Multidimensional Vibration Suppression Method with Piezoelectric Control for Wind Tunnel Models †

Abstract
:1. Introduction
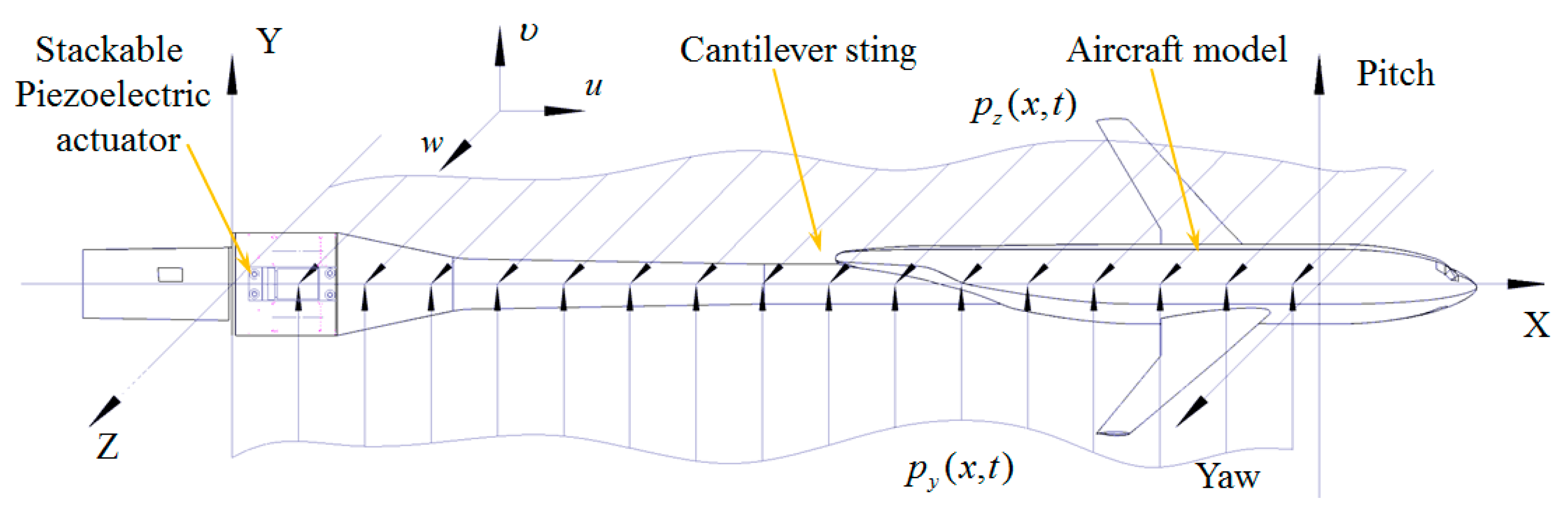
2. Multidimensional Vibration Suppression System and Method
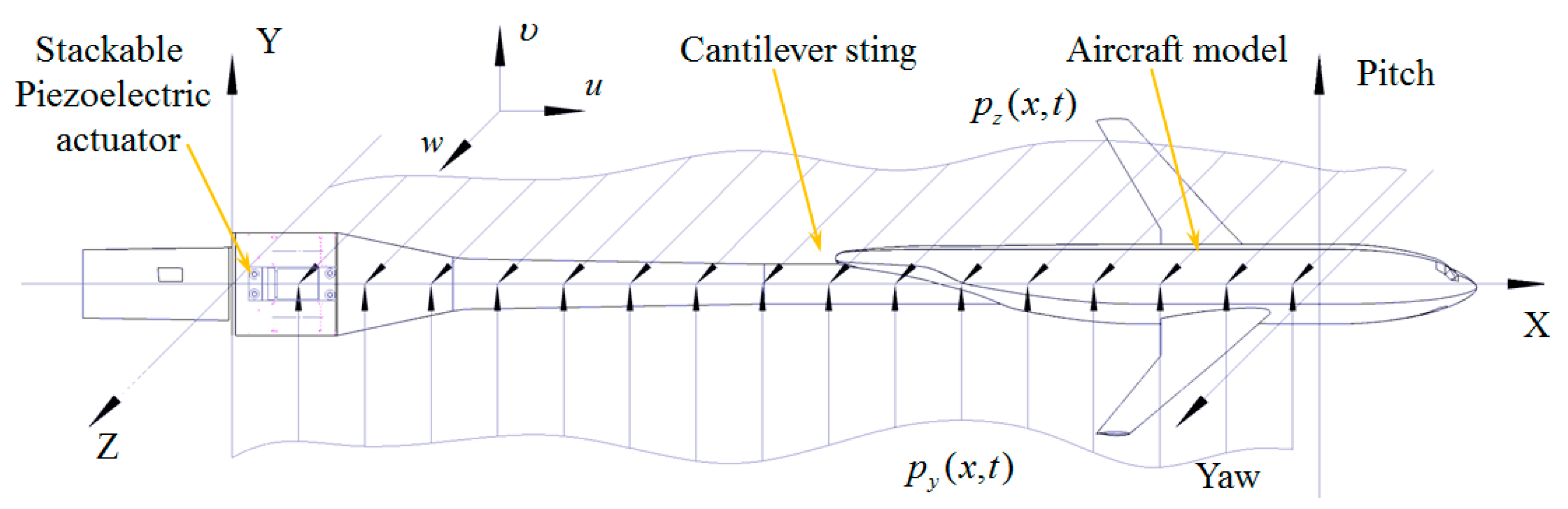
3. System Modeling
4. Multidimensional Active Vibration Control
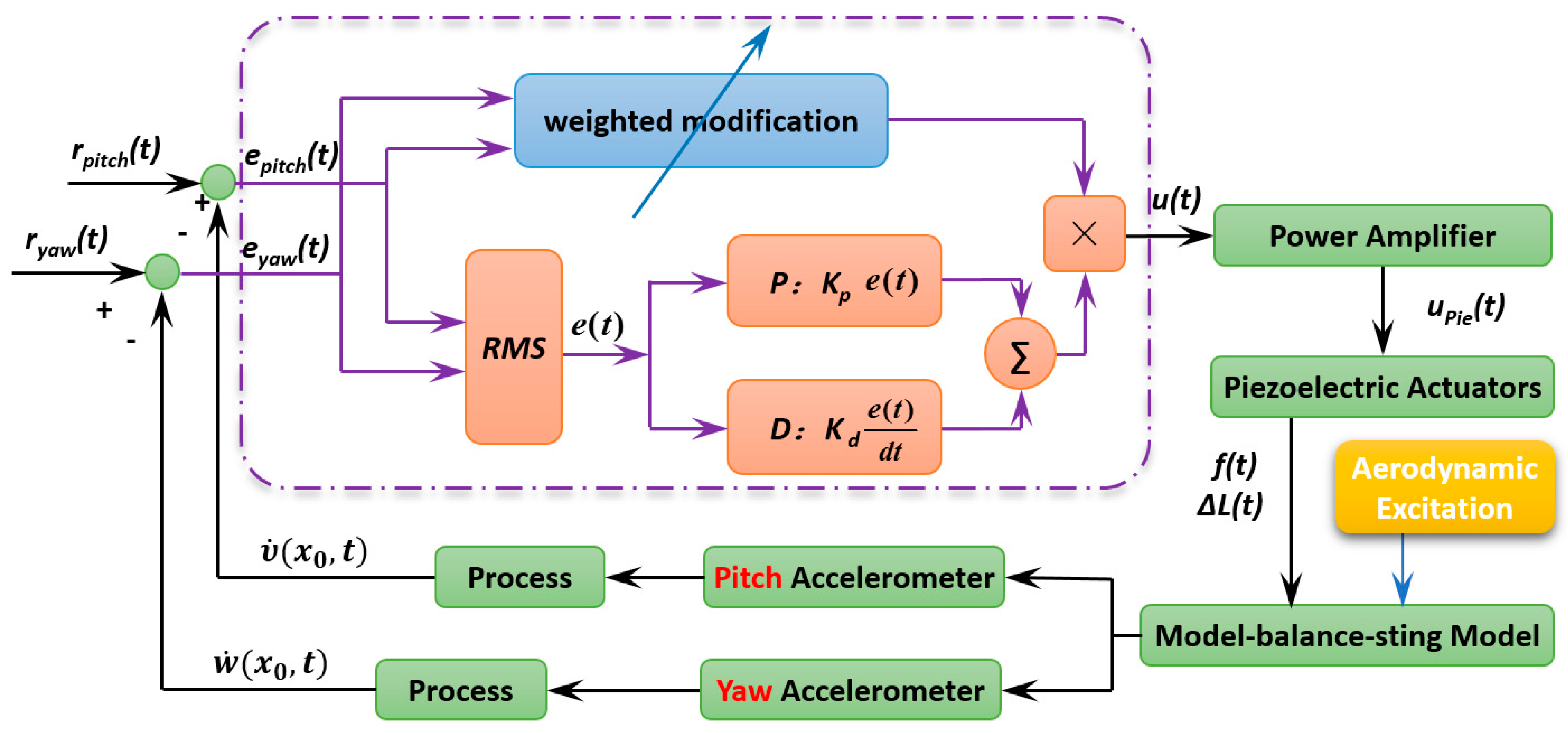
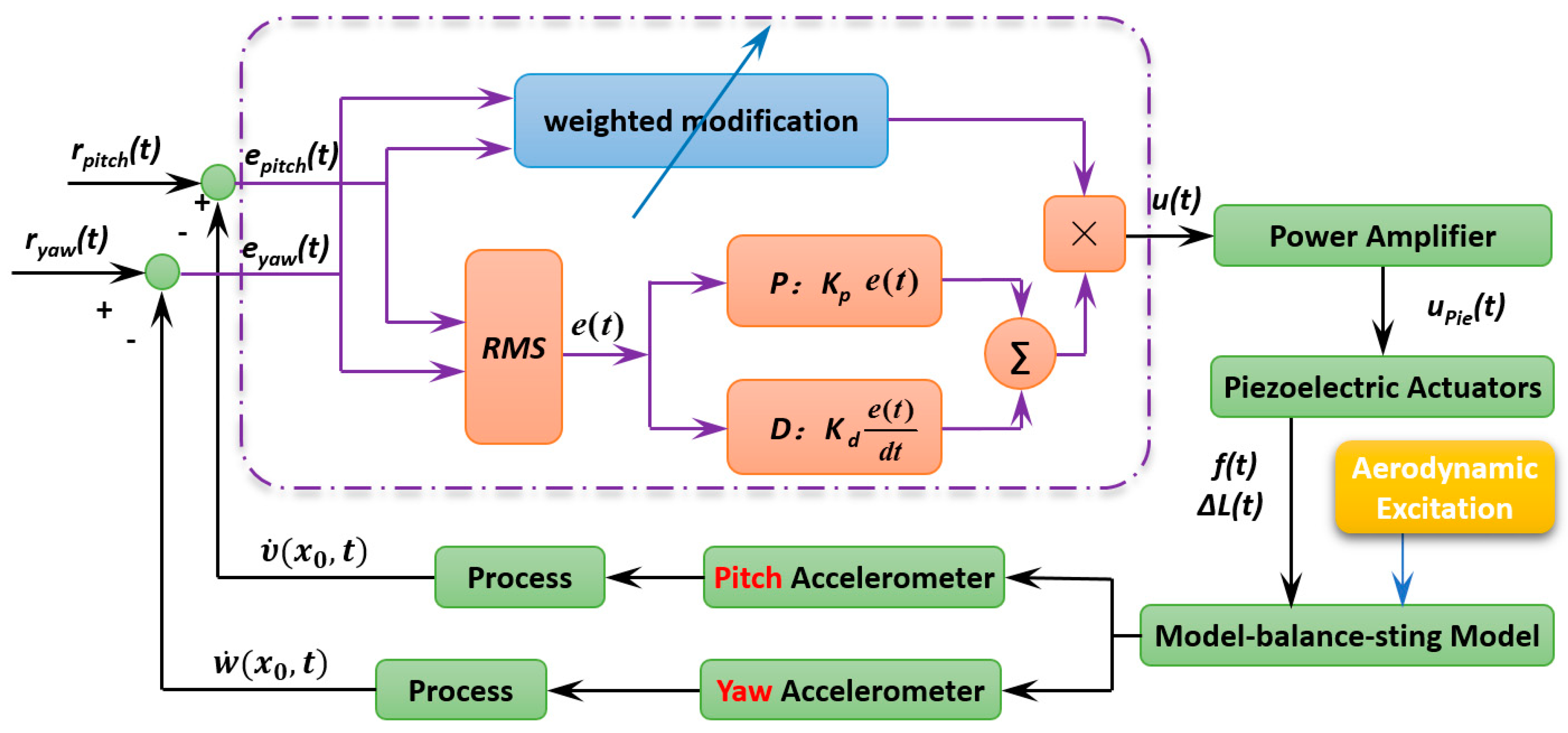
4.1. Active Control Architecture
4.2. Active Control Analysis
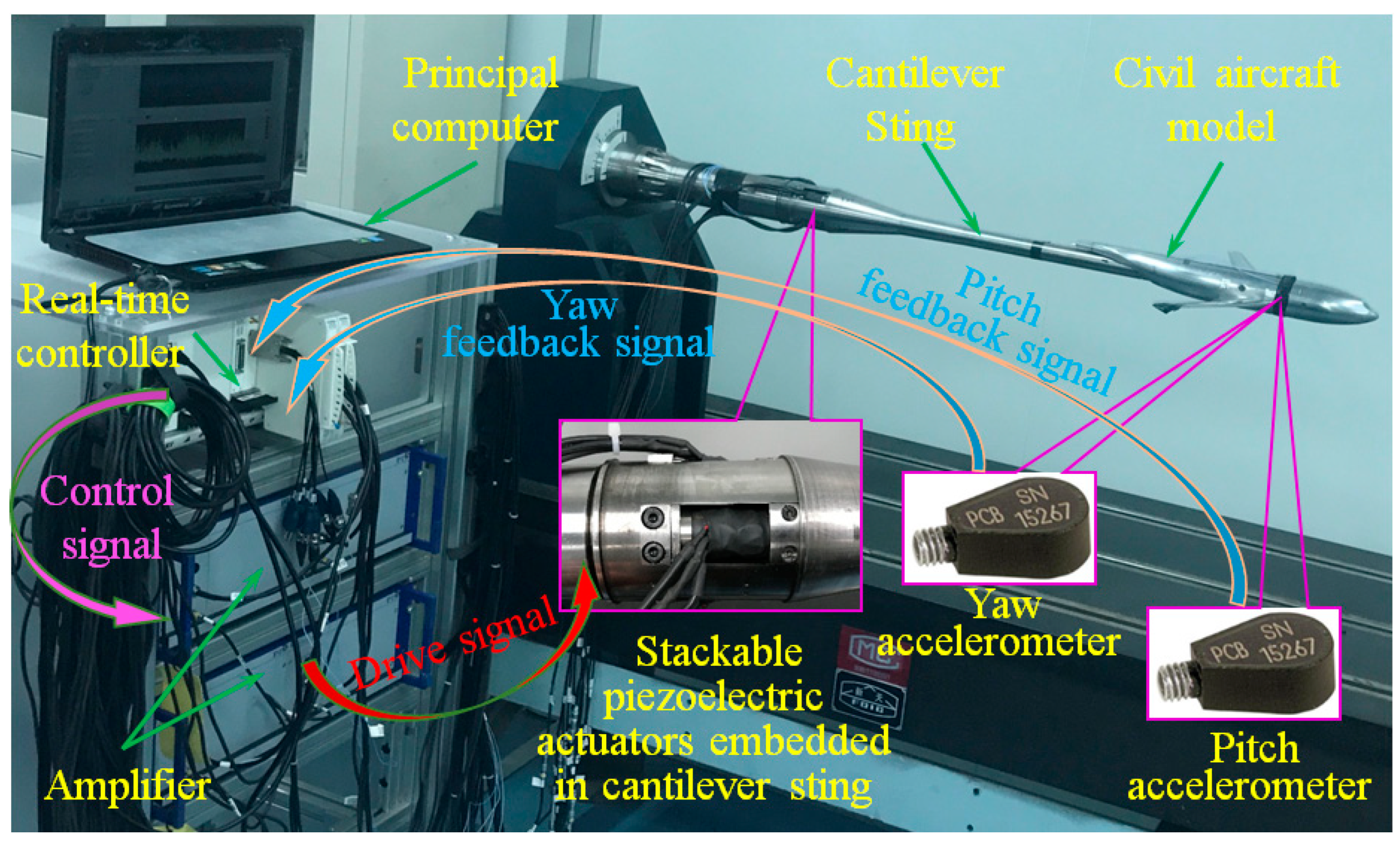
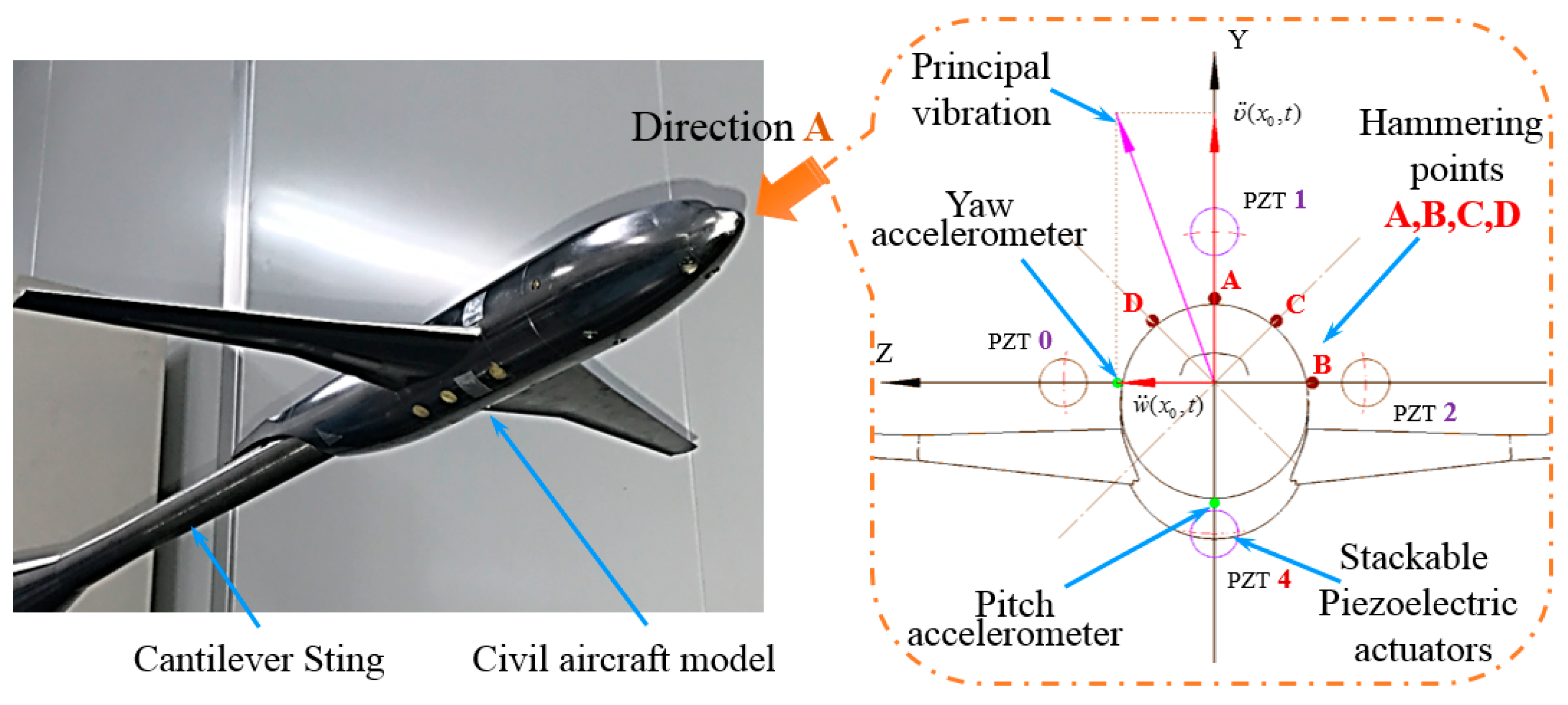
5. Verification Experiments in Lab and Wind Tunnel
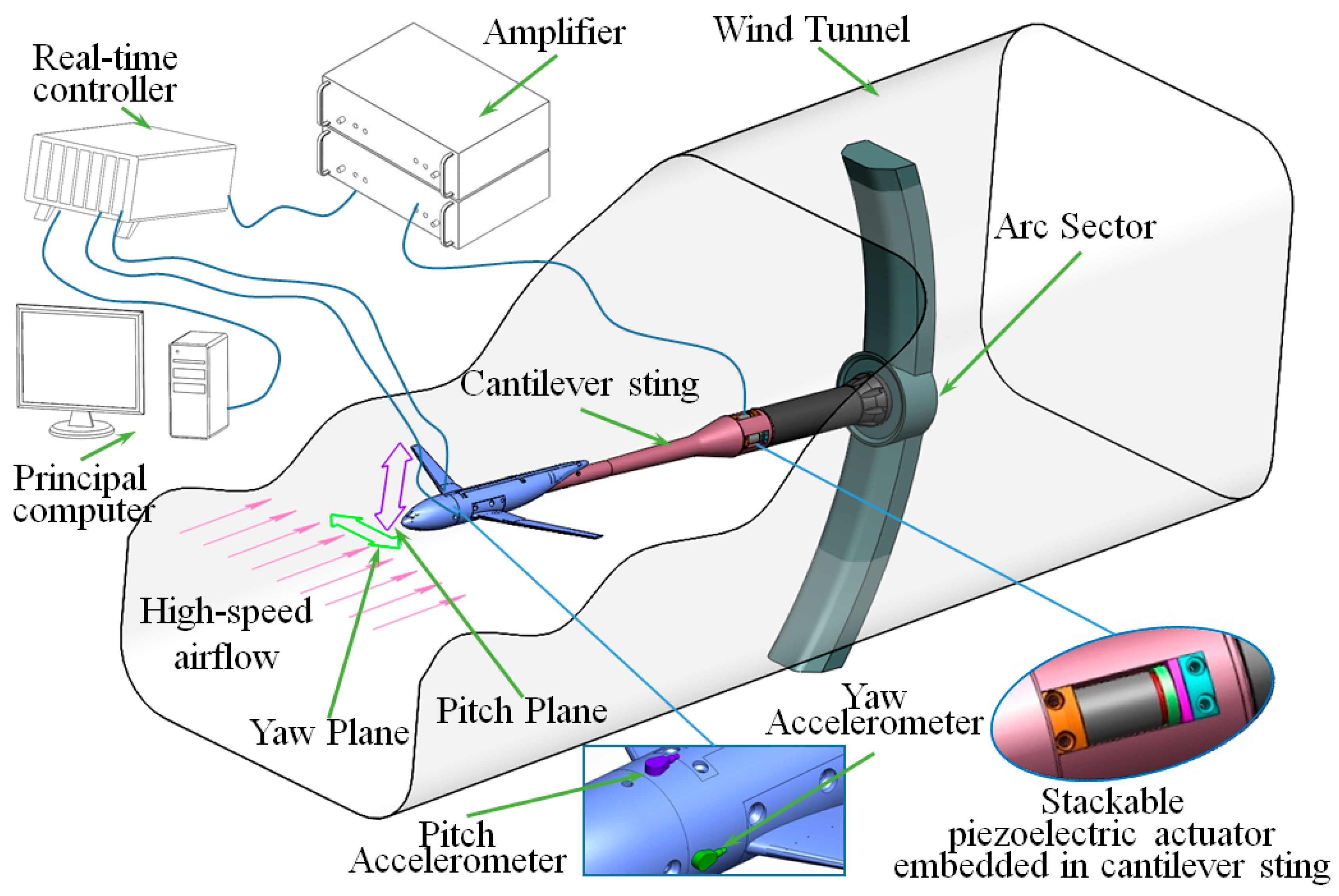
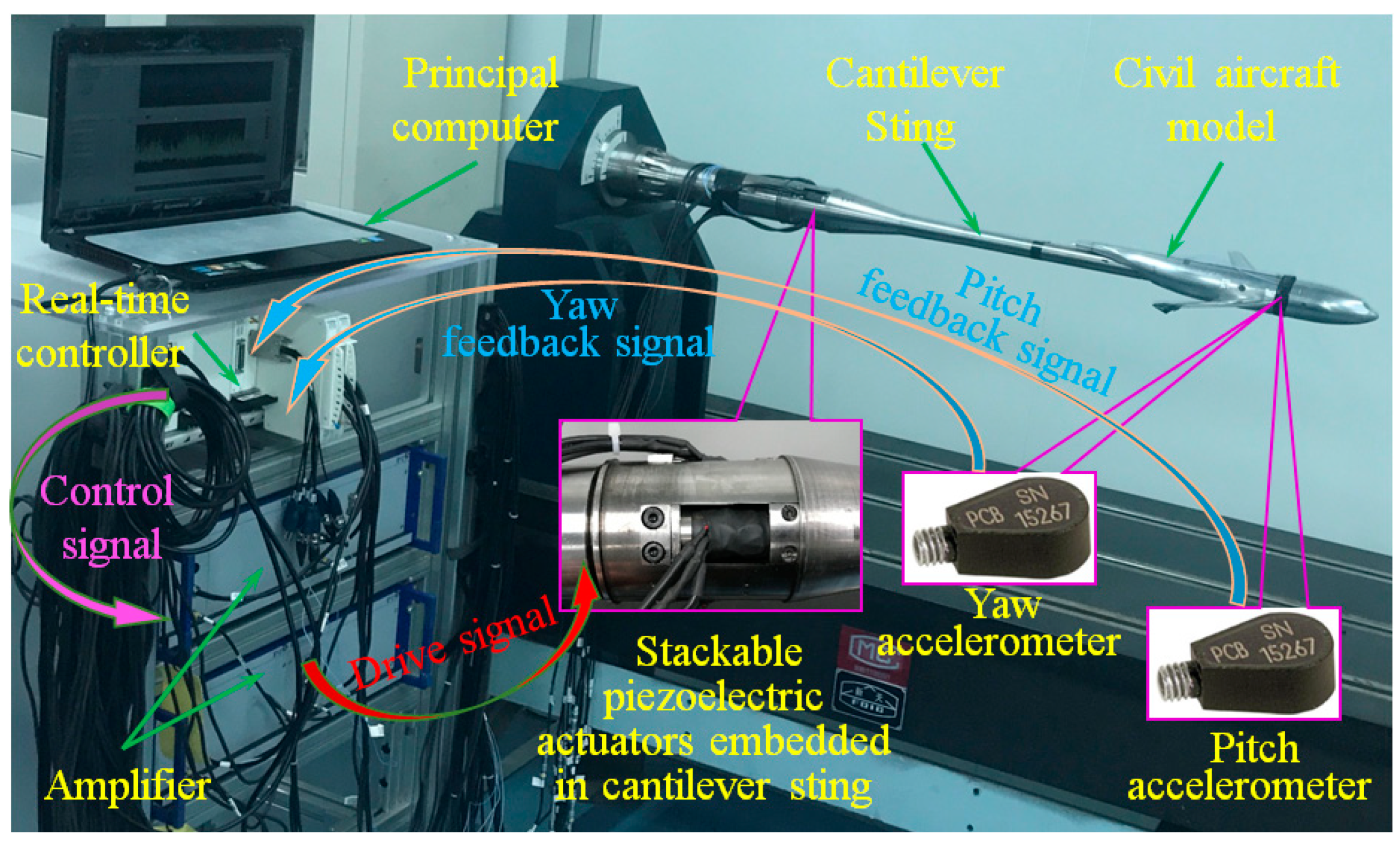
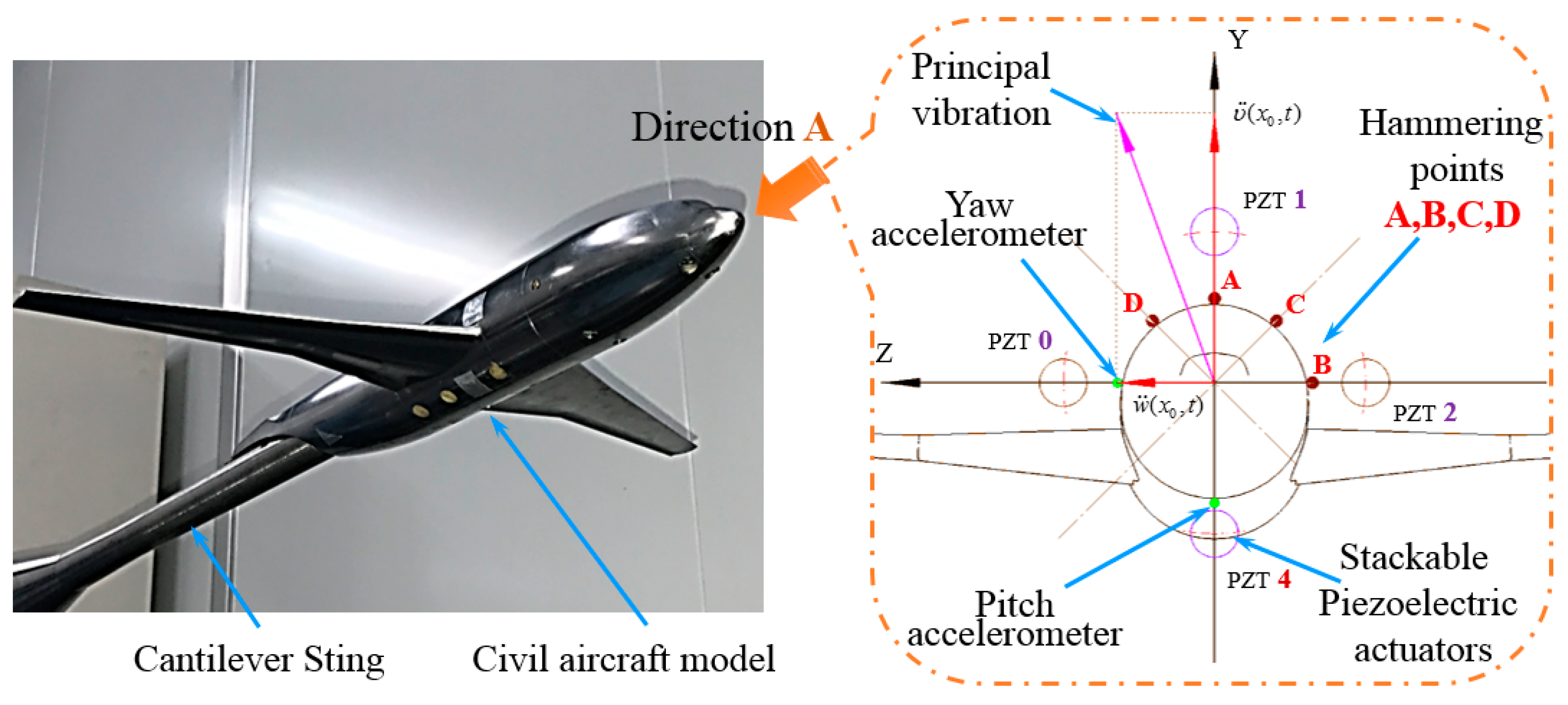
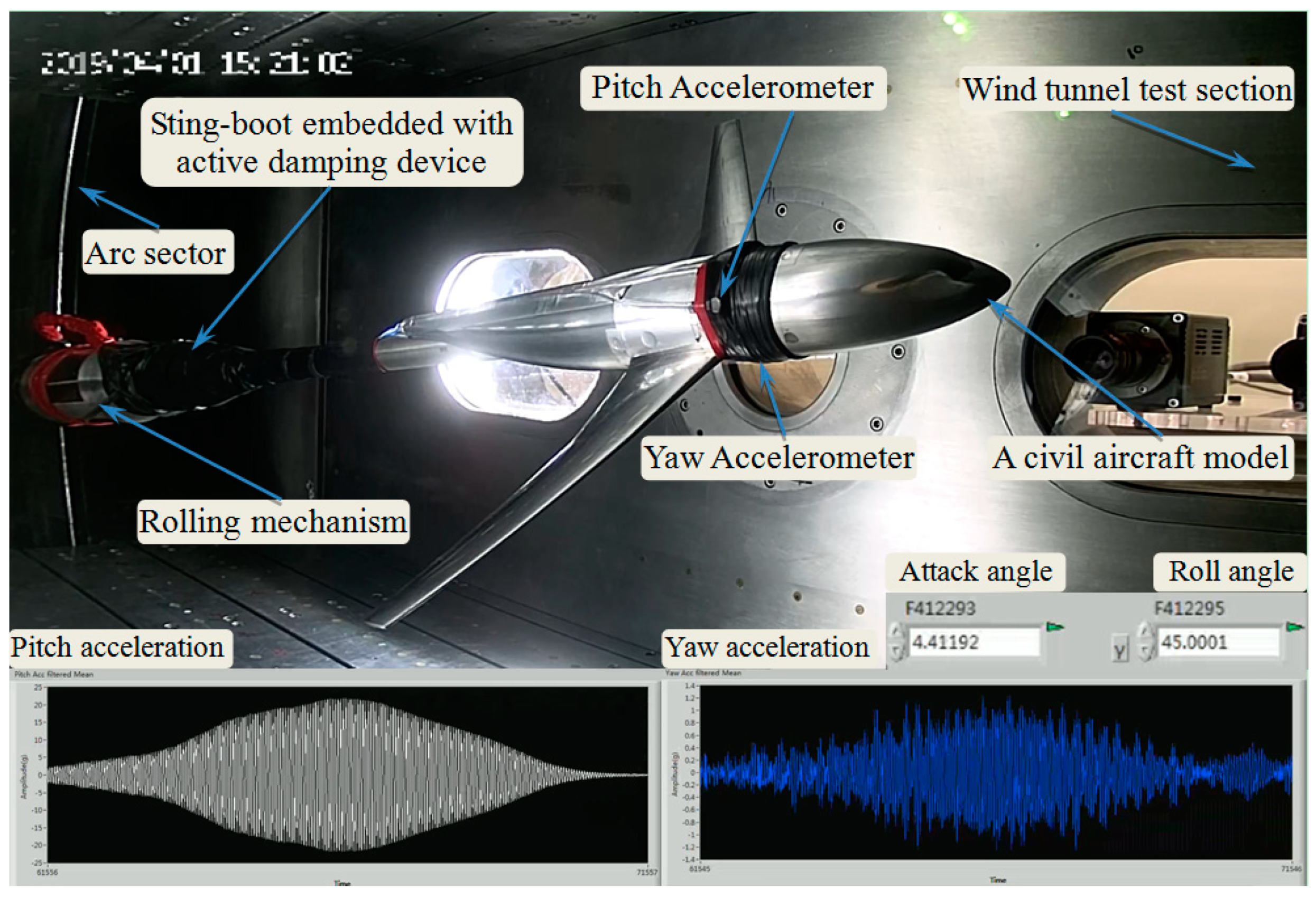
5.1. Experimental System
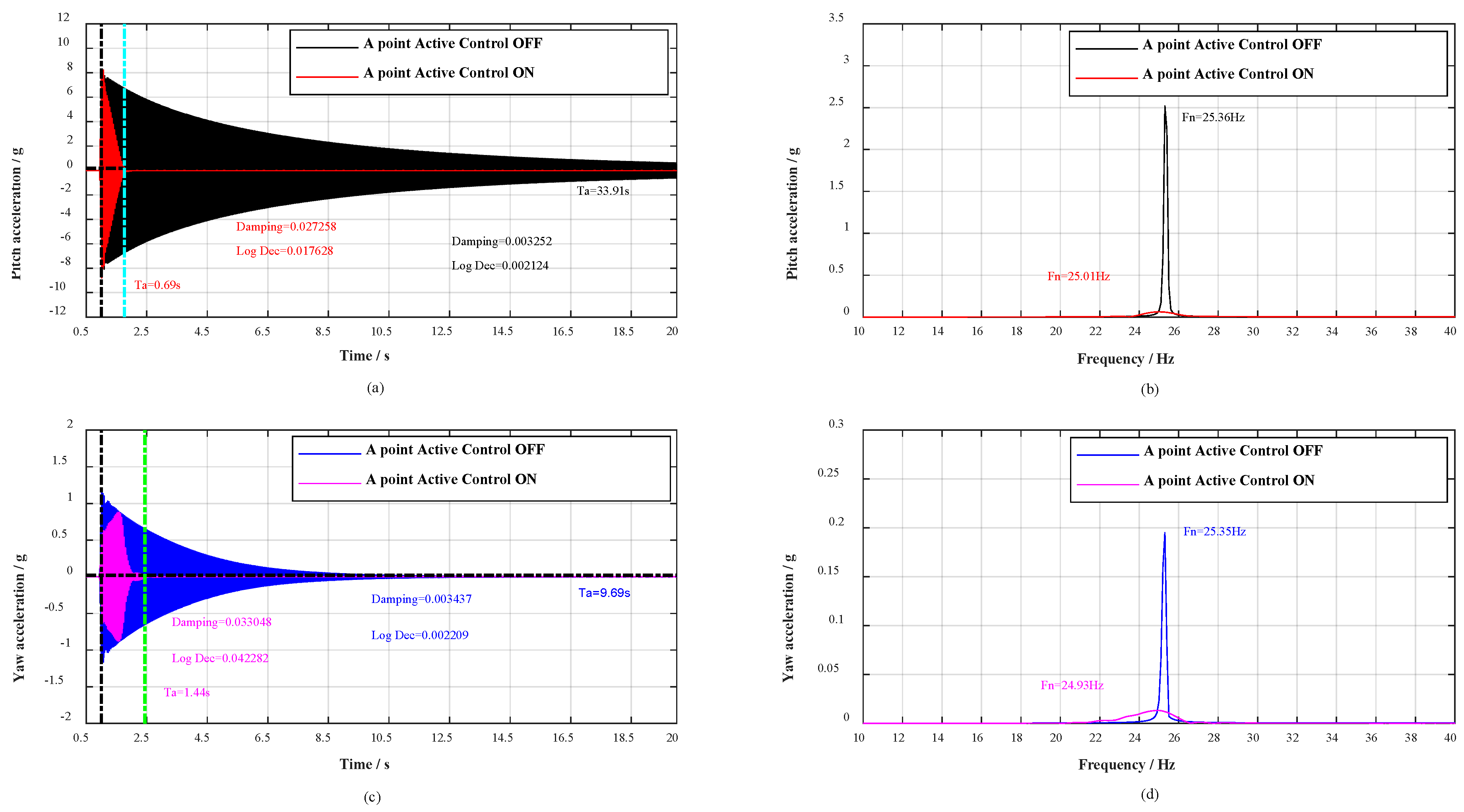
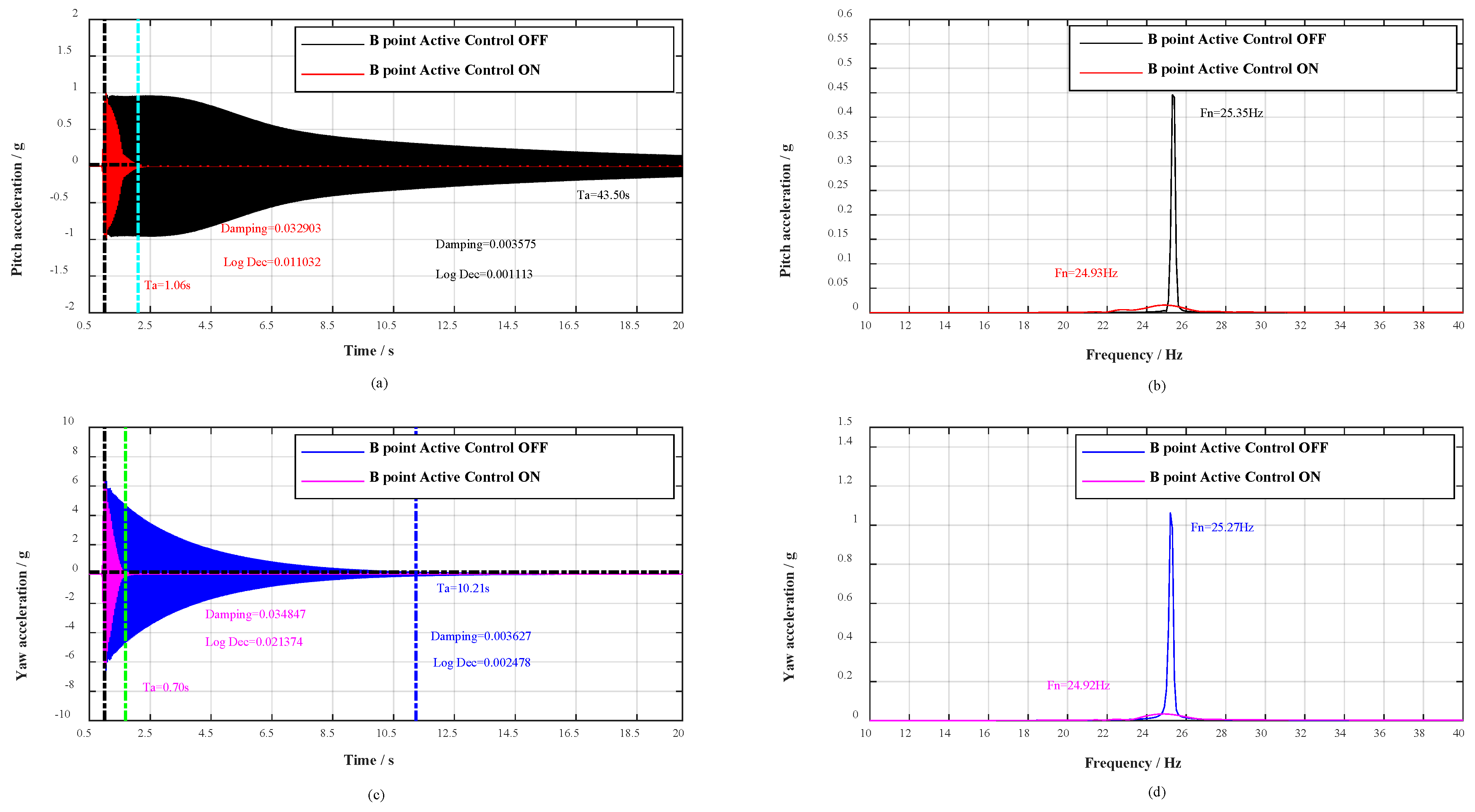
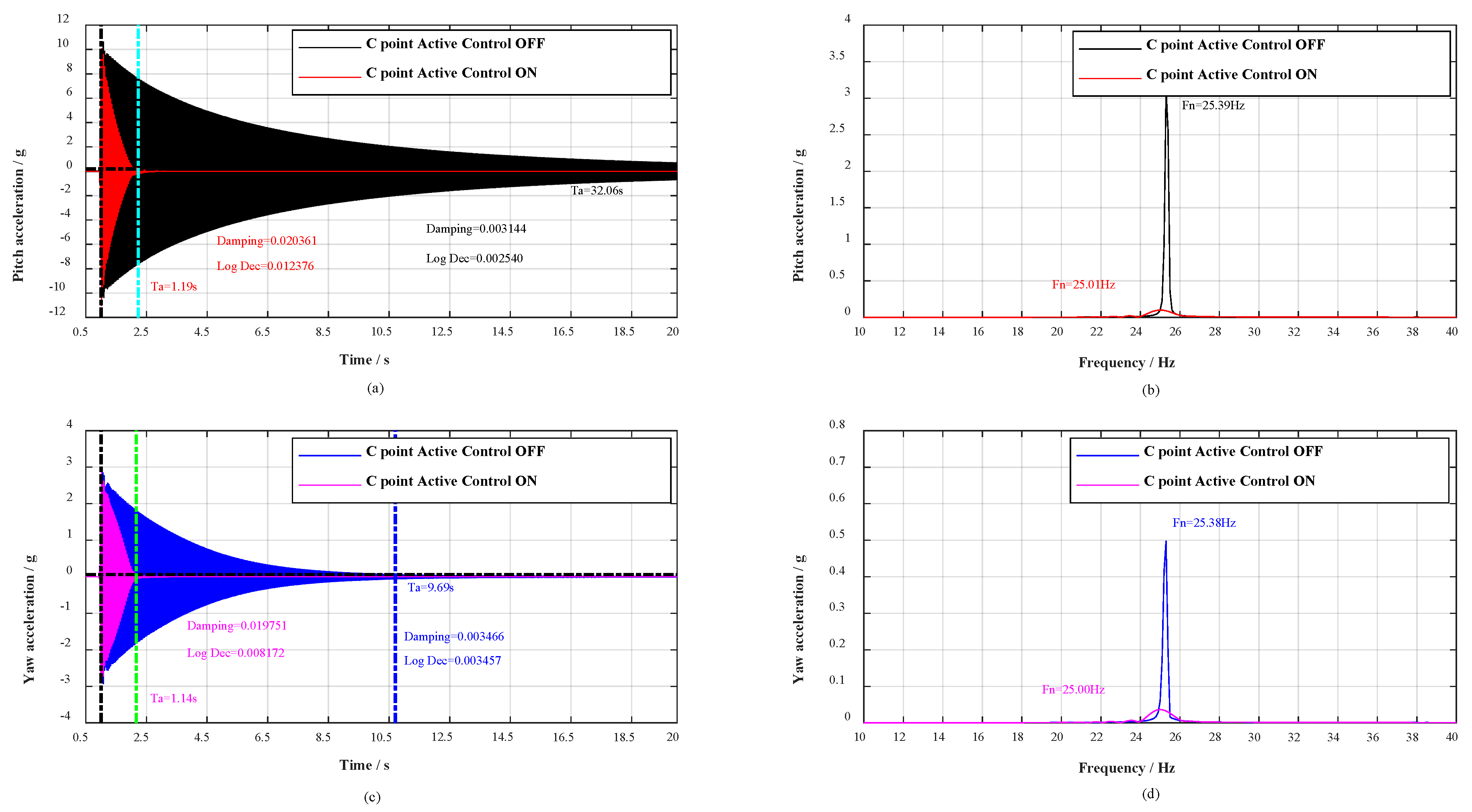
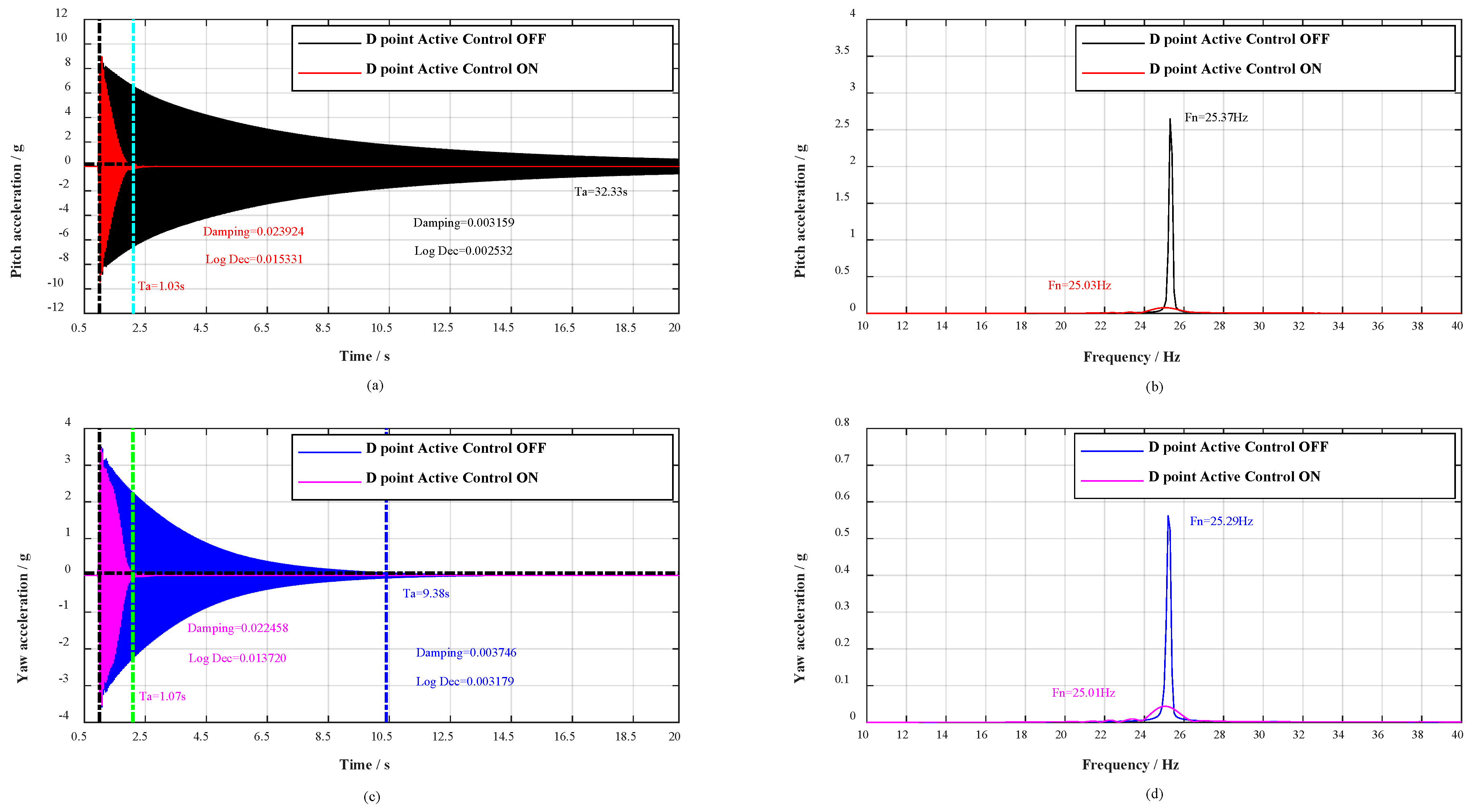
5.2. Impulse Verification Experiments in Lab
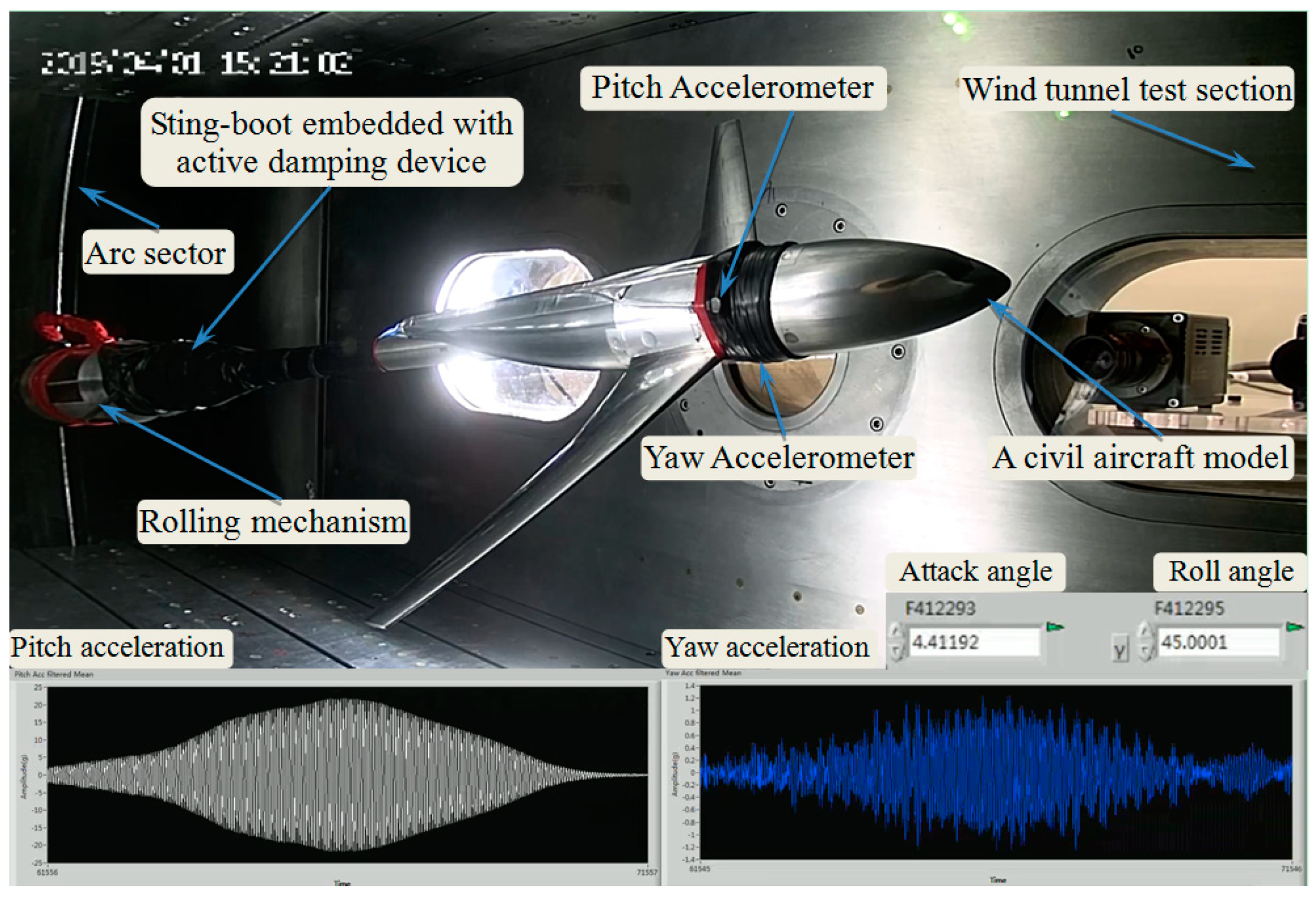
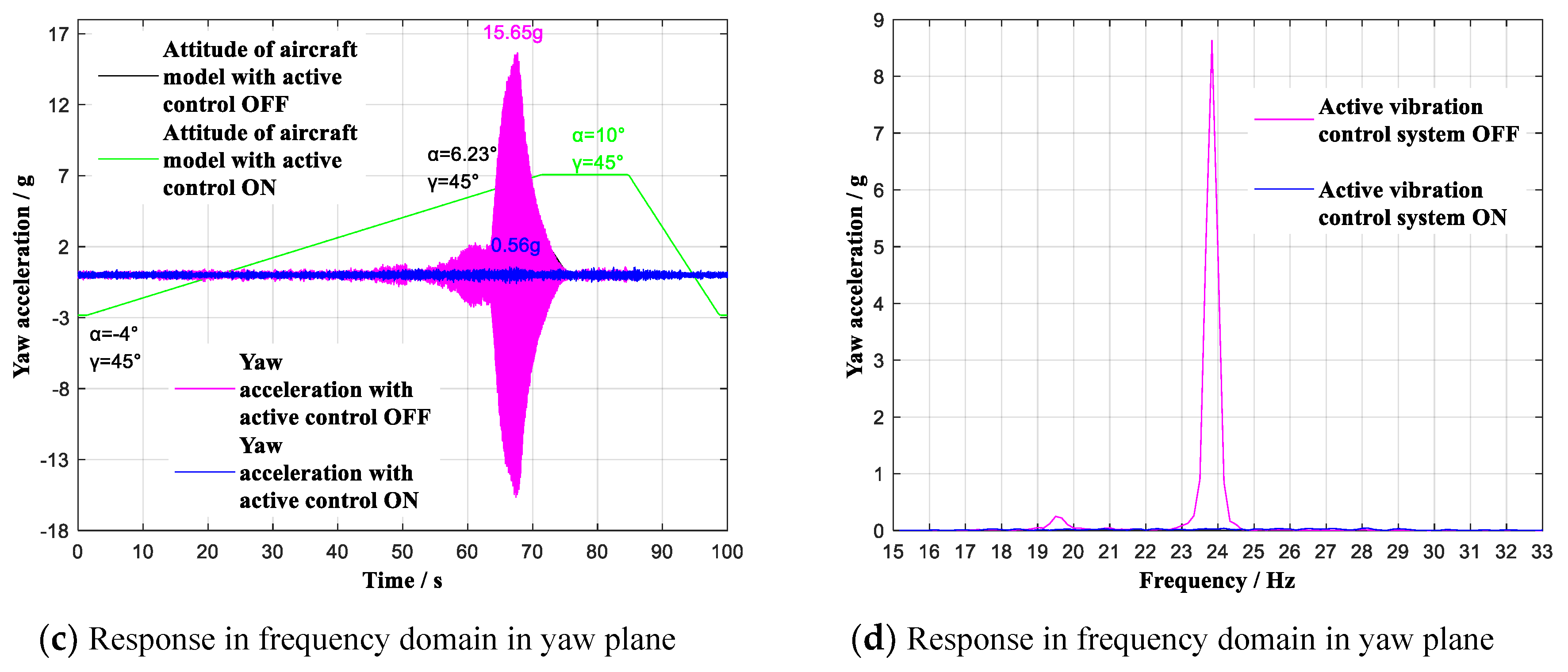
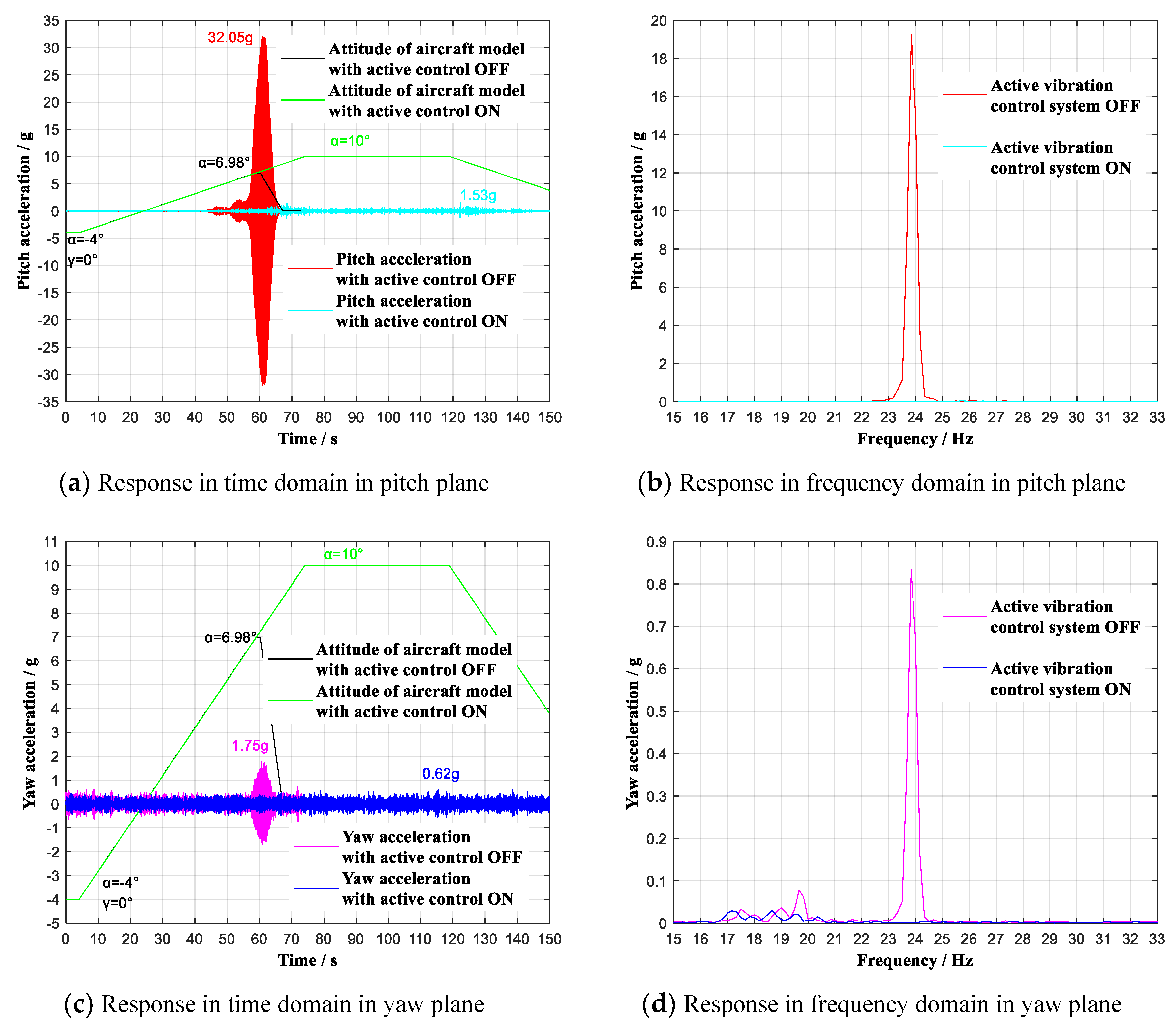
5.3. Verification Experiments in Wind Tunnel
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Balakrishna, S.; Heather, H.; Butler, D.H.; White, R. Development of a Wind Tunnel Active Vibration Reduction System; Report No.: AIAA-2007-961; AIAA: Reston, VA, USA, 2007. [Google Scholar]
- Fehren, H.; Gnauert, U.; Wimmel, R.; Refer, G. Validation Testing with the Active Damping System in the European Transonic Wind Tunnel; Report No.: AIAA-2001-0610; AIAA: Reston, VA, USA, 2001. [Google Scholar]
- Young, C.P.J.; Popernack, T.G.; Gloss, B.B. National Transonic Facility Model and Model Support Vibration Problems; Report No.: AIAA-90-1416; AIAA: Reston, VA, USA, 1990. [Google Scholar]
- Buehrle, R.D.; Young, C.P.J.; Balakrishna, S.; Kilgore, W.A. Experimental Study of Dynamic Interaction between Model Support Structure and a High Speed Research Model in the National Transonic Facility; Report No.: AIAA-94-1623-CP; AIAA: Reston, VA, USA, 1994. [Google Scholar]
- Gorbachev, N.A.; Gorbushin, A.R.; Krapivina, E.A.; Sudakova, I.A. Use of accelerometers for measurement of pitch and bank angles in an aerodynamic experiment. Meas. Tech. 2012, 55, 883–889. [Google Scholar] [CrossRef]
- Post, M.L.; Thomas, C.C. Separation control on high angle of attack airfoil using plasma actuators. AIAA J. 2004, 42, 2177–2184. [Google Scholar] [CrossRef]
- Presas, A.; Luo, Y.; Wang, Z.; Valentin, D.; Egusquiza, M. A review of PZT patches applications in submerged systems. Sensors 2018, 18, 2251. [Google Scholar] [CrossRef] [PubMed]
- Igoe, W.B.; Capone, F.J. Reduction of Wind Tunnel Model Vibration by Means of a Tuned Damped Vibration Absorber Installed in a Model; NASA Technical Memorandum: NASATMX-1606; NASA Langley Research Center: Washington, DC, USA, July 1968. [Google Scholar]
- Schimanski, D.; Quest, J. Flight Reynolds Number Testing: The European Project FLIRET; Report No.: AIAA-2009-422; AIAA: Reston, VA, USA, 2009. [Google Scholar]
- You, Y.H.; Jung, S.N.; Kim, C.J. Optimal deployment schedule of an active twist rotor for performance enhancement and vibration reduction in high-speed flights. Chin. J. Aeronaut. 2017, 30, 1–20. [Google Scholar] [CrossRef]
- Bi, Y.; Xie, C.; An, C.; Yang, C. Gust load alleviation wind tunnel tests of alarge-aspect-ratio flexible wing with piezoelectric control. Chin. J. Aeronaut. 2017, 30, 292–309. [Google Scholar] [CrossRef]
- Hefer, G. ETW—A facility for high Reynolds number testing. Fluid Mech. Appl. 2003, 73, 157–164. [Google Scholar]
- Schimanski, D.; Hefer, G. Recent Aspects of High Reynolds Number Data Quality and Capabilities at the European Transonic Wind Tunnel; Report No.: AIAA-00-0292; AIAA: Reston, VA, USA, 2000. [Google Scholar]
- Goodliff, S.L.; Jones, G.S.; Butler, D.H.; Balakrishna, S. Force Measurement Improvements to the National Transonic Facility Sidewall Model Support System; Report No.: AIAA-2016-0648; AIAA: Reston, VA, USA, 2016. [Google Scholar]
- Acheson, M.; Balakrishna, S. Effects of Active Sting Damping on Common Research Model Data Quality; Report No.: AIAA-2011-878; AIAA: Reston, VA, USA, 2011. [Google Scholar]
- Balakrishna, S.; Butler, D.H.; White, R.; Kilgore, W.A. Active Damping of Sting Vibrations in Transonic Wind Tunnel Testing; Report No.: AIAA-2008-840; AIAA: Reston, VA, USA, 2008. [Google Scholar]
- Rivers, M.B.; Balakrishna, S. NASA Common Research Model Test Envelope Extension with Active Sting Damping at NTF; Report No.: AIAA-2014-3135; AIAA: Reston, VA, USA, 2014. [Google Scholar]
- Song, Z.G.; Li, F.M. Active aeroelastic flutter analysis and vibration control of supersonic beams using the piezoelectric actuator/sensor pairs. Smart Mater. Struct. 2011, 20, 055013. [Google Scholar] [CrossRef]
- Shen, X.; Chen, Y.; Zhang, L. Development and validation research of an active sting damper in a transonic acoustic wind tunnel. In Proceedings of the 15th International Bhurban Conference Applied Sciences and Technology, Islamabad, Pakistan, 9–13 January 2018; pp. 172–177. [Google Scholar]
- Shen, X.; Dai, Y.; Chen, M.; Zhang, L.; Yu, L. Active Vibration Control of the Sting Used in Wind Tunnel: Comparison of Three Control Algorithms. Shock Vib. 2018, 2018, 1905049. [Google Scholar] [CrossRef]
- Chen, J.; Shen, X.; Tu, F.; Qureshi, E.M. Experimental Research on an Active Sting Damper in a Low Speed Acoustic Wind Tunnel. Shock Vib. 2014, 2014, 524351. [Google Scholar] [CrossRef]
- Yuan, T.; Li, C.; Fan, P. An Equivalent Circuit of Longitudinal Vibration for a Piezoelectric Structure with Losses. Sensors 2018, 18, 947. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Driving Voltage (V) | 0–1000 | Output Force (N) | 5500 |
| Displacement (um) | 30 | Stiffness (N/um) | 190 |
| Diameter (mm) | 16 | Capacitance (nF) | 340 |
| Length (mm) | 29 ± 0.5 | Resonant Frequency (Hz) | 36000 |
| Impulse Point | Vibration Evaluation Pitch/Yaw | Active Damper ON/OFF | Damping Ratio (Half-Power) | Damping Ratio (Log Decrement) | Spectral Attenuation | Attenuation Time | Natural Frequency |
|---|---|---|---|---|---|---|---|
| (Pitch Plane) A point | Pitch | OFF | 0.003252 | 0.002124 | 32DB | 33.91 s | 25.36 Hz |
| ON | 0.027258 | 0.017628 | 0.69 s | 25.01 Hz | |||
| Yaw | OFF | 0.003437 | 0.002209 | 23DB | 9.69 s | 25.35 Hz | |
| ON | 0.033048 | 0.042282 | 1.44 s | 24.93 Hz | |||
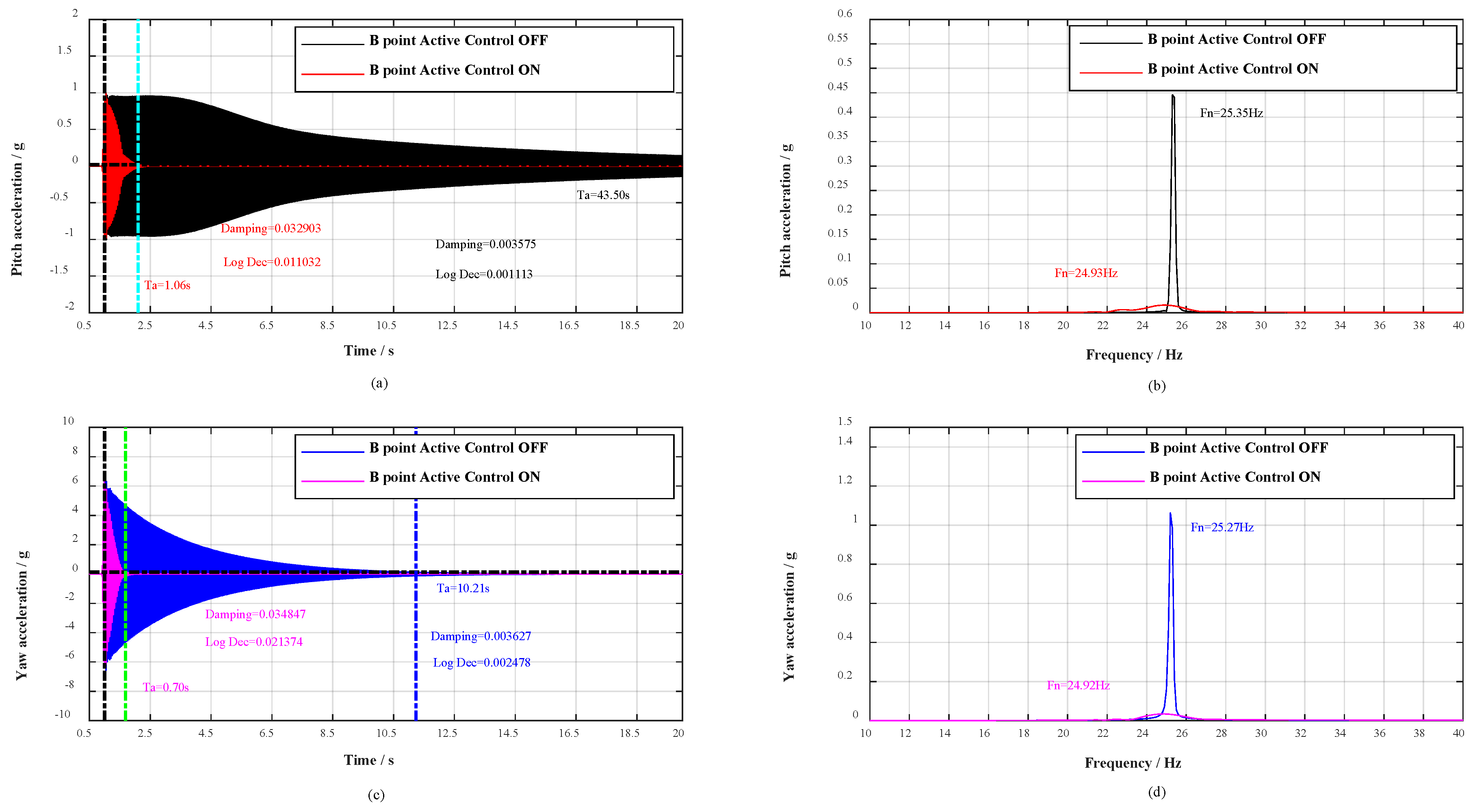
| (Yaw Plane) B point | Pitch | OFF | 0.003575 | 0.001113 | 29DB | 43.50 s | 25.35 Hz |
| ON | 0.032903 | 0.011032 | 1.06 s | 24.93 Hz | |||
| Yaw | OFF | 0.003627 | 0.002478 | 30DB | 10.21 s | 25.27 Hz | |
| ON | 0.034847 | 0.021374 | 0.70 s | 24.92 Hz | |||
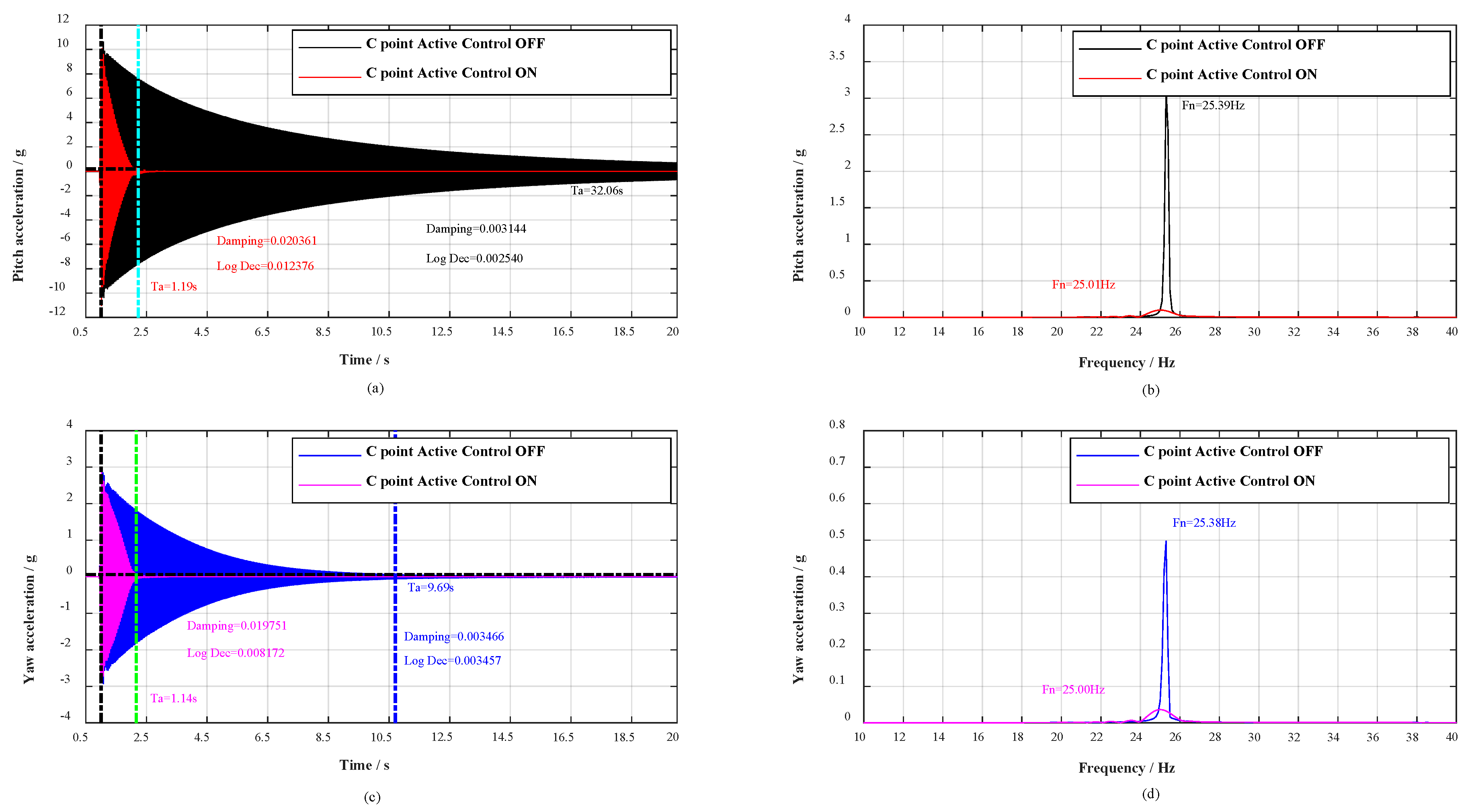
| (Random Plane) C point | Pitch | OFF | 0.003144 | 0.002540 | 30DB | 32.06 s | 25.39 Hz |
| ON | 0.020361 | 0.012376 | 1.19 s | 25.01 Hz | |||
| Yaw | OFF | 0.003457 | 0.003466 | 23DB | 9.69 s | 25.38 Hz | |
| ON | 0.019751 | 0.008172 | 1.14 s | 25.00 Hz | |||
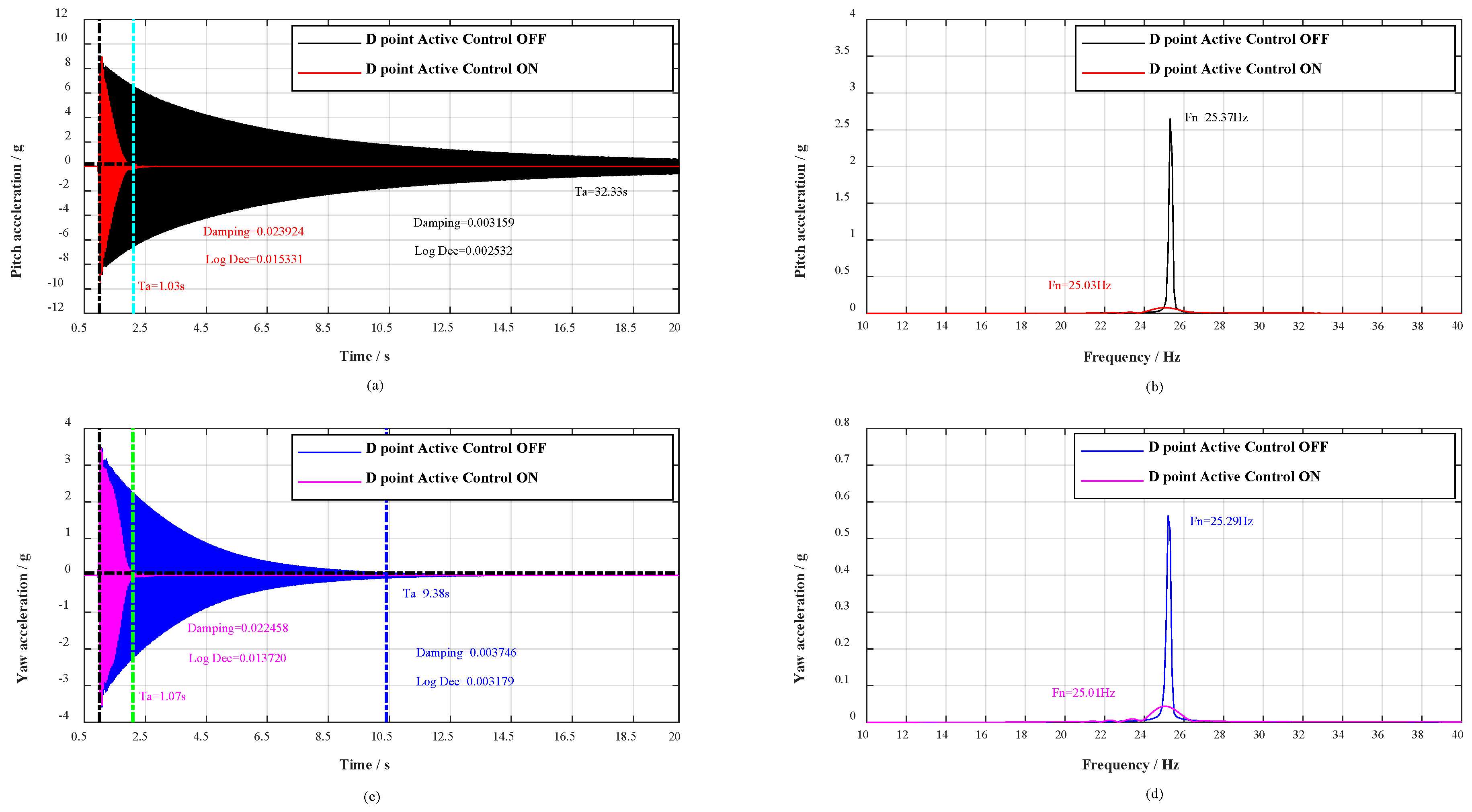
| (Random Plane) D point | Pitch | OFF | 0.003159 | 0.002532 | 31DB | 32.33 s | 25.37 Hz |
| ON | 0.023924 | 0.015331 | 1.03 s | 25.03 Hz | |||
| Yaw | OFF | 0.003746 | 0.003179 | 23DB | 9.38 s | 25.29 Hz | |
| ON | 0.022458 | 0.013720 | 1.07 s | 25.01 Hz |
| Working Conditions | Vibration Evaluation Pitch/Yaw | Active Damping ON/OFF | Spectral Attenuation | Remainder Acceleration | Improvement | ||
|---|---|---|---|---|---|---|---|
| Attack Angle α | Roll Angle γ | Wind Speed M | |||||
| −4~10° | 0° | 0.6 Ma | Pitch | OFF | 55 dB | 32.05 g | Δα = 3.02° |
| ON | 1.53 g | ||||||
| Yaw | OFF | 28 dB | 1.75 g | ||||
| ON | 0.62 g | ||||||
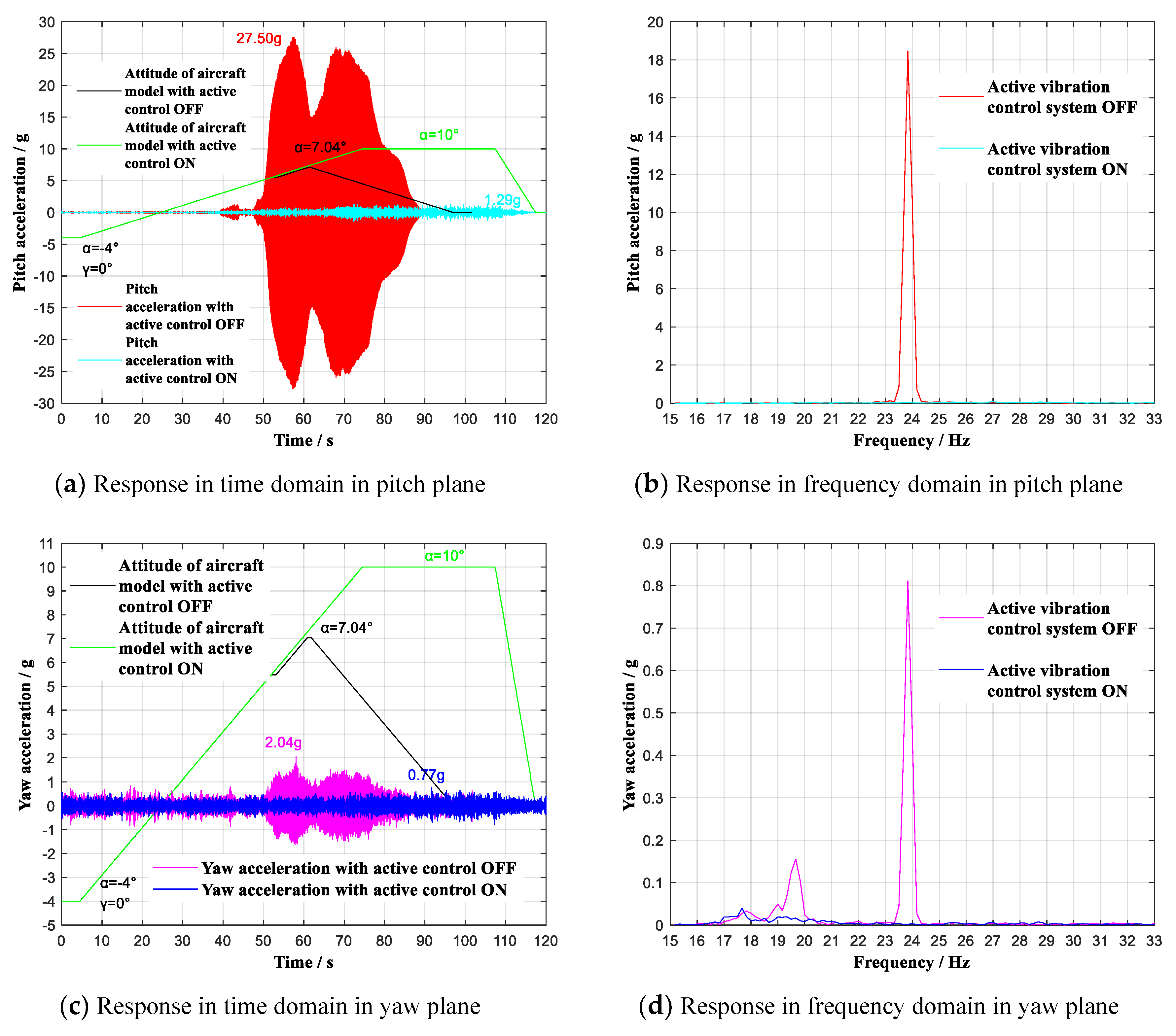
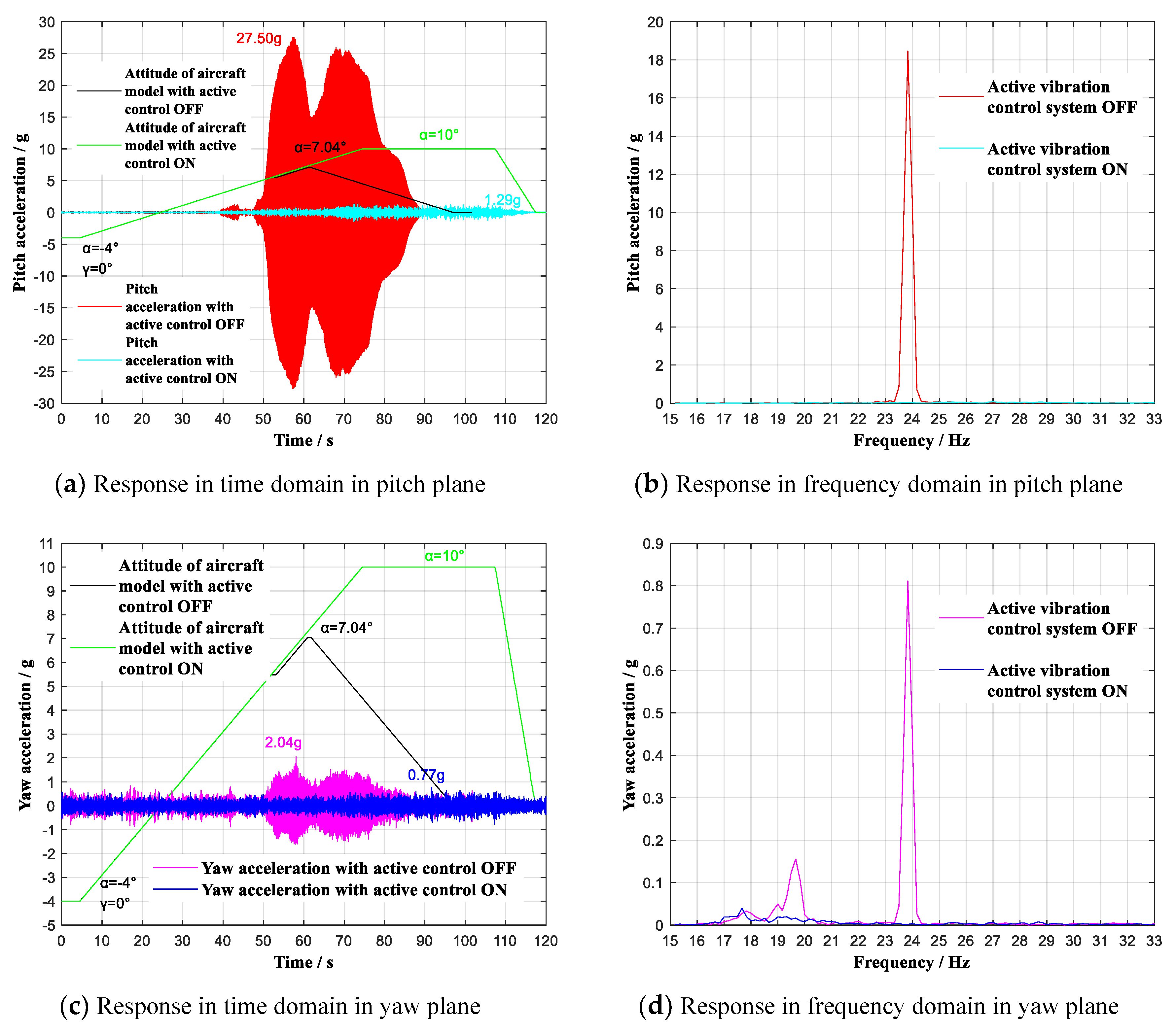
| −4~10° | 0° | 0.7 Ma | Pitch | OFF | 50 dB | 27.50 g | Δα = 2.96° |
| ON | 1.29 g | ||||||
| Yaw | OFF | 26 dB | 2.04 g | ||||
| ON | 0.77 g | ||||||
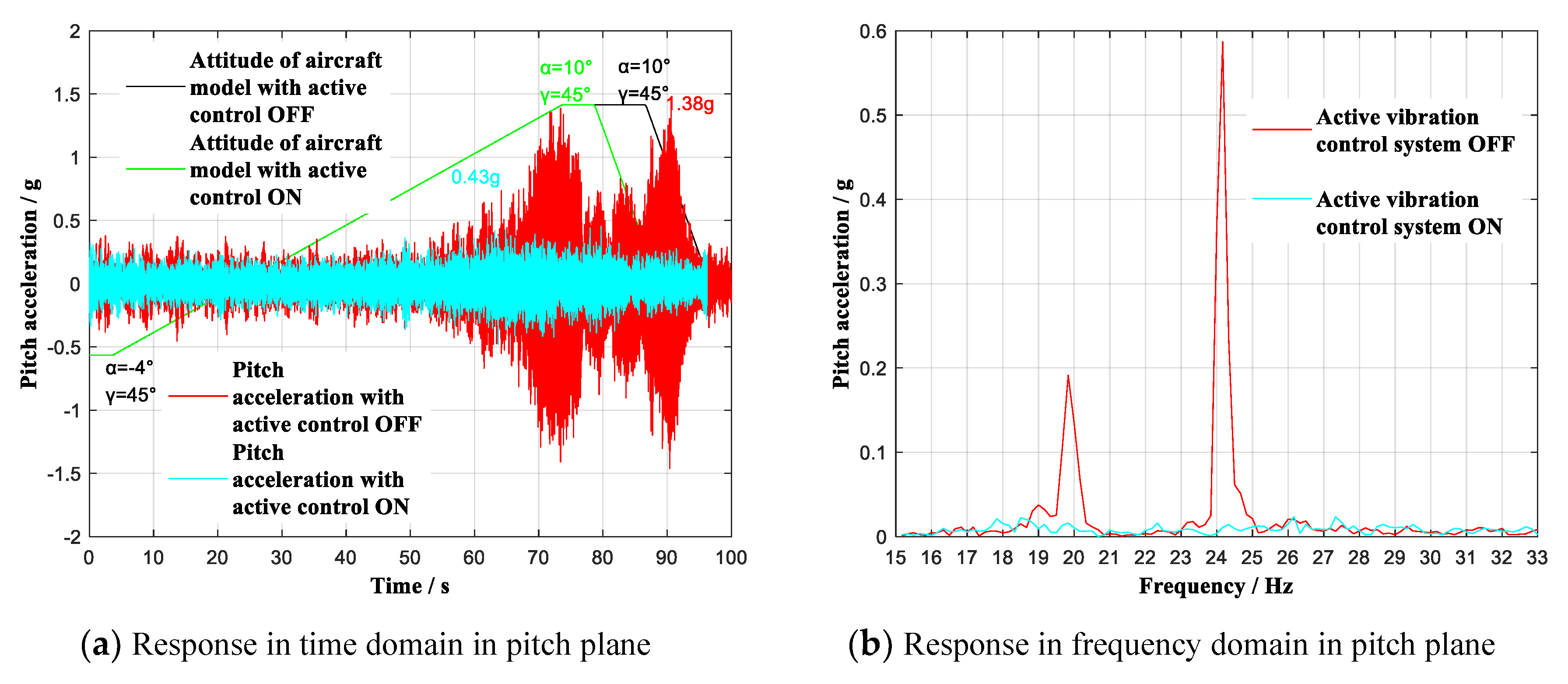
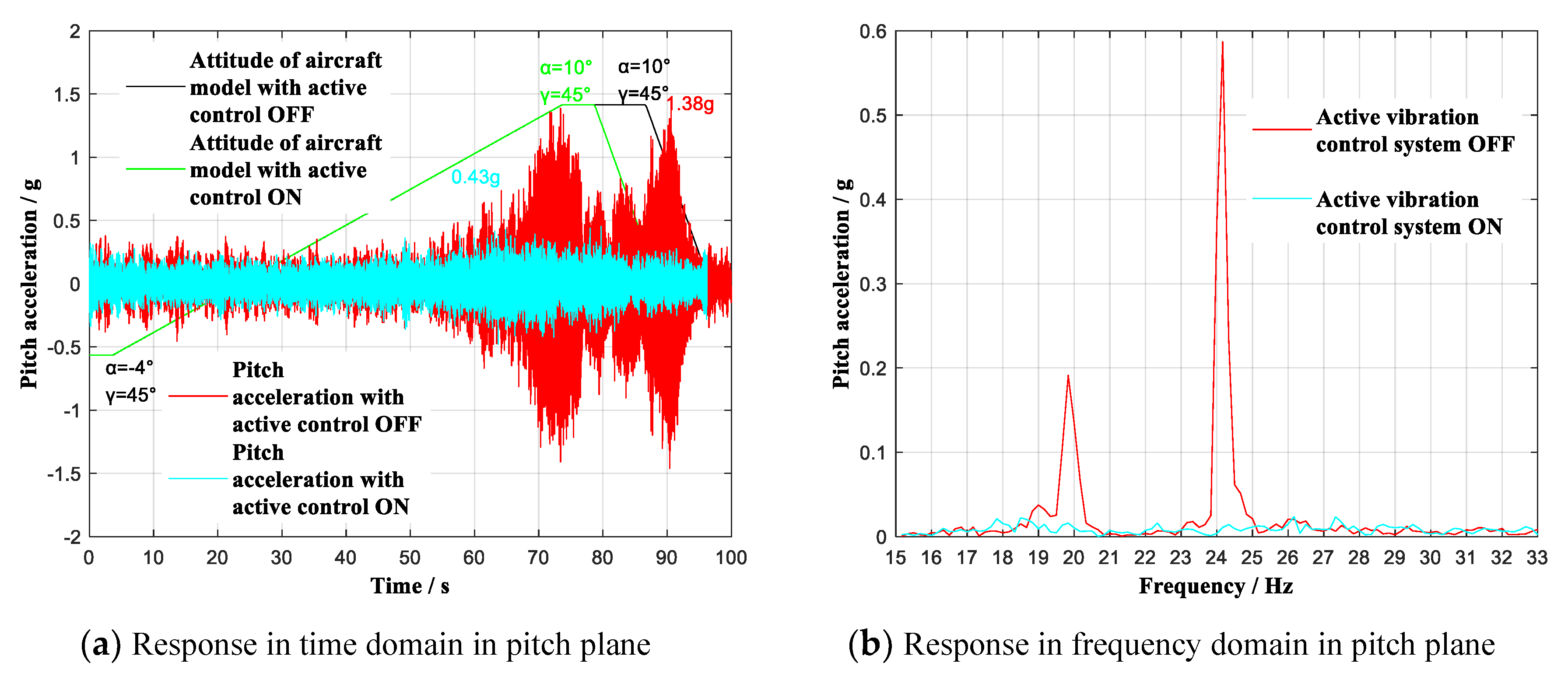
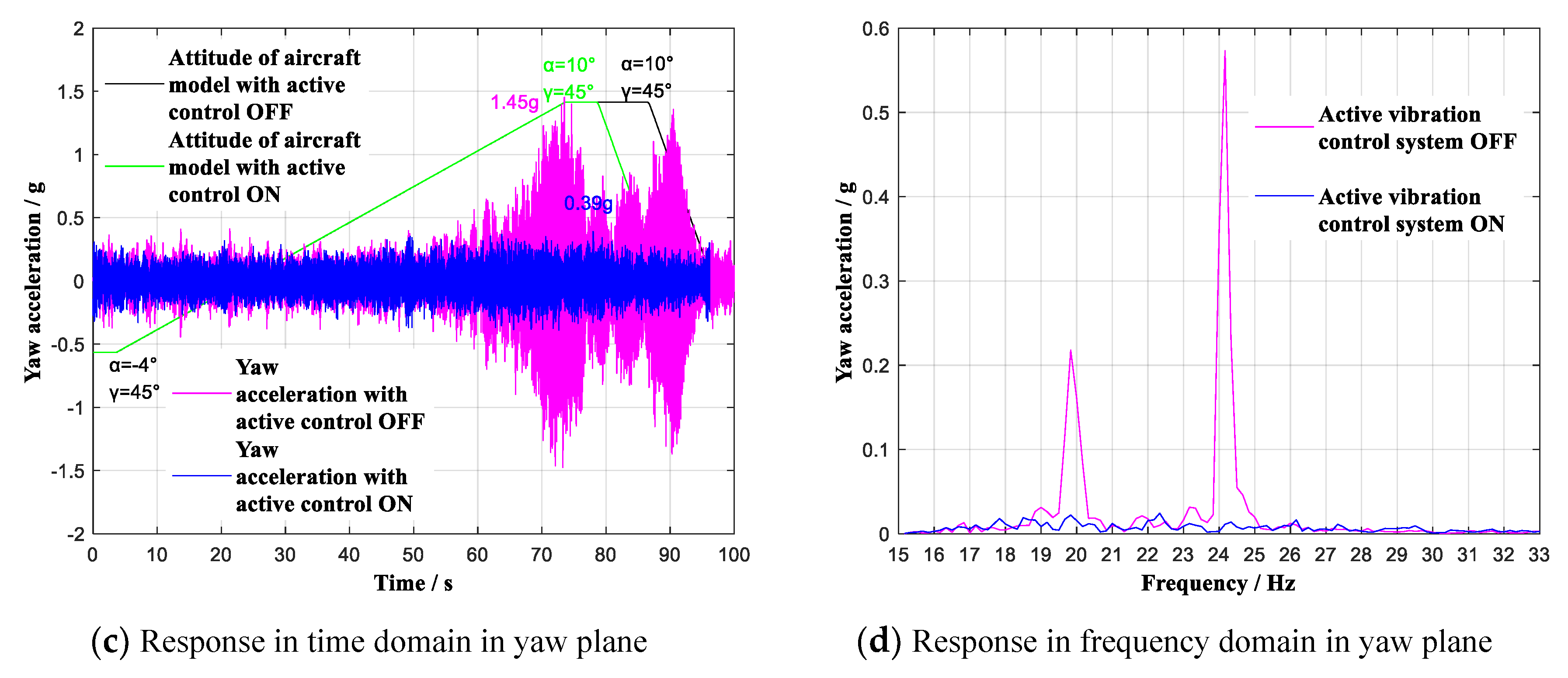
| −4~10° | 45° | 0.6 Ma | Pitch | OFF | 27 dB | 1.38 g | Δα = 0° |
| ON | 0.43 g | ||||||
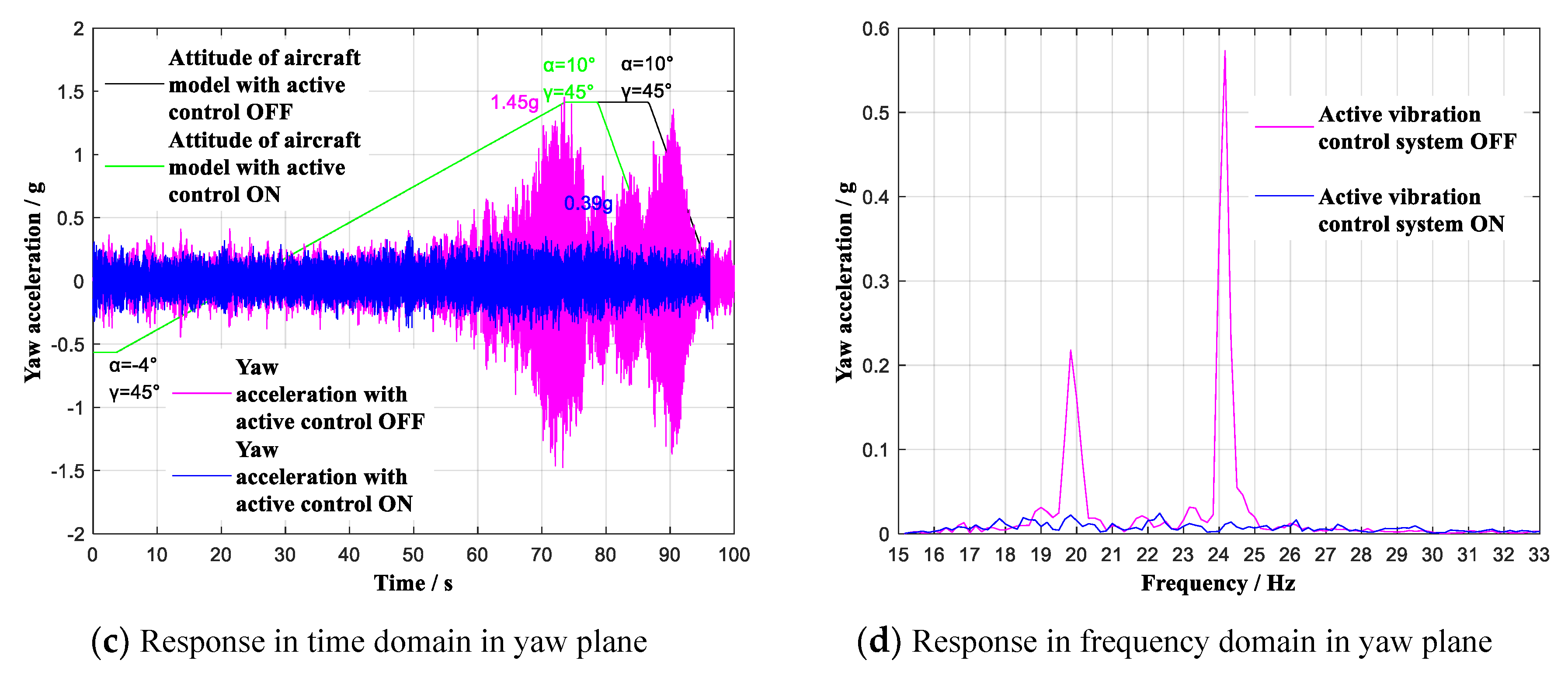
| Yaw | OFF | 26 dB | 1.45 g | ||||
| ON | 0.39 g | ||||||
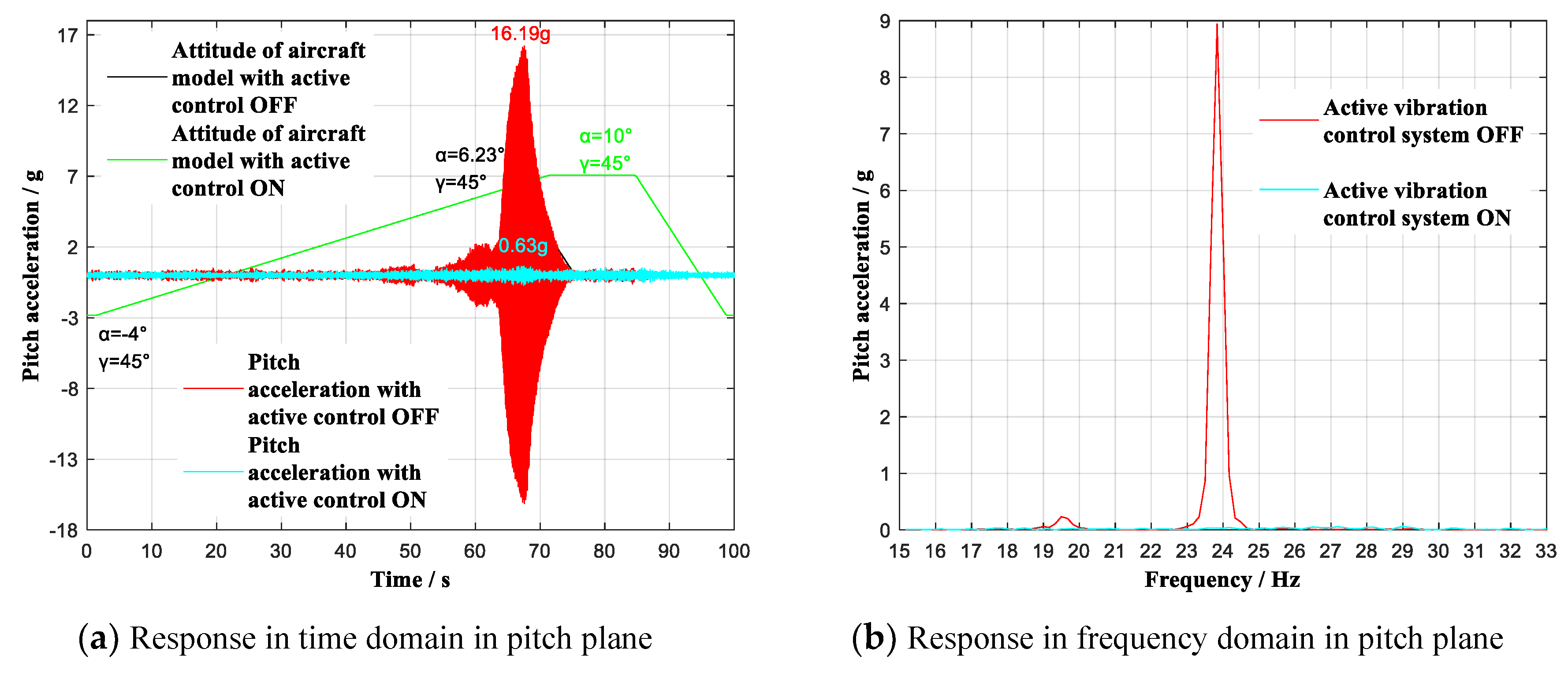
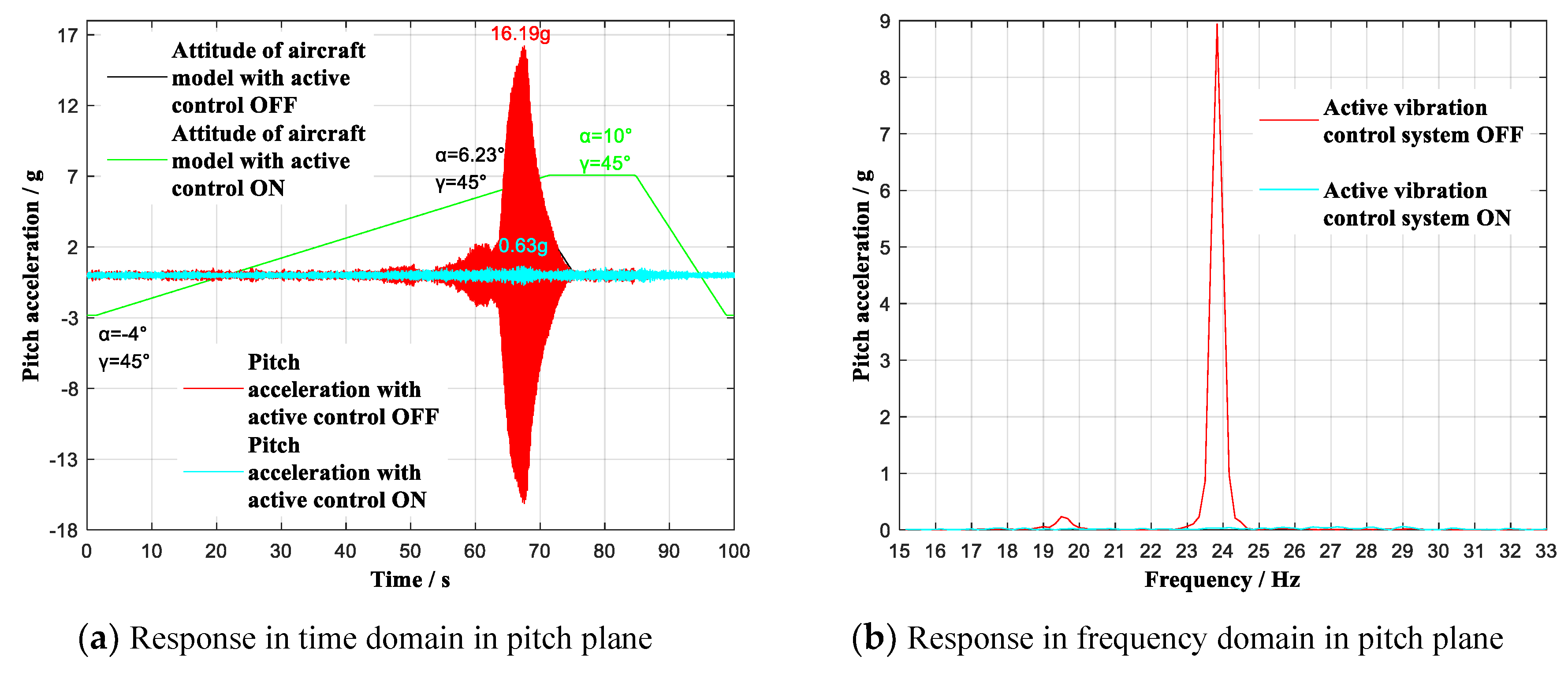
| −4~10° | 45° | 0.7 Ma | Pitch | OFF | 44 dB | 16.19 g | Δα = 3.77° |
| ON | 0.63 g | ||||||
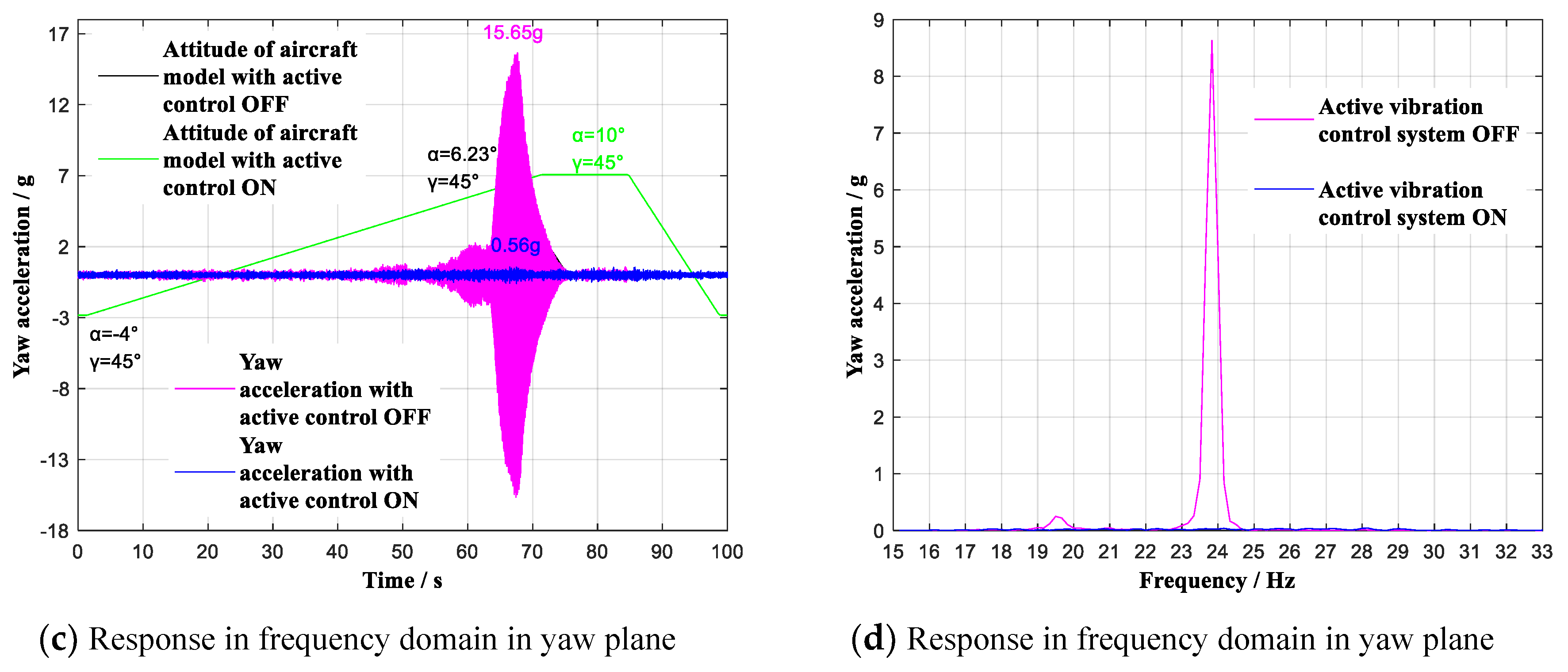
| Yaw | OFF | 48 dB | 15.65 g | ||||
| ON | 0.56 g | ||||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, M.; Liu, W.; Tang, L.; Yao, Z.; Wen, Z.; Liang, B.; Jia, Z. Multidimensional Vibration Suppression Method with Piezoelectric Control for Wind Tunnel Models. Sensors 2019, 19, 3998. https://doi.org/10.3390/s19183998
Zhou M, Liu W, Tang L, Yao Z, Wen Z, Liang B, Jia Z. Multidimensional Vibration Suppression Method with Piezoelectric Control for Wind Tunnel Models. Sensors. 2019; 19(18):3998. https://doi.org/10.3390/s19183998
Chicago/Turabian StyleZhou, Mengde, Wei Liu, Linlin Tang, Zhuang Yao, Zhengquan Wen, Bing Liang, and Zhenyuan Jia. 2019. "Multidimensional Vibration Suppression Method with Piezoelectric Control for Wind Tunnel Models" Sensors 19, no. 18: 3998. https://doi.org/10.3390/s19183998
APA StyleZhou, M., Liu, W., Tang, L., Yao, Z., Wen, Z., Liang, B., & Jia, Z. (2019). Multidimensional Vibration Suppression Method with Piezoelectric Control for Wind Tunnel Models. Sensors, 19(18), 3998. https://doi.org/10.3390/s19183998