Pedestrian Positioning Using a Double-Stacked Particle Filter in Indoor Wireless Networks



Abstract
:1. Introduction
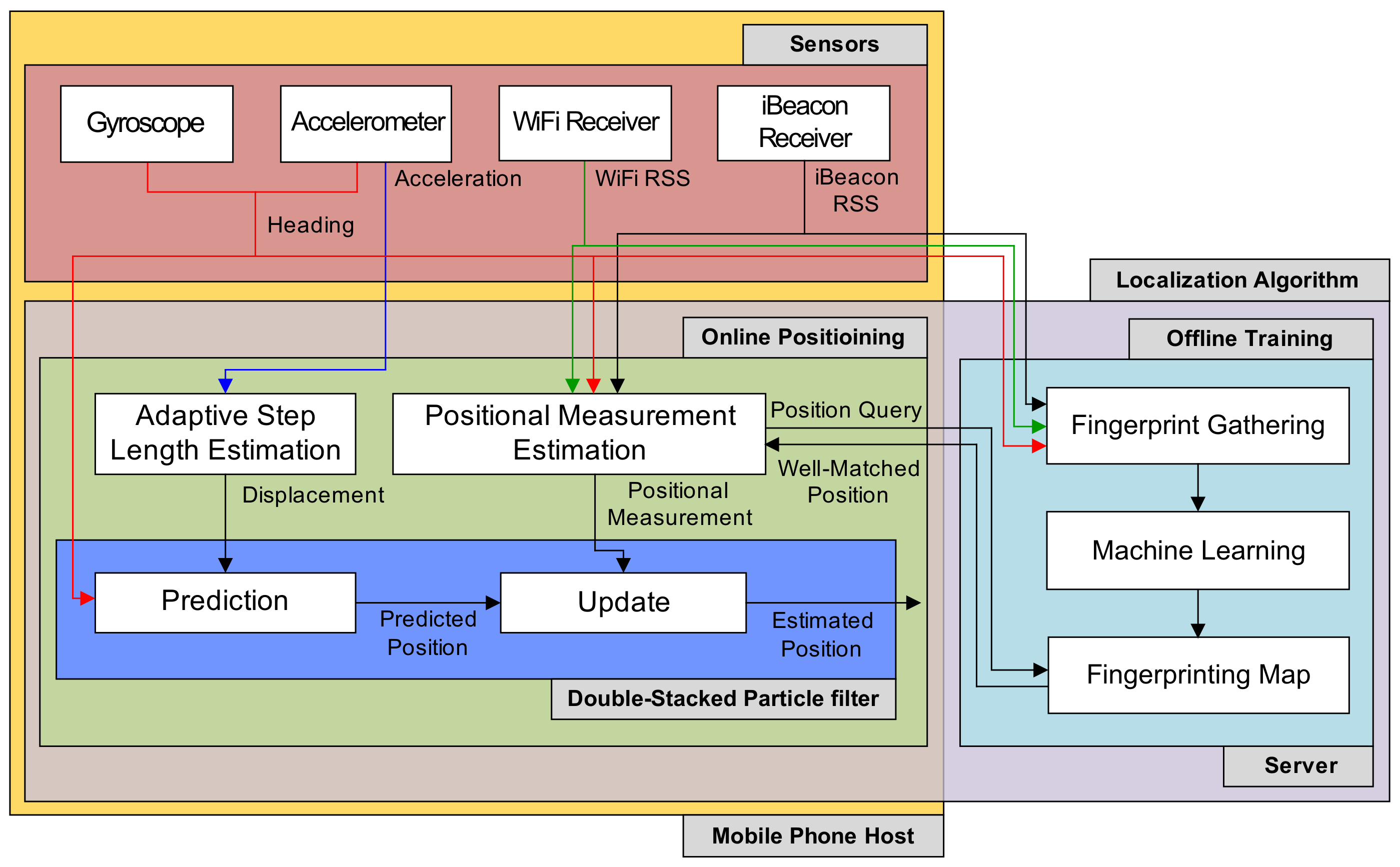
- We design a sample weighting method that calculates a weight for each particle through the likelihood function of positional measurements based on kernel density estimation. Similar to the SKPF [26], the enhanced PF scheme predicts the location of the user for every user step using the mobility sensing information determined by the gyroscope and accelerometer. Then, like SKPF, it also corrects the predicted position through the user’s positional observations obtained from the fingerprinting approach based on machine learning that uses WiFi and iBeacon RSS values as location features. The SKPF evaluates the weight of particles obtained from the deterministic sampling of the UKF through the likelihood function based on parametric technique (e.g., Gaussian function) as in general PF, such as sequential importance resampling (SIR) filter [18]. On the contrary, the enhanced PF computes the weight of particles drawn by the importance sampling [27] through the likelihood function calculated by Gaussian kernel density estimation (i.e., Parzen-window method) among nonparametric techniques [28].
- For the enhanced PF, the likelihood of positional measurements is represented by the target distribution, which is generated based on point mass representations using positional measurements obtained from the measured WiFi and iBeacon RSS values and pedestrian direction data using the fingerprinting algorithm. The RSS data received from WiFi and iBeacon APs permits the target distribution to reflect indoor wireless environments surrounding the user. Unlike the localization schemes [11,22,23,24,25,26] shown in Table 1 that calculate the weight of samples through the parametric density estimation, the particle weight in the enhanced PF is determined by calculating a probability density function of the target distribution using the Parzen-window density estimation for better positioning results.
- We propose a double-stacked particle filter (DSPF) as the improved PF. The DSPF estimates the location of the pedestrian using a separate particle presentation for both of the proposal and target distributions. Using the target distribution that reflects wireless circumstances surrounding the user through the multiple observations, the DSPF can conduct reliable position estimation in indoor wireless environments affected by considerable bias and errors. Also, the DSPF can perform accurate position estimations even with less particles due to the use of target distribution. Furthermore, the use of a small particle size guarantees a reduction in the computational cost and makes it possible for the DSPF to be applied to real-time localization applications.
- We have implemented the DSPF-based localization system on smartphones, and performed indoor positioning experiments in a campus bulling. Experimental results indicate that the DSPF can offer more accurate localization performance compared with the UKF and KF, and can achieve localization results that are as accurate as PF, while it provides better computational efficiency than PF.
2. System Configuration
3. Localization Algorithm
3.1. Step Length Estimation and Heading Determination
3.2. Inference of Positional Measurement
3.3. Pedestrian Model
3.4. Double-Stacked Particle Filter (DSPF)
3.4.1. Particle Filter
3.4.2. Double-Stacked Particle Filter for Pedestrian Localization
(1) Prediction
(2) Update
| Algorithm 1 Estimation of Target Distribution. |
|
3.4.3. DSPF-Based Positioning Algorithm
| Algorithm 2 DSPF-Based Positioning Algorithm. |
|
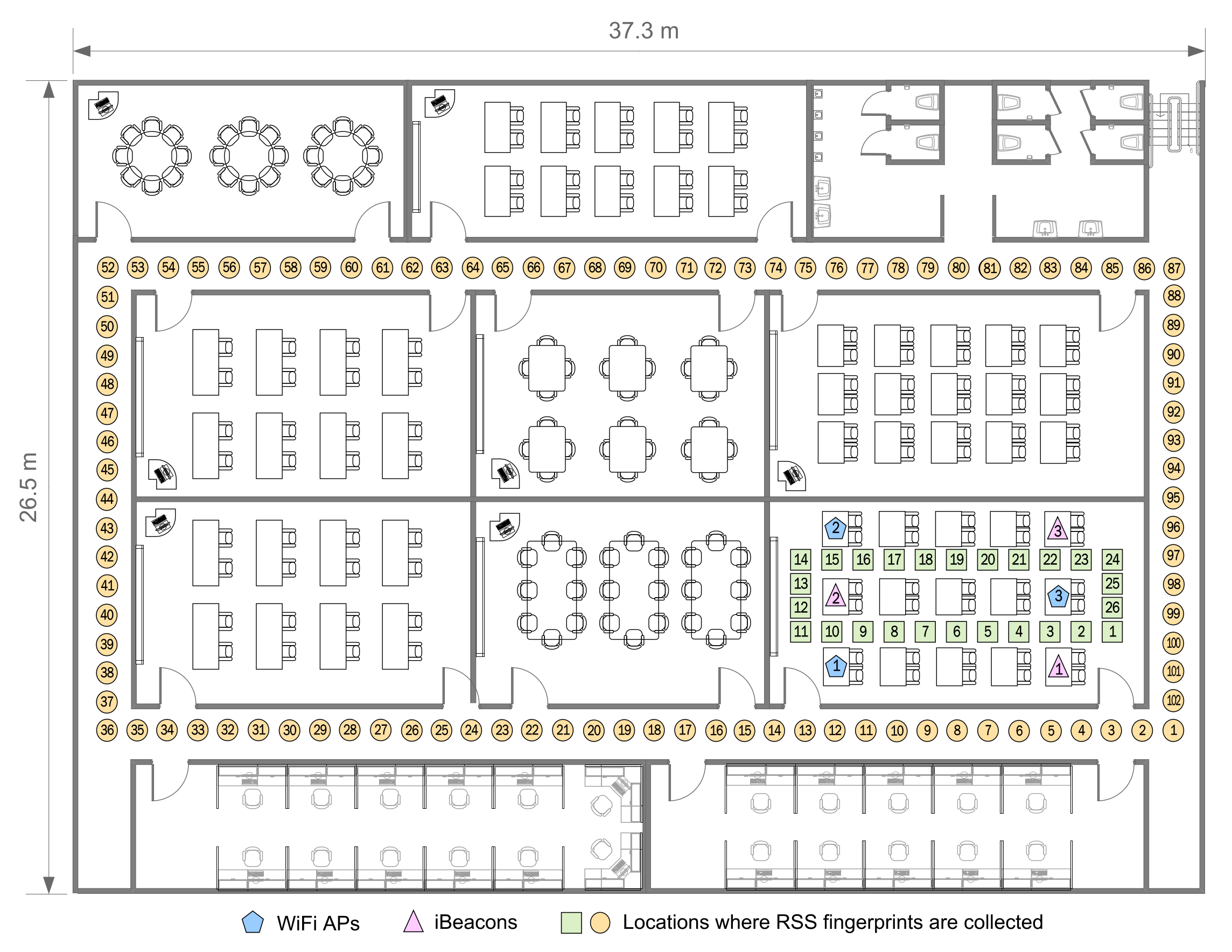
4. Experiment Setup
5. Indoor Localization Experiments
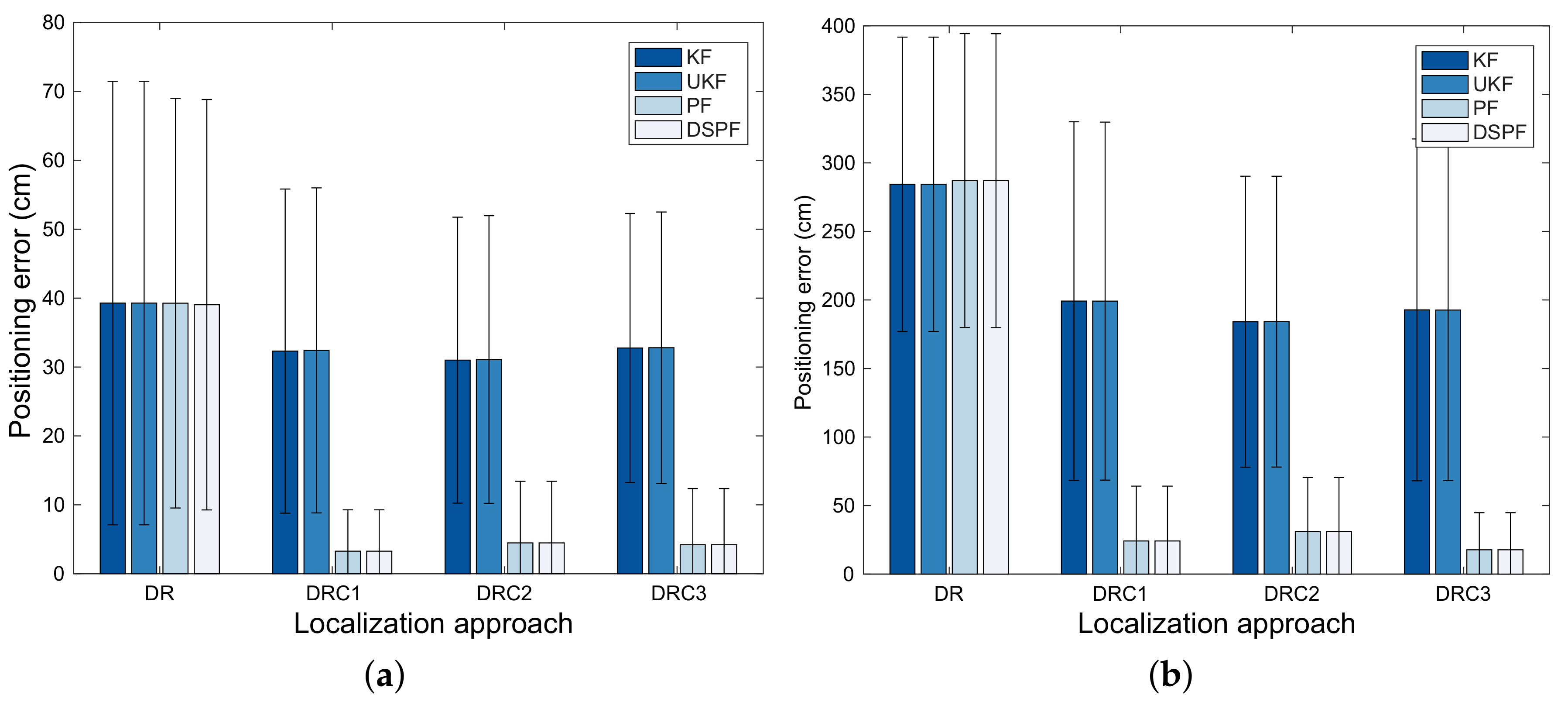
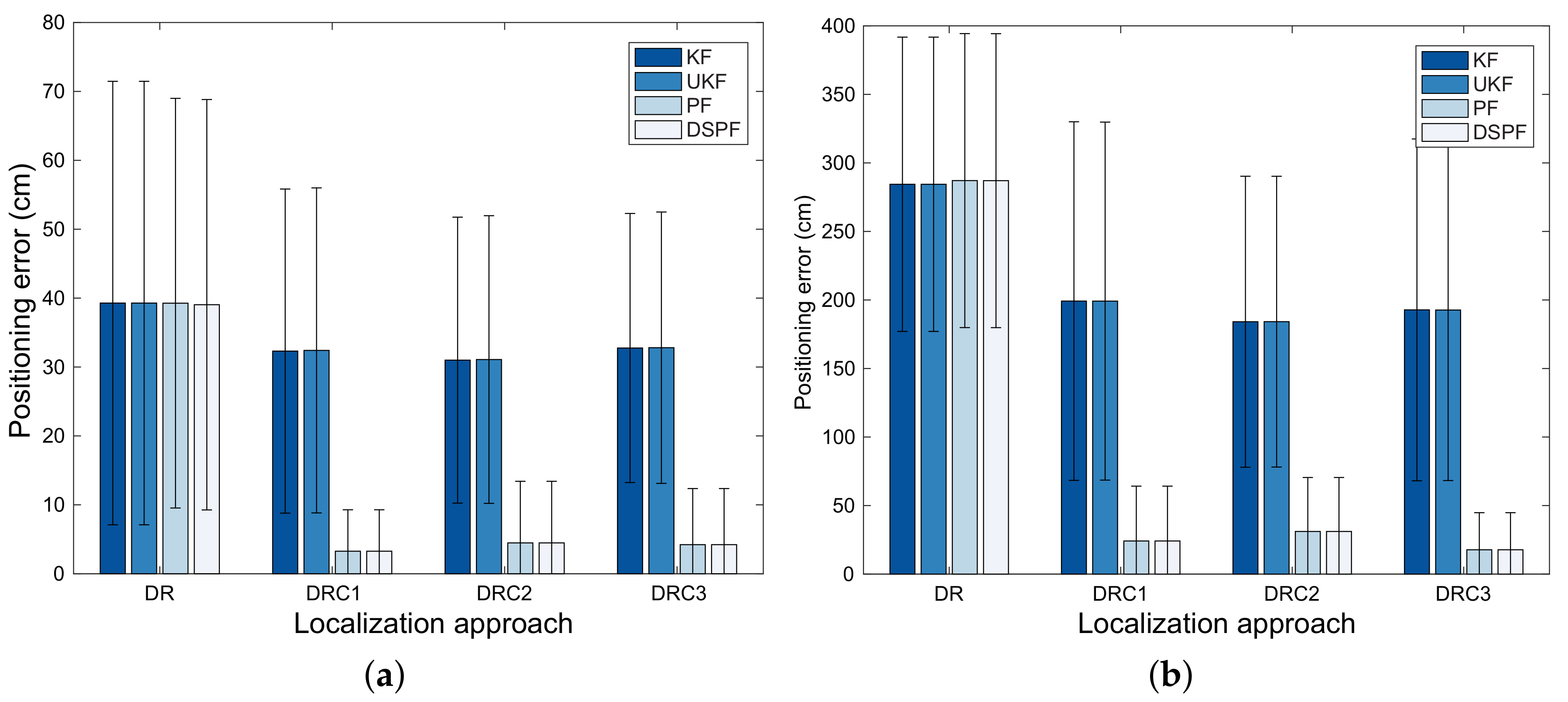
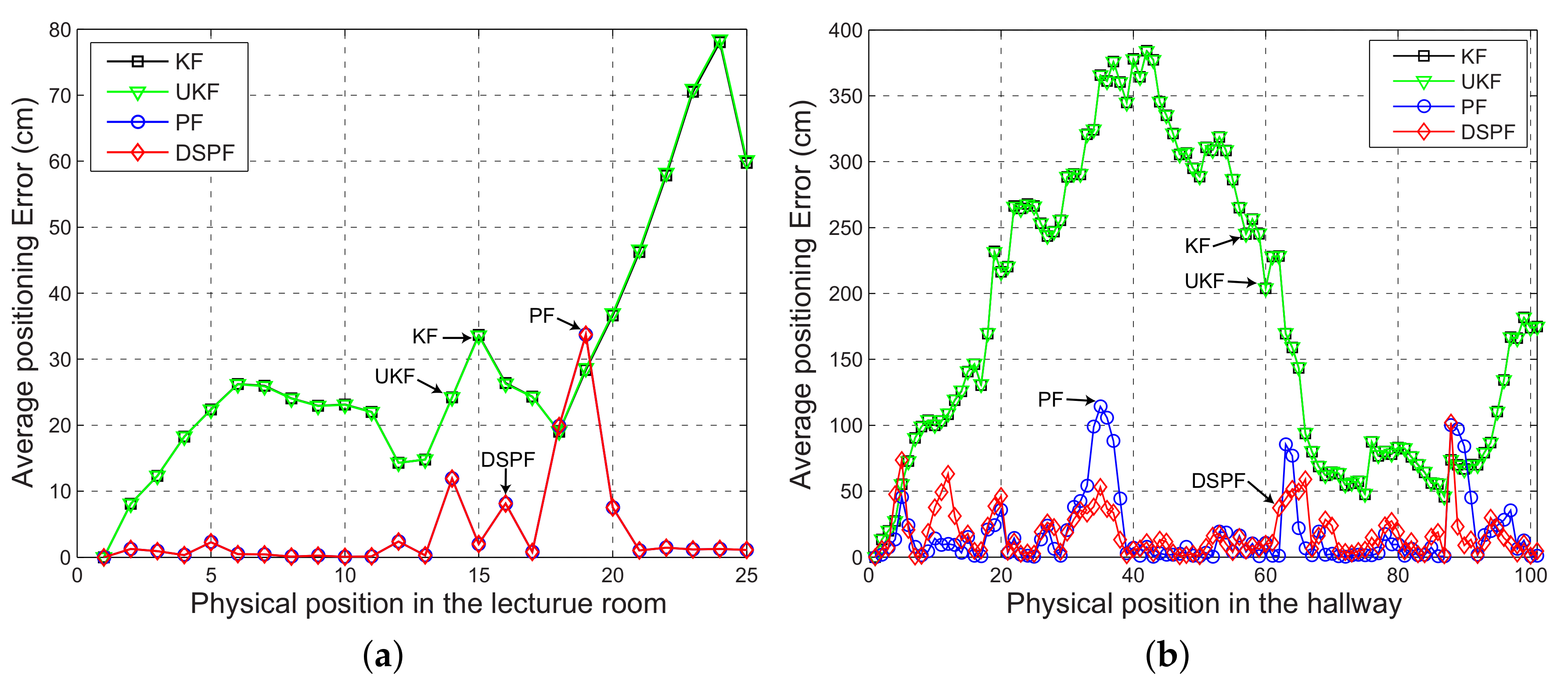
5.1. Positioning Accuracy
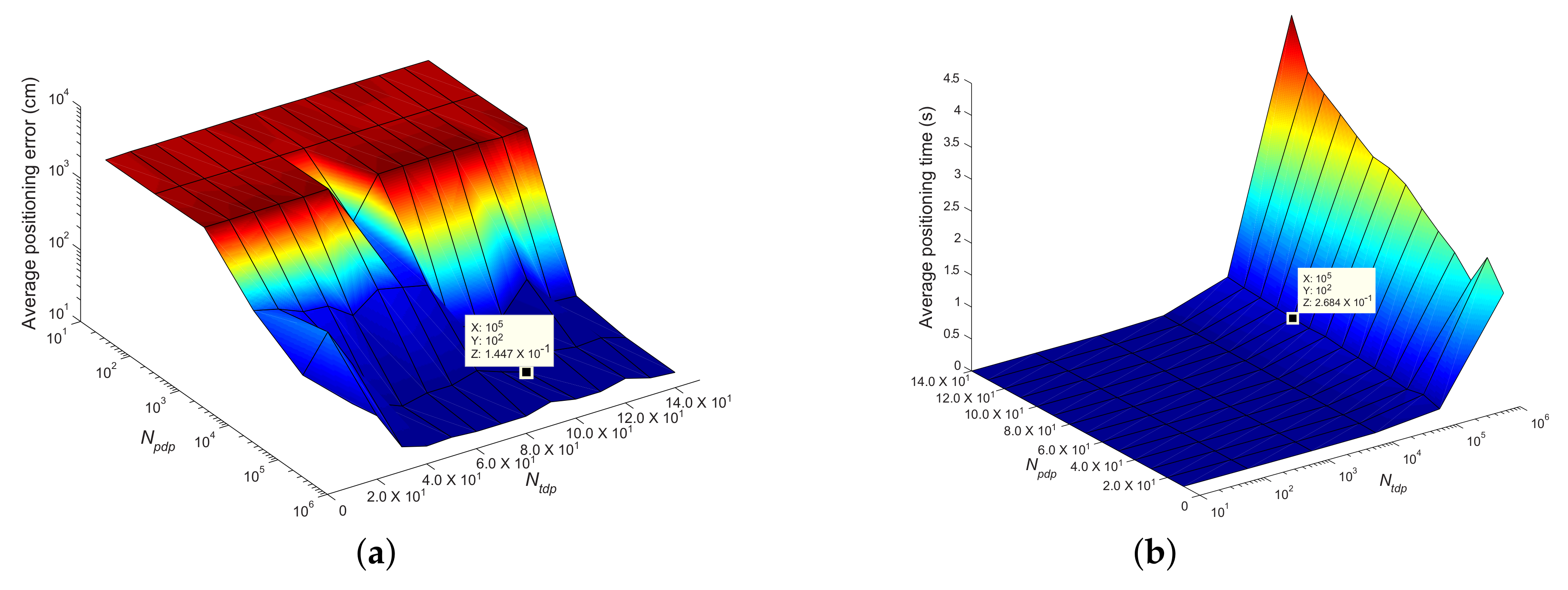
5.2. Effect of Sample Size
5.3. Computation Cost
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Dedes, G.; Dempster, A.G. Indoor GPS positioning—Challenges and opportunities. In Proceedings of the VTC-2005-Fall. 2005 IEEE 62nd Vehicular Technology Conference, Dallas, TX, USA, 28 September 2005; Volume 1, pp. 412–415. [Google Scholar]
- Nirjon, S.; Liu, J.; DeJean, G.; Priyantha, B.; Jin, Y.; Hart, T. COIN-GPS: Indoor Localization from Direct GPS Receiving. In Proceedings of the 12th Annual International Conference on Mobile Systems, Applications, and Services, Bretton Woods, NH, USA, 16–19 June 2014. [Google Scholar]
- Bo, C.; Li, X.Y.; Jung, T.; Mao, X.; Tao, Y.; Yao, L. SmartLoc: Push the Limit of the Inertial Sensor Based Metropolitan Localization Using Smartphone. In Proceedings of the 19th Annual International Conference on Mobile Computing &Networking, Miami, FL, USA, 30 September–4 October 2013; pp. 195–198. [Google Scholar]
- Yang, Z.; Wu, C.; Zhou, Z.; Zhang, X.; Wang, X.; Liu, Y. Mobility Increases Localizability: A Survey on Wireless Indoor Localization Using Inertial Sensors. ACM Comput. Surv. 2015, 47, 54. [Google Scholar] [CrossRef]
- Han, H.; Yi, S.; Li, Q.; Shen, G.; Liu, Y.; Novak, E. AMIL: Localizing neighboring mobile devices through a simple gesture. In Proceedings of the IEEE INFOCOM 2016—The 35th Annual IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016; pp. 1–9. [Google Scholar]
- Smith, I.; Tabert, J.; Wild, T.; Lamarca, A.; Chawathe, Y.; Consolvo, S.; Hightower, J.; Scott, J.; Sohn, T.; Howard, J.; et al. Place lab: Device positioning using radio beacons in the wild. In Proceedings of the International Conference on Pervasive Computing, Munich, Germany, 8–13 May 2005; pp. 116–133. [Google Scholar]
- Faragher, R.; Harle, R. Location Fingerprinting With Bluetooth Low Energy Beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Chen, Z.; Zhu, Q.; Soh, Y.C. Smartphone Inertial Sensor-Based Indoor Localization and Tracking With iBeacon Corrections. IEEE Trans. Ind. Inform. 2016, 12, 1540–1549. [Google Scholar] [CrossRef]
- Ho, Y.H.; Chan, H.C.B. BluePrint: BLE Positioning Algorithm Based on NUFO Detection. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- He, S.; Chan, S.H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- He, S.; Chan, S.H.G.; Yu, L.; Liu, N. SLAC: Calibration-Free Pedometer-Fingerprint Fusion for Indoor Localization. IEEE Trans. Mob. Comput. 2018, 17, 1176–1189. [Google Scholar] [CrossRef]
- Li, Q.; Li, W.; Sun, W.; Li, J.; Liu, Z. Fingerprint and Assistant Nodes Based Wi-Fi Localization in Complex Indoor Environment. IEEE Access 2016, 4, 2993–3004. [Google Scholar] [CrossRef]
- Molina, B.; Olivares, E.; Palau, C.E.; Esteve, M. A Multimodal Fingerprint-Based Indoor Positioning System for Airports. IEEE Access 2018, 6, 10092–10106. [Google Scholar] [CrossRef]
- Caceres, M.A.; Sottile, F.; Spirito, M.A. Adaptive Location Tracking by Kalman Filter in Wireless Sensor Networks. In Proceedings of the 2009 IEEE International Conference on Wireless and Mobile Computing, Networking and Communications, Marrakech, Morocco, 12–14 October 2009; pp. 123–128. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef]
- Van der Merwe, R. Sigma-point Kalman Filters for Probabilistic Inference in Dynamic State Space Models. PH.D. Thesis, Oregon Health & Science University, Portland, OR, USA, 2004. [Google Scholar]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef] [Green Version]
- Beacon Sandwich. What is iBeacon. Available online: http://www.beaconsandwich.com/what-is-ibeacon.html/ (accessed on 9 August 2019).
- Gu, Y.; Ren, F. Energy-Efficient Indoor Localization of Smart Hand-Held Devices Using Bluetooth. IEEE Access 2015, 3, 1450–1461. [Google Scholar] [CrossRef]
- Varela, P.M.; Ohtsuki, T.O. Discovering Co-Located Walking Groups of People Using iBeacon Technology. IEEE Access 2016, 4, 6591–6601. [Google Scholar] [CrossRef]
- Evennou, F.; Marx, F. Advanced Integration of WiFi and Inertial Navigation Systems for Indoor Mobile Positioning. EURASIP J. Appl. Signal Process. 2006, 2006, 164–174. [Google Scholar] [CrossRef]
- Nurminen, H.; Ristimäki, A.; Ali-Löytty, S.; Piché, R. Particle filter and smoother for indoor localization. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard-Belfort, France, 28–31 October 2013; pp. 1–10. [Google Scholar]
- Xie, H.; Gu, T.; Tao, X.; Ye, H.; Lu, J. A Reliability-Augmented Particle Filter for Magnetic Fingerprinting Based Indoor Localization on Smartphone. IEEE Trans. Mob. Comput. 2016, 15, 1877–1892. [Google Scholar] [CrossRef]
- Shu, Y.; Huang, Y.; Zhang, J.; Coué, P.; Cheng, P.; Chen, J.; Shin, K.G. Gradient-Based Fingerprinting for Indoor Localization and Tracking. IEEE Trans. Ind. Electron. 2016, 63, 2424–2433. [Google Scholar] [CrossRef]
- Sung, K.; Lee, D.K.R.; Kim, H. Indoor Pedestrian Localization Using iBeacon and Improved Kalman Filter. Sensors 2018, 18, 1722. [Google Scholar] [CrossRef] [PubMed]
- Doucet, A.; Godsill, S.; Andrieu, C. On sequential Monte Carlo sampling methods for Bayesian filtering. Stat. Comput. 2000, 10, 197–208. [Google Scholar] [CrossRef]
- Duda, R.O.; Hart, P.E.; Stork, D.G. Pattern Classification; John Wiley & Sons: New York, NY, USA, 2012. [Google Scholar]
- Li, F.; Zhao, C.; Ding, G.; Gong, J.; Liu, C.; Zhao, F. A reliable and accurate indoor localization method using phone inertial sensors. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 421–430. [Google Scholar]
- Mulloni, A.; Wagner, D.; Barakonyi, I.; Schmalstieg, D. Indoor Positioning and Navigation with Camera Phones. IEEE Pervasive Comput. 2009, 8, 22–31. [Google Scholar] [CrossRef]
- Yuan, X.; Yu, S.; Zhang, S.; Wang, G.; Liu, S. Quaternion-Based Unscented Kalman Filter for Accurate Indoor Heading Estimation Using Wearable Multi-Sensor System. Sensors 2015, 15, 10872–10890. [Google Scholar] [CrossRef]
- Motwani, A.; Liu, W.; Sharma, S.; Sutton, R.; Bucknall, R. An interval Kalman filter–based fuzzy multi-sensor fusion approach for fault-tolerant heading estimation of an autonomous surface vehicle. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2016, 230, 491–507. [Google Scholar] [CrossRef]
- Chen, W.; Chen, R.; Chen, Y.; Kuusniemi, H.; Wang, J. An effective Pedestrian Dead Reckoning algorithm using a unified heading error model. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 340–347. [Google Scholar]
- Kunze, K.; Lukowicz, P.; Partridge, K.; Begole, B. Which Way Am I Facing: Inferring Horizontal Device Orientation from an Accelerometer Signal. In Proceedings of the 2009 International Symposium on Wearable Computers, Linz, Austria, 4–7 September 2009; pp. 149–150. [Google Scholar]
- Deng, Z.A.; Wang, G.; Hu, Y.; Wu, D. Heading Estimation for Indoor Pedestrian Navigation Using a Smartphone in the Pocket. Sensors 2015, 15, 21518–21536. [Google Scholar] [CrossRef] [PubMed]
- Deng, Z.; Liu, X.; Qu, Z.; Hou, C.; Si, W. Robust heading estimation for indoor pedestrian navigation using unconstrained smartphones. Wirel. Commun. Mob. Comput. 2018, 2018, 5607036. [Google Scholar] [CrossRef]
- Kang, W.; Han, Y. SmartPDR: Smartphone-Based Pedestrian Dead Reckoning for Indoor Localization. IEEE Sens. J. 2015, 15, 2906–2916. [Google Scholar] [CrossRef]
- Kang, W.; Nam, S.; Han, Y.; Lee, S. Improved heading estimation for smartphone-based indoor positioning systems. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Sydney, Australia, 9–12 September 2012; pp. 2449–2453. [Google Scholar]
- Xiao, Z.; Wen, H.; Markham, A.; Trigoni, N. Robust pedestrian dead reckoning (R-PDR) for arbitrary mobile device placement. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 187–196. [Google Scholar]
- Apple Developer. iOS Developer Library. Available online: https://developer.apple.com/documentation/corelocation/ (accessed on 9 August 2019).
- Google Developers. Android Developer Library. Available online: https://developer.android.com/reference/android/hardware/SensorManager.html (accessed on 9 August 2019).
- Rai, A.; Chintalapudi, K.K.; Padmanabhan, V.N.; Sen, R. Zee: Zero-effort crowdsourcing for indoor localization. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012; pp. 293–304. [Google Scholar]
- Sun, W.; Liu, J.; Wu, C.; Yang, Z.; Zhang, X.; Liu, Y. MoLoc: On Distinguishing Fingerprint Twins. In Proceedings of the 2013 IEEE 33rd International Conference on Distributed Computing Systems, Philadelphia, PA, USA, 8–11 July 2013; pp. 226–235. [Google Scholar]
- Gordon, N.; Salmond, D.; Smith, A. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. Proc. Inst. Elect. Eng. F 1993, 140, 107–113. [Google Scholar] [CrossRef] [Green Version]
- Bowman, A.; Azzalini, A. Applied Smoothing Techniques for Data Analysis: The Kernel Approach with S-Plus Illustrations: The Kernel Approach with S-Plus Illustrations; OUP: Oxford, UK, 1997. [Google Scholar]
- Kitagawa, G. Monte Carlo filter and smoother for non-Gaussian nonlinear state space models. J. Comput. Graph. Stat. 1996, 5, 1–25. [Google Scholar]
- Google Code Archive. Private Apple80211 Framework. Available online: https://code.google.com/archive/p/iphone-wireless/ (accessed on 9 August 2019).
- Kantas, N.; Doucet, A.; Singh, S.S.; Maciejowski, J.; Chopin, N. On particle methods for parameter estimation in state-space models. Stat. Sci. 2015, 30, 328–351. [Google Scholar] [CrossRef]
- Bolić, M.; Djurić, P.M.; Hong, S. Resampling Algorithms for Particle Filters: A Computational Complexity Perspective. EURASIP J. Appl. Signal Process. 2004, 2004, 2267–2277. [Google Scholar] [CrossRef]
- Li, T.; Bolic, M.; Djuric, P.M. Resampling Methods for Particle Filtering: Classification, implementation, and strategies. IEEE Signal Process. Mag. 2015, 32, 70–86. [Google Scholar] [CrossRef]
- Hartikainen, J.; Särkkä, S. Kalman filtering and smoothing solutions to temporal Gaussian process regression models. In Proceedings of the 2010 IEEE International Workshop on Machine Learning for Signal Processing, Kittila, Finland, 29 August–1 September 2010; pp. 379–384. [Google Scholar]
- Merwe, R.V.D.; Wan, E.A. The square-root unscented Kalman filter for state and parameter-estimation. In Proceedings of the 2001 IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Salt Lake City, UT, USA, 7–11 May 2001; pp. 3461–3464. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Technique | Environment | Sample | Accuracy Mean |
|---|---|---|---|---|
| Size | Error (m) | |||
| Evennou and Marx [22] | DR, WiFi RSS | Corridor and room in | 10,000 | 1.53 m mean |
| fingerprinting, KF, | indoor office building | |||
| and PF | (40 m × 40 m) | |||
| Nurminen et al. [23] | DR, WiFi RSS | Corridor in | 400 | 2.0 m mean |
| fingerprinting, PF, | campus building | |||
| and smoother | (95 m × 61 m) | |||
| Xie et al. [24] | DR, magnetic | 5000 | 2.0 m mean | |
| fingerprinting, and | Hall, conference room, | |||
| reliability-augmented PF | corridor, and library | |||
| GIFT [25] | DR, RSS gradient-based | Five-story | 2000 | 5.6 m in 80% |
| fingerprinting, and | office building | |||
| extended PF | (8000 ) | |||
| SLAC [11] | DR, WiFi RSS | 60 | 6 m medianin airport and 3.8 mmedian in atrium | |
| fingerprinting, convex | Airport (10,000 ) and | |||
| optimization localization, | campus atrium (4000 ) | |||
| and specialized PF | ||||
| Sung et al. [26] | DR, WiFi/iBeacon | Corridor and room in | 4 | 0.7 m mean |
| RSS fingerprinting, | campus building | |||
| and SKPF | (37.3 m × 26.5 m) | |||
| Proposed Scheme | DR, WiFi/iBeacon | Corridor and room in | 100 | 0.3 m mean |
| RSS fingerprinting, | campus building | |||
| and DSPF | (37.3 m × 26.5 m) |
| Notation | Description |
|---|---|
| DR | Dead reckoning (position prediction) via heading angles and accelerations |
| DRC1 | DR and position correction (update) via observation determined by heading and WiFi RSS data |
| DRC2 | As in DRC1, but for observation determined by heading and iBeacon RSS data |
| DRC3 | As in DRC1, but for observation determined by heading, WiFi RSS, and iBeacon RSS data |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sung, K.; Lee, H.K.; Kim, H. Pedestrian Positioning Using a Double-Stacked Particle Filter in Indoor Wireless Networks. Sensors 2019, 19, 3907. https://doi.org/10.3390/s19183907
Sung K, Lee HK, Kim H. Pedestrian Positioning Using a Double-Stacked Particle Filter in Indoor Wireless Networks. Sensors. 2019; 19(18):3907. https://doi.org/10.3390/s19183907
Chicago/Turabian StyleSung, Kwangjae, Hyung Kyu Lee, and Hwangnam Kim. 2019. "Pedestrian Positioning Using a Double-Stacked Particle Filter in Indoor Wireless Networks" Sensors 19, no. 18: 3907. https://doi.org/10.3390/s19183907
APA StyleSung, K., Lee, H. K., & Kim, H. (2019). Pedestrian Positioning Using a Double-Stacked Particle Filter in Indoor Wireless Networks. Sensors, 19(18), 3907. https://doi.org/10.3390/s19183907