Identifying Traffic Context Using Driving Stress: A Longitudinal Preliminary Case Study






Abstract
:1. Introduction
2. Methods
2.1. Participant
2.2. Apparatus
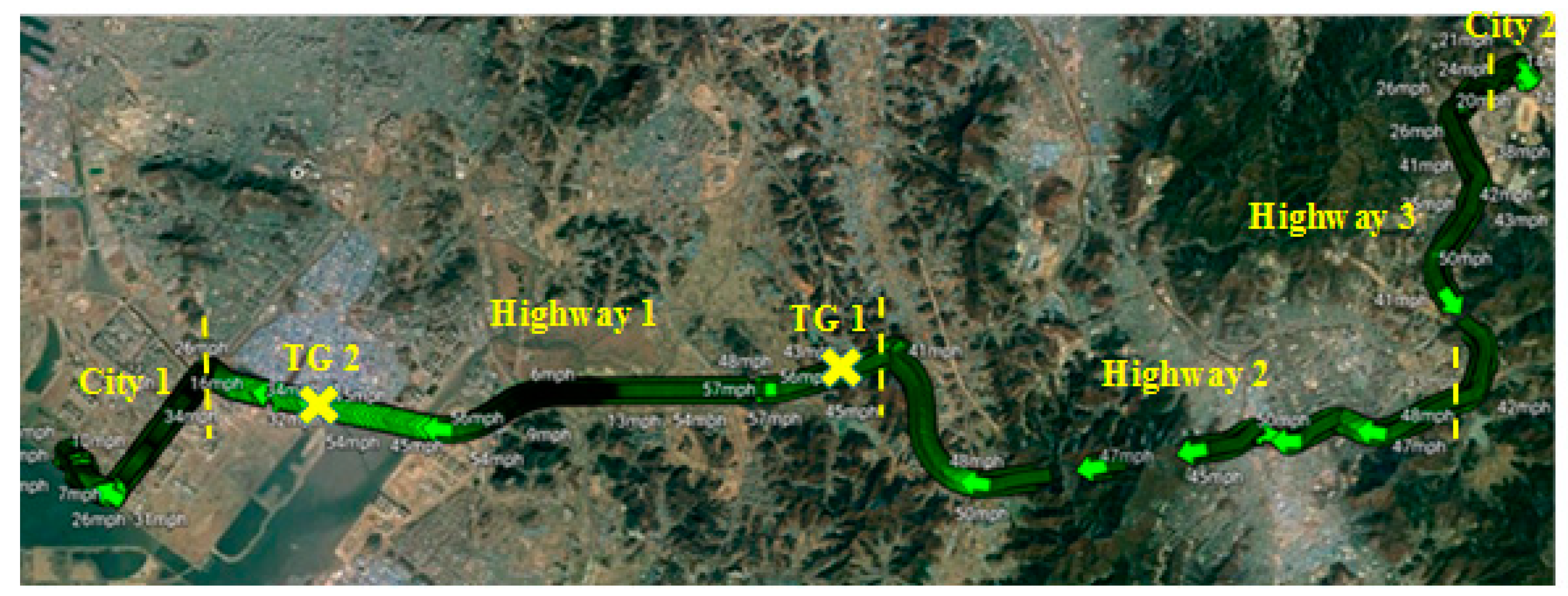
2.3. Experimental Conditions
2.4. Measures
2.5. Analysis Method
3. Results
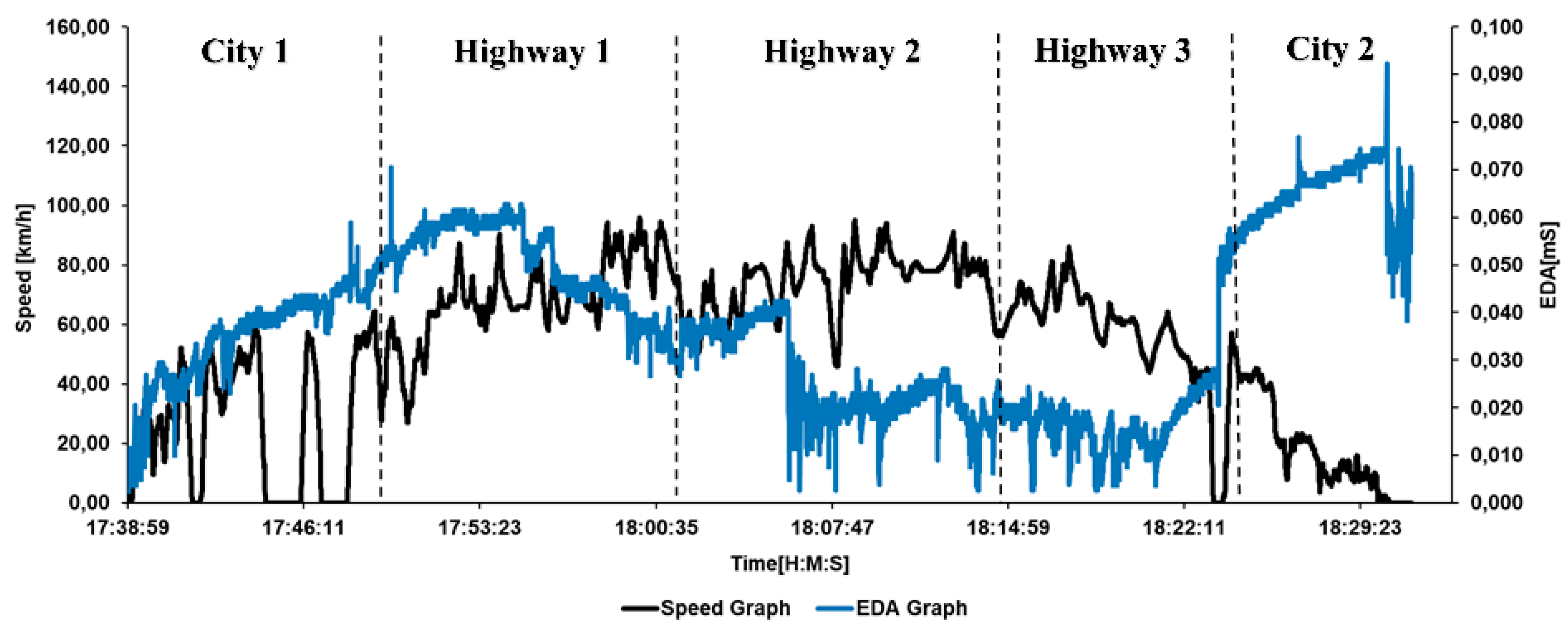
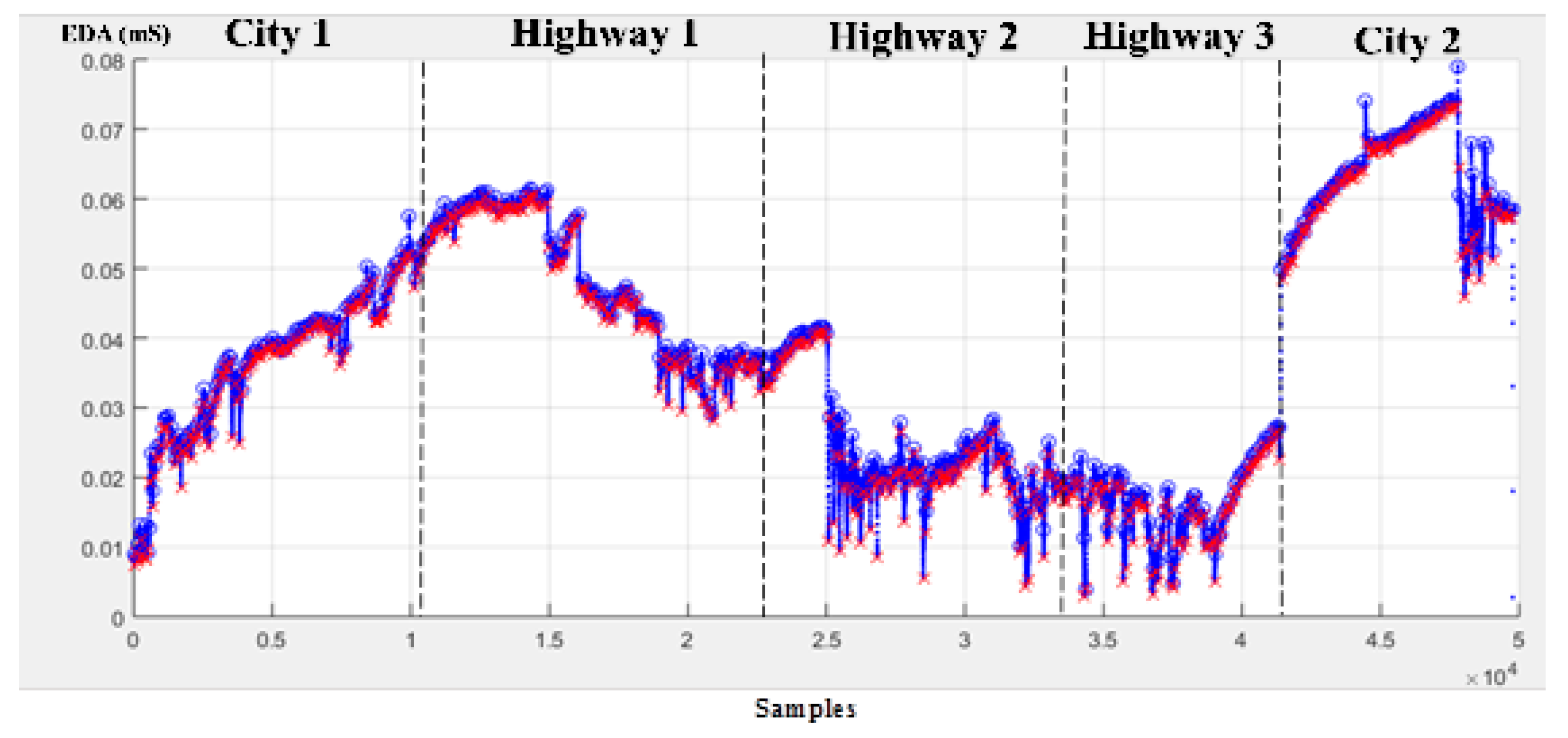
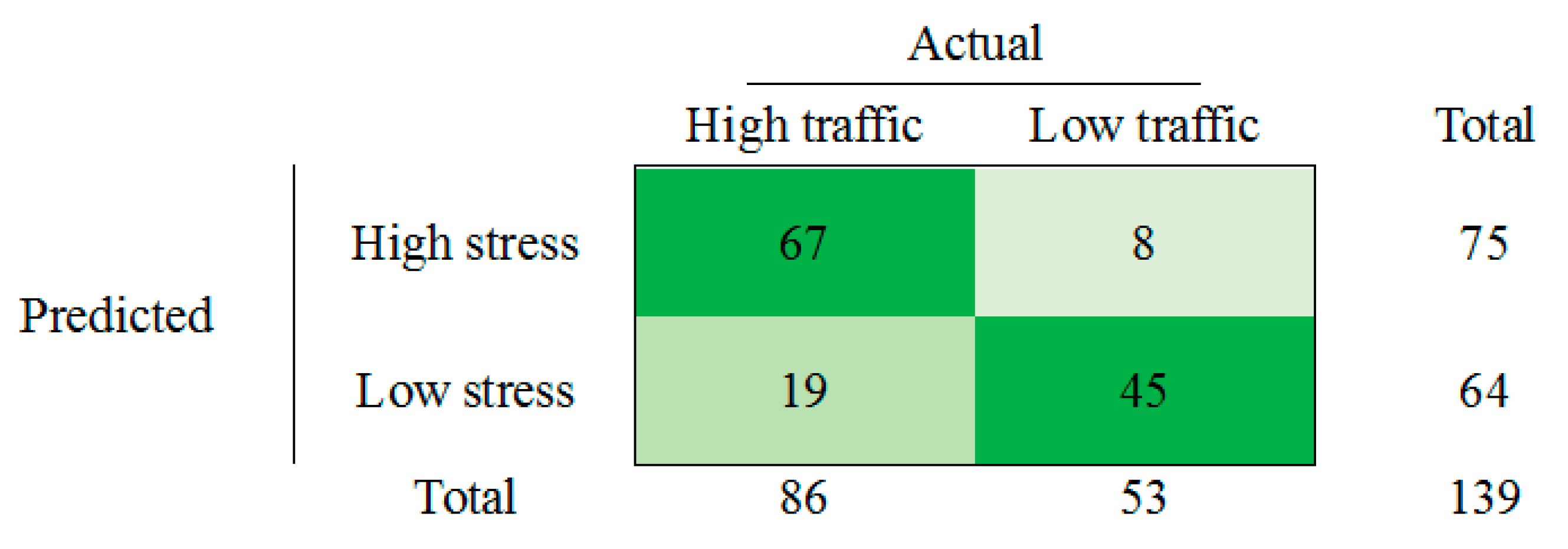
3.1. Traffic Conditions
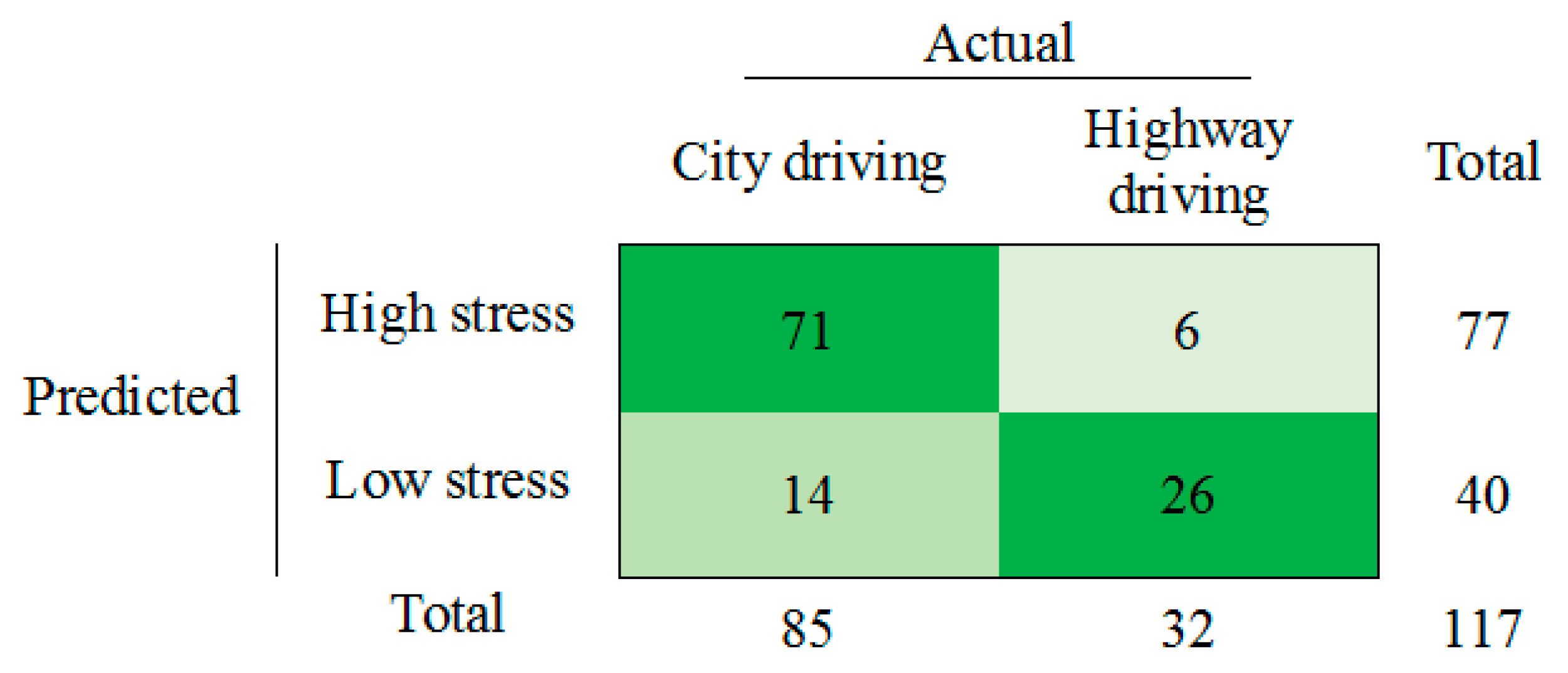
3.2. Road Type
4. Discussion
4.1. Predictability of Stress State Depending on Traffic Conditions and Road Type
4.2. Limitation of This Study and Future Research
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Antoun, M.; Ding, D.; Bohn-Goldbaum, E.E.; Michael, S.; Edwards, K.M. Driving in an urban environment, the stress response and effects of exercise. Ergonomics 2018, 61, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Rigas, G.; Goletsis, Y.; Bougia, P.; Fotiadis, D.I. Towards driver’s state recognition on real driving conditions. Int. J. Veh. Technol. 2011, 2011, 617210. [Google Scholar] [CrossRef]
- Munoz-Organero, M.; Corcoba-Magana, V. Predicting upcoming values of stress while driving. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1802–1811. [Google Scholar] [CrossRef]
- Matthews, G.; Tsuda, A.; Xin, G.; Ozeki, Y. Individual differences in driver stress vulnerability in a Japanese sample. Ergonomics 1999, 42, 401–415. [Google Scholar] [CrossRef]
- Healey, J.A.; Picard, R.W. Detecting stress during real-world driving tasks using physiological sensors. IEEE Trans. Intell. Transp. Syst. 2005, 6, 156–166. [Google Scholar] [CrossRef]
- Westerink, J.H.D.M.; Ouwerkerk, M.; Overbeek, T.J.M.; Pasveer, W.F.; DeRuyter, B. Probing Experience; Springer: Berlin, Germany, 2008; p. 14. [Google Scholar]
- Dwight, A.H.; David, L.W. The relationship between traffic congestion, driver stress and direct versus indirect coping behaviours. Ergonomics 1997, 40, 348–361. [Google Scholar] [Green Version]
- Hill, J.D.; Boyle, L.N. Driver stress as influenced by driving maneuvers and roadway conditions. Transp. Res. Part F Traffic Psychol. Behav. 2007, 10, 177–186. [Google Scholar] [CrossRef]
- Affanni, A.; Bernardini, R.; Piras, A.; Rinaldo, R.; Zontone, P. Driver’s stress detection using skin potential response signals. Measurement 2018, 122, 264–274. [Google Scholar] [CrossRef]
- Liu, Y.; Du, S. Psychological stress level detection based on electrodermal activity. Behav. Brain Res. 2018, 341, 50–53. [Google Scholar] [CrossRef]
- Ollander, S.; Godin, C.; Charbonnier, S.; Campagne, A. Feature and sensor selection for detection of driver stress. In Proceedings of the 3rd International Conference on Physiological Computing Systems, Lisbon, Portugal, 27–28 July 2016; pp. 115–122. [Google Scholar]
- Ooi, J.S.K.; Ahmad, S.A.; Chong, Y.Z.; Ali, S.H.M.; Ai, G.; Wagatsuma, H. Driver emotion recognition framework based on electrodermal activity measurements during simulated driving conditions. In Proceedings of the IEEE-EMBS Conference on Biomedical Engineering and Sciences, Orlando, FL, USA, 16–19 February 2017; pp. 365–369. [Google Scholar]
- Farnsworth, B. What Is GSR (Galvanic Skin Response) and How Does It Work? Available online: https://imotions.com/blog/gsr/ (accessed on 10 April 2019).
- Zangroniz, R.; Martinez-Rodrigo, A.; Manuel, P.J.; Lopez, M.T.; Antonio, F.C. Electrodermal activity Sensor for classification of calm/distress condition. Sensors 2017, 17, 2324. [Google Scholar] [CrossRef]
- Rigas, G.; Katsis, C.; Bougia, P.; Fotiadis, D. A reasoning-based framework for car driver’s stress prediction. In Proceedings of the 16th Mediterranean Conference on Control and Automation, Ajaccio, France, 25–27 June 2008; pp. 627–632. [Google Scholar]
- Singh, R.R.; Conjeti, S.; Banerjee, R. An approach for real-time stress-trend detection using physiological signals in wearable computing systems for automotive drivers. In Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems, Washington, DC, USA, 5–7 October 2011; pp. 1477–1482. [Google Scholar]
- Munla, N.; Khalil, M.; Shahin, A.; Mourad, A. Driver stress level detection using HRV analysis. In Proceedings of the International Conference on Advances in Biomedical Engineering, Beirut, Lebanon, 16–18 September 2015; pp. 61–64. [Google Scholar]
- Lal, S.K.; Craig, A. Driver fatigue: Electroencephalography and psychological assessment. Psychophysiology 2002, 39, 313–321. [Google Scholar] [CrossRef]
- Plawiak, P.; Acharya, U.R. Novel deep genetic ensemble of classifiers for arrhythmia detection using ECG signals. Neural Comput. Appl. 2019, 1–25. [Google Scholar] [CrossRef]
- Plawiak, P. An estimation of the state of consumption of a positive displacement pump based on dynamic pressure or vibrations using neural networks. Neurocomputing 2014, 144, 471–483. [Google Scholar] [CrossRef]
- Ksiazek, W.; Abdar, M.; Acharya, U.R.; Plawiak, P. A novel machine learning approach for early detection of hepatocellular carcinoma patients. Cogn. Syst. Res. 2018, 54, 116–127. [Google Scholar] [CrossRef]
- Rzecki, K.; Sosnicki, T.; Baran, M.; Nedzwiecki, M.; Krol, M.; Lojewski, T.; Acharya, U.R.; Yildirim, O.; Plawiak, P. Application of computational intelligence methods for the automated identification of paper-ink samples based on LIBS. Sensors 2018, 18, 3670. [Google Scholar] [CrossRef]
- Rzecki, K.; Plawiak, P.; Nedzwiecki, M.; Sosnicki, T.; Leskow, J.; Ciesielski, M. Person recognition based on touch screen gestures using computational intelligence methods. Inf. Sci. 2017, 415–416, 70–84. [Google Scholar] [CrossRef]
- Hennessy, D.A.; Wiesenthal, D.L. Traffic congestion, driver stress, and driver aggression. Aggress. Behav. 1999, 25, 409–423. [Google Scholar] [CrossRef]
- Neighbors, C.; Vietor, N.A.; Knee, C.; Raymond, A. Motivational model of driving anger and aggression. Personal. Soc. Psychol. Bull. 2002, 28, 324–335. [Google Scholar] [CrossRef]
- Mathew, T.V.; Rao, K.V.K. Introduction to Transportation Engineering; NPTEL: Mumbai, India, 2006; 6p. [Google Scholar]
- Praburam, G.; Koorey, G. Effect of on-street parking on traffic speeds. In Proceedings of the IPENZ Transportation Conference, Christchurch, New Zealand, 14 March 2015; pp. 1–9. [Google Scholar]
- Shankar, H.; Raju PL, N.; Rao, K.R.M. Multi model criteria for the estimation of road traffic congestion from traffic flow information based on fuzzy logic. J. Transp. Technol. 2012, 2, 50–62. [Google Scholar] [CrossRef]
- Pattara-Aticom, W.; Pongraibool, P.; Thajchayapong, S. Estimating road traffic congestion using vehicle velocity. In Proceedings of the 6th International Conference on ITS Telecommunications, Chengdu, China, 21–23 June 2006; pp. 1001–1004. [Google Scholar]
- Palubinskas, G.; Kurz, F.; Reinartz, P. Traffic congestion parameter estimation in time series of airborne optical remote sensing images. In Proceedings of the SPRS Hannover Workshop 2009—High Resolution Earth Imaging, Hannover, Germany, 2–5 June 2009; p. 6. [Google Scholar]
- Thianniwet, T.; Phosaard, S.; Pattara-Atikom, W. Classification of road traffic congestion levels from GPS data using a decision tree algorithm and sliding windows. In Proceedings of the World Congress on Engineering, London, UK, 1–3 July 2009; pp. 1–5. [Google Scholar]
- Singh, R.R.; Conjeti, S.; Banerjee, R. Assessment of driver stress from physiological signals collected under real-time semi-urban driving scenarios. Int. J. Comput. Intell. Syst. 2014, 7, 909–923. [Google Scholar] [CrossRef]
- He, F.; Yan, X.; Liu, Y.; Ma, L. A traffic congestion assessment method for urban road networks based on speed performance index. Procedia Eng. 2016, 137, 425–433. [Google Scholar] [CrossRef]
- Xing, J.; Hirai, S. Driving stress of drivers on narrowed line and hard shoulder of motorways. PEOPLE Int. J. Soc. Sci. 2017, 3, 124–135. [Google Scholar]
- Matthews, G.; Dorn, L.; Glendon, I. Personality correlates of driver stress. Personal. Individ. Differ. 1991, 12, 535–549. [Google Scholar] [CrossRef]
- Keshan, N.; Parimi, P.V.; Bichindaritz, I. Machine learning for stress detection from ECG signals in automobile drivers. In Proceedings of the IEEE International Conference on Big Data, Santa Clara, CA, USA, 29 October–1 November 2015; pp. 1–7. [Google Scholar]
- Goel, S.; Kau, G.; Toma, P. A novel technique for stress recognition using ECG signal pattern. Curr. Pediatr. Res. 2017, 21, 674–679. [Google Scholar]
- Riener, A. Sitting postures and electrocardiograms: A method for continuous and non-disruptive driver authentication. In Continuous Authentication Using Biometrics: Data, Models, and Metrics; IGI Global: Hershey, PA, USA, 2012; pp. 137–168. [Google Scholar]
- Lee, H.B.; Kim, J.S.; Kim, Y.S.; Baek, H.J.; Ryu, M.S.; Park, K.S. The relationship between HRV parameters and stressful driving situation in the real road. In Proceedings of the 6th International Special Topic Conference on Information Technology Applications in Biomedicine, Tokyo, Japan, 8–11 November 2007; p. 9827162. [Google Scholar]
- Mundell, C.; Vielma, J.P.; Zaman, T. Predicting performance under stressful conditions using galvanic skin response. arXiv 2016, arXiv:160601836. [Google Scholar]
- Kurniawan, H.; Maslov, A.V.; Pechenizkiy, M. Stress detection from speech and galvanic skin response signals. In Proceedings of the 26th IEEE International Symposium on Computer-Based Medical Systems, Porto, Portugal, 20–22 June 2013. [Google Scholar]
- E4 UM. Empatica, User’s Manual 2018. Available online: https://empatica.app.box.com/v/E4-User-Manual (accessed on 10 April 2019).
- OBD Site. Available online: https://www.obdautodoctor.com/ (accessed on 10 April 2019).
- Lyu, N.; Xie, L.; Wu, C.; Fu, Q.; Deng, C. Driver’s cognitive workload and driving performance under traffic sign information exposure in complex environments: A case study of the highways in China. Int. J. Environ. Res. Public Health 2017, 14, 203. [Google Scholar] [CrossRef] [PubMed]
- Taylor, A.H.; Dorn, L. Stress, fatigue, health, and risk of road traffic accidents among professional drivers: The contribution of physical inactivity. Annu. Rev. Public Health 2006, 27, 371–391. [Google Scholar] [CrossRef] [PubMed]
- Allison, P. What’s the Best R-Squared for Logistic Regression 2013? Available online: https://statisticalhorizons.com/r2logistic (accessed on 10 April 2019).
- CD Site (Comlete Dissertation). Available online: https://www.statisticssolutions.com (accessed on 10 April 2019).
- IBM Site. Available online: https://www.ibm.com/us-en/?lnk=m (accessed on 10 April 2019).
- Mesken, J.; Hagenzieker, M.P.; Rothengatter, T.; de Waard, D. Frequency, determinants, and consequences of different drivers’ emotions: An on-the-road study using self-reports, (observed) behaviour, and physiology. Transp. Res. Part F Traffic Psychol. Behav. 2007, 10, 458–475. [Google Scholar] [CrossRef]
- Villarejo, M.V.; Zapirain, B.G.; Zorrilla, A.M. A stress sensor based on galvanic skin response (GSR) controlled by zigbee. Sensors 2012, 12, 6075–6101. [Google Scholar] [CrossRef]
- Vrijkotte, T.G.M.; Van Doornen, L.J.P.; De Geus, E.J.C. Effects of work stress on ambulatory blood pressure heart rate and heart rate variability. Hypertension 2000, 35, 880–888. [Google Scholar] [CrossRef]
- Rigas, G.; Goletsis, Y.; Fotiadis, D.I. Real-time drivers stress event detection. IEEE Trans. Intell. Transp. Syst. 2012, 13, 221–234. [Google Scholar] [CrossRef]
- Rigas, G.; Katsis, C.D.; Bougia, P.; Fotiadis, D.I. A reasoning-based framework for car driver’s stress prediction. Control Autom. 2008. [Google Scholar] [CrossRef]
- Magana, V.C.; Organero, M.M.; Fisteus, J.A.; Fernandez, L.S. Estimating the stress for drivers and passengers using deep learning. Proc. JARCA 2016, 2016, 1–6. [Google Scholar]
- Jabon, M.; Bailenson, J.; Pontikakis, E.; Takayama, L.; Nass, C. Facial expression analysis for predicting unsafe driving behavior. IEEE Pervasive Comput. 2011, 10, 84–95. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Brief Description |
|---|---|
| Pattara-Aticom et al. [29] | Authors classified three levels of traffic congestion based on GPS speed data using threshold technique. It was shown that vehicle velocity is an important characteristic of traffic congestion. |
| Palubinskas et al. [30] | Authors introduced the traffic congestion detection approach for image time series and found that average velocity is main the traffic parameter. |
| Thianniwet et al. [31] | Authors proposed a technique to identify road traffic congestion levels using velocity data from a GPS device. Vehicle moving pattern as an important element was extracted through the sliding window technique. |
| Xing et al. [32] | Authors studied the road tunnel traffic safety and built up the traffic assessment model contained the parameter of speed variance. It was shown that speed variance is an important element of traffic evaluation. |
| He et al. [33] | Authors analyzed traffic congestion in urban road networks using speed data. The speed performance index was found as the indicator of road state for congested or smooth traffic. |
| References | Collected Mental and Physical Data | Studied Factors | Analysis Methods |
|---|---|---|---|
| Xing et al. [34] | ECG, eye movement, flicker value, face image, self-reported emotional state | Road conditions (three different highways), traffic conditions, driving environment, vehicle behavior | Questionnaire, detection and processing of low/ high-frequency ratio of heart rate variability |
| Matthews et al. [35] | Self-reported emotional state | Age, type of road (city road, intercity road), frequency of car use, driving conditions (pre-drive, post-drive, weekend), accident involvement, speeding convictions | Questionnaire, factor analysis, ANOVA |
| Singh et al. [32] | GSR, PPG | Urban driving scenarios (pre-driving, relax driving, busy driving, return driving, rost-driving) | Detection and processing the GSR/PPG signals |
| Keshan et al. [36] | ECG | Type of road (city road, highway) | Detection and processing the ECG signal |
| Goel et al. [37] | ECG | Real-time driving in normal road conditions | Detection and processing the ECG signal |
| Riener [38] | ECG, self-reported emotional state | Specific route, fixed daytime | Post-experiment interview, Detection and processing of low/ high frequency ratio of heart rate variability |
| Lee et al. [39] | ECG, PPG | Real-time driving in a busy narrow street | Detection and processing the ECG signal |
| Mundell et al. [40] | GSR | Alternation of rest and driving periods | Detection and processing the GSR signal |
| Kurniawan et al. [41] | Speech signal, GSR | Real-time driving in usual road conditions | Detection and processing the Speech and GSR signals |
| Average Speed (km/h) | Standard Deviation (km/h) | Accuracy (%) | Sensitivity (%) | Specificity (%) | Predictive Value (%) |
|---|---|---|---|---|---|
| 20 | 10 | 77.3 | 78 | 77 | 64 |
| 15 | 78.7 | 68 | 81 | 40 | |
| 20 | 85.8 | 50 | 87 | 15 | |
| 25 | 92.9 | 0 | 93 | 0 | |
| 30 | 97.2 | 0 | 97 | 0 | |
| 30 | 10 | 70.9 | 74 | 68 | 67 |
| 15 | 78 | 81 | 76 | 64 | |
| 20 | 73 | 67 | 75 | 38 | |
| 25 | 87.1 | 82 | 88 | 36 | |
| 30 | 88.6 | 80 | 89 | 36 | |
| 40 | 10 | 71.6 | 73 | 69 | 75 |
| 15 | 72.3 | 75 | 71 | 65 | |
| 20 | 80.3 | 85 | 78 | 70 | |
| 25 | 76.6 | 70 | 78 | 43 | |
| 30 | 79.4 | 72 | 81 | 41 | |
| 50 | 10 | 75.9 | 79 | 71 | 79 |
| 15 | 70.9 | 73 | 68 | 74 | |
| 20 | 73.8 | 76 | 72 | 66 | |
| 25 | 79.4 | 82 | 78 | 68 | |
| 30 | 75.9 | 70 | 78 | 53 |
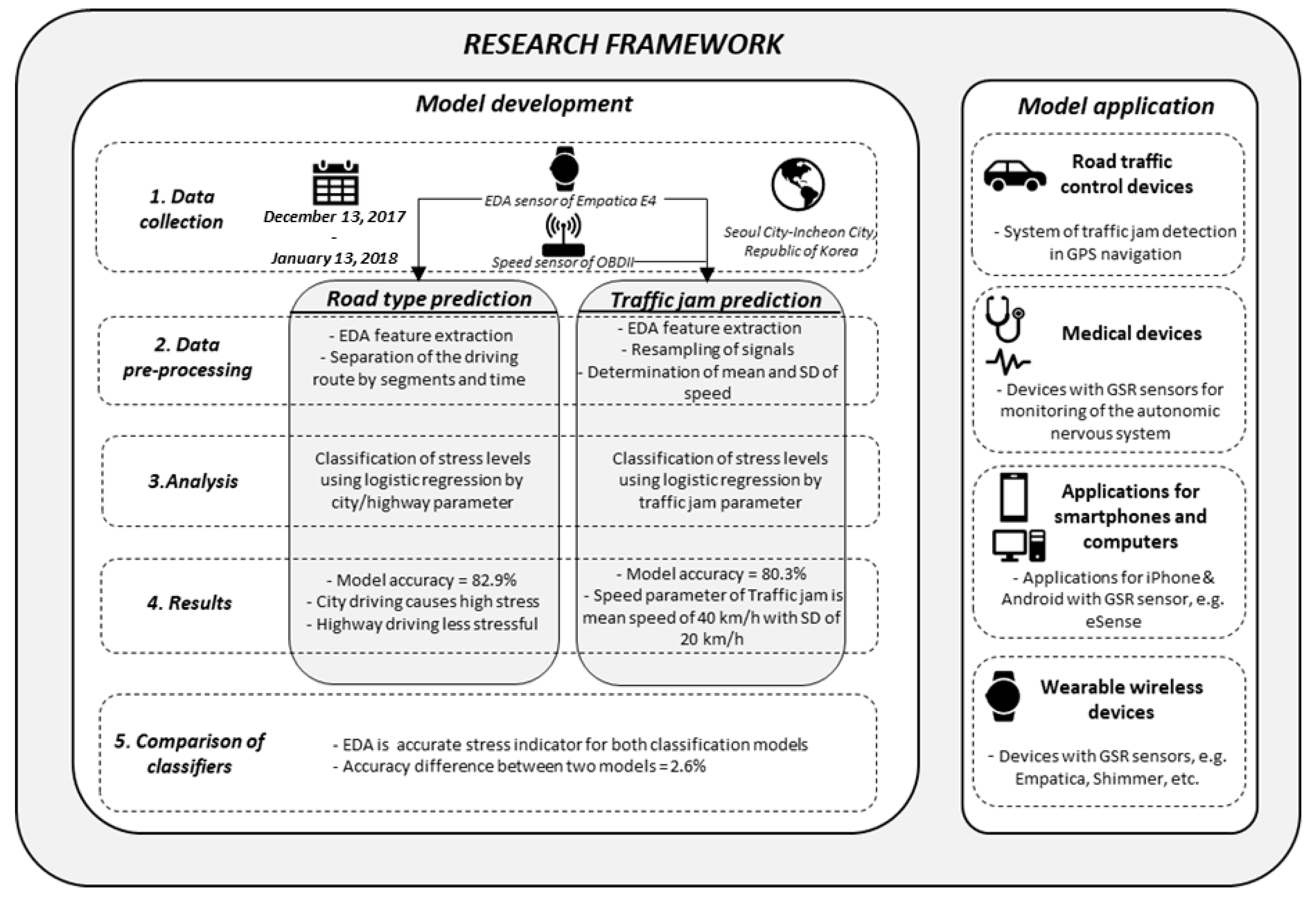
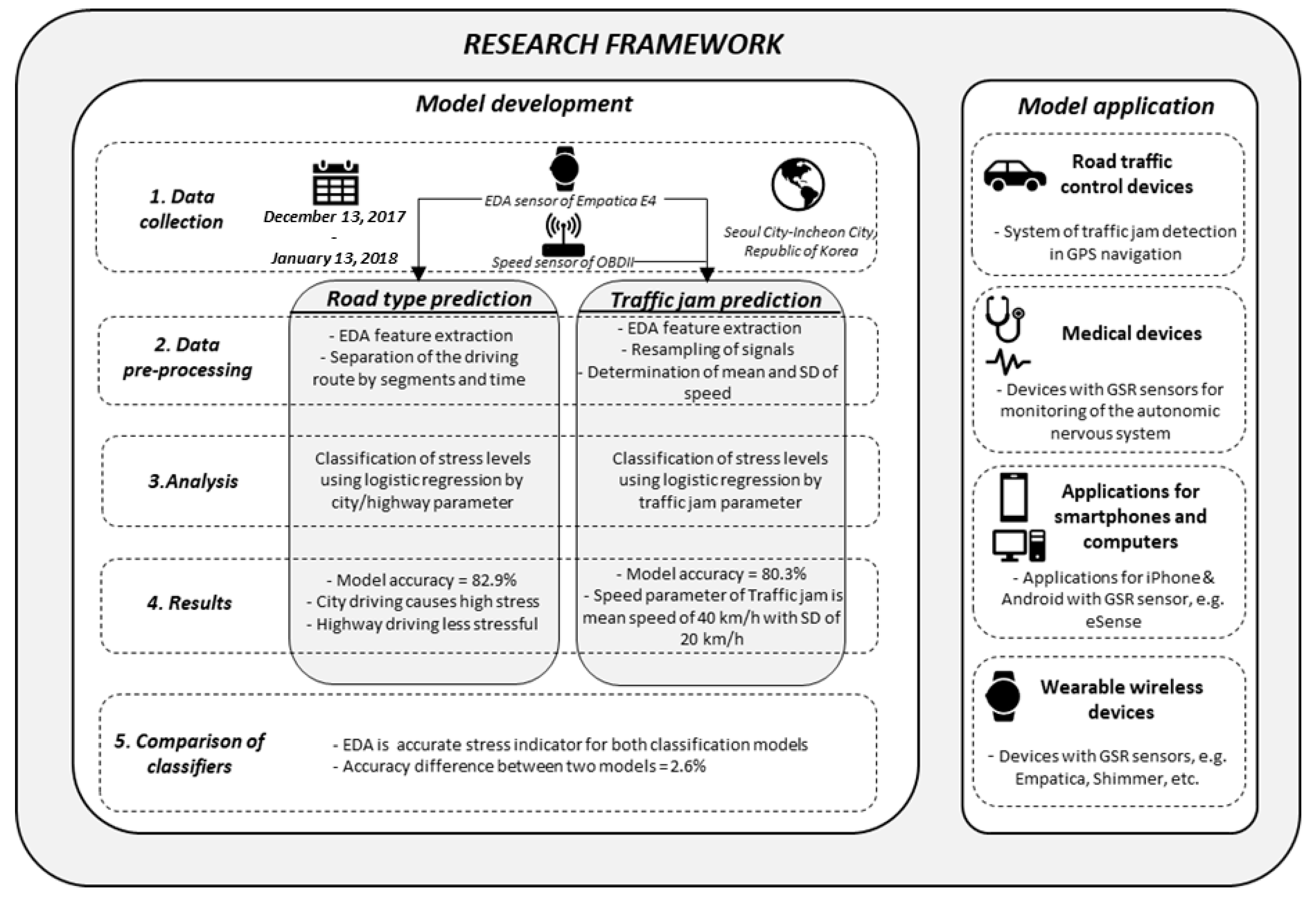
| Classification Model | EDA Signal Features | Driving Conditions Features | Analytical Method | Accuracy |
|---|---|---|---|---|
| Road type prediction | amplitude and duration (min, max, mean, SD, sum, N) | Separation of city and highway section of the path | Logistic regression | 82.9% |
| Traffic jam prediction | amplitude and duration (min, max, mean, SD, sum, N) | Determination of traffic jam criteria using vehicle speed and speed SD | Logistic regression | 80.3% |
| Predictor | Coefficient | p-Value |
|---|---|---|
| N | −0.117 | 0.046 |
| Mean OM | −657.549 | 0.040 |
| Max OM | 66.019 | 0.047 |
| Min OM | 1586.879 | 0.075 |
| Sum OM | 7.747 | 0.063 |
| SD OM | 71.514 | 0.678 |
| Max OD | 0.001 | 0.727 |
| Min OD | −0.005 | 0.219 |
| Sum OD | 0.000 | 0.487 |
| Mean OD | −0.001 | 0.941 |
| Constant | 5.444 | 0.198 |
| Predictor | Coefficient | p-Value |
|---|---|---|
| Min OD | 0.011 | 0.031 |
| Max OD | 0.000 | 0.977 |
| Sum OD | 0.000 | 0.378 |
| Mean OD | −0.009 | 0.240 |
| Mean OM | −128.868 | 0.604 |
| Max OM | −1.864 | 0.918 |
| Min OM | 18.381 | 0.976 |
| Sum OM | 4.682 | 0.176 |
| SD OM | 94.897 | 0.383 |
| N | −0.062 | 0.145 |
| Constant | 3.740 | 0.218 |
| Method | A (%) | Sn (%) | Sp (%) | PPV (%) | Cox & Snell R2 | Nagelkerke R2 |
|---|---|---|---|---|---|---|
| Traffic conditions | 80.3 | 85 | 78 | 70 | 0.323 | 0.432 |
| Road Type | 82.9 | 81 | 84 | 65 | 0.374 | 0.518 |
| 10-Fold Cross-Validation | ROAD TYPE | Traffic Condition | ||||||
|---|---|---|---|---|---|---|---|---|
| Sn | Sp | PPV | AUC | Sn | Sp | PPV | AUC | |
| RF | 64.70 | 88.20 | 76.70 | 85.70 | 60.90 | 86.70 | 79.60 | 79.10 |
| AB | 62.70 | 90.60 | 80.00 | 86.10 | 57.80 | 88.00 | 80.40 | 68.90 |
| NB | 52.90 | 95.30 | 87.10 | 84.70 | 53.10 | 86.70 | 77.30 | 75.60 |
| SVM | 56.90 | 89.40 | 76.30 | 73.10 | 70.30 | 65.30 | 63.40 | 67.80 |
| MLP | 54.90 | 83.50 | 66.70 | 75.50 | 57.80 | 80.00 | 71.20 | 73.80 |
| Testing (30%) Training (70%) | Road Type | Traffic Condition | ||||||
|---|---|---|---|---|---|---|---|---|
| Sn | Sp | PPV | AUC | Sn | Sp | PPV | AUC | |
| RF | 76.47 | 87.50 | 81.25 | 89.46 | 75.00 | 92.31 | 85.71 | 85.82 |
| AB | 76.47 | 83.33 | 76.47 | 83.46 | 68.75 | 57.69 | 50.00 | 62.74 |
| NB | 47.06 | 91.67 | 80.00 | 83.09 | 68.75 | 61.54 | 52.38 | 73.80 |
| SVM | 52.90 | 91.70 | 81.80 | 72.30 | 12.50 | 100.00 | 100.00 | 59.62 |
| MLP | 52.94 | 62.50 | 50.00 | 64.22 | 52.20 | 57.90 | 60.00 | 54.33 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bitkina, O.V.; Kim, J.; Park, J.; Park, J.; Kim, H.K. Identifying Traffic Context Using Driving Stress: A Longitudinal Preliminary Case Study. Sensors 2019, 19, 2152. https://doi.org/10.3390/s19092152
Bitkina OV, Kim J, Park J, Park J, Kim HK. Identifying Traffic Context Using Driving Stress: A Longitudinal Preliminary Case Study. Sensors. 2019; 19(9):2152. https://doi.org/10.3390/s19092152
Chicago/Turabian StyleBitkina, Olga Vl., Jungyoon Kim, Jangwoon Park, Jaehyun Park, and Hyun K. Kim. 2019. "Identifying Traffic Context Using Driving Stress: A Longitudinal Preliminary Case Study" Sensors 19, no. 9: 2152. https://doi.org/10.3390/s19092152
APA StyleBitkina, O. V., Kim, J., Park, J., Park, J., & Kim, H. K. (2019). Identifying Traffic Context Using Driving Stress: A Longitudinal Preliminary Case Study. Sensors, 19(9), 2152. https://doi.org/10.3390/s19092152