A Novel Underdetermined Blind Source Separation Method and Its Application to Source Contribution Quantitative Estimation




Abstract
1. Introduction
2. Underdetermined Blind Source Separation
2.1. Basic Theory
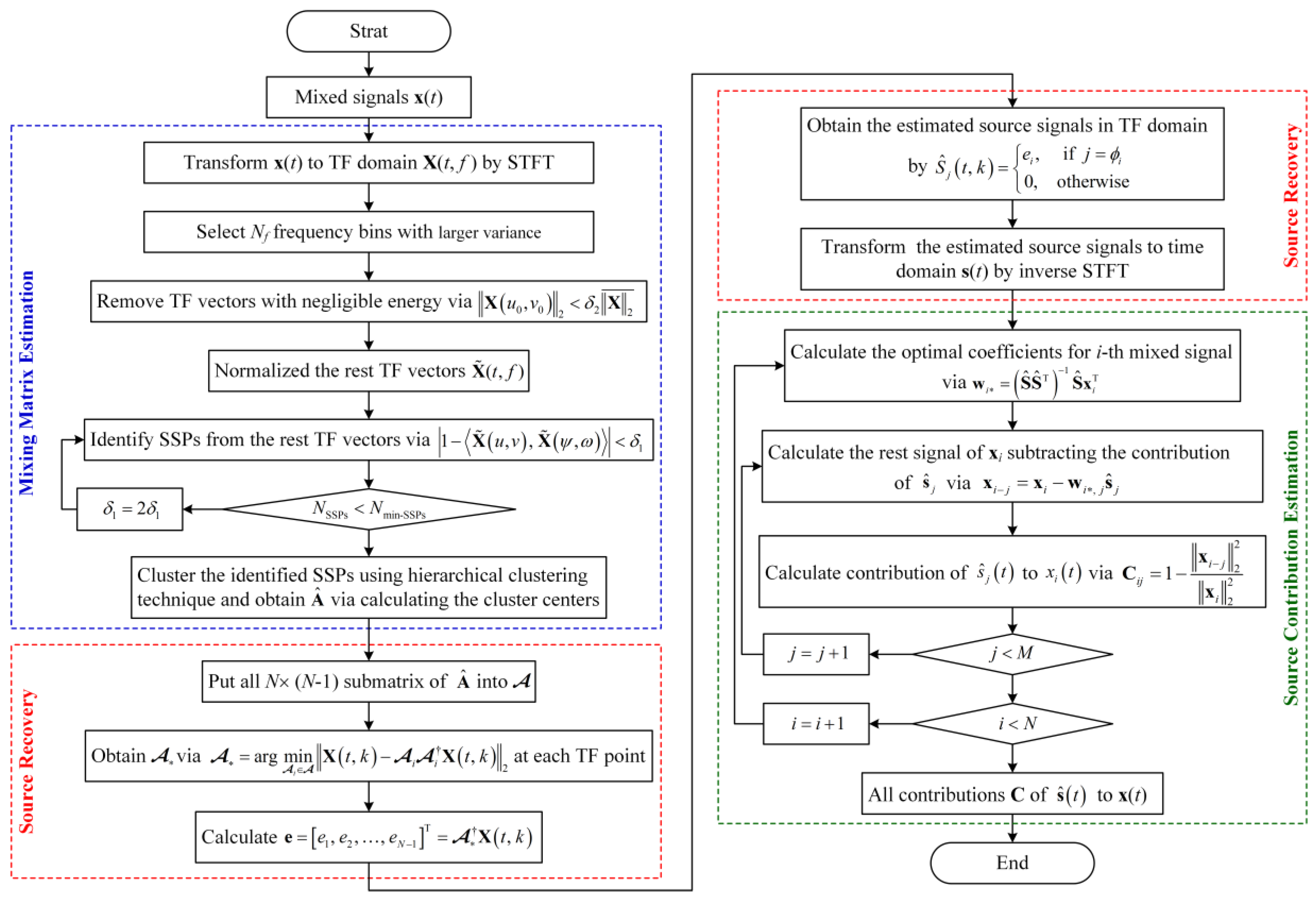
2.2. Proposed Mixing Matrix Estimation Method
2.3. Source Recovery
3. Proposed Source Contribution Estimation Method
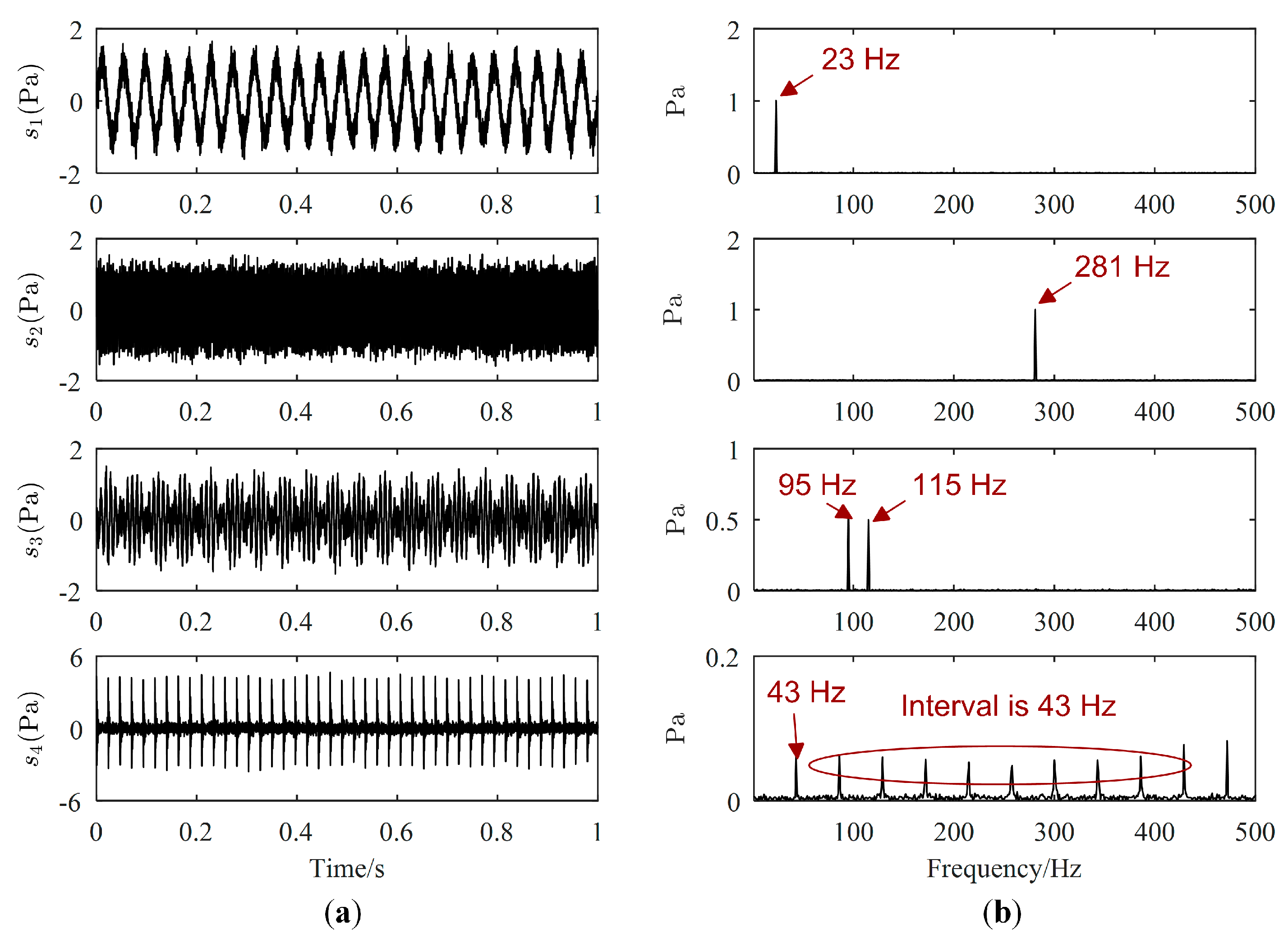
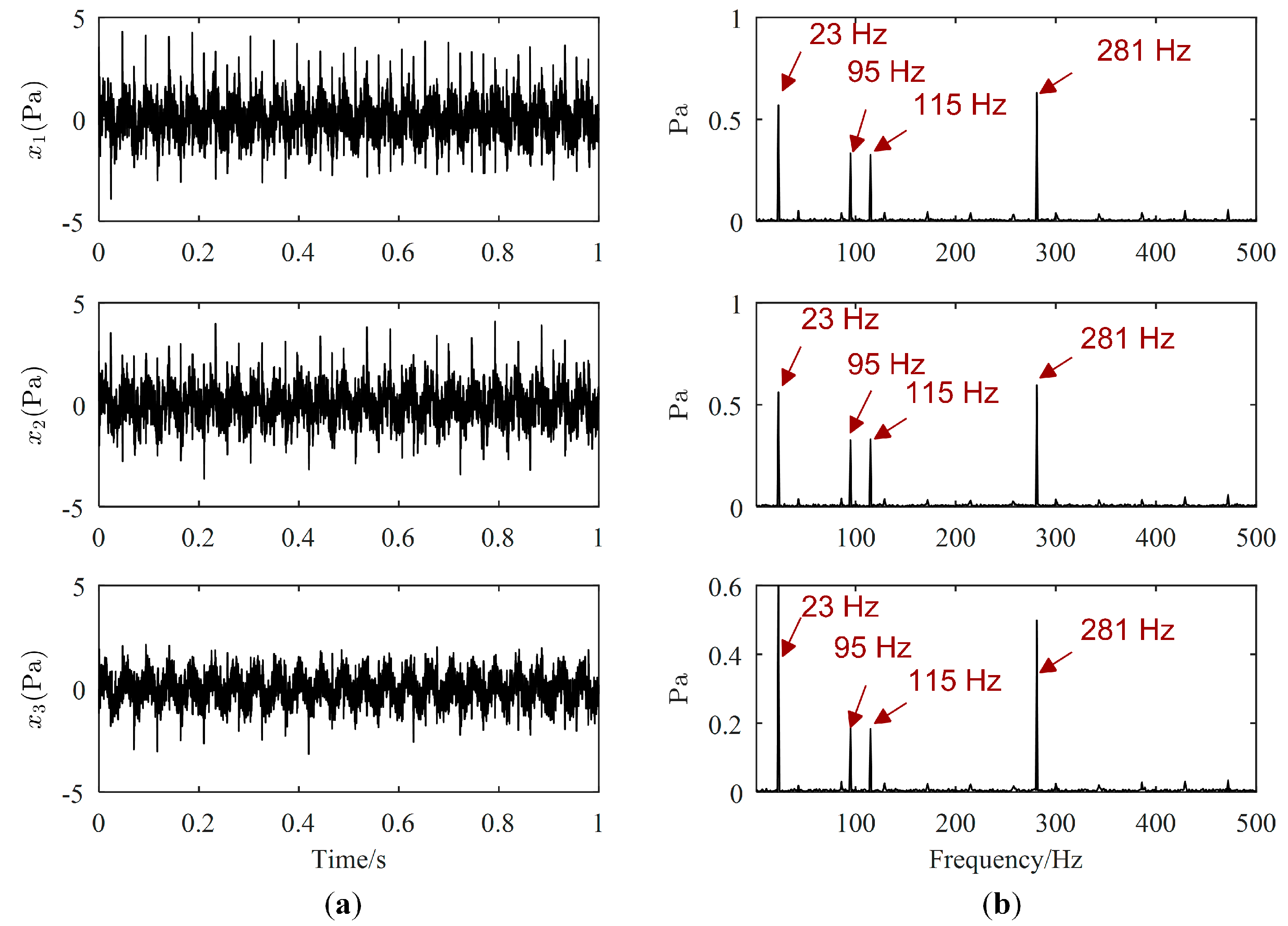
4. Numerical Case Study
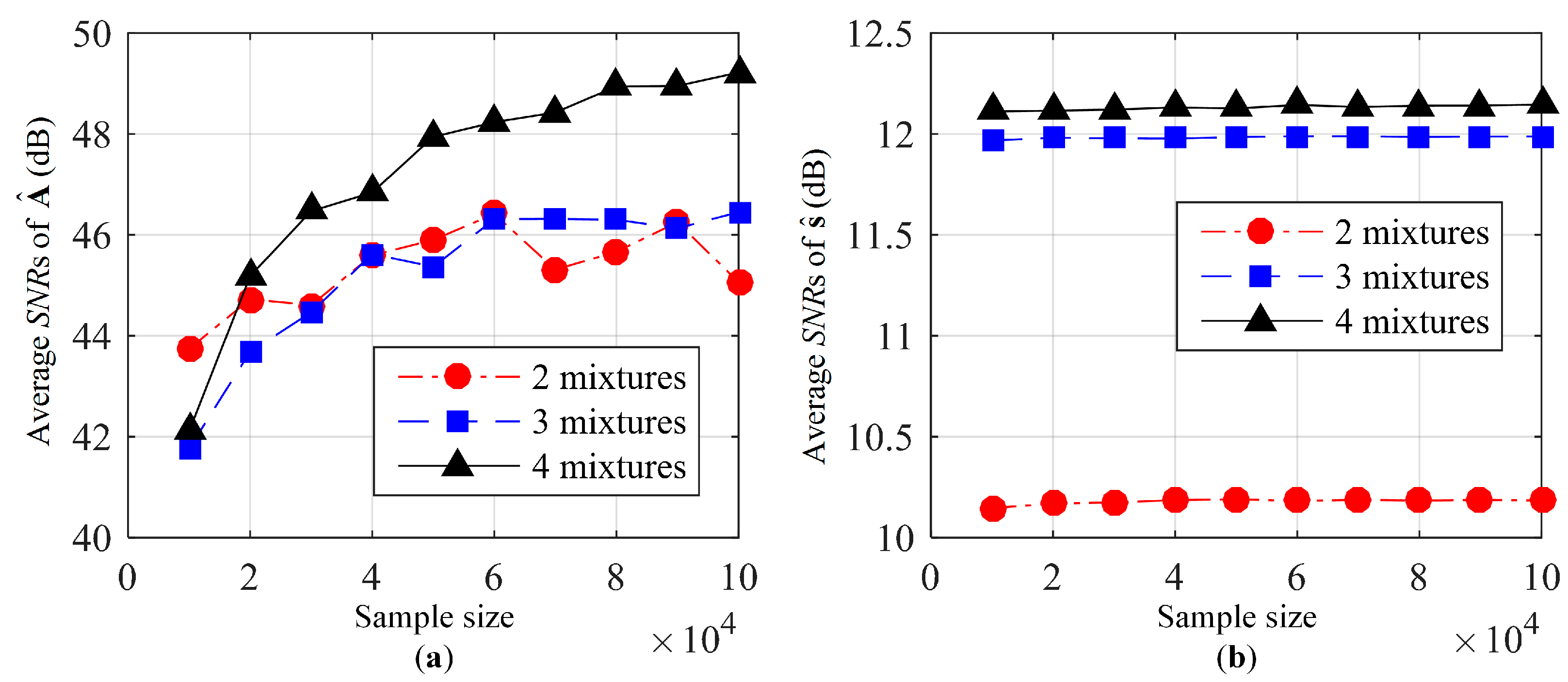
4.1. Performance of the Proposed UBSS Method
4.2. Performance of the Proposed Source Contribution Estimation Method
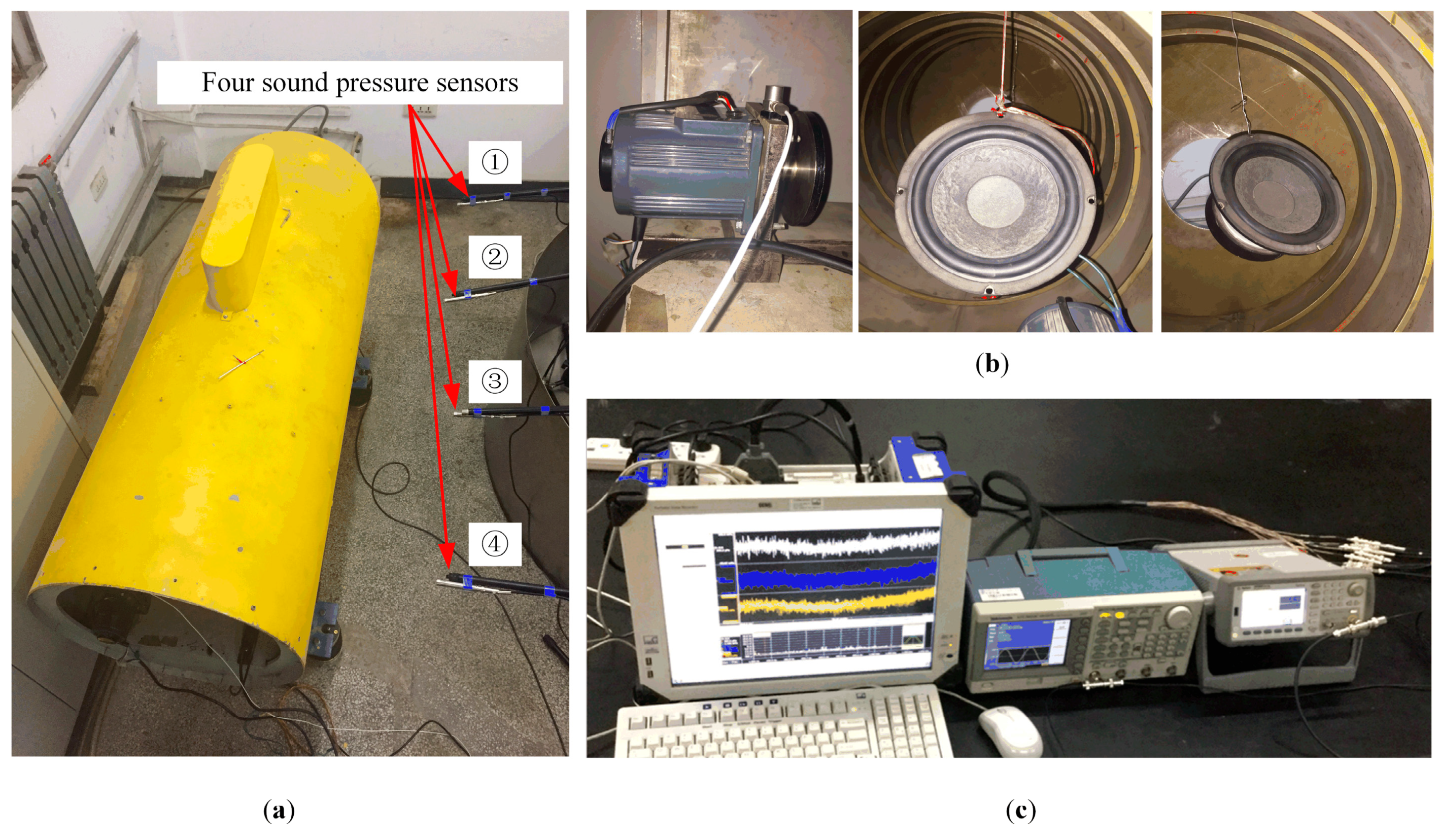
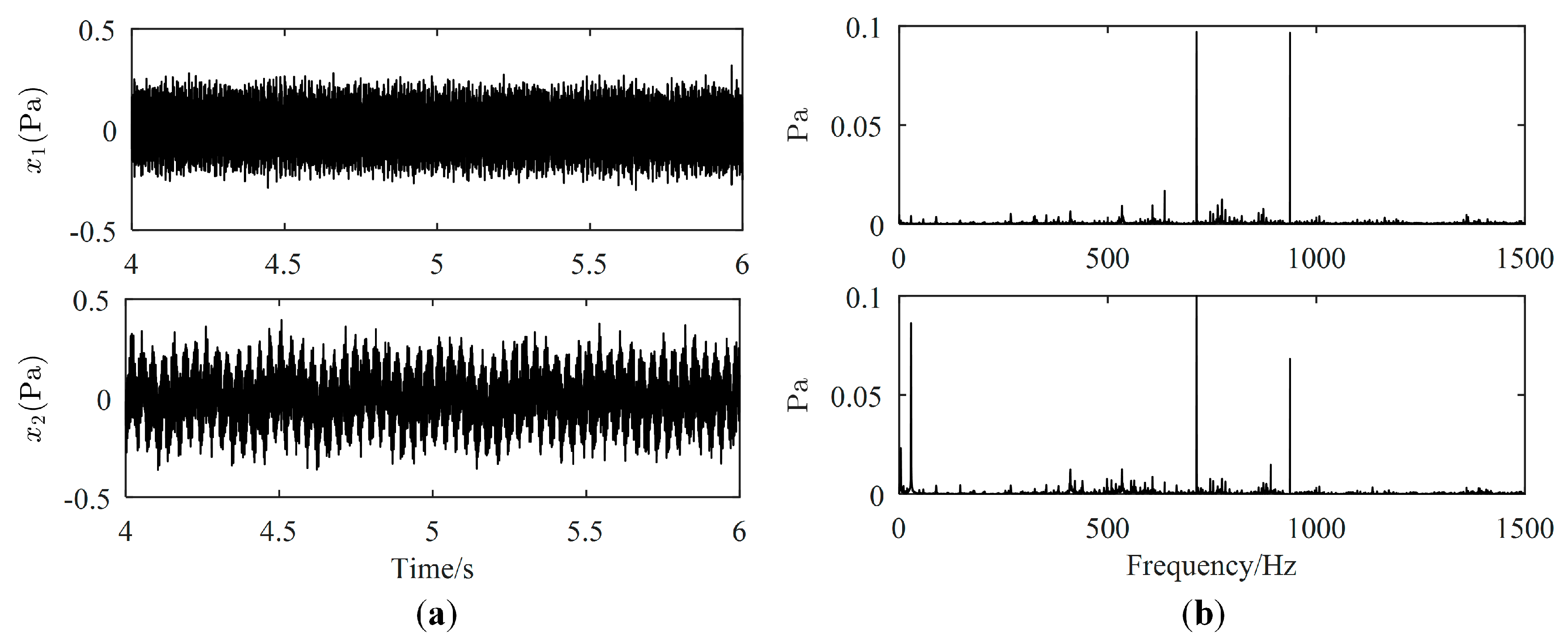
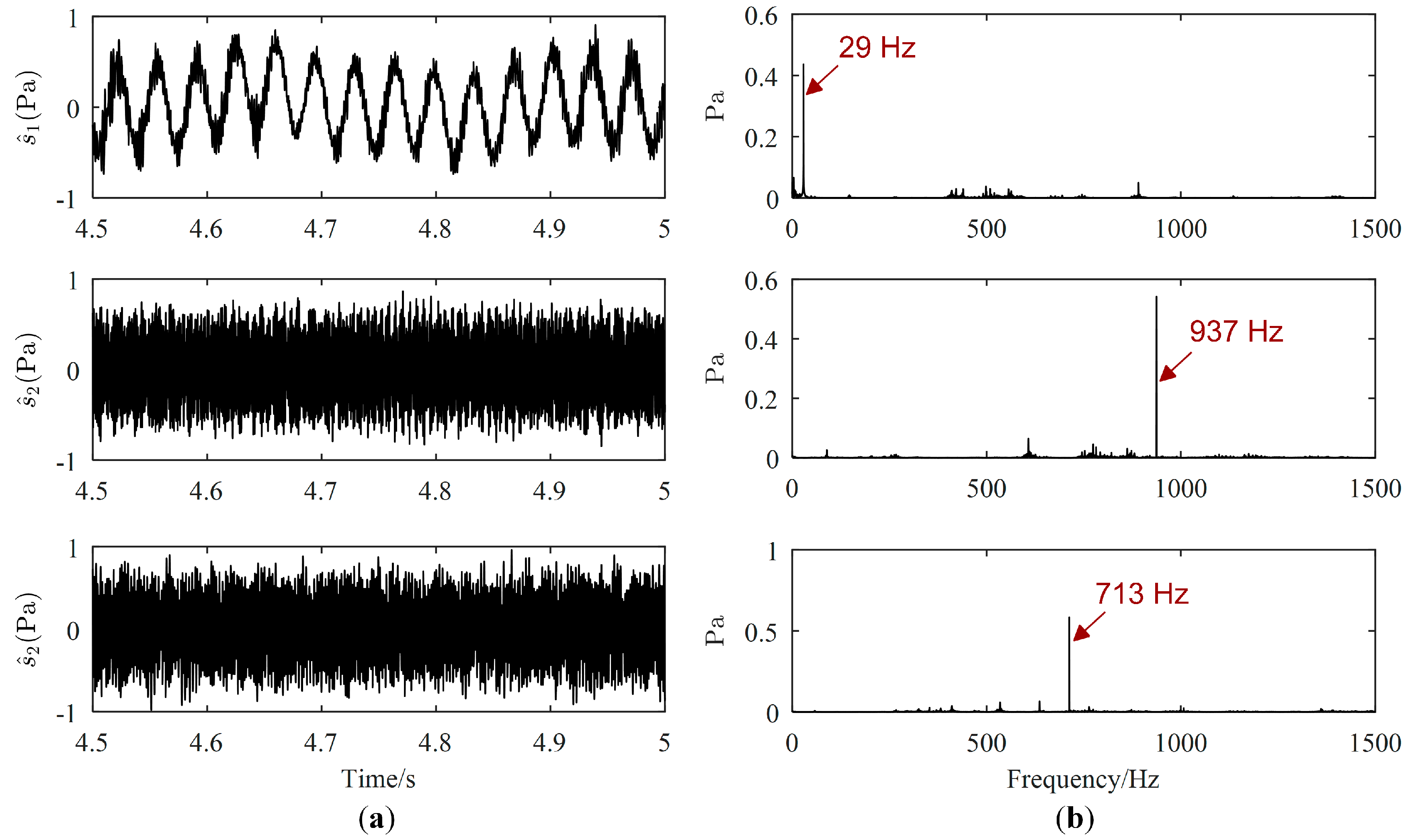
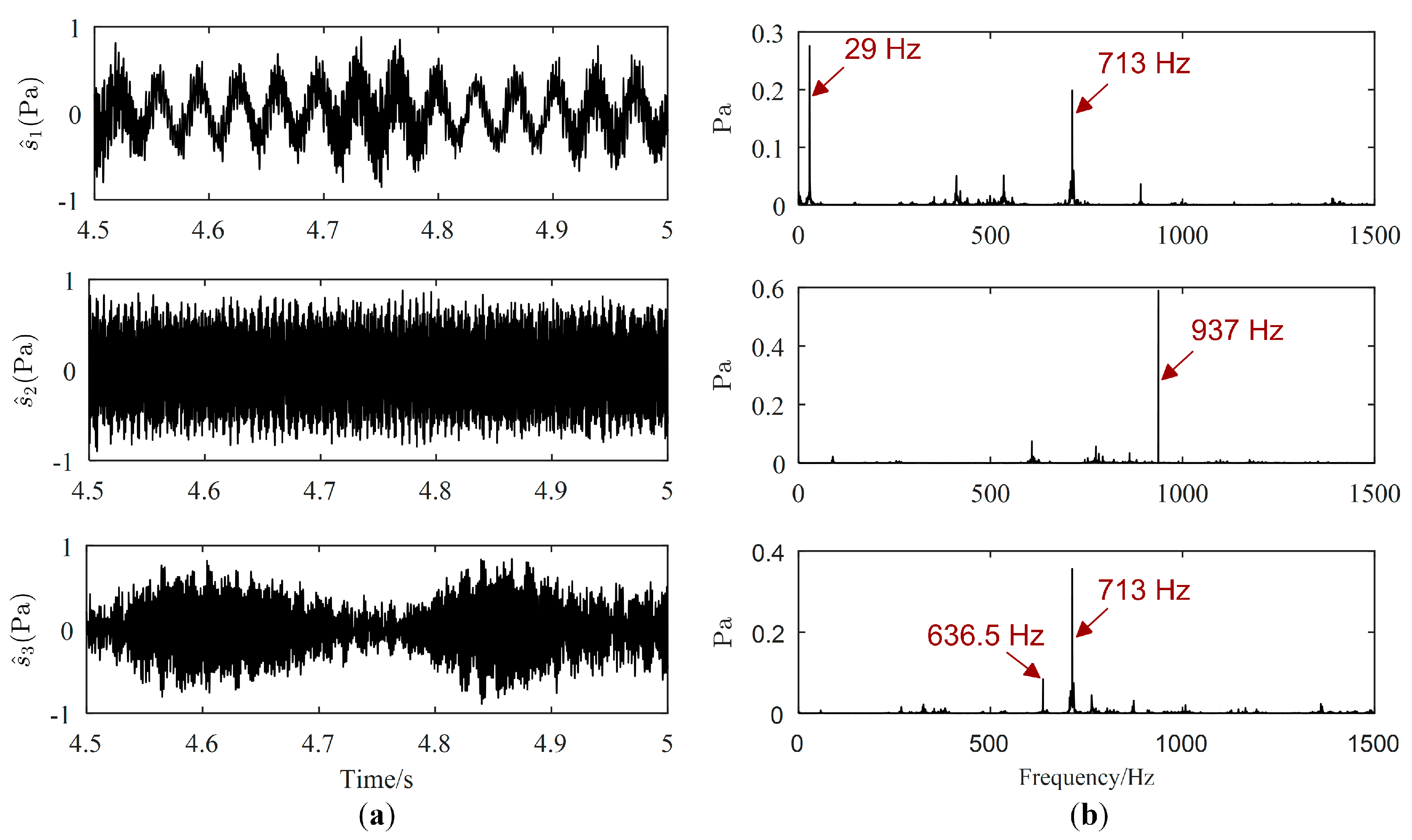
5. Experimental Study with Cylindrical Structure
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhang, J.; Zhang, Z.; Cheng, W.; Li, X.; Chen, B.; Yang, Z.; He, Z. Kurtosis-based constrained independent component analysis and its application on source contribution quantitative estimation. IEEE Trans. Instrum. Meas. 2014, 63, 1842–1854. [Google Scholar] [CrossRef]
- Oudompheng, B.; Nicolas, B.; Lamotte, L. Localization and contribution of underwater acoustical sources of a moving surface ship. IEEE J. Ocean. Eng. 2018, 43, 536–546. [Google Scholar] [CrossRef]
- Cheng, W.; Zhang, Z.; Lee, S.; He, Z. Source contribution evaluation of mechanical vibration signals via enhanced independent component analysis. J. Manuf. Sci. Eng. Trans. ASME 2012, 134, 021014. [Google Scholar] [CrossRef]
- Wolf, G.; Mallat, S.; Shamma, S. Rigid motion model for audio source separation. IEEE Trans. Signal Process. 2016, 64, 1822–1831. [Google Scholar] [CrossRef]
- Naanaa, W.; Nuzillard, J.-M. Extreme direction analysis for blind separation of nonnegative signals. Signal Process. 2017, 130, 254–267. [Google Scholar] [CrossRef]
- Becker, H.; Albera, L.; Comon, P.; Kachenoura, A.; Merlet, I. A penalized semialgebraic deflation ica algorithm for the efficient extraction of interictal epileptic signals. IEEE J. Biomed. Health Inform. 2017, 21, 94–104. [Google Scholar] [CrossRef] [PubMed]
- Cheng, W.; He, Z.; Zhang, Z. A comprehensive study of vibration signals for a thin shell structure using enhanced independent component analysis and experimental validation. J. Vib. Acoust. Trans. ASME 2014, 136, 041011. [Google Scholar] [CrossRef]
- Liang, J.; Wang, X.; Wang, F.; Huang, Z.-T. Blind spreading sequence estimation algorithm for long-code ds-cdma signals in asynchronous multi-user systems. IET Signal Process. 2017, 11, 704–710. [Google Scholar] [CrossRef]
- Cheng, W.; Lee, S.; Zhang, Z.; He, Z. Independent component analysis based source number estimation and its comparison for mechanical systems. J. Sound Vib. 2012, 331, 5153–5167. [Google Scholar] [CrossRef]
- Haibo, W.; Shaowei, F.; Shaochun, D. Study on the percentage of mechanical vibration source’s contribution of an underwater vehicle. In Proceedings of the 2010 International Conference on Information Management, Innovation Management and Industrial Engineering (ICIII), Kunming, China, 26–28 November 2010; pp. 441–444. [Google Scholar]
- Bofill, P.; Zibulevsky, M. Underdetermined blind source separation using sparse representations. Signal Process. 2001, 81, 2353–2362. [Google Scholar] [CrossRef]
- Aissa-El-Bey, A.; Linh-Trung, N.; Abed-Meraim, K.; Belouchrani, A.; Grenier, Y. Underdetermined blind separation of nondisjoint sources in the time-frequency domain. IEEE Trans. Signal Process. 2007, 55, 897–907. [Google Scholar] [CrossRef]
- Peng, D.; Xiang, Y. Underdetermined blind source separation based on relaxed sparsity condition of sources. IEEE Trans. Signal Process. 2009, 57, 809–814. [Google Scholar] [CrossRef]
- Xie, S.; Yang, L.; Yang, J.-M.; Zhou, G.; Xiang, Y. Time-frequency approach to underdetermined blind source separation. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 306–316. [Google Scholar] [PubMed]
- Kim, S.; Yoo, C.D. Underdetermined blind source separation based on subspace representation. IEEE Trans. Signal Process. 2009, 57, 2604–2614. [Google Scholar]
- Liu, C.; Li, Y.; Nie, W. A new underdetermined blind source separation algorithm under the anechoic mixing model. In Proceedings of the 2016 IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 1799–1803. [Google Scholar]
- Reju, V.G.; Koh, S.N.; Soon, Y. An algorithm for mixing matrix estimation in instantaneous blind source separation. Signal Process. 2009, 89, 1762–1773. [Google Scholar] [CrossRef]
- Li, Y.; Nie, W.; Ye, F.; Lin, Y. A mixing matrix estimation algorithm for underdetermined blind source separation. Circuits Syst. Signal Process. 2016, 35, 3367–3379. [Google Scholar] [CrossRef]
- Zhen, L.; Peng, D.; Yi, Z.; Xiang, Y.; Chen, P. Underdetermined blind source separation using sparse coding. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 3102–3108. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Shen, Y.-H.; Cao, M.; Wang, J.-G. Underdetermined blind separation using modified subspace-based algorithm in the time-frequency domain. Sensors 2011, 1, 2. [Google Scholar]
- Rokach, L. A survey of clustering algorithms. In Data Mining and Knowledge Discovery Handbook; Springer: Cham, Switzerland, 2009; pp. 269–298. [Google Scholar]
- Xu, R.; Wunsch, D.C. Survey of clustering algorithms. IEEE Trans. Neural Netw. 2005. [Google Scholar] [CrossRef]
- Thiagarajan, J.J.; Ramamurthy, K.N.; Spanias, A. Mixing matrix estimation using discriminative clustering for blind source separation. Digit. Signal Process. 2013, 23, 9–18. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | SNR (dB) | Average SNR of All Columns | |||
|---|---|---|---|---|---|
| Zhen’s method | 10.01 | 16.50 | 20.05 | 25.92 | 18.12 |
| Reju’s method | 39.63 | 38.47 | 25.35 | 26.15 | 32.40 |
| The proposed method | 43.65 | 41.82 | 37.44 | 39.69 | 40.65 |
| Methods | SNR (dB) | Average SNR of All Sources | |||
|---|---|---|---|---|---|
| Zhen’s method | 9.61 | 9.65 | 7.39 | 6.99 | 8.41 |
| Reju’s method | 10.18 | 9.94 | 8.00 | 8.57 | 9.17 |
| The proposed method | 12.56 | 12.40 | 9.78 | 11.93 | 11.66 |
| Mixed Signals | Methods | Contributions (%) | |||
|---|---|---|---|---|---|
| Zhen’s method | 0.2015 | 0.2790 | 0.1227 | 0.1049 | |
| Reju’s method | 0.2180 | 0.2790 | 0.1544 | 0.2379 | |
| The proposed method | 0.2368 | 0.2857 | 0.1734 | 0.3090 | |
| Real contributions | 0.2314 | 0.2780 | 0.1630 | 0.3018 | |
| Zhen’s method | 0.2152 | 0.2799 | 0.1534 | 0.1083 | |
| Reju’s method | 0.2591 | 0.2877 | 0.1665 | 0.2090 | |
| The proposed method | 0.2615 | 0.2963 | 0.1998 | 0.2517 | |
| Real contributions | 0.2529 | 0.2872 | 0.1862 | 0.2447 | |
| Zhen’s method | 0.3791 | 0.2791 | 0.1400 | 0.2591 | |
| Reju’s method | 0.4275 | 0.2810 | 0.0854 | 0.1239 | |
| The proposed method | 0.4381 | 0.3079 | 0.1009 | 0.1594 | |
| Real contributions | 0.4229 | 0.2939 | 0.0906 | 0.1501 | |
| Mixed Signals | Methods | Contribution Errors (%) | |||
|---|---|---|---|---|---|
| Zhen’s method | 6.52 | 2.22 | 6.57 | 21.45 | |
| Reju’s method | 1.70 | 1.28 | 3.89 | 6.72 | |
| The proposed method | 0.84 | 0.78 | 1.13 | 1.37 | |
| Zhen’s method | 6.00 | 2.71 | 6.10 | 16.32 | |
| Reju’s method | 1.26 | 0.92 | 4.47 | 4.09 | |
| The proposed method | 1.05 | 1.00 | 1.37 | 1.15 | |
| Zhen’s method | 6.14 | 3.26 | 5.84 | 13.51 | |
| Reju’s method | 1.11 | 2.25 | 2.03 | 3.08 | |
| The proposed method | 1.80 | 1.78 | 1.03 | 1.04 | |
| Mixed Signals | Methods | Contributions (%) | ||
|---|---|---|---|---|
| Zhen’s method | 21.82 | 46.50 | 39.00 | |
| Reju’s method | 28.29 | 43.30 | 12.98 | |
| The proposed method | 3.10 | 47.43 | 50.27 | |
| Real contributions | 7.31 | 47.15 | 47.64 | |
| Zhen’s method | 59.90 | 17.18 | 24.36 | |
| Reju’s method | 61.91 | 16.56 | 2.19 | |
| The proposed method | 38.97 | 16.96 | 40.20 | |
| Real contributions | 45.41 | 17.09 | 36.54 | |
| Mixed Signals | Methods | Contribution Errors (%) | ||
|---|---|---|---|---|
| Zhen’s method | 14.51 | 0.65 | 8.64 | |
| Reju’s method | 20.98 | 3.85 | 34.66 | |
| The proposed method | 4.21 | 0.28 | 2.63 | |
| Zhen’s method | 14.49 | 0.09 | 12.18 | |
| Reju’s method | 16.50 | 0.53 | 34.35 | |
| The proposed method | 6.44 | 0.13 | 3.66 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, J.; Cheng, W.; Zi, Y. A Novel Underdetermined Blind Source Separation Method and Its Application to Source Contribution Quantitative Estimation. Sensors 2019, 19, 1413. https://doi.org/10.3390/s19061413
Lu J, Cheng W, Zi Y. A Novel Underdetermined Blind Source Separation Method and Its Application to Source Contribution Quantitative Estimation. Sensors. 2019; 19(6):1413. https://doi.org/10.3390/s19061413
Chicago/Turabian StyleLu, Jiantao, Wei Cheng, and Yanyang Zi. 2019. "A Novel Underdetermined Blind Source Separation Method and Its Application to Source Contribution Quantitative Estimation" Sensors 19, no. 6: 1413. https://doi.org/10.3390/s19061413
APA StyleLu, J., Cheng, W., & Zi, Y. (2019). A Novel Underdetermined Blind Source Separation Method and Its Application to Source Contribution Quantitative Estimation. Sensors, 19(6), 1413. https://doi.org/10.3390/s19061413