A Novel Telemetry System for Real Time, Ship Main Propulsion Power Measurement


Abstract
:1. Introduction
- main propulsion power meters (including shaft torque and rotational speed meter),
- bunkered and consumed fuel flowmeters, preferably mass flowmeters,
- ship monitoring system of electric energy distribution,
- voyage monitoring system of the ship (speed, draught, trim, and wind).
2. Materials and Methods
2.1. The Torque Measurement Principle
- L—shaft length [m],
- T—torque [Nm],
- D—shaft diameter [m],
- G—shaft material shear modulus [Pa],
- φ—twisting angle [rad],
- ε—shaft strain [—],
- J0—polar moment of inertia of the shaft section [m4].
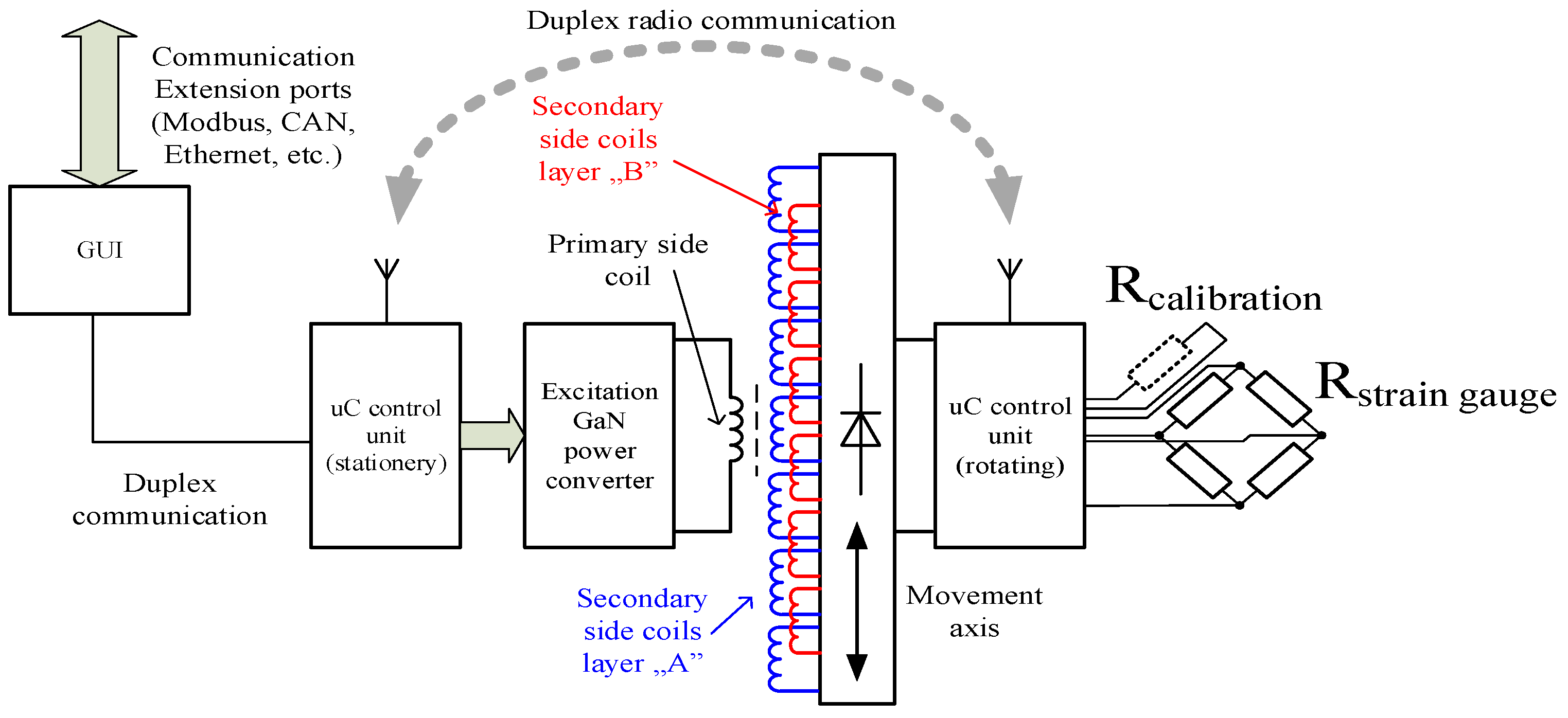
2.2. The Stationary Part
- Enable clear and multi-domain information flow of the measurement results to the graphical user interface using the Modbus protocol,
- Enable real-time, duplex (two-directional), and wireless communication with the non-stationary part,
- Introduce clear status information (power supply level of the non-stationary part, power supply level of the unit, and communication status) of the system operation to the user,
- Based on the feedback from the non-stationary part, control the operation of the wireless energy transmission unit.
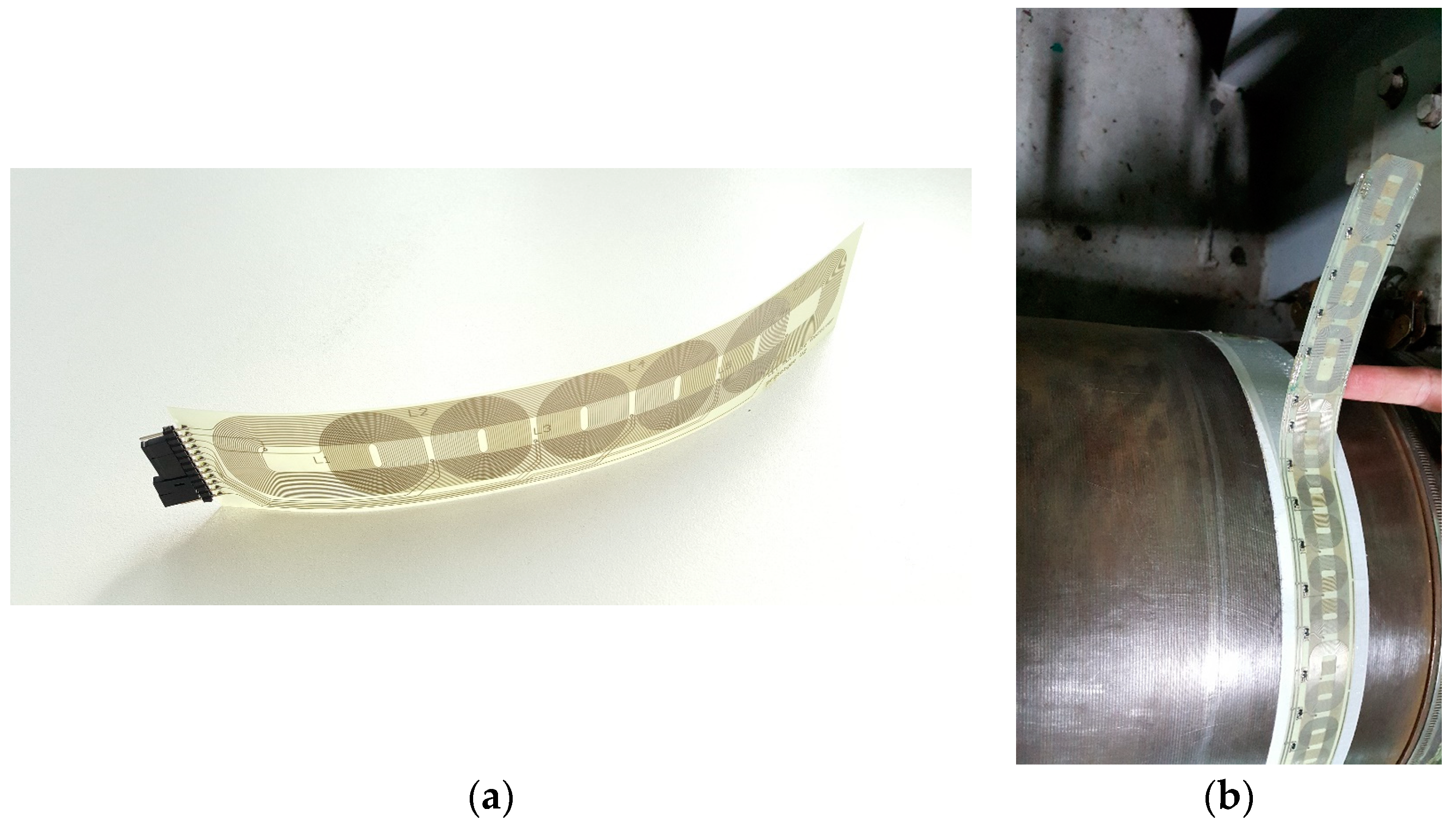
2.3. The Wireless Power Transmission System
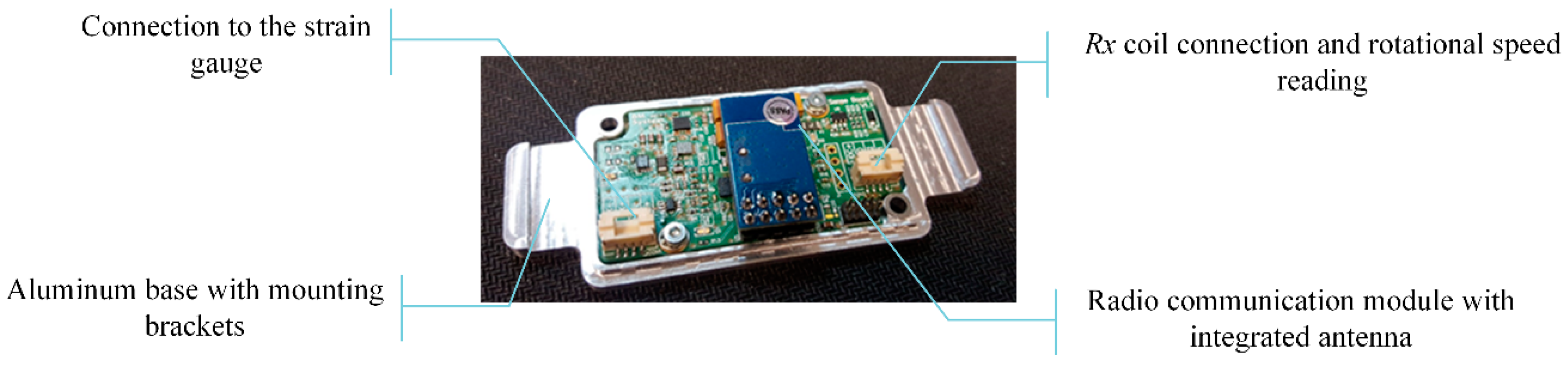
2.4. The Non-Stationary Part
- Perform the µV scale measurements on the strain gauge and rotational speed readings from the wireless power supply coils,
- Enable real-time, duplex (two-directional), and wireless communication with the stationary part,
- Introduce clear status information (communication status also indicating proper power supply levels) to the user,
- Based on the feedback from the stationary part, allow the calibration procedure based on a calibration resistor.
2.5. The Graphical User Interface (GUI)
3. Results and Discussion
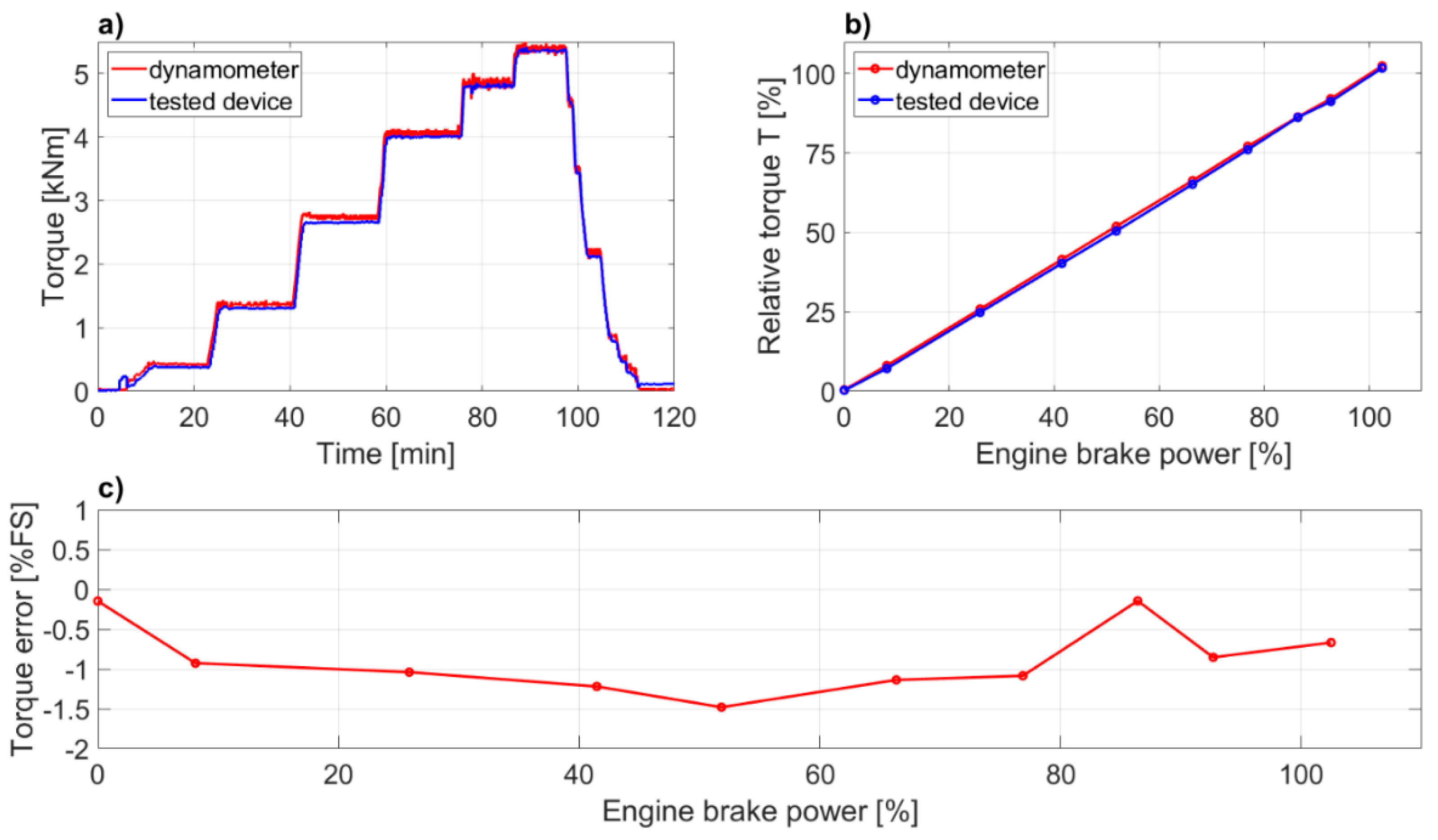
3.1. Test Bed System Validation
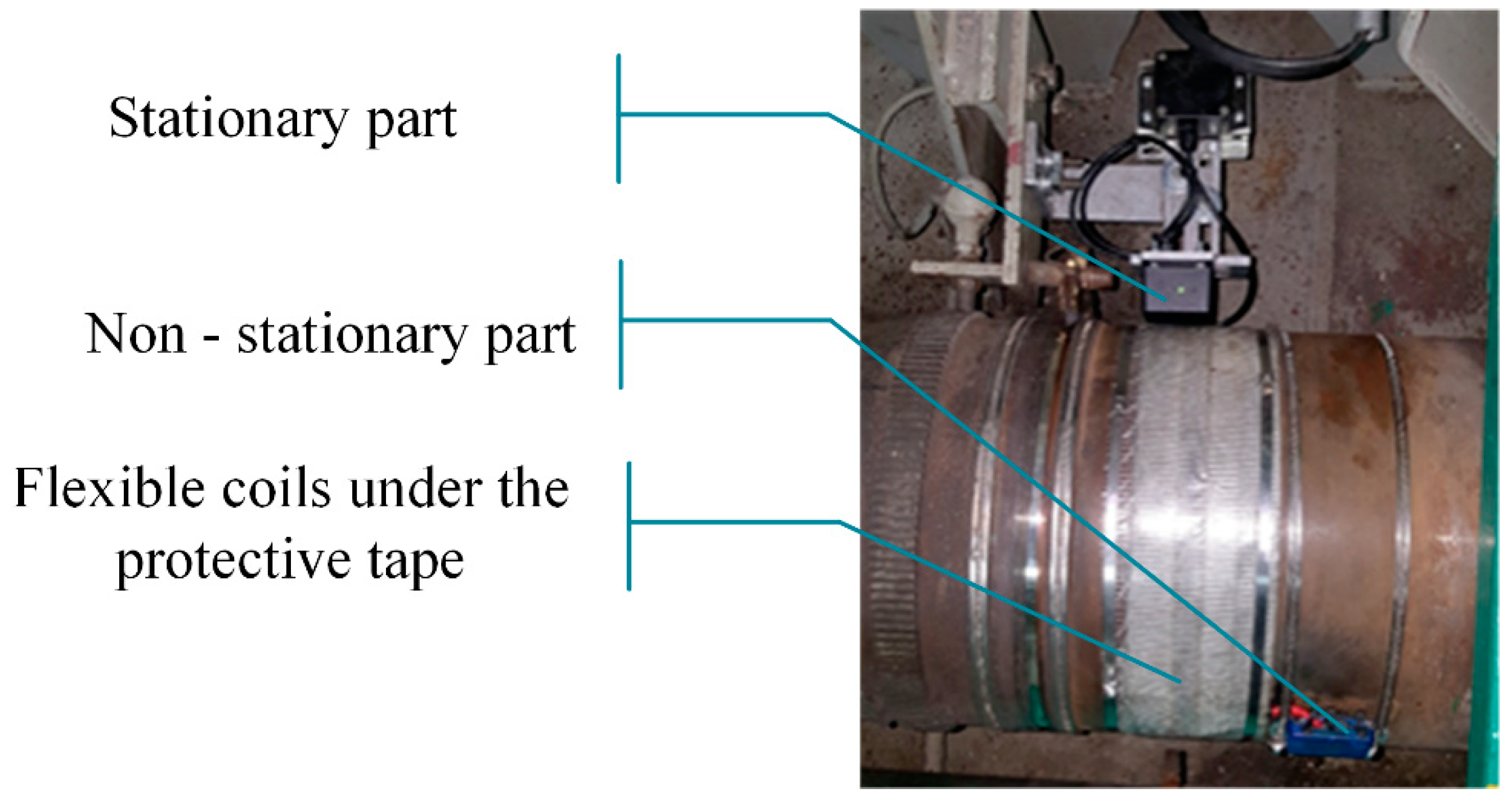
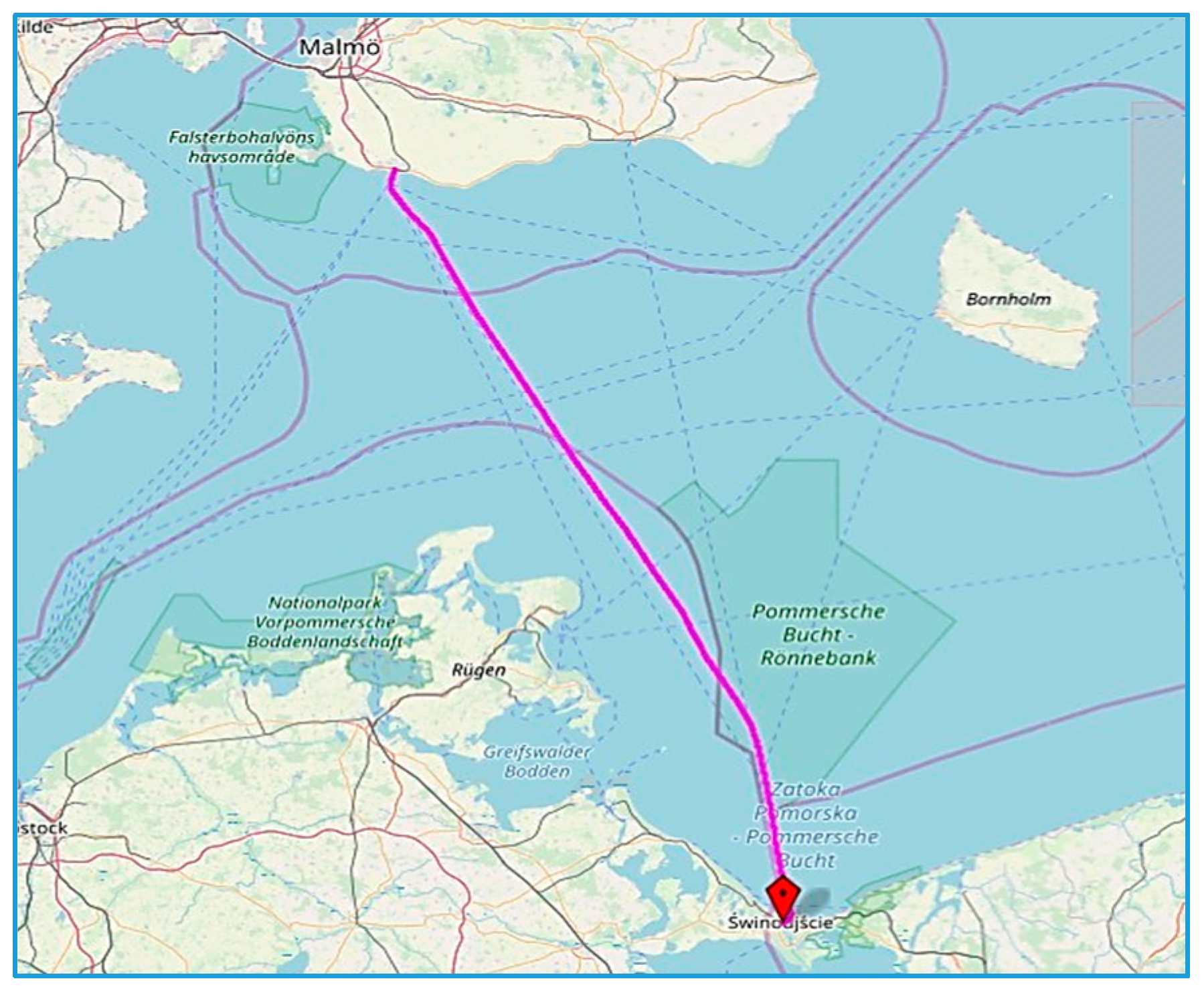
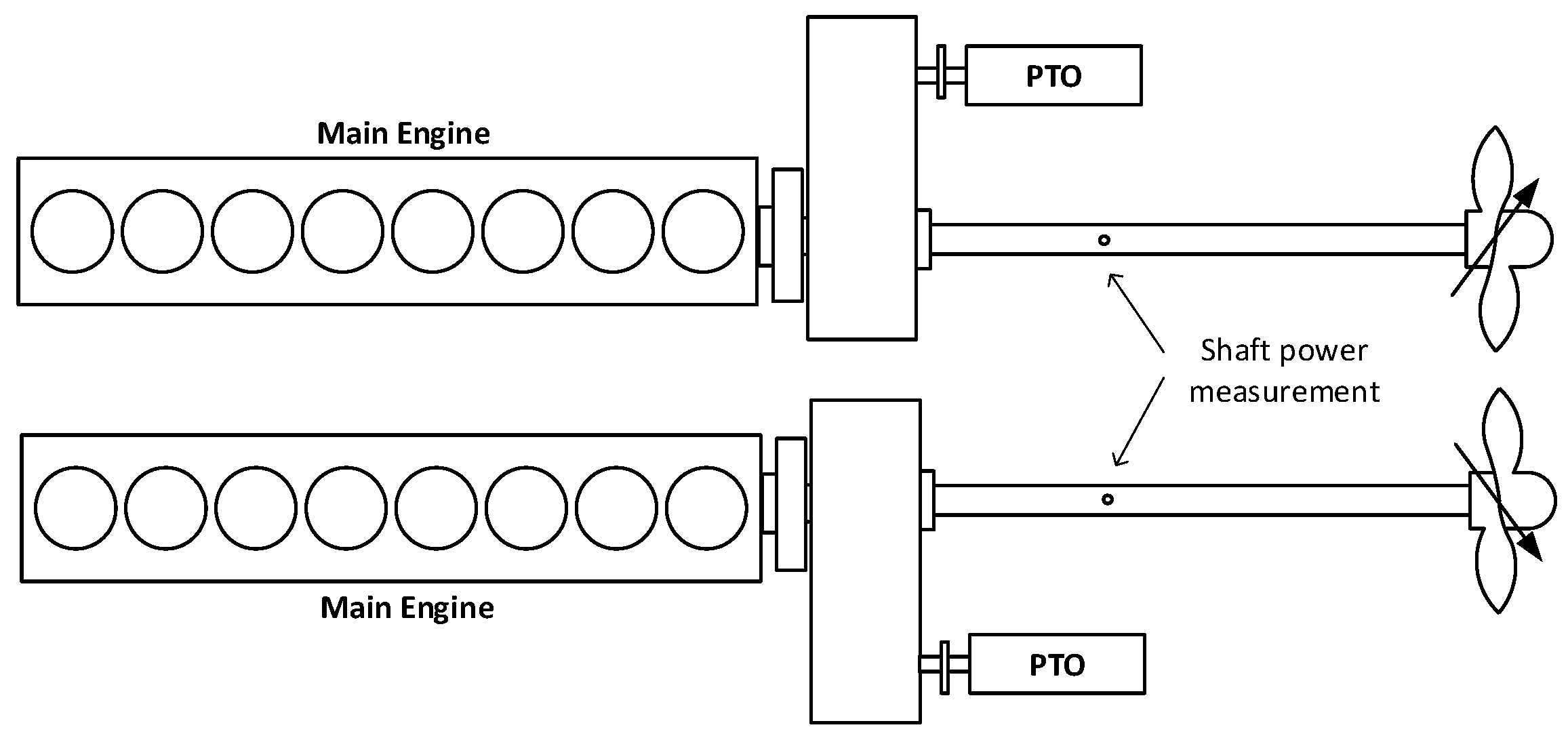
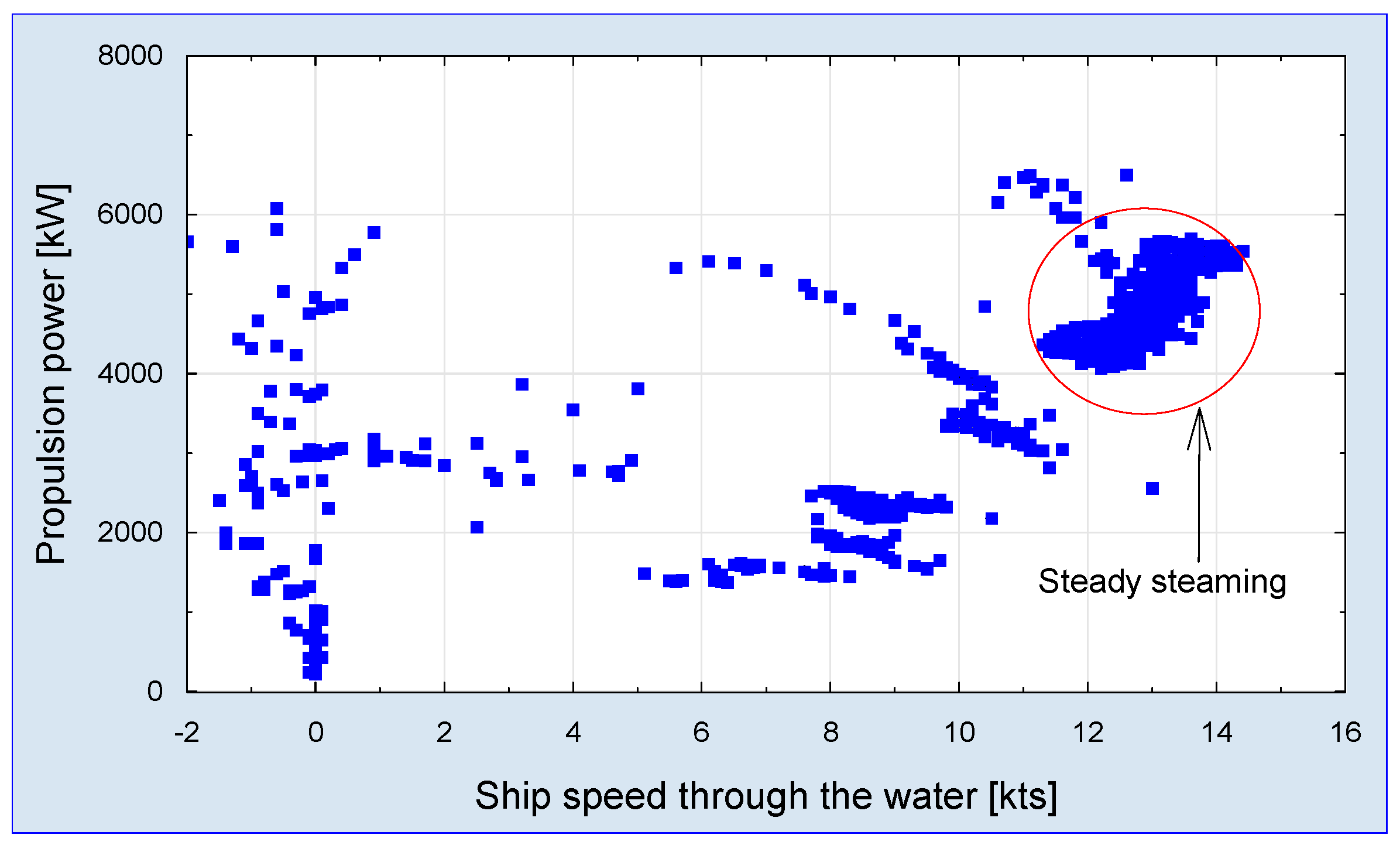
3.2. Ship Based Validation
4. Conclusions
- small system size, weight, and power consumption,
- small, minimal shaft clearance for mounting (15 cm),
- redundant wireless power transmission system with high efficiency,
- regular measurement chain calibration possibility,
- no shaft disassembly required for mounting,
- configurable communication link to higher level monitoring systems,
- user friendly GUI with data storage and post-processing functions,
- low system cost.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- RESOLUTION MEPC.272(69) (Adopted on 22 April 2016). Amendments to the Nox Technical Code 2008 Nitrogen Oxides from Marine Diesel Engines. Available online: http://www.imo.org/en/KnowledgeCentre/IndexofIMOResolutions/Marine-Environment-Protection-Committee-%28MEPC%29/Documents/MEPC.272%2869%29.pdf (accessed on 1 July 2019).
- RESOLUTION MEPC.203(62) (Adopted on 15 July 2011). Amendments to the Annex of the Protocol of 1997 to Amend the International Convention for the Prevention of Pollution from Ships, 1973, as Modified by the Protocol of 1978 Relating Thereto. Available online: http://www.ums.gov.pl/karty/IBZ/MPEC_rozdzial_4.pdf (accessed on 1 July 2019).
- RESOLUTION MEPC.215(63) (Adopted on 2 March 2012). Guidelines for Calculation of Reference Lines for Use with the Energy Efficiency Design Index (EEDI). Available online: http://www.imo.org/en/KnowledgeCentre/IndexofIMOResolutions/Marine-Environment-Protection-Committee-%28MEPC%29/Documents/MEPC.215%2863%29.pdf (accessed on 1 July 2019).
- RESOLUTION MEPC.245(66) (Adopted on 4 April 2014). 2014 Guidelines on the Method of Calculation of the Attained Energy Efficiency Design Index (EEDI) for New Ships. Available online: http://www.imo.org/en/KnowledgeCentre/IndexofIMOResolutions/Marine-Environment-Protection-Committee-(MEPC)/Documents/MEPC.245(66).pdf (accessed on 1 July 2019).
- RESOLUTION MEPC.214(63) (Adopted on 2 March 2012). 2012 Guidelines on Survey and Certification of the Energy Efficiency Design Index (EEDI). Available online: http://www.imo.org/en/KnowledgeCentre/IndexofIMOResolutions/Marine-Environment-Protection-Committee-%28MEPC%29/Documents/MEPC.214%2863%29.pdf (accessed on 1 July 2019).
- RESOLUTION MEPC.213(63) (Adopted on 2 March 2012). 2012 Guidelines for the Development of A Ship Energy Efficiency Management Plan (SEEMP). Available online: http://www.imo.org/en/KnowledgeCentre/IndexofIMOResolutions/Documents/MEPC%20-%20Marine%20Environment%20Protection/213(63).pdf (accessed on 1 July 2019).
- DIRECTIVE (EU) 2018/410 OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL of 14 March 2018 amending Directive 2003/87/EC to enhance cost-effective emission reductions and low-carbon investments, and Decision (EU) 2015/1814. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32018L0410&from=EN (accessed on 1 July 2019).
- REGULATION (EU) 2015/757 OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL of 29 April 2015 on the monitoring, reporting and verification of carbon dioxide emissions from maritime transport, and amending Directive 2009/16/EC. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:02015R0757-20161216&from=fr (accessed on 1 July 2019).
- Dzapo, H.; Stare, Z.; Bobanac, N. Digital measuring system for monitoring motor shaft parameters on ships. IEEE Trans. Instrum. Meas. 2009, 58, 3702–3712. [Google Scholar] [CrossRef]
- Petreuş, D.; Fǎrcaş, C.; Dobra, P.; Moga, D. Torque measurement system design. In Proceedings of the 2008 IEEE International Conference on Automation, Quality and Testing, Robotics, Cluj-Napoca, Romania, 22–25 May 2008. [Google Scholar] [CrossRef]
- Datum Electronics. Marine Shaft Power Meter Product Overview. Available online: www.datum-electronics.co.uk (accessed on 19 June 2019).
- Kyma, A.S. Kyma Test Power Meter. Available online: https://kyma.no/wp-content/uploads/2019/03/TPM-Kyma-test-power-meter-brochure.pdf (accessed on 19 June 2019).
- Trelleborg Marine Systems. SeaTechnik Shaft Power Meter (TSX5) for Marine Shaft Torque, Speed, Thrust and Power Measurement. Available online: www.trelleborg.com/marineandinfrastructure (accessed on 19 June 2019).
- Jin, H.H.; Lu, W.Y. Strain measurement of microsamples using laser interferometry. In Proceedings of the ASME 2006 International Mechanical Engineering Congress and Exposition. American Society of Mechanical Engineers, Chicago, IL, USA, 5–10 November 2006. [Google Scholar] [CrossRef]
- Zupan, M.; Hemker, K.J. Application of Fourier analysis to the laser based interferometric strain/displacement gage. Exp. Mech. 2002, 42, 214–220. [Google Scholar] [CrossRef]
- Zi, X.; Geng, S.; Zhao, S.; Shu, F. Measurement of short shaft power based on a digital speckle correlation method. Meas. Sci. Technol. 2015, 26. [Google Scholar] [CrossRef]
- Zi, X.; Geng, S.; Zhao, S.; Wang, Y.; Qin, W. Research on principle of saft dynamic torque measurement based on digital industrial photogrammetry technology. Chin. J. Lasers 2015, 42. [Google Scholar] [CrossRef]
- Kruger, L.; Swart, P.L.; Chtcherbakov, A.A.; van Wyk, A.J. Non-contact torsion sensor using Fibre Bragg gratings. Meas. Sci. Technol. 2004, 15, 1448–1452. [Google Scholar] [CrossRef]
- Lin, C.-J.; Ruey, C.; Yu, S.-K.; Liu, G.-X.; Hung, C.-W.; Li, H.-P. Study on Wireless Torque Measurement Using SAW Sensors. In Applied Measurement Systems; IntechOpen: Rijeka, Croatia, 2012; pp. 110–136. [Google Scholar]
- Silva, D.; Mendes, J.C.; Pereira, A.B.; Gégot, F.; Alves, L.N. Measuring torque and temperature in a rotating shaft using commercial saw sensors. Sensors 2017, 17, 1547. [Google Scholar] [CrossRef] [PubMed]
- Benoit, C.; Pages, A.; Claeyssen, F. Contactless torque sensor based on shaft torsion measurement, compatible with existing shafts. In Proceedings of the Sensoren und Messsysteme, Nürnberg, Germany, 18–19 May 2010. [Google Scholar]
- Morawski, L.; Szuca, Z. The monitoring of ship propulsion by torque and rotational speed measurements on the propeller shaft. J. Pol. CIMAC 2009, 4, 105–110. [Google Scholar]
- Yang, K.; Zhou, X.; Liao, S.; Li, L.; Qin, L. Design of a non-contact condition monitoring system for the fault diagnosis of shaft in marine propulsion system. Open Mech. Eng. J. 2012, 6. [Google Scholar] [CrossRef]
- Hoppe. MAIHAK Shaft Power Meter. Available online: https://www.hoppe-marine.com/solutions/maihak-shaft-power-meter (accessed on 19 June 2019).
- Kongsberg Maritime. Torque and Power Monitoring System for Rotating Shafts. Skipnes AS. Available online: https://www.kongsberg.com/globalassets/maritime/km-products/product-documents/metapower-torque-and-power-measurement-system (accessed on 17 June 2019).
- Leutert GmbH. Torque Measuring System TORXmeter®. Available online: https://www.leutert.com/maritime-division/en/products/torque-meter.php?lang=EN (accessed on 19 June 2019).
- Maridis GmbH. MarTorque. Torque Measurement System. Available online: https://www.maridis.de/files/brochure-download-files/brochure-download-pdf/maridis_A4_marTorque_web.pdf (accessed on 19 June 2019).
- VAF Instruments. Technical Manual T-Sense 661. Available online: https://www.vaf.nl/media/1482/tib-661-gb-0319-t-sense-valid-for-t-sense-serial-numbers-131204-and-higher.pdf?type=Manual (accessed on 19 June 2019).
- Chen, Z.; Gandhi, U.; Lee, J.; Wagoner, R.H. Variation and consistency of young’s modulus in steel. J. Mater. Process. Technol. 2016, 227, 227–243. [Google Scholar] [CrossRef]
- Germanisher Lloyd. Test Certificate for Materials; Germanisher Lloyd: Hamburg, Germany, 2004. [Google Scholar]
- DNV GL, AS. Rules for Classification Ships Part 2 Materials and Welding Chapter 2 Metallic Materials; DNV GL: Sandvika, Norway, 2015. [Google Scholar]
- Montero, W.; Farag, R.; Diaz, V.; Ramirez, D.M.; Boada, B.L. Uncertainties associated with strain-measuring systems using resistance strain gauges. J. Strain Anal. Eng. Des. 2011, 46, 1–13. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, B.; Hou, Y.; Meng, Z.; Yang, Y. Analysis and design of a 1MHz Bi-directional multi-CLLC resonant DC-DC converter with GaN devices. IEEE Trans. Ind. Electron. 2019. [Google Scholar] [CrossRef]
- Beiranvand, H.; Rokrok, E.; Liserre, M. Comparative study of heatsink volume and weight optimization in SST DAB cells employing GaN, SiC-MOSFET and Si-IGBT switches. In Proceedings of the 2019 10th International Power Electronics, Drive Systems and Technologies Conference (PEDSTC), Shiraz, Iran, 12–14 February 2019; pp. 297–302. [Google Scholar] [CrossRef]
- Bonisławski, M.; Holub, M. Double layer, printed, racetrack coil wireless power supply with receiver coil phase shift arrangement. In Proceedings of the 2018 20th European Conference on Power Electronics and Applications (EPE’18 ECCE Europe), Riga, Latvia, 17–21 September 2018; pp. 1–7. [Google Scholar]
- ITTC. Recommended Procedures and Guidelines, Full Scale Measurements Speed and Power Trials Analysis of Speed/Power Trial Data; ITTC: Zürich, Switzerland, 2005. [Google Scholar]
- ISO. Sea-Going Vessels and Marine Technology—Instructions for Planning, Carrying out and Reporting Sea Trials; ISO 19019; ISO: Geneva, Switzerland, 2005. [Google Scholar]
- ISO. Ships and Marine Technology—Guidelines for the Assessment of Speed and Power Performance by Analysis of Speed Trial Data; ISO 15016; ISO: Geneva, Switzerland, 2015. [Google Scholar]
- Recommended Practice for Ship Speed Trials; SEA TRIAL ANALYSIS JIP; Marin Report 18200-2-TM; Marin: Wageningen, The Netherlands, 2006.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Engine | |
| Type | Sulzer 6A20/24, in-line, non-reverse |
| Number of cylinder | 6 |
| Bore/Stroke [mm] | 200/240 |
| Rated engine speed [rpm] | 720 |
| Output [kW] | 397 |
| Compression ratio | 1:14 |
| Brake mean effective pressure [MPa] | 1.47 |
| Water brake | |
| Type | DPx/7D |
| Power range [kW] | 30–2200 |
| Speed [rpm] | 300–2100 |
| Dynamometer constant k [Nm/N] | 1.104 |
| force sensor FT-5367M range | 6.0 kN, accuracy class 0.6% |
| LOA | BOA | Draught | DWT | |
| Hull | 150.37 m | 23.40 m | 6.015 m | 7330 t |
| Lanes (LxWxH) | 1650 m | 3.10 m | 4.90 m | 1 Ramp |
| Engine Type | MCR | Engine Speed | Bore/Stroke | |
| 2 x | Sulzer 8ZAL 40S | 5760 kW | 510 RPM | 400/560 mm |
| Type | Ratio | Propeller Speed | PTO Power | |
| 2 x | Renk HSU-800 | 3.083 | 165.41 RPM | 850 kW |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bonisławski, M.; HOŁUB, M.; Borkowski, T.; Kowalak, P. A Novel Telemetry System for Real Time, Ship Main Propulsion Power Measurement. Sensors 2019, 19, 4771. https://doi.org/10.3390/s19214771
Bonisławski M, HOŁUB M, Borkowski T, Kowalak P. A Novel Telemetry System for Real Time, Ship Main Propulsion Power Measurement. Sensors. 2019; 19(21):4771. https://doi.org/10.3390/s19214771
Chicago/Turabian StyleBonisławski, Michał, Marcin HOŁUB, Tadeusz Borkowski, and Przemysław Kowalak. 2019. "A Novel Telemetry System for Real Time, Ship Main Propulsion Power Measurement" Sensors 19, no. 21: 4771. https://doi.org/10.3390/s19214771