Interference Mitigation in Automotive Radars Using Pseudo-Random Cyclic Orthogonal Sequences

 , and
, and 
Abstract
1. Introduction
- Development of a mathematical model for the mutual interference in automotive radar systems.
- Development of an analytic framework to characterize the effective interfering power parametrized according to the frequency separation between radars. This framework is applicable to a large class of radar waveforms.
- Representation of a new family of waveform sequences which are capable of mitigating the effects of multi-radar interference without the need for any centralized co-ordination.
- Development of a new statistical characterization of mutual interference in an analytically tractable form.
2. Brief Review of Existing Work on Automotive Radar Interference
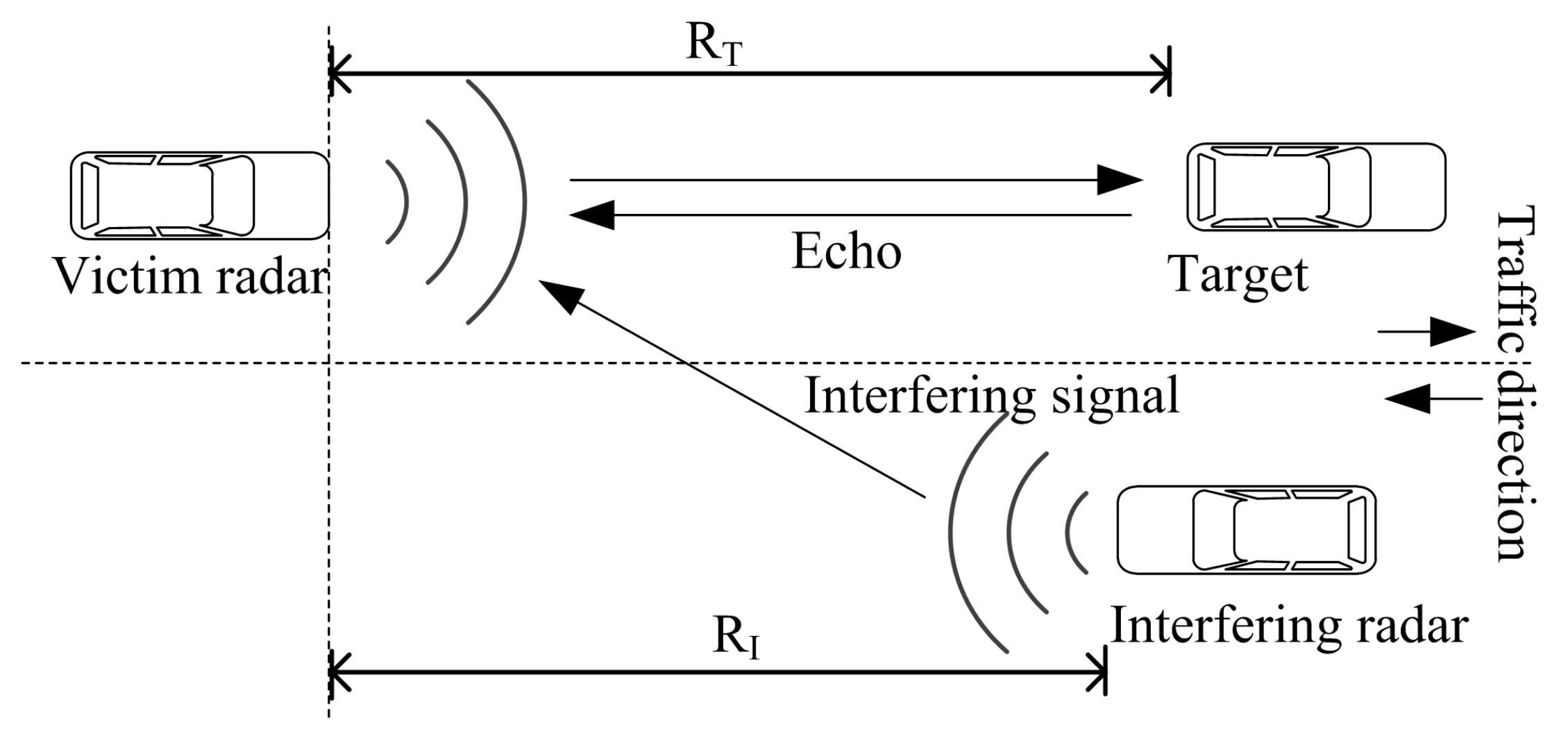
3. Interference Modelling
- Short range radars (SRR) for distances of 0.15–30 m
- Medium range radars (MRR) for distances of 1–100 m
- Long range radars (LRR) for distances of 10–250 m
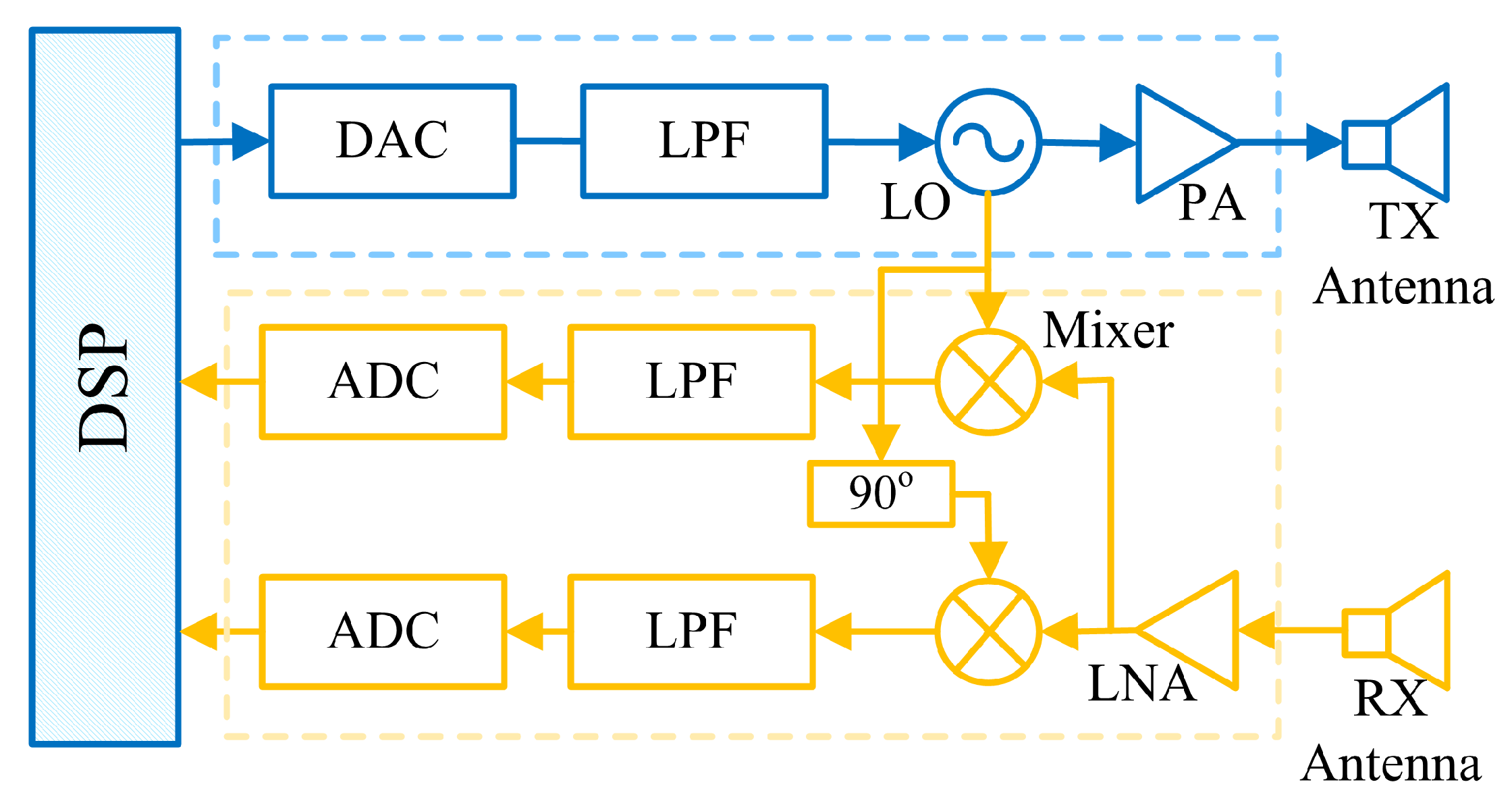
Radar Architecture
4. Pseudo-Random Cyclic Orthogonal Sequences
4.1. Random Stepped Frequency Radar
- All available frequencies need to be used within the pulse train of length N.
- The sequence does not have repeated elements within a pulse train, since it is sufficient to probe the scene once at each frequency tone.
- The sequence is cyclic, thus it repeats itself periodically after N pulses.
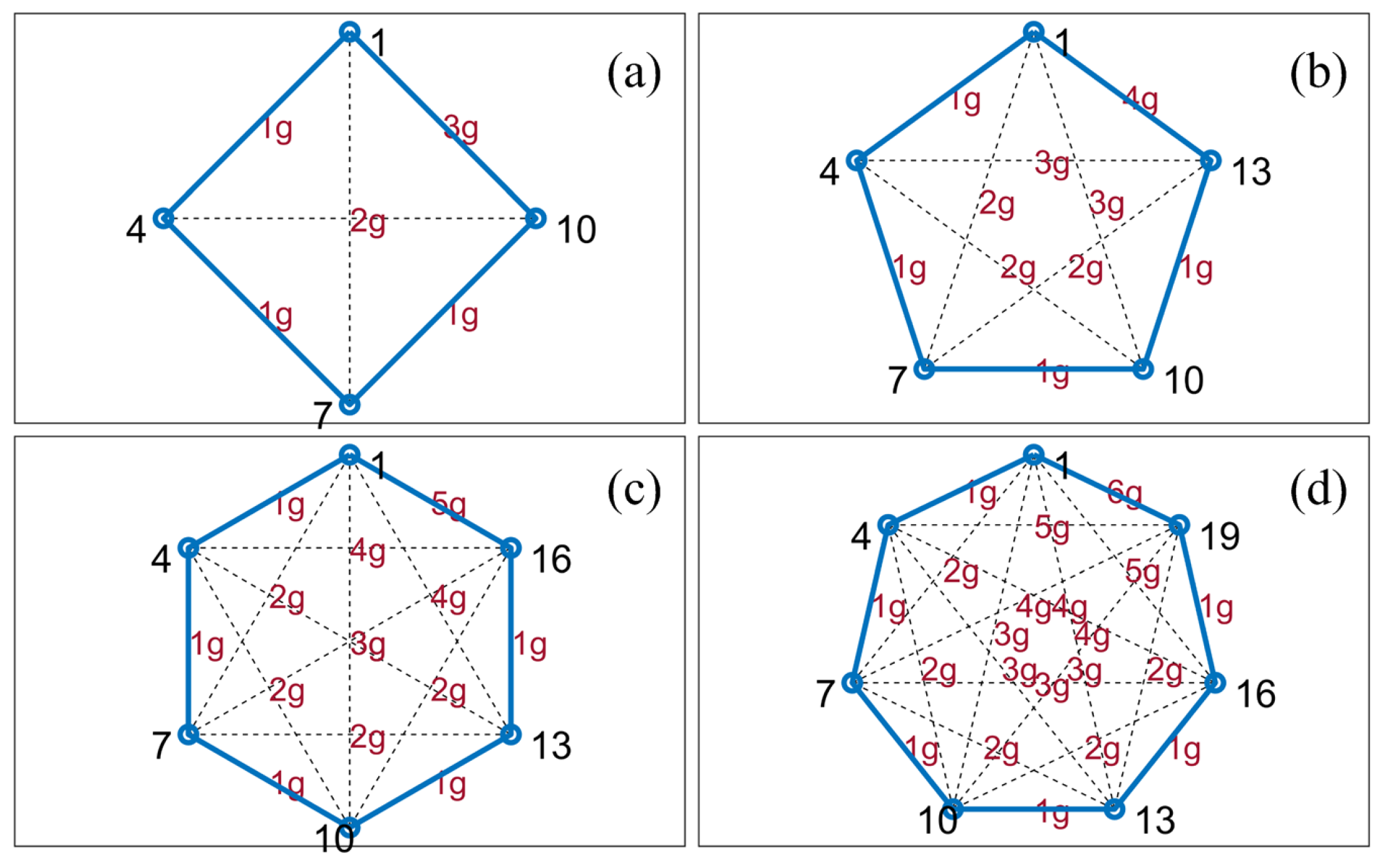
4.2. Generating the PRCOS Sequence
- Generate the seed matrix matrix with elements , , .
- Permute the columns so that the resulting matrix with elements , where means column-wise permutation.
- Re-order the matrix in a vector, such that its elements ,
5. Performance Analysis of PRCOS
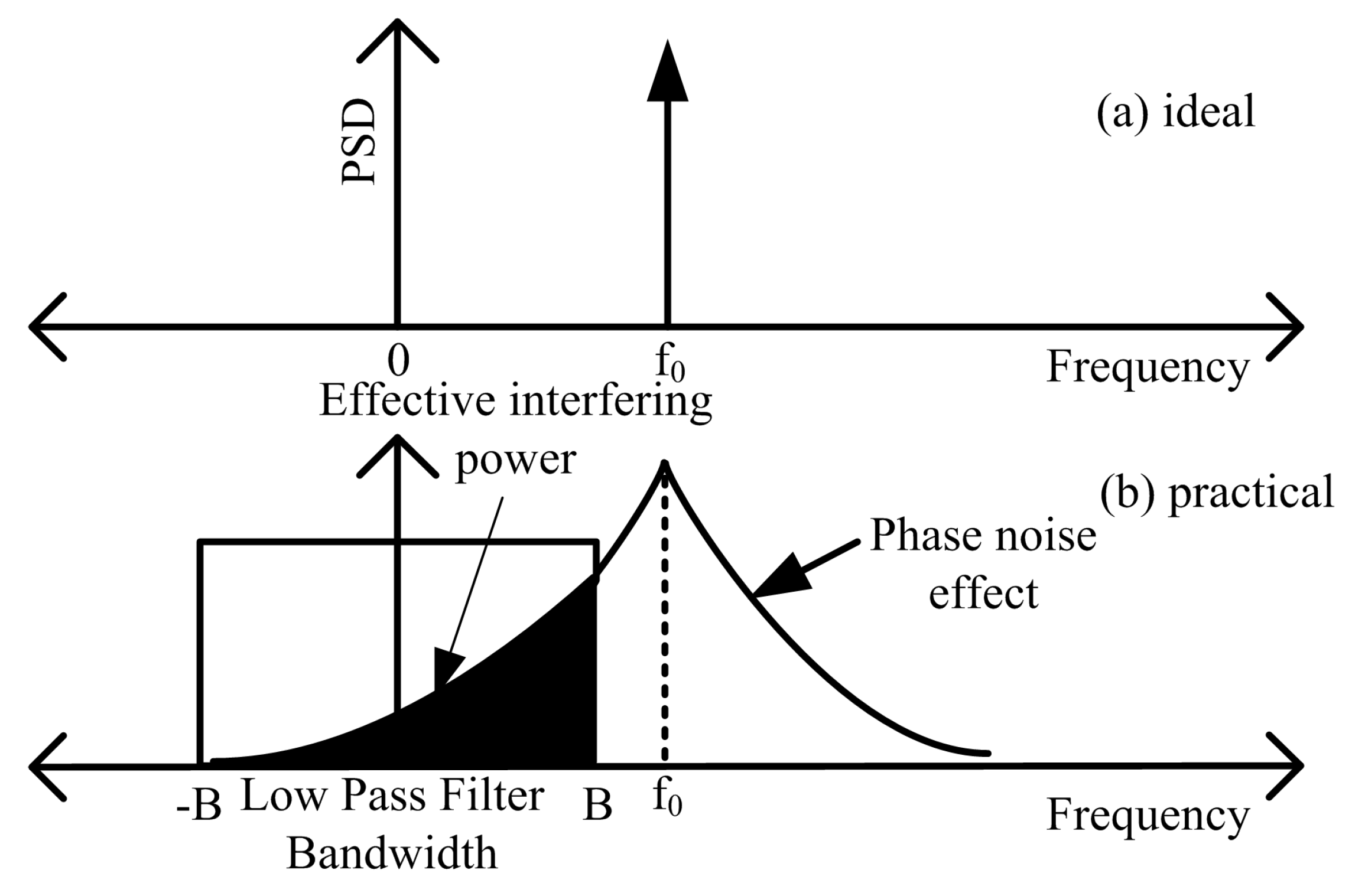
5.1. Oscillator Phase Noise
5.2. Effect of Transmit Waveform
5.3. Pulse Waveform and Phase Noise
5.4. Effective Interfering Power
5.5. Statistical Analysis of SIR
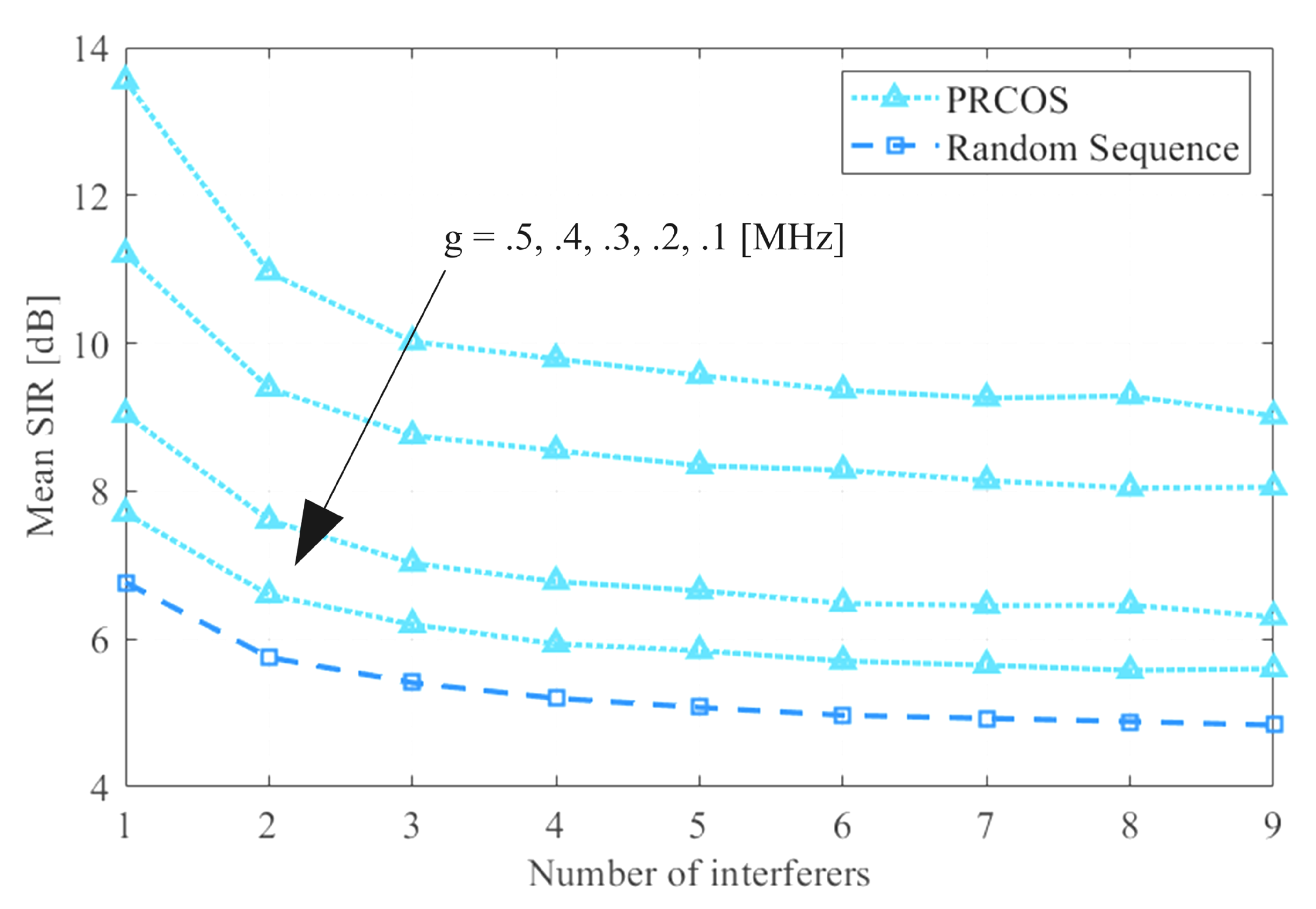
6. Simulation Results
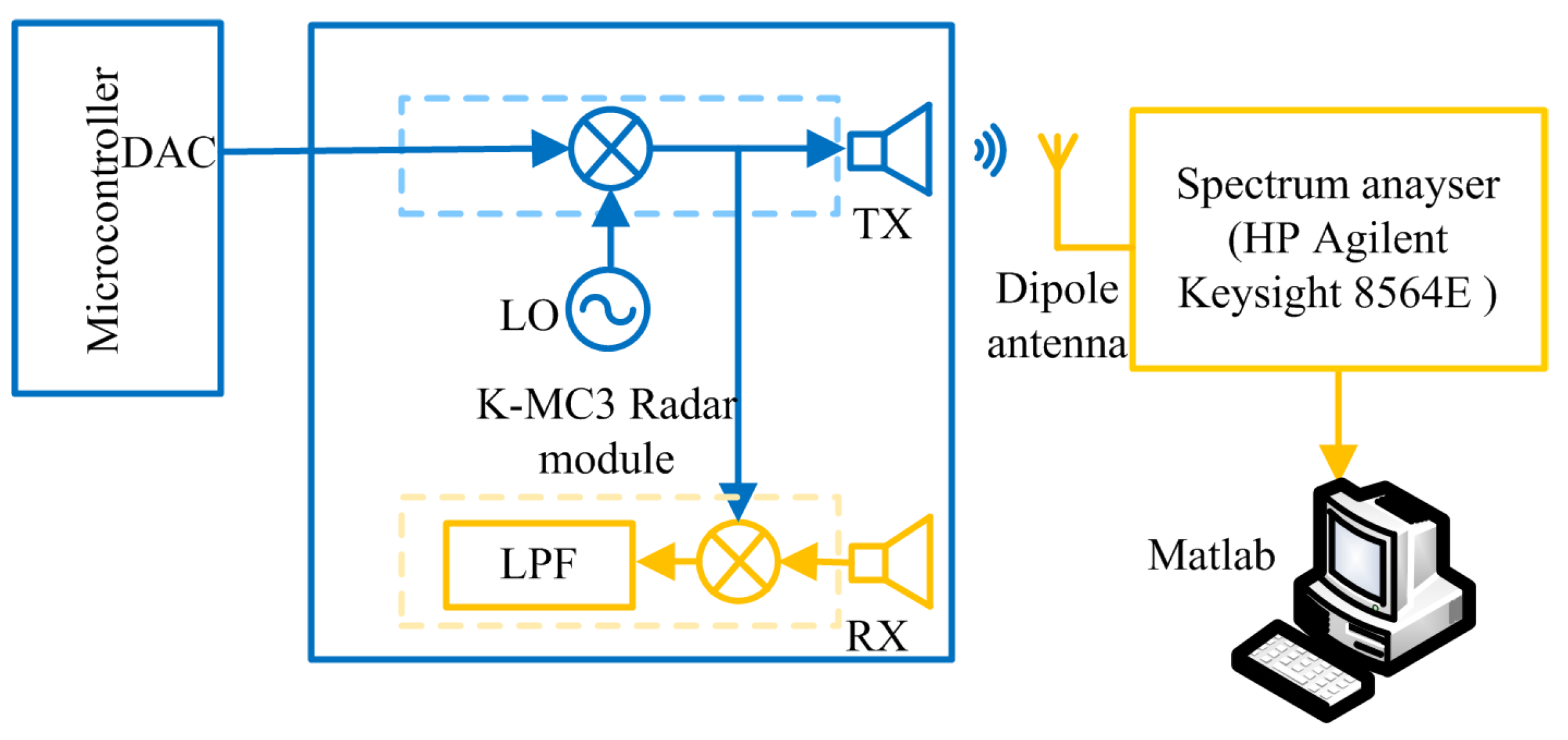
7. Experimental Results
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Skaria, S.; Al-Hourani, A.; Lech, M.; Evans, R.J. Hand-Gesture Recognition Using Two-Antenna Doppler Radar With Deep Convolutional Neural Networks. IEEE Sens. J. 2019, 19, 3041–3048. [Google Scholar] [CrossRef]
- Li, M.; Evans, R.J.; Skafidas, E.; Moran, B.; Doang, H.T.; Koottala, R.; Felic, G.; Le, H.V. A high Performance Low Cost CMOS Radar for Advanced Driving Assistance Applications. In Proceedings of the International Conference on Connected Vehicles and Expo (ICCVE), Beijing, China, 12–16 December 2012; pp. 197–200. [Google Scholar] [CrossRef]
- Luo, T.N.; Wu, C.H.E.; Chen, Y.J.E. A 77 GHz CMOS Automotive Radar Transceiver With Anti-Interference Function. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 3247–3255. [Google Scholar] [CrossRef]
- Evans, R.J.; Farrell, P.M.; Felic, G.; Duong, H.T.; Le, H.V.; Li, J.; Li, M.; Moran, W.; Skafidas, E. Consumer radar: Opportunities and challenges. In Proceedings of the 11th European Radar Conference, Rome, Italy, 8–10 October 2014; pp. 5–8. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Evans, R.J.; Farrell, P.M.; Moran, B.; Martorella, M.; Kandeepan, S.; Skafidas, S.; Parampalli, U. Millimeter-wave integrated radar systems and techniques. In Academic Press Library in Signal Processing, Volume 7; Elsevier: Amsterdam, The Netherlands, 2018; pp. 317–363. [Google Scholar] [CrossRef]
- Global Automotive Radar Market 2017–2023—Analysis, Trends, Market Size and Forecasts—Research and Markets. Available online: https://www.businesswire.com/news/home/20180111005751/en/Global-Automotive-Radar-Market-2017-2023—Analysis (accessed on 31 July 2019).
- Australian Communications and Media Authority. Radiocommunications (Low Interference Potential Devices) Class Licence 2015; ACMA: Canberra, ACT, Australia, 2015; Technical Report F2015L01438. [Google Scholar]
- Al-Hourani, A.; Evans, R.J.; Kandeepan, S.; Moran, B.; Eltom, H. Stochastic Geometry Methods for Modeling Automotive Radar Interference. IEEE Trans. Intell. Transp. Syst. 2018, 19, 333–344. [Google Scholar] [CrossRef]
- Goppelt, M.; Blöcher, H.L.; Menzel, W. Automotive radar—Investigation of mutual interference mechanisms. Adv. Radio Sci. Kleinheubacher Berichte 2010, 8, 55–60. [Google Scholar] [CrossRef]
- Kunert, M. The EU project MOSARIM: A general overview of project objectives and conducted work. In Proceedings of the 9th European Radar Conference, Amsterdam, The Netherlands, 31 October–2 November 2012; pp. 1–5. [Google Scholar]
- Brooker, G.M. Mutual Interference of Millimeter-Wave Radar Systems. IEEE Trans. Electromagn. Compat. 2007, 49, 170–181. [Google Scholar] [CrossRef]
- Goppelt, M.; Blöcher, H.L.; Menzel, W. Analytical investigation of mutual interference between automotive FMCW radar sensors. In Proceedings of the German Microwave Conference, Darmstadt, Germany, 14–16 March 2011; pp. 1–4. [Google Scholar]
- Bourdoux, A.; Parashar, K.; Bauduin, M. Phenomenology of mutual interference of FMCW and PMCW automotive radars. In Proceedings of the IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 1709–1714. [Google Scholar] [CrossRef]
- Hischke, M. Collision warning radar interference. In Proceedings of the Intelligent Vehicles ’95 Symposium, Detroit, MI, USA, 25–26 September 1995; pp. 13–18. [Google Scholar] [CrossRef]
- Pasya, I.; Kato, H.; Kobayashi, T. Interference Suppression Performance of Automotive UWB Radars Using Pseudo Random Sequences. Radioengineering 2015, 24, 932–939. [Google Scholar] [CrossRef]
- Kato, H.; Kobayashi, T. Detection probability of automotive radars using maximum length sequences to suppress interference from nearby radars. In Proceedings of the IEEE National Aerospace and Electronics Conference (NAECON 2014), Dayton, OH, USA, 24–27 June 2014; pp. 396–400. [Google Scholar] [CrossRef]
- Machowski, W.; Koutsogiannis, G.S.; Ratliff, P.A. Novel pulse-sequences design enables multi-user collision-avoidance vehicular radar. In Proceedings of the International Waveform Diversity and Design Conference, Pisa, Italy, 4–8 June 2007; pp. 155–159. [Google Scholar] [CrossRef]
- Cuypers, G.; Vanbleu, K.; Ysebaert, G.; Moonen, M.; Vandaele, P. Combining raised cosine windowing and per tone equalization for RFI mitigation in DMT receivers. In Proceedings of the IEEE International Conference on Communications (ICC ’03), Anchorage, AK, USA, 11–15 May 2003; Volume 4, pp. 2852–2856. [Google Scholar] [CrossRef]
- Elsehely, E.; Sobhy, M.I. Reduction of interference in automotive radars using multiscale wavelet transform. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Salt Lake City, UT, USA, 7–11 May 2001; Volume 5, pp. 2881–2884. [Google Scholar] [CrossRef]
- Sakkila, L.; Deloof, P.; Elhillali, Y.; Rivenq, A.; Niar, S. A Real Time Signal Processing for an Anti-collision Road Radar System. In Proceedings of the IEEE Vehicular Technology Conference, Montreal, QC, Canada, 25–28 September 2006; pp. 1–5. [Google Scholar] [CrossRef]
- Bechter, J.; Waldschmidt, C. Automotive radar interference mitigation by reconstruction and cancellation of interference component. In Proceedings of the IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Heidelberg, Germany, 27–29 April 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Bechter, J.; Eid, K.; Roos, F.; Waldschmidt, C. Digital beamforming to mitigate automotive radar interference. In Proceedings of the IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), San Diego, CA, USA, 19–20 May 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Sakkila, L.; Elhillali, Y.; Rivenq, A.; Tatkeu, C.; Rouvaen, J.M. Short range automotive radar based on UWB pseudo-random coding. In Proceedings of the 7th International Conference on ITS Telecommunications, Sophia Antipolis, France, 6–8 June 2007; pp. 1–6. [Google Scholar] [CrossRef]
- Fischer, C.; Blöcher, H.L.; Dickmann, J.; Menzel, W. Robust detection and mitigation of mutual interference in automotive radar. In Proceedings of the 16th International Radar Symposium (IRS), Dresden, Germany, 24–26 June 2015; pp. 143–148. [Google Scholar] [CrossRef]
- Bechter, J.; Sippel, C.; Waldschmidt, C. Bats-inspired frequency hopping for mitigation of interference between automotive radars. In Proceedings of the IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), San Diego, CA, USA, 19–20 May 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Barjenbruch, M.; Kellner, D.; Dietmayer, K.; Klappstein, J.; Dickmann, J. A method for interference cancellation in automotive radar. In Proceedings of the IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Heidelberg, Germany, 27–29 April 2015; pp. 1–4. [Google Scholar]
- Liu, T.H.; Hsu, M.L.; Tsai, Z.M. Mutual interference of pseudo random noise radar in automotive collision avoidance application at 24 GHz. In Proceedings of the IEEE 5th Global Conference on Consumer Electronics, Kyoto, Japan, 11–14 October 2016; pp. 1–2. [Google Scholar] [CrossRef]
- Morelande, M.A.; Mei, L.; Evans, R.J. A method of Target Detection. Australia Patent 2865803, 6 September 2013. [Google Scholar]
- Evans, R.J.; Li, J.Z.C.; Skafidas, E.; Moran, W.; Morelande, M. Apparatus and a Method for Obtaining Information about at Least One Target. Australia Patent 14/357 638, 23 October 2014. [Google Scholar]
- Tan, H.; Wen, D.; Xuanyuan, Y. Simulation on the impact of active interference to radar pulse compression. In Proceedings of the 5th IEEE International Symposium on Microwave, Antenna, Propagation and EMC Technologies for Wireless Communications, Chengdu, China, 29–31 October 2013; pp. 505–510. [Google Scholar] [CrossRef]
- Kajiwara, A. Vehicular stepped-FM coded radar for collision avoidance. In Proceedings of the 48th IEEE Vehicular Technology Conference Pathway to Global Wireless Revolution, Ottawa, ON, Canada, 21 May 1998. [Google Scholar] [CrossRef]
- Kusmadi; Munir, A. Simulation design of compact stepped-frequency continuous-wave through-wall radar. In Proceedings of the International Conference on Electrical Engineering and Informatics, Denpasar, Indonesia, 10–11 August 2015. [Google Scholar] [CrossRef]
- Sanders, F.; Sole, R.; Bedford, B. Effects of RF Interference on Radar Receivers; NTIA Report; National Telecommunications and Information Administration: Washington, DC, USA, 2006. [Google Scholar]
- Axelsson, S.R.J. Analysis of Random Step Frequency Radar and Comparison With Experiments. IEEE Trans. Geosci. Remote. Sens. 2007, 45, 890–904. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Evans, R.J.; Moran, B.; Kandeepan, S.; Parampalli, U. Efficient Range-Doppler Processing for Random Stepped Frequency Radar in Automotive Applications. In Proceedings of the IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Levanon, N. Stepped-frequency pulse-train radar signal. IEE Proc. Radar Sonar Navig. 2002, 149, 297. [Google Scholar] [CrossRef]
- Huang, T.; Liu, Y.; Xu, X.; Eldar, Y.C.; Wang, X. Analysis of Frequency Agile Radar via Compressed Sensing. IEEE Trans. Signal Process. 2018, 66, 6228–6240. [Google Scholar] [CrossRef]
- Yang, J.; Thompson, J.; Huang, X.; Jin, T.; Zhou, Z. Random-Frequency SAR Imaging Based on Compressed Sensing. IEEE Trans. Geosci. Remote. Sens. 2013, 51, 983–994. [Google Scholar] [CrossRef]
- Tan, M.; Wang, Y.C.; Li, H.Z.; Li, X.; Bao, L. Stepped Frequency Pulse Frequency Diverse Array Radar for Target Localization in Angle and Range Domains. Int. J. Antennas Propag. 2018, 2018, 1–12. [Google Scholar] [CrossRef]
- Liu, Y.; Meng, H.; Li, G.; Wang, X. Range-velocity estimation of multiple targets in randomised stepped-frequency radar. Electron. Lett. 2008, 44, 1032–1034. [Google Scholar] [CrossRef]
- Aubry, A.; Maio, A.D.; Carotenuto, V.; Farina, A. Radar Phase Noise Modeling and Effects-Part I: MTI Filters. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 698–711. [Google Scholar] [CrossRef]
- Khanzadi, M.R. Modeling and Estimation of Phase Noise in Oscillators with Colored Noise Sources. Ph.D. Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2013. [Google Scholar]
- Demir, A.; Mehrotra, A.; Roychowdhury, J. Phase noise and timing jitter in oscillators. In Proceedings of the IEEE 1998 Custom Integrated Circuits Conference, Santa Clara, CA, USA, 14 May 1998; pp. 45–48. [Google Scholar] [CrossRef]
- Li, M.; Evans, R.J.; Skafidas, E.; Moran, B. Radar-on-a-chip (ROACH). In Proceedings of the IEEE Radar Conference, Washington, DC, USA, 10–14 May 2010; pp. 1224–1228. [Google Scholar] [CrossRef]
- Miller, S.; Childers, D. Probability and Random Processes, Second Edition: With Applications to Signal Processing and Communications; Academic Press: Cambridge, MA, USA, 2012. [Google Scholar]
- Sadeghi, M.; Gholami, M. Time Synchronizing Signal by GPS Satellites. WSEAS Trans. Commun. 2008, 7, 6228–6240. [Google Scholar]
- RFbeam Microwave GmbH. "K-MC3 Radar Transceiver", March 2010. [Revised Nov. 2018.]. Available online: https://www.rfbeam.ch/files/products/17/downloads/Datasheet_K-MC3.pdf (accessed on 14 october 2019).
- Skaria, S.; Al-Hourani, A.; Evans, R.J.; Sithamparanathan, K.; Paramalli, U. K-MC3 Radar Module Output of Pulse Modulation. Available online: https://www.researchgate.net/publication/336207795_K-MC3_radar_module_output_of_pulse_modulation (accessed on 2 October 2019).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Technique | Waveform |
|---|---|---|
| [22] | Signal processing and adaptive beam-forming | Chirp sequence |
| [25] | Adaptive frequency hopping | FMCW |
| [3] | Frequency domain | FMCW |
| [24] | Adaptive beam forming | Chirp sequence |
| [21] | Real-time signal processing | Chirp sequence |
| [26] | Signal processing | Chirp sequence |
| [27] | Coding technique | CDMA |
| [15,16] | Polarization and coding technique | CDMA |
| [13] | Time domain, frequency domain and coding technique | FMCW, modulated pulses |
| [17] | Time domain | Pulse waveform |
| [28,29] | Frequency domain | Stepped frequency waveform |
| Phases | |||||
|---|---|---|---|---|---|
| 0 | |||||
| 0 | 0 | ||||
| 0 | |||||
| Parameter | Value |
|---|---|
| Spectrum analyser start frequency | GHz |
| Spectrum analyser stop frequency | GHz |
| Spectrum analyser resolution bandwidth | 10 kHz |
| Spectrum analyser video bandwidth | 1 kHz |
| Radar center frequency of pulse 1 | GHz |
| Radar center frequency of pulse 2 | GHz |
| Moving average window | 180 kHz |
| Parameter | Symbol | Value |
|---|---|---|
| Received power | - | |
| Transmitted power | - | |
| Radar cross section | 100 | |
| Effective aperture | - | |
| Distance to target | 3 | |
| Wavelength | cm | |
| Gain of the antenna | G | - |
| Interfering power | - | |
| Distance to interferer | 20–180 m | |
| Signal to interfering ratio | - | |
| Effective normalized interfering power | - | |
| Noise variance | - | |
| Phase noise power spectral density | - | |
| Scalar constant of phase noise | - | |
| Center frequency | GHz | |
| Pulse width | T | 3 s |
| Pulse amplitude | E | - |
| Frequency step | 100 kHz | |
| Bandwidth of RF | 10 MHz | |
| Frequency guard | g | 0.1–0.5 MHz |
| Frequency distance | d | - |
| Relative starting point of the sequence | - | |
| Empirical model amplitude level | A | 0.24 |
| Empirical model spread of the signal | C | 200 |
| Bandwidth of the IF/Baseband LPF | B | 400 |
| Number of frequency tones | N | 100 |
| Normalized signal to interference ratio | - | |
| Number of targets | Q | 1 |
| Number of users | M | 1 |
| SIR Threshold | 25 dB |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Skaria, S.; Al-Hourani, A.; J. Evans, R.; Sithamparanathan, K.; Parampalli, U. Interference Mitigation in Automotive Radars Using Pseudo-Random Cyclic Orthogonal Sequences. Sensors 2019, 19, 4459. https://doi.org/10.3390/s19204459
Skaria S, Al-Hourani A, J. Evans R, Sithamparanathan K, Parampalli U. Interference Mitigation in Automotive Radars Using Pseudo-Random Cyclic Orthogonal Sequences. Sensors. 2019; 19(20):4459. https://doi.org/10.3390/s19204459
Chicago/Turabian StyleSkaria, Sruthy, Akram Al-Hourani, Robin J. Evans, Kandeepan Sithamparanathan, and Udaya Parampalli. 2019. "Interference Mitigation in Automotive Radars Using Pseudo-Random Cyclic Orthogonal Sequences" Sensors 19, no. 20: 4459. https://doi.org/10.3390/s19204459
APA StyleSkaria, S., Al-Hourani, A., J. Evans, R., Sithamparanathan, K., & Parampalli, U. (2019). Interference Mitigation in Automotive Radars Using Pseudo-Random Cyclic Orthogonal Sequences. Sensors, 19(20), 4459. https://doi.org/10.3390/s19204459