An FPGA-Based Neuro-Fuzzy Sensor for Personalized Driving Assistance


Abstract
:1. Introduction
Personalization Approaches in ADAS
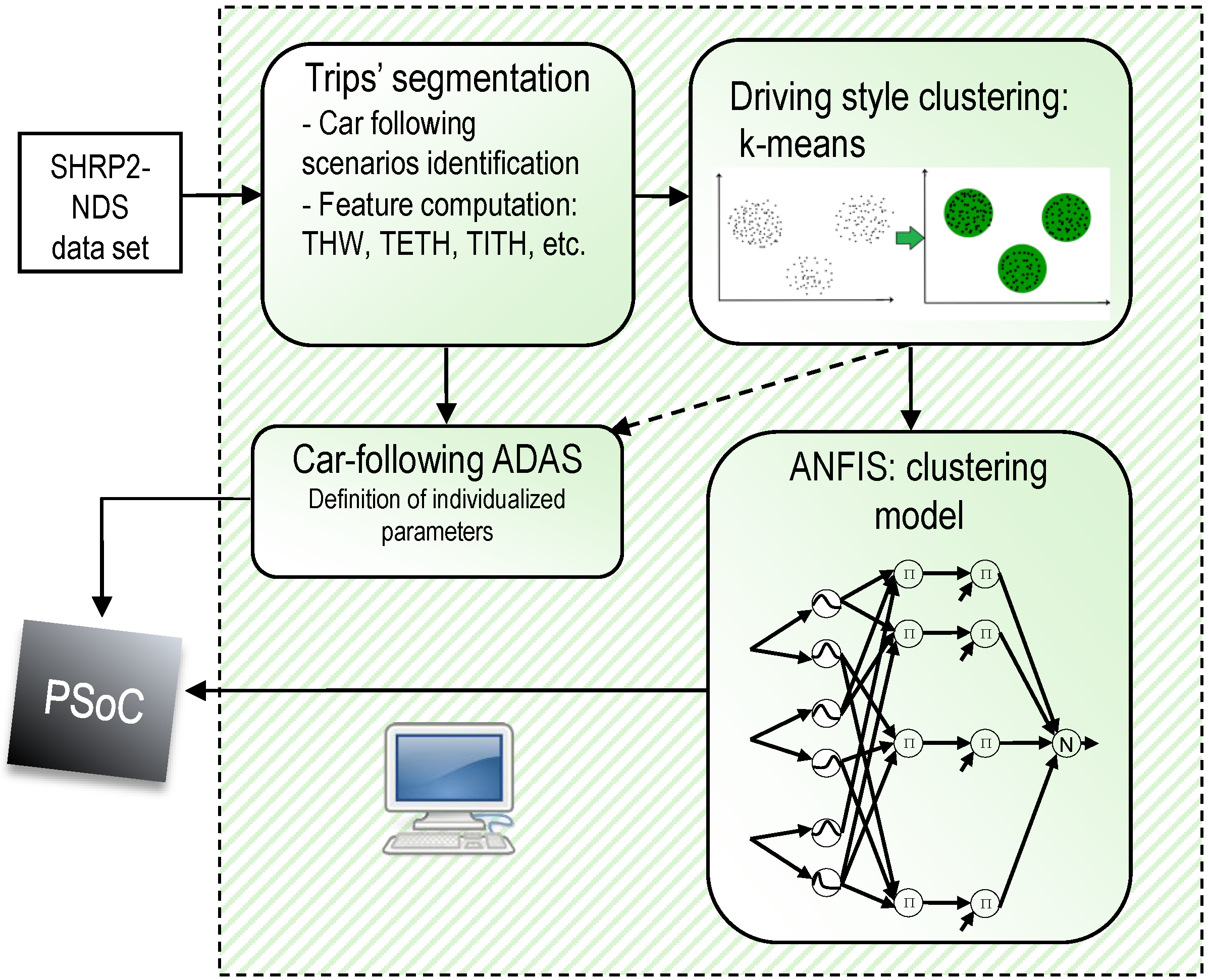
2. Outline of Driving-Style Personalization System
3. Driving Style Characterization in Car-Following Scenarios
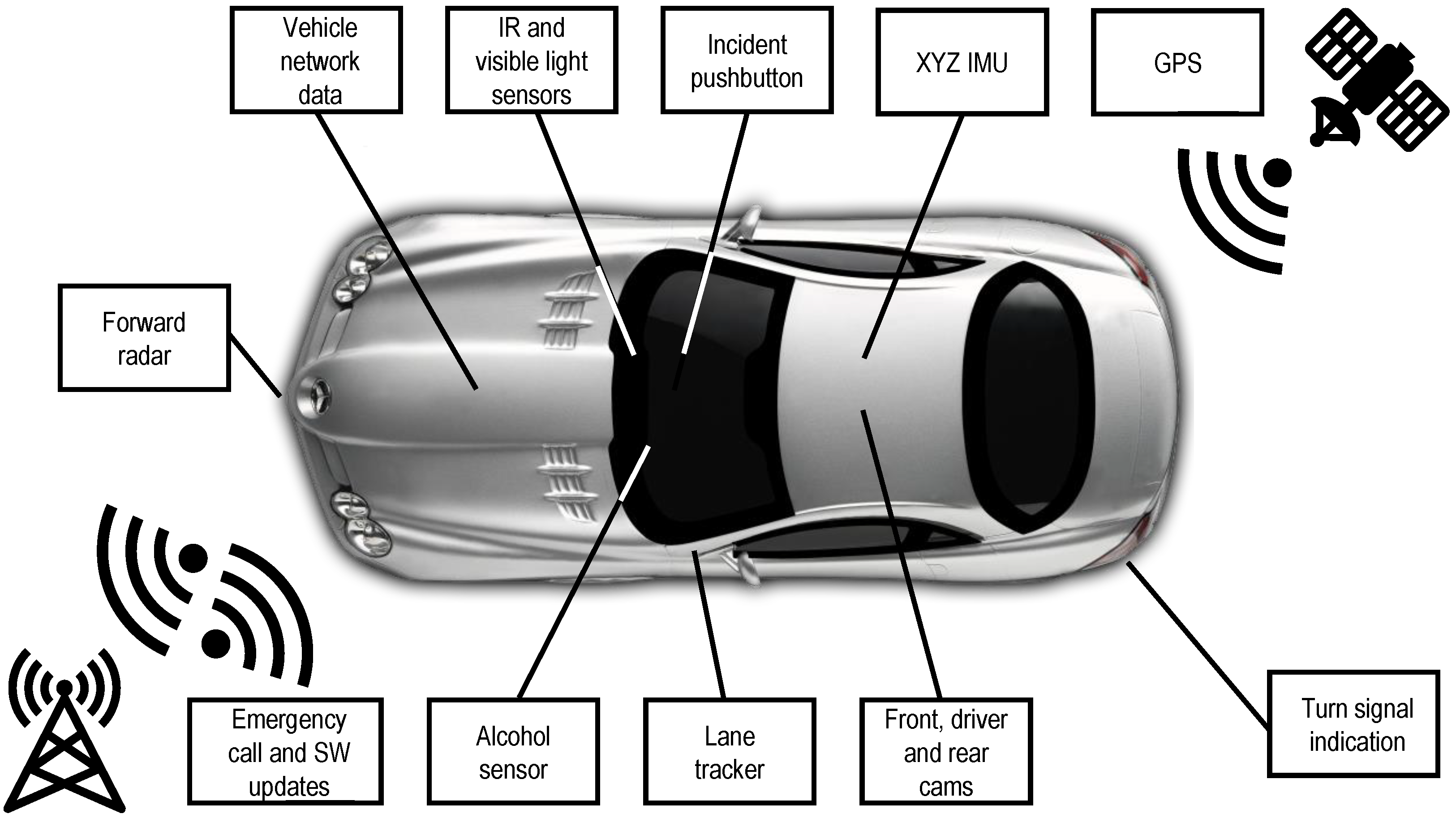
3.1. SHRP2-NDS Description
3.2. Car-Following Situations
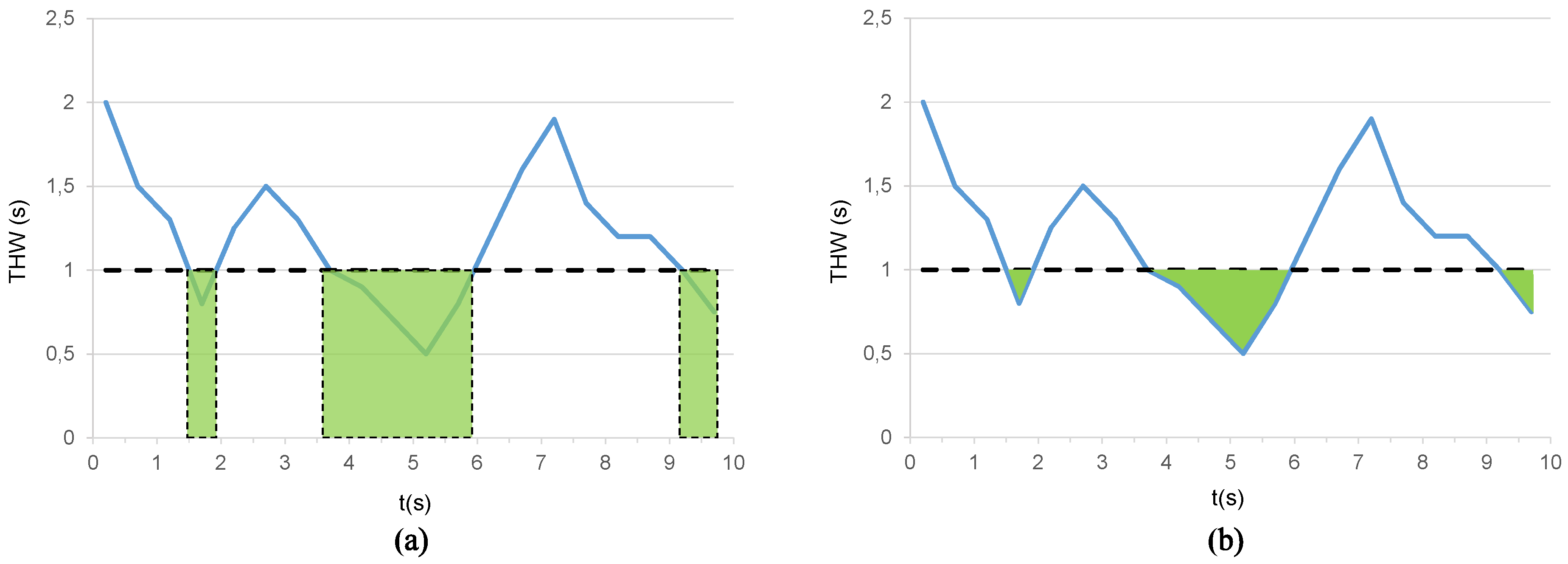
3.2.1. Driving Parameters and Driving-Style Characterization
3.2.2. Steady Car-Following Premises
3.3. Car-Following Stretches in the SHRP2-NDS Trips
Steady Car-Following Segments
4. Neuro-Fuzzy Modeling of Driving-Style Clusters
4.1. Driving-Style Clustering
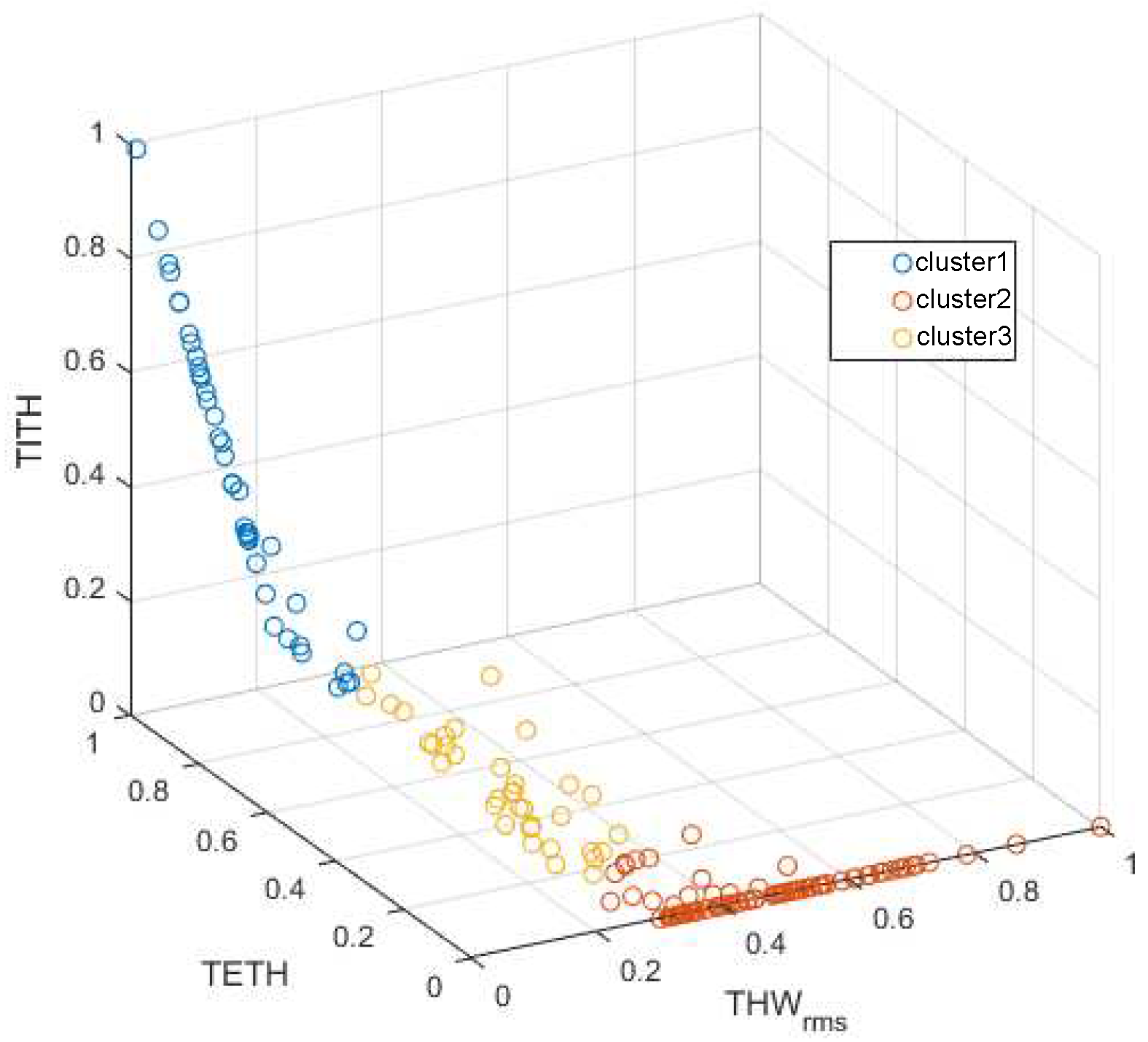
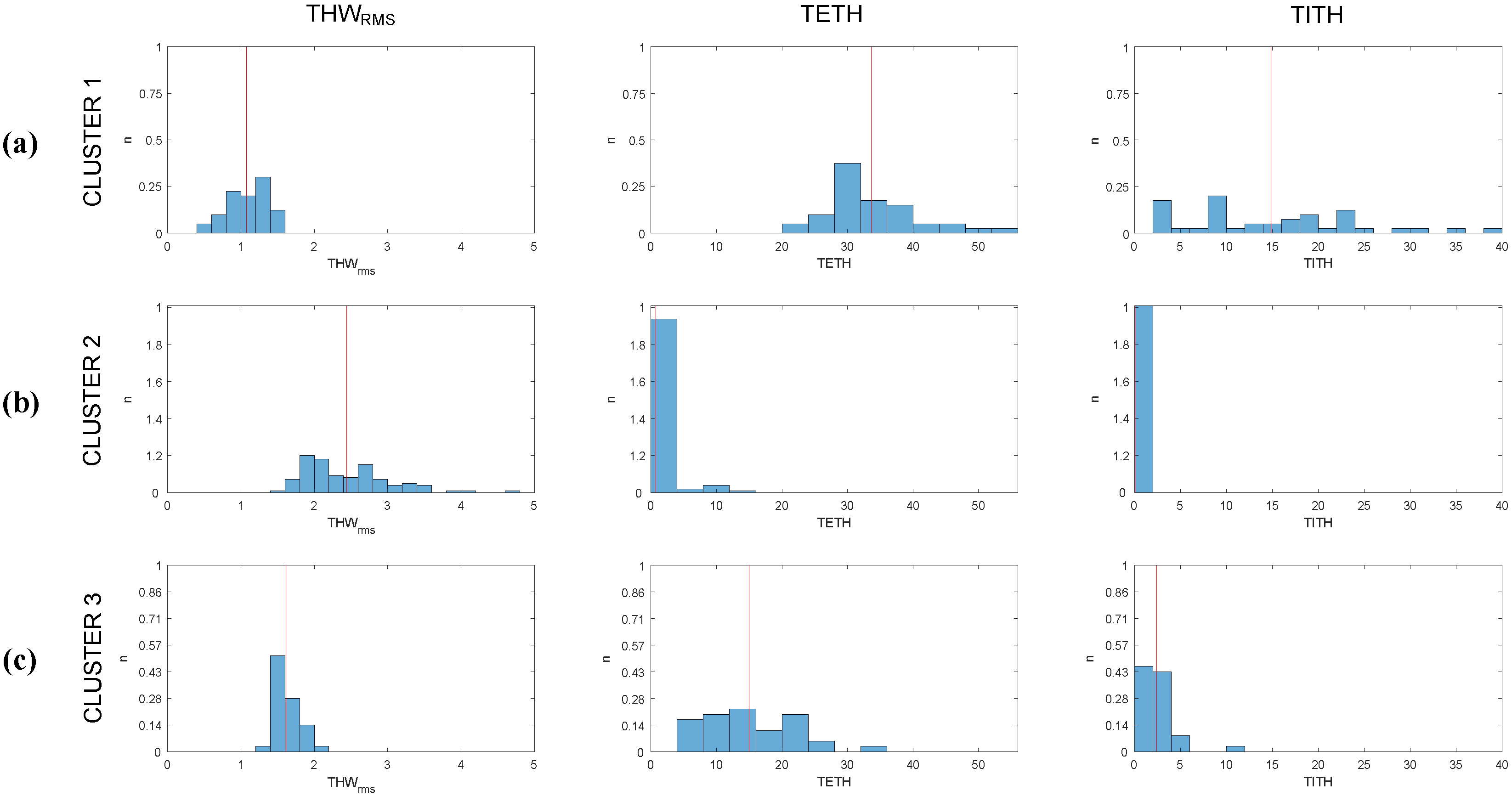
K-Means Clustering Results
- Cluster 1: groups the drivers with the lowest and the highest TETH and TITH. This cluster is representative of the most aggressive car followers.
- Cluster 2: groups the drivers with high values and minimum TETH and TITH. Thus, it incorporates the least aggressive car followers.
- Cluster 3: groups the drivers with low values, medium to low TETH and the lowest TITH, representing medium aggressive car followers.
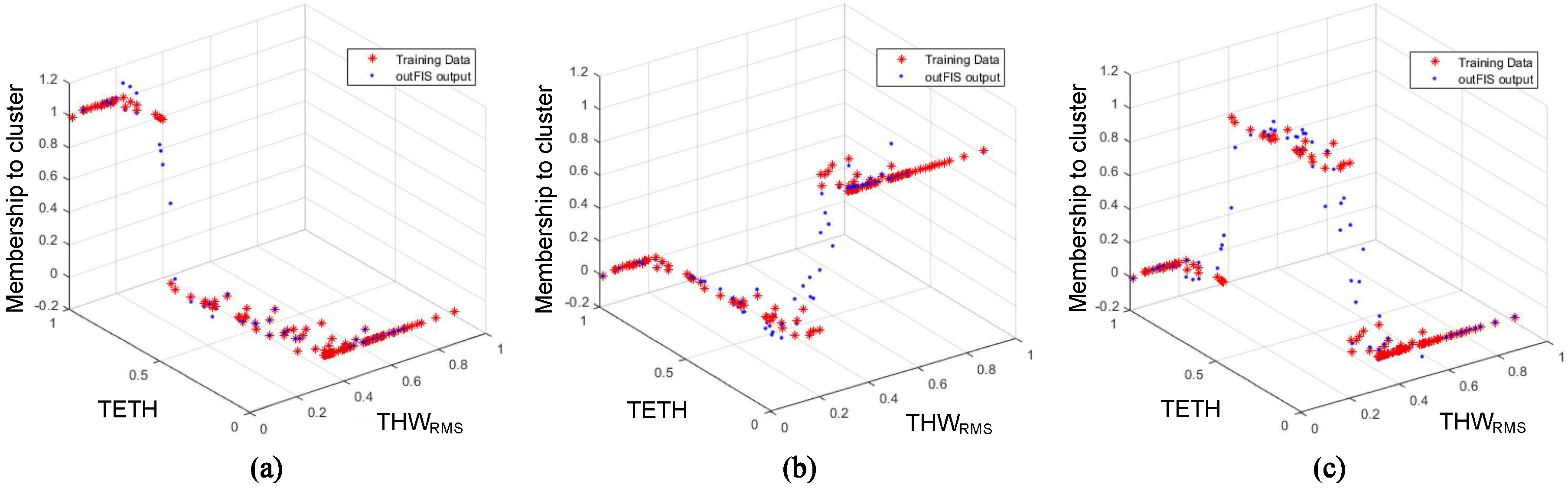
4.2. ANFIS-Based Identification
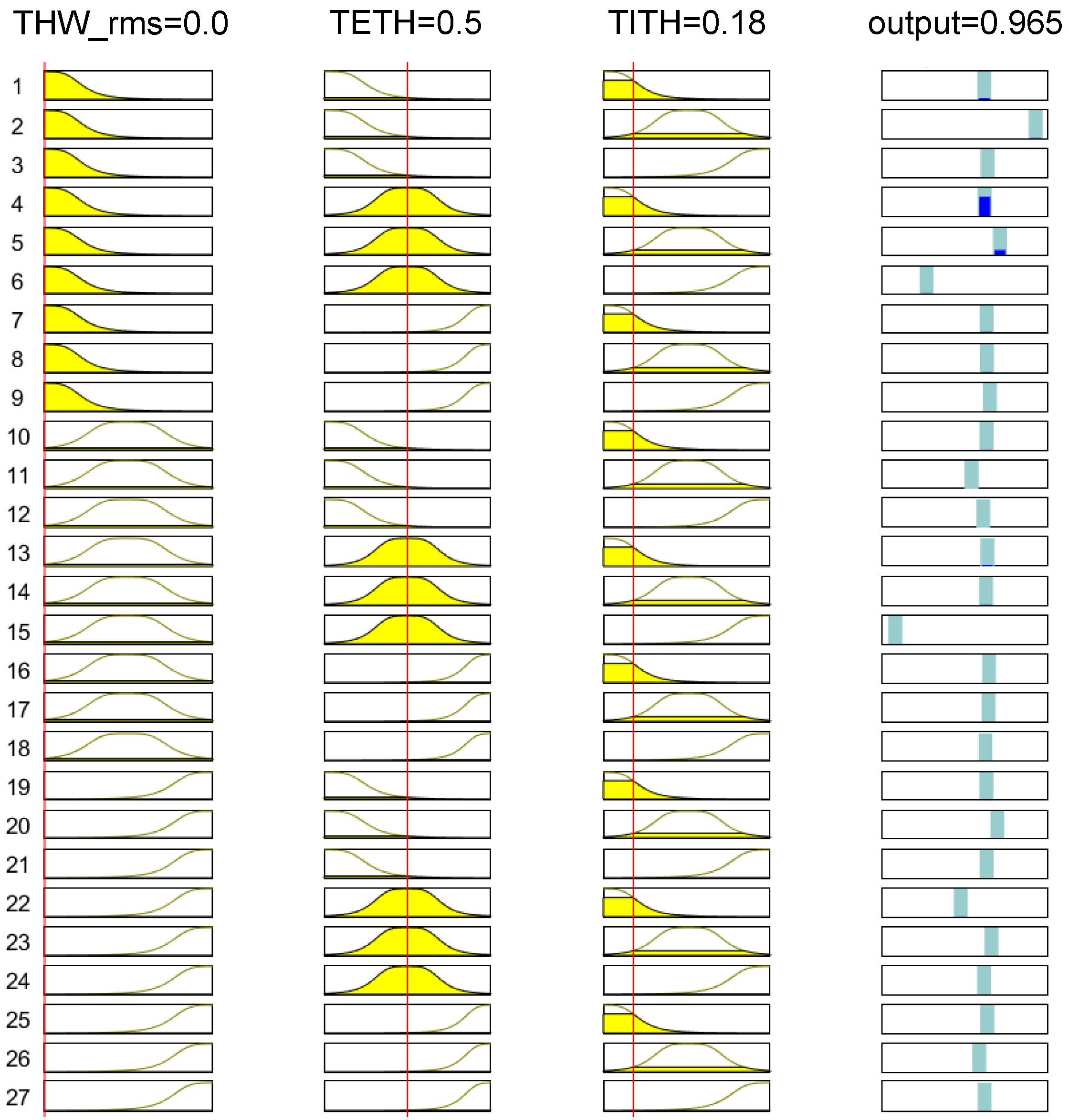
4.2.1. Zero-Order Takagi–Sugeno Inference System
4.2.2. ANFIS Training
4.2.3. ANFIS Testing and Identification Results
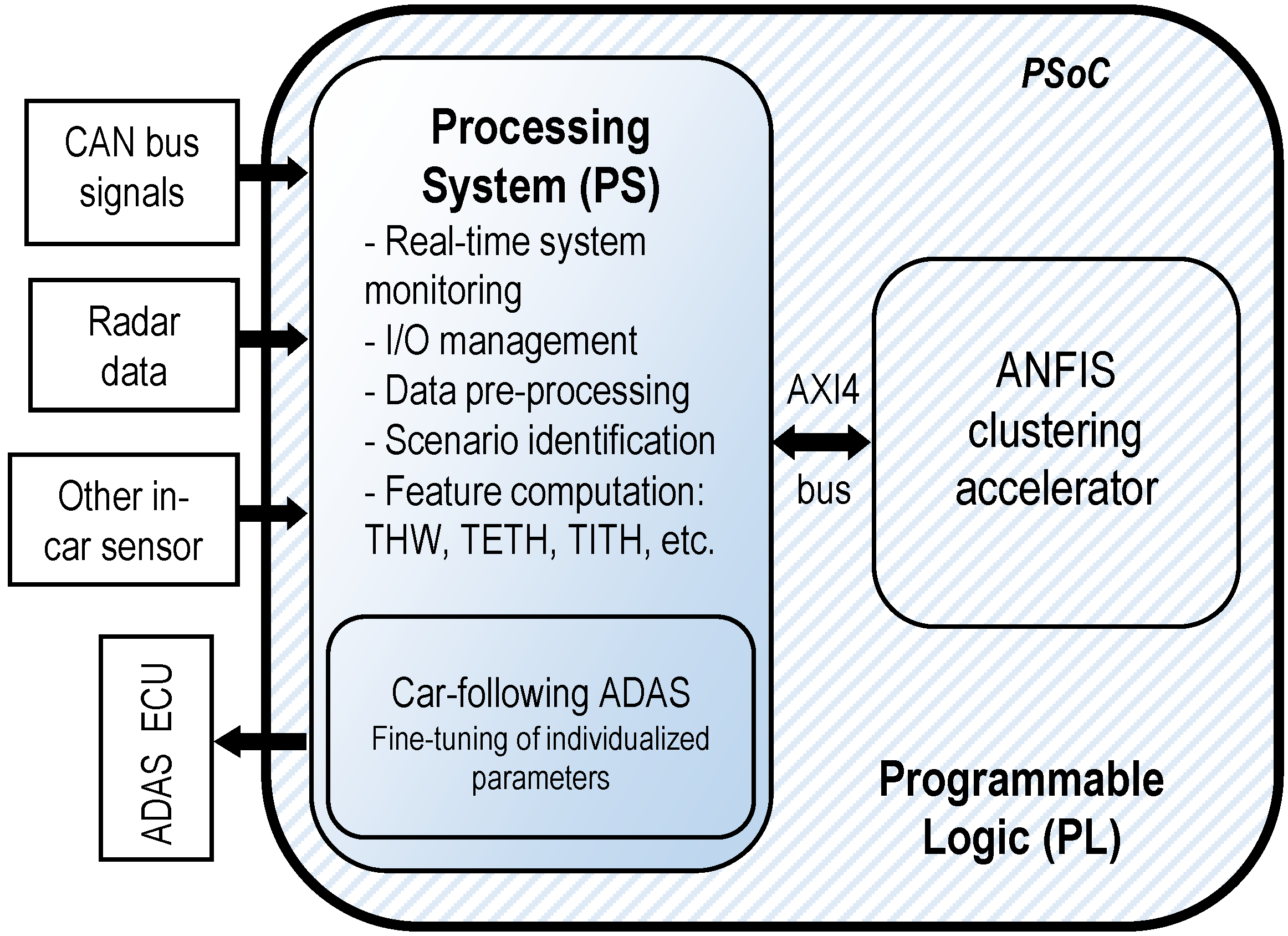
5. Implementation of FPGA-Based Intelligent Sensor
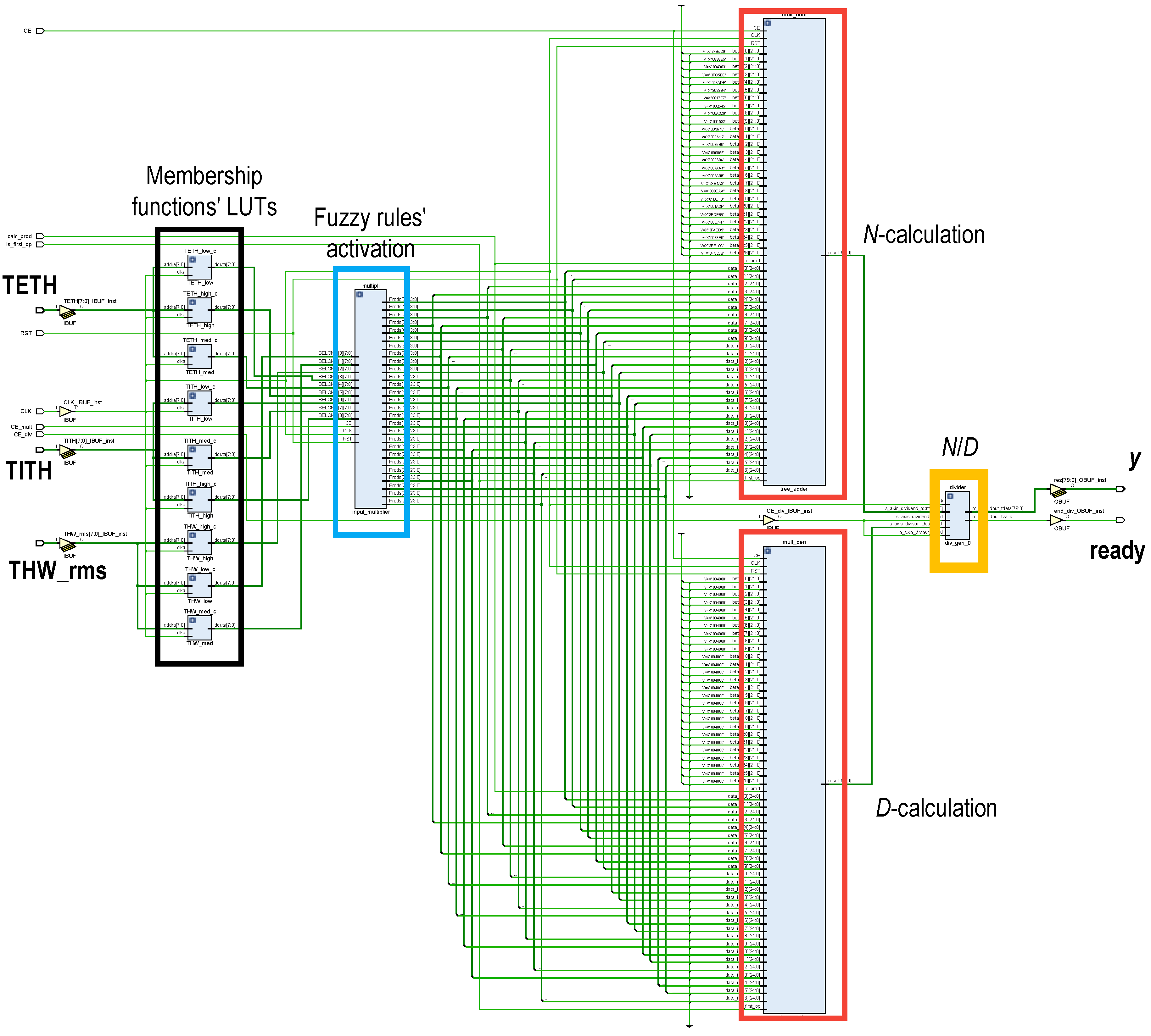
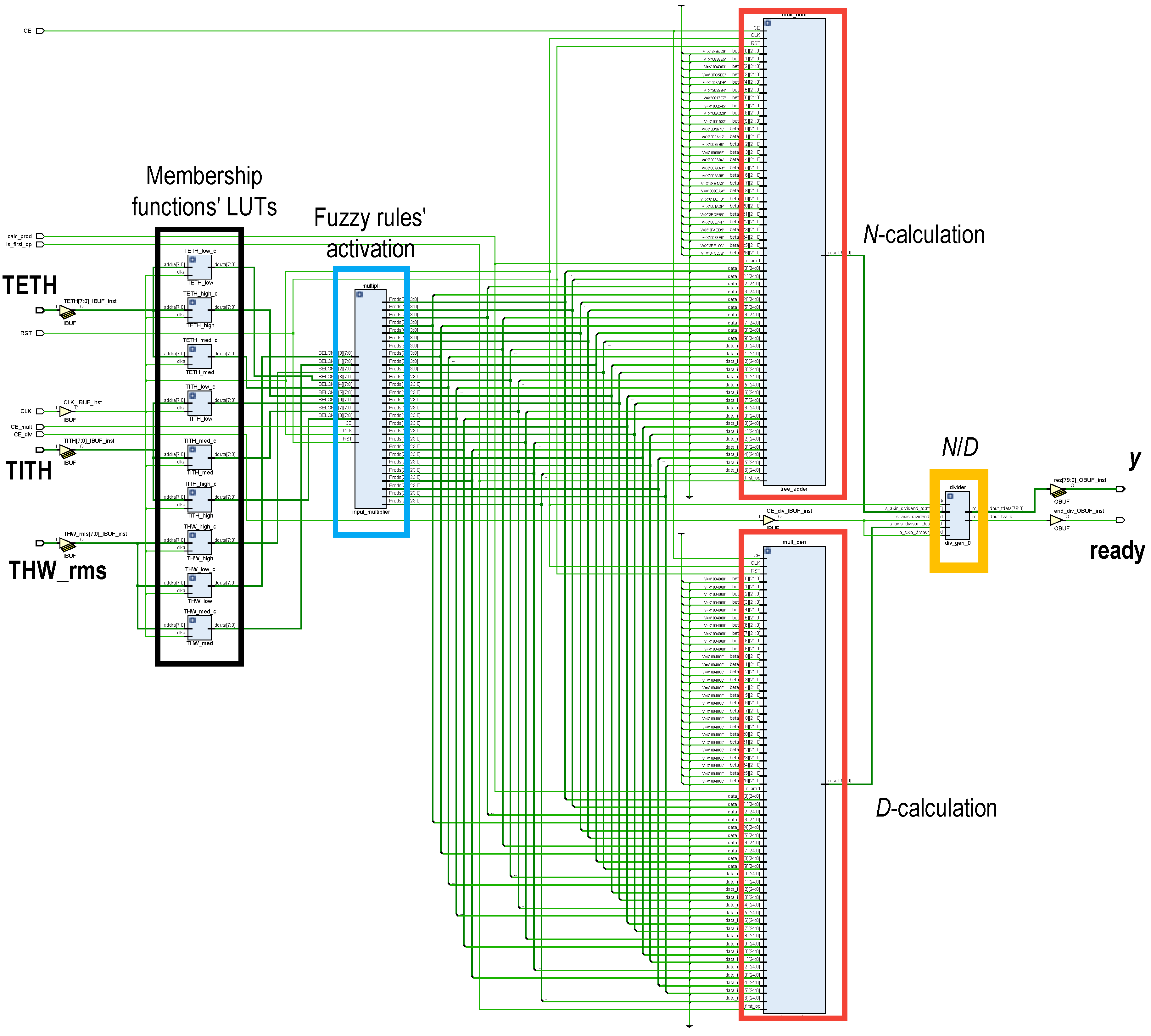
5.1. Hardware Partition: ANFIS Accelerators
5.1.1. Membership Function Evaluation and Fuzzy-Rule Computation
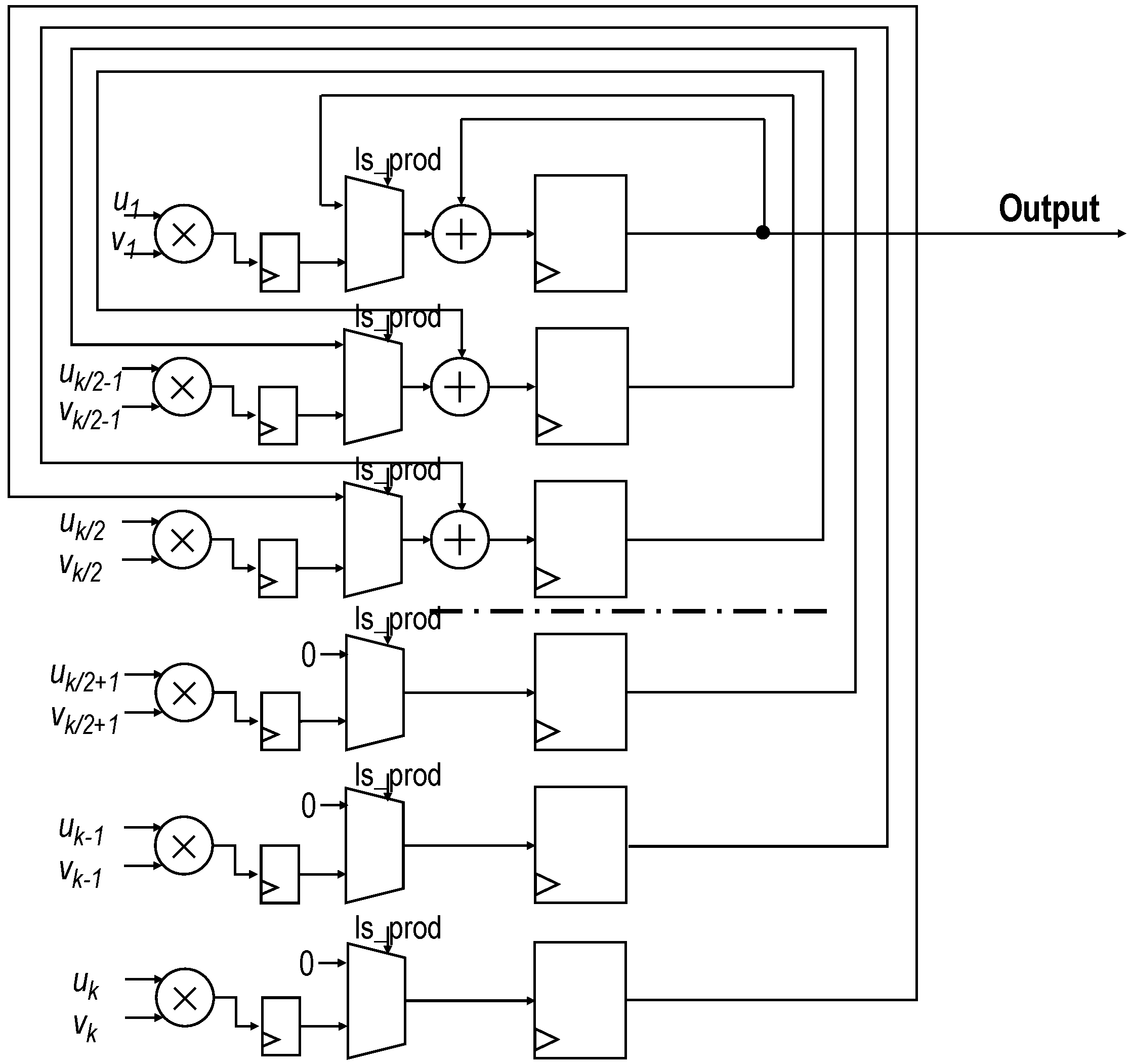
5.1.2. Computation of Sum and Weighted Sum of Rule Activation
- Product signal is_prod set to “1” and all registers are reset.
- Product with computed and stored in each of the k accumulator registers.
- Signal is_prod set back to “0” and first accumulation is performed. Thus, accumulator registers from 1 to contain the sum of products. Registers from to k are now filled with zeros.
- Successive accumulations are performed until valid result is present in register 0.
5.1.3. Divider Module
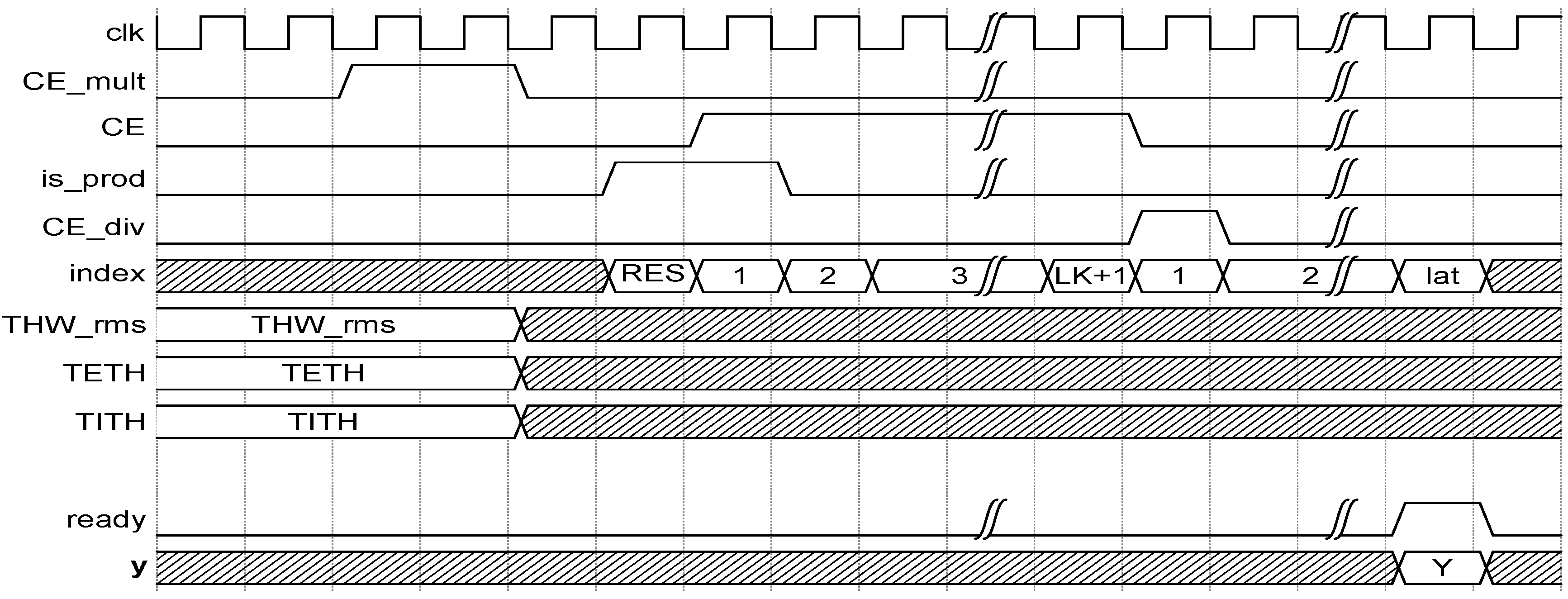
5.1.4. Parameterization and Control Signals
- rst clears pipeline registers and multiplication–accumulation units.
- CE_mult drives multipliers of fuzzy-rule calculation.
- CE activates multiplication–accumulation units to iteratively compute N and D.
- is_prod, in conjunction with the first cycle of CE, is used to indicate that the multiplier–accumulation unit must store the products of the fuzzy rules by their corresponding consequents instead of performing any accumulation.
- CE_div triggers divider module calculating the output result of the ANFIS.
5.2. Experiment Results
5.2.1. Resource Usage
5.2.2. Timing Performance
5.2.3. ACC Personalization Application
Individual-Based Personalization for ACC ADAS
- Cluster 1: s, with s.
- Cluster 2: s, with s.
- Cluster 3: s, with s.
6. Concluding Remarks
Author Contributions
Funding
Conflicts of Interest
Disclaimer
References
- Coutinho, M.G.F.; Torquato, M.F.; Fernandes, M.A.C. Deep Neural Network Hardware Implementation Based on Stacked Sparse Autoencoder. IEEE Access 2019, 7, 40674–40694. [Google Scholar] [CrossRef]
- Bengler, K.; Dietmayer, K.; Farber, B.; Maurer, M.; Stiller, C.; Winner, H. Three Decades of Driver Assistance Systems: Review and Future Perspectives. IEEE Intell. Trans. Syst. Mag. 2014, 6, 6–22. [Google Scholar] [CrossRef]
- Leiber, H.; Czinczel, A.; Anlauf, J. Antiblockiersystem (ABS) für Personenkraftwagen. BOSCH TECH BER 1980, 2, 65–94. [Google Scholar]
- Bleckmann, H.W.; Fennel, H.; Gräber, J.; Seibert, W.W. Traction Control System with Teves ABS Mark II; Technical Report, SAE Technical Paper; SAE: Warrendale, PA, USA, 1986. [Google Scholar]
- Farmer, C.M. Effect of electronic stability control on automobile crash risk. Traffic Inj. Prev. 2004, 5, 317–325. [Google Scholar] [CrossRef] [PubMed]
- National Highway Traffic Safety Administration (NHTSA), U.S. Department of Transportation. 49 CFR 571.126—Standard No. 126; Electronic Stability Control Systems; SAE: Warrendale, PA, USA, 2008.
- Council of European Union. REGULATION (EC) No 661/2009; Council of European Union: Brussels, Belgium, 2009. [Google Scholar]
- Smiley, A. Behavioral adaptation, safety, and intelligent transportation systems. Trans. Res. Rec. 2000, 1724, 47–51. [Google Scholar] [CrossRef]
- Markvollrath; Schleicher, S.; Gelau, C. The influence of Cruise Control and Adaptive Cruise Control on driving behaviour—A driving simulator study. Accid. Anal. Prev. 2011, 43, 1134–1139. [Google Scholar] [CrossRef] [PubMed]
- Feilhauer, M.; Haering, J.; Wyatt, S. Current approaches in HiL-based ADAS testing. SAE Int. J. Commer. Veh. 2016, 9, 63–69. [Google Scholar] [CrossRef]
- Ho, C.; Reed, N.; Spence, C. Multisensory in-car warning signals for collision avoidance. Hum. Factors 2007, 49, 1107–1114. [Google Scholar] [CrossRef]
- Mahajan, R.N.; Patil, A. Lane departure warning system. Int. J. Eng. Technol. Res. 2015, 3, 120–123. [Google Scholar]
- Wali, S.B.; Hannan, M.A.; Hussain, A.; Samad, S.A. Comparative survey on traffic sign detection and recognition: A review. Przegląd Elektrotechniczny 2015, 91, 38–42. [Google Scholar] [CrossRef]
- Caber, N.; Langdon, P.; Clarkson, P.J. Designing Adaptation in Cars: An Exploratory Survey on Drivers’ Usage of ADAS and Car Adaptations. In International Conference on Applied Human Factors and Ergonomics; Springer: Berlin, Germany, 2019; pp. 95–106. [Google Scholar]
- Murray, L. Inside the future cars [Technology Driverless Cars]. Eng. Tech. 2017, 12, 60–62. [Google Scholar] [CrossRef]
- Fleming, J.M.; Allison, C.K.; Yan, X.; Stanton, N.A.; Lot, R. Adaptive driver modelling in ADAS to improve user acceptance: A study using naturalistic data. Saf. Sci. 2018. [Google Scholar] [CrossRef]
- Beggiato, M.; Pereira, M.; Petzoldt, T.; Krems, J. Learning and development of trust, acceptance and the mental model of ACC. A longitudinal on-road study. Trans. Res. Part F Traffic Psychol. Behav. 2015, 35, 75–84. [Google Scholar] [CrossRef]
- Panou, M.C. Intelligent personalized ADAS warnings. Eur. Trans. Res. Rev. 2018, 10, 59. [Google Scholar] [CrossRef] [Green Version]
- Piccinini, G.F.B.; Rodrigues, C.M.; Leitão, M.; Simões, A. Driver’s behavioral adaptation to Adaptive Cruise Control (ACC): The case of speed and time headway. J. Saf. Res. 2014, 49, 77.e1–84. [Google Scholar]
- Hasenjäger, M.; Wersing, H. Personalization in advanced driver assistance systems and autonomous vehicles: A review. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–7. [Google Scholar]
- Dörr, D.; Grabengiesser, D.; Gauterin, F. Online driving style recognition using fuzzy logic. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 1021–1026. [Google Scholar]
- Bifulco, G.N.; Simonelli, F.; Di Pace, R. Experiments toward an human-like Adaptive Cruise Control. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 919–924. [Google Scholar]
- Bifulco, G.N.; Pariota, L.; Simonelli, F.; Di Pace, R. Development and testing of a fully adaptive cruise control system. Trans. Res. Part C Emerg. Tech. 2013, 29, 156–170. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L.; Zhang, D.; Li, K. An adaptive longitudinal driving assistance system based on driver characteristics. IEEE Trans. Intell. Trans. Syst. 2012, 14, 1–12. [Google Scholar] [CrossRef]
- Lefèvre, S.; Carvalho, A.; Gao, Y.; Tseng, H.E.; Borrelli, F. Driver models for personalised driving assistance. Veh. Syst. Dyn. 2015, 53, 1705–1720. [Google Scholar] [CrossRef]
- Muehlfeld, F.; Doric, I.; Ertlmeier, R.; Brandmeier, T. Statistical behavior modeling for driver-adaptive precrash systems. IEEE Trans. Intell. Trans. Syst. 2013, 14, 1764–1772. [Google Scholar] [CrossRef]
- Rosenfeld, A.; Bareket, Z.; Goldman, C.V.; LeBlanc, D.J.; Tsimhoni, O. Learning drivers’ behavior to improve adaptive cruise control. J. Intell. Trans. Syst. 2015, 19, 18–31. [Google Scholar] [CrossRef]
- Canale, M.; Malan, S.; Murdocco, V. Personalization of ACC Stop and Go task based on human driver behaviour analysis. IFAC Proc. Vol. 2002, 35, 357–362. [Google Scholar] [CrossRef]
- De Gelder, E.; Cara, I.; Uittenbogaard, J.; Kroon, L.; van Iersel, S.; Hogema, J. Towards personalised automated driving: Prediction of preferred ACC behaviour based on manual driving. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 1211–1216. [Google Scholar] [CrossRef]
- SHRP 2—Strategic Highway Research Program 2 (SHRP 2). Available online: http://www.trb.org/StrategicHighwayResearchProgram2SHRP2/Blank2.aspx (accessed on 29 June 2019).
- Xilinx. Zynq-7000 SoC Data Sheet: Overview (DS190), v1.11.1; Xilinx: San José, CA, USA, 2018. [Google Scholar]
- Meiring, G.; Myburgh, H. A review of intelligent driving style analysis systems and related artificial intelligence algorithms. Sensors 2015, 15, 30653–30682. [Google Scholar] [CrossRef] [PubMed]
- Abut, H.; Erdoğan, H.; Erçil, A.; Çürüklü, B.; Koman, H.C.; Taş, F.; Argunşah, A.Ö.; Coşar, S.; Akan, B.; Karabalkan, H.; et al. Real-world data collection with “UYANIK”. In In-Vehicle Corpus and Signal Processing for Driver Behavior; Springer: Berlin, Germany, 2009; pp. 23–43. [Google Scholar]
- Angkititrakul, P.; Petracca, M.; Sathyanarayana, A.; Hansen, J.H. UTDrive: Driver behavior and speech interactive systems for in-vehicle environments. In Proceedings of the 2007 IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; pp. 566–569. [Google Scholar]
- Regan, M.; Williamson, A.; Grzebieta, R.; Tao, L. Naturalistic driving studies: Literature review and planning for the Australian naturalistic driving study. In Proceedings of the Australasian College of Road Safety Conference 2012, Sydney, Australia, 9–10 August 2012. [Google Scholar]
- Eenink, R.; Barnard, Y.; Baumann, M.; Augros, X.; Utesch, F. UDRIVE: The European naturalistic driving study. In Proceedings of the IFSTTAR Transport Research Arena, Paris, France, 14–17 April 2014. [Google Scholar]
- Neale, V.L.; Dingus, T.A.; Klauer, S.G.; Sudweeks, J.; Goodman, M. An overview of the 100-car naturalistic study and findings. Natl. Highw. Traffic Saf. Adm. 2005, 5, 0400. [Google Scholar]
- Dingus, T.A.; Hankey, J.M.; Antin, J.F.; Lee, S.E.; Eichelberger, L.; Stulce, K.E.; McGraw, D.; Perez, M.; Stowe, L. Naturalistic Driving Study: Technical Coordination and Quality Control; Number SHRP 2 Report S2-S06-RW-1; TRID: Washington, DC, USA, 2015. [Google Scholar]
- Martínez, V.; del Campo, I.; Echanobe, J.; Basterretxea, K. Driving behavior signals and machine learning: A personalized driver assistance system. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Las Palmas, Spain, 15–18 September 2015; pp. 2933–2940. [Google Scholar]
- Del Campo, I.; Asua, E.; Martínez, V.; Mata-Carballeira, Ó.; Echanobe, J. Driving Style Recognition based on Ride Comfort Using a Hybrid Machine Learning Algorithm. In Proceedings of the IEEE 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 3251–3258. [Google Scholar]
- Murphey, Y.L.; Milton, R.; Kiliaris, L. Driver’s style classification using jerk analysis. In Proceedings of the 2009 IEEE Workshop on Computational Intelligence in Vehicles and Vehicular Systems, Nashville, TN, USA, 30 March–2 April 2009; pp. 23–28. [Google Scholar]
- Miyajima, C.; Nishiwaki, Y.; Ozawa, K.; Wakita, T.; Itou, K.; Takeda, K.; Itakura, F. Driver modeling based on driving behavior and its evaluation in driver identification. Proc. IEEE 2007, 95, 427–437. [Google Scholar] [CrossRef]
- Wang, J.; Li, K.; Lu, X.Y. Chapter 6—Comparative Analysis and Modeling of Driver Behavior Characteristics. In Advances in Intelligent Vehicles; Chen, Y., Li, L., Eds.; Academic Press: Boston, MA, USA, 2014; pp. 159–198. [Google Scholar]
- Higgs, B.; Abbas, M. Segmentation and clustering of car-following behavior: Recognition of driving patterns. IEEE Trans. Intell. Trans. Syst. 2014, 16, 81–90. [Google Scholar] [CrossRef]
- Custer, K.; Sudweeks, J.; Perez, M.A.; del Campo, I.; Echanobe, J.; Martinez, V.; Asua, E.; Basterretxea, K.; Bosque, G.; Martinez, U.; et al. PSoC for Real-Time Driver Assistance Based on Machine Learning IP Cores; Dataset, SHRP2 Naturalistic Driving Study; VTTI: Blacksburg, VA, USA, 2019. [Google Scholar]
- Castignani, G.; Derrmann, T.; Frank, R.; Engel, T. Driver behavior profiling using smartphones: A low-cost platform for driver monitoring. IEEE Intell. Trans. Syst. Mag. 2015, 7, 91–102. [Google Scholar] [CrossRef]
- Shen, J.; Hao, X.; Liang, Z.; Liu, Y.; Wang, W.; Shao, L. Real-time superpixel segmentation by DBSCAN clustering algorithm. IEEE Trans. Image Process. 2016, 25, 5933–5942. [Google Scholar] [CrossRef]
- Moon, T.K. The expectation-maximization algorithm. IEEE Signal Process. Mag. 1996, 13, 47–60. [Google Scholar] [CrossRef]
- Zhao, Y.; Karypis, G. Evaluation of hierarchical clustering algorithms for document datasets. In Proceedings of the Eleventh International Conference on Information and Knowledge Management (ACM–CIKM’02): McLean, VA, USA, 4–9 November 2002; pp. 515–524. [Google Scholar]
- Kalsoom, R.; Halim, Z. Clustering the driving features based on data streams. In Proceedings of the IEEE INMIC, Lahore, Pakistan, 19–20 December 2013; pp. 89–94. [Google Scholar]
- Bhoraskar, R.; Vankadhara, N.; Raman, B.; Kulkarni, P. Wolverine: Traffic and road condition estimation using smartphone sensors. In Proceedings of the IEEE 2012 Fourth International Conference on Communication Systems and Networks (COMSNETS 2012), Bangalore, India, 3–7 January 2012; pp. 1–6. [Google Scholar]
- Brombacher, P.; Masino, J.; Frey, M.; Gauterin, F. Driving event detection and driving style classification using artificial neural networks. In Proceedings of the 2017 IEEE International Conference on Industrial Technology (ICIT), Toronto, ON, Canada, 22–25 March 2017; pp. 997–1002. [Google Scholar]
- Kurt, A.; Özgüner, Ü. A probabilistic model of a set of driving decisions. In Proceedings of the IEEE 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 570–575. [Google Scholar]
- Zadeh, L.A. Fuzzy logic. Computer 1988, 21, 83–93. [Google Scholar] [CrossRef]
- Aljaafreh, A.; Alshabatat, N.; Al-Din, M.S.N. Driving style recognition using fuzzy logic. In Proceedings of the 2012 IEEE International Conference on Vehicular Electronics and Safety (ICVES 2012), Istanbul, Turkey, 24–27 July 2012; pp. 460–463. [Google Scholar]
- Choudhary, A.K.; Ingole, P.K. Smart phone based approach to monitor driving behavior and sharing of statistic. In Proceedings of the IEEE 2014 Fourth International Conference on Communication Systems and Network Technologies, Bhopal, India, 7–9 April 2014; pp. 279–282. [Google Scholar]
- Jang, J.S. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Jang, J.S.; Sun, C.T. Neuro-fuzzy modeling and control. Proc. IEEE 1995, 83, 378–406. [Google Scholar] [CrossRef]
- Xilinx. ZC706 Evaluation Board for the Zynq-7000 XC7Z045 SoC (UG954), v1.7; Xilinx: San José, CA, USA, 2018. [Google Scholar]
- Xilinx. 7 Series DSP48E1 Slice (UG479), v1.10; Xilinx: San José, CA, USA, 2018. [Google Scholar]
- Mata-Carballeira, Ó.; del Campo, I.; Martínez, V.; Echanobe, J. A Hardware/Software Extreme Learning Machine Solution for Improved Ride Comfort in Automobiles. In Proceedings of the IEEE 2019 International Joint Conference on Neural Networks (IJCNN), Auckland, New Zealand, 27–30 October 2019. [Google Scholar]
- Xilinx. Divider Generator v5.1 (PG151); Xilinx: San José, CA, USA, 2016. [Google Scholar]
- Saldaña, H.J.B.; Silva-Cárdenas, C. A digital hardware architecture for a three-input one-output zero-order ANFIS. In Proceedings of the 2012 IEEE 3rd Latin American Symposium on Circuits and Systems (LASCAS), Playa del Carmen, Mexico, 29 February–2 March 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Darvill, J.; Tisan, A.; Cirstea, M. A novel ANFIS algorithm architecture for FPGA implementation. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017; pp. 1243–1248. [Google Scholar] [CrossRef]
- De Souza, A.; Fernandes, M. Parallel fixed point implementation of a radial basis function network in an FPGA. Sensors 2014, 14, 18223–18243. [Google Scholar] [CrossRef] [PubMed]
- Lopes, F.F.; Ferreira, J.C.; Fernandes, M.A. Parallel Implementation on FPGA of Support Vector Machines Using Stochastic Gradient Descent. Electronics 2019, 8, 631. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actual/Identified | Cluster 1 | Cluster 2 | Cluster 3 |
|---|---|---|---|
| Cluster 1 | 6 | 0 | 0 |
| Cluster 2 | 0 | 27 | 0 |
| Cluster 3 | 1 | 1 | 9 |
| Resource | Utilization | Available | % Used |
|---|---|---|---|
| LUT | 13500 | 218600 | 6.17 |
| Flip-flops | 15759 | 437200 | 3.60 |
| RAM blocks | 15 | 545 | 2.76 |
| DSP | 294 | 900 | 32.76 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mata-Carballeira, Ó.; Gutiérrez-Zaballa, J.; del Campo, I.; Martínez, V. An FPGA-Based Neuro-Fuzzy Sensor for Personalized Driving Assistance. Sensors 2019, 19, 4011. https://doi.org/10.3390/s19184011
Mata-Carballeira Ó, Gutiérrez-Zaballa J, del Campo I, Martínez V. An FPGA-Based Neuro-Fuzzy Sensor for Personalized Driving Assistance. Sensors. 2019; 19(18):4011. https://doi.org/10.3390/s19184011
Chicago/Turabian StyleMata-Carballeira, Óscar, Jon Gutiérrez-Zaballa, Inés del Campo, and Victoria Martínez. 2019. "An FPGA-Based Neuro-Fuzzy Sensor for Personalized Driving Assistance" Sensors 19, no. 18: 4011. https://doi.org/10.3390/s19184011
APA StyleMata-Carballeira, Ó., Gutiérrez-Zaballa, J., del Campo, I., & Martínez, V. (2019). An FPGA-Based Neuro-Fuzzy Sensor for Personalized Driving Assistance. Sensors, 19(18), 4011. https://doi.org/10.3390/s19184011