In this section, communication results of one actuator transmitting one data stream are presented first. These will serve as benchmarks. Then, we present the communication results of two actuators transmit ting two data streams simultaneously in order to double the transmission rate over the same bandwidth.
4.1. One Actuator Transmitting One Data Stream
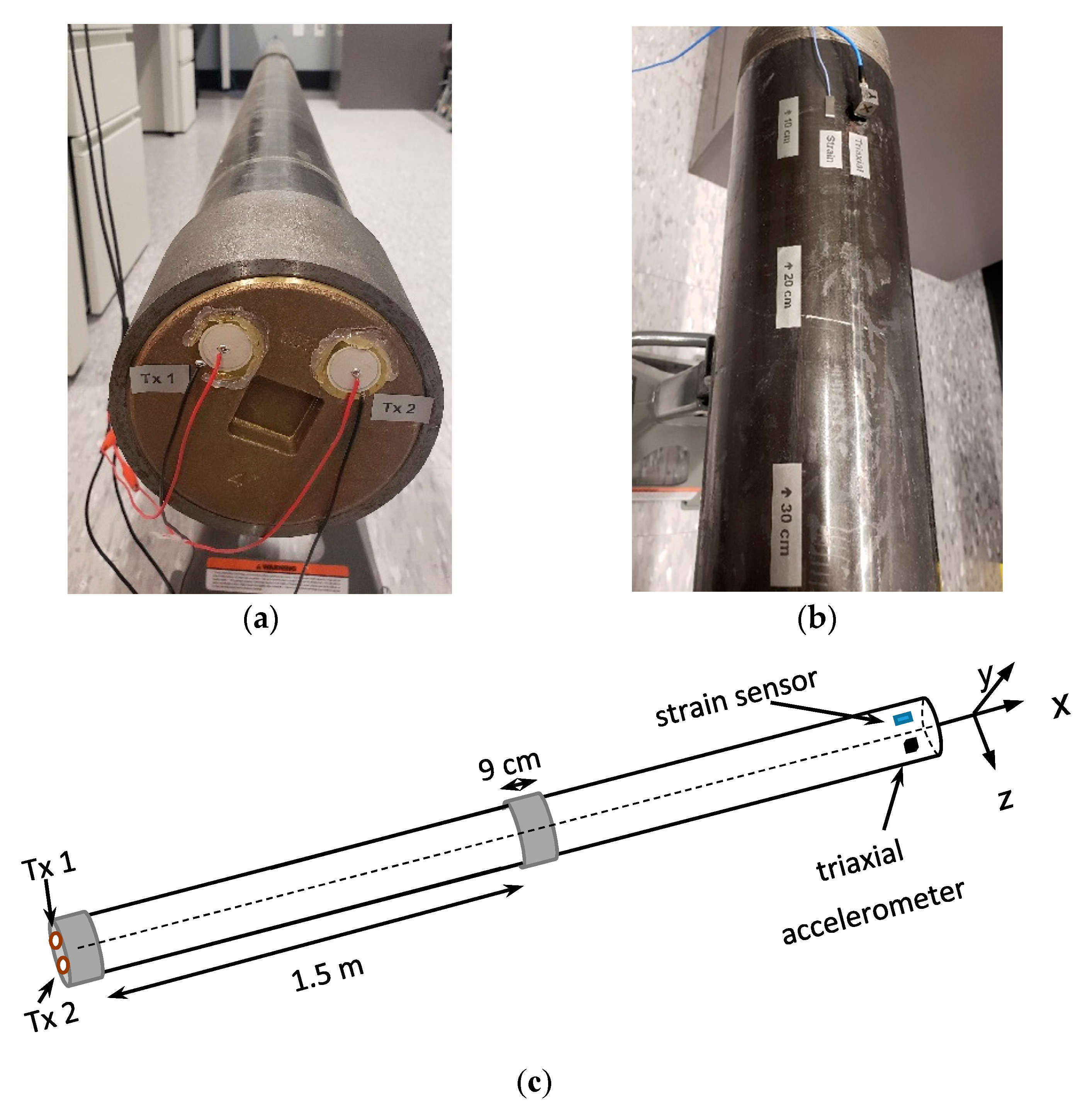
In this section, we consider the experiments where Tx 1 in
Figure 1a transmitted fifty OFDM symbols in a row over the bandwidth of 2–6 kHz, repeated five times in order to have multiple trials. With the same transmit power per actuator throughout the entire paper and in all of the experiments, the measured bit error rates (BERs)—that is, bit error probabilities—for various receiving sensors at different positions identified in
Figure 1b are presented in
Figure 4. For each sensor at each position, five BERs and their average are provided, as obtained from five trials. It was observed that quite often the BERs of the strain sensor receiver were smaller than the BERs of the accelerometer receivers.
The signal-to-noise ratio (SNR) for each BER data point of
Figure 4 and their average over five trials are provided in
Figure 5. The SNRs reported throughout this paper were obtained by calculating the ratio of the power of pilot sub-carriers to the power of null sub-carriers [
7]. In most cases, the SNRs of the strain sensor receiver were observed to be smaller than SNRs of the accelerometer receivers. This can be attributed to the sensitivity of the particular strain sensor used in the experiments, which produced weaker signals compared to the accelerometer signals, as discussed in the previous section.
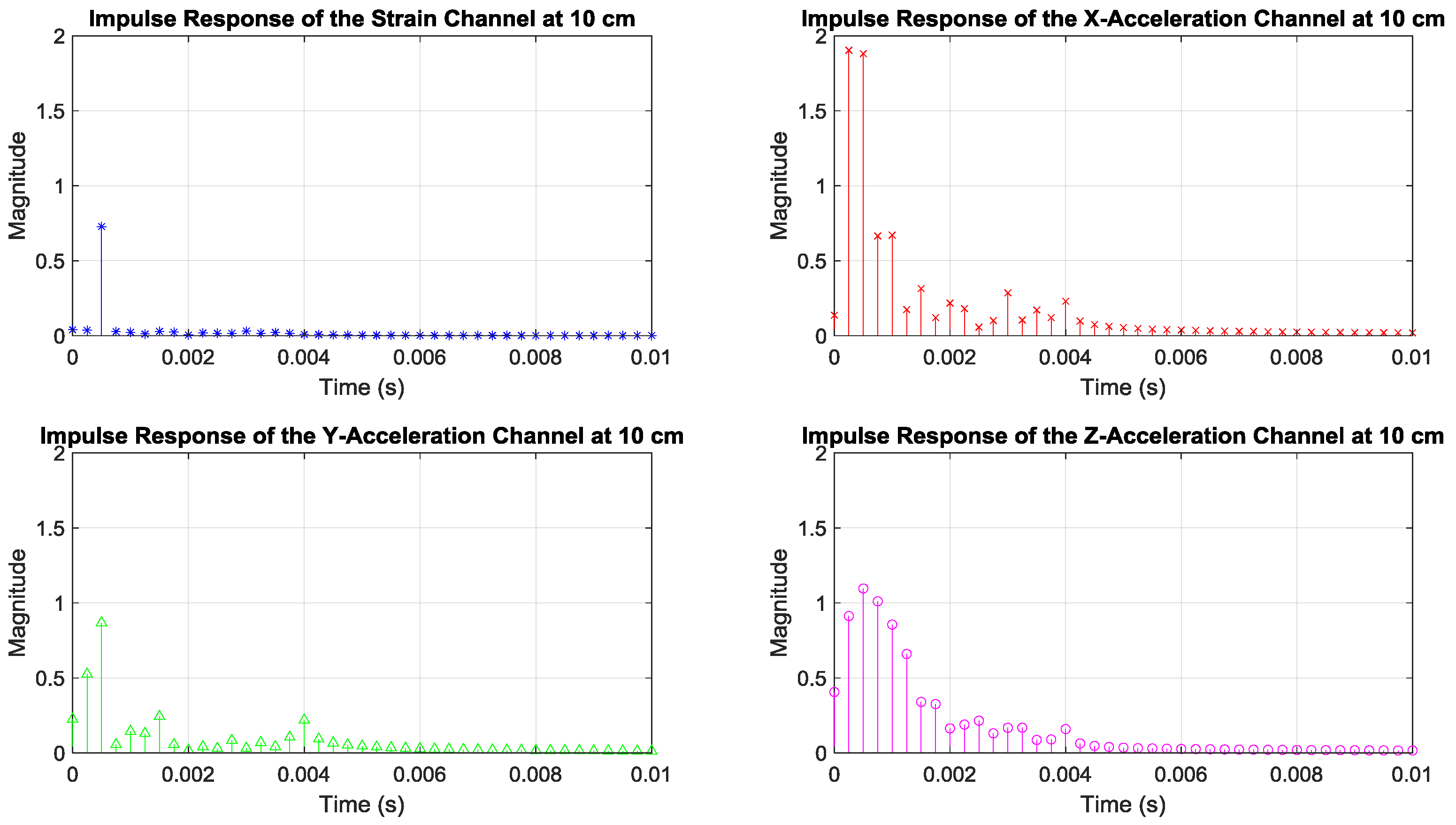
The smaller BERs of the strain sensor receiver, while having smaller SNRs, can be related to the relatively flat strain channel frequency response in
Figure 2. This makes equalization and data detection simpler and more accurate, compared to the non-flat and frequency-selective behavior of the acceleration channels’ frequency responses in
Figure 2.
To better understand the data presented in
Figure 4 and
Figure 5, their measurement results averaged over five different receiver positions are listed in
Table 1. It was observed that the BER of the strain sensor receiver was smaller than the BERs of the accelerometer receivers. This can be attributed to the relatively flat strain channel frequency response in
Figure 2, which rendered equalization and data detection more accurate than the frequency-selective and non-flat acceleration channels’ frequency responses in
Figure 2. The smaller SNR of the strain sensor receiver can be related to the sensitivity of the specific strain sensor used in the experiments, which produced weaker signals than the accelerometer signals, as mentioned in
Section 3.
4.2. Two Actuators Simultaneously Transmitting Two Data Streams
Here we consider the experiments where Tx 1 and Tx 2 in
Figure 1a both transmitted two different sets of data simultaneously and with the same power over the same bandwidth of 2 to 6 kHz. More specifically, each actuator transmitted fifty OFDM symbols in a row, repeated five times in order to have multiple trials. This simultaneous transmission of two data streams doubled the transmission rate, without any bandwidth increase. To separate and demodulate the two data streams at the receive side, two receiving sensors were used in this paper: the strain sensor and the triaxial accelerometer. Since the latter had the three
x,
y, and
z acceleration channels, there were six possible receiver configurations using two channels: strain and
x-acceleration, strain and
y-acceleration, strain and
z-acceleration,
x-acceleration and
y-acceleration,
x-acceleration and
z-acceleration, and
y-acceleration and
z-acceleration. Details of the data separation and detection method are discussed in the
Appendix A. Measured BERs and SNRs for these six receivers at different positions identified in
Figure 1b are presented in
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10 and
Figure 11, respectively. For each receiver at each position, five BERs, five SNRs, and their averages for each of the first and the second data streams are provided, as obtained from five trials.
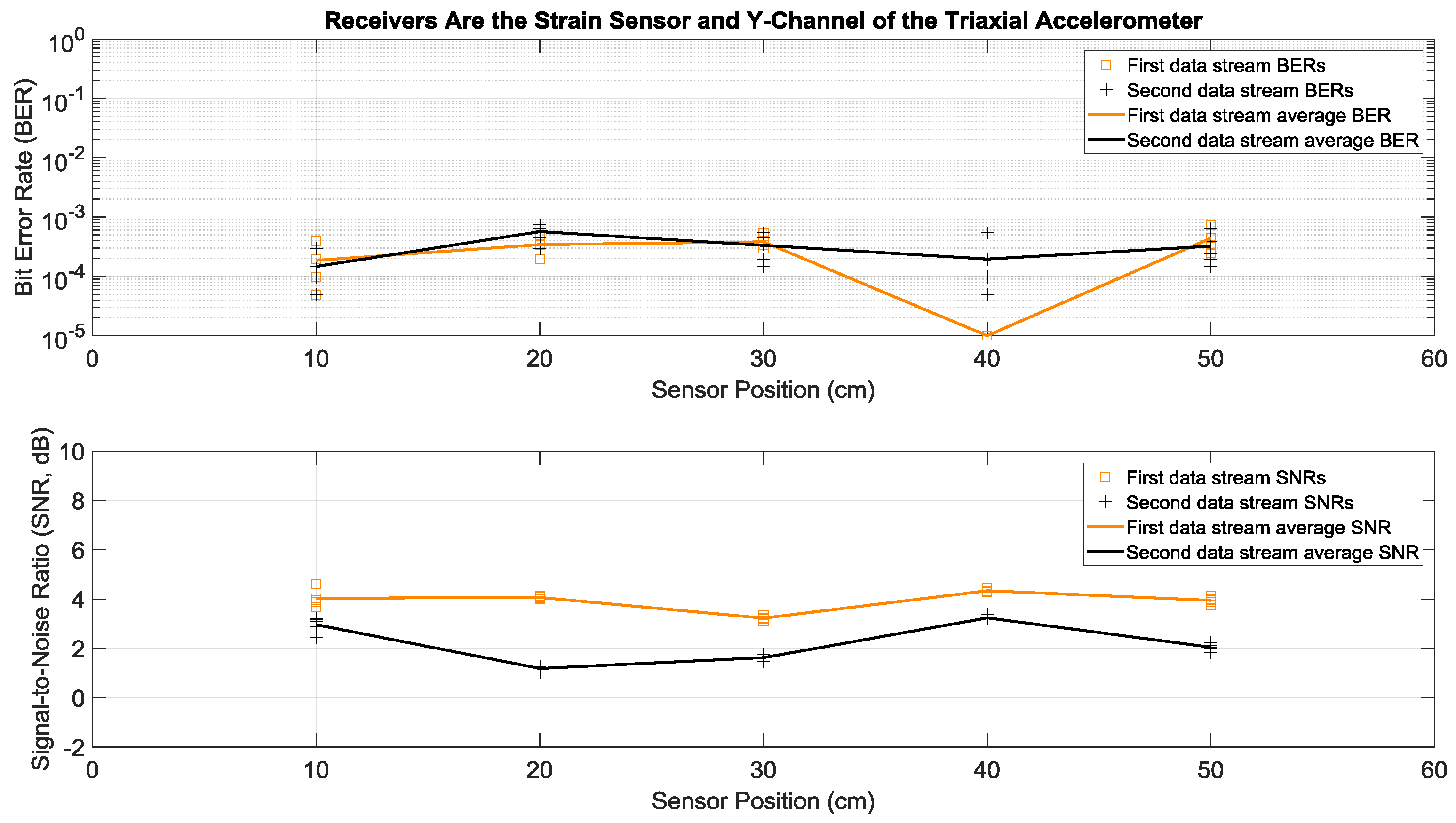
To compare performance of these six 2 × 2 systems with two transmitting actuators and a two-channel receiver, the best performance of the one actuator system of the previous subsection was considered as a benchmark. According to
Figure 4, the lowest average BERs were below 10
−3 for the system with the strain receiver, for average SNRs less than 4 dB at various receiver positions. Based on
Figure 7 and compared to this benchmark, the two-actuator system using the strain and the
y-acceleration receivers offered the best performance among the six two-actuator systems. This is because in all the receiver positions its average BERs were less than 10
−3, with average SNRs close to or less than 4 dB. The second-best two-actuator system appeared to be the one which utilized the strain and the
x-acceleration receivers, whose BERs and SNRs are shown in
Figure 6.
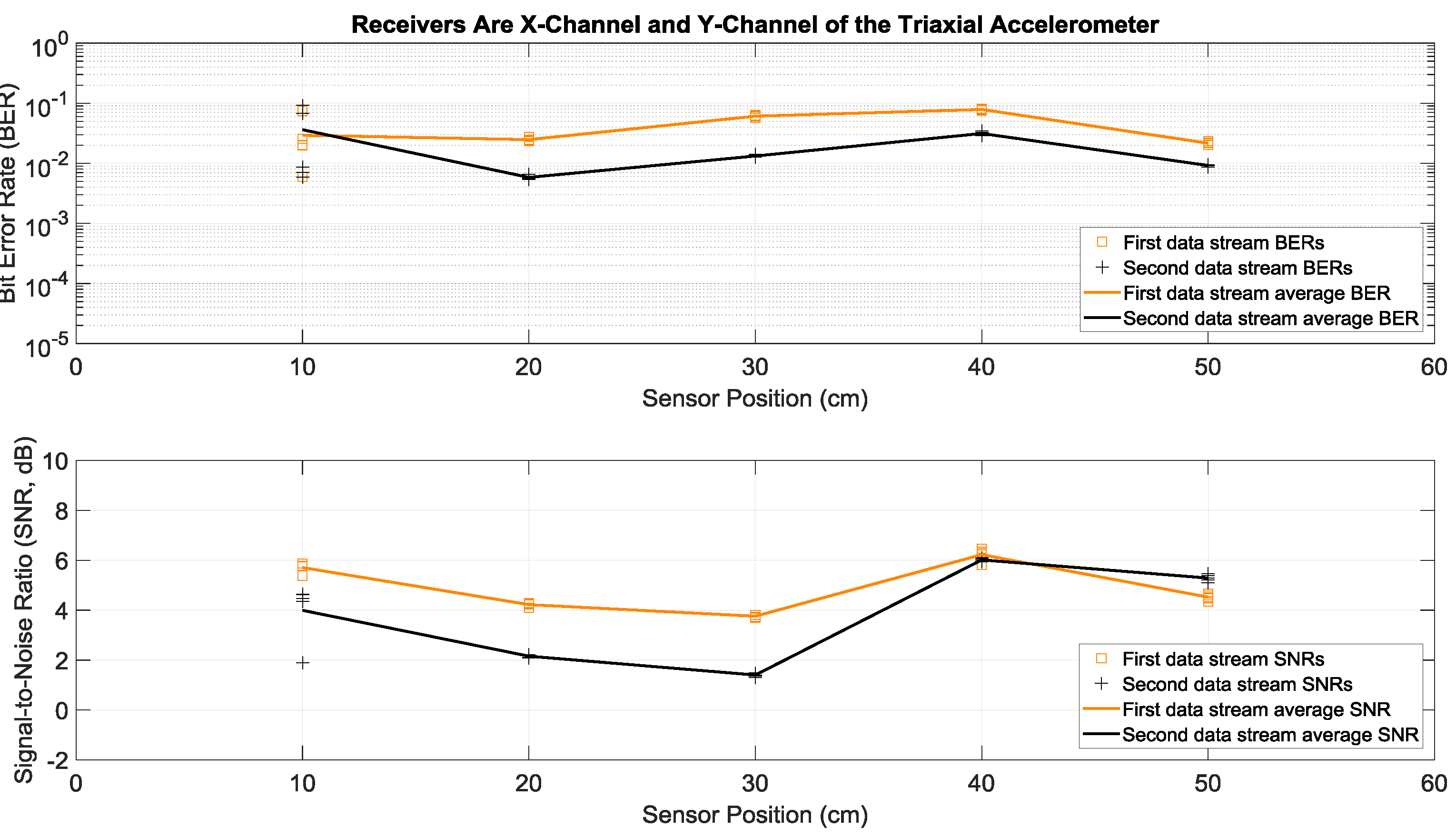
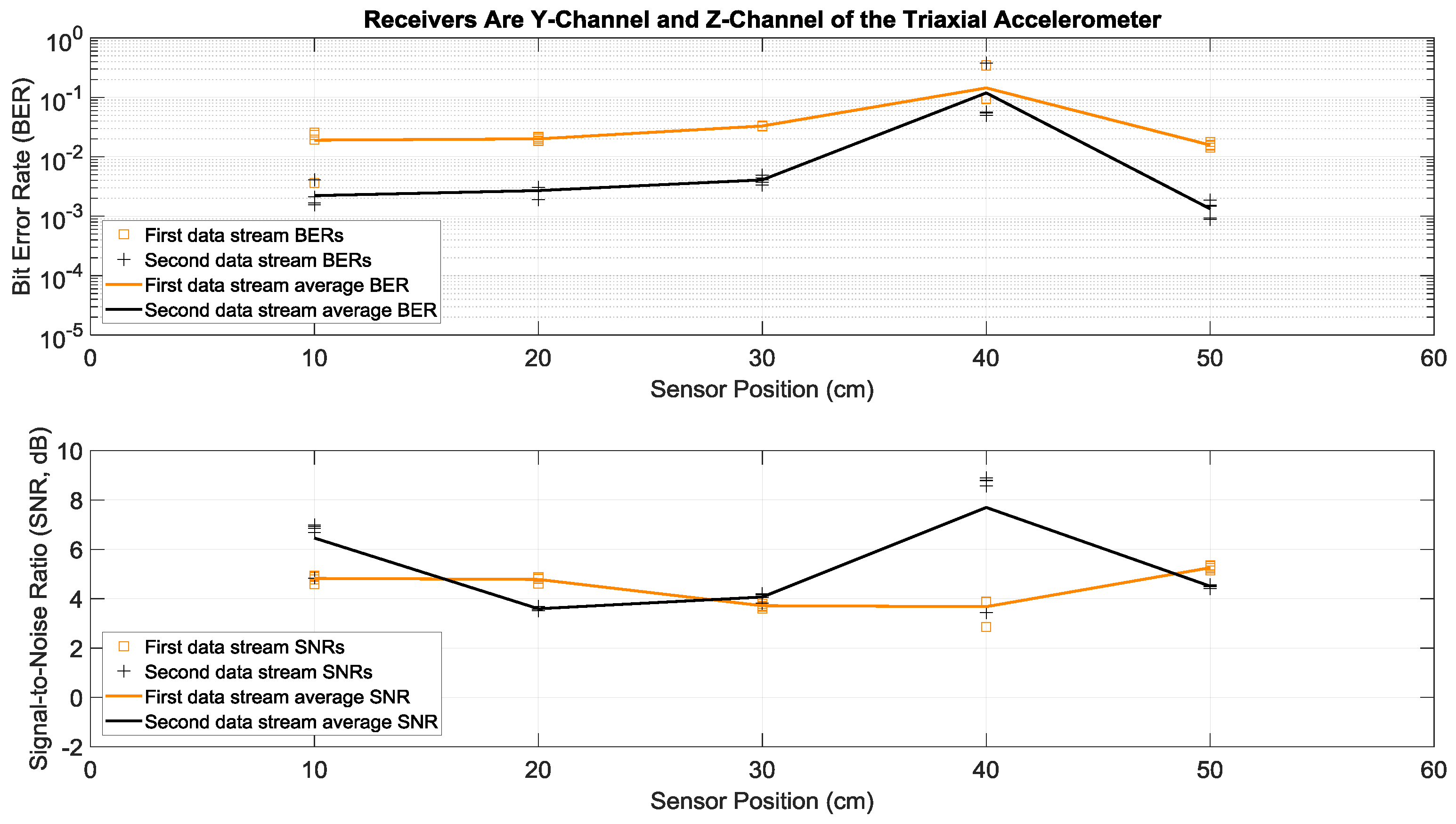
Note that average BERs of the two-actuator systems that did not use the strain sensor receiver were all greater than 10
−3 at all positions, for average SNRs ranging from 1.5 to 9 dB (see
Figure 9,
Figure 10 and
Figure 11). As discussed in the previous section, this can be related to the relatively flat strain channel frequency response, which made equalization and data detection simpler and more accurate compared to the non-flat and frequency-selective behavior of the acceleration channels.
To better comprehend the data presented in
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10 and
Figure 11, their measurement results averaged over five different receiver positions and over two data streams are provided in
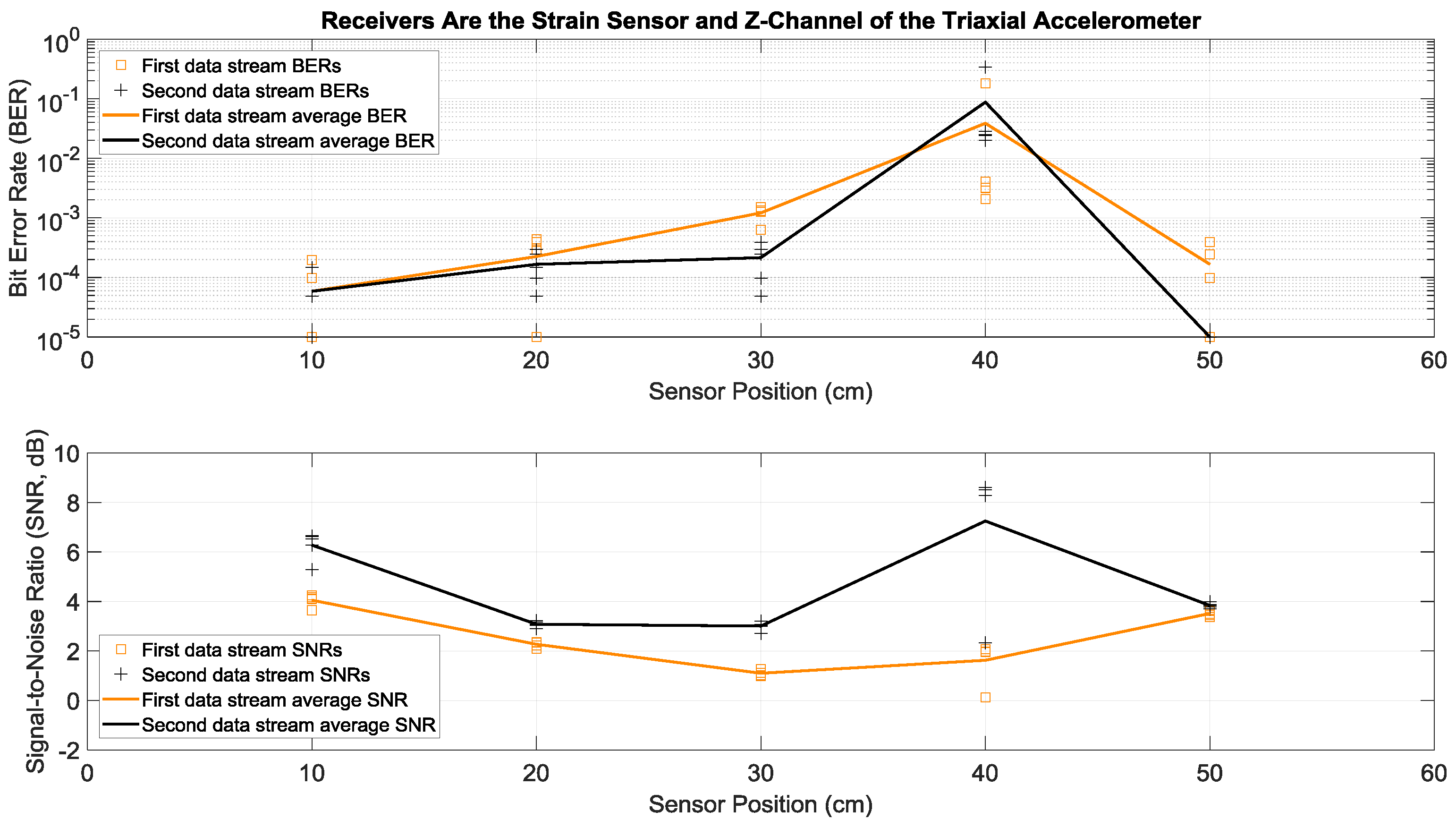
Table 2. It was observed that when the strain sensor was one of the receivers, the BER tended to be smaller. This held true even for strain and
z-acceleration in
Table 2, if the abnormally high BERs in
Figure 8 for this receiver pair at 40 cm were not included in the average, which updated the BER and SNR for this receiver pair in
Table 2 to 2.6 × 10
−4 and 3.4 dB, respectively. Overall, these smaller BERs can be attributed to the relatively flat strain channel frequency response, which made data recovery and equalization simpler and more effective, compared to the acceleration channels which were non-flat and more frequency selective.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}