Two-Dimensional Augmented State–Space Approach with Applications to Sparse Representation of Radar Signatures


Abstract
:1. Introduction
2. Data Model
2.1. 1-D Damped Exponential Model
2.2. 2-D Damped Exponential Model
3. Two-Dimensional Augmented State–Space Approach
3.1. Pole Estimation of the Down-Range Dimension
3.2. Pole Estimation of the Aspect Dimension
4. Results and Discussion
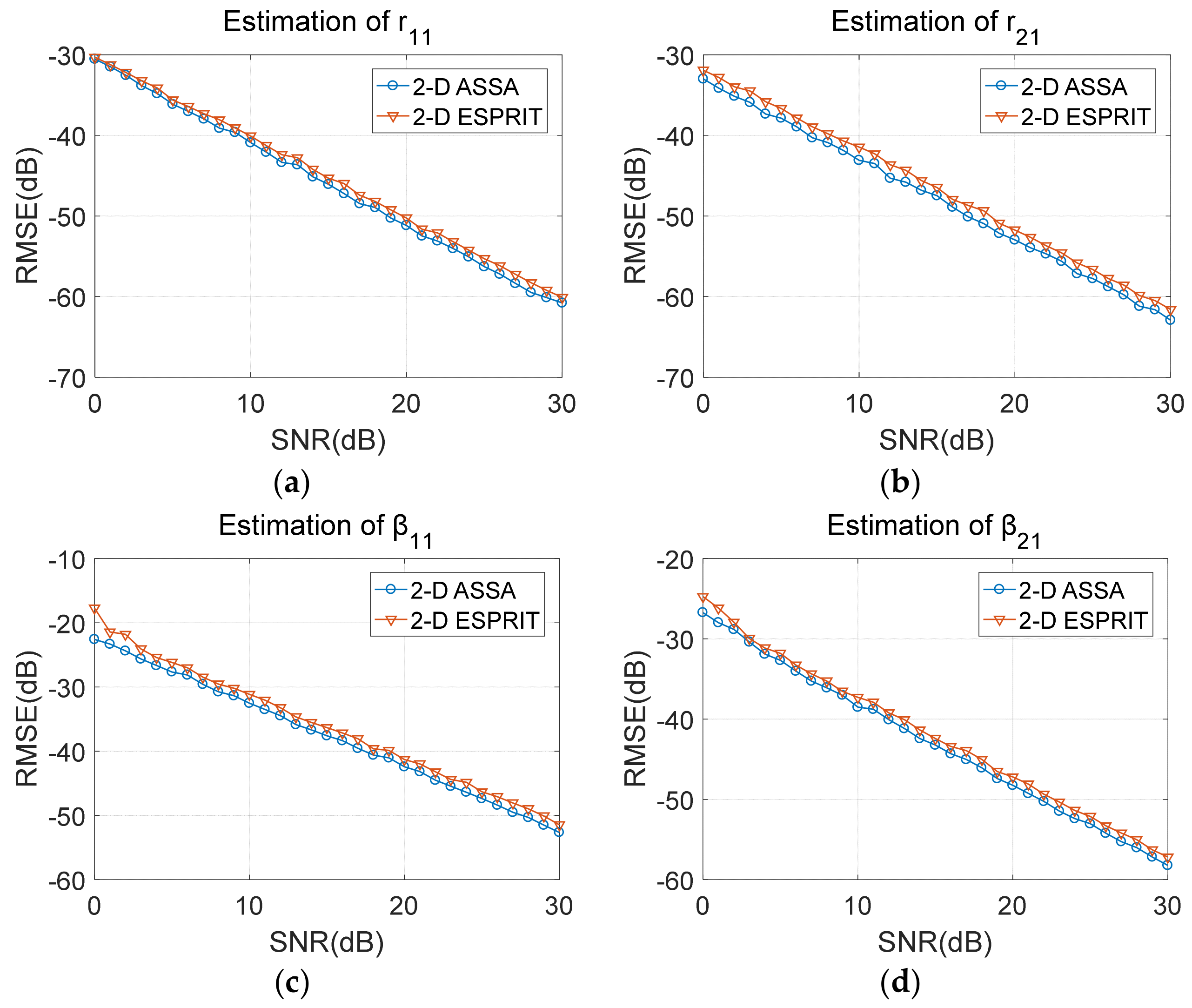
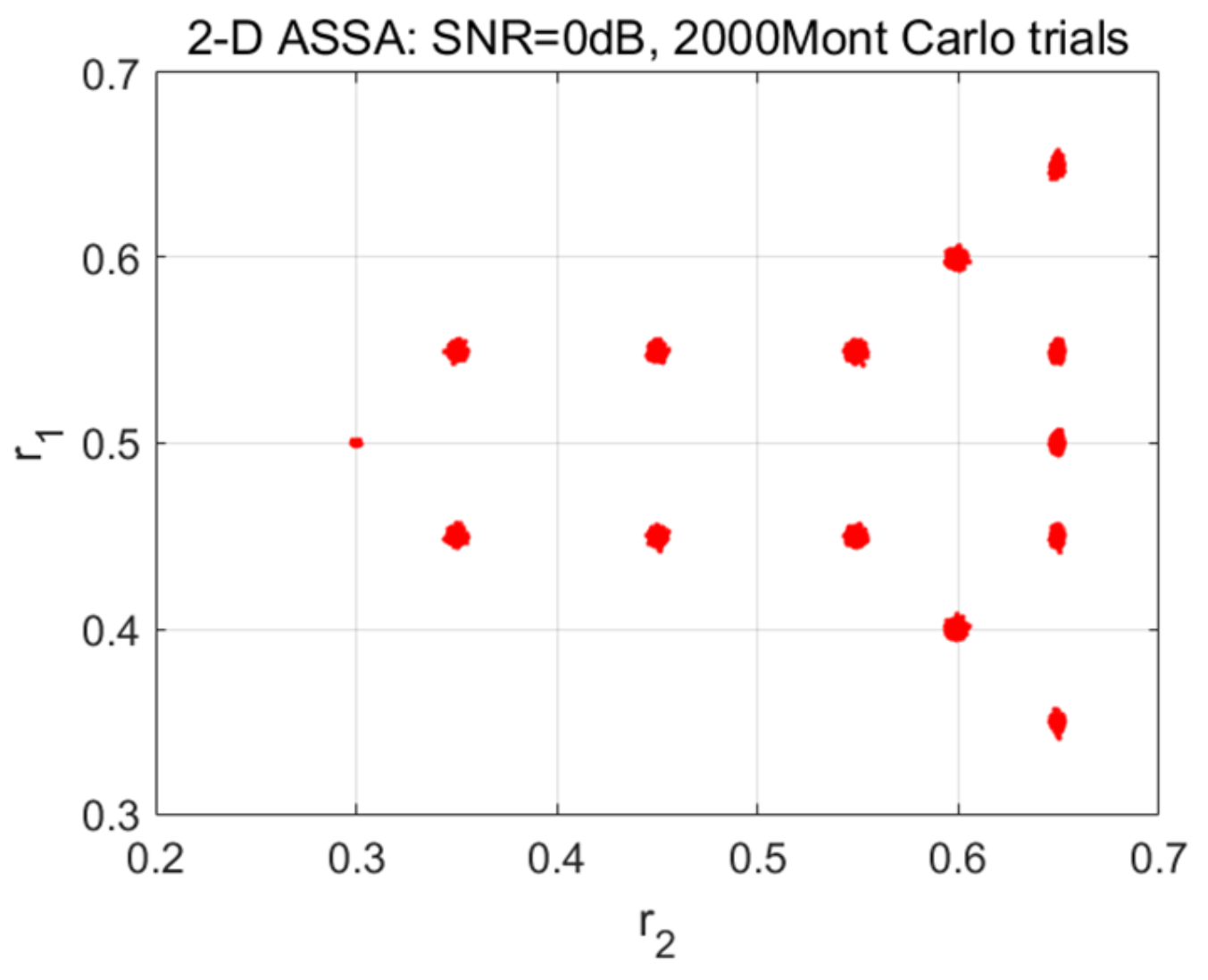
4.1. Numerical Signatures with Point Scattering Centers
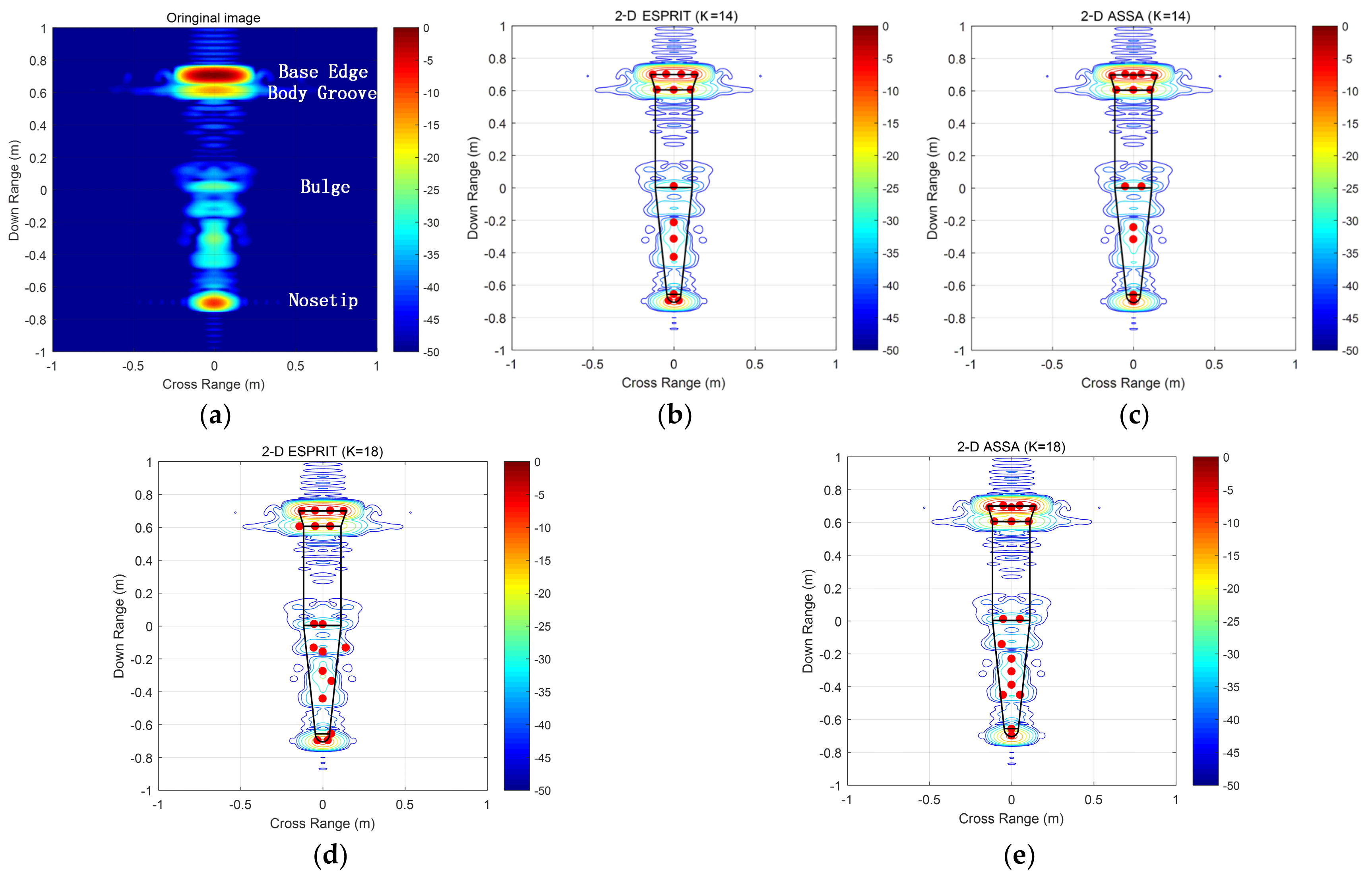
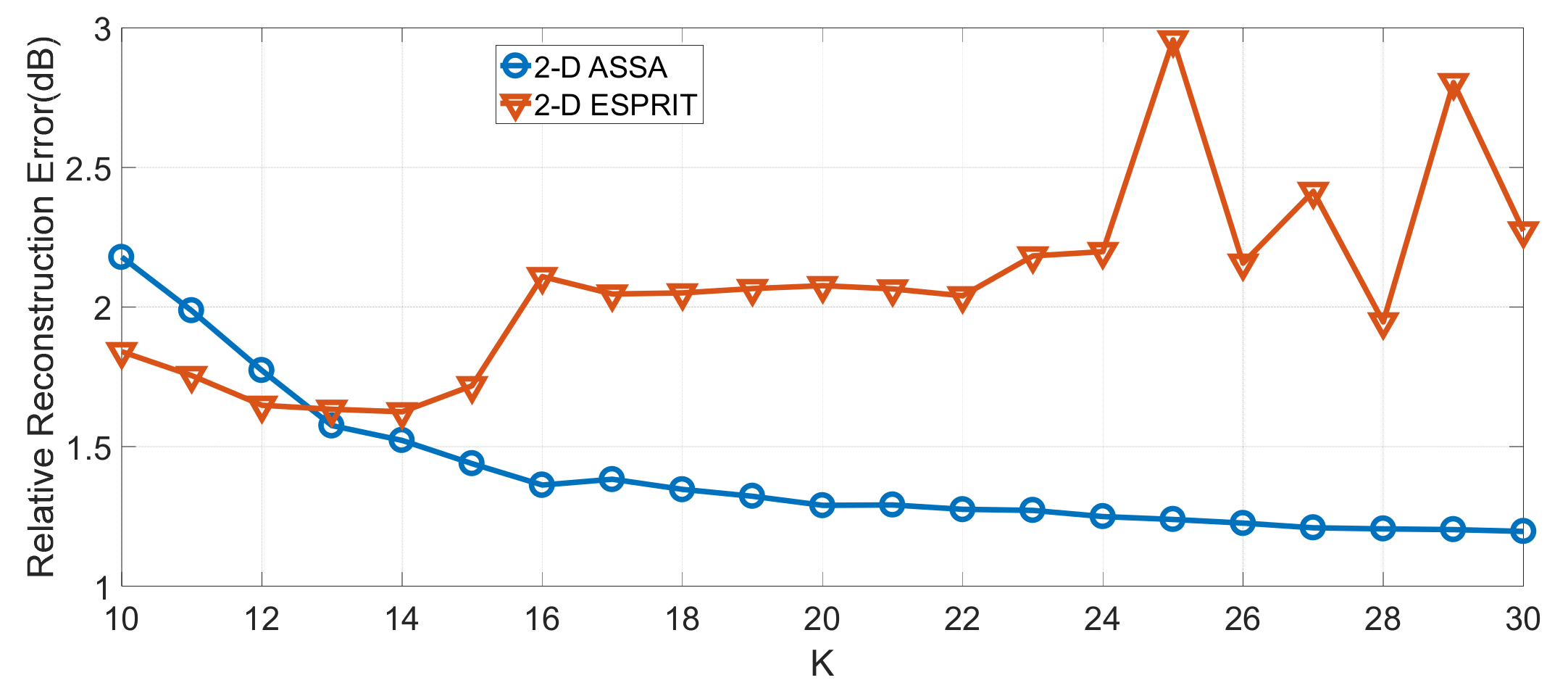
4.2. Numerical Signatures of Computer-Aided Design (CAD) Model
4.3. Measured ISAR Signatures
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
References
- Wang, L.; Zhao, L.F.; Bi, G.; Wan, C. Sparse Representation-Based ISAR Imaging Using Markov Random Fields. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2015, 8, 3941–3953. [Google Scholar] [CrossRef]
- Lasserre, M.; Bidon, S.; Chevalier, F.L. New Sparse-Promoting Prior for the Estimation of a Radar Scene with Weak and Strong Targets. IEEE Trans. Signal Process. 2016, 64, 4634–4643. [Google Scholar] [CrossRef] [Green Version]
- Tseng, N. A very Efficient RCS Data Compression and Reconstruction Technique. Master’s Thesis, The Ohio State University, Columbus, OH, USA, 1992. [Google Scholar]
- Dong, G.G.; Wang, N.; Kuang, G.Y. Sparse Representation of Monogenic Signal: With Application to Target Recognition in SAR Images. IEEE Signal Process. Lett. 2014, 21, 952–956. [Google Scholar]
- Xu, X.J.; He, F.Y. An Iterative Procedure for Ultra-Wideband Imagery of Space Objects from Distributed Multi-Band Radar Signatures. Proc. SPIE. 2014, 9227. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. An Adaptive Filtering Approach to Spectral Estimation and SAR Imaging. IEEE Trans. Signal Process. 1996, 44, 1469–1484. [Google Scholar]
- Graaf, S.R.D. Parametric Estimation of Complex 2-D Sinusoids. In Proceedings of the IEEE Fouth Annual ASSP Workshop on Spectrum Estimation and Modeling, Minneapolis, MN, USA, 3–5 August 1988; IEEE: Piscataway, NJ, USA; pp. 391–396. [Google Scholar]
- Choi, I.S.; Kim, H.T. Two-Dimensional Evolutionary Programming-Based CLEAN. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 373–382. [Google Scholar] [CrossRef]
- Varshney, K.R.; Cethin, M.; Fisher, J.W.; Willsky, A.S. Sparse Representation in Structured Dictionaries With Application to Synthetic Aperture Radar. IEEE Trans. Signal Process. 2008, 56, 3548–3561. [Google Scholar] [CrossRef]
- Potter, L.C.; Erthin, E.; Parker, J.T.; Cethin, M. Sparsity and Compressed Sensing in Radar Imaging. Proc. IEEE. 2010, 98, 1006–1020. [Google Scholar] [CrossRef]
- Liu, H.C.; Jiu, B.; Liu, H.W.; Bao, Z. Superresolution ISAR Imaging Based on Sparse Bayesian Learning. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5005–5013. [Google Scholar]
- Odendaal, J.W.; Barnard, E.; Pistorius, C.W.I. Two-Dimensional Superresolution Radar Imaging Using the MUSIC Algorithm. IEEE Trans. Antennas Propag. 1994, 42, 1386–1391. [Google Scholar] [CrossRef]
- Hua, Y.; Sarkar, T.K. Matrix Pencil Method for Estimating Parameters of Exponentially Damped/undamped Sinusoids in Noise. IEEE Trans. Signal Process. 1990, 36, 814–824. [Google Scholar] [CrossRef]
- Hua, Y. Estimating Two-Dimensional Frequencies by Matrix Enhancement and Matrix Pencil. IEEE Trans. Signal Process. 1992, 40, 2267–2280. [Google Scholar] [CrossRef]
- Sacchini, J.J.; Steedly, W.M.; Moses, R.L. Two-Dimensional Prony Modeling and Parameter Estimation. IEEE Trans. Signal Process. 1993, 41, 3127–3137. [Google Scholar] [CrossRef]
- Vanpoucke, F.; Moonen, M.; Berthoumieu, Y. An Efficient Subspace Algorithm for 2-D Harmonic Retrieval. In Proceedings of the ICASSP ’94. IEEE International Conference on Acoustics, Speech and Signal Processing, Adelaide, SA, Australia, 19–22 April 1994; pp. 461–464. [Google Scholar]
- Rouquette, S.; Najim, M. Estimation of Frequencies and Damping Factors by Two-Dimensional ESPRIT Type Methods. IEEE Trans. Signal Process. 2001, 49, 237–245. [Google Scholar] [CrossRef]
- Piou, J.E. System Realization Using 2-D Output Measurements. In Proceedings of the 2004 American Control Conference (ACC), Boston, MA, USA, 30 June–2 July 2004. [Google Scholar]
- Piou, J.E.; Dumanian, A.J. Application of the Fornasini-Marchesini First Model to Data Collected on a Complex Target Model. In Proceedings of the 2014 American Control Conference (ACC), Portland, OR, USA, 4–6 June 2014. [Google Scholar]
- Chen, F.J.; Fung, C.C.; Kok, C.W.; Kwong, S. Estimation of Two-Dimensional Frequencies Using Modified Matrix Pencil Method. IEEE Trans. Signal Process. 2007, 55, 718–724. [Google Scholar] [CrossRef]
- Qian, C.; Huang, L.; So, H.C.; Sidiropoulos, N.D.; Xie, J. Unitary PUMA Algorithm for Estimating the Frequency of a Complex Sinusoid. IEEE Trans. Signal Process. 2015, 63, 5358–5368. [Google Scholar] [CrossRef]
- Naishadham, K.; Piou, J.E. A Robust State-Space Model for the Characterization of Extended Returns in Radar Target Signatures. IEEE Trans. Antennas Propag. 2008, 56, 1742–1750. [Google Scholar] [CrossRef]
- Ying, C.J.; Chiang, H.C.; Moses, R.L.; Potter, L.C. Complex SAR Phase History Modeling Using Two-dimensional Parametric Estimation Techniques. Proc. SPIE. 1996, 2757, 174–185. [Google Scholar] [CrossRef]
- Xu, X.J.; He, F.Y. Fast and Accurate RCS Calculation for Squat Cylinder Calibrators. IEEE Antennas Propagation Mag. 2015, 57, 33–40. [Google Scholar] [CrossRef]
- Augusto, A.; Vincenzo, C.; Antonio, D.M.; Luca, P. High Range Resolution Profile Estimation via a Cognitive Stepped Frequency Technique. IEEE Trans. Aerosp. Electron. Syst. 2019, 1, 444–458. [Google Scholar]
- Pia, A.; Augusto, A.; Antonio, D.M.; Luca, P.; Silvia, L.U. HRR profile estimation using SLIM. IET Radar Sonar Navig. 2019, 4, 512–521. [Google Scholar]
- Potter, L.C.; Moses, R.L. Attributed Scattering Centers for SAR ATR. IEEE Trans. Image Process. 1997, 6, 79–91. [Google Scholar] [CrossRef] [PubMed]
- Wax, M.; Kailath, T. Detection of Signals by Information Theoretic Criteria. IEEE Trans. Signal Process. 1995, 33, 387–392. [Google Scholar] [CrossRef]
- Wax, M.; Ziskind, I. Detection of the Number of Coherent Signals by the MDL Principle. IEEE Trans. Signal Process. 1989, 27, 1190–1196. [Google Scholar] [CrossRef]
- Aksasse, B.; Radouane, L. Two-Dimensional Autoregressive (2-D AR) Model Order Estimation. IEEE Trans. Signal Process. 1999, 47, 2072–2077. [Google Scholar] [CrossRef]
- Kung, S.Y.; Arun, K.S.; Rao, D.V.B. State-space and Singular-Value Decomposition based Approximation Methods for the Harmonic Retrieval Problem. J. Opt. Soc. Am. 1983, 73, 1799–1811. [Google Scholar] [CrossRef]
- Michael, L.B. Two-Dimensional ESPRIT With Tracking for Radar Imaging and Feature Extraction. IEEE Trans. Antennas Propag. 2004, 2, 524–532. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | Rationale | Pole (1) Pairing Scheme |
|---|---|---|
| 2-D MUSIC | Signal-noise subspace decomposition | No need for pole-pairing |
| MEMP | Enhanced matrix decomposition | Maximizing a certain criterion |
| 2-D TLS Prony | TLS-based Prony model | Minimizing a certain distance |
| ACMP | Signal subspace decomposition | Rank-restoration scheme |
| 2-D ESPRIT | Shift-invariance structure of the signal subspace | Joint diagonalization scheme |
| 2-D system realization | State–space model | Algebraic method |
| 2-D ASSA | 2-D ESPRIT | |||
|---|---|---|---|---|
| Number of Scattering | ||||
| K = 57 ( = 99.16%) | 3.26 | 0.90 | 3.93 | 0.88 |
| K = 115 ( = 98.30%) | 2.60 | 0.92 | 3.20 | 0.90 |
| K = 156 ( = 97.70%) | 2.53 | 0.92 | 3.11 | 0.90 |
| K = 207 ( = 96.95%) | 2.47 | 0.93 | 2.96 | 0.91 |
| K = 256 ( = 96.22%) | 2.27 | 0.94 | 2.94 | 0.91 |
| K = 304 ( = 95.51%) | 2.07 | 0.94 | 2.90 | 0.91 |
| K = 407 ( = 93.99%) | 1.76 | 0.95 | 41.28 | 0.26 |
| K = 507 ( = 92.52%) | 1.60 | 0.96 | 68.69 | 0.12 |
| K = 607 ( = 91.04%) | 1.51 | 0.96 | 43.57 | 0.24 |
| Method | K | Running Time | |||
|---|---|---|---|---|---|
| Numerical data (41 × 401) | 2-D ESPRIT | 14 | 4000 × 4444 | 4000 × 4444 | 34.81 s |
| 2-D ASSA | 14 | 8282 × 200 | K1 × 20 × 22 | 0.94 s | |
| Measured ISAR data (81 × 251) | 2-D ESPRIT | 57 | 5000 × 5334 | 5000 × 5334 | 53.27 s |
| 115 | 5000 × 5334 | 5000 × 5334 | 94.18 s | ||
| 2-D ASSA | 57 | 10287 × 125 | K1 × 40 × 42 | 1.04 s | |
| 115 | 10287 × 125 | K1 × 40 × 42 | 1.19 s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, K.; Xu, X. Two-Dimensional Augmented State–Space Approach with Applications to Sparse Representation of Radar Signatures. Sensors 2019, 19, 4631. https://doi.org/10.3390/s19214631
Wu K, Xu X. Two-Dimensional Augmented State–Space Approach with Applications to Sparse Representation of Radar Signatures. Sensors. 2019; 19(21):4631. https://doi.org/10.3390/s19214631
Chicago/Turabian StyleWu, Kejiang, and Xiaojian Xu. 2019. "Two-Dimensional Augmented State–Space Approach with Applications to Sparse Representation of Radar Signatures" Sensors 19, no. 21: 4631. https://doi.org/10.3390/s19214631