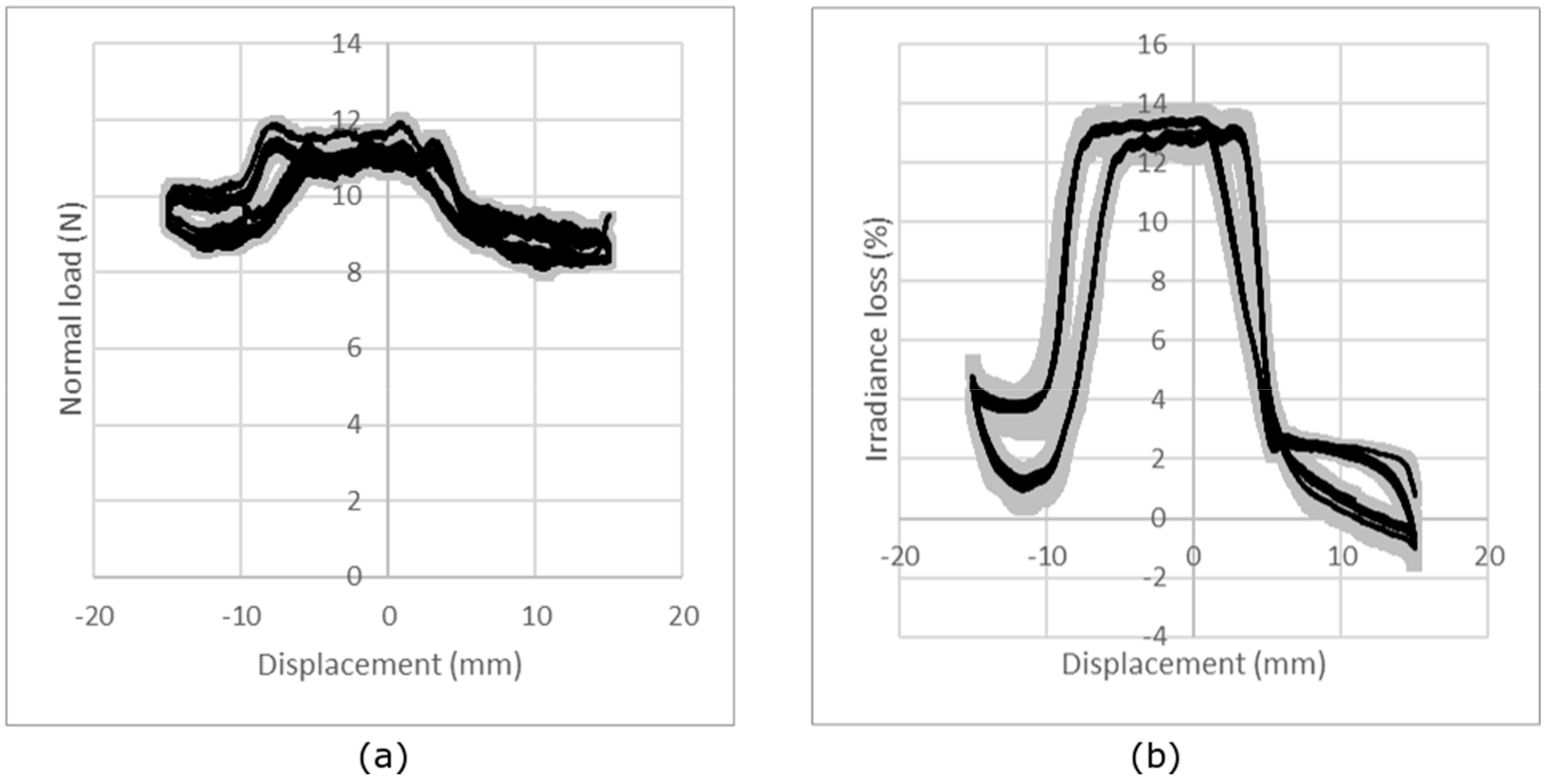
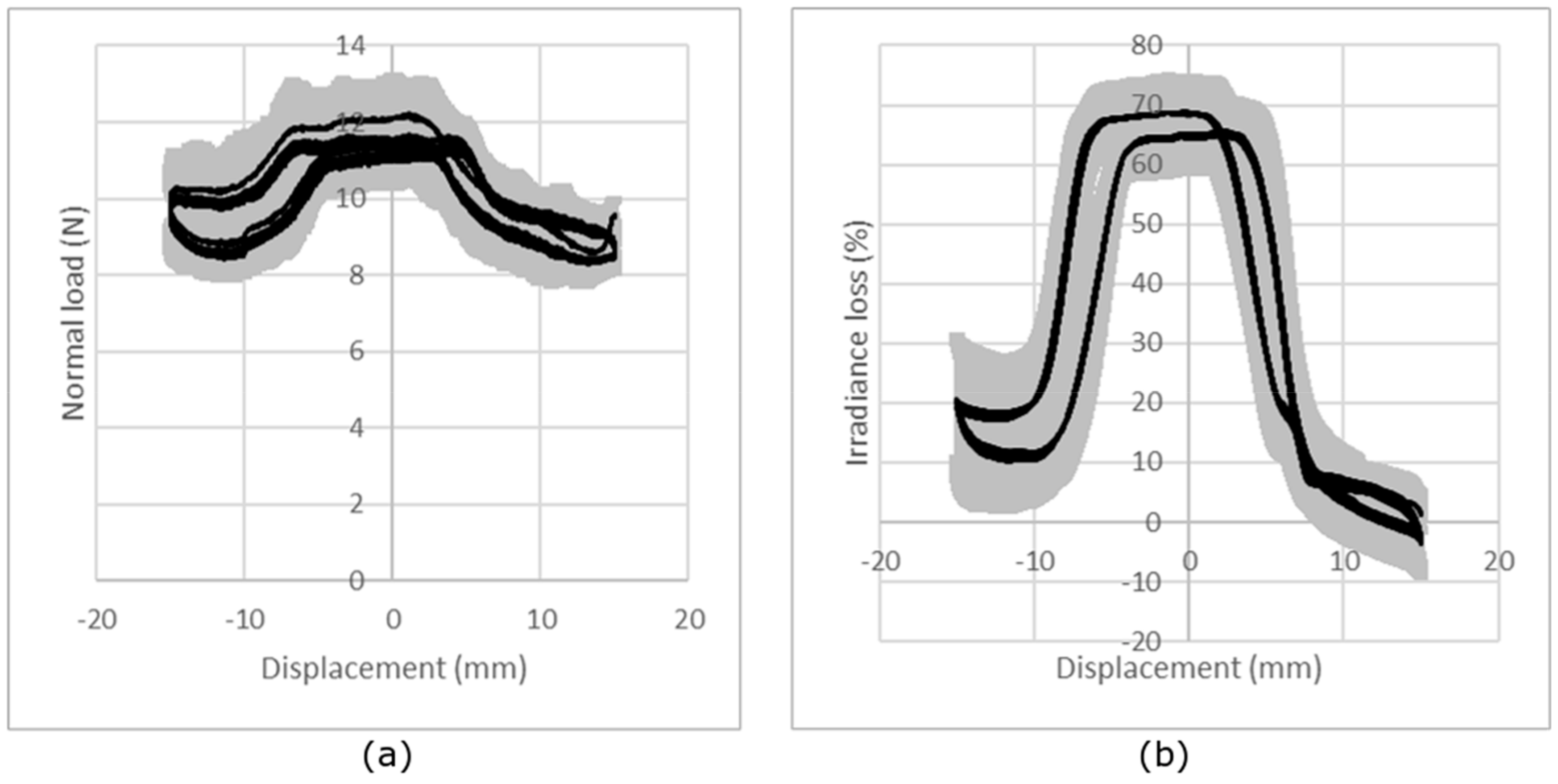
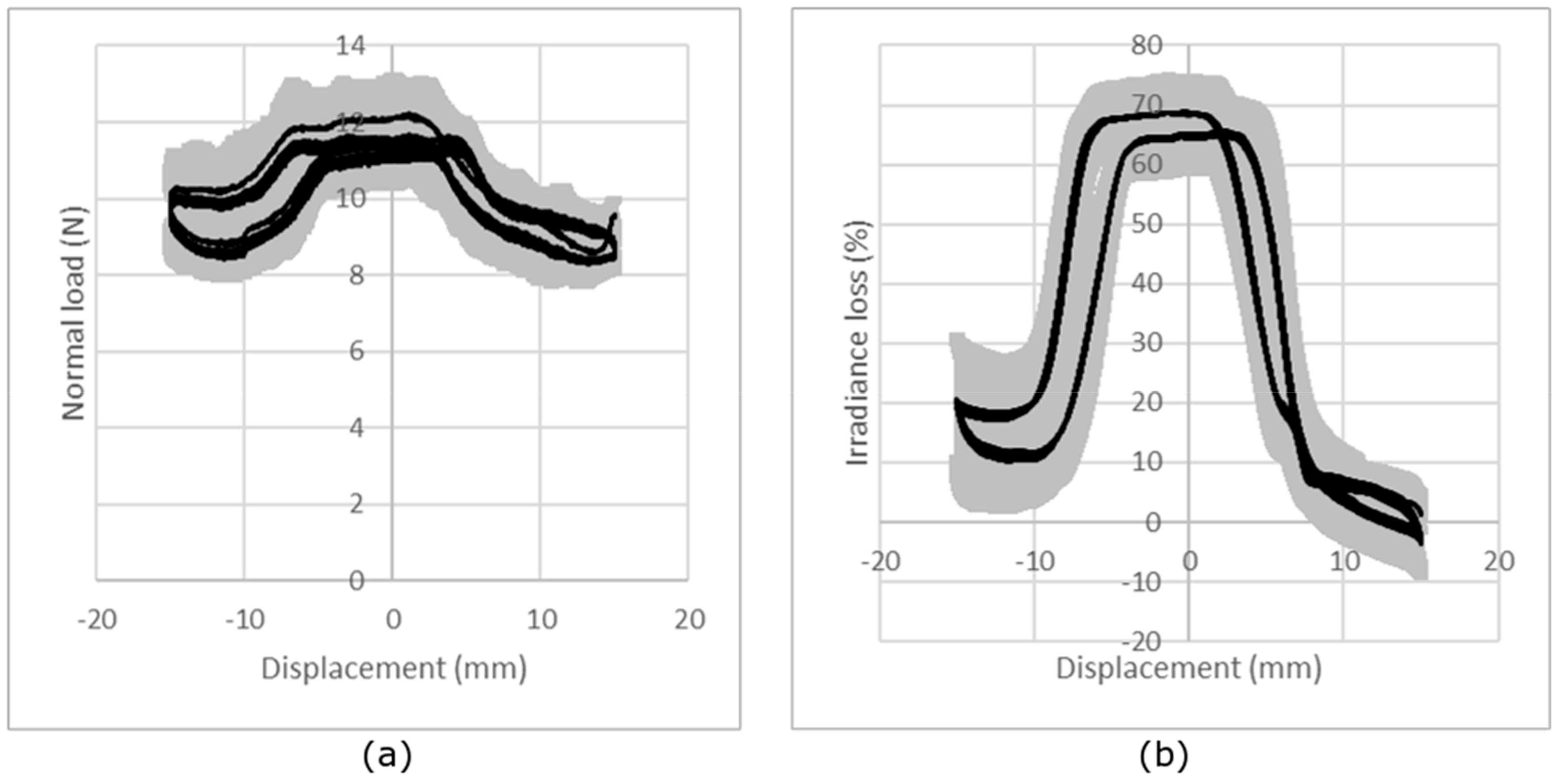
3.2.1. Measurement Repeatability and Reproducibility
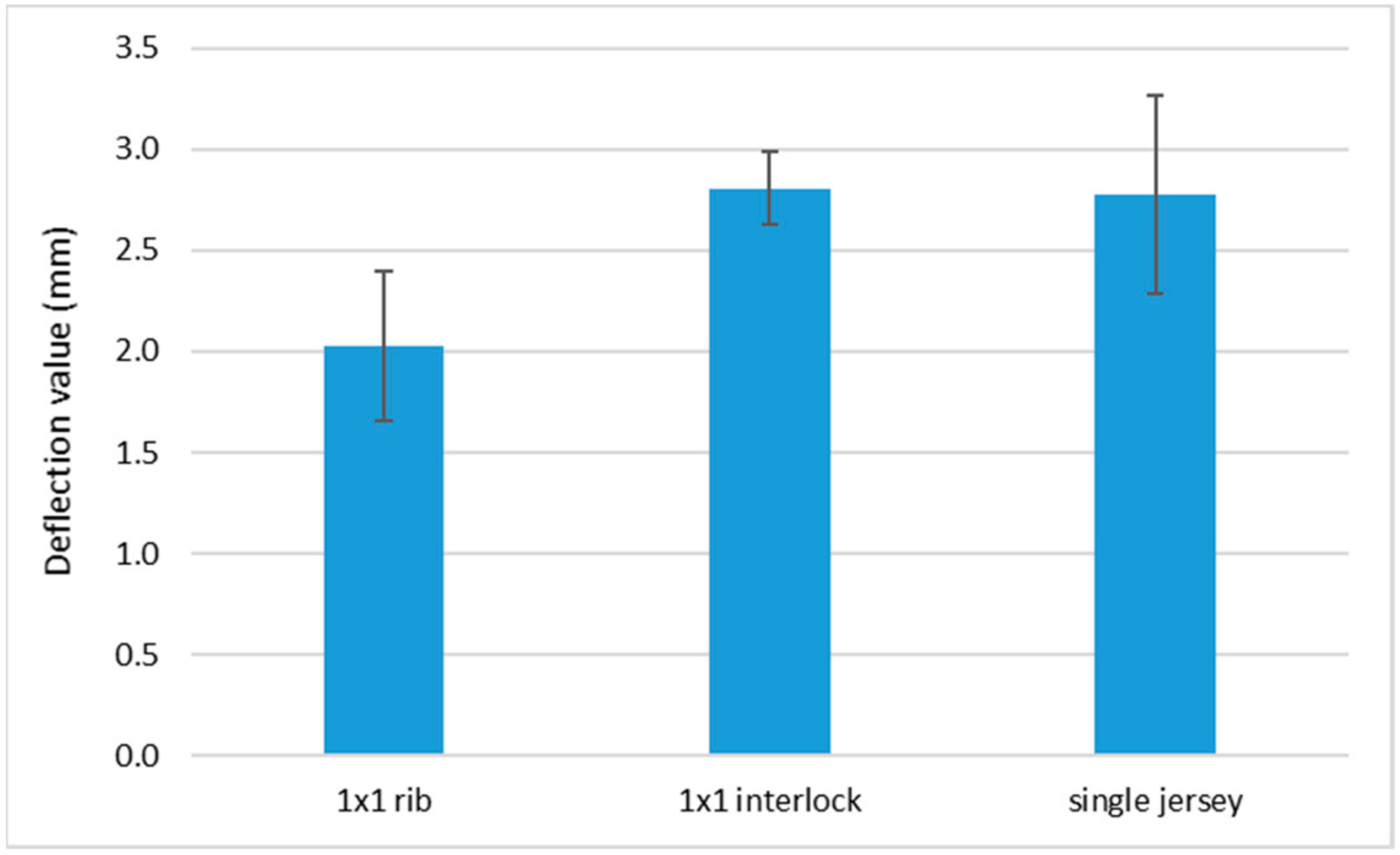
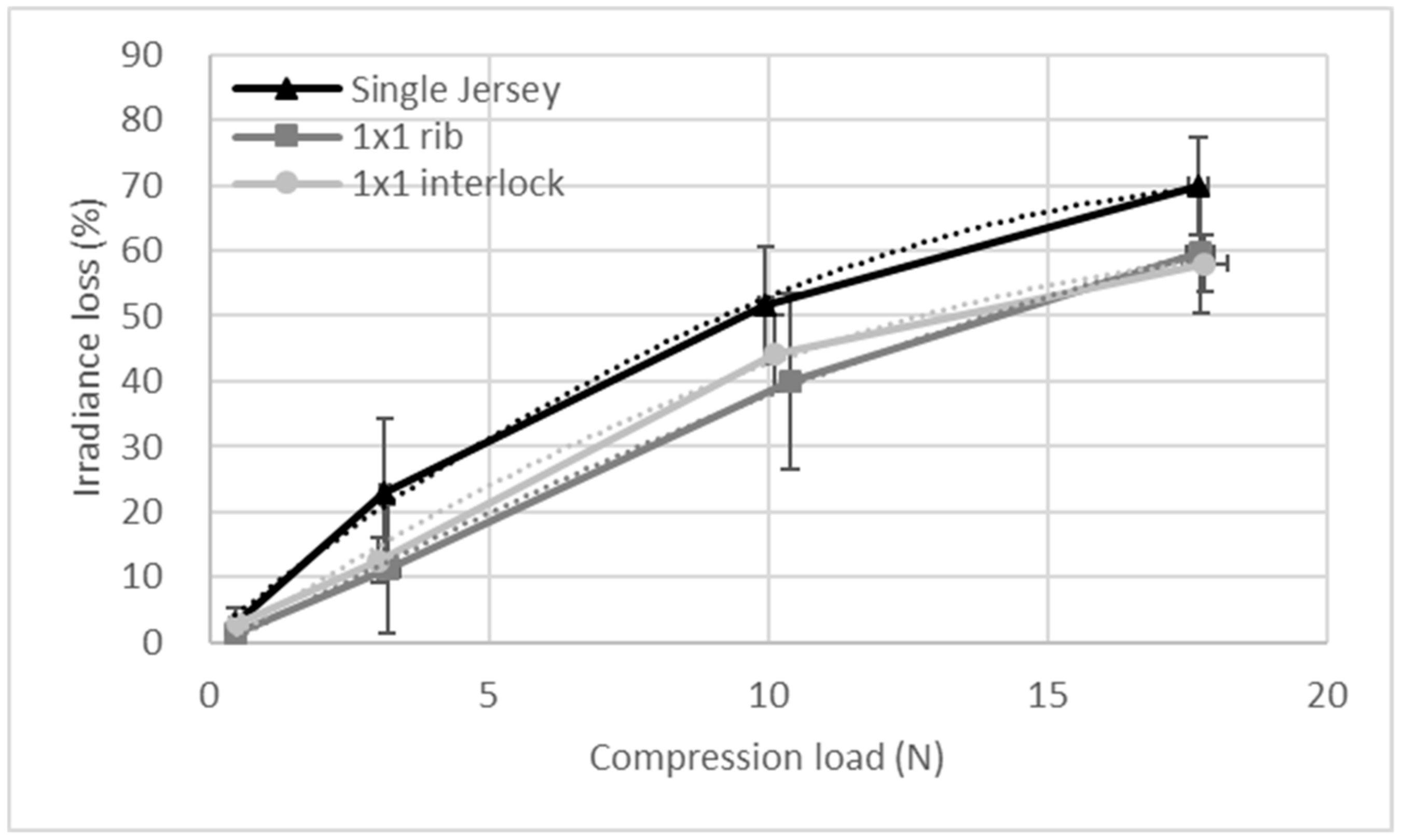
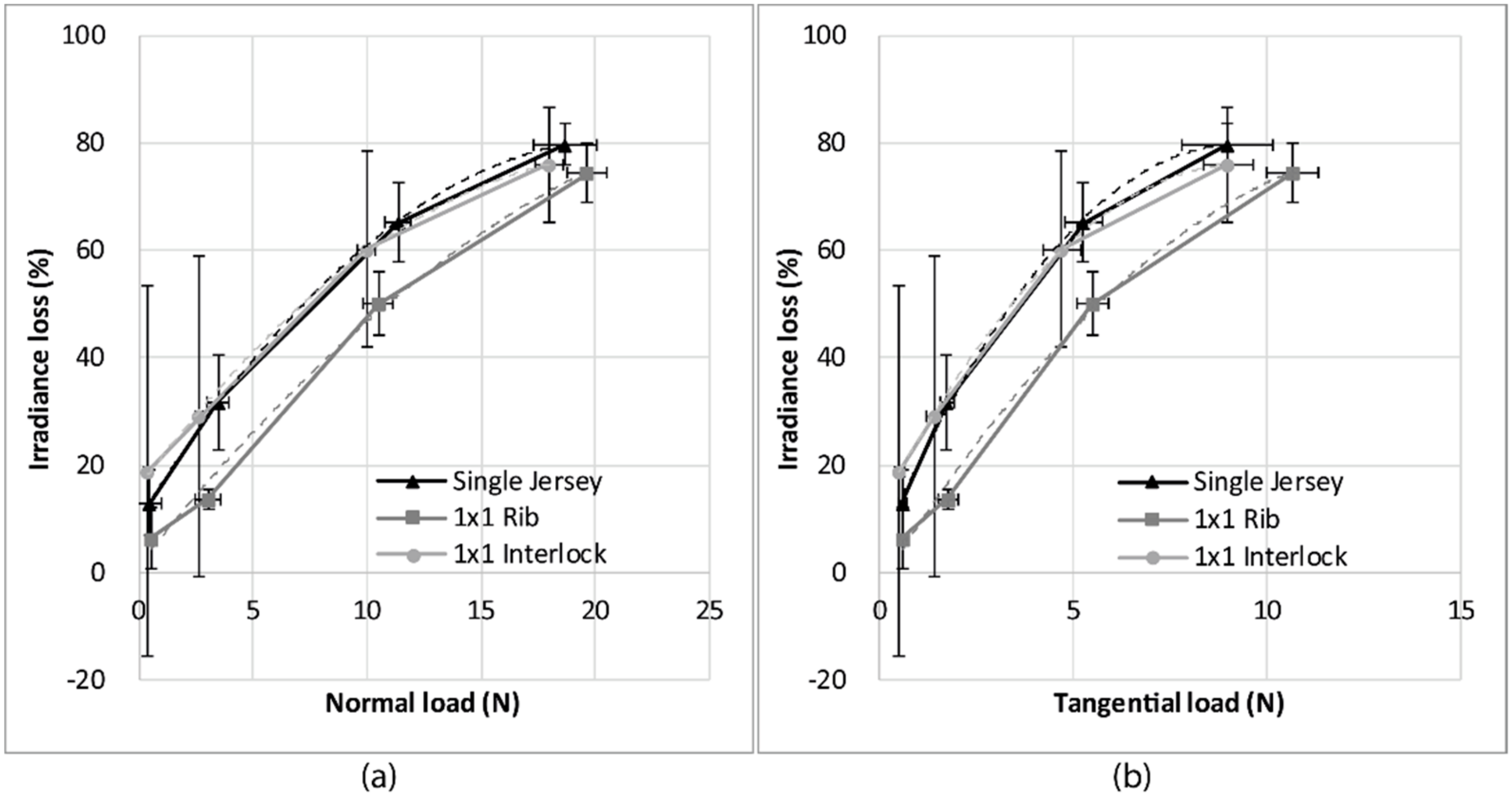
3.2.2. Influence of the Knitted Fabric Structure
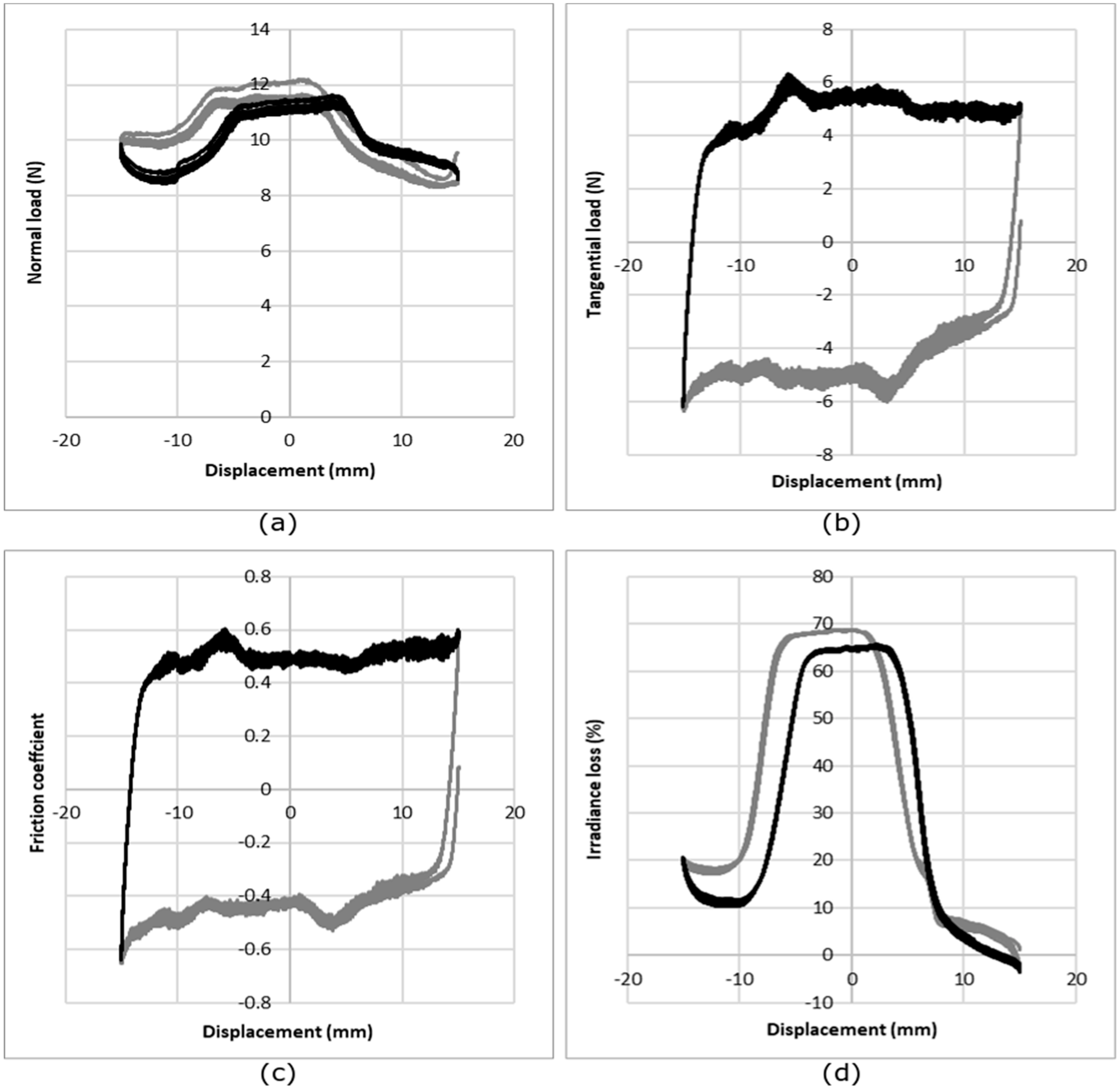
3.3. Knitted Fabric Friction Sensitivity
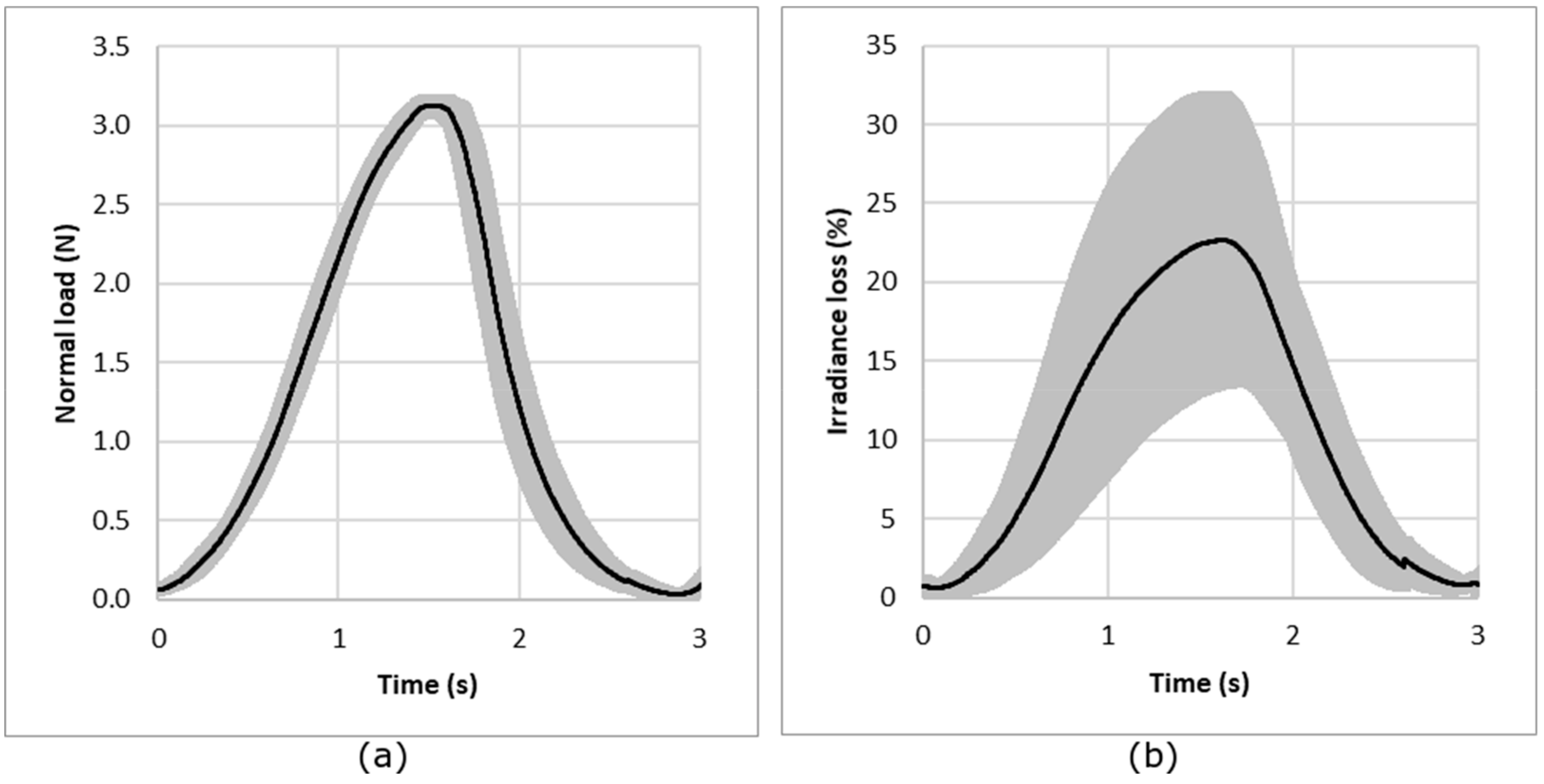
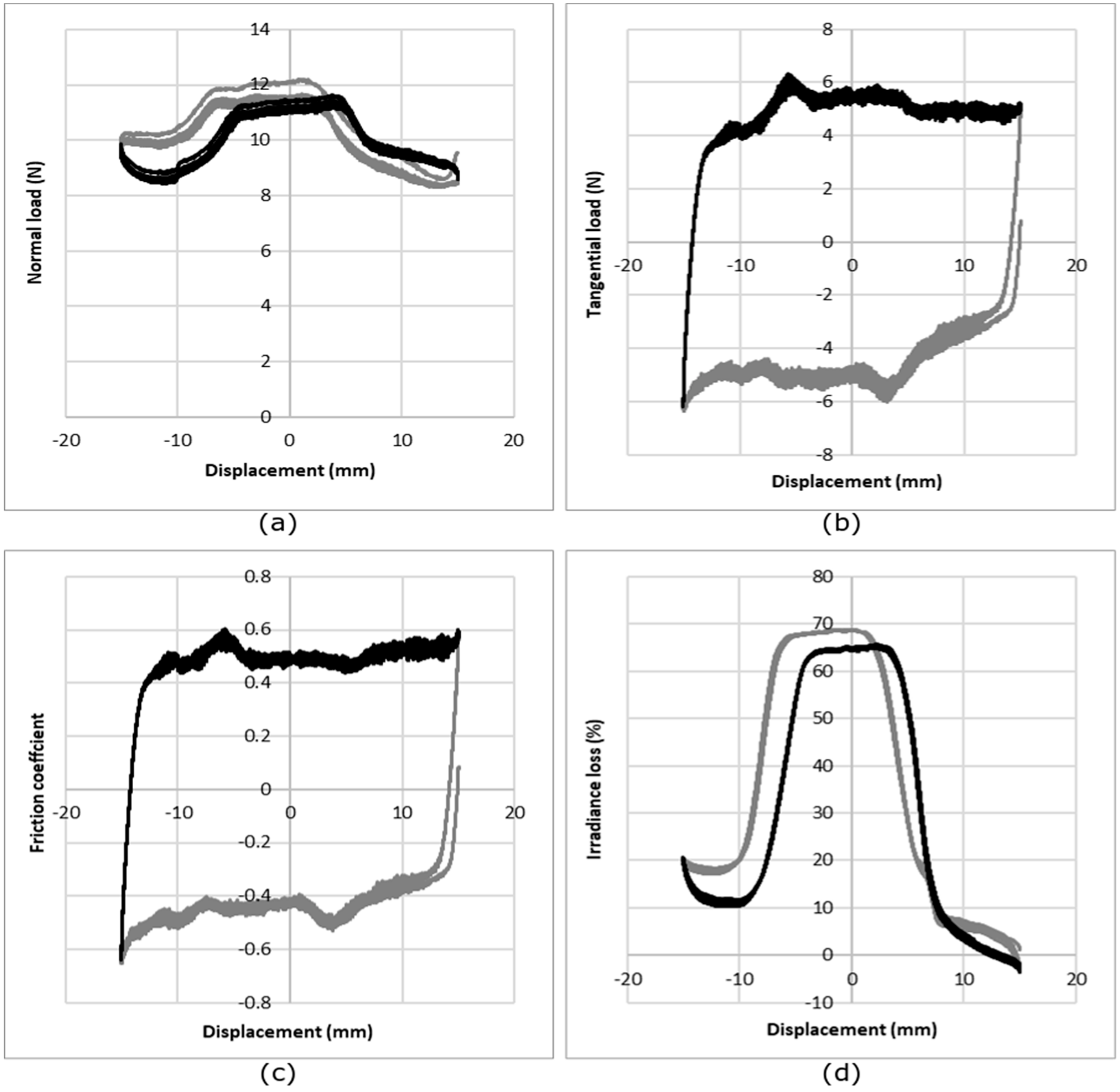
3.3.1. Measurement Repeatability and Reproducibility
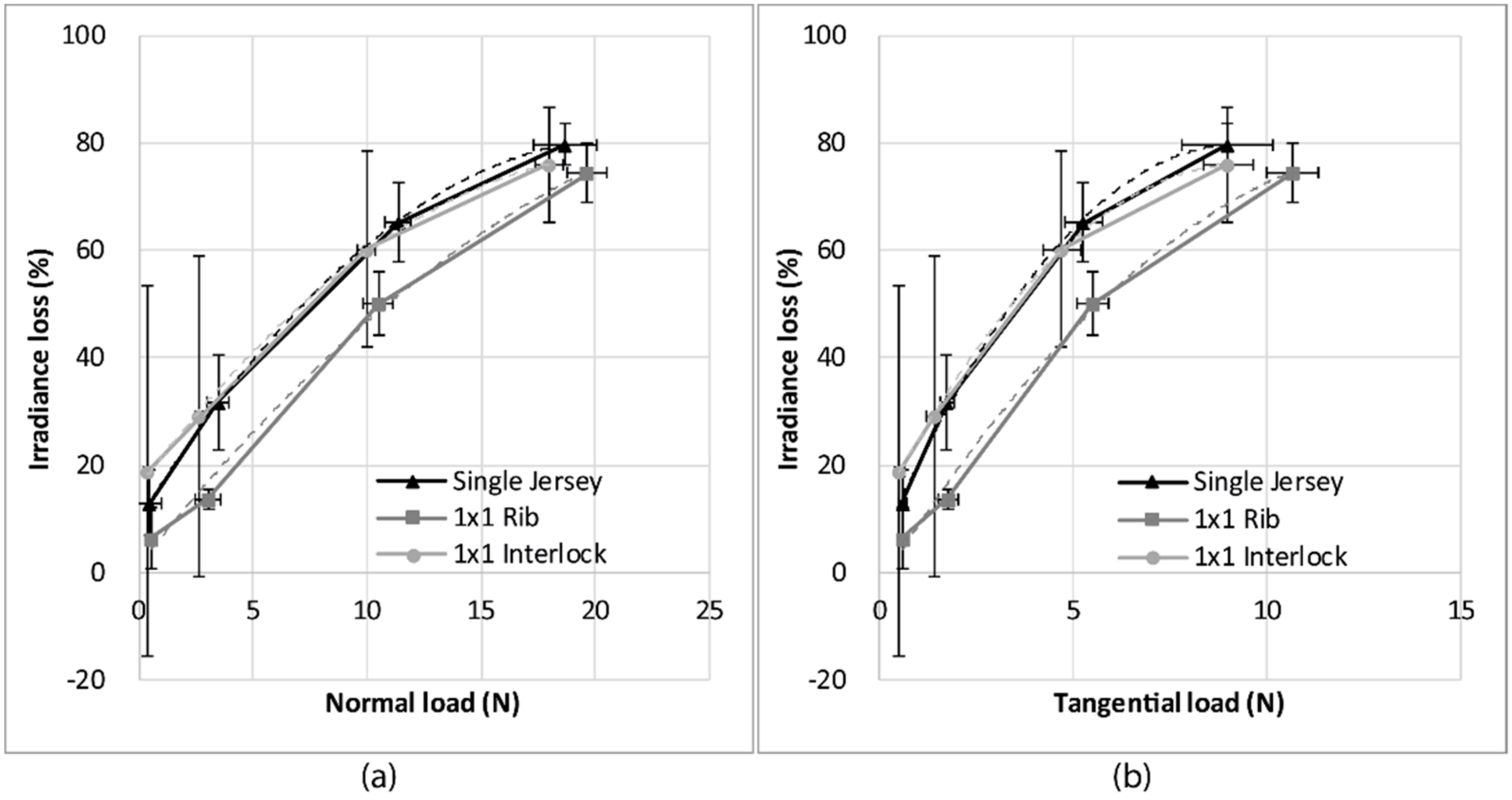
3.3.2. Influence of the Knitted Fabric Structure
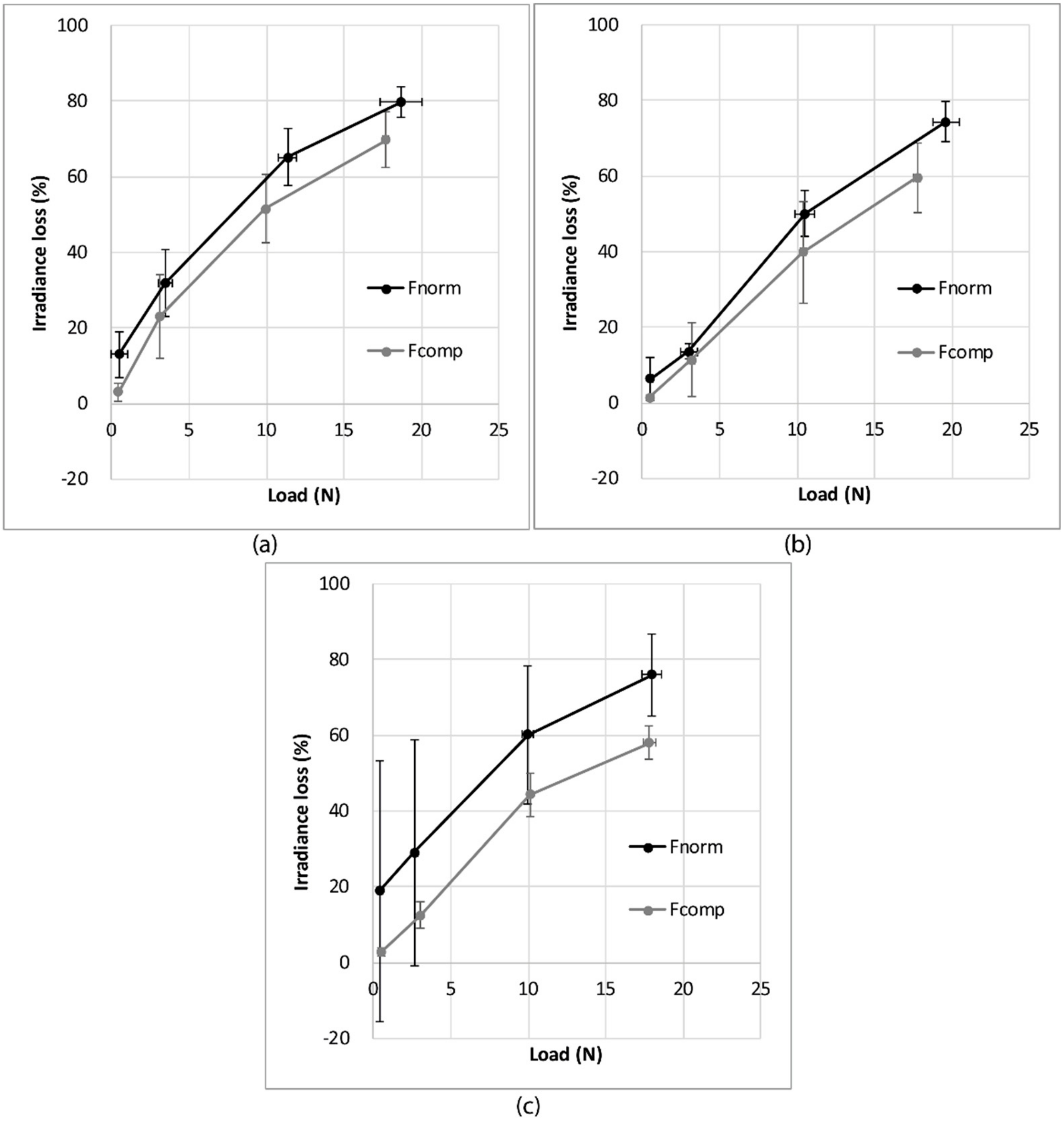
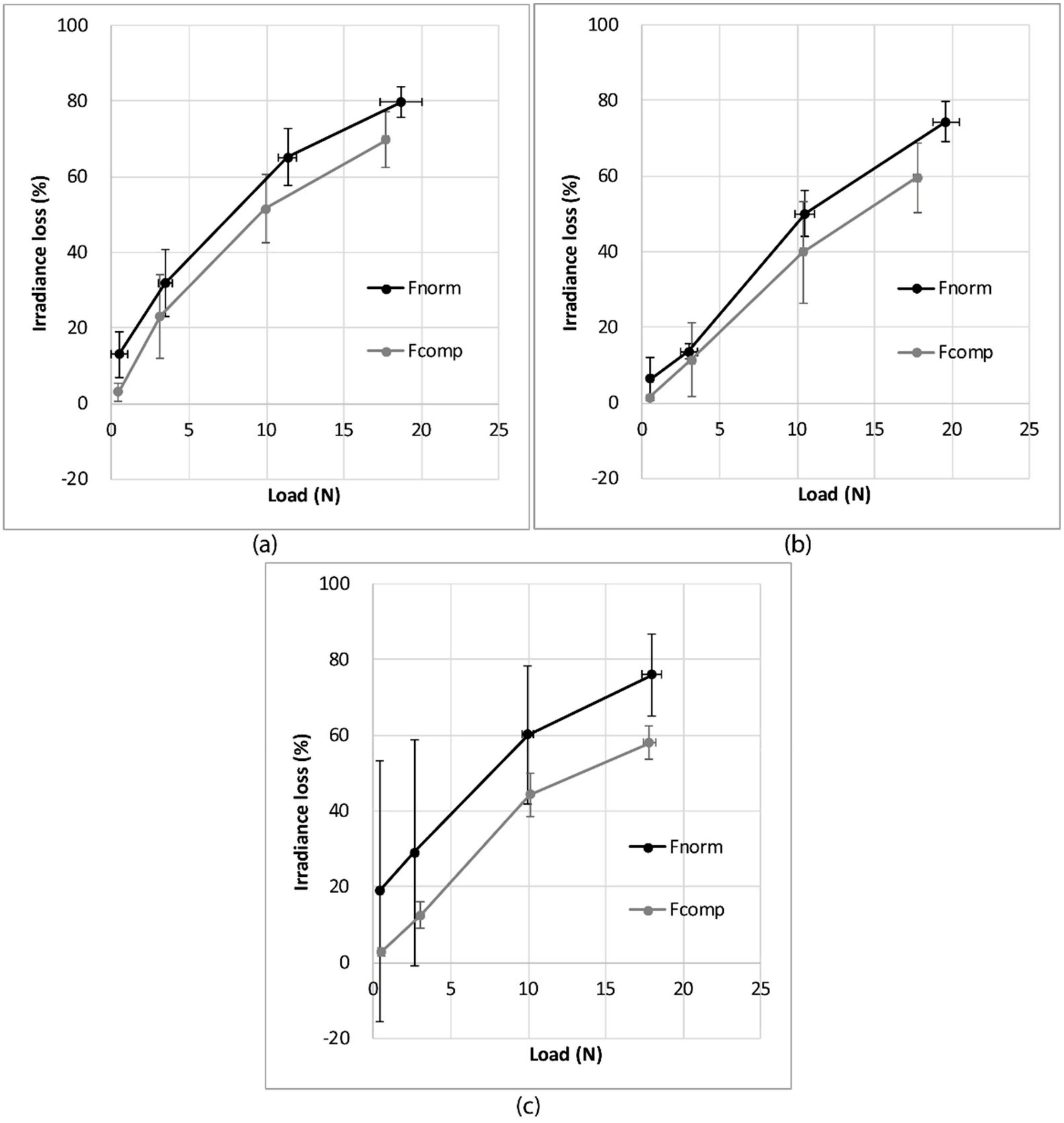
3.4. Knitted Fabric Friction Force Sensitivity
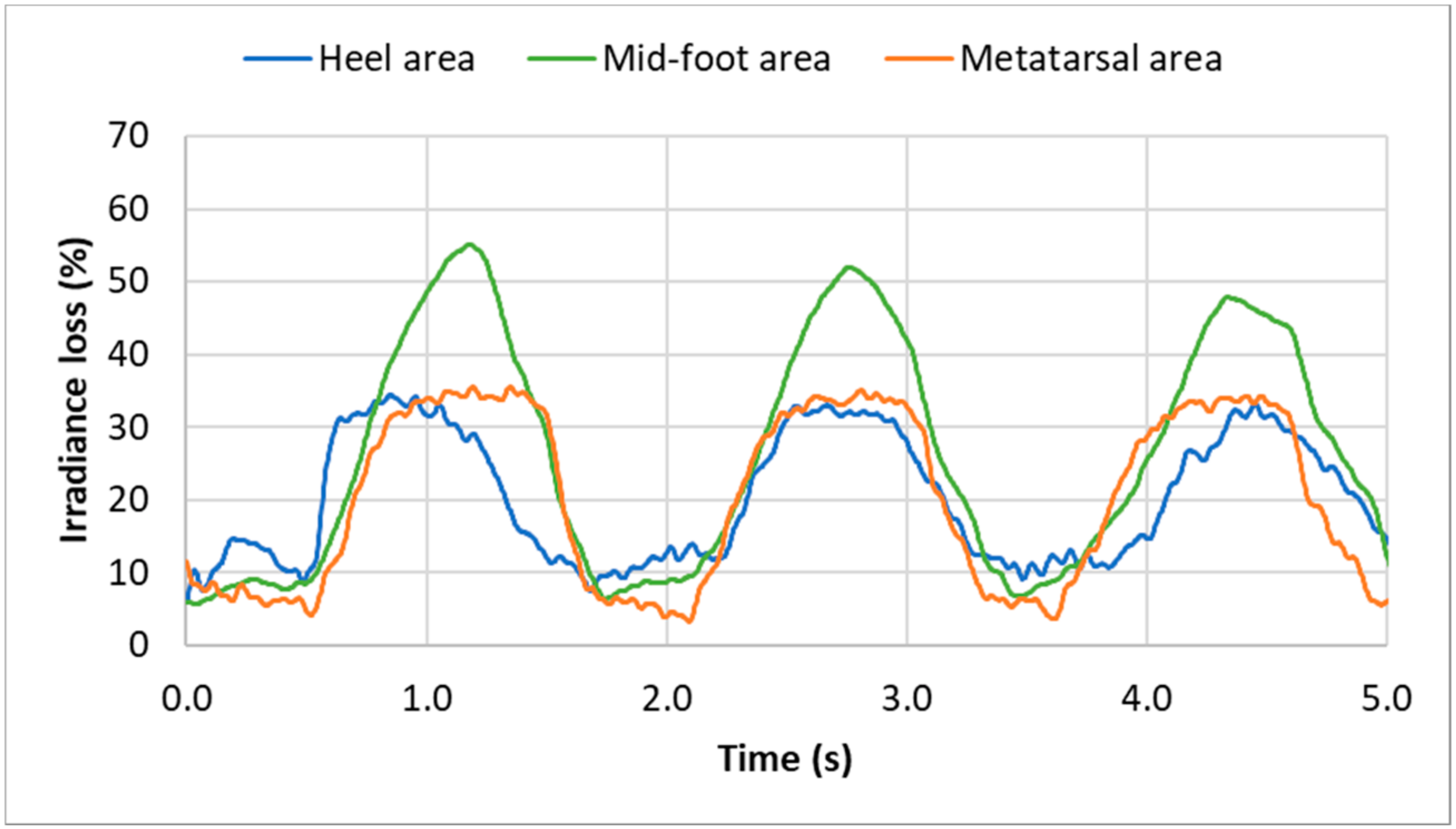
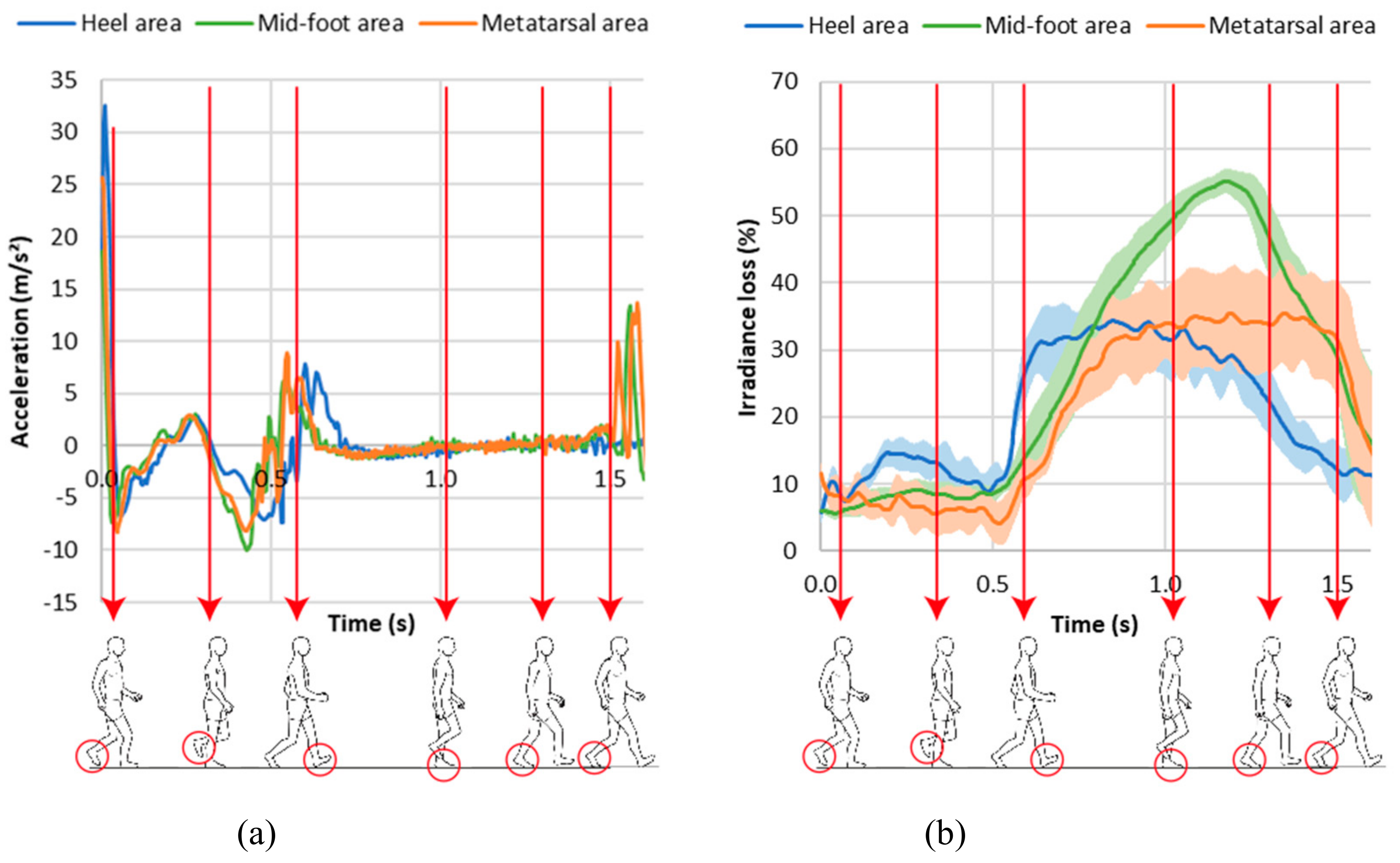
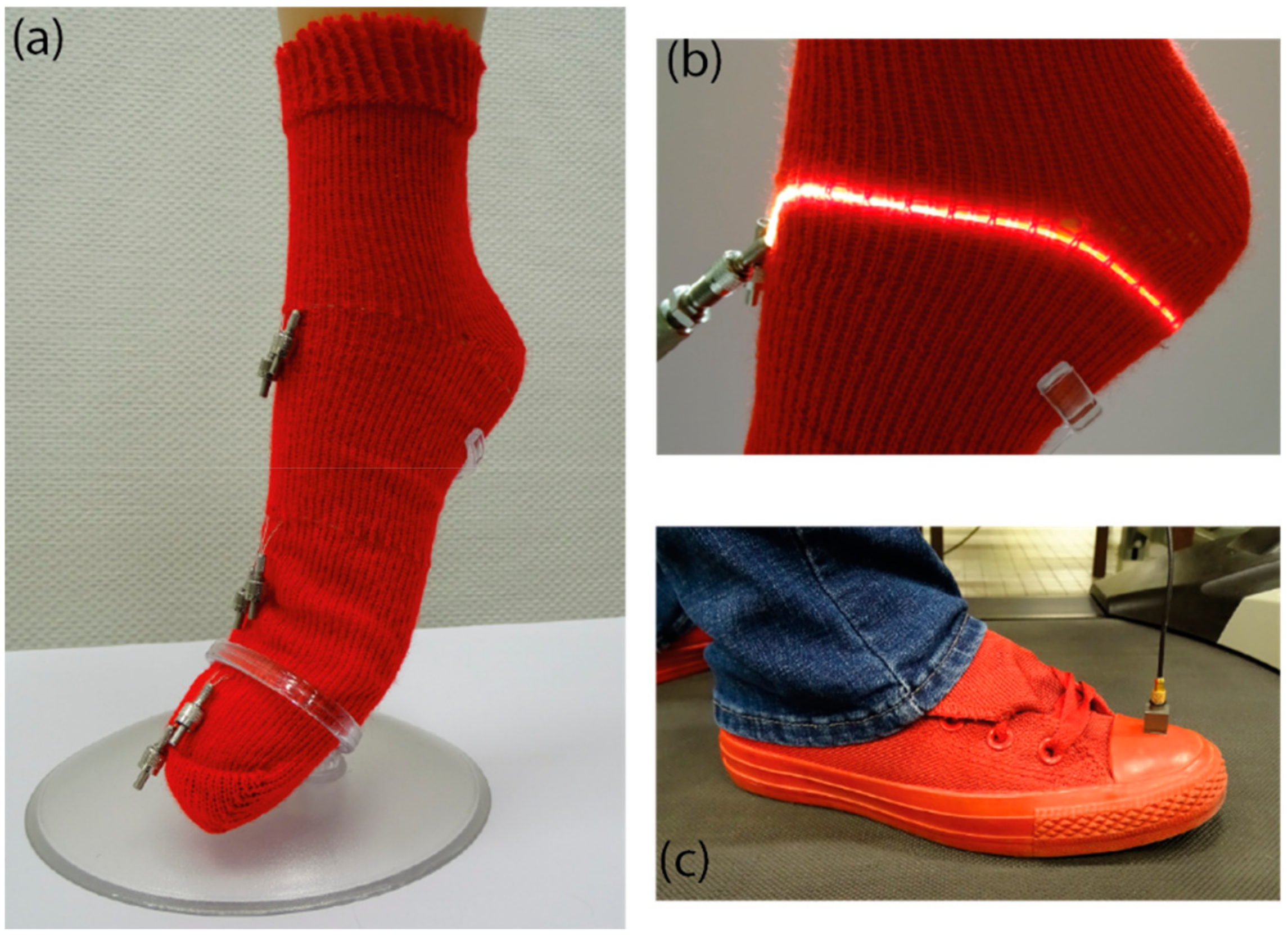
4. Proof-of-Concept of the e-Knitted Textile with POF for Walking Monitoring
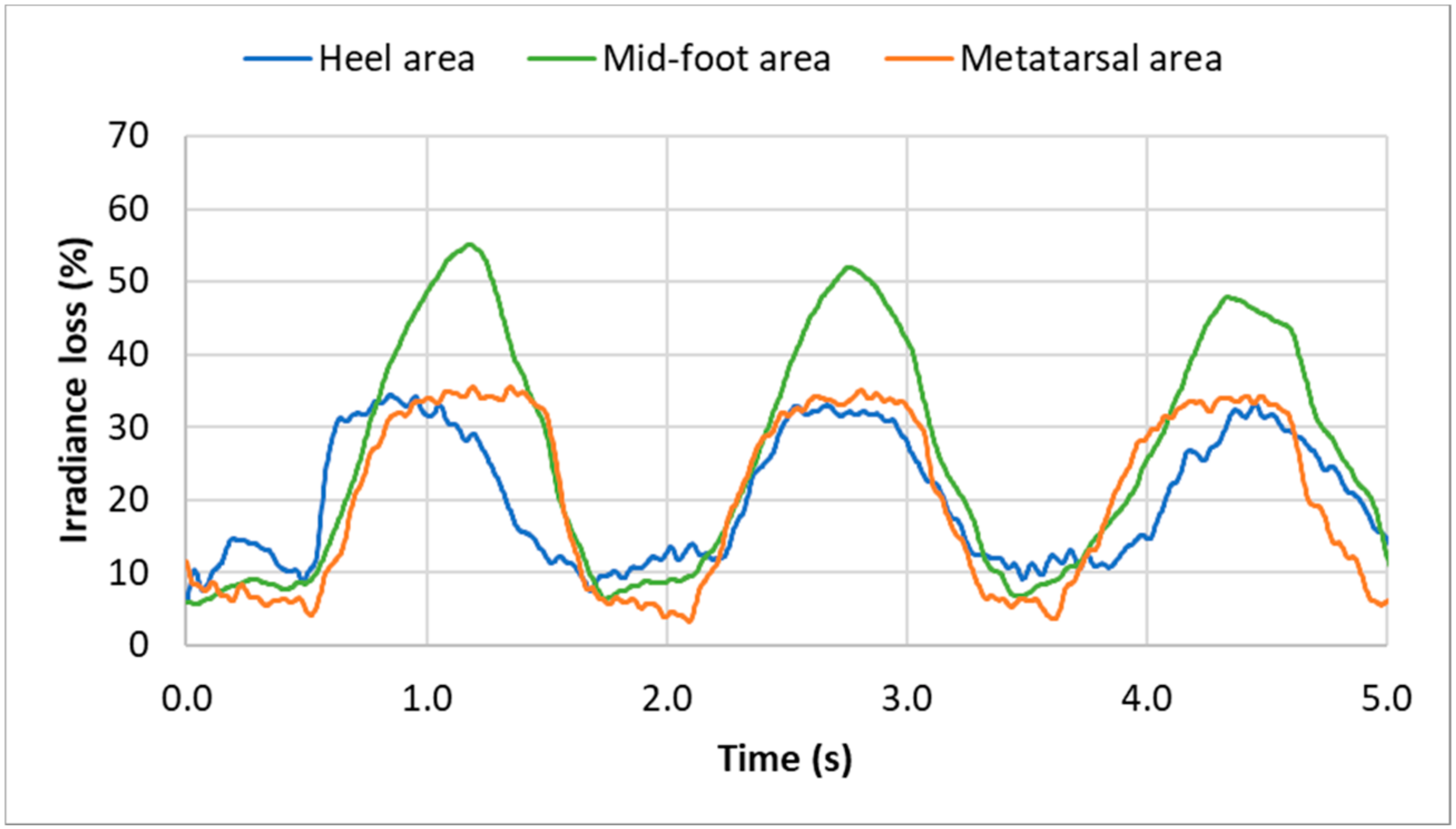
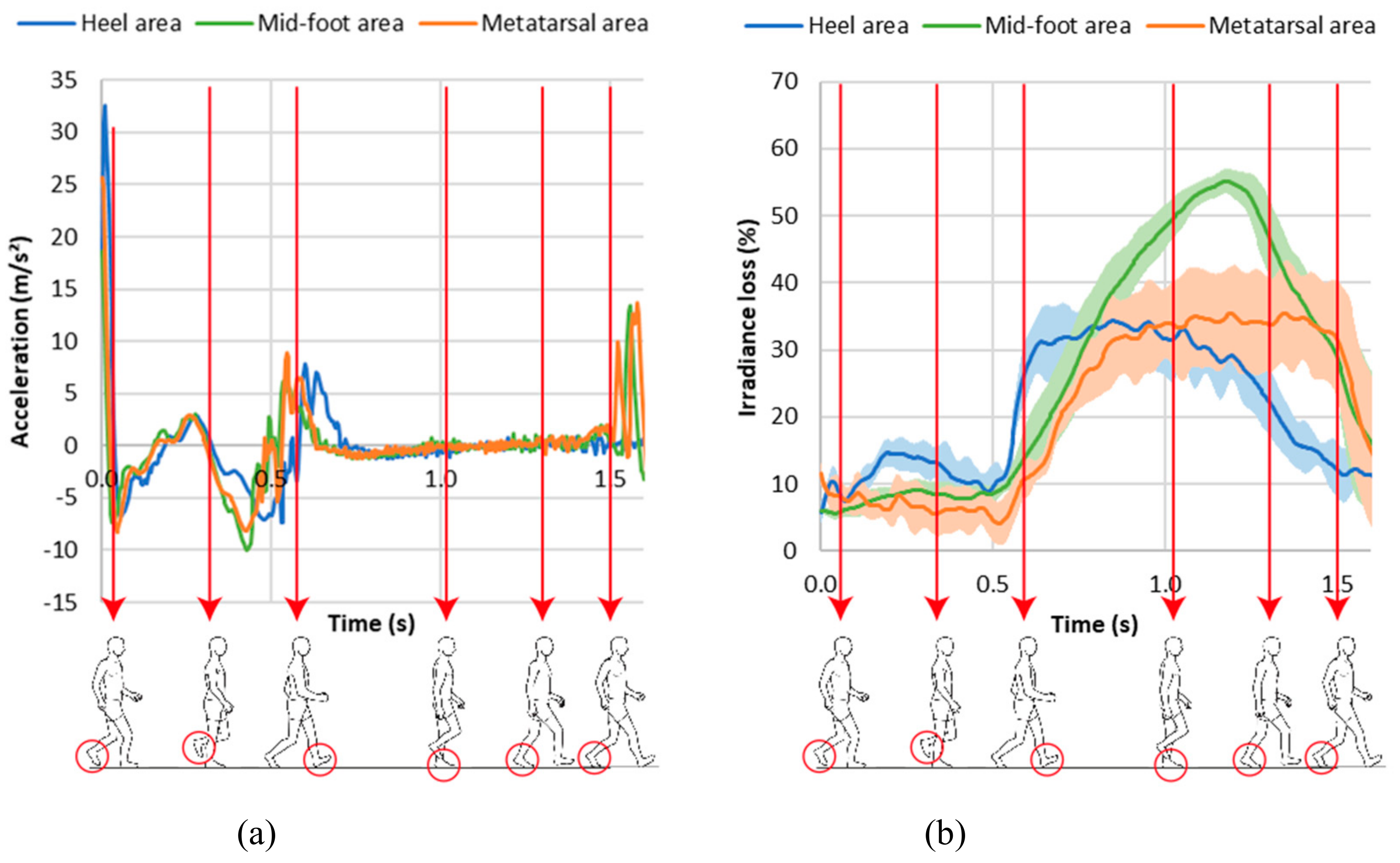
- In the mid-foot area, the real contact area is small, i.e. the external lateral area of the foot (isthmus),
- The change in the mid-foot cross-sectional shape induces a change in the global curvature of the POF. The mid-foot area is formed by softer tissues than the heel and metatarsal areas, and the sectional shape of the mid-foot changes during walking, which causes a change in the optical fibers leading to a modification of the light transmission.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Van Langenhove, L. Smart textiles: Past, present, and future. In Handbook of Smart Textiles; Tao, X., Ed.; Springer Singapore: Singapore, 2015; pp. 1035–1058. [Google Scholar]
- Bremer, K.; Weigand, F.; Zheng, Y.; Alwis, L.S.; Helbig, R.; Roth, B. Structural health monitoring using textile reinforcement structures with integrated optical fiber sensors. Sensors 2017, 17, 345. [Google Scholar] [CrossRef] [PubMed]
- Haroglu, D.; Powell, N.; Seyam, A.-F.M. A textile- based optical fiber sensor design for automotive seat occupancy sensing. J. Text. Inst. 2017, 108, 49–57. [Google Scholar] [CrossRef]
- Haroglu, D.; Powell, N.; Seyam, A.-F.M. The response of polymer optical fiber (POF) to bending and axial tension for the application of a POF sensor for automotive seat occupancy sensing. J. Text. Inst. 2017, 108, 132–139. [Google Scholar] [CrossRef]
- Haroglu, D.; Powell, N.; Seyam, A.-F.M. The response of polymer optical fiber (POF) to cyclic loading for the application of a POF sensor for automotive seat occupancy sensing. J. Text. Inst. 2017, 108, 42–48. [Google Scholar] [CrossRef]
- Totaro, M.; Poliero, T.; Mondini, A.; Lucarotti, C.; Cairoli, G.; Ortiz, J.; Beccai, L. Soft smart garments for lower limb joint position analysis. Sensors 2017, 17, 2314. [Google Scholar] [CrossRef] [PubMed]
- Tognetti, A.; Bartalesi, R.; Lorussi, F.; De Rossi, D. Body segment position reconstruction and posture classification by smart textiles. Trans. Inst. Meas. Control 2007, 29, 215–253. [Google Scholar] [CrossRef]
- Mukhopadhyay, S.C. Wearable sensors for human activity monitoring: A review. IEEE Sens. J. 2015, 15, 1321–1330. [Google Scholar] [CrossRef]
- Nag, A.; Mukhopadhyay, S.C.; Kosel, J. Wearable flexible sensors: A review. IEEE Sens. J. 2017, 17, 3949–3960. [Google Scholar] [CrossRef]
- Mattmann, C.; Clemens, F.; Tröster, G. Sensor for measuring strain in textile. Sensors 2008, 8, 3719–3732. [Google Scholar] [CrossRef] [PubMed]
- Åkerfeldt, M.; Lund, A.; Walkenström, P. Textile sensing glove with piezoelectric PVDF fibers and printed electrodes of PEDOT: PSS. Text. Res. J. 2015, 85, 1789–1799. [Google Scholar] [CrossRef]
- Bashir, T.; Ali, M.; Persson, N.-K.; Ramamoorthy, S.K.; Skrifvars, M. Stretch sensing properties of conductive knitted structures of PEDOT-coated viscose and polyester yarns. Text. Res. J. 2014, 84, 323–334. [Google Scholar] [CrossRef]
- Guo, L.; Berglin, L.; Wiklund, U.; Mattila, H. Design of a garment-based sensing system for breathing monitoring. Text. Res. J. 2013, 83, 499–509. [Google Scholar] [CrossRef]
- Mokhlespour Esfahani, M.I.; Taghinezhad, S.; Mottaghitalab, V.; Narimani, R.; Parnianpour, M. Novel printed body worn sensor for measuring the human movement orientation. Sens. Rev. 2016, 36, 321–331. [Google Scholar] [CrossRef]
- Preece, S.J.; Kenney, L.P.; Major, M.J.; Dias, T.; Lay, E.; Fernandes, B.T. Automatic identification of gait events using an instrumented sock. J. Neuroeng. Rehabil. 2011, 8, 32. [Google Scholar] [CrossRef] [PubMed]
- Tirosh, O.; Begg, R.; Passmore, E.; Knopp-Steinberg, N. Wearable textile sensor sock for gait analysis. In Proceedings of the 2013 Seventh International Conference on Sensing Technology (ICST), Wellington, New Zealand, 3–5 December 2013; pp. 618–622. [Google Scholar]
- Afzal, A.; Drean, J.-Y.; Harzallah, O.; Khenoussi, N.; Ahmad, S.; Akhtar, N.-A. Development of multifunctional different cross-sectional shaped coaxial composite filaments for SMART textile applications. Text. Res. J. 2017, 87, 1991–2004. [Google Scholar] [CrossRef]
- Martins, R.S.; Gonçalves, R.; Azevedo, T.; Rocha, J.G.; Nóbrega, J.M.; Carvalho, H.; Lanceros-Mendez, S. Piezoelectric coaxial filaments produced by coextrusion of poly(vinylidene fluoride) and electrically conductive inner and outer layers. J. Appl. Polym. Sci. 2014, 131. [Google Scholar] [CrossRef] [Green Version]
- Kechiche, M.B.; Bauer, F.; Harzallah, O.; Drean, J.Y. Development of piezoelectric coaxial filament sensors P(VDF-TrFE)/copper for textile structure instrumentation. Sens. Actuators A Phys. 2013, 204, 122–130. [Google Scholar] [CrossRef]
- Selm, B.; Rothmaier, M.; Camenzind, M.; Khan, T.; Walt, H. Novel flexible light diffuser and irradiation properties for photodynamic therapy. J. Biomed. Opt. 2007, 12, 034024. [Google Scholar] [CrossRef]
- Selm, B.; Gürel, E.A.; Rothmaier, M.; Rossi, R.M.; Scherer, L.J. Polymeric Optical Fiber Fabrics for Illumination and Sensorial Applications in Textiles. J. Intell. Mater. Syst. Struct. 2010, 21, 1061–1071. [Google Scholar] [CrossRef]
- Yang, J.-H.; Cho, H.-S.; Lee, J.H. An analysis on the luminance efficiency of the machine embroidery method applied to flexible plastic optical fiber for realization of the textile display. Text. Res. J. 2018, 88, 1466–1478. [Google Scholar] [CrossRef]
- Dunne, L.E.; Walsh, P.; Smyth, B.; Caulfield, B. Design and evaluation of a wearable optical sensor for monitoring seated spinal posture. In Proceedings of the 2006 10th IEEE International Symposium on Wearable Computers, Montreux, Switzerland, 11–14 October 2006; pp. 65–68. [Google Scholar]
- Leal-Junior, A.G.; Díaz, C.R.; Leitão, C.; Pontes, M.J.; Marques, C.; Frizera, A. Polymer optical fiber-based sensor for simultaneous measurement of breath and heart rate under dynamic movements. Opt. Laser Technol. 2019, 109, 429–436. [Google Scholar] [CrossRef]
- Krehel, M.; Schmid, M.; Rossi, R.M.; Boesel, L.F.; Bona, G.L.; Scherer, L.J. An optical fibre-based sensor for respiratory monitoring. Sensors 2014, 14, 13088–13101. [Google Scholar] [CrossRef] [PubMed]
- Grillet, A.; Kinet, D.; Witt, J.; Schukar, M.; Krebber, K.; Pirotte, F.; Depré, A. Optical fiber sensors embedded into medical textiles for healthcare monitoring. IEEE Sens. J. 2008, 8, 1215–1222. [Google Scholar] [CrossRef]
- Witt, J.; Narbonneau, F.; Schukar, M.; Krebber, K.; De Jonckheere, J.; Jeanne, M.; Kinet, M.; Paquet, B.; Depré, A.; D’Angelo, L.T.; et al. Medical textiles with embedded fiber optic sensors for monitoring of respiratory movement. IEEE Sens. J. 2012, 12, 246–254. [Google Scholar] [CrossRef]
- Zheng, W.; Tao, X.; Zhu, B.; Wang, G.; Hui, C. Fabrication and evaluation of a notched polymer optical fiber fabric strain sensor and its application in human respiration monitoring. Text. Res. J. 2014, 84, 1791–1802. [Google Scholar] [CrossRef]
- Witt, J.; Krebber, K.; Demuth, J.; Sasek, L. Fiber optic hearth rate sensor for integration into personal protective equipment. In Proceedings of the 2011 International Workshop on Biophotonics, Parma, Italy, 8–10 June 2011; pp. 1–3. [Google Scholar]
- Krehel, M.; Wolf, M.; Boesel, L.F.; Rossi, R.M.; Bona, G.L.; Scherer, L.J. Development of a luminous textile for reflective pulse oximetry measurements. Biomed. Opt. Exp. 2014, 5, 2537–2547. [Google Scholar] [CrossRef] [Green Version]
- Meyer, J.; Lukowicz, P.; Tröster, G. Textile pressure sensor for muscle activity and motion detection. In Proceedings of the 2006 10th IEEE International Symposium on Wearable Computers, Montreux, Switzerland, 11–14 October 2006; pp. 69–72. [Google Scholar]
- Rothmaier, M.; Luong, M.P.; Clemens, F. Textile pressure sensor made of flexible plastic optical fibers. Sensors 2008, 8, 4318–4329. [Google Scholar] [CrossRef]
- Sartiano, D.; Sales, S. Low cost plastic optical fiber pressure sensor embedded in mattress for vital signal monitoring. Sensors 2017, 17, 2900. [Google Scholar] [CrossRef]
- Krebber, K.; Lenke, P.; Liehr, S.; Witt, J.; Schukar, M. Smart technical textiles with integrated POF sensors. In Proceedings of the Smart Sensor Phenomena, Technology, Networks, and Systems, San Diego, CA, USA, 7 April 2008. [Google Scholar]
- Zeng, W. Polymer optical fiber for smart textiles. In Handbook of Smart Textiles; Tao, X., Ed.; Springer Singapore: Singapore, 2015; pp. 109–125. [Google Scholar]
- Quandt, B.M.; Pfister, M.S.; Lubben, J.F.; Spano, F.; Rossi, R.M.; Bona, G.L.; Boesel, L.F. POF-yarn weaves: controlling the light out-coupling of wearable phototherapy devices. Biomed. Opt. Exp. 2017, 8, 4316–4330. [Google Scholar] [CrossRef] [Green Version]
- Peterson, J.; Sandvik, F. Flat knitting of optical fibres. In Proceedings of the AUTEX 2009 World Textile Conference, İzmir, Turkey, 26–28 May 2009. [Google Scholar]
- Oscarsson, L.; Jacobsen Heimdal, E.; Lundell, T.; Peterson, J. Flat knitting of a light emitting textile with optical fibres. Autex Res. J. 2009, 9, 61–65. [Google Scholar]
- International Diabetes Federation. Diabetes Atlas, 8th ed.; International Diabetes Federation: Brussels, Belgium, 2017; ISBN 978-2-930229-87-4. [Google Scholar]
- Boulton, A.J.M. Pressure and the diabetic foot: Clinical science and offloading techniques. Am. J. Surg. 2004, 187, S17–S24. [Google Scholar] [CrossRef]
- Bus, S.A.; van Deursen, R.W.; Armstrong, D.G.; Lewis, J.E.; Caravaggi, C.F.; Cavanagh, P.R.; International Working Group on the Diabetic Foot. Footwear and offloading interventions to prevent and heal foot ulcers and reduce plantar pressure in patients with diabetes: A systematic review. Diabetes Metab. Res. Rev. 2016, 32 (Suppl. 1), 99–118. [Google Scholar] [CrossRef] [PubMed]
- Cavanagh, P.R.; Bus, S.A. Off-loading the diabetic foot for ulcer prevention and healing. J. Vasc. Surg. 2010, 52, 37S–43S. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Halawa, M.R.; Eid, Y.M.; El-Hilaly, R.A.; Abdelsalam, M.M.; Amer, A.H. Relationship of planter pressure and glycemic control in type 2 diabetic patients with and without neuropathy. Diabetes Metab. Syndrome 2018, 12, 99–104. [Google Scholar] [CrossRef] [PubMed]
- Leal Junior, A.G.; Frizera, A.; Avellar, L.M.; Marques, C.; Pontes, M.J. Polymer optical fiber for in-shoe monitoring of ground reaction forces during the gait. IEEE Sens. J. 2018, 18, 2362–2368. [Google Scholar] [CrossRef]
- Domingues, M.F.; Tavares, C.; Leitao, C.; Frizera-Neto, A.; Alberto, N.; Marques, C.; Radwan, A.; Rodriguez, J.; Postolache, O.; Rocon, E.; et al. Insole optical fiber Bragg grating sensors network for dynamic vertical force monitoring. J. Biomed. Opt. 2017, 22, 91507. [Google Scholar] [CrossRef]
- Vilarinho, D.; Theodosiou, A.; Domingues, M.F.; Antunes, P.; Kalli, K.; André, P.; Marques, C.A.F. Foot plantar pressure monitoring with CYTOP Bragg Gratings sensing system. In Proceedings of the 11th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2018), Funchal, Portugal, 19–21 January 2018; Volume 1, pp. 25–29. [Google Scholar] [CrossRef]
- Najafi, B.; Mohseni, H.; Grewal, G.S.; Talal, T.K.; Menzies, R.A.; Armstrong, D.G. An Optical-Fiber-Based Smart Textile (Smart Socks) to Manage Biomechanical Risk Factors Associated with Diabetic Foot Amputation. J. Diabetes Sci. Technol. 2017, 11, 668–677. [Google Scholar] [CrossRef]
- Rahemi, H.; Nguyen, H.; Lee, H.; Najafi, B. Toward smart footwear to track frailty phenotypes—using propulsion performance to determine frailty. Sensors 2018, 18, 1763. [Google Scholar] [CrossRef]
- Perrier, A.; Vuillerme, N.; Luboz, V.; Bucki, M.; Cannard, F.; Diot, B.; Colin, D.; Rin, D.; Bourg, J.P.; Payan, Y. Smart diabetic socks: Embedded device for diabetic foot prevention. IRBM 2014, 35, 72–76. [Google Scholar] [CrossRef]
- Oks, A.; Katashev, A.; Zadinans, M.; Rancans, M.; Litvak, J. Development of smart sock system for gate analysis and foot pressure control. In Proceedings of the XIV Mediterranean Conference on Medical and Biological Engineering and Computing, Paphos, Cyprus, 31 March–2 April 2016; pp. 472–475. [Google Scholar]
- Eizentals, P.; Katashev, A.; Oks, A.; Pavare, Z.; Balcuna, D. Detection of excessive pronation and supination for walking and running gait with smart socks. In Proceedings of the World Congress on Medical Physics and Biomedical Engineering 2018, Singapore, 30 May 2018; pp. 603–607. [Google Scholar]
- Eizentals, P.; Katashev, A.; Oks, A. Gait analysis by using Smart Socks system. IOP Conf. Ser. Mater. Sci. Eng. 2018, 459, 012037. [Google Scholar] [CrossRef]
- Esposito, M.; Macagno, M.; Giancarlo Vigano, D. Sensors, Interfaces and Sensor Systems for Data Collection and Integrated Remote monitOring of Conditions at or Near Body Surfaces. U.S. Patent 8,925,392 B2, 6 January 2015. [Google Scholar]
- Lin, X.; Seet, B. A linear wide-range textile pressure sensor integrally embedded in regular fabric. IEEE Sens. J. 2015, 15, 5384–5385. [Google Scholar] [CrossRef]
- Lin, X.; Seet, B. Battery-free smart sock for abnormal relative plantar pressure monitoring. IEEE Trans. Biomed. Circ. Syst. 2017, 11, 464–473. [Google Scholar] [CrossRef] [PubMed]
- Von Lillienfeld-Toal, H.; Asfour, J.-M. Pressure Sensor. U.S. Patent 7 770 473 B2, 10 August 2010. [Google Scholar]
- Leong, J.; Parzer, P.; Perteneder, F.; Babic, T.; Rendl, C.; Vogl, A.; Egger, H.; Olwal, A.; Haller, M. proCover: Sensory augmentation of prosthetic limbs using smart textile covers. In Proceedings of the 29th Annual Symposium on User Interface Software and Technology, Tokyo, Japan, 16–19 October 2016; pp. 335–346. [Google Scholar]
- Ferreira, A.; Catarino, A.; Monteiro, J.; Rocha, A. Textile-based pressure sensors for step detection: a preliminary assessment. IOP Conf. Ser. Mater. Sci. Eng. 2018, 459, 1–6. [Google Scholar] [CrossRef]
- Cooke, W.D.; Kamal, M.S. Effect of Twist Factor on the Knitability of Combed Cotton Yarn. Text. Res. J. 1986, 56, 679–682. [Google Scholar] [CrossRef]
- Lau, K.W.; Dias, T. Knittability of High-modulus Yarns. J. Text. Inst. 1994, 85, 173–190. [Google Scholar] [CrossRef]
- Sasaki, T.; Kuroda, K. Evaluation and Measurement of Knittability. J. Text. Mach. Soc. Jpn. 1975, 21, 9–16. [Google Scholar] [CrossRef] [Green Version]
- Fong, N.R.; Berini, P.; Tait, R.N. Mechanical Properties of Thin Free-Standing CYTOP Membranes. J. Microelectromech. Syst. 2010, 19, 700–705. [Google Scholar] [CrossRef]
- Quandt, B.M.; Scherer, L.J.; Boesel, L.F.; Wolf, M.; Bona, G.L.; Rossi, R.M. Body-monitoring and health supervision by means of optical fiber-based sensing systems in medical textiles. Adv. Healthc. Mater. 2015, 4, 330–355. [Google Scholar] [CrossRef]
- Quandt, M. Optical Fibre Textiles in Non-Invasive Medical Applications. Ph.D. Thesis, ETH, Zurich, Switzerland, 2016. [Google Scholar]
- Derler, S.; Schrade, U.; Gerhardt, L.C. Tribology of human skin and mechanical skin equivalents in contact with textiles. Wear 2007, 263, 1112–1116. [Google Scholar] [CrossRef]
- Pabon-Carrasco, M.; Juarez-Jimenez, J.M.; Reina-Bueno, M.; Cohena-Jimenez, M. Behavior of provisional pressure-reducing materials in diabetic foot. J. Tissue Viabil. 2016, 25, 143–149. [Google Scholar] [CrossRef]
- Peyre, K.; Tourlonias, M.; Bueno, M.-A.; Spano, F.; Rossi, R.M. Tactile perception of textile surfaces from an artificial finger instrumented by a polymeric optical fibre. Tribol. Int. 2019, 130, 155–169. [Google Scholar] [CrossRef]
- Obolenskiy, V.N.; Protsko, V.G.; Komelyagina, E.Y. Classification of diabetic foot, revisited. Wound Med. 2017, 18, 1–7. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optical Fiber Type | Young’s Modulus (GPa) | Bending Rigidity (10−9 N·m2) |
|---|---|---|
| GigaPOF 50SR | 2.1 ± 0.1 | 44 ± 3 |
| Bi-component POF* | 4.7 ± 0.4 | 96 ± 18 |
| Geniomer® POF* | 0.10 ± 0.02 | 2.0 ± 0.4 |
| Knitted Structure | Normal Force During Compression Test (N) | Normal Force During Friction Test (N) | Tangential Force During Friction Test (N) |
|---|---|---|---|
| Single jersey | |||
| 1 × 1 rib | |||
| 1 × 1 interlock |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guignier, C.; Camillieri, B.; Schmid, M.; Rossi, R.M.; Bueno, M.-A. E-Knitted Textile with Polymer Optical Fibers for Friction and Pressure Monitoring in Socks. Sensors 2019, 19, 3011. https://doi.org/10.3390/s19133011
Guignier C, Camillieri B, Schmid M, Rossi RM, Bueno M-A. E-Knitted Textile with Polymer Optical Fibers for Friction and Pressure Monitoring in Socks. Sensors. 2019; 19(13):3011. https://doi.org/10.3390/s19133011
Chicago/Turabian StyleGuignier, Claire, Brigitte Camillieri, Michel Schmid, René M. Rossi, and Marie-Ange Bueno. 2019. "E-Knitted Textile with Polymer Optical Fibers for Friction and Pressure Monitoring in Socks" Sensors 19, no. 13: 3011. https://doi.org/10.3390/s19133011
APA StyleGuignier, C., Camillieri, B., Schmid, M., Rossi, R. M., & Bueno, M.-A. (2019). E-Knitted Textile with Polymer Optical Fibers for Friction and Pressure Monitoring in Socks. Sensors, 19(13), 3011. https://doi.org/10.3390/s19133011