Design of Plant Protection UAV Variable Spray System Based on Neural Networks

 ,
, 

Abstract
:1. Introduction
2. Design of the Neural Network Model
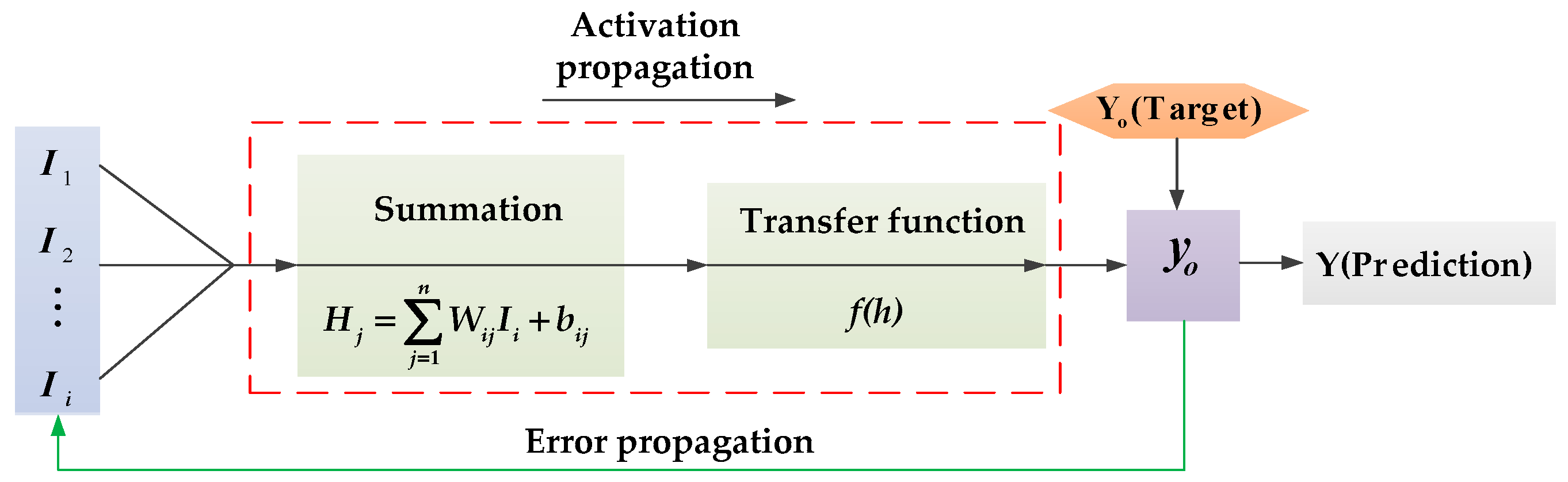
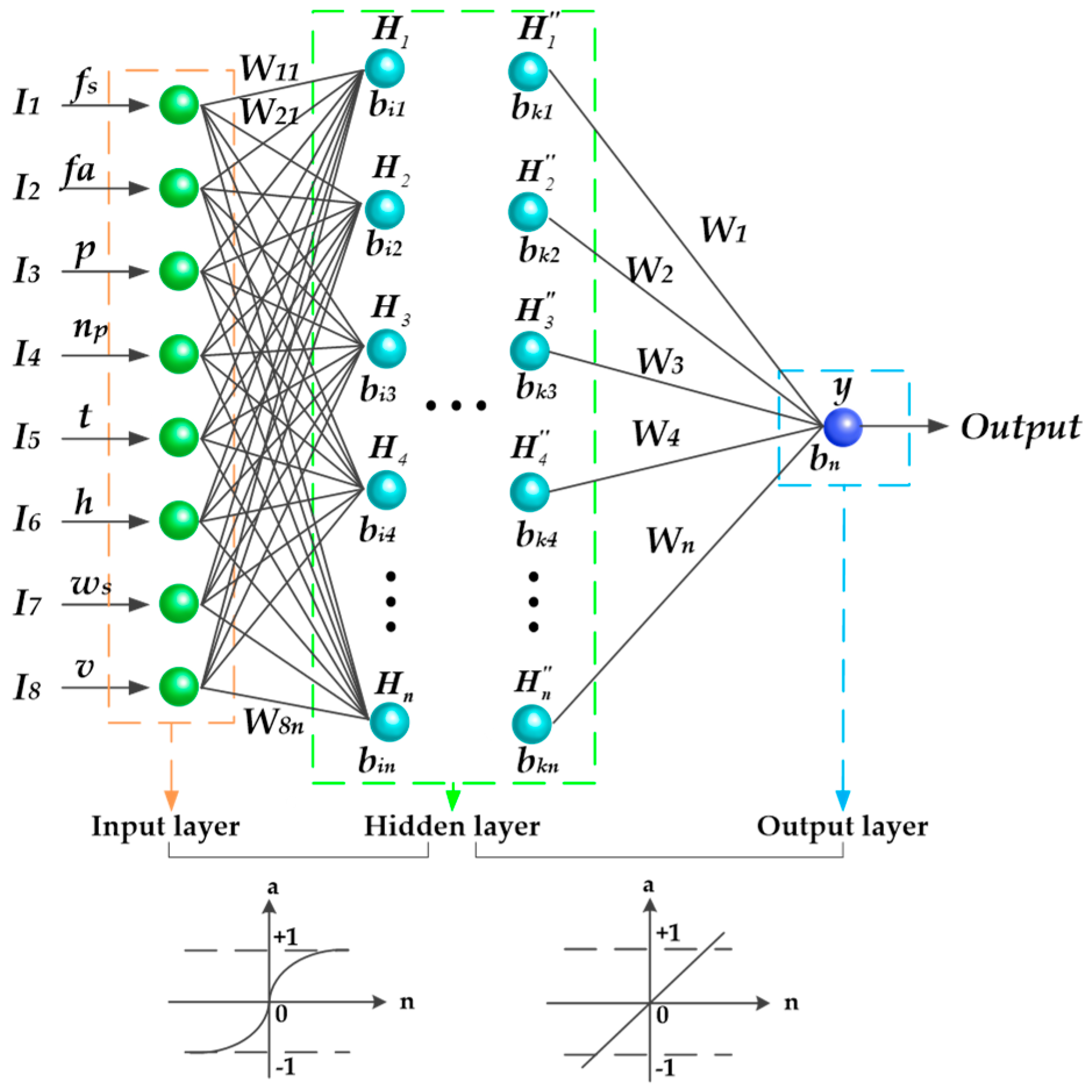
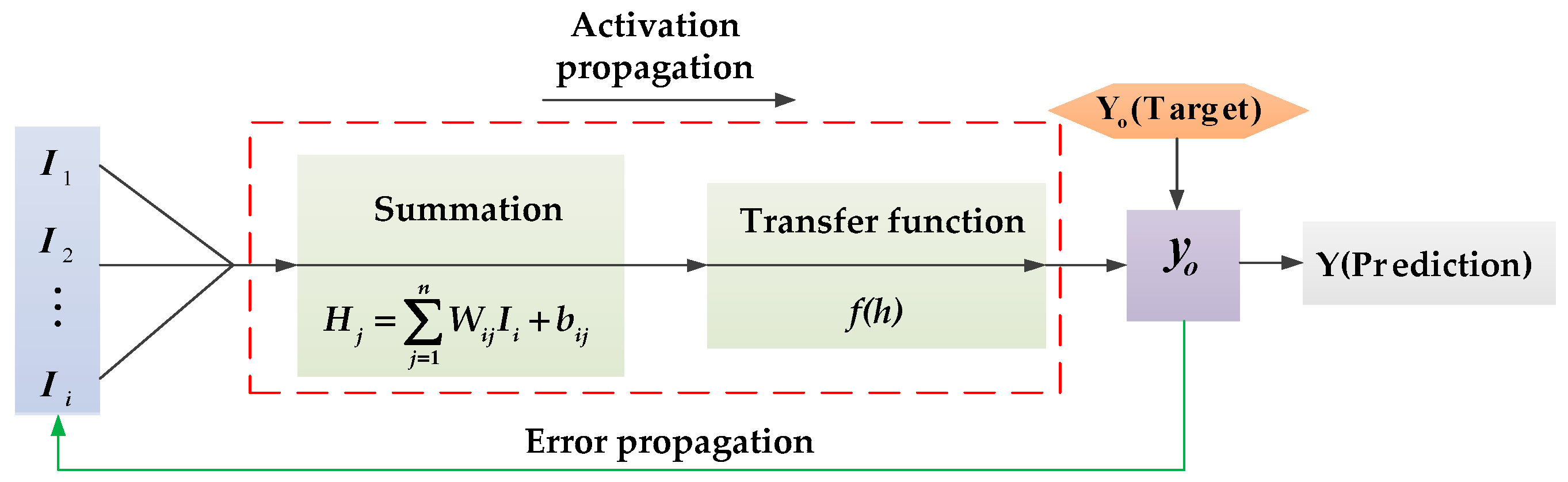
2.1. Introduction of BP Neural Network
2.2. Database
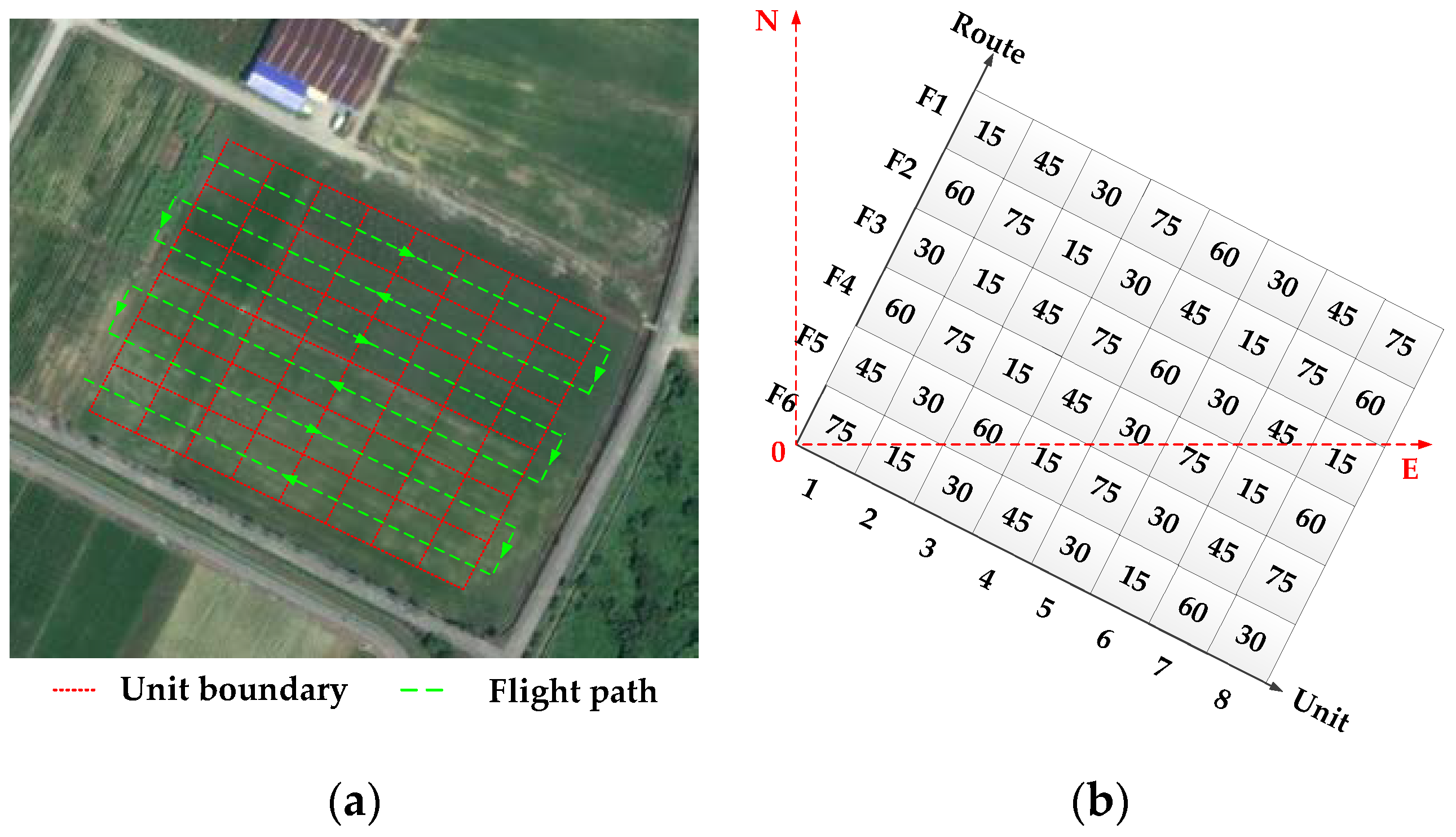
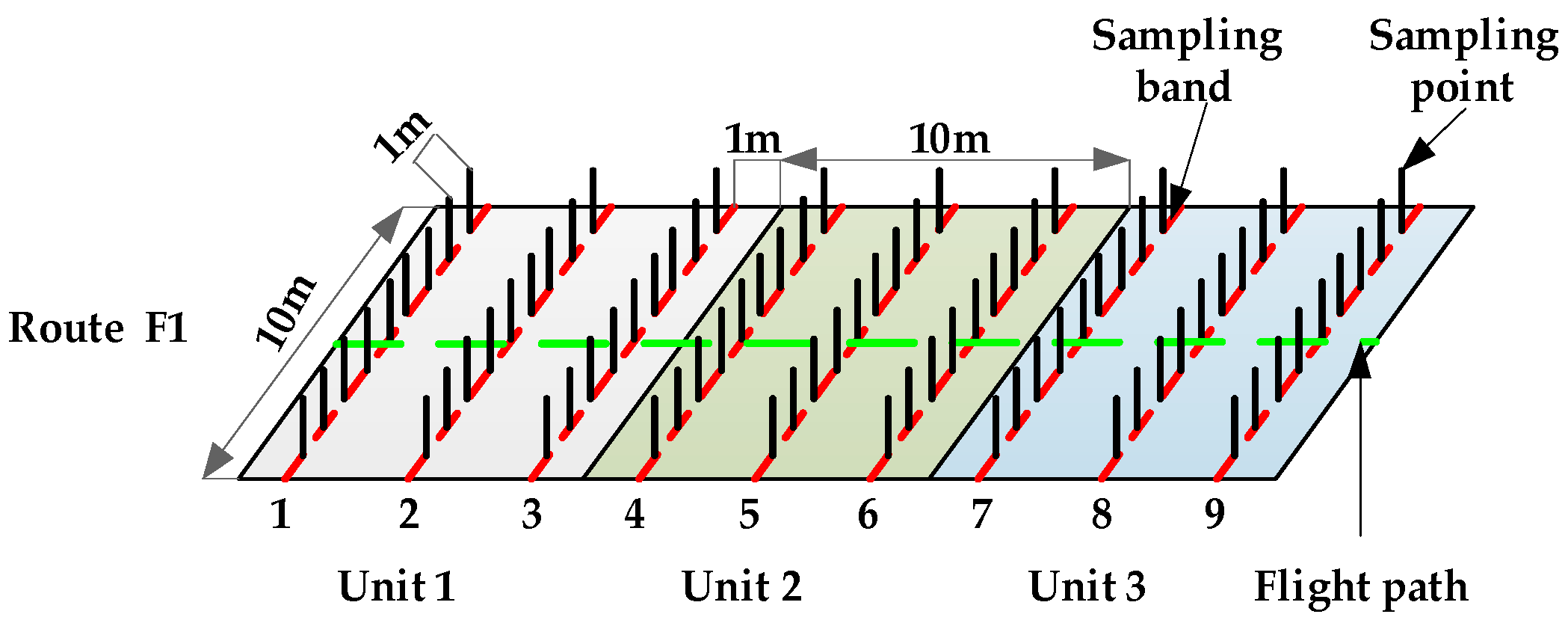
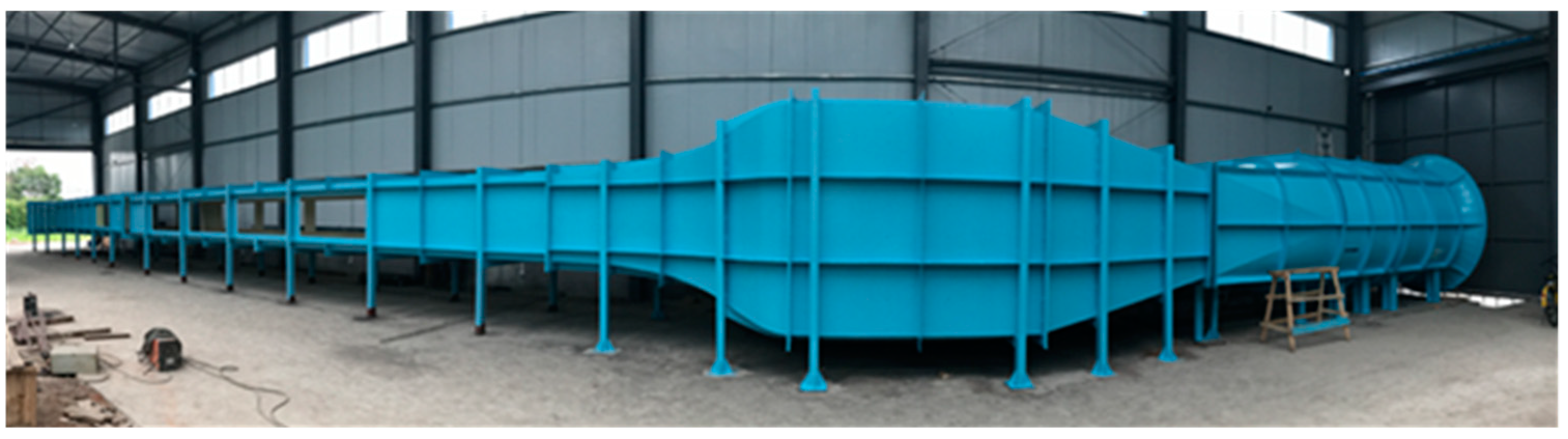
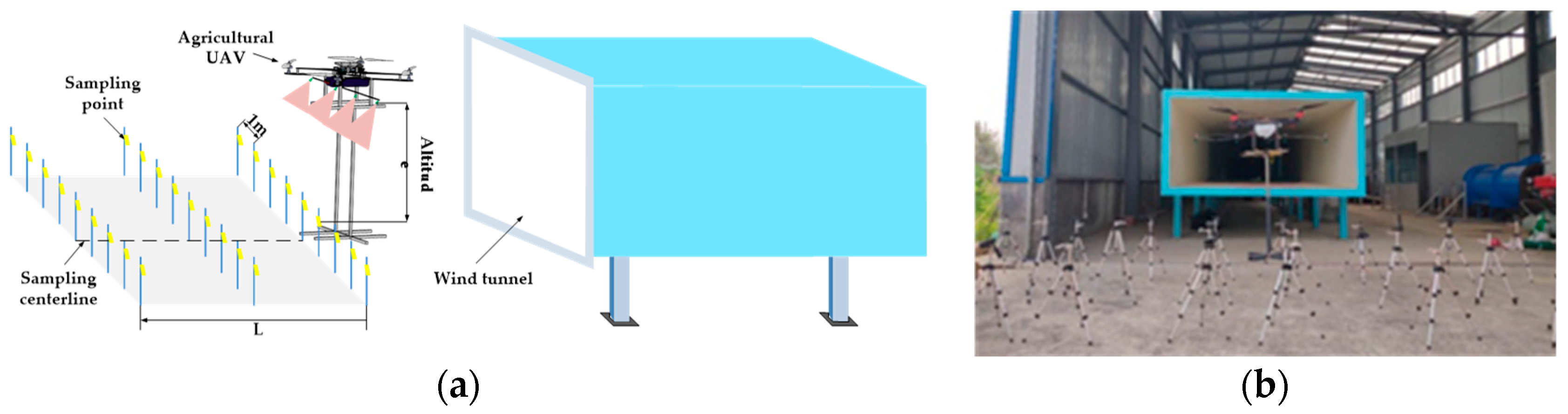
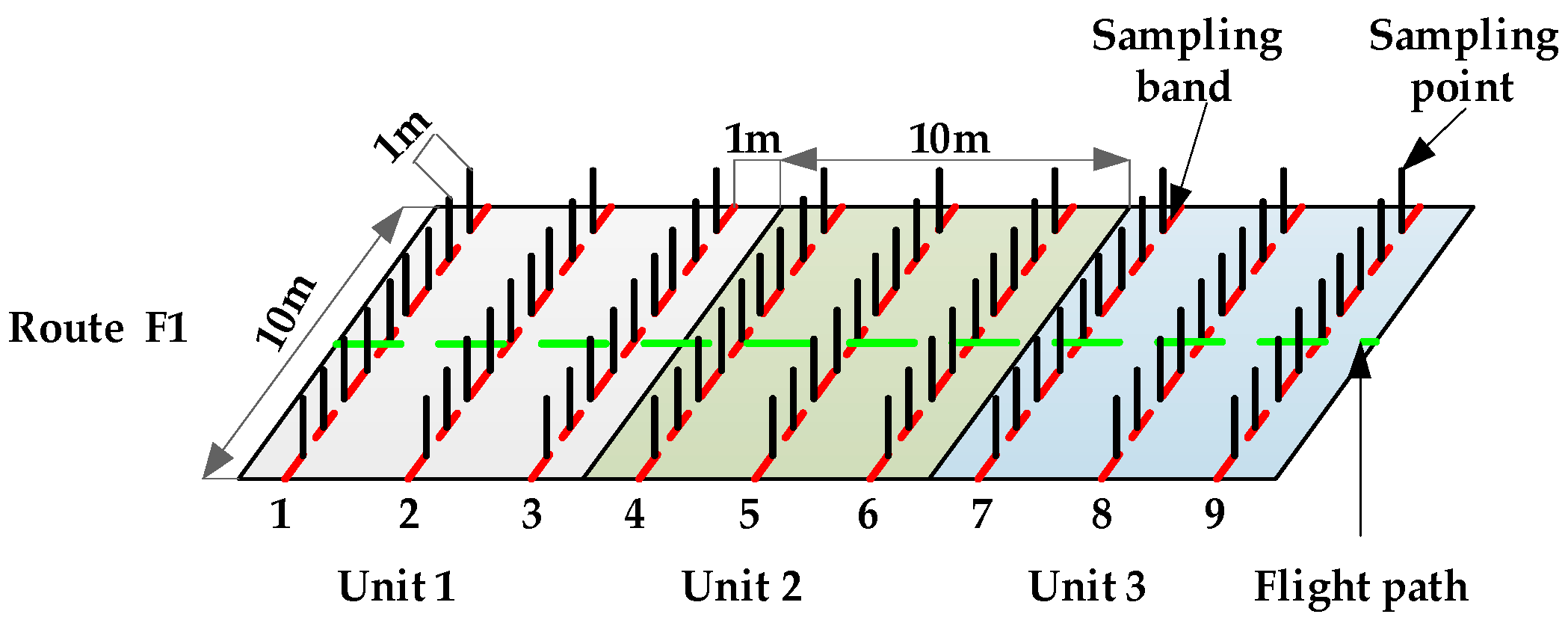
2.2.1. Sample Data Collection Experiment Scheme
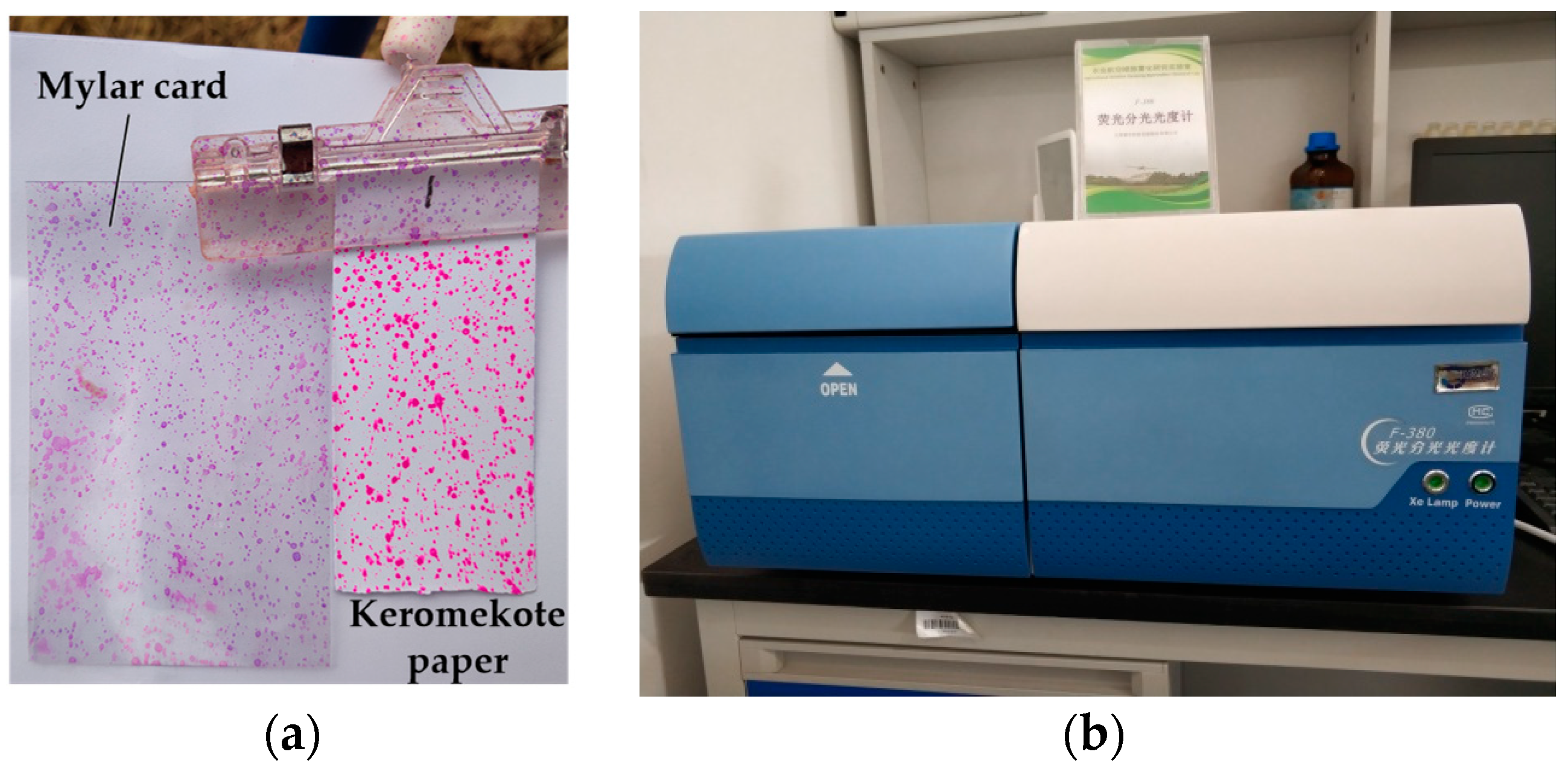
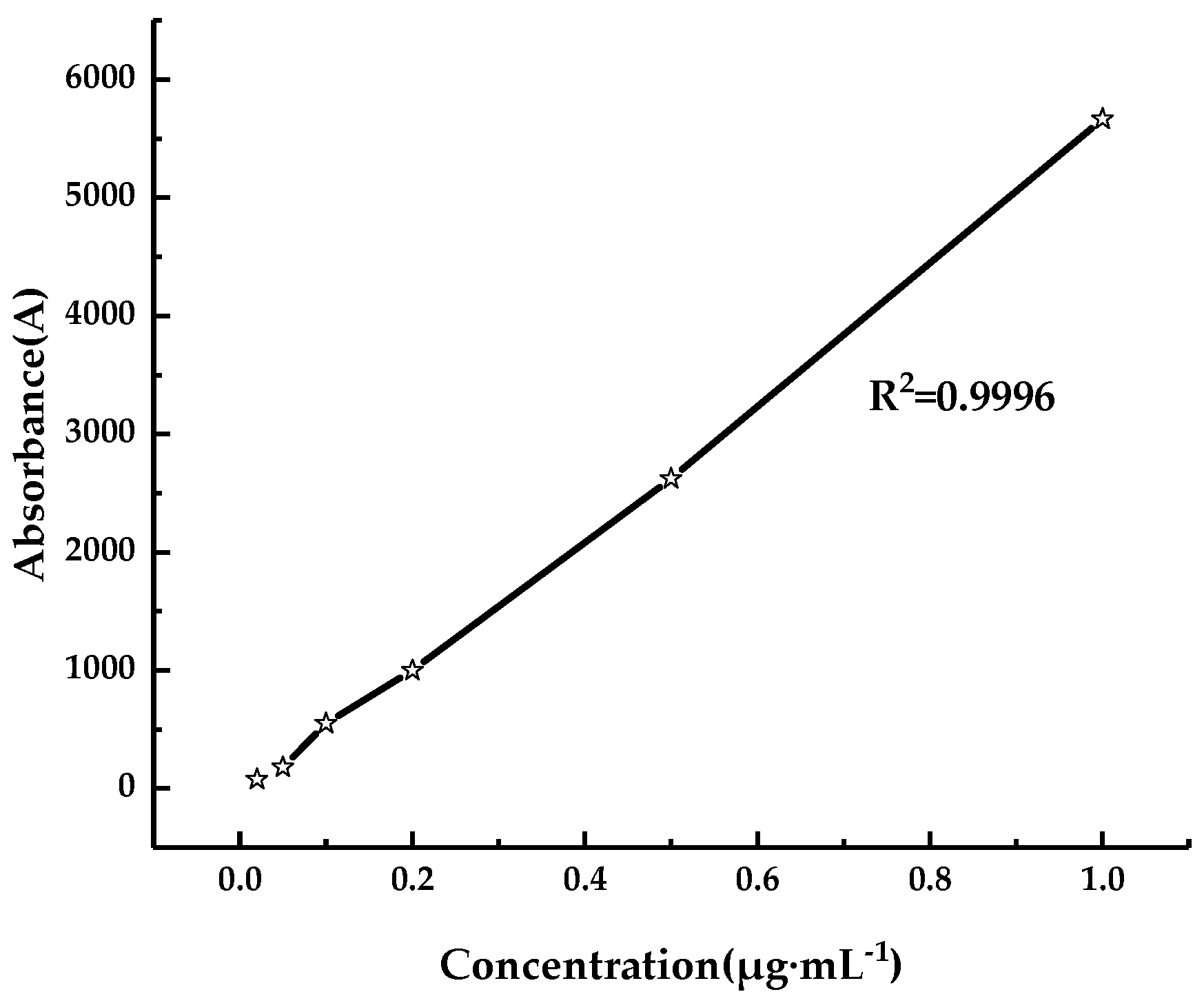
2.2.2. Sample Data Processing
2.2.3. Sample Data Results
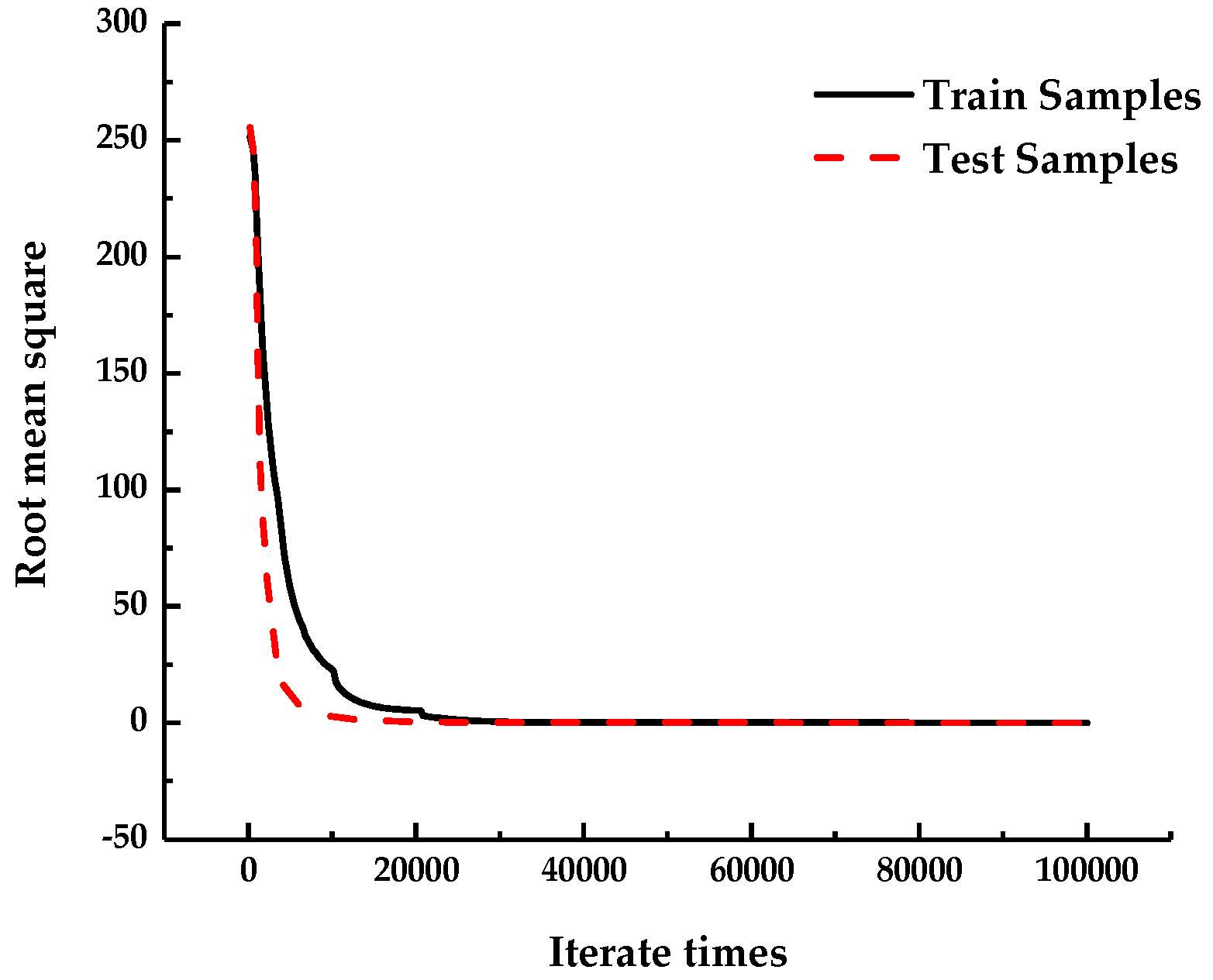
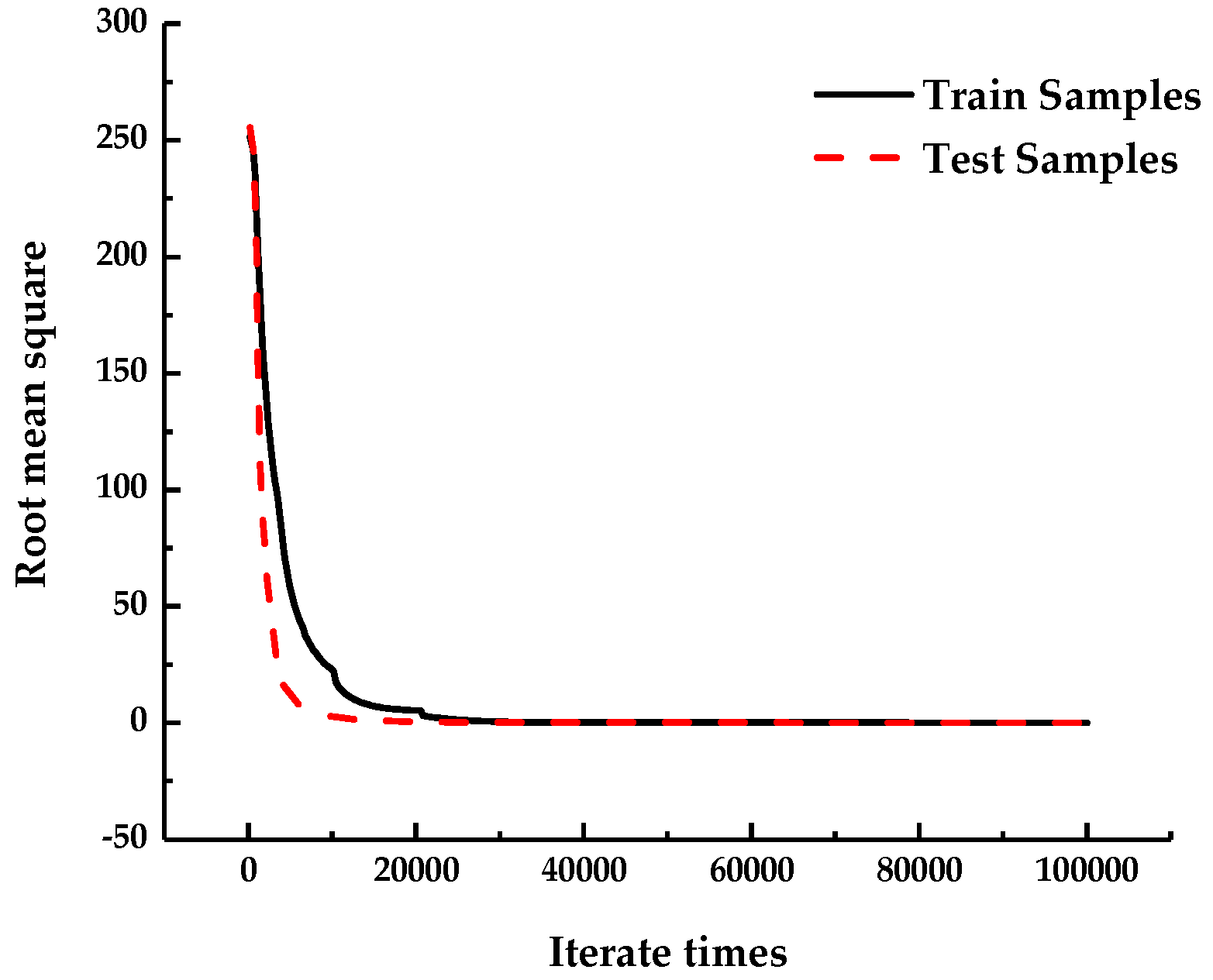
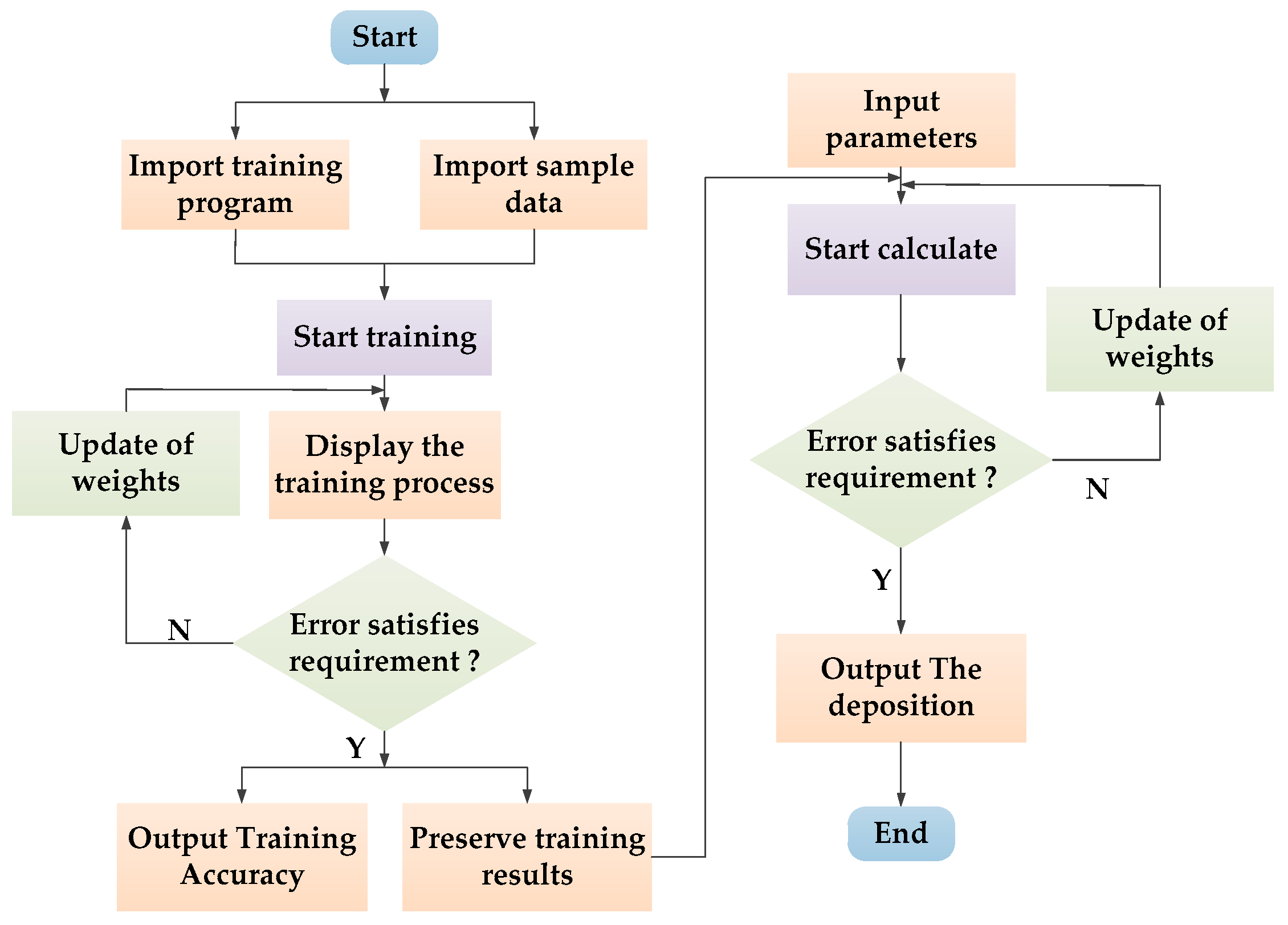
2.3. The Training Process of BP Neural Network
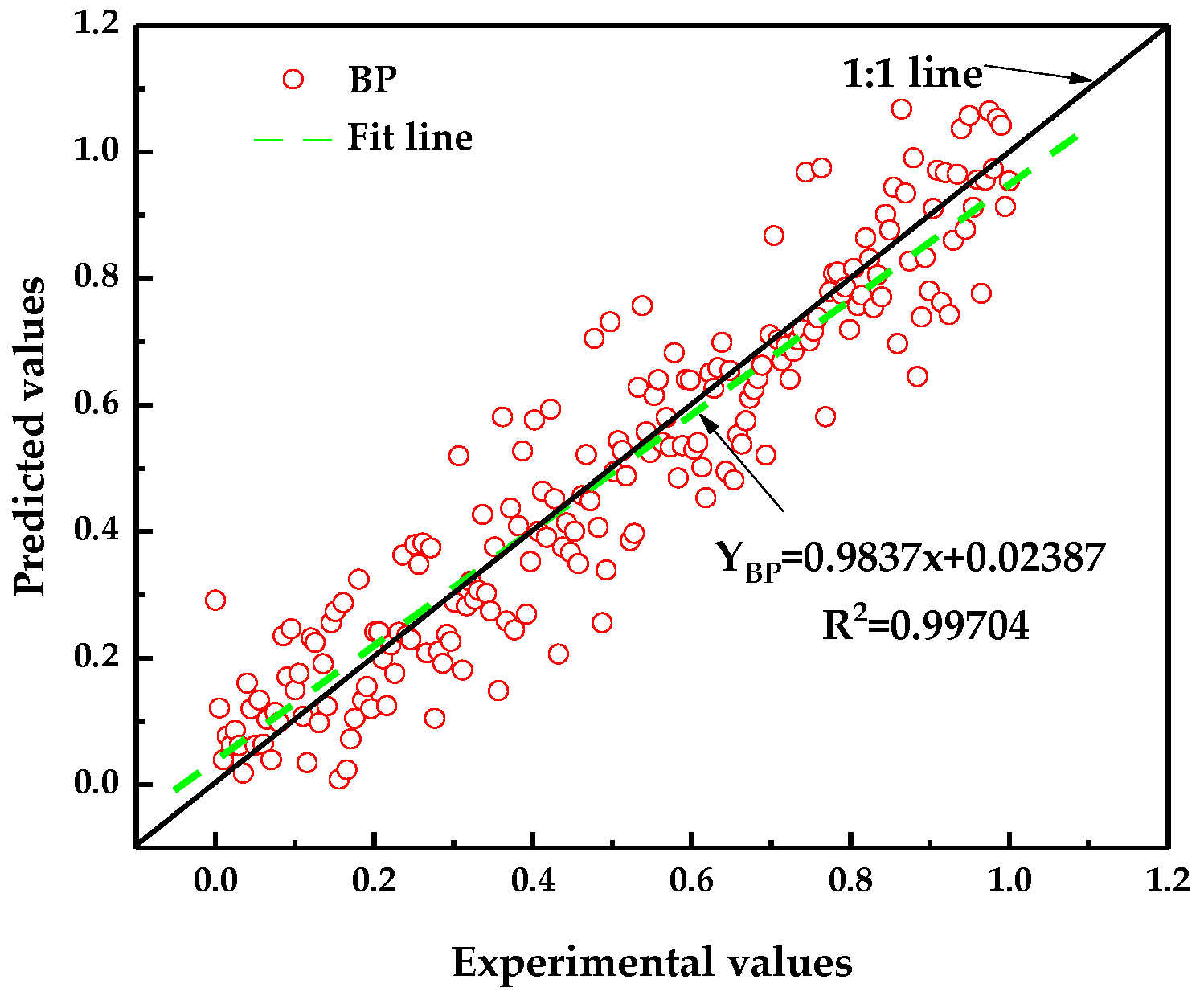
2.4. Performances of BP Neural Network Models
3. Design of Variable Spray System
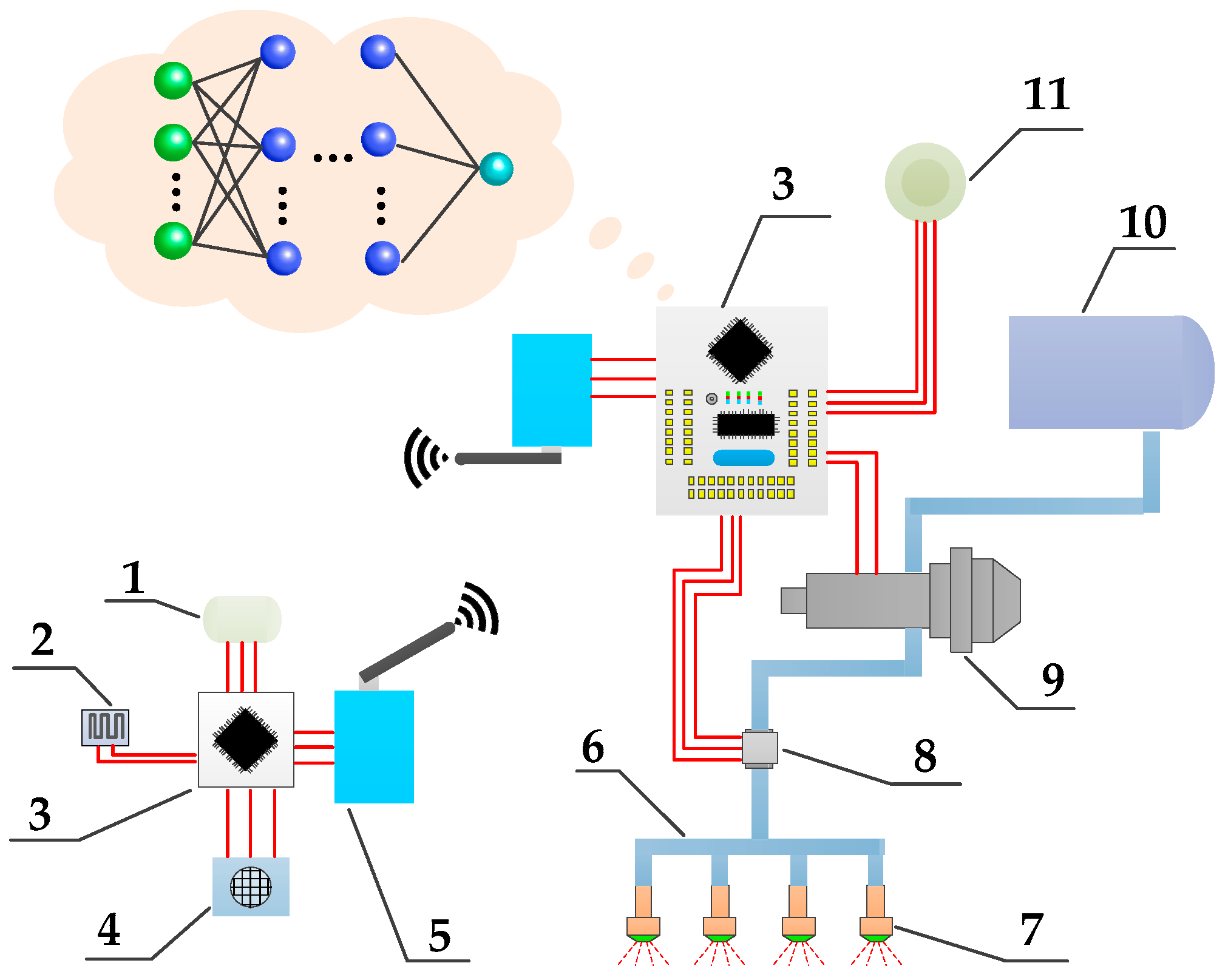
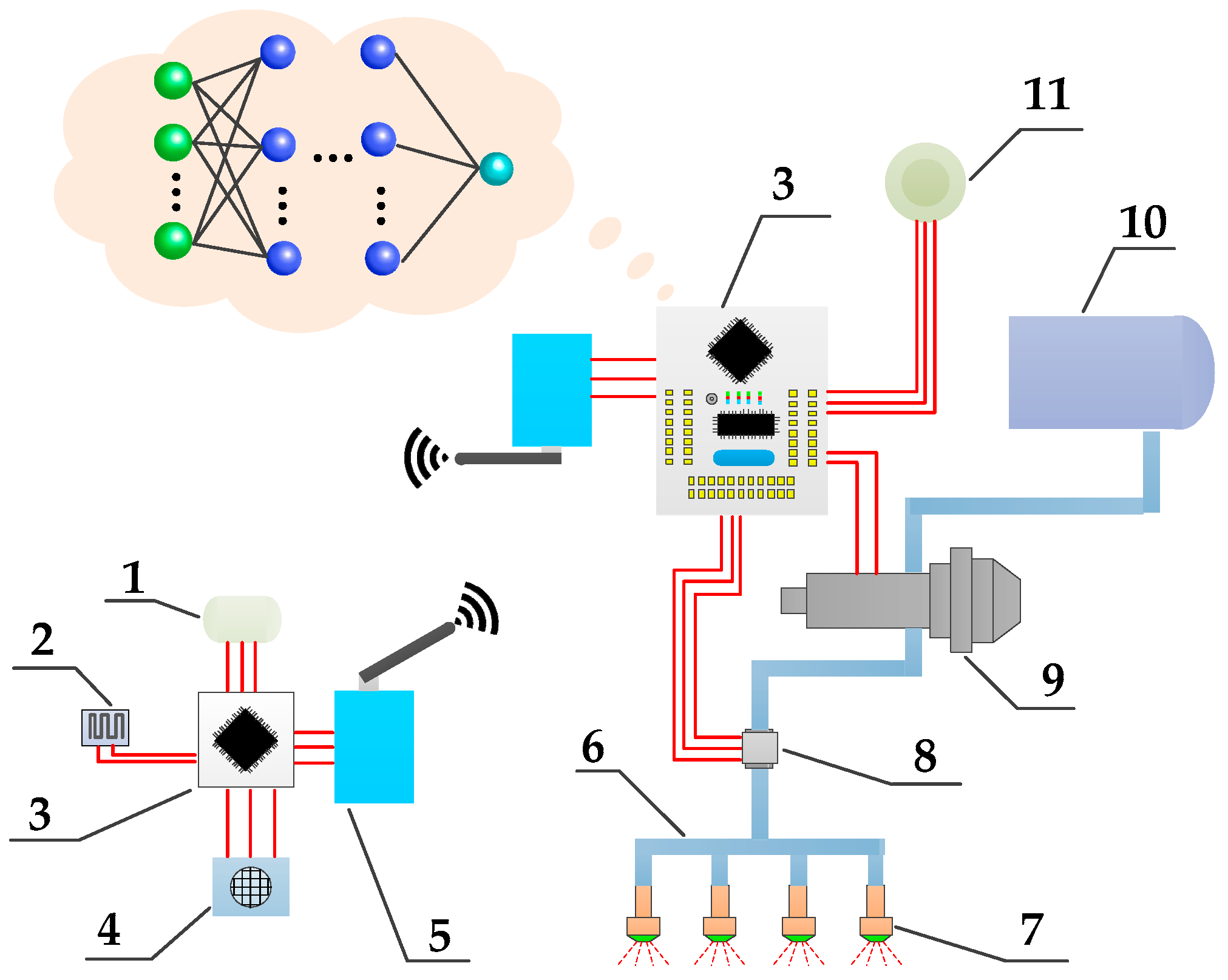
3.1. Working Principle of Variable Spray System
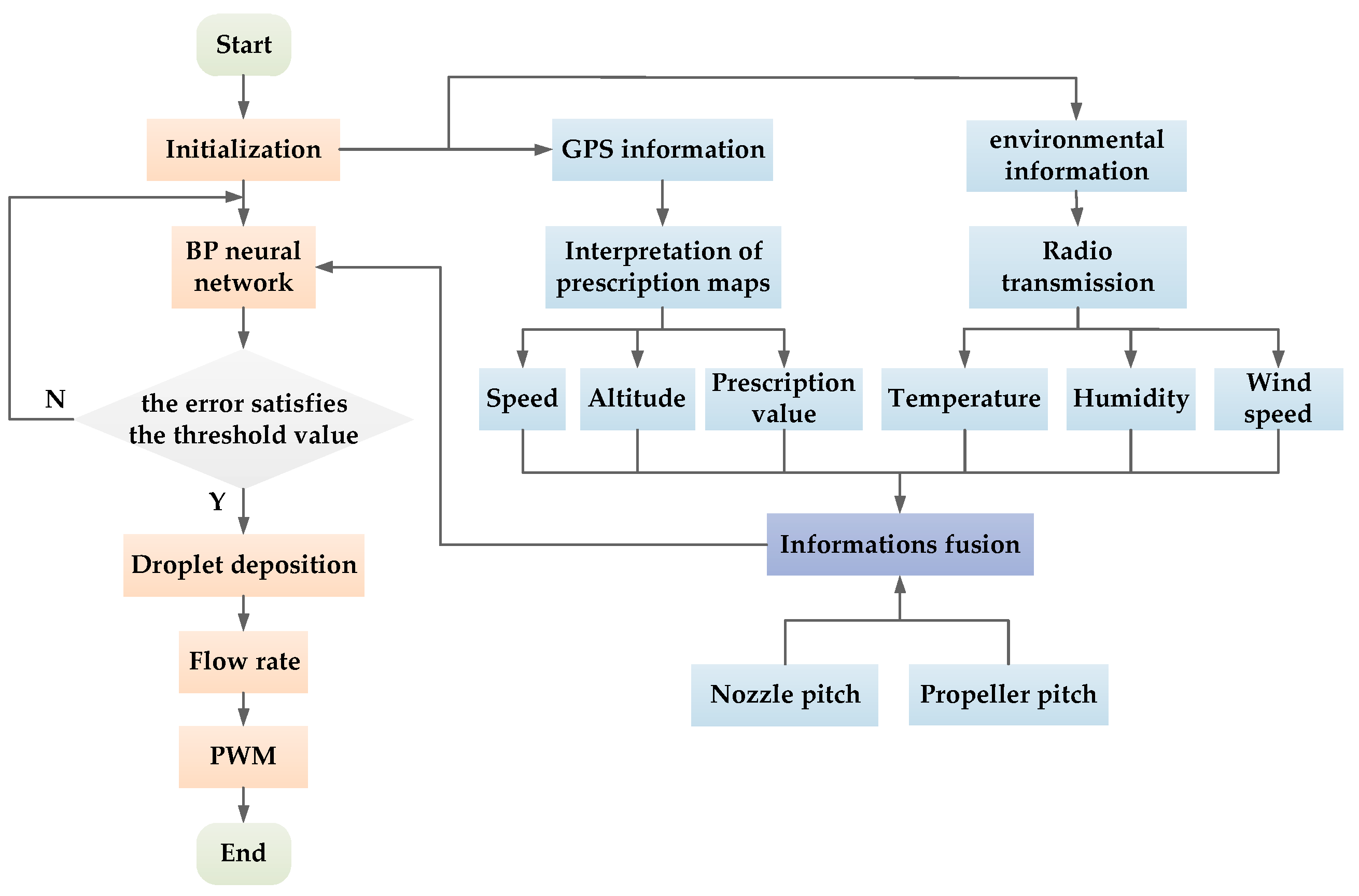
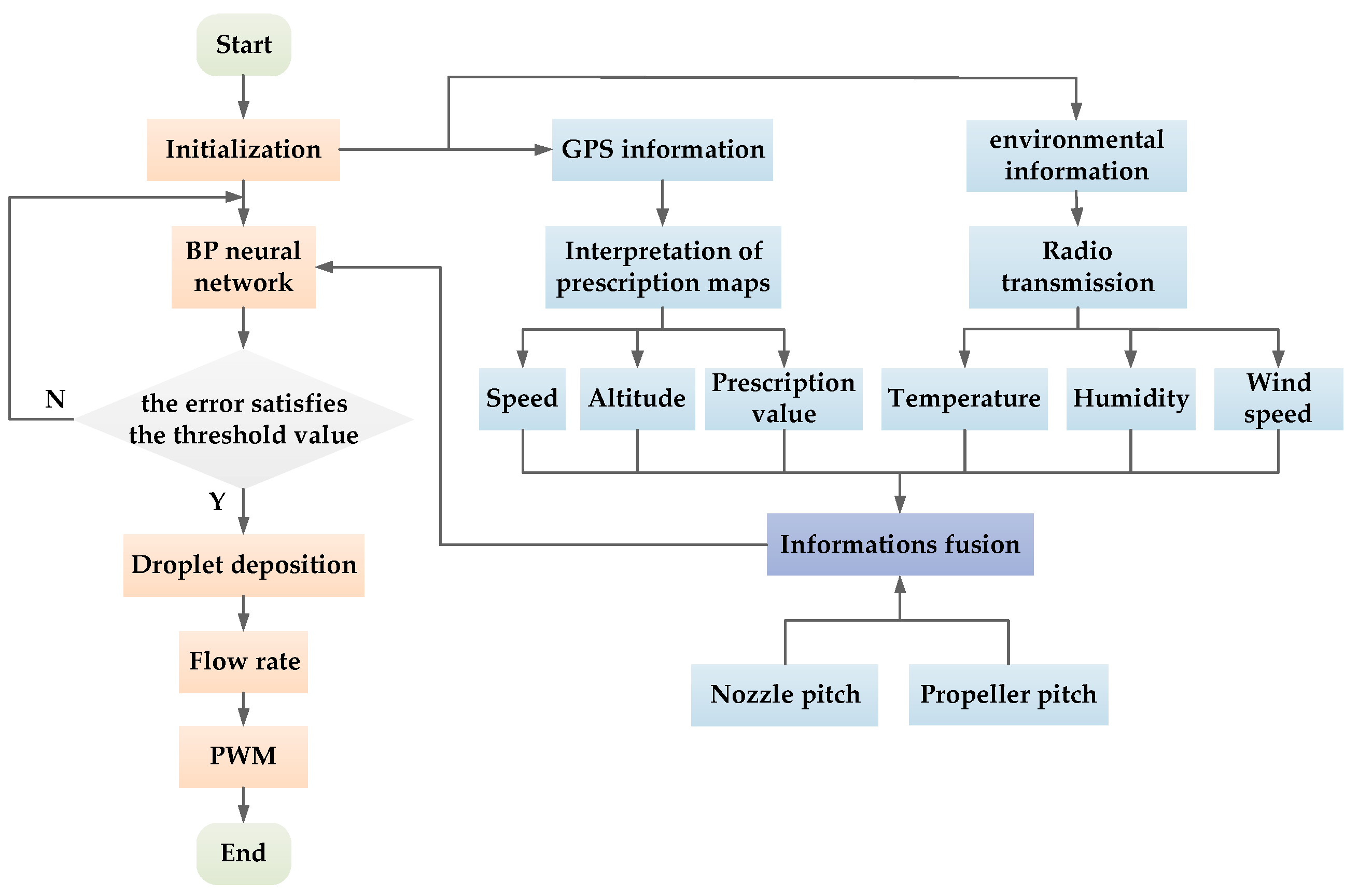
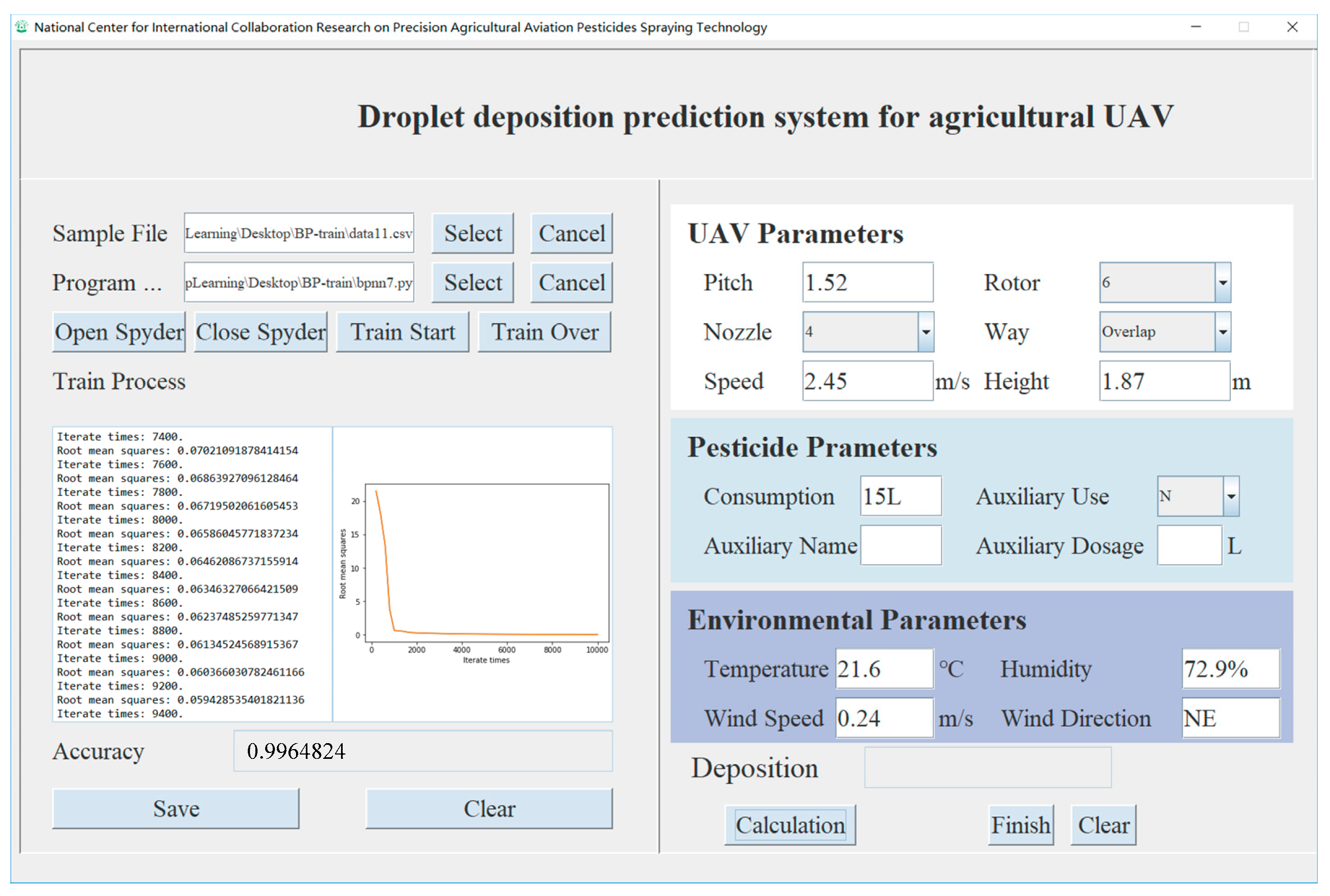
3.2. Design of the System Program
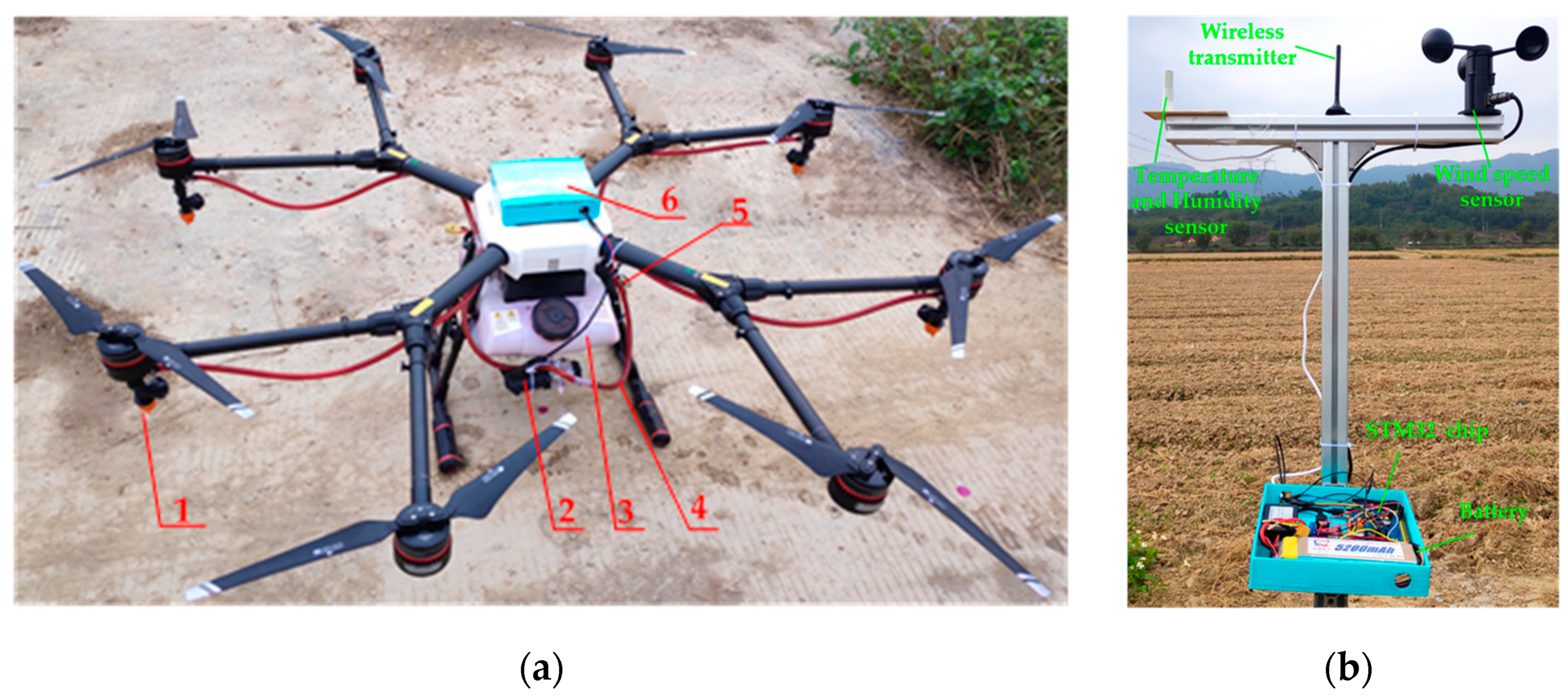
4. Experiments
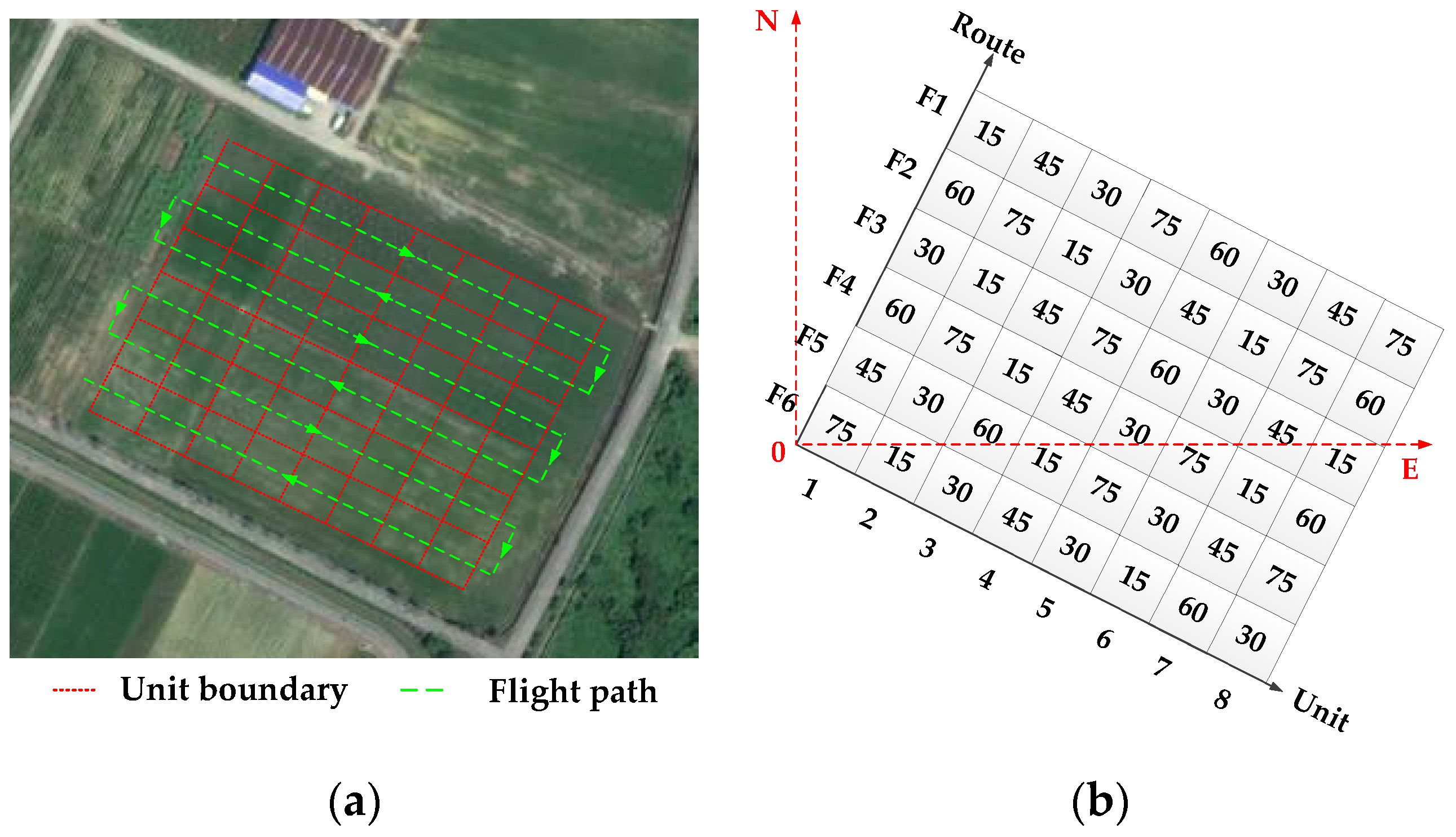
4.1. Experiment Scheme
4.2. Experiment Data Acquisition
4.3. Experiment Results
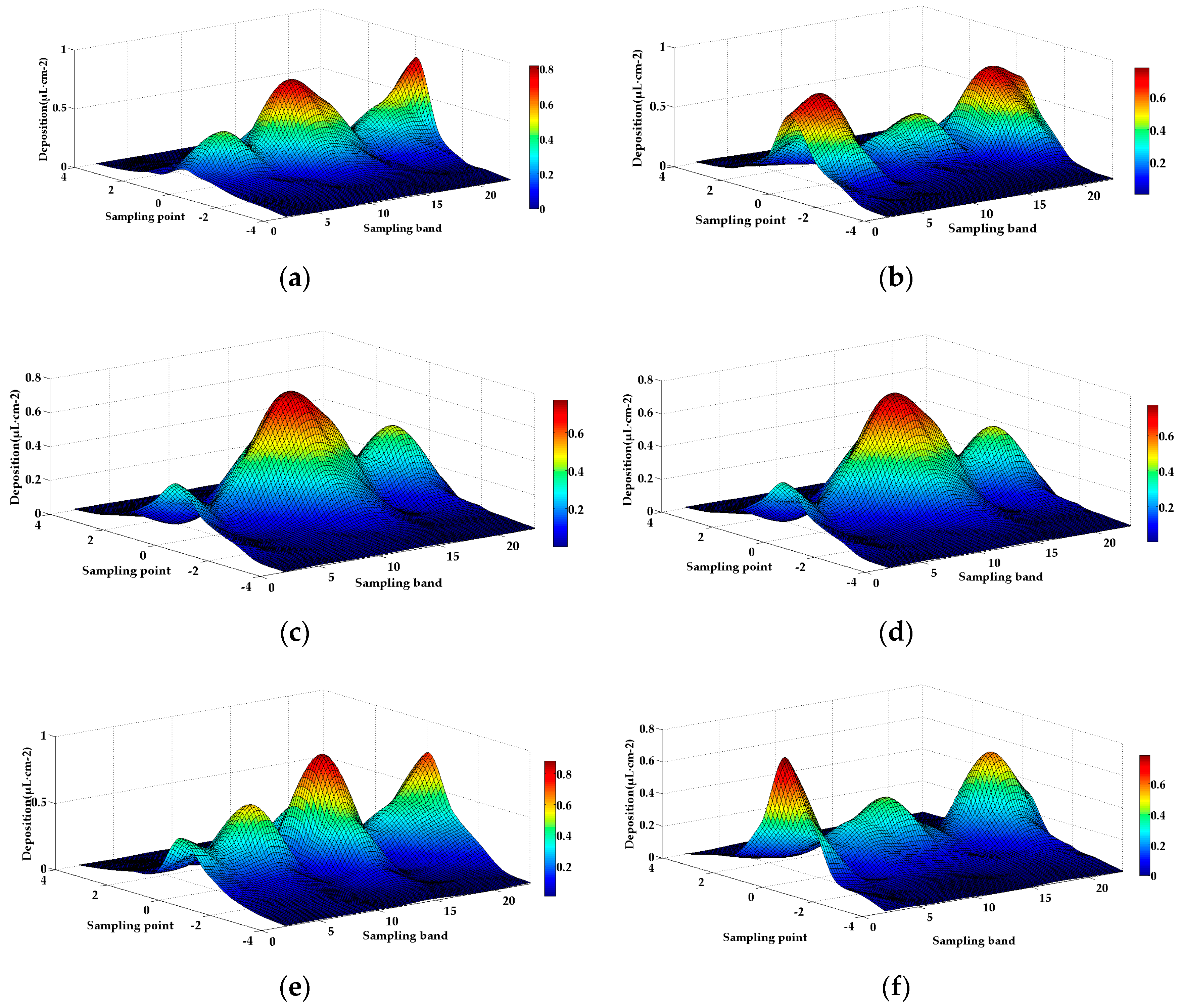
4.3.1. Predicted and Experimental Depositions
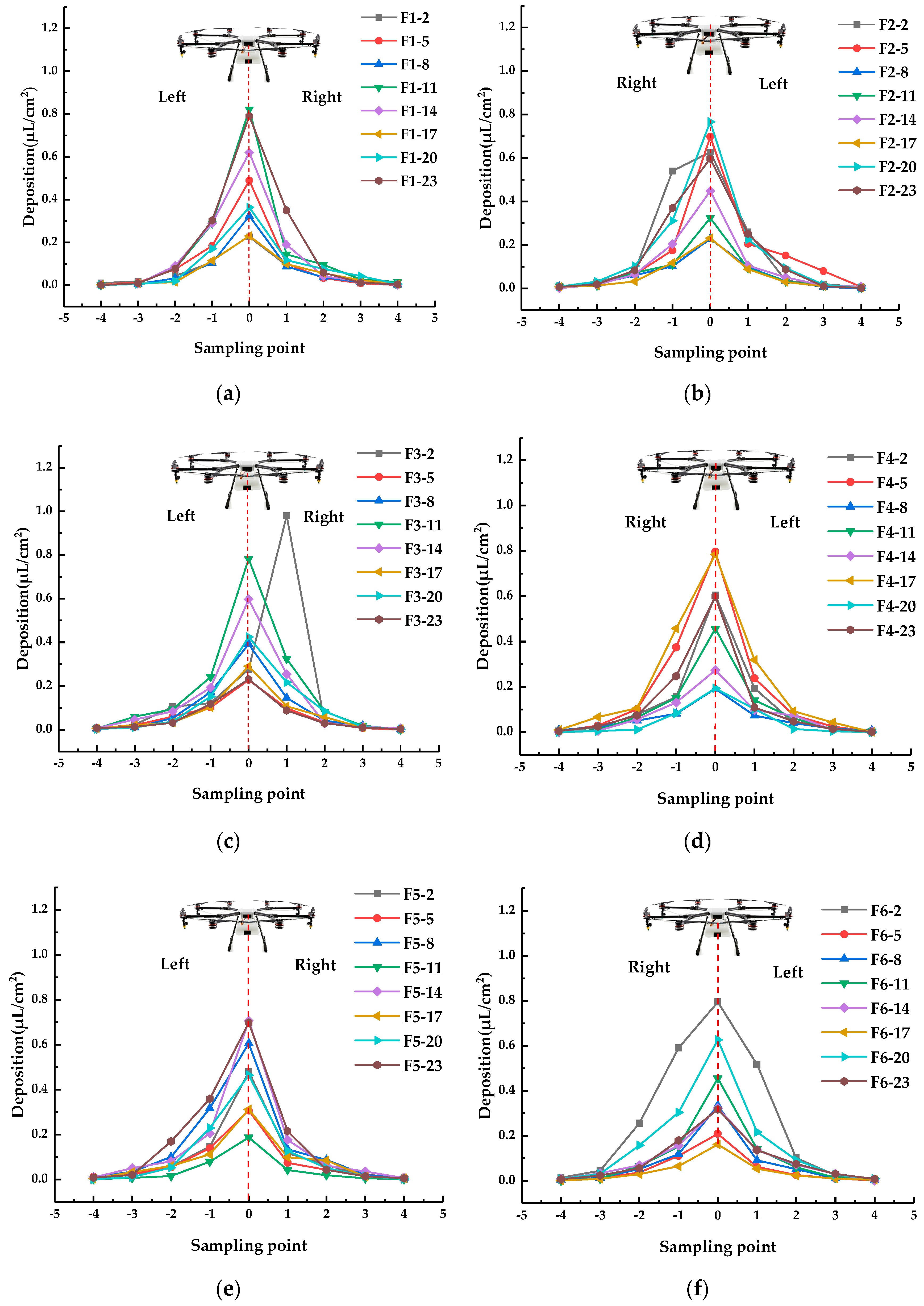
4.3.2. Droplet Deposition Analysis
4.3.3. Deposition of the Boundary of Operation Unit
5. Conclusions
- (1)
- Based on the existing data of plant protection UAV operation, combined with the error back propagation neural network technology, a neural network model which affects the spray droplet deposition factor and deposition volume was trained. These factors include environment temperature, humidity, wind speed, flight speed, flight altitude, prescription value, nozzle pitch and propeller pitch. The training error of the BP neural network is 0.003.
- (2)
- The variable spray technology is combined with BP neural network technology to predict spray deposition in real time. The droplet depositions meet the prescription value requirements. The error between the predicted droplet deposition and actual droplet deposition is less than 20%.
- (3)
- The UAV variable spray system based on neural network is evenly sprayed. From the change of prescription value to the response time of regulated flow is within 0.25 s, the spray range meets the operational requirements of plant protection UAVs.
Author Contributions
Funding
Conflicts of Interest
References
- Guo, Y.W.; Yuan, H.Z.; He, X.K.; Shao, Z.R. Analysis on the development and prospect of agricultural aviation protection in China. Chin. J. Plant Prot. 2014, 10, 78–82. (In Chinese) [Google Scholar]
- Xue, X.Y.; Tu, K.; Qin, W.C.; Lan, Y.B.; Zhang, H.H. Drift and deposition of ultra-low altitude and low volume application in paddy field. Int. J. Agric. Biol. Eng. 2014, 7, 23–28. [Google Scholar]
- Wang, M.; Jin, H. Spray-induced gene silencing: A powerful innovative strategy for crop protection. Trends Microbiol. 2017, 25, 4–6. [Google Scholar] [CrossRef] [PubMed]
- Qin, W.C.; Qiu, B.J.; Xue, X.Y.; Chen, C.; Xu, Z.F.; Zhou, Q.Q. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 2016, 85, 79–88. [Google Scholar] [CrossRef]
- Lan, Y.B.; Chen, S.D.; Bradley, K.F. Current status and future trends of precision agricultural aviation technologies. Int. J. Agric. Biol. Eng. 2017, 10, 1–17. [Google Scholar]
- Lou, Z.X.; Xin, F.; Han, X.Q.; Lan, Y.B.; Duan, T.Z.; Fu, W. Effect of Unmanned Aerial Vehicle Flight Height on Droplet Distribution, Drift and Control of Cotton Aphids and Spider Mites. Agronomy 2018, 8, 187. [Google Scholar] [CrossRef]
- Yang, S.; Yang, X.; Mo, J. The application of unmanned aircraft systems to plant protection in China. Precis. Agric. 2018, 19, 278–292. [Google Scholar] [CrossRef]
- Zhou, Z.Y.; Ming, R.; Zang, Y.; He, X.G.; Luo, X.W.; Lan, Y.B. Development status and countermeasures of agricultural aviation in China. Trans. Chin. Soc. Agric. Eng. 2017, 33, 1–13. (In Chinese) [Google Scholar]
- He, X.K.; Bonds, J.; Herbst, A.; Langenakens, J. Recent development of unmanned aerial vehicle for plant protection in East Asia. Int. J. Agric. Biol. Eng. 2017, 10, 18–30. [Google Scholar]
- Mogili, U.R.; Deepak, B.B.V.L. Review on application of drone systems in precision agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Cruvinel, P.E.; Oliveira, V.A.; Mercaldi, H.V.; Penaloza, E.A.; Felizardo, K.R. An advanced sensors-based platform for the development of agricultural sprayers. In Sensors and Applications in Measuring and Automation Control Systems; IFSA: Indianapolis, IN, USA, 2016; pp. 181–204. [Google Scholar]
- Hewitt, A.J. Droplet size spectra classification categories in aerial application scenarios. Crop Prot. 2008, 27, 1284–1288. [Google Scholar] [CrossRef]
- El Aissaoui, A. A Feasibility Study of Direct Injection Spraying Technology for Small Scale Farms: Modeling and Design of a Process Control System. Doctoral Dissertation, Universite de Liege, Liege, Belgique, 2015. [Google Scholar]
- Zhang, Y.; Li, Y.; He, Y.; Liu, F.; Cen, H.; Fang, H. Near ground platform development to simulate UAV aerial spraying and its spraying test under different conditions. Comput. Electron. Agric. 2018, 148, 8–18. [Google Scholar] [CrossRef]
- Deng, W.; Zhao, C.; Chen, L.; Wang, X. Constant pressure control for variable-rate spray using closed-loop proportion integration differentiation regulation. J. Agric. Eng. 2016, 47, 148–156. [Google Scholar] [CrossRef]
- Wang, L.; Chen, D.; Yao, Z.; Ni, X.D.; Wang, S.M. Research on the prediction model and its influencing factors of droplet deposition area in the wind tunnel environment based on UAV spraying. Ifac-Pap. 2018, 51, 274–279. [Google Scholar]
- Wang, S.L.; Song, J.L.; He, X.K.; Song, L.; Wang, X.N.; Wang, C.L.; Wang, Z.C.; Ling, Y. Performances evaluation of four typical unmanned aerial vehicles used for pesticide application in China. Int. J. Agric. Biol. Eng. 2017, 10, 22–31. [Google Scholar]
- Mirahadi, F.; Zayed, T. Simulation-based construction productivity forecast using neural network driven fuzzy reasoning. Autom. Constr. 2016, 65, 102–115. [Google Scholar] [CrossRef]
- Gao, P.; Zhang, Y.; Zhang, L.; Noguchi, R.; Ahamed, T. Development of a Recognition System for Spraying Areas from Unmanned Aerial Vehicles Using a Machine Learning Approach. Sensors. 2019, 19, 313. [Google Scholar] [CrossRef] [PubMed]
- Kamilaris, A.; Kartakoullis, A.; Prenafeta-Boldú, F.X. A review on the practice of big data analysis in agriculture. Comput. Electronics Agric. 2017, 143, 23–37. [Google Scholar] [CrossRef]
- Patel, A.D.; Agrawal, A.; Dave, R.H. Investigation of the effects of process variables on derived properties of spray dried solid-dispersions using polymer based response surface model and ensemble artificial neural network models. Eur. J. Pharm. Biopharm. 2014, 86, 404–417. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Fang, G.; Huang, X.; Zhang, Y. Water Quality Prediction Model of a Water Diversion Project Based on the Improved Artificial Bee Colony–Backpropagation Neural Network. Water 2018, 10, 806. [Google Scholar] [CrossRef]
- Azizpanah, A.; Rajabipour, A.; Alimardani, R.; Kheiralipour, K.; Mohammadi, V. Precision spray modeling using image processing and artificial neural network. Agric. Eng. Int. CIGR J. 2015, 17, 65–74. [Google Scholar]
- Faust, O.; Hagiwara, Y.; Hong, T.J.; Lih, O.S.; Acharya, U.R. Deep learning for healthcare applications based on physiological signals: A review. Comput. Methods Progr. Biomed. 2018, 161, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Banerjee, D.; Muldrey, B.; Wang, X.; Sen, S.; Chatterjee, A. Self-learning RF receiver systems: Process aware real-time adaptation to channel conditions for low power operation. IEEE Trans. Circuits Syst. I Regul. Pap. 2017, 64, 195–207. [Google Scholar] [CrossRef]
- Khosravi, A.; Koury, R.N.N.; Machado, L.; Pabon, J.J.G. Prediction of wind speed and wind direction using artificial neural network, support vector regression and adaptive neuro-fuzzy inference system. Sustain. Energy Technol. Assess. 2018, 25, 146–160. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef] [PubMed]
- Golhani, K.; Balasundram, S.K.; Vadamalai, G.; Pradhan, B. A review of neural networks in plant disease detection using hyperspectral data. Inf. Process. Agric. 2018, 5, 354–371. [Google Scholar] [CrossRef]
- Yu, F.; Xu, X.Z. A short-term load forecasting model of natural gas based on optimized genetic algorithm and improved BP neural network. Appl. Energy 2014, 134, 102–113. [Google Scholar] [CrossRef]
- Tian, W.; Meng, F.; Liu, L.; Li, Y.; Wang, F. Lifetime prediction for organic coating under alternating hydrostatic pressure by artificial neural network. Sci. Rep. 2017, 7, 40827. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alzoubi, I.; Delavar, M.; Mirzaei, F.; Nadjar, A.B. Integrating artificial neural network and imperialist competitive algorithm (ICA), to predict the energy consumption for land leveling. Int. J. Energy Sect. Manag. 2017, 11, 522–540. [Google Scholar] [CrossRef]
- Tu, Z.; Cao, J.; Alsaedi, A.; Hayat, T. Global dissipativity analysis for delayed quaternion-valued neural networks. Neural Netw. 2017, 89, 97–104. [Google Scholar] [CrossRef] [PubMed]
- Gonzalez-de-Soto, M.; Emmi, L.; Perez-Ruiz, M.; Aguera, J.; Gonzalez-de-Santos, P. Autonomous systems for precise spraying–Evaluation of a robotised patch sprayer. Biosyst. Eng. 2016, 146, 165–182. [Google Scholar] [CrossRef]
- Acharya, U.R.; Oh, S.L.; Hagiwara, Y.; Tan, J.H.; Adeli, H. Deep convolutional neural network for the automated detection and diagnosis of seizure using EEG signals. Comput. Biol. Med. 2018, 100, 270–278. [Google Scholar] [CrossRef] [PubMed]
- Zhu, H.; Salyani, M.; Fox, R.D. A portable scanning system for evaluation of spray deposit distribution. Comput. Electron. Agric. 2011, 76, 38–43. [Google Scholar] [CrossRef]
- Salyani, M.; Fox, R.D. Performance of Image Analysis for Assessment of Simulated Spray Droplet Distribution. Trans. Asae. 1994, 37, 1083–1089. [Google Scholar] [CrossRef]
- Gil, E.; Llorens, J.; Llop, J.; Fabregas, X.; Gallart, M. Use of a terrestrial LIDAR sensor for drift detection in vineyard spraying. Sensors 2013, 13, 516–534. [Google Scholar] [CrossRef] [PubMed]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Passos, A.T.; Pereyra, G.; Hinton, G.; Dahl, G.; Ormandi, R.; Anil, R. Large scale distributed neural network training through online distillation. arXiv, 2018; arXiv:1804.03235. [Google Scholar]
- Zhang, D.; Liu, J.; Jiang, C.; Liu, A.; Xia, B. Quantitative detection of formaldehyde and ammonia gas via metal oxide-modified graphene-based sensor array combining with neural network model. Sens. Actuators B Chem. 2017, 240, 55–65. [Google Scholar] [CrossRef]
- Izadifar, Z. Modeling and Analysis of Actual Evapotranspiration Using Data Driven and Wavelet Techniques. Doctoral Dissertation, University of Saskatchewan, Saskatoon, SK, Canada, 2010. [Google Scholar]
- Al-Ghobari, H.M.; El-Marazky, M.S.; Dewidar, A.Z.; Mattar, M.A. Prediction of wind drift and evaporation losses from sprinkler irrigation using neural network and multiple regression techniques. Agric. Water Manag. 2018, 195, 211–221. [Google Scholar] [CrossRef]
- Yassin, M.A.; Alazba, A.A.; Mattar, M.A. Artificial neural networks versus gene expression programming for estimating reference evapotranspiration in arid climate. Agric. Water Manag. 2016, 163, 110–124. [Google Scholar] [CrossRef]
- Vinyals, O.; Toshev, A.; Bengio, S.; Erhan, D. Show and tell: A neural image caption generator. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3156–3164. [Google Scholar]
- Zhang, Y.; Li, W.; Yi, C.; Chen, K. A weights-directly-determined simple neural network for nonlinear system identification. In Proceedings of the IEEE 2008 IEEE International Conference on Fuzzy Systems (IEEE World Congress on Computational Intelligence), Hong Kong, China, 1–6 June 2008; pp. 455–460. [Google Scholar]
- Lin, Y.C.; Chen, D.D.; Chen, M.S.; Chen, X.M.; Li, J. A precise BP neural network-based online model predictive control strategy for die forging hydraulic press machine. Neural Comput. Appl. 2018, 29, 585–596. [Google Scholar] [CrossRef]
- Zendehboudi, A.; Baseer, M.A.; Saidur, R. Application of support vector machine models for forecasting solar and wind energy resources: A review. J. Clean. Prod. 2018, 199, 272–285. [Google Scholar] [CrossRef]
- Deng, X.; Xu, T.; Wang, R. Risk Evaluation Model of Highway Tunnel Portal Construction Based on BP Fuzzy Neural Network. Comput. Intell. Neurosci. 2018, 2018, 8547313. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y. Study on Decision-Making Model of Bid Evaluation for Engineering Projects Based on BP Neural Network and Order Relation Analysis. Open Autom. Control Syst. J. 2015, 7, 591–598. [Google Scholar] [CrossRef]
- Wen, S.; Zhang, Q.Y.; Deng, J.Z.; Lan, Y.B.; Yin, X.C.; Shan, J. Design and Experiment of a Variable Spray System for Unmanned Aerial Vehicles Based on PID and PWM Control. Appl. Sci. 2018, 8, 2482. [Google Scholar] [CrossRef]
- Chen, Z.G.; Chen, M.X.; Wei, X.H.; Li, J.Y.; Li, L. Variable prescription pesticide spraying system for farmland based on the Beidou Navigation Satellite system. J. Drain. Irrig. Mach. Eng. 2015, 33, 965–970. [Google Scholar]
- Kesterson, M.A.; Luck, J.D.; Sama, M.P. Development and preliminary evaluation of a spray deposition sensing system for improving pesticide application. Sensors 2015, 15, 31965–31972. [Google Scholar] [CrossRef] [PubMed]
- MH/T Standards 1002.1-2016: Quality Indexes of Agricultural Aviation Operation-Part 1: Spraying Operation; China Civil Aviation Administration: Beijing, China, 2016; Volume 5.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm 1: The back propagation neural network |
| Definition: Input layer neurons xi; The number of input layer neurons n; The hidden layer neurons Hj, H′j and H″j; The number of input layer neurons k; The output layer neurons y Deposition Initialization: |
| Initialize all weights and biases in network; for i=1 to n do Create hierarchy model and assign to neurons x8=(fs, fh, p, ns, t, h, ws, v); y=(d) xi = X(xi) end |
| forj=1 tokdo fort=1 to 3 do Hj←ΣWijxi+bj H′j←ΣW’ijHj+b’j H″j←ΣW″ijH′j+b″j yo←g(H″j) end end for all j in k do E←1/2Σej2 |
| if (E ∉ Error) do Wij←Wij+αHjej bj←bj+βej return i=1 |
| else y=yo |
| End |
| Parameters | Max | Min | Mean | Std.Dev | Skewness | Kurtosis |
|---|---|---|---|---|---|---|
| Flight speed (m/s) | 5.22 | 1.00 | 3.010 | 0.9847 | 0.37 | −0.33 |
| Flight altitude (m) | 4.08 | 1.45 | 1.920 | 0.691 | 0.83 | 0.91 |
| Temperature (°C) | 32.00 | 25.00 | 28.770 | 1.750 | −0.92 | −0.26 |
| Humidity | 0.741 | 0.45 | 0.643 | 0.083 | −0.82 | −0.72 |
| Propeller pitch (m) | 1.40 | 1.20 | 1.310 | 0.099 | −0.20 | −1.98 |
| Nozzle pitch (m) | 0.55 | 0.45 | 0.513 | 0.038 | −0.47 | −1.14 |
| Wind speed (m/s) | 3.20 | 0.01 | 1.144 | 0.585 | 0.76 | 0.88 |
| Prescription (L/hm2) | 48.00 | 5.00 | 20.50 | 9.548 | 0.12 | −0.96 |
| Deposition (μL/cm2) | 8.86 | 0.01 | 5.69 | 15.72 | 4.36 | 20.27 |
| Number of Hidden Layer Neurons | Statistical Parameters | |||
|---|---|---|---|---|
| r | RMSE (%) | OI | MAE (%) | |
| 12 | 0.864 | 4.673 | 0.933 | 3.008 |
| 14 | 0.907 | 4.651 | 0.936 | 3.270 |
| 16 | 0.953 | 4.643 | 0.942 | 3.445 |
| 18 | 0.980 | 4.321 | 0.946 | 3.507 |
| 20 | 0.991 | 4.215 | 0.951 | 3.549 |
| 22 | 0.976 | 4.185 | 0.949 | 3.498 |
| 24 | 0.952 | 4.137 | 0.945 | 3.452 |
| Band | Temperature (°C) | Humidity | Speed (m·s−1) | Height (m) | Wind Speed (m·s−1) | Predicted Deposition (μL·cm−2) | Experimental Deposition (μL·cm−2) | Deviation (%) |
|---|---|---|---|---|---|---|---|---|
| F1-2 | 20.65 | 72.9% | 2.07 | 1.94 | 0.25 | 0.3058 | 0.317 | 3.66 |
| F1-5 | 20.65 | 72.9% | 2.26 | 2.13 | 0.23 | 1.1284 | 0.974 | 13.68 |
| F1-8 | 20.65 | 72.8% | 2.45 | 2.15 | 0.17 | 0.6291 | 0.613 | 2.56 |
| F1-11 | 20.65 | 72.8% | 2.89 | 2.21 | 0.21 | 1.5137 | 1.396 | 7.78 |
| F1-14 | 20.65 | 72.8% | 2.25 | 2.17 | 0.23 | 1.2231 | 1.258 | 2.85 |
| F1-17 | 20.65 | 72.8% | 2.31 | 2.05 | 0.19 | 0.6145 | 0.636 | 3.50 |
| F1-20 | 20.65 | 72.8% | 2.46 | 2.12 | 0.21 | 0.9473 | 0.886 | 6.47 |
| F1-23 | 20.65 | 72.8% | 2.43 | 2.14 | 0.20 | 1.5348 | 1.756 | 14.41 |
| F2-2 | 21.91 | 68.6% | 3.16 | 2.06 | 1.08 | 1.3961 | 1.265 | 9.39 |
| F2-5 | 21.91 | 68.6% | 3.25 | 2.27 | 0.98 | 1.6087 | 1.476 | 8.25 |
| F2-8 | 21.91 | 68.6% | 3.30 | 2.24 | 0.67 | 0.2973 | 0.324 | 8.98 |
| F2-11 | 21.91 | 68.6% | 3.35 | 2.35 | 0.84 | 0.6239 | 0.662 | 6.11 |
| F2-14 | 21.91 | 68.6% | 3.41 | 1.94 | 1.05 | 0.8953 | 0.876 | 2.16 |
| F2-17 | 21.91 | 68.6% | 3.75 | 1.68 | 1.14 | 0.3769 | 0.313 | 16.95 |
| F2-20 | 21.91 | 68.6% | 3.70 | 1.75 | 1.32 | 1.6481 | 1.849 | 12.19 |
| F2-23 | 21.91 | 68.6% | 3.59 | 1.45 | 1.09 | 1.5649 | 1.307 | 16.48 |
| Unit | Prescription Value (L·hm−2) | Band | Deposition (μL·cm−2) | Coefficient of Variation |
|---|---|---|---|---|
| 1 | 15 | F1-2(Centerline) | 0.347 | 9.46% |
| F1-3 | 0.317 | |||
| 2 | 45 | F1-4 | 0.821 | 8.04% |
| F1-5(Centerline) | 0.887 | |||
| 1.24% | ||||
| F1-6 | 0.876 | |||
| 3 | 30 | F1-7 | 0.742 | 9.03% |
| F1-8(Centerline) | 0.675 | |||
| 2.37% | ||||
| F1-9 | 0.691 | |||
| 4 | 75 | F1-10 | 1.705 | 3.11% |
| F1-11(Centerline) | 1.758 | |||
| 1.54% | ||||
| F1-12 | 1.731 | |||
| 5 | 60 | F1-13 | 1.235 | 2.43% |
| F1-14(Centerline) | 1.265 | |||
| 3.32% | ||||
| F1-15 | 1.307 | |||
| 6 | 30 | F1-16 | 0.759 | 4.08% |
| F1-17(Centerline) | 0.728 | |||
| 1.92% | ||||
| F1-18 | 0.714 | |||
| 7 | 45 | F1-19 | 0.975 | 2.97% |
| F1-20(Centerline) | 1.004 | |||
| 1.69% | ||||
| F1-21 | 0.987 | |||
| 8 | 75 | F1-22 | 1.762 | 2.10% |
| F1-23(Centerline) | 1.725 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, S.; Zhang, Q.; Yin, X.; Lan, Y.; Zhang, J.; Ge, Y. Design of Plant Protection UAV Variable Spray System Based on Neural Networks. Sensors 2019, 19, 1112. https://doi.org/10.3390/s19051112
Wen S, Zhang Q, Yin X, Lan Y, Zhang J, Ge Y. Design of Plant Protection UAV Variable Spray System Based on Neural Networks. Sensors. 2019; 19(5):1112. https://doi.org/10.3390/s19051112
Chicago/Turabian StyleWen, Sheng, Quanyong Zhang, Xuanchun Yin, Yubin Lan, Jiantao Zhang, and Yufeng Ge. 2019. "Design of Plant Protection UAV Variable Spray System Based on Neural Networks" Sensors 19, no. 5: 1112. https://doi.org/10.3390/s19051112
APA StyleWen, S., Zhang, Q., Yin, X., Lan, Y., Zhang, J., & Ge, Y. (2019). Design of Plant Protection UAV Variable Spray System Based on Neural Networks. Sensors, 19(5), 1112. https://doi.org/10.3390/s19051112