Locating Ultrasonic Signals Employing MEMS-On-Fiber Sensors

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experimental Preparation
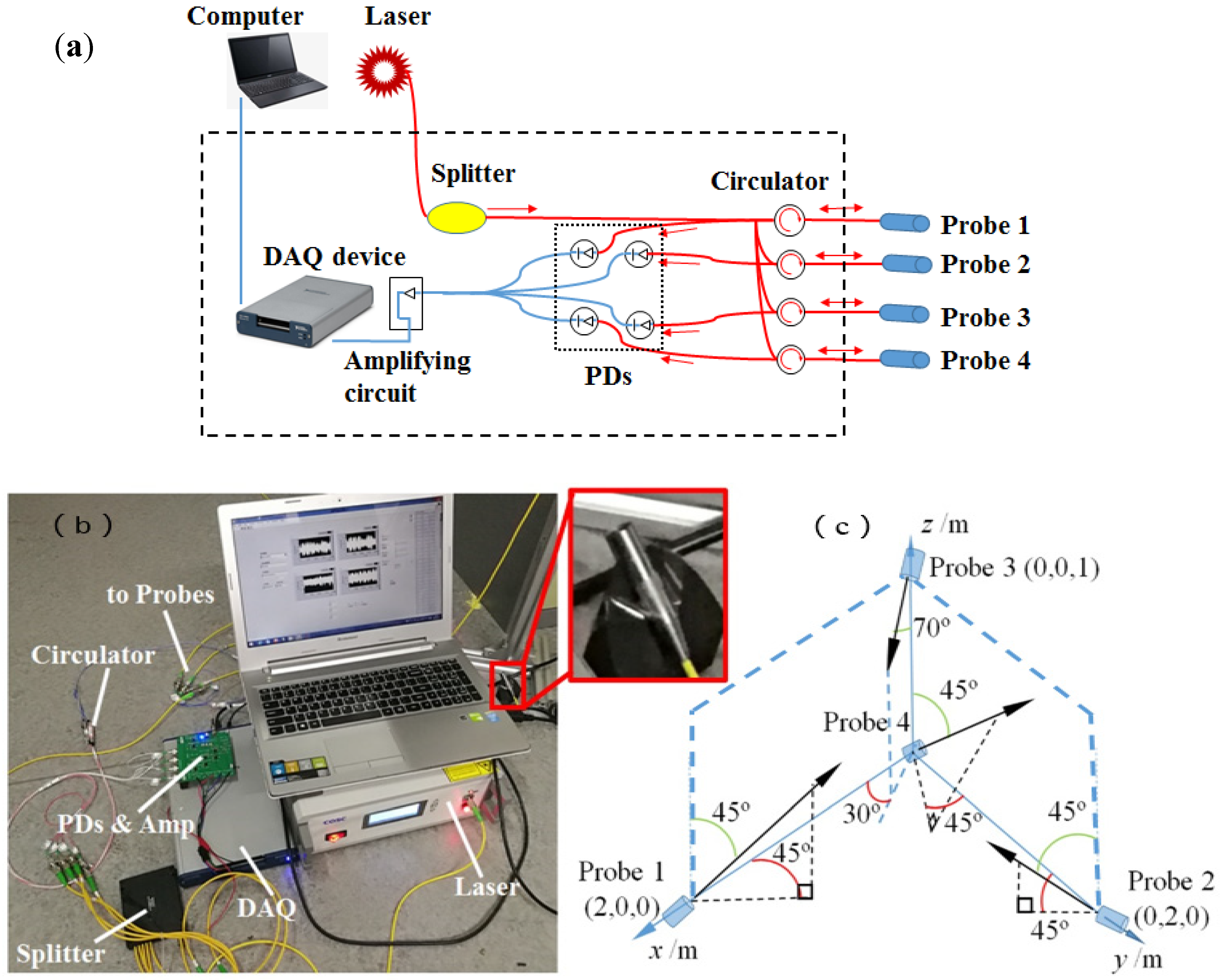
2.1. Hardware System
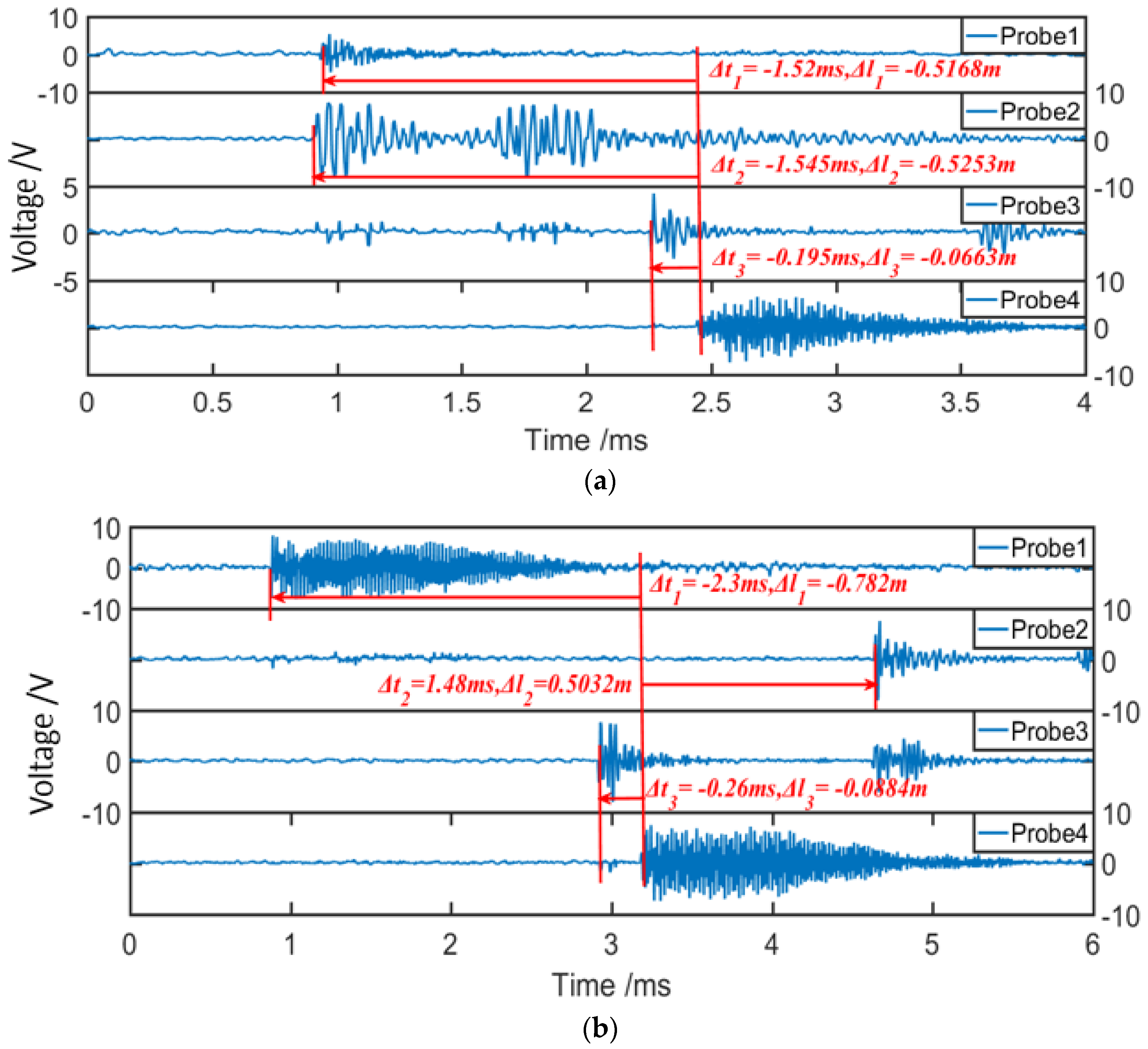
2.2. Time Difference of Arrival (TDOA) Method
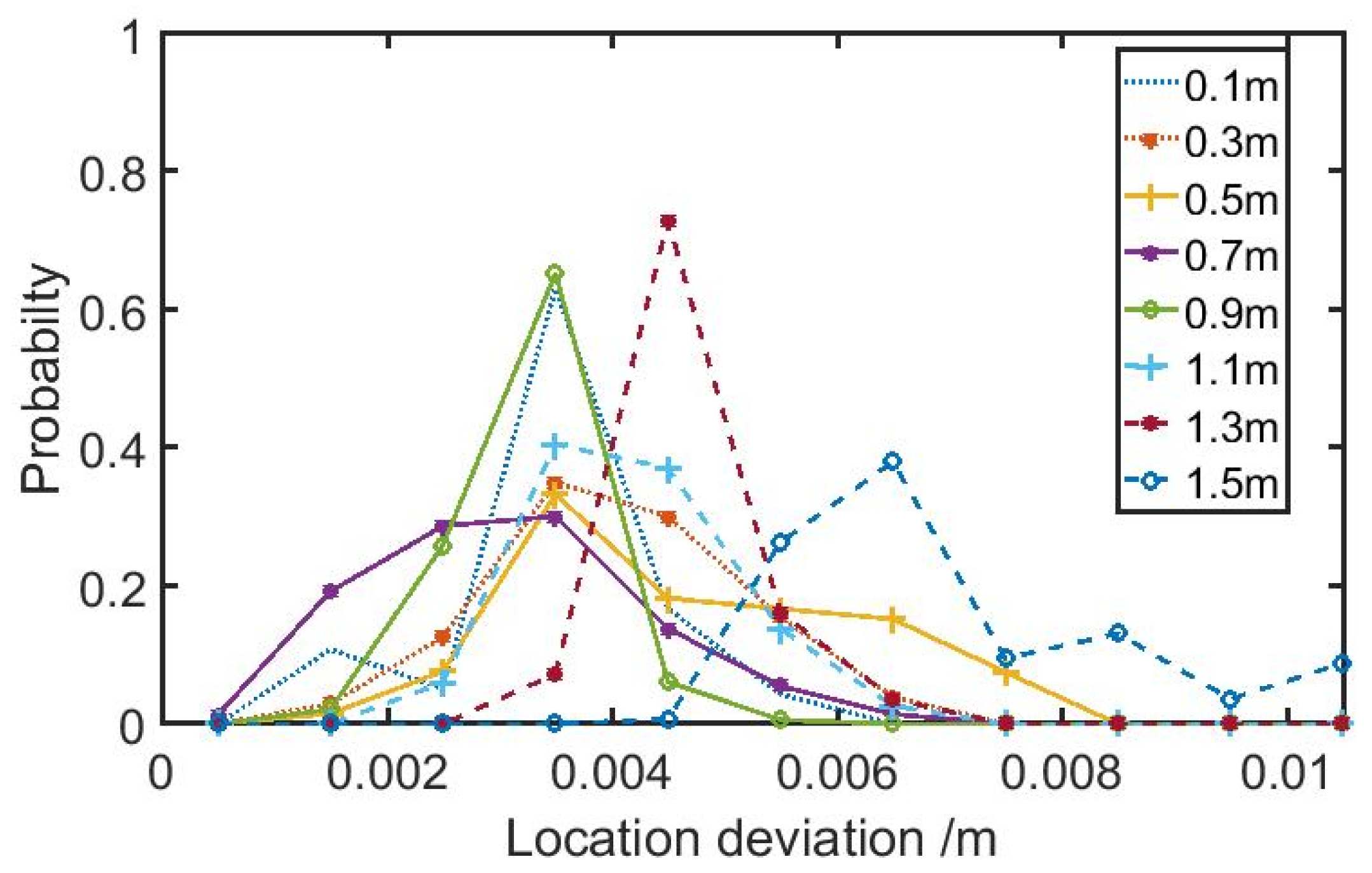
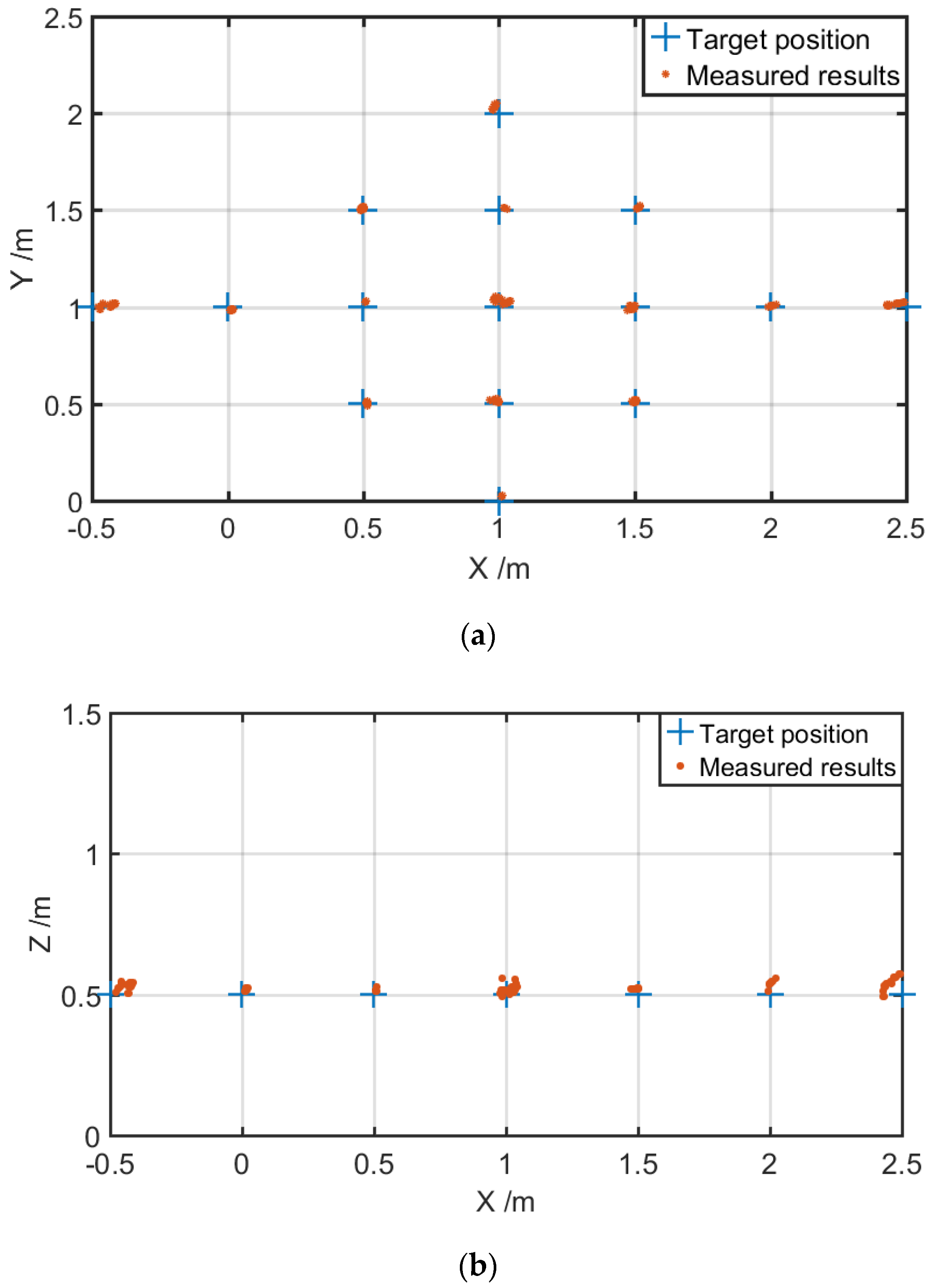
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xu, J.H.; Zhang, X.L.; Fernando, S.N.; Chai, K.T.; Gu, Y.D. AlN-on-SOI platform-based micro-machined hydrophone. Appl. Phys. Lett. 2016, 109, 032902. [Google Scholar] [CrossRef]
- Arlotto, P.; Grimaldi, M.; Naeck, R.; Ginoux, J.-M. An ultrasonic contactless sensor for breathing monitoring. Sensors 2014, 14, 15371–15386. [Google Scholar] [CrossRef] [PubMed]
- Wu, Q.; Okabe, Y.; Yu, F.M. Ultrasonic structural health monitoring using fiber Bragg grating. Sensors 2018, 18, 3395. [Google Scholar] [CrossRef] [PubMed]
- Qi, J.; Liu, G.-P. A robust high-accuracy ultrasound indoor positioning system based on a wireless sensor network. Sensors 2017, 17, 2554. [Google Scholar] [CrossRef] [PubMed]
- Han, P.; Pang, S.L.; Fan, J.B.; Shen, X.Q.; Pan, T.Z. Highly enhanced piezoelectric properties of PLZT/PVDF composite by tailoring the ceramic Curie temperature, particle size and volume fraction. Sens. Actuators A Phys. 2013, 204, 74–78. [Google Scholar] [CrossRef]
- Tang, H.X.; Malakooti, M.H.; Sodano, H.A. Relationship between orientation factor of lead zirconate titanate nanowires and dielectric permittivity of nanocomposites. Appl. Phys. Lett. 2013, 103, 222901. [Google Scholar] [CrossRef]
- O’Reilly, M.A.; Hynynen, K. A PVDF receiver for ultrasound monitoring of transcranial focused ultrasound therapy. IEEE Trans. Biomed. Eng. 2010, 57, 2286–2294. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.W.; Tao, J.; Huang, X.G. Research progress on F-P interference—based fiber-optic sensors. Sensors 2016, 16, 1424. [Google Scholar] [CrossRef] [PubMed]
- Islam, M.R.; Ali, M.M.; Lai, M.H.; Lim, K.S.; Ahmad, H. Chronology of Fabry-Pérot interferometer fiber-optic sensors and their applications: A review. Sensors 2014, 14, 7451–7488. [Google Scholar] [CrossRef] [PubMed]
- Pang, C.; Bae, H.; Gupta, A.; Bryden, K.; Yu, M. MEMS Fabry-Pérot sensor interrogated by optical system-on-a-chip for simultaneous pressure and temperature sensing. Opt. Express 2013, 21, 21829. [Google Scholar] [CrossRef] [PubMed]
- Wang, F.; Shao, Z.; Xie, J.; Hu, Z.; Luo, H.; Hu, Y. Extrinsic Fabry-Pérot underwater acoustic sensor based on micromachined center-embossed diaphragm. J. Lightwave Technol. 2014, 32, 4628–4636. [Google Scholar] [CrossRef]
- Li, M.; Wang, M.; Li, H. Optical MEMS pressure sensor based on fabry-pérot interferometry. Opt. Express 2006, 14, 1497–1540. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Ni, X.; Wang, M.; Cui, Y.; Shi, Q. Demodulation of an optical fiber MEMS pressure sensor based on single bandpass microwave photonic filter. Opt. Express 2017, 25, 644–653. [Google Scholar] [CrossRef] [PubMed]
- Fu, C.; Si, W.; Li, H.; Li, D.; Yuan, P.; Yu, Y. A novel high-performance beam-supported membrane structure with enhanced design flexibility for partial discharge detection. Sensors 2017, 17, 593. [Google Scholar] [CrossRef] [PubMed]
- Si, W.; Fu, C.; Li, D.; Li, H.; Yuan, P.; Yu, Y. Directional sensitivity of a MEMS-based fiber-optic extrinsic Fabry-Perot ultrasonic sensor for partial discharge detection. Sensors 2018, 18, 1975. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Li, D.; Xiong, C.; Si, W.; Fu, C.; Yuan, P.; Yu, Y. Low-cost, high-performance fiber optic Fabry-Perot sensor for ultrasonic wave detection. Sensors 2019, 19, 406. [Google Scholar] [CrossRef] [PubMed]


© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Si, W.; Fu, C.; Li, H.; Lv, J.; Xiong, C.; Yuan, P.; Yu, Y. Locating Ultrasonic Signals Employing MEMS-On-Fiber Sensors. Sensors 2019, 19, 3696. https://doi.org/10.3390/s19173696
Si W, Fu C, Li H, Lv J, Xiong C, Yuan P, Yu Y. Locating Ultrasonic Signals Employing MEMS-On-Fiber Sensors. Sensors. 2019; 19(17):3696. https://doi.org/10.3390/s19173696
Chicago/Turabian StyleSi, Wenrong, Chenzhao Fu, Haoyong Li, Jiaming Lv, Chaoyu Xiong, Peng Yuan, and Yiting Yu. 2019. "Locating Ultrasonic Signals Employing MEMS-On-Fiber Sensors" Sensors 19, no. 17: 3696. https://doi.org/10.3390/s19173696