A Survey on Unmanned Surface Vehicles for Disaster Robotics: Main Challenges and Directions

 , , , , , ,
, , , , , ,  and
and
Abstract
:1. Introduction
2. Groundwork
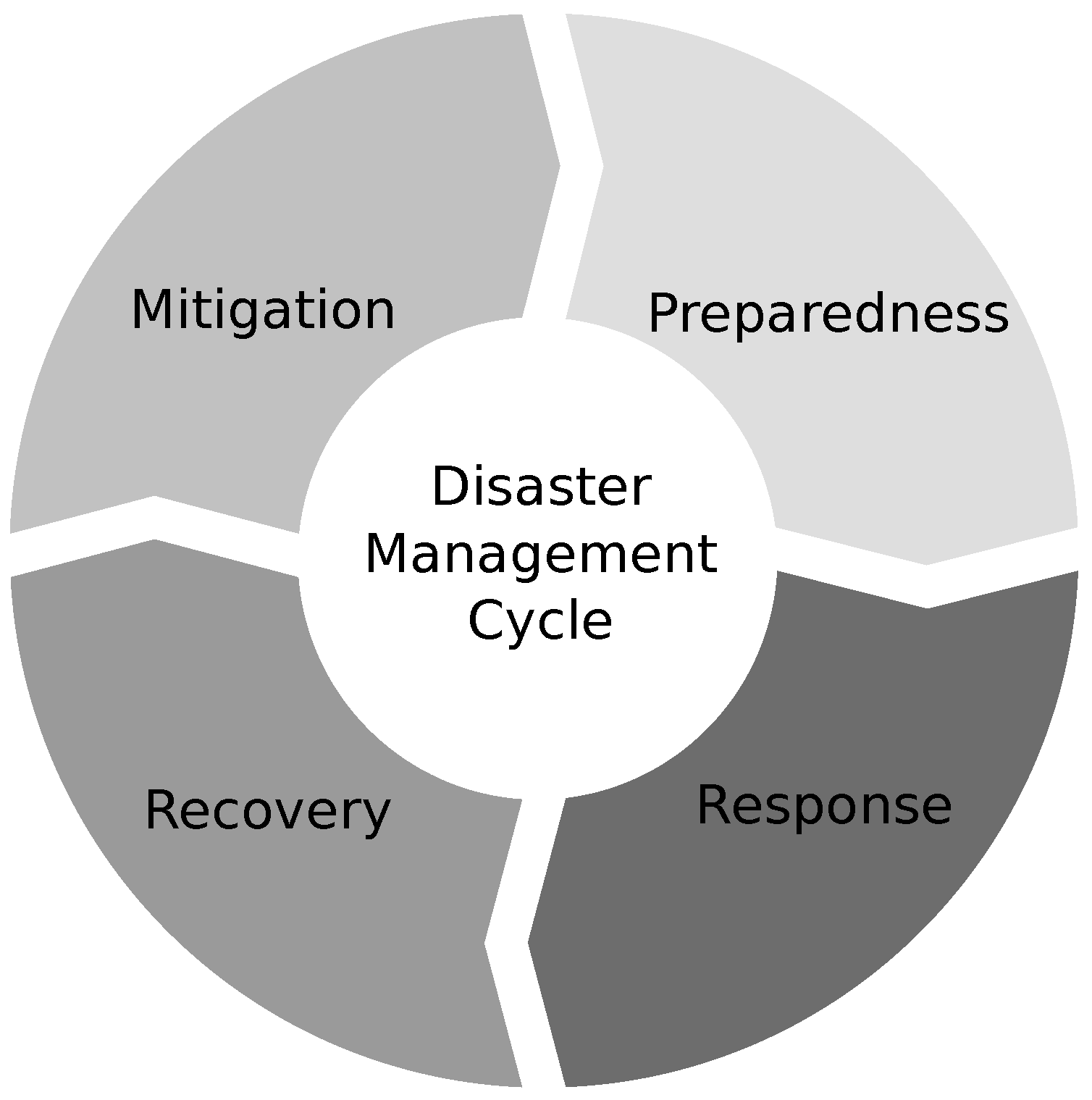
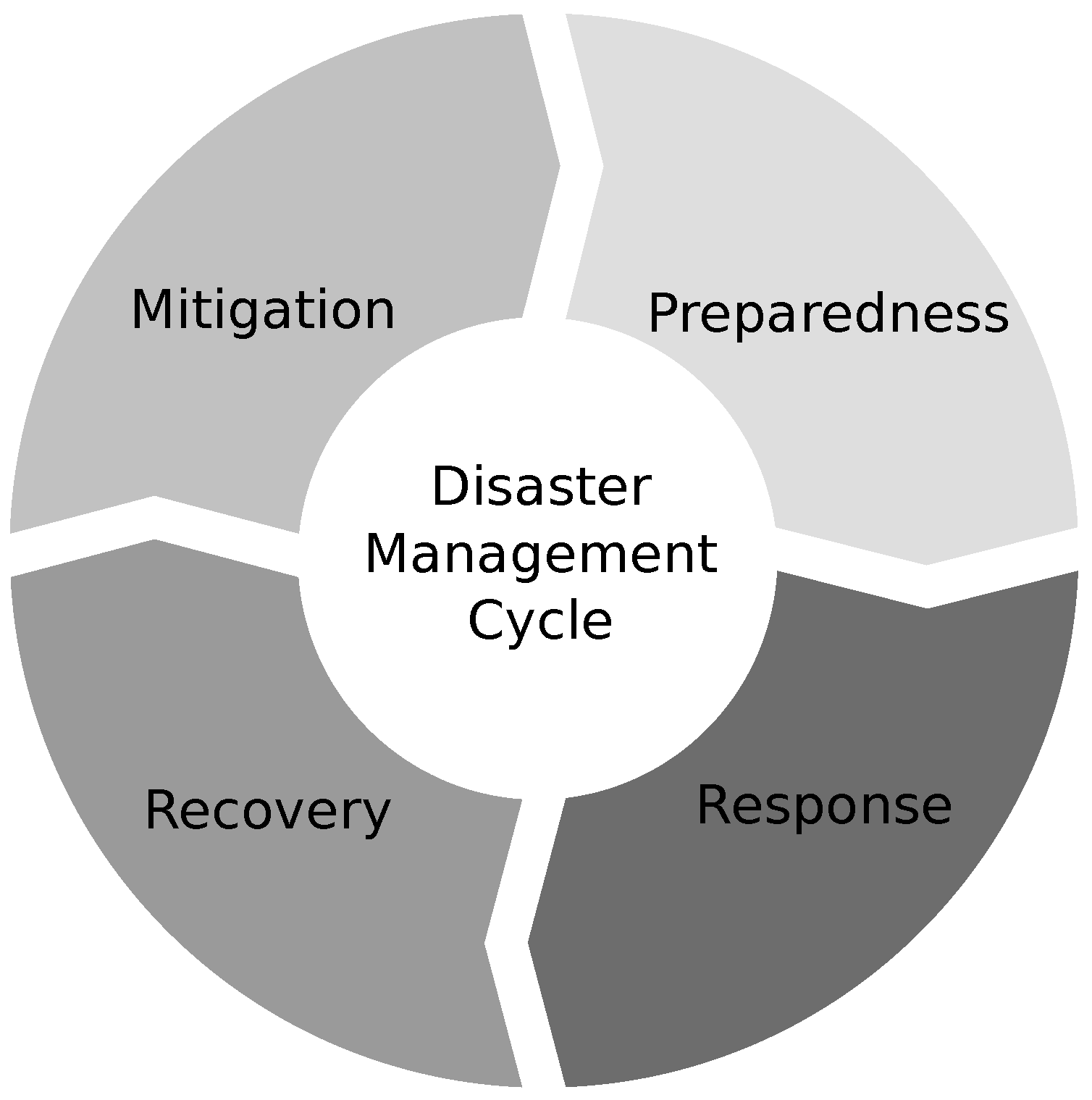
2.1. Disaster Management
- Mitigation: Actions before disaster strikes. It consists of all types of actions taken to identify vulnerabilities and reduce or eliminate the risks of future events, such as the permanent removal of affected populations from dangerous areas and reinforcing weakened structures prone to collapse.
- Preparedness: Actions before disaster strikes, strongly tied to the mitigation process. However, preparedness works with the assumption that hazards cannot be avoided entirely. The goal is to devise workarounds and preparations when the disaster occurs, such as the creation of evacuation plans, training & warning systems [17].
- Response: Immediately before, during, and after a disaster occurs. It consists but it is not limited to evacuation, rescue, and needs assessment to save lives and minimize the damages on properties.
- Recovery: Actions which take place after a disaster. They aim to reestablish life as it was before the disaster. It involves the reconstruction and monitoring of affected communities/areas.
2.2. Groundwork on Disaster Robotics
2.3. Existing Surveys about USVs
2.4. Survey Protocol
3. USVs for Natural Disasters
3.1. Earthquakes & Tsunamis
3.2. Hurricanes
3.3. Floods
3.4. Landslides & Erosion Risks
4. Use of USVs in Environmental Disasters with Contaminants
4.1. Chemical Hazards
4.1.1. Oil Spill Detection and Monitoring
4.1.2. Oil Spill Tracking
4.1.3. Oil Spill Ensnaring and Removing
4.1.4. Oil Spill Simulation
4.2. Biological Hazards
4.3. Radioactive Hazards
5. USV Applications for Preventive Maintenance and Disaster Response
5.1. Structure Inspection for Preventive Maintenance
5.2. Structure Inspection for Damage Assessment
5.3. Search and Rescue
5.3.1. USVs for SAR
5.3.2. Heterogeneous Teams of Unmanned Systems for SAR
6. Discussion
6.1. Technological Guidelines
6.2. General Guidelines
7. Contributions to the Use of USVs for Disaster Applications
7.1. Boat Prototypes
7.2. Fleet Modifications
7.3. Simulation of Scenarios Involving USVs and Floods
7.4. Proposed Control, Computer Vision, and Planning Applications
8. Conclusions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| 3D | Three Dimensional |
| COLREGS | COLlision REGulations at Sea |
| CRASAR | Center for Robotic-Assisted Search and Rescue |
| DM | Disaster Management |
| FP7 | Seventh Framework Program |
| GNC | Guidance Navigation and Control |
| GPS | Global Positioning System |
| HAB | Harmful Algal Bloom |
| ICARUS | Integrated Components for Assisted Rescue and Unmanned Search |
| LiDAR | Light Detection And Ranging |
| OASIS | Ocean-Atmosphere Sensor Integration System |
| SAR | Search and Rescue |
| UAV | Unmanned Aerial Vehicle |
| UMV | Unmanned Marine Vehicle |
| USV | Unmanned Surface Vehicle |
| UUV | Unmanned Underwater Vehicle |
References
- Bello, O.M.; Aina, Y.A. Satellite Remote Sensing as a Tool in Disaster Management and Sustainable Development: Towards a Synergistic Approach. Procedia Soc. Behav. Sci. 2014, 120, 365–373. [Google Scholar] [CrossRef]
- Taubenböck, H.; Post, J.; Roth, A.; Zosseder, K.; Strunz, G.; Dech, S. A conceptual vulnerability and risk framework as outline to identify capabilities of remote sensing. Nat. Hazards Earth Syst. Sci. 2008, 8, 409–420. [Google Scholar] [CrossRef]
- Franci, F. The Use of Satellite Remote Sensing for Flood Risk Management. Ph.D. Thesis, ALMADL University of Bologna Digital Library, Bologna, Italy, 2015. [Google Scholar] [CrossRef]
- Nuţǎ, I.; Orban, O.; Grigore, L. Development and Improvement of Technology in Emergency Response. Procedia Econ. Financ. 2015, 32, 603–609. [Google Scholar] [CrossRef]
- Bellingham, J.G.; Rajan, K. Robotics in Remote and Hostile Environments. Science 2007, 318, 1098–1102. [Google Scholar] [CrossRef]
- Coley, K. Unmanned Surface Vehicles: The Future of Data-Collection. Ocean Chall. 2015, 21, 14–15. [Google Scholar]
- Maurer, J.; Steinbauer, G.; Lepej, P.; Uran, S. TEDUSAR White Book—State of the Art in Search and Rescue Robots; Technical Report; Institute of Software Technology, Graz University of Technology: Graz, Austria, 2014. [Google Scholar]
- Mancini, A.; Frontoni, E.; Zingaretti, P. Development of a low-cost Unmanned Surface Vehicle for digital survey. In Proceedings of the 2015 European Conference on Mobile Robots (ECMR), Lincoln, UK, 2–4 September 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Osumi, H. Application of Robot Technologies to the Disaster Sites. In Report of JSME Research Committee on the Great East Japan Earthquake Disaster; The Japan Society of Mechanical Engineers: Tokyo, Japan, 29 August 2014; pp. 58–74. [Google Scholar]
- Adams, S.M.; Friedland, C.J. A survey of unmanned aerial vehicle (UAV) usage for imagery collection in disaster research and management. In Proceedings of the 9th International Workshop on Remote Sensing for Disaster Response, Stanford, CA, USA, 15–16 September 2011. [Google Scholar]
- Birk, A.; Pfingsthorn, M.; Bülow, H. Advances in underwater mapping and their application potential for Safety, Security, and Rescue Robotics (SSRR). In Proceedings of the 2012 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), College Station, TX, USA, 5–8 November 2012; pp. 1–3. [Google Scholar] [CrossRef]
- Busby, R.F. Chapter 2 Unmanned Submersibles. In Submersibles and Their Use in Oceanography and Ocean Engineering; Geyer, R.A., Ed.; Elsevier: Amsterdam, The Netherlands, 1977; Volume 17, pp. 23–59. [Google Scholar] [CrossRef]
- Matias, B.; Oliveira, H.; Almeida, J.; Dias, A.; Ferreira, H.; Martins, A.; Silva, E. High-accuracy low-cost RTK-GPS for an unmannned surface vehicle. In Proceedings of the OCEANS 2015, Genova, Italy, 18–21 May 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Han, J.; Park, J.; Kim, J.; Son, N.-S. GPS-less Coastal Navigation using Marine Radar for USV Operation. IFAC-PapersOnLine 2016, 49, 598–603. [Google Scholar] [CrossRef]
- Kartha, J.J.; Jacob, L. Delay and Lifetime Performance of Underwater Wireless Sensor Networks with Mobile Element Based Data Collection. Int. J. Distrib. Sen. Netw. 2015, 2015. [Google Scholar] [CrossRef]
- Luo, H.; Wu, K.; Ruby, R.; Hong, F.; Guo, Z.; Ni, L.M. Simulation and Experimentation Platforms for Underwater Acoustic Sensor Networks: Advancements and Challenges. ACM Comput. Surv. 2017, 50, 28. [Google Scholar] [CrossRef]
- Perry, R.W.; Lindell, M.K.; Tierney, K.J. Facing the Unexpected: Disaster Preparedness and Response in the United States; Joseph Henry Press: Washington, DC, USA, 2001. [Google Scholar]
- Murphy, R.R. Disaster Robotics; MIT Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Bogue, R. Search and rescue and disaster relief robots: Has their time finally’ come? Ind. Robot Int. J. Robot. Res. Appl. 2016, 43, 138–143. [Google Scholar] [CrossRef]
- Wong, C.; Yang, E.; Yan, X.T.; Gu, D. An overview of robotics and autonomous systems for harsh environments. In Proceedings of the 2017 23rd International Conference on Automation and Computing (ICAC), Huddersfield, UK, 7–8 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Cubber, G.D.; Doroftei, D.; Rudin, K.; Berns, K.; Matos, A.; Serrano, D.; Sanchez, J.; Govindaraj, S.; Bedkowski, J.; Roda, R.; et al. Introduction to the Use of Robotic Tools for Search and Rescue. In Search and Rescue Robotics; IntechOpen: London, UK, 2017; pp. 1–17. [Google Scholar] [CrossRef]
- Fossen, T.I. A survey on Nonlinear Ship Control: From Theory to Practice. IFAC Proc. Vol. 2000, 33, 1–16. [Google Scholar] [CrossRef]
- Caccia, M. Autonomous Surface Craft: Prototypes and basic research issues. In Proceedings of the 2006 14th Mediterranean Conference on Control and Automation, Ancona, Italy, 28–30 June 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Bertram, V. Unmanned Surface Vehicles-a Survey; Skibsteknisk Selskab: Copenhagen, Denmark, 2008; Volume 1, pp. 1–14. [Google Scholar]
- Manley, J.E. Unmanned surface vehicles, 15 years of development. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–4. [Google Scholar] [CrossRef]
- Ashrafiuon, H.; Muske, K.R.; McNinch, L.C. Review of nonlinear tracking and setpoint control approaches for autonomous underactuated marine vehicles. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 5203–5211. [Google Scholar] [CrossRef]
- Yan, R.J.; Pang, S.; Sun, H.B.; Pang, Y.J. Development and missions of unmanned surface vehicle. J. Mar. Sci. Appl. 2010, 9, 451–457. [Google Scholar] [CrossRef]
- Motwani, A. A survey of uninhabited surface vehicles. In Marine and Industrial Dynamic Analysis; Technical Report; Plymouth University: Plymouth, UK, 22 April 2012. [Google Scholar]
- Campbell, S.; Naeem, W.; Irwin, G. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres. Annu. Rev. Control 2012, 36, 267–283. [Google Scholar] [CrossRef]
- Rodriquez, D.; Franklin, M.; Byrne, C. A Study of the Feasibility of Autonomous Surface Vehicles; Worcester Polytechnic Institute: Worcester, MA, USA, 2012. [Google Scholar]
- Othman, E.H. A Review on Current Design of Unmanned Surface Vehicles (USVs). J. Adv. Rev. Sci. Res. 2015, 16, 12–17. [Google Scholar]
- Qi, A.C.; Han, Q.L.; Wang, Y.L. A survey of motion control for marine vehicles. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 4214–4218. [Google Scholar] [CrossRef]
- Azzeri, M.; Adnan, F.; Zain, M.M. Review of course keeping control system for unmanned surface vehicle. J. Teknol. 2015, 74, 11–20. [Google Scholar] [CrossRef]
- Casalino, G.; Allotta, B.; Antonelli, G.; Caiti, A.; Conte, G.; Indiveri, G.; Melchiorri, C.; Simetti, E. ISME research trends: Marine robotics for emergencies at sea. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Kumru, M.; Leblebicioglu, K.; Erunsal, I.K.; Ahiska, K. A survey on tactical control algorithms for path tracking unmanned surface vehicles. In Proceedings of the 2016 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand, 13–15 November 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Schiaretti, M.; Chen, L.; Negenborn, R.R. Survey on Autonomous Surface Vessels: Part I—A New Detailed Definition of Autonomy Levels. In Proceedings of the International Conference on Computational Logistics, Southampton, UK, 18–20 October 2017; Bektaş, T., Coniglio, S., Martinez-Sykora, A., Voss, S., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 219–233. [Google Scholar] [CrossRef]
- Schiaretti, M.; Chen, L.; Negenborn, R.R. Survey on Autonomous Surface Vessels: Part II– Categorization of 60 Prototypes and Future Applications. In Proceedings of the International Conference on Computational Logistics, Southampton, UK, 18–20 October 2017; Bektaş, T., Coniglio, S., Martinez-Sykora, A., Voss, S., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 234–252. [Google Scholar] [CrossRef]
- Shi, Y.; Shen, C.; Fang, H.; Li, H. Advanced Control in Marine Mechatronic Systems: A Survey. IEEE/ASME Trans. Mech. 2017, 22, 1121–1131. [Google Scholar] [CrossRef]
- Liu, Y.; Bucknall, R. A survey of formation control and motion planning of multiple unmanned vehicles. Robotica 2018, 36, 1019–1047. [Google Scholar] [CrossRef]
- Moud, H.I.; Shojaei, A.; Flood, I. Current and Future Applications of Unmanned Surface, Underwater, and Ground Vehicles in Construction. In Proceedings of the Construction Research Congress 2018 (CRC 2018), New Orleans, LA, USA, 2–4 April 2018; pp. 106–115. [Google Scholar]
- Bayat, B.; Crasta, N.; Crespi, A.; Pascoal, A.M.; Ijspeert, A. Environmental monitoring using autonomous vehicles: A survey of recent searching techniques. Curr. Opin. Biotechnol. 2017, 45, 76–84. [Google Scholar] [CrossRef]
- Marques, F.; Lourenço, A.; Mendonça, R.; Pinto, E.; Rodrigues, P.; Santana, P.; Barata, J. A critical survey on marsupial robotic teams for environmental monitoring of water bodies. In Proceedings of the OCEANS 2015, Genova, Italy, 19–22 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Dunbabin, M.; Marques, L. Robotics for Environmental Monitoring: Significant Advancements and Applications. IEEE Robot. Autom. Mag. 2012, 19, 24–39. [Google Scholar] [CrossRef]
- Lattanzi, D.; Miller, G. Review of Robotic Infrastructure Inspection Systems. J. Infrastruct. Syst. 2017, 23, 04017004. [Google Scholar] [CrossRef]
- Thompson, F.; Guihen, D. Review of mission planning for autonomous marine vehicle fleets. J. Field Robot. 2018. [Google Scholar] [CrossRef]
- Xiang, X.; Yu, C.; Lapierre, L.; Zhang, J.; Zhang, Q. Survey on Fuzzy-Logic-Based Guidance and Control of Marine Surface Vehicles and Underwater Vehicles. Int. J. Fuzzy Syst. 2018, 20, 572–586. [Google Scholar] [CrossRef]
- Zereik, E.; Bibuli, M.; Mišković, N.; Ridao, P.; Pascoal, A. Challenges and future trends in marine robotics. Annu. Rev. Control 2018, 46, 350–368. [Google Scholar] [CrossRef]
- Murphy, R.R. A decade of rescue robots. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 5448–5449. [Google Scholar] [CrossRef]
- Sánchez-García, J.; García-Campos, J.; Arzamendia, M.; Reina, D.; Toral, S.; Gregor, D. A survey on unmanned aerial and aquatic vehicle multi-hop networks: Wireless communications, evaluation tools and applications. Comput. Commun. 2018, 119, 43–65. [Google Scholar] [CrossRef]
- Murphy, R.R.; Tadokoro, S.; Nardi, D.; Jacoff, A.; Fiorini, P.; Choset, H.; Erkmen, A.M. Search and Rescue Robotics. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1151–1173. [Google Scholar] [CrossRef]
- Wohlin, C. Guidelines for Snowballing in Systematic Literature Studies and a Replication in Software Engineering. In Proceedings of the 18th International Conference on Evaluation and Assessment in Software Engineering, London, UK, 13–14 May 2014; pp. 38:1–38:10. [Google Scholar]
- Takahashi, N.; Ishihara, Y.; Fukuda, T.; Ochi, H.; Tahara, J.; Mori, T.; Deguchi, M.; Kido, M.; Ohta, Y.; Hino, R.; et al. Buoy Platform Development for Observation of Tsunami and Crustal Deformation. In Proceedings of the International Symposium on Geodesy for Earthquake and Natural Hazards (GENAH), Matsushima, Japan, 22–26 July 2014; pp. 97–103. [Google Scholar] [CrossRef]
- Takahashi, N.; Ishihara, Y.; Ochi, H.; Fukuda, T.; Tahara, J.; Maeda, Y.; Kido, M.; Ohta, Y.; Mutoh, K.; Hashimoto, G.; et al. New buoy observation system for tsunami and crustal deformation. Mar. Geophys. Res. 2014, 35, 243–253. [Google Scholar] [CrossRef]
- Kido, M.; Fujimoto, H.; Hino, R.; Ohta, Y.; Osada, Y.; Iinuma, T.; Azuma, R.; Wada, I.; Miura, S.; Suzuki, S.; et al. Progress in the Project for Development of GPS/Acoustic Technique Over the Last 4 Years. In Proceedings of the International Symposium on Geodesy for Earthquake and Natural Hazards (GENAH), Matsushima, Japan, 22–26 July 2014; pp. 3–10. [Google Scholar] [CrossRef]
- Sukhovich, A.; Bonnieux, S.; Hello, Y.; Irisson, J.O.; Simons, F.J.; Nolet, G. Seismic monitoring in the oceans by autonomous floats. Nat. Commun. 2015, 6, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Berger, J.; Laske, G.; Babcock, J.; Orcutt, J. An ocean bottom seismic observatory with near real-time telemetry. Earth Space Sci. 2016, 3, 68–77. [Google Scholar] [CrossRef]
- Berger, J.; Orcutt, J.; Laske, G.; Babcock, J. RIO ROSO a Robotically Installed and Online Remote Ocean Seafloor Observatory. In Proceedings of the OCEANS 2016 MTS/IEEE, Monterey, CA, USA, 19–23 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Carragher, P.; Hine, G.; Legh-Smith, P.; Mayville, J.; Nelson, R.; Pai, S.; Parnum, I.; Shone, P.; Smith, J.; Tichatschke, C. A new platform for offshore exploration and production. Oilfield Rev. 2014, 25, 40–50. [Google Scholar]
- Maqueda, M.A.M.; Penna, N.T.; Williams, S.D.P.; Foden, P.R.; Martin, I.; Pugh, J. Water Surface Height Determination with a GPS Wave Glider: A Demonstration in Loch Ness, Scotland. J. Atmos. Ocean. Technol. 2016, 33, 1159–1168. [Google Scholar] [CrossRef]
- Murphy, R.R.; Steimle, E.; Griffin, C.; Cullins, C.; Hall, M.; Pratt, K. Cooperative use of unmanned sea surface and micro aerial vehicles at Hurricane Wilma. J. Field Robot. 2008, 25, 164–180. [Google Scholar] [CrossRef]
- Steimle, E.T.; Murphy, R.R.; Lindemuth, M.; Hall, M.L. Unmanned marine vehicle use at Hurricanes Wilma and Ike. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 27–29 October 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Murphy, R.R.; Steimle, E.; Hall, M.; Lindemuth, M.; Trejo, D.; Hurlebaus, S.; Medina-Cetina, Z.; Slocum, D. Robot-assisted bridge inspection after Hurricane Ike. In Proceedings of the 2009 IEEE International Workshop on Safety, Security Rescue Robotics (SSRR 2009), Denver, CO, USA, 3–6 November 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Murphy, R.R.; Steimle, E.; Hall, M.; Lindemuth, M.; Trejo, D.; Hurlebaus, S.; Medina-Cetina, Z.; Slocum, D. Robot-Assisted Bridge Inspection. J. Intell. Robot. Syst. 2011, 64, 77–95. [Google Scholar] [CrossRef]
- Patterson, M.; Marston, R.; Christopher, S.; Jacobs, A.; McDonald, A.; Nicinska, J.; Chadwick, R. Control of tactical-scale, micro-unmanned surface vehicles (USVs): Ocean observations platforms systems and observations. In Proceedings of the 2012 Oceans, Hampton Roads, VA, USA, 14–19 October 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Patterson, M.C.L.; Mulligan, A.; Boiteux, F. Safety and security applications for micro-unmanned surface vessels. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 23–27 September 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Lenain, L.; Melville, W.K. Autonomous surface vehicle measurements of the ocean’s response to Tropical Cyclone Freda. J. Atmos. Ocean. Technol. 2014, 31, 2169–2190. [Google Scholar] [CrossRef]
- Fitzpatrick, P.J.; Lau, Y.; Moorhead, R.; Skarke, A.; Merritt, D.; Kreider, K.; Brown, C.; Carlon, R.; Hine, G.; Lampoudi, T.; et al. A Review of the 2014 Gulf of Mexico Wave Glider Field Program. Mar. Technol. Soc. J. 2015, 49, 64–71. [Google Scholar] [CrossRef]
- Mitarai, S.; McWilliams, J.C. Wave glider observations of surface winds and currents in the core of Typhoon Danas. Geophys. Res. Lett. 2016, 43, 11312–11319. [Google Scholar] [CrossRef]
- Scerri, P.; Kannan, B.; Velagapudi, P.; Macarthur, K.; Stone, P.; Taylor, M.; Dolan, J.; Farinelli, A.; Chapman, A.; Dias, B.; et al. Flood Disaster Mitigation: A Real-World Challenge Problem for Multi-agent Unmanned Surface Vehicles. In Proceedings of the Advanced Agent Technology: AAMAS 2011 Workshops, AMPLE, AOSE, ARMS, DOCM3AS, ITMAS, Taipei, Taiwan, 2–6 May 2011; pp. 252–269. [Google Scholar] [CrossRef]
- Scerri, P.; Velagapudi, P.; Kannan, B.; Valada, A.; Tomaszewski, C.; Dolan, J.; Scerri, A.; Shankar, K.S.; Bill, L.; Kantor, G. Real-world Testing of a Multi-robot Team. In Proceedings of the 11th International Conference on Autonomous Agents and Multiagent Systems (AAMAS ’12)—Volume 3; International Foundation for Autonomous Agents and Multiagent Systems: Richland, SC, USA, 2012; pp. 1213–1214. [Google Scholar]
- Mancini, A.; Frontoni, E.; Zingaretti, P.; Longhi, S. High-resolution mapping of river and estuary areas by using unmanned aerial and surface platforms. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 534–542. [Google Scholar] [CrossRef]
- Zhang, J.; Xiong, J.; Zhang, G.; Gu, F.; He, Y. Flooding disaster oriented USV UAV system development demonstration. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Xiong, J.; Gu, F.; Li, D.; He, Y.; Han, J. Design, Implementation and Modeling of Flooding Disaster-Oriented USV. In Recent Advances in Robotic Systems; Wang, G., Ed.; InTech: Rijeka, Croatia, 2016; Chapter 02. [Google Scholar] [CrossRef]
- Li, C.; Weeks, E.; Huang, W.; Milan, B.; Wu, R. Weather-Induced Transport through a Tidal Channel Calibrated by an Unmanned Boat. J. Atmos. Ocean. Technol. 2018, 35, 261–279. [Google Scholar] [CrossRef]
- Ferreira, H.; Almeida, C.; Martins, A.; Almeida, J.; Dias, N.; Dias, A.; Silva, E. Autonomous bathymetry for risk assessment with ROAZ robotic surface vehicle. In Proceedings of the OCEANS 2009-EUROPE, Bremen, Germany, 11–14 May 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Bio, A.; Bastos, L.; Granja, H.; Pinho, J.; Gonçalves, J.; Henriques, R.; Madeira, S.; Magalhães, A.; Rodrigues, D. Methods for coastal monitoring and erosion risk assessment: Two Portuguese case studies. Rev. Gest. Costeira Integr. J. Integr. Coast. Zone Manag. 2015, 15, 47–63. [Google Scholar] [CrossRef]
- Goldenberg, S.B.; Landsea, C.W.; Mestas-Nuñez, A.M.; Gray, W.M. The Recent Increase in Atlantic Hurricane Activity: Causes and Implications. Science 2001, 293, 474–479. [Google Scholar] [CrossRef]
- Lindemuth, M.; Murphy, R.; Steimle, E.; Armitage, W.; Dreger, K.; Elliot, T.; Hall, M.; Kalyadin, D.; Kramer, J.; Palankar, M.; et al. Sea Robot-Assisted Inspection. IEEE Robot. Autom. Mag. 2011, 18, 96–107. [Google Scholar] [CrossRef]
- Manley, J.; Willcox, S. The Wave Glider: A persistent platform for ocean science. In Proceedings of the OCEANS 2010 IEEE, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Daniel, T.; Manley, J.; Trenaman, N. The Wave Glider: Enabling a new approach to persistent ocean observation and research. Ocean Dyn. 2011, 61, 1509–1520. [Google Scholar] [CrossRef]
- Sullivan, P.P.; Romero, L.; McWilliams, J.C.; Melville, W.K. Transient Evolution of Langmuir Turbulence in Ocean Boundary Layers Driven by Hurricane Winds and Waves. J. Phys. Oceanogr. 2012, 42, 1959–1980. [Google Scholar] [CrossRef]
- Murphy, R.R.; Stover, S. Field studies of safety security rescue technologies through training and response activities. Proc. SPIE 2006, 6230, 62300M. [Google Scholar] [CrossRef]
- Jonkman, S.N. Global Perspectives on Loss of Human Life Caused by Floods. Nat. Hazards 2005, 34, 151–175. [Google Scholar] [CrossRef]
- Jongman, B.; Ward, P.J.; Aerts, J.C. Global exposure to river and coastal flooding: Long term trends and changes. Glob. Environ. Chang. 2012, 22, 823–835. [Google Scholar] [CrossRef]
- Micallef, A. Chapter Thirteen—Marine Geomorphology: Geomorphological Mapping and the Study of Submarine Landslides. In Geomorphological Mapping; Smith, M.J., Paron, P., Griffiths, J.S., Eds.; Developments in Earth Surface Processes; Elsevier: Amsterdam, The Netherlands, 2011; Volume 15, pp. 377–395. [Google Scholar] [CrossRef]
- Talling, P.J. On the triggers, resulting flow types and frequencies of subaqueous sediment density flows in different settings. Mar. Geol. 2014, 352, 155–182. [Google Scholar] [CrossRef]
- Nicholson, H.A. Coastal Monitoring; Technical Report; Allen Institute for Artifitial Intelligence: Seattle, WA, USA, 2014. [Google Scholar]
- Han, J.; Kim, J. Navigation of an unmanned surface vessel under bridges. In Proceedings of the 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, South Korea, 30 October–2 November 2013; pp. 206–210. [Google Scholar] [CrossRef]
- Yang, W.R.; Chen, C.Y.; Hsu, C.M.; Tseng, C.J.; Yang, W.C. Multifunctional Inshore Survey Platform with Unmanned Surface Vehicles. Int. J. Autom. Smart Technol. 2011, 1. [Google Scholar] [CrossRef]
- Martins, A.; Ferreira, H.; Almeida, C.; Silva, H.; Almeida, J.M.; Silva, E. Roaz and Roaz II Autonomous Surface Vehicle Design and Implementation. In Proceedings of the International Lifesaving Congress 2007, Porto, Portugal, January 2007. [Google Scholar]
- Akyuz, E.; Ilbahar, E.; Cebi, S.; Celik, M. Maritime Environmental Disaster Management Using Intelligent Techniques. In Intelligence Systems in Environmental Management: Theory and Applications; Springer International Publishing: Cham, Switzerland, 2017; pp. 135–155. [Google Scholar] [CrossRef]
- Vasilijevic, A.; Nad, D.; Mandic, F.; Miskovic, N.; Vukic, Z. Coordinated Navigation of Surface and Underwater Marine Robotic Vehicles for Ocean Sampling and Environmental Monitoring. IEEE/ASME Trans. Mech. 2017, 22, 1174–1184. [Google Scholar] [CrossRef]
- Dalgleish, F.; Ouyang, B.; Vuorenkoski, A.K.; Thomas, J.C.; Carragher, P.D. Towards Persistent Real-Time Autonomous Surveillance and Mapping of Surface Hydrocarbons. In Proceedings of the 2013 Offshore Technology Conference, Houston, TX, USA, 6–9 May 2013. [Google Scholar]
- Kim, Y.H.; Lee, S.W.; Yang, H.S.; Shell, D.A. Toward autonomous robotic containment booms: Visual servoing for robust inter-vehicle docking of surface vehicles. Intell. Serv. Robot. 2012, 5, 1–18. [Google Scholar] [CrossRef]
- Becker, C.J. Control Strategy for Autonomous Remediation of Marine Oil Spills. Master’s Thesis, Boston University, Boston, MA, USA, 2013. [Google Scholar]
- Peng, Z.; Wang, J.; Wang, D. Distributed Containment Maneuvering of Multiple Marine Vessels via Neurodynamics-Based Output Feedback. IEEE Trans. Ind. Electron. 2017, 64, 3831–3839. [Google Scholar] [CrossRef]
- Samuelides, M.; Ventikos, N.; Gemelos, I. Survey on Grounding Incidents: Statistical Analysis and Risk Assessment. Ships Offshore Struct. 2009, 4, 55–68. [Google Scholar] [CrossRef]
- Burger, J. Oil Spills; Rutgers University Press: New Brunswick, NJ, USA, 1997; p. 280. [Google Scholar]
- Zhong, Z.; You, F. Oil spill response planning with consideration of physicochemical evolution of the oil slick: A multiobjective optimization approach. Comput. Chem. Eng. 2011, 35, 1614–1630. [Google Scholar] [CrossRef]
- Guerrero-González, A.; García-Córdova, F.; Ortiz, F.J.; Alonso, D.; Gilabert, J. A multirobot platform based on autonomous surface and underwater vehicles with bio-inspired neurocontrollers for long-term oil spills monitoring. Auton. Robots 2016, 40, 1321–1342. [Google Scholar] [CrossRef]
- Ferri, G.; Manzi, A.; Fornai, F.; Mazzolai, B.; Laschi, C.; Ciuchi, F.; Dario, P. Design, fabrication and first sea trials of a small-sized autonomous catamaran for heavy metals monitoring in coastal waters. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2406–2411. [Google Scholar] [CrossRef]
- Ferri, G.; Manzi, A.; Fornai, F.; Ciuchi, F.; Laschi, C. The HydroNet ASV, a Small-Sized Autonomous Catamaran for Real-Time Monitoring of Water Quality: From Design to Missions at Sea. IEEE J. Ocean. Eng. 2015, 40, 710–726. [Google Scholar] [CrossRef]
- Mukhopadhyay, S.; Wang, C.; Bradshaw, S.; Bazie, V.; Maxon, S.; Hicks, L.; Patterson, M.; Zhang, F. Controller Performance of Marine Robots in Reminiscent Oil Surveys. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 7–12 October 2012; pp. 1766–1771. [Google Scholar] [CrossRef]
- Liu, D.; Luan, X.; Zhang, F.; Jin, J.; Guo, J.; Zheng, R. An USV-based laser fluorosensor for oil spill detection. In Proceedings of the 2016 10th International Conference on Sensing Technology (ICST), Nanjing, China, 11–13 November 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Fornai, F.; Ferri, G.; Manzi, A.; Ciuchi, F.; Bartaloni, F.; Laschi, C. An Autonomous Water Monitoring and Sampling System for Small-Sized ASVs. IEEE J. Ocean. Eng. 2017, 42, 5–12. [Google Scholar] [CrossRef]
- Vasilijevic, A.; Calado, P.; Lopez-Castejon, F.; Hayes, D.; Stilinovic, N.; Nad, D.; Mandic, F.; Dias, P.; Gomes, J.; Molina, J.C.; et al. Heterogeneous robotic system for underwater oil spill survey. In Proceedings of the OCEANS 2015, Genova, Italy, 18–21 May 2015; pp. 1–7. [Google Scholar]
- Ziegwied, A.T.; Dobbin, V.; Dyer, S.; Pierpoint, C.; Sidorovskaia, N. Using Autonomous Surface Vehicles for Passive Acoustic Monitoring (PAM). In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Kato, N.; Senga, H.; Suzuki, H.; Okano, Y.; Ban, T.; Takagi, Y.; Yoshie, M.; Tanaka, T.; Sakagami, N. Autonomous Spilled Oil and Gas Tracking Buoy System and Application to Marine Disaster Prevention System: Part 1. In Proceedings of the SPE Annual Technical Conference and Exhibition. Society of Petroleum Engineers, San Antonio, TX, USA, 8–10 October 2012; pp. 1–3. [Google Scholar] [CrossRef]
- Kato, N. (Ed.) Applications to Marine Disaster Prevention: Spilled Oil and Gas Tracking Buoy System, 1st ed.; Springer: Tokyo, Japan, 2017; p. 201. [Google Scholar] [CrossRef]
- Senga, H.; Kato, N.; Yu, L.; Yoshie, M.; Tanaka, T. Verification experiments of sail control effects on tracking oil spill. In Proceedings of the 2012 Oceans, Yeosu, Korea, 21–24 May 2012; pp. 1–7. [Google Scholar] [CrossRef]
- Senga, H.; Kato, N.; Suzuki, H.; Akamatsu, T.; Yu, L.; Yoshie, M.; Tanaka, T. Field experiments and new design of a spilled oil tracking autonomous buoy. J. Mar. Sci. Technol. 2014, 19, 90–102. [Google Scholar] [CrossRef]
- Rathour, S.S.; Kato, N.; Tanabe, N.; Senga, H.; Hirai, Y.; Yoshie, M.; Tanaka, T. Spilled Oil Autonomous Tracking Using Autonomous Sea Surface Vehicle. Mar. Technol. Soc. J. 2015, 49, 102–116. [Google Scholar] [CrossRef]
- Rathour, S.S.; Kato, N.; Tanabe, N.; Senga, H.; Yoshie, M.; Tanaka, T. Sea Experiments on Autonomous tracking of Oil Spill using a Robotic Platform. In Proceedings of the 23rd Ocean Engineering Symposium, Tokyo, Japan, August 2015. [Google Scholar]
- Fahad, M.; Saul, N.; Guo, Y.; Bingham, B. Robotic simulation of dynamic plume tracking by Unmanned Surface Vessels. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2654–2659. [Google Scholar] [CrossRef]
- Saldaña, D.; Assunção, R.; Hsieh, M.A.; Campos, M.F.M.; Kumar, V. Cooperative prediction of time-varying boundaries with a team of robots. In Proceedings of the 2017 International Symposium on Multi-Robot and Multi-Agent Systems (MRS), Los Angeles, CA, USA, 4–5 December 2017; pp. 9–16. [Google Scholar] [CrossRef]
- Fahad, M.; Guo, Y.; Bingham, B.; Krasnosky, K.; Fitzpatrick, L.; Sanabria, F.A. Evaluation of ocean plume characteristics using unmanned surface vessels. In Proceedings of the OCEANS 2017, Anchorage, AK, USA, 18–21 September 2017; pp. 1–7. [Google Scholar]
- Arrichiello, F.; Heidarsson, H.; Chiaverini, S.; Sukhatme, G.S. Cooperative caging using autonomous aquatic surface vehicles. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4763–4769. [Google Scholar] [CrossRef]
- Arrichiello, F.; Heidarsson, H.K.; Chiaverini, S.; Sukhatme, G.S. Cooperative caging and transport using autonomous aquatic surface vehicles. Intell. Serv. Robot. 2012, 5, 73–87. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Heidarsson, H.; Sukhatme, G.S.; Kumar, V. Cooperative control of autonomous surface vehicles for oil skimming and cleanup. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2374–2379. [Google Scholar] [CrossRef]
- Pereda, F.J.; de Marina, H.G.; Giron-Sierra, J.M.; Jimenez, J. Towards automatic oil spill confinement with Autonomous Marine Surface Vehicles. In Proceedings of the OCEANS 2011 IEEE, Santander, Spain, 6–9 June 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Boulougouris, E.; Papanikolaou, A.; Le Corre, Y.; Ghozlan, F.; Turan, O.; Kakalis, N.; Ventikos, Y.; Fritsch, D.; Campos, V.; Ventikos, N. Efficient Oil Spill Confrontation by Innovative EUMOP Units. In Proceedings of the International Symposium on Maritime Safety, Security and Environmental Protection, Athens, Greece, 20–21 September 2007. [Google Scholar]
- Kakalis, N.M.; Ventikos, Y. Robotic swarm concept for efficient oil spill confrontation. J. Hazard. Mater. 2008, 154, 880–887. [Google Scholar] [CrossRef]
- Giron-Sierra, J.M.; Gheorghita, A.T.; Jiménez, J.F. Fully automatic boom towing by unmanned ships: Experimental study. In Proceedings of the OCEANS 2015—MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–10. [Google Scholar] [CrossRef]
- Giron-Sierra, J.M.; Gheorghita, A.T.; Angulo, G.; Jimenez, J.F. Preparing the automatic spill recovery by two unmanned boats towing a boom: Development with scale experiments. Ocean Eng. 2015, 95, 23–33. [Google Scholar] [CrossRef]
- Wang, G.; Zeng, Z.; Wang, H.; Zhang, L.; Sun, X.; He, Y.; Li, L.; Wu, X.; Ren, T.; Xue, Q. Low Drag Porous Ship with Superhydrophobic and Superoleophilic Surface for Oil Spills Cleanup. ACS Appl. Mater. Interfaces 2015, 7, 26184–26194. [Google Scholar] [CrossRef]
- Wang, J.; Ren, F.; Li, Z.; Liu, Z.; Zheng, X.; Yang, Y. Unmanned surface vessel for monitoring and recovering of spilled oil on water. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Nedwed, T. Recent Advances in Oil Spill Response Technologies. In Proceedings of the International Petroleum Technology Conference (IPTC 2013), Beijing, China, 26–28 March 2013. [Google Scholar] [CrossRef]
- Paine, R.T.; Ruesink, J.L.; Sun, A.; Soulanille, E.L.; Wonham, M.J.; Harley, C.D.G.; Brumbaugh, D.R.; Secord, D.L. Trouble on Oiled Waters: Lessons from the Exxon Valdez Oil Spill. Annu. Rev. Ecol. Syst. 1996, 27, 197–235. [Google Scholar] [CrossRef]
- Sammarco, P.W.; Kolian, S.R.; Warby, R.A.; Bouldin, J.L.; Subra, W.A.; Porter, S.A. Distribution and concentrations of petroleum hydrocarbons associated with the BP/Deepwater Horizon Oil Spill, Gulf of Mexico. Mar. Pollut. Bull. 2013, 73, 129–143. [Google Scholar] [CrossRef] [PubMed]
- Nand Jha, M.; Jason, L.; Gao, Y. Advances in Remote Sensing for Oil Spill Disaster Management: State-of-the-Art Sensors Technology for Oil Spill Surveillance. Sensors 2008, 8, 236–255. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 83, 9–23. [Google Scholar] [CrossRef] [PubMed]
- Naeem, W.; Sutton, R.; Chudley, J. Modelling and control of an unmanned surface vehicle for environmental monitoring. In Proceedings of the UKACC International Control Conference, Glasgow, Scotland, UK, 30 August–1 September 2006; pp. 1–6. [Google Scholar]
- Choyekh, M.; Kato, N.; Yamaguchi, Y.; Dewantara, R.; Chiba, H.; Senga, H.; Yoshie, M.; Tanaka, T.; Kobayashi, E.; Short, T. Development and Operation of Underwater Robot for Autonomous Tracking and Monitoring of Subsea Plumes After Oil Spill and Gas Leak from Seabed and Analyses of Measured Data. In Applications to Marine Disaster Prevention: Spilled Oil and Gas Tracking Buoy System; Springer: Tokyo, Japan, 2017; pp. 17–93. [Google Scholar] [CrossRef]
- Leifer, I.; Lehr, W.J.; Simecek-Beatty, D.; Bradley, E.; Clark, R.; Dennison, P.; Hu, Y.; Matheson, S.; Jones, C.E.; Holt, B.; et al. State of the art satellite and airborne marine oil spill remote sensing: Application to the BP Deepwater Horizon oil spill. Remote Sens. Environ. 2012, 124, 185–209. [Google Scholar] [CrossRef]
- Hurford, N. The use of a satellite-tracked buoy to monitor the movement of an oil slick at sea. Oil Chem. Pollut. 1990, 6, 101–112. [Google Scholar] [CrossRef]
- Klemas, V. Tracking Oil Slicks and Predicting their Trajectories Using Remote Sensors and Models: Case Studies of the Sea Princess and Deepwater Horizon Oil Spills. J. Coast. Res. 2010, 26, 789–797. [Google Scholar] [CrossRef]
- Rathour, S.S.; Kato, N.; Senga, H.; Tanabe, T.; Yoshie, M.; Tanaka, T. Development of a Robotic Floating Buoy for Autonomously Tracking Oil Slicks Drifting on the Sea Surface (SOTAB-II): Experimental Results. In Applications to Marine Disaster Prevention: Spilled Oil and Gas Tracking Buoy System; Springer: Tokyo, Japan, 2017; pp. 95–127. [Google Scholar] [CrossRef]
- Ventikos, N.P.; Vergetis, E.; Psaraftis, H.N.; Triantafyllou, G. A high-level synthesis of oil spill response equipment and countermeasures. J. Hazard. Mater. 2004, 107, 51–58. [Google Scholar] [CrossRef] [PubMed]
- Giron-Sierra, J.M.; Gheorghita, A.T.; Angulo, G.; Jimenez, J.F. Towing a boom with two USVs for oil spill recovery: Scaled experimental development. In Proceedings of the 2014 13th International Conference on Control Automation Robotics Vision (ICARCV), Singapore, 10–12 December 2014; pp. 1729–1734. [Google Scholar] [CrossRef]
- Li, S.; Guo, Y.; Bingham, B. Multi-robot cooperative control for monitoring and tracking dynamic plumes. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 67–73. [Google Scholar] [CrossRef]
- Hallegraeff, G.M. A review of harmful algal blooms and their apparent global increase. Phycologia 1993, 32, 79–99. [Google Scholar] [CrossRef]
- Hoagland, P.; Scatasta, S. The Economic Effects of Harmful Algal Blooms. In Ecology of Harmful Algae; Springer: Berlin/Heidelberg, Germany, 2006; pp. 391–402. [Google Scholar] [CrossRef]
- Dolah, F.M.V. Marine algal toxins: Origins, health effects, and their increased occurrence. Environ. Health Perspect. 2000, 108, 133–141. [Google Scholar] [CrossRef]
- Sivonen, K.; Jones, G. Toxic Cyanobacteria in Water: A Guide to Their Public Health Consequences, Monitoring and Management; E & FN Spon: London, UK, 1999; pp. 41–111. [Google Scholar]
- Higinbotham, J.R.; Hitchener, P.G.; Moisan, J.R. Development of a New Long Duration Solar Powered Autonomous Surface Vehicle. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Higinbotham, J.R.; Moisan, J.R.; Schirtzinger, C.; Linkswiler, M.; Yungel, J.; Orton, P. Update on the development and testing of a new long duration solar powered autonomous surface vehicle. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–10. [Google Scholar] [CrossRef]
- Dolan, J.M.; Podnar, G.; Stancliff, S.; Lin, E.; Hosler, J.; Ames, T.; Moisan, J.; Moisan, T.; Higinbotham, J.; Elfes, A. Harmful Algal Bloom Characterization Via the Telesupervised Adaptive Ocean Sensor Fleet. Robotics Commons. 2007. Available online: https://www.ri.cmu.edu/publications/harmful-algal-bloom-characterization-via-the-telesupervised-adaptive-ocean-sensor-fleet/ (accessed on 20 November 2018).
- Dolan, J.M.; Podnar, G.W.; Stancliff, S.; Low, K.H.; Elfes, A.; Higinbotham, J.; Hosler, J.; Moisan, T.; Moisan, J. Cooperative aquatic sensing using the telesupervised adaptive ocean sensor fleet. Proc. SPIE 2009, 7473, 747307. [Google Scholar] [CrossRef]
- de Menezes Pereira, A.A. Navigation and Guidance of an Autonomous Surface Vehicle. Ph.D. Thesis, University of Southern California, Los Angeles, CA, USA, 2007. [Google Scholar]
- Elfes, A.; Podnar, G.W.; Dolan, J.M.; Stancliff, S.; Lin, E.; Hosler, J.C.; Ames, T.J.; Higinbotham, J.; Moisan, J.R.; Moisan, T.A.; et al. The Telesupervised Adaptive Ocean Sensor Fleet Architecture. In Proceedings of the 2008 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008; pp. 1–9. [Google Scholar] [CrossRef]
- Low, K.H.; Podnar, G.; Stancliff, S.B.; Dolan, J.M.; Elfes, A. Robot Boats as a Mobile Aquatic Sensor Network. In Proceedings of the 2009 International Conference on Information Processing in Sensor Networks (IPSN) Workshop on Sensor Networks for Earth and Space Science Applications: ESSA 2009, San Francisco, CA, USA, 13–16 April 2009. [Google Scholar]
- Dunbabin, M.; Udy, J.; Grinham, A.; Bruenig, M. Continuous monitoring of reservoir water quality: The Wivenhoe Project. Water 2009, 36, 74–77. [Google Scholar]
- Dunbabin, M.; Grinham, A.; Udy, J. An autonomous surface vehicle for water quality monitoring. In Proceedings of the Australasian Conference on Robotics and Automation (ACRA), Sydney, Australia, 2–4 December 2009; pp. 2–4. [Google Scholar]
- Dunbabin, M.; Grinham, A. Experimental evaluation of an autonomous surface vehicle for water quality and greenhouse gas emission monitoring. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010; pp. 5268–5274. [Google Scholar]
- Dunbabin, M.; Corke, P. A framework for marine sensor network and autonomous vehicle interaction. In Proceedings of the OCEANS’10 IEEE, Sydney, Australia, 24–27 May 2010; pp. 1–7. [Google Scholar] [CrossRef]
- Hitz, G.; Pomerleau, F.; Garneau, M.E.; Pradalier, C.; Posch, T.; Pernthaler, J.; Siegwart, R. Design and application of a surface vessel for autonomous inland water monitoring. IEEE Robot. Autom. Mag. 2012, 19, 1–9. [Google Scholar] [CrossRef]
- Hitz, G.; Pomerleau, F.; Garneau, M.E.; Pradalier, C.; Posch, T.; Pernthaler, J.; Siegwart, R.Y. Autonomous Inland Water Monitoring: Design and Application of a Surface Vessel. IEEE Robot. Autom. Mag. 2012, 19, 62–72. [Google Scholar] [CrossRef]
- Seo, S.M.; Chung, W.K.; Cho, E.S. Real time detecting of harmful dinoflagellate Cochlodinium polykrikoides using unmanned surface vehicle in dynamic environments. J. Environ. Biol. 2014, 35, 563. [Google Scholar] [PubMed]
- Lopez, M.A.; Gutiérrez, D.; Gregor, D.; Toral, S.L. A Path Planning Approach of an Autonomous Surface Vehicle for Water Quality Monitoring using Evolutionary Computation. In Technology for Smart Futures; Springer International Publishing AG: Cham, Switzerland, 2017. [Google Scholar] [CrossRef]
- Zhang, F.; Ennasr, O.; Litchman, E.; Tan, X. Autonomous Sampling of Water Columns Using Gliding Robotic Fish: Algorithms and Harmful-Algae-Sampling Experiments. IEEE Syst. J. 2016, 10, 1271–1281. [Google Scholar] [CrossRef]
- Ziccarelli, L.; Dellor, R.; Johnson, R.; Schmitz, H.; O’Reilly, T.; Chavez, F. A novel method of obtaining near real-time observations of phytoplankton from a mobile autonomous platform. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- WHO. Health Risk Assessment From the Nuclear Accident after the 2011 Great East Japan Earthquake and Tsunami, Based on a Preliminary Dose Estimation; World Health Organization: Geneva, Switzerland, 2013; p. 172. [Google Scholar]
- Matthew, D.; Michael, P.; Buder, S. A Systems-Of-Systems Conceptual Model and Live Virtual Constructive Simulation Framework for Improved Nuclear Disaster Emergency Preparedness, Response, and Mitigation. J. Homel. Secur. Emerg. Manag. 2016, 13, 367–393. [Google Scholar] [CrossRef]
- Davis, M.T.; Proctor, M.D.; Shageer, B. Disaster factor screening using SoS conceptual modeling and an {LVC} simulation framework. Reliab. Eng. Syst. Saf. 2017, 165, 368–375. [Google Scholar] [CrossRef]
- Shrewsbury, B.; Henkel, Z.; Kim, C.Y.; Murphy, R.R. RESPOND-R test instrument. In Proceedings of the 2013 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Linkoping, Sweden, 21–26 October 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Bordetsky, A.; Dougan, A.; Chiann, F.Y.; Kilberg, A. TNT Maritime Interdiction Operation Experiments: Enabling Radiation Awareness and Geographically Distributed Collaboration for Network-Centric Maritime Interdiction Operations. In Proceedings of the 12th International Command and Control Research and Technology Symposium (ICCRTS), Naval War College, Newport, RI, USA, 19–21 June 2007. [Google Scholar]
- Wilde, G.A.; Murphy, R.R.; Shell, D.A.; Marianno, C.M. A man-packable unmanned surface vehicle for radiation localization and forensics. In Proceedings of the 2015 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), West Lafayette, IN, USA, 18–20 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Wilde, G.A. Path Plan Performance Evaluation of the Challenge 1: A Small Unmanned Surface Vehicle for Radiation Detection and Mapping. Master’s Thesis, Texas A & M University, College Station, TX, USA, 2016. [Google Scholar]
- Matos, A.; Martins, A.; Dias, A.; Ferreira, B.; Almeida, J.M.; Ferreira, H.; Amaral, G.; Figueiredo, A.; Almeida, R.; Silva, F. Multiple robot operations for maritime search and rescue in euRathlon 2015 competition. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Miranda, M.; Beaujean, P.P.; An, E.; Dhanak, M. Homing an unmanned underwater vehicle equipped with a DUSBL to an unmanned surface platform: A feasibility study. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 23–27 September 2013; pp. 1–10. [Google Scholar] [CrossRef]
- Lubofsky, E. Back to BIKINI. Oceanus 2017, 52, 32–39. [Google Scholar]
- DeVault, J.E. Robotic system for underwater inspection of bridge piers. IEEE Instrum. Meas. Mag. 2000, 3, 32–37. [Google Scholar] [CrossRef]
- Lagasse, P.; Clopper, P.; Pagan-Ortiz, J.; Zevenbergen, L.; Arneson, L.; Schall, J.; Girard, L. Bridge Scour and Stream Instability Countermeasures: Experience, Selection, and Design Guidance: Volume 1; Technical Report FHWA-NHI-09-111, HEC 23; US Department of Transportation, National Highway Administration: Washington, DC, USA, 2009.
- Mueller, D.S.; Landers, M.N. Portable Instrumentation for Real-Time Measurement of Scour at Bridges; Technical Report; U.S. Department of Transportation, Federal Highway Administration, U.S. Department of the Interior: Washington, DC, USA, 2000.
- Kurniawati, H.; Schulmeister, J.C.; Bandyopadhyay, T.; Papadopoulos, G.; Hover, F.S.; Patrikalakis, N.M. Infrastructure for 3D model reconstruction of marine structures. In Proceedings of the International Offshore and Polar Engineering Conference, Maui, HI, USA, 19–24 June 2011. [Google Scholar]
- Leedekerken, J.C. Mapping of Complex Marine Environments Using an Unmanned Surface Craft. Ph.D. Thesis, Department of Electrical Engineering and Computer Science, Massachusetts Institute of Technology, Cambridge, MA, USA, 2011. [Google Scholar]
- Papadopoulos, G.; Kurniawati, H.; Bin Mohd Shariff, A.S.; Wong, L.J.; Patrikalakis, N.M. 3D-surface reconstruction for partially submerged marine structures using an autonomous surface vehicle. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 3551–3557. [Google Scholar] [CrossRef]
- Papadopoulos, G.; Kurniawati, H.; Bin Mohd Shariff, A.S.; Wong, L.J.; Patrikalakis, N. Experiments on Surface Reconstruction for Partially Submerged Marine Structures. J. Field Robot. 2014, 31. [Google Scholar] [CrossRef]
- Han, J.; Park, J.; Kim, J. Three-dimensional reconstruction of bridge structures above the waterline with an unmanned surface vehicle. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2273–2278. [Google Scholar] [CrossRef]
- Han, J.; Park, J.; Kim, T.; Kim, J. Precision navigation and mapping under bridges with an unmanned surface vehicle. Auton. Robots 2015, 38, 349–362. [Google Scholar] [CrossRef]
- Han, J.; Kang, M.; Wang, J.; Kim, J. Three-dimensional reconstruction of a semi-submersible offshore platform with an unmanned surface vehicle. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Shojaei, A.; Moud, H.I.; Razkenari, M.; Flood, I. Feasibility Study of Small Unmanned Surface Vehicle Use in Built Environment Assessment. In Proceedings of the 2018 IISE Annual Conference, Orlando, FL, USA, 19–22 May 2018. [Google Scholar]
- Shojaei, A.; Moud, H.I.; Flood, I. Proof of Concept for the Use of Small Unmanned Surface Vehicle in Built Environment Management. In Proceedings of the Construction Research Congress 2018, New Orleans, LA, USA, 2–4 April 2018; pp. 148–157. [Google Scholar] [CrossRef]
- Forooshani, P.M.; Jenkin, M. Sensor coverage with a heterogeneous fleet of autonomous surface vessels. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 571–576. [Google Scholar] [CrossRef]
- Majohr, J.; Buch, T. Modelling, simulation and control of an autonomous surface marine vehicle for surveying applications Measuring Dolphin MESSIN. IEE Control Eng. Ser. 2006, 69, 329. [Google Scholar]
- Prasad, D.K.; Rajan, D.; Rachmawati, L.; Rajabally, E.; Quek, C. Video Processing From Electro-Optical Sensors for Object Detection and Tracking in a Maritime Environment: A Survey. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1993–2016. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef]
- Wang, J.; Gu, W.; Zhu, J.; Zhang, J. An Unmanned Surface Vehicle for Multi-mission Applications. In Proceedings of the 2009 International Conference on Electronic Computer Technology, Macau, China, 20–22 February 2009; pp. 358–361. [Google Scholar] [CrossRef]
- Govindhan, P.; Kuruvilla, R.B.; Shanmugasundar, D.; Thangapandi, M.; Venkateswaran, G. Human Detecting Aqua Robot using PIR Sensors. Int. J. Eng. Sci. 2017, 7, 6549–6553. [Google Scholar]
- Lee, S.; Kim, D.; Tokuta, A.O. Development of advanced sonar sensor model for underwater terrain mapping based on occupancy grids. Int. J. Appl. Eng. Res. 2015, 10, 38045–38050. [Google Scholar]
- Lee, E.h.; Lee, S. Development of Underwater Terrain Map Building Method on Polar Coordinates by Using 3D Sonar Point Clouds. Int. J. Appl. Eng. Res. 2016, 11, 8259–8264. [Google Scholar]
- Lee, S. Deep learning of submerged body images from 2D sonar sensor based on convolutional neural network. In Proceedings of the 2017 IEEE Underwater Technology (UT), Busan, South Korea, 21–24 February 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Kurowski, M.; Korte, H.; Lampe, B.P. AGaPaS—A new approach for Search-and-Rescue-Operations at sea. IFAC Proc. Vol. 2012, 45, 73–78. [Google Scholar] [CrossRef]
- Clauss, G.F.; Kauffeldt, A.; Otten, N.; Stuppe, S. Hull Optimization of the Unmanned AGaPaS Rescue Vessel. In Proceedings of the 29th International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, 6–11 June 2010; pp. 245–254. [Google Scholar] [CrossRef]
- Clauss, G.F.; Kauffeldt, A.; Otten, N.; Stuppe, S. Identification of Favourable Free Fall Parameters for the AGaPaS Rescue Catamaran. In Proceedings of the ASME 2011 30th International Conference on Ocean, Offshore and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; Volume 6, pp. 849–857. [Google Scholar] [CrossRef]
- Wilde, G.A.; Murphy, R.R. User Interface for Unmanned Surface Vehicles Used to Rescue Drowning Victims. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Schofield, R.T.; Wilde, G.A.; Murphy, R.R. Potential Field Implementation for Move-to-Victim Behavior for a Lifeguard Assistant Unmanned Surface Vehicle. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–2. [Google Scholar] [CrossRef]
- Govindaraj, S.; Chintamani, K.; Gancet, J.; Letier, P.; van Lierde, B.; Nevatia, Y.; Cubber, G.D.; Serrano, D.; Palomares, M.E.; Bedkowski, J.; et al. The ICARUS project—Command, Control and Intelligence (C2I). In Proceedings of the 2013 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Linkoping, Sweden, 21–26 October 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Cubber, G.D.; Doroftei, D.; Serrano, D.; Chintamani, K.; Sabino, R.; Ourevitch, S. The EU-ICARUS project: Developing assistive robotic tools for search and rescue operations. In Proceedings of the 2013 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Linkoping, Sweden, 21–26 October 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Cubber, G.D.; Doroftei, D.; Balta, H.; Matos, A.; Silva, E.; Serrano, D.; Govindaraj, S.; Roda, R.; Lobo, V.; Marques, M.; et al. Operational Validation of Search and Rescue Robots. In Search and Rescue Robotics; IntechOpen: London, UK, 2017. [Google Scholar] [CrossRef]
- Matos, A.; Silva, E.; Cruz, N.; Alves, J.C.; Almeida, D.; Pinto, M.; Martins, A.; Almeida, J.; Machado, D. Development of an Unmanned Capsule for large-scale maritime search and rescue. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 23–27 September 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Machado, D.; Martins, A.; Almeida, J.M.; Ferreira, H.; Amaral, G.; Ferreira, B.; Matos, A.; Silva, E. Water jet based autonomous surface vehicle for coastal waters operations. In Proceedings of the 2014 Oceans, St. John’s, LA, Canada, 14–19 September 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Ferreira, B.M.; Matos, A.C.; Alves, J.C. Water-jet propelled autonomous surface vehicle UCAP: System description and control. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Matos, A.; Silva, E.; Almeida, J.; Martins, A.; Ferreira, H.; Ferreira, B.; Alves, J.; Dias, A.; Fioravanti, S.; Bertin, D.; et al. Unmanned Maritime Systems for Search and Rescue. In Search and Rescue Robotics; IntechOpen: London, UK, 2017; pp. 77–92. [Google Scholar] [CrossRef]
- Marques, M.M.; Martins, A.; Matos, A.; Cruz, N.; Almeida, J.M.; Alves, J.C.; Lobo, V.; Silva, E. REX 2014—Robotic Exercises 2014 multi-robot field trials. In Proceedings of the OCEANS 2015-MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Martins, A.; Dias, A.; Almeida, J.; Ferreira, H.; Almeida, C.; Amaral, G.; Machado, D.; Sousa, J.; Pereira, P.; Matos, A.; et al. Field experiments for marine casualty detection with autonomous surface vehicles. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 23–27 September 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Cruz, N.; Matos, A.; Cunha, S.; da Silva, S.O. Zarco—An autonomous craft for underwater surveys. 7th Geomatic Week, Barcelona, Spain, 20–23 February 2007. Available online: https://sigarra.up.pt/fcnaup/en/pub_geral.pub_view?pi_pub_base_id=60724 (accessed on 5 December 2018).
- Sumimoto, T.; Kuramoto, K.; Okada, S.; Miyauchi, H.; Imade, M.; Yamamoto, H.; Kunishi, T. Machine vision for detection of the rescue target in the marine casualty. In Proceedings of the IECON’94—20th Annual Conference of IEEE Industrial Electronics, Bologna, Italy, 5–9 September 1994; Volume 2, pp. 723–726. [Google Scholar] [CrossRef]
- Wang, B.; Xu, W.; Zhao, M.; Wu, H. Antivibration pipeline-filtering algorithm for maritime small target detection. Opt. Eng. 2014, 53, 113109. [Google Scholar] [CrossRef]
- Fan, Y.; Ma, J.; Wang, G.; Li, T. Design of a heterogeneous marsupial robotic system composed of an USV and an UAV. In Proceedings of the 2016 Eighth International Conference on Advanced Computational Intelligence (ICACI), Chiang Mai, Thailand, 14–16 February 2016; pp. 395–399. [Google Scholar] [CrossRef]
- Ramírez, F.F.; Benitez, D.S.; Portas, E.B.; Orozco, J.A.L. Coordinated sea rescue system based on unmanned air vehicles and surface vessels. In Proceedings of the OCEANS 2011 IEEE, Santander, Spain, 6–9 June 2011; pp. 1–10. [Google Scholar] [CrossRef]
- Tao, T.; Jia, R. UAV decision-making for maritime rescue based on Bayesian Network. In Proceedings of the 2012 2nd International Conference on Computer Science and Network Technology, Changchun, China, 29–31 December 2012; pp. 2068–2071. [Google Scholar] [CrossRef]
- Rafferty, K.J.; McGookin, E.W. An autonomous air-sea rescue system using Particle Swarm Optimization. In Proceedings of the 2013 International Conference on Connected Vehicles and Expo (ICCVE), Las Vegas, NV, USA, 2–6 December 2013; pp. 459–464. [Google Scholar] [CrossRef]
- Murphy, R.; Dufek, J.; Sarmiento, T.; Wilde, G.; Xiao, X.; Braun, J.; Mullen, L.; Smith, R.; Allred, S.; Adams, J.; et al. Two case studies and gaps analysis of flood assessment for emergency management with small unmanned aerial systems. In Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 54–61. [Google Scholar] [CrossRef]
- Dufek, J.; Murphy, R. Visual pose estimation of USV from UAV to assist drowning victims recovery. In Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 147–153. [Google Scholar] [CrossRef]
- Dufek, J.; Xiao, X.; Murphy, R. Visual pose stabilization of tethered small unmanned aerial system to assist drowning victim recovery. In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017; pp. 116–122. [Google Scholar] [CrossRef]
- Xiao, X.; Dufek, J.; Woodbury, T.; Murphy, R. UAV assisted USV visual navigation for marine mass casualty incident response. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6105–6110. [Google Scholar] [CrossRef]
- Krishna, C.G.L.; Cao, M.; Murphy, R.R. Autonomous observation of multiple USVs from UAV while prioritizing camera tilt and yaw over UAV motion. In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017; pp. 141–146. [Google Scholar] [CrossRef]
- Dufek, J.; Murphy, R. Theoretical Limitations of Visual Navigation of Lifesaving USV using Small UAS. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Mendonça, R.; Marques, M.M.; Marques, F.; Lourenço, A.; Pinto, E.; Santana, P.; Coito, F.; Lobo, V.; Barata, J. A cooperative multi-robot team for the surveillance of shipwreck survivors at sea. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Abreu, P.C.; Botelho, J.; Góis, P.; Pascoal, A.; Ribeiro, J.; Ribeiro, M.; Rufino, M.; Sebastiao, L.S.; Silva, H. The MEDUSA class of autonomous marine vehicles and their role in EU projects. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–10. [Google Scholar] [CrossRef]
- Abreu, P.; Bayat, M.; Botelho, J.; Góis, P.; Pascoal, A.; Ribeiro, J.; Ribeiro, M.; Rufino, M.; Sebastiao, L.S.; Silva, H. Cooperative control and navigation in the scope of the EC CADDY project. In Proceedings of the OCEANS 2015, Genova, Italy, 18–21 May 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Goodfellow, G.M.; Neasham, J.A.; Rendulić, I.; Nađ, Đ.; Mišković, N. DiverNet—A network of inertial sensors for real time diver visualization. In Proceedings of the 2015 IEEE Sensors Applications Symposium (SAS), Zadar, Croatia, 13–15 April 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Chavez, A.G.; Mueller, C.A.; Birk, A.; Babic, A.; Mišković, N. Stereo-vision based diver pose estimation using LSTM recurrent neural networks for AUV navigation guidance. In Proceedings of the OCEANS 2017, Aberdeen, UK, 19–22 June 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Mišković, N.N.; Nađ, D.; Rendulic, I. Tracking Divers: An Autonomous Marine Surface Vehicle to Increase Diver Safety. IEEE Robot. Autom. Mag. 2015, 22, 72–84. [Google Scholar] [CrossRef]
- Mišković, N.; Pascoal, A.; Bibuli, M.; Caccia, M.; Neasham, J.A.; Birk, A.; Egi, M.; Grammer, K.; Marroni, A.; Vasilijevič, A.; et al. CADDY Project, Year 2: The First Validation Trials. IFAC-PapersOnLine 2016, 49, 420–425. [Google Scholar] [CrossRef]
- Mišković, N.; Pascoal, A.; Bibuli, M.; Caccia, M.; Neasham, J.A.; Birk, A.; Egi, M.; Grammer, K.; Marroni, A.; Vasilijević, A.; et al. CADDY project, year 3: The final validation trials. In Proceedings of the OCEANS 2017, Aberdeen, UK, 19–22 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Moura, D.; Guardalben, L.; Luis, M.; Sargento, S. A Drone-Quality Delay Tolerant Routing Approach for Aquatic Drones Scenarios. In Proceedings of the 2017 IEEE Globecom Workshops (GC Wkshps), Singapore, 4–8 December 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Ferreira, H.; Silva, F.; Sousa, P.; Matias, B.; Faria, A.; Oliveira, J.; Almeida, J.M.; Martins, A.; Silva, E. Autonomous systems in remote areas of the ocean using BLUECOM+ communication network. In Proceedings of the OCEANS 2017, Anchorage, AK, USA, 18–21 September 2017; pp. 1–6. [Google Scholar]
- Zolich, A.; Palma, D.; Kansanen, K.; Fjørtoft, K.; Sousa, J.; Johansson, K.H.; Jiang, Y.; Dong, H.; Johansen, T.A. Survey on Communication and Networks for Autonomous Marine Systems. J. Intell. Robot. Syst. 2018. [Google Scholar] [CrossRef]
- Burke, J.L.; Murphy, R.R.; Coovert, M.D.; Riddle, D.L. Moonlight in Miami: Field Study of Human-Robot Interaction in the Context of an Urban Search and Rescue Disaster Response Training Exercise. Hum. Comput. Interact. 2004, 19, 85–116. [Google Scholar] [CrossRef]
- Stepanova, E.R.; von der Heyde, M.; Kitson, A.; Schiphorst, T.; Riecke, B.E. Gathering and Applying Guidelines for Mobile Robot Design for Urban Search and Rescue Application. In Proceedings of the 19th International Conference on HCI, Vancouver, BC, Canada, 9–14 July 2017; pp. 562–581. [Google Scholar] [CrossRef]
- Kitts, C.A.; Egerstedt, M. Design, Control, and Applications of Real-World Multirobot Systems [From the Guest Editors]. IEEE Robot. Autom. Mag. 2008, 15, 8. [Google Scholar] [CrossRef]
- Mas, I.; Kitts, C.A. Dynamic Control of Mobile Multirobot Systems: The Cluster Space Formulation. IEEE Access 2014, 2, 558–570. [Google Scholar] [CrossRef]
- Latha, R.; Vijayalakshmi, K. Autonomous Surface Vessels Navigation Using Cluster Space Control Technique in Multi-Robot System. Available online: http://www.warse.org/ijatcse/static/pdf/file/ijatcse01422015.pdf (accessed on 5 February 2019).
- Murphy, R.; Steimle, E.; Lindemuth, M.; Trejo, D.; Hall, M.; Slocum, D.; Hurlebaus, S.; Medina-Cetina, Z. Use of unmanned marine vehicles for hurricane damage inspection. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009; Volume 2, pp. 783–790. [Google Scholar]
- Bruzzone, G.; Bibuli, M.; Caccia, M.; Zereik, E. Cooperative robotic maneuvers for emergency ship towing operations. In Proceedings of the 2013 MTS/IEEE OCEANS, Bergen, Norway, 10–13 June 2013; pp. 1–7. [Google Scholar] [CrossRef]
- Bruzzone, G.; Bibuli, M.; Zereik, E.; Ranieri, A.; Caccia, M. Cooperative adaptive guidance and control paradigm for marine robots in an emergency ship towing scenario. Int. J. Adapt. Control Signal Process. 2017, 31, 562–580. [Google Scholar] [CrossRef]
- Ardito, S.; Lazarevs, D.; Vasiliniuc, B.; Vukic, Z.; Masabayashi, K.; Caccia, M. Cooperative Autonomous Robotic Towing system: Definition of requirements and operating scenarios. IFAC Proc. Vol. 2012, 45, 262–267. [Google Scholar] [CrossRef]
- Klemens, K.W. Development and Evaluation of a USV Based Mapping System for Remote Sensing of Eelgrass Extent in Southern California. Master’s Thesis, University of Southern California, Los Angeles, CA, USA, 2017. [Google Scholar]
- Cruz, N.A.; Alves, J.C. Autonomous sailboats: An emerging technology for ocean sampling and surveillance. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Camilli, L. Designing Ocean Drones for Maritime Security: The use of integrated sensing modalities to enhance situational awareness. In Proceedings of the Marine Technology Society and IEEE Oceanic Engineering Society OCEANS 2015 Environmental Intelligence, Washington, DC, USA, 19–22 October 2015. [Google Scholar]
- Schneider, F.E.; Wildermuth, D. Assessing the search and rescue domain as an applied and realistic benchmark for robotic systems. In Proceedings of the 2016 17th International Carpathian Control Conference (ICCC), High Tatras, Slovakia, 29 May–1 June 2016; pp. 657–662. [Google Scholar] [CrossRef]
- Ferri, G.; Ferreira, F.; Djapic, V. Boosting the talent of new generations of marine engineers through robotics competitions in realistic environments: The SAUC-E and euRathlon experience. In Proceedings of the OCEANS 2015, Genova, Italy, 18–21 May 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Ferri, G.; Ferreira, F.; Djapic, V. Multi-domain robotics competitions: The CMRE experience from SAUC-E to the European Robotics League Emergency Robots. In Proceedings of the OCEANS 2017, Aberdeen, UK, 9–22 June 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Boas, J.M.V.; Júnior, A.G.S.; Santos, D.H.; Negreiros, A.P.F.; Alvarez-Jácobo, J.E.; Gonçalves, L.M.G. Towards the Electromechanical Design of an Autonomous Robotic Sailboat. In Proceedings of the 2016 XIII Latin American Robotics Symposium and IV Brazilian Robotics Symposium (LARS/SBR), Recife, PE, Brazil, 8–12 February 2016; pp. 43–48. [Google Scholar] [CrossRef]
- Júnior, A.G.S.; Araújo, A.P.D.; Silva, M.V.A.; Aroca, R.V.; Gonçalves, L.M.G. N-BOAT: An Autonomous Robotic Sailboat. In Proceedings of the 2013 Latin American Robotics Symposium and Competition, Arequipa, Peru, 21–27 October 2013; pp. 24–29. [Google Scholar] [CrossRef]
- Santos, D.; Silva Junior, A.G.; Negreiros, A.; Vilas Boas, J.a.; Alvarez, J.; Araújo, A.; Aroca, R.V.; Gonçalves, L.M.G. Design and Implementation of a Control System for a Sailboat Robot. Robotics 2016, 5. [Google Scholar] [CrossRef]
- da Silva Junior, A.G.; de Lima Sá, S.T.; dos Santos, D.H.; de Negreiros, A.P.F.; de Souza Silva, J.a.M.V.B.; Álvarez Jácobo, J.E.; Gonçalves, L.M.G. Towards a Real-Time Embedded System for Water Monitoring Installed in a Robotic Sailboat. Sensors 2016, 16. [Google Scholar] [CrossRef]
- Paravisi, M.; Jorge, V.A.M.; Amory, A.M. Toward an Accurate Hydrologic Urban Flooding Simulations for Disaster Robotics. In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics, ICINCO 2018—Volume 2, Porto, Portugal, 29–31 July 2018; pp. 435–441. [Google Scholar]
- Qi, C.R.; Liu, W.; Wu, C.; Su, H.; Guibas, L.J. Frustum PointNets for 3D Object Detection From RGB-D Data. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 19–21 June 2018. [Google Scholar]
- Xu, B.; Chen, Z. Multi-Level Fusion Based 3D Object Detection From Monocular Images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 19–21 June 2018. [Google Scholar]
- Chen, H.; Li, Y. Progressively Complementarity-Aware Fusion Network for RGB-D Salient Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 19–21 June 2018. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
| USV Related Terms | Disaster-Related Terms |
|---|---|
| unmanned vessel, unmanned boat, autonomous vessel, autonomous boat, autonomous craft, unmanned craft, Unmanned Surface Vehicles (USVs), Autonomous Surface Vehicles (ASVs), Unmanned Marine Vehicles (UMVs), Unmanned Surface Crafts (USCs), Autonomous Surface Crafts (ASCs), Unmanned Surface Vessel, Autonomous Surface Vessel, Underactuated surface vessel, micro unmanned surface vessels | Disaster Prevention, Disaster Recovery, Disaster Relief, disaster response, emergency response, disaster prevention, disaster, inspection, reconnaissance & mapping, monitoring, surveillance, Search And Rescue (SAR), hurricane, tsunami, earthquake, floods, extreme event, emergency response |
| Task | Reference | Year | USV Name | USV Type | Test Location |
|---|---|---|---|---|---|
| T. & E. | [53,54] | 2012 | NR | Buoy | Tonakai segment, Nankai Trough, Japan |
| [55] | 2013 | NR | Monohull vessel | Japan Trench | |
| [56] | 2015 | MERMAID | Argo floats | Mediterranean Sea | |
| [57,58] | 2016 | NR | Wave Glider | NR | |
| [59] | 2014 | NR | Wave Glider | Gulf of Mexico and US eastern seaboard | |
| [60] | 2016 | SV2 | Wave Glider | Loch Ness, Scotland | |
| Hurricanes | [61] | 2008 | AEOS-1 | Twin-hull catamaran | Marco Island, USA |
| [62,63,64] | 2009 | Sea-RAI | Twin-hull catamaran | Galveston, Texas, USA | |
| [65,66] | 2012 | EMILY | Monohull vessel | Simulator | |
| [67] | 2014 | Benjamin | Wave Glider | New Caledonia | |
| [68] | 2015 | SV2 | Wave Glider | Caribbean Sea | |
| [69] | 2016 | NR | Wave Glider | Okinawa, Japan | |
| Floods | [70,71] | 2012 | NR | Airboat | Philippines and New York, USA |
| [8,72] | 2015 | NR | Monohull vessel | Province of Ancona, Italy | |
| [73,74] | 2016 | NR | Monohull vessel | NR | |
| [75] | 2018 | NR | Monohull vessel | Port Fourchon, Louisiana, USA | |
| L. & E. | [76] | 2009 | ROAZ II | Twin-hull catamaran | Portuguese Tua River |
| [77] | 2008 | ROAZ II | Twin-hull catamaran | Douro estuary sand spit and | |
| Vila Nova de Gaia coast, Portugal |
| Task | Reference | Year | USV Name | USV Type | Test Location |
|---|---|---|---|---|---|
| Detection | [102,103] | 2011 | HydroNet | Twin-hull catamaran | Livorno, Italy |
| [104] | 2012 | ASV-Victoria | Twin-hull catamaran | Louisiana, USA | |
| [105] | 2016 | NR | NR | NR | |
| [106] | 2017 | HydroNet | Twin-hull catamaran | Livorno, Italy | |
| Monitoring | [94] | 2013 | NR | Wave glider | Gulf of Mexico |
| [107] | 2015 | NR | Buoy | Biograd na Moru, Croatia | |
| [101] | 2016 | BUSCAMOS-Oil | Monohull vessel | Cartagena, Spain | |
| [108] | 2016 | C-Enduro/C-Worker | Twin-hull/Monohull | Gulf of Mexico | |
| [93] | 2017 | PlaDyPos | Buoy | Cartagena, Spain | |
| Tracking | [109,110] | 2012 | SOTAB-II | Buoys | NR |
| [111,112] | 2012 | SOTAB-II | Buoys | Osaka Bay, Japan | |
| [113,114] | 2015 | SOTAB-II | Yacht-shaped | Kobe, Japan | |
| [115] | 2015 | NR | Twin-hull catamaran | Simulator | |
| [116] | 2017 | NR | Monohull vessel | Simulator | |
| [117] | 2017 | NR | Twin-hull catamaran | Oahu, Hawaii | |
| Caging | [118,119] | 2010 | USC RESL | Monohull vessel | Los Angeles, USA |
| [120] | 2011 | USC RESL | Monohull vessel | Los Angeles, USA | |
| [121] | 2011 | NR | Monohull vessel | NR | |
| [95] | 2012 | NR | Containment boom | NR | |
| Removing | [122] | 2007 | EU-MOP | Monocat and catamaran | NR |
| [123] | 2008 | EU-MOP | Monocat and catamaran | NR | |
| [124,125] | 2015 | NR | Scaled Zodiac | Madrid, Spain | |
| [126] | 2015 | PUS | Monohull vessel | NR | |
| [127] | 2016 | HaiTeng 01 | Monohull vessel | Shenzhen Bay, China |
| Reference | Year | USV Name | USV Type | Test Location |
|---|---|---|---|---|
| [146,147] | 2006 | OASIS | Platform | Chincoteague Bay, USA |
| [148,149] | 2007 | OASIS | Platform | Chesapeake Bay, USA |
| [150] | 2007 | Roboduck-II | Monohull vessel | Redondo Beach, USA |
| [151] | 2008 | MARTA/OASIS | Platform | Chesapeake Bay, USA |
| [152] | 2009 | MARTA/OASIS/RSB | Platform/Kayak | Chesapeake Bay, USA |
| [153,154,155,156] | 2009 | Lake Wivenhoe ASV | Twin-hull catamaran | Lake Wivenhoe, Australia |
| [157,158] | 2012 | Lizhbeth | Twin-hull catamaran | Lake Zürich |
| [159] | 2014 | NR | Twin-hull catamaran | Simulation |
| [160] | 2017 | NR | NR | Ypacarai Lake, Paraguay (simulation) |
| [161] | 2016 | Grace | Gliding robotic fish | Wintergreen Lake, Michigan |
| [162] | 2016 | Wave glider | Solar wave glider | NR |
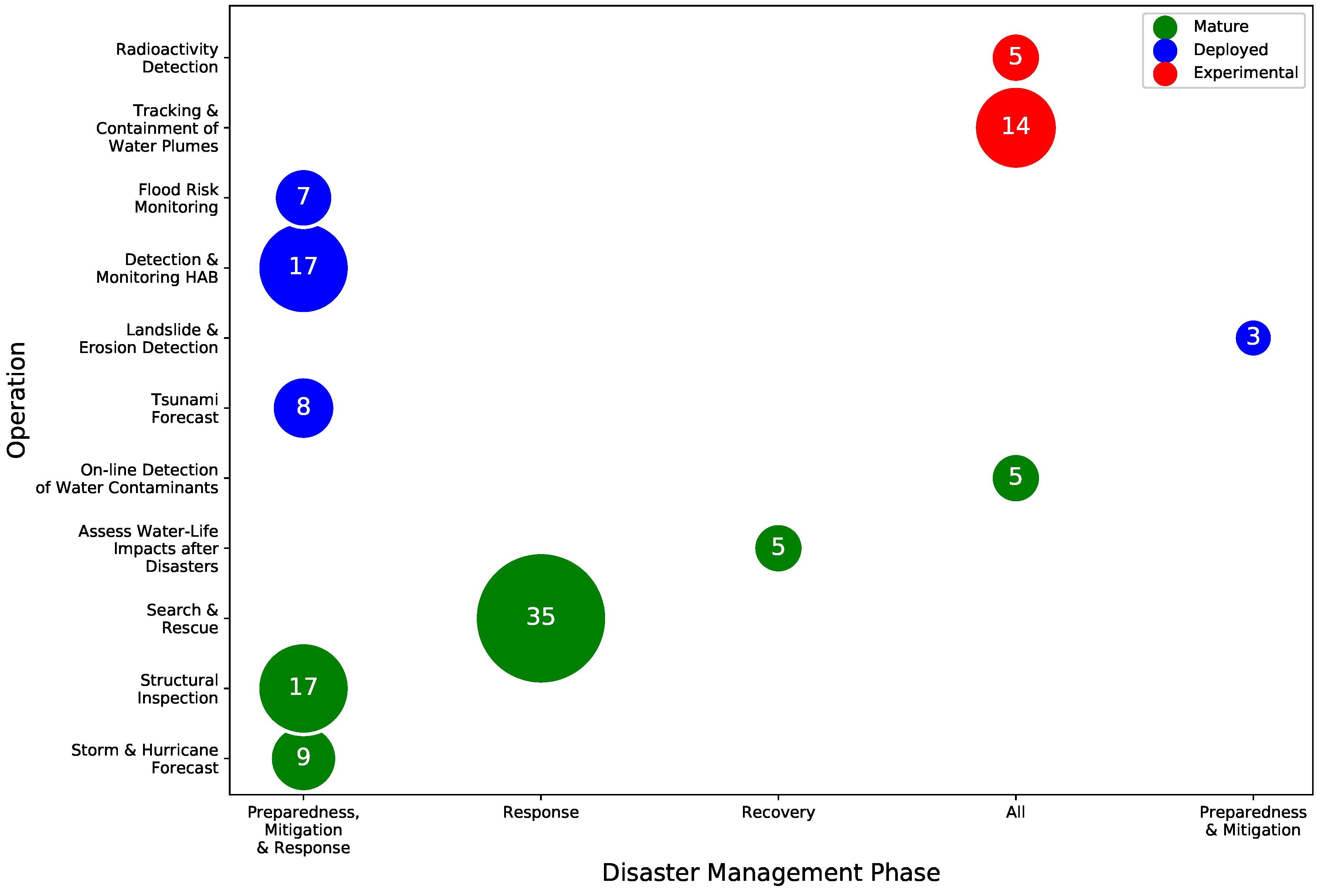
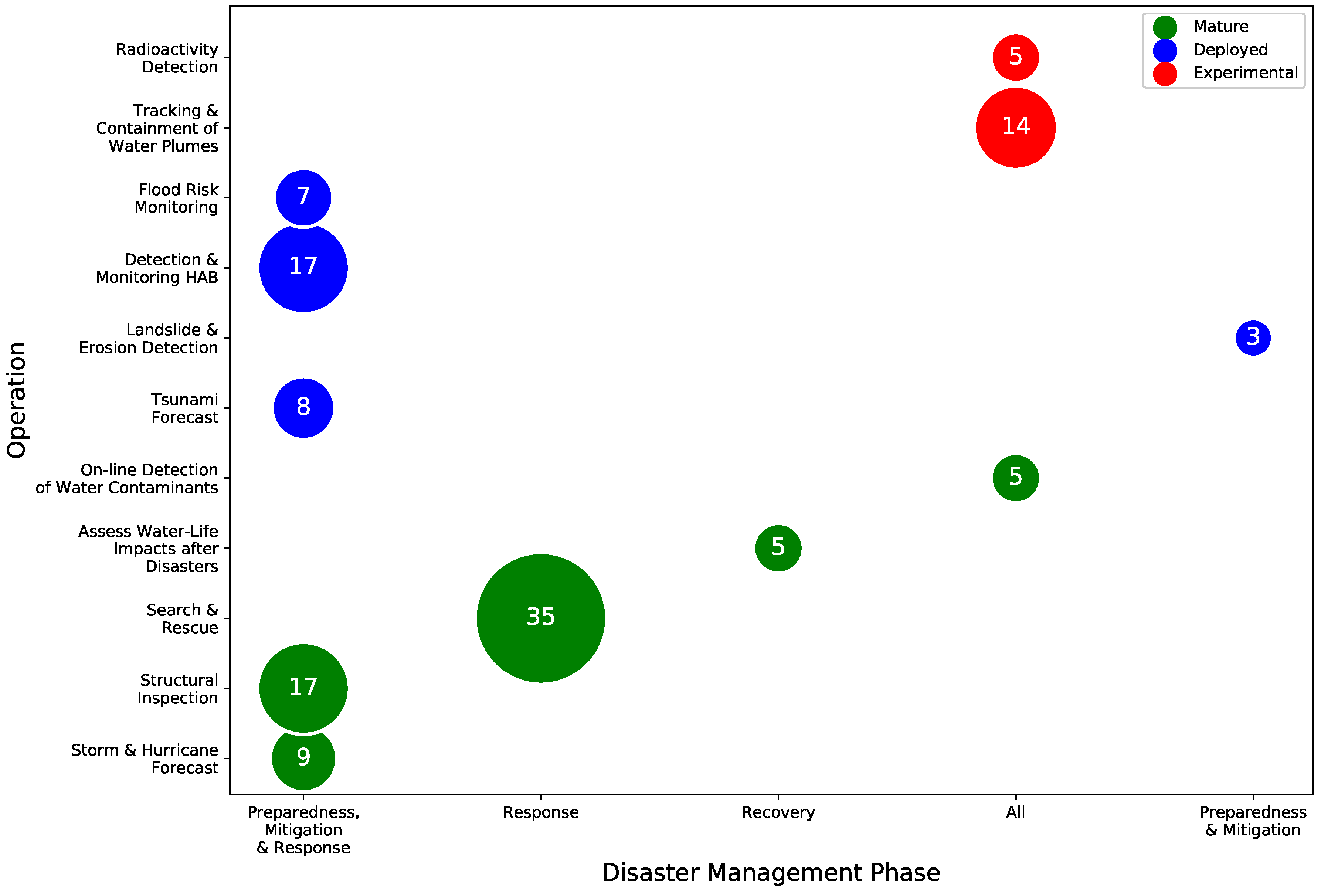
| Operation | DM Phase | Maturity |
|---|---|---|
| Storm and Hurricane Forecast | Preparedness, Mitigation & Response [61,62,63,64,65,66,67,68,69] | mature |
| Structural Inspection | Preparedness, Mitigation & Response [19,61,62,63,64,79,83,175,176,177,178,179,180,181,182,183,184] | mature |
| Search & Rescue | Response [21,66,189,190,191,192,193,194,197,198,199,200,201,202,203,204,207,209,210,211,212,213,214,216,217,218,219,220,221,222,223,224,226,227,228] | mature |
| Assess Water-Life Impacts after Disaster | Recovery [93,94,101,107,108] | mature |
| Online Detection of Water Contaminants | All [102,103,104,105,106] | mature |
| Tsunami Forecast | Preparedness, Mitigation & Response [53,54,55,56,57,58,59,60] | deployed |
| Landslide and Erosion Detection | Preparedness & Mitigation [76,77,91] | deployed |
| Detection & Monitoring HAB | Preparedness, Mitigation & Response [146,147,148,149,150,151,152,153,154,155,156,157,158,159,160,161,162] | deployed |
| Flood Risk Monitoring | Preparedness, Mitigation & Response [8,70,71,72,73,74,75] | deployed |
| Tracking & Containment of Water Plumes | All [95,109,110,111,112,113,114,115,116,117,118,119,120,121] | experimental |
| Radioactivity Detection | All [166,167,168,170,171] | experimental |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jorge, V.A.M.; Granada, R.; Maidana, R.G.; Jurak, D.A.; Heck, G.; Negreiros, A.P.F.; dos Santos, D.H.; Gonçalves, L.M.G.; Amory, A.M. A Survey on Unmanned Surface Vehicles for Disaster Robotics: Main Challenges and Directions. Sensors 2019, 19, 702. https://doi.org/10.3390/s19030702
Jorge VAM, Granada R, Maidana RG, Jurak DA, Heck G, Negreiros APF, dos Santos DH, Gonçalves LMG, Amory AM. A Survey on Unmanned Surface Vehicles for Disaster Robotics: Main Challenges and Directions. Sensors. 2019; 19(3):702. https://doi.org/10.3390/s19030702
Chicago/Turabian StyleJorge, Vitor A. M., Roger Granada, Renan G. Maidana, Darlan A. Jurak, Guilherme Heck, Alvaro P. F. Negreiros, Davi H. dos Santos, Luiz M. G. Gonçalves, and Alexandre M. Amory. 2019. "A Survey on Unmanned Surface Vehicles for Disaster Robotics: Main Challenges and Directions" Sensors 19, no. 3: 702. https://doi.org/10.3390/s19030702
APA StyleJorge, V. A. M., Granada, R., Maidana, R. G., Jurak, D. A., Heck, G., Negreiros, A. P. F., dos Santos, D. H., Gonçalves, L. M. G., & Amory, A. M. (2019). A Survey on Unmanned Surface Vehicles for Disaster Robotics: Main Challenges and Directions. Sensors, 19(3), 702. https://doi.org/10.3390/s19030702