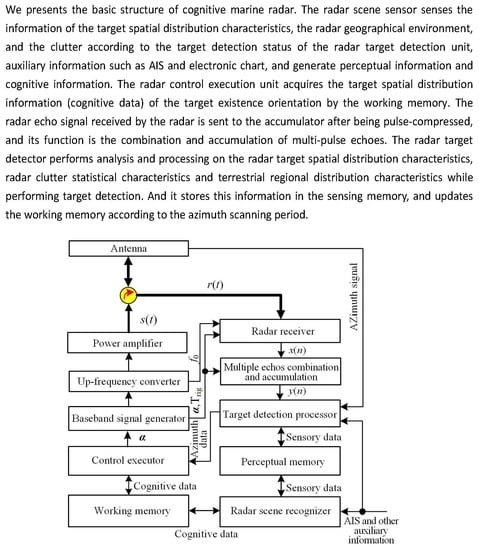
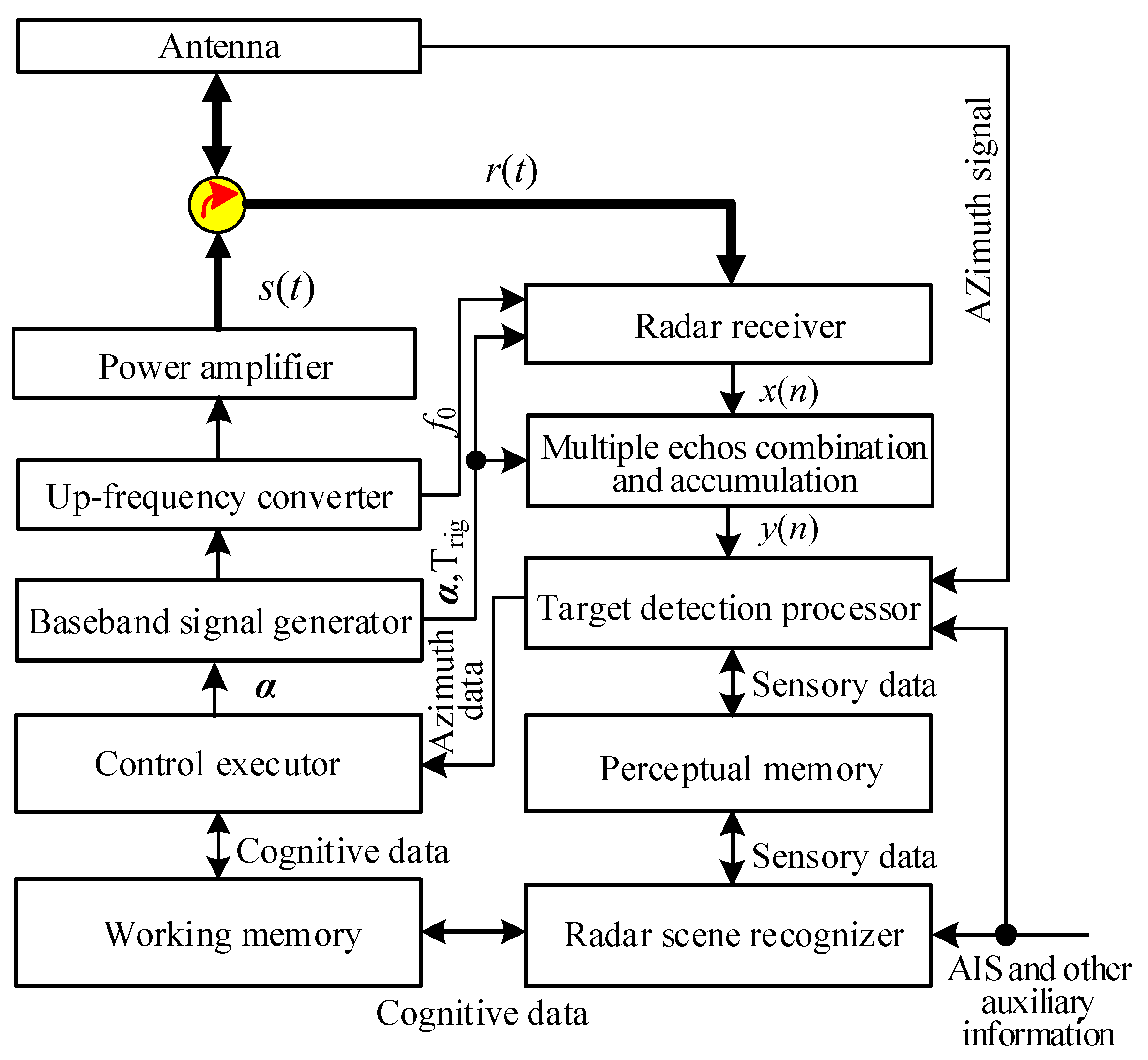
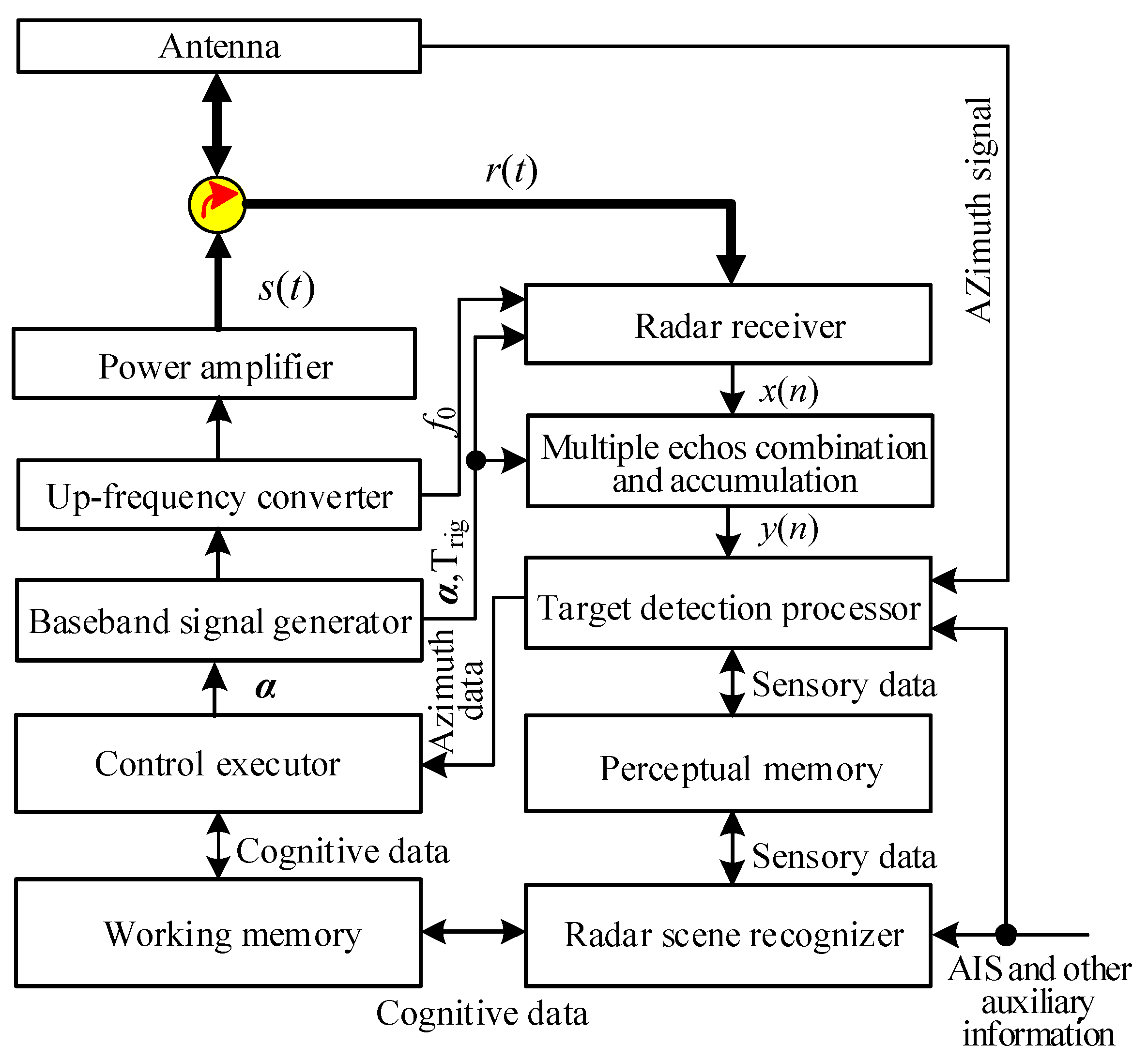
1. Introduction
At present, marine radars always operate in a fixed parameter mode. These parameters, such as transmit pulse width and pulse repetition frequency, are only related to the working range, and are completely independent of factors such as target spatial distribution and working water characteristics. In the near-range mode, due to the narrow pulse emission, the radar range achieved is small, which makes it impossible to track and monitor targets at a long distance. When it is necessary to monitor remote targets, the radar needs to convert a large range, and it is necessary to re-establish tracking for remote targets, so that it is difficult to balance the monitoring and tracking of remote and close-in targets by the radar. For this reason, this paper studies a key technology and a method, which is to apply the technical idea of cognitive radar to marine radar, and how the method realizes cognitive marine radar. The technology and method enable the marine radar to independently control and adjust the transmitted signals and working parameters of the radar according to the working water environment and target space distribution of radar. When the radar can effectively detect and track a wide range of targets, it can also reduce the unnecessary emission of radar and reduce the radar emission energy. This not only enhances the radar work efficiency, but also reduces the radar to the environment electromagnetic radiation influence.
In 2006, Simon Haykin put forward the concept of cognitive radar [
1], and clearly pointed out that cognitive function is an important symbol of new generation radar system [
2]. Cognitive radar integrates brain science and artificial intelligence into radar system [
2], which gives the radar system the ability to perceive the environment; understand the environment; learn, reason and judge decisions; and adapt to the trend of radar intelligence [
3]. The closed-loop working structure of cognitive radar is designed to carry all available resources transmitted and received, and utilizes situational awareness of the working environment to maximize system performance and match the system to the working environment [
4].
In recent years, research results on cognitive radar emerge constantly. The research focuses mainly on the design and selection of optimal transmitting waveform [
5,
6], optimization algorithm of resource allocation [
7,
8], automatic operation and management [
4,
9], and the spectrum sharing with communication and optimal utilization and allocation of channel resources [
10,
11]. A full understanding of the work environment is a fundamental feature of cognitive radar. In this way, the radar transmit waveform and working state can be matched with the radar working environment to obtain the best radar target detection performance and target state estimation performance [
3,
12]. At the same time, the highest radar operating efficiency and the lowest impact on the environment can be obtained [
13,
14]. To this end, in [
15], two metrics for quantifying target tracking performance of cognitive radar are proposed, namely combined cumulative squared deviation (CCSD) and cumulative coherent processing interval (CCPI). These two metrics can be used to optimize radar signal transmission parameters to determine the pulse repetition frequency (PRF) and associated time interval that match the environment. Giusti et al. [
16] analyzed a cognitive multi-platform synthetic aperture radar system design problem, and discussed a method based on cognitive and autonomous learning from observation to implement autonomous waveform diversity system to maximize its performance over time. Aittomaki et al. [
17] proposed an efficient and low computational complexity method for optimizing the power allocation of MIMO radars to achieve maximum discovery probability. This method uses a simpler approximation when establishing optimization criteria for power distribution of target dynamic distribution. The distribution replaces the theoretically precise distribution. Waveform design is a constraint optimization problem with an optimal criterion, usually including one or more performance functions and constraints [
18]. The choice of performance function is usually related to radar task [
19,
20], and different criteria describe the purpose of waveform optimization. The research on the optimal waveform design of this kind mainly focuses on the fields of MIMO radar [
21,
22], tracking radar [
23] and so on. The above research results have played an important role in promoting the development of cognitive radar theory, technology and engineering applications. However, these techniques are not well suited for ordinary civilian radars that place too much emphasis on price and performance, such as marine radar. In the common civil application fields such as marine radar, the practical application research of cognitive radar technology has not received enough attention, and research on cognitive marine radar waveform design is still rare. Under the trend of increasing digitization of transceivers, cognitive marine radars will have more viable implementation conditions in the future. Therefore, the research in this application field also has important theoretical significance and engineering application value.
Marine radar is a radar with a transmitting and receiving common antenna, which works by tracking while scanning. The most difficult to handle situation for marine radar is sea clutter, because the background variation of sea clutter is strong and complicated. Since the non-stationary characteristics of sea clutter are complex and changeable with sea conditions and geographical environment, it is difficult to characterize sea clutter with a precise model. However, due to the slow motion of the radar carrier and the target, the sea clutter mainly manifests as non-stationarity with range and azimuth rather than with time. During the antenna scanning process, the radar can obtain a large amount of clutter observation data, thereby obtaining perceptual information about the intensity of the sea clutter at each local spatial location. At the same time, radar echo and AIS sensors can be used to obtain the distribution information of the target. It can also use the shoreline identification technology [
24,
25] and electronic charts to obtain water environment information. Target detection and tracking performance is mainly restricted by the signal-to-clutter ratio (SCR). Therefore, this paper controls the transmit waveform parameters based on the perception of the SCR. At a certain clutter strength, the echo energy of the target determines the SCR. Using the SCR estimation based transmit waveform parameter control method, it is possible to control the transmitted signal parameters to minimize the emission energy under the premise of ensuring the target detection performance.
The content of this paper is as follows: in
Section 2, the transmitting signal model of cognitive marine radar is described, and the radar transmitting signal model is established. In
Section 3, the transmission mode including a cognitive cycle and an execution cycle is established, and the principles and methods for selecting the parameters of the transmission signal during the execution cycle are given. In
Section 4, the validity of the proposed method is verified by experiments in real waters and compared with the conventional method of transmitting signals with fixed parameters. The conclusions are given in
Section 5.
2. Design of Transmitting Signal Model of Cognitive Marine Radar
Since Linear Frequency Modulated (LFM) has many advantages, it has been used to solve the several problems, for example balance and improve the relationship between the range resolution of the radar and the detection distance; solve the contradiction between distance resolution and speed resolution [
26]; and effectively reduce the peak power of the emission. Therefore, this paper adopts Linear Frequency Modulated (LFM) signal as the basic form of transmitting signal.
For the Track While Scan (TWS) LFM radar with the T-R common antenna, to utilize the echo signal splicing synthesis method shown in
Figure 1, taking into account the minimum and maximum operating range, the transmitted signal adopts a variable parameter transmission signal in the form shown in
Figure 1. The transmit waveform parameters are controlled based on the cognitive radar scene information.
In
Figure 1, let the transmit pulse widths be
,
, which are used to achieve the radar detection on minimum range, medium range and long range, respectively, where
is the control coefficient;
is the basic pulse width of the
ith pulse with fixed values, the pulse interval be
, where
is the random time increment inserted to avoid range ambiguity. The number of achievable waveforms is determined by the number of control coefficients. Increasing the number of values
,
increases the selectable number of waveforms. Letting the values of
,
and
be
m,
n, and
p, respectively, the number of the signal wave is
.
If the transmitted pulse power
is a constant, the transmitted signal energy is
According to the energy principle of matched filter, its detection ability depends only on the signal energy. To enhance the detection capability of the detector, the control energy of the signal can be controlled by the control coefficient . Obviously, the signal energy transmitted by the transmitter and pulse repetition period is controlled by the coefficient . The value of is adjusted by the control unit based on the radar working scene sensing information.
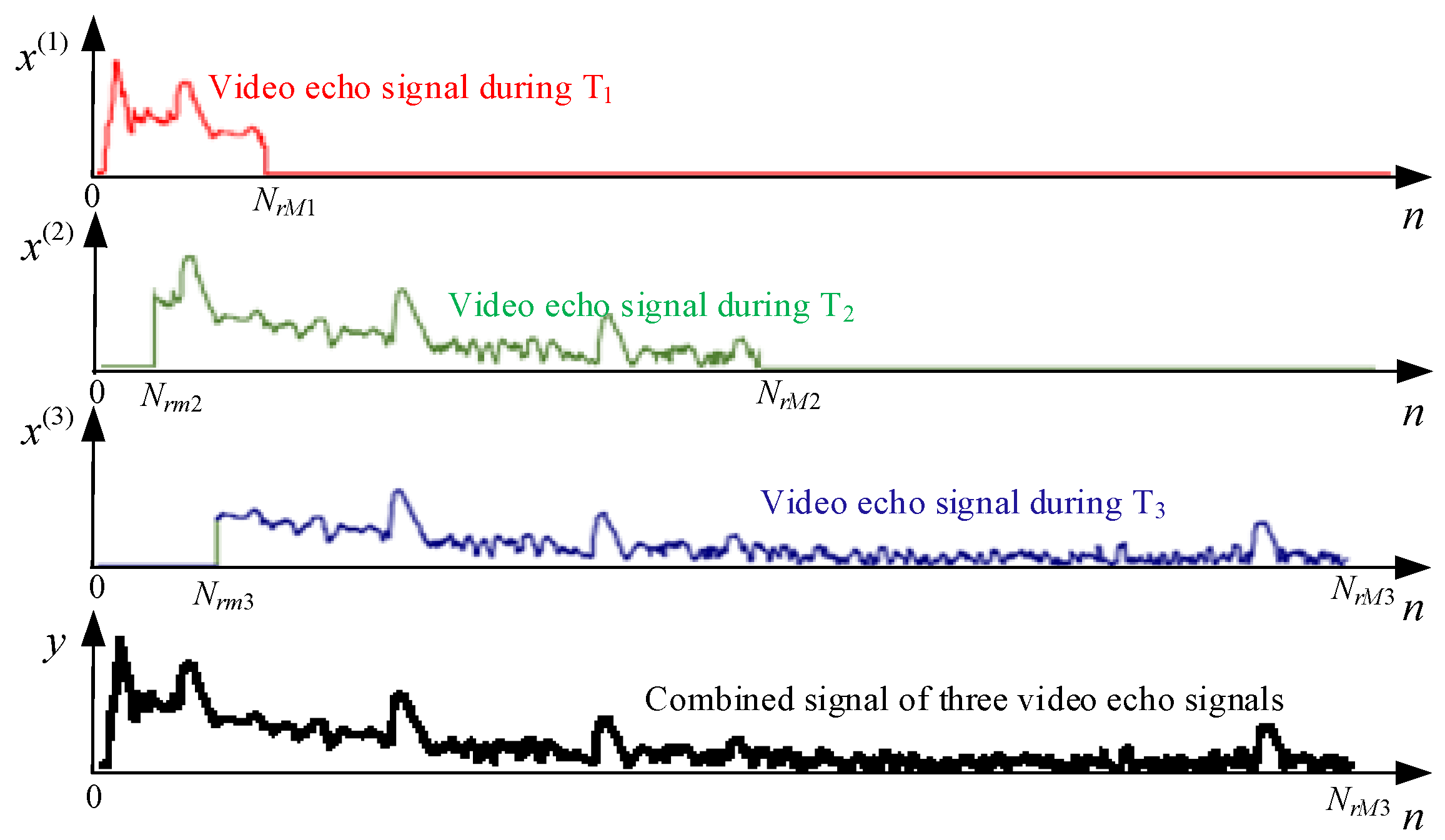
The echo signals generated by the three transmitted signals are pulse-compressed, time-aligned with zero-distance time as reference point, and non-coherent accumulation processing is performed, which can effectively improve the detection capability of the radar. Let the three pulse signals shown in
Figure 1 form a transmission signal group, where the pulse width of the
ith transmitting pulse is
, the amplitude A of the transmitted signal is constant, and the modulation bandwidth is
. Each group of transmitting signals is
here,
,
is the normalized complex envelope of the signal, i.e.,
where
is the frequency modulation slope of the
ith pulse of this transmitted group;
is the basic modulation slope of the
ith pulse;
; the modulation bandwidth of the
ith pulse is
; and
represents a rectangular pulse.
Since the amplitude A of the transmitting signal is constant, in the following analysis, to simplify the representation, it is omitted. Bringing Equation (
3) into Equation (
2), the transmitting signal is written as
Assuming that the pulse repetition period (PRP) of the radar is
, the radar transmits a pulse group of three pulses, as shown in
Figure 2, at that PRF. In the
nth group transmission, a combination of certain pulses under the control parameter
is repeatedly transmitted
K times. Obviously, according to the different control parameters, the pulse repetition period
, pulse width
, frequency modulation bandwidth
and the emission energy
achieved are different. From this, different pulse accumulation numbers, target detection effect, range resolution effect and precision of range measurement can be obtained.
The emission signal composed of K pulse groups shown in
Figure 2 can be expressed as:
among them:
Here, is the repetition period of the signal group, and is the signal group width.
3. Selection Criteria and Control Algorithm for Radar Transmit Signal Parameters
This section studies and analyzes the control strategy of waveform parameters, the distance splicing method of radar echo signals, the control parameter adjustment algorithm based on reference target signal-to-noise ratio, and the working steps and processes of cognitive marine radar. In the part of waveform parameter control strategy, the relationship between the parameters of the radar transmission signal and the number of possible pulses accumulated, as well as the possible detecting distance is analyzed. It provides a basis for developing a transmission signal control parameter selection strategy. On this basis, the selection strategy of radar transmission signal control parameters is discussed and given. In the part of radar echo signal distance stitching, we analyze and discuss the radar echo signal model represented by the matrix. This model effectively reveals the relationship between the echo signals generated by the transmitting signal group constructed in
Section 2. In the part of radar echo signal distance splicing, the radar echo signal model represented by the matrix is analyzed and discussed. The echo signal model in the form of the matrix reveals the method for generating the radar video echo signal conforming to the near and far. In the part of the radar waveform control process, we discuss the work content and process of the two phases of the radar scene perception and cognitive control of the transmitted signal. The content and process are based on the transmitted signal model of cognitive marine radar in
Section 2.
3.1. Waveform Parameter Control Based on Target Spatial Distribution
The radar transmitting signal should first satisfy the target detection and surveillance. The work of radar is divided into two stages, that is, the stage of radar scene perception and the stage of transmitting signal cognitive control. In the stage of radar scene perception, the transmitted signals of the radar can realize the requirements of target detection in the radar surveillance area. In the cognitive control stage of transmitting signal, according to the target spatial distribution and water geographical environment recognized by radar scene perception stage and AIS auxiliary information, control parameters are selected to control the radar transmitting signal and make it match with the radar working environment. Let and be, respectively, the minimum operating distance and maximum operating distance of the pulse generated when takes the jth value. R is the distance of the target. The selection principle of control parameters is to minimize the transmitted energy under the condition of ensuring target detection requirements.
Let the base parameters of the transmitted signal be as shown in
Table 1; in this case, the signal performances of pulse-width, modulation bandwidth and time-bandwidth product achieved for Pulses 2 and 3 under various control parameters are shown in
Table 2.
According to the value of the control parameters of
Table 1, there are a total of 48 groups. The pulse repetition period and the maximum pulse accumulation number
at
and
rev/min under 16 groups of different transmitting signal waveform parameters are shown in
Table 3.
Table 3 shows that, by selecting
, 48 kinds of waveform parameters can be obtained to adapt to various target distributions. In addition, by increasing the pulse repetition rate, more pulse accumulation can be achieved, and the detection performance of the target can be improved more effectively [
27]. Therefore, under the condition of certain target distribution, to ensure reliable detection of the target, pulse repetition frequency should be increased and pulse width should be reduced as much as possible to achieve greater pulse accumulation
M. If
is a distance quantization unit corresponding to
, the distance can be divided into three regions, then, according to the distance distribution of the target, the transmitting signal can be controlled according to the strategy in
Table 4.
3.2. Waveform Control Method Based on Clutter Characteristics
The target detection processor performs target detection on the accumulated composite video signal. The accumulated echo signal can be expressed in the following two cases:
Among them, is two hypothetical representations, no target existence and a target existence; is a video signal generated by the target at the nth distance unit; and is a video signal generated by sea surface reflection at the nth distance unit, or a noise interference term. In the radar clutter region, the impact of sea surface echo is much higher than the noise.
Assuming that the echoes generated by each range unit radar are independent of each other, obviously, according to the central limit theorem, the composite video signal shown in Equation (
12), the probability density function of the clutter tends to be Gaussian distributed. That is, it can be approximated as:
;
, where
and
are, respectively, the mean and standard deviation of the sea surface echoes in the radar illumination area;
and
are, respectively, the mean and standard deviation of the target and sea clutter in the radar-irradiated area where the target exists; and the mean
should have a linear superposition of the mean
of the target reflection and the mean
of the sea clutter, i.e.,
.
Obviously,
is the video mean component determined by the target reflection characteristics.
is a stable echo component determined by sea surface reflection characteristics. If the mean value of the target cell and the adjacent clutter unit are, respectively,
and
, according to the Gaussian distribution characteristic, then
can be approximated to the amplitude of the target video signal, so the target echo energy can be considered as
.
is the standard deviation of the random variation in the target existence area. Similarly, in the radar illumination area where the target exists, the energy of the clutter is
, and the signal-to-clutter ratio (SCR) in the target existence area can be written as:
using the processor in [
28], which averages processing with respect to adaptive neighboring cells.
and
can be estimated by the following equations in the non-target existing area and the target existing area adjacent to the reference target.
Here,
and
are video under two hypotheses,
is the target front distance unit,
is the longitudinal dimension of the target expressed by the number of distance quantized units, and
N is the length of the single-sided reference window based on the adaptive unit statistical averaging algorithm in [
28]. The Probability Density Function (PDF) of the signal
y can be expressed as:
The false alarm probability and detection probability are, respectively:
Obviously, by Equation (
15) given the required false alarm probability, the threshold can be solved.
Under the false alarm probability determined by the threshold of Equation (
17), given the probability of discovery required by Equation (
16), the available detection threshold is
The detection thresholds
in Equations (
17) and (
18) are the same, so there is the following distinguishing relation for cognition and control:
where
and
are uniquely determined by the false alarm probability and the detection probability, respectively. Bringing Equation (
9) into Equation (
19),
can be further expressed by
and
, as shown in Equation (
20):
Obviously, when
and
are determined,
varies with
. Let the cognitive parameters corresponding to the
nth waveform parameter adjustment cycle be expressed as Equation (
21).
The control actuator can obtain the following relationship according to Equation (
21) under the condition of a certain false alarm probability and discovery probability according to the current data recorded in the working memory.
In practical use, the current SCR(n) can be obtained by substituting the estimated values
,
,
, and
into Equations (
21) and (
9).
Table 5 illustrates the relationship between
,
and
,
, under the condition of Gaussian distribution.
3.3. Radar Echo Signal Distance Splicing and Composite Video Generation
Let the complex radar echo signal generated by the
nth group of firing pulses be represented as
, where
m is the distance represented by number of distance quantization units,
i is the transmitted pulse sequence number, the distance detection range of pulse
is
, and the echo signal matrix after pulse compression and time side lobe suppression is:
where
is the
dimension vector, which is the maximum distance unit number. It can be seen from Equation (
23) that the distance range can be divided into the following five distance segments (represented by distance quantization unit), and the corresponding range segments are:
,
,
,
and
, respectively. The rows in Equation (
23) are summed and averaged to obtain a composite video signal during a transmit pulse group as shown in
Figure 3.
where “∗” represents the Hadamard product of the vector, and
U is a coefficient vector determined by the distance, corresponding to the above five distance segments, and the elements of each segment are
,
,
, and 1. Let the number of pulse group accumulations be
M, and accumulate the average of the synthesized video of Equation (
24)
M times:
3.4. Radar Waveform Control Process
The basic flow of the control of the transmitting waveform parameters for the cognitive marine radar based on LFM waveform is as follows:
3.4.1. Radar Scene Perception Steps
The radar scene perception phase is divided into five steps:
Step 1: In the continuous sense detection of 2–5 radar antenna scanning cycle, the records of perceptual memory are generated. In the perceptual detection phase, the control parameters of the radar transmitting signal are: . The control parameters are stored in the execution memory of control execution unit.
Step 2: However, for systems with Geographic Information System (GIS) information, in the target detection processing unit, land shielding technology is used to mask radar echo signals in terrestrial and non-radar detection areas. In addition, the radar target detection data are fused with the location and size information of the Automatic Identification System (AIS) target to achieve target detection and generate target detection record data.
Step 3: The spatial distribution of the target is analyzed, and the estimation data of position for the nearest target and farthest target and clutter parameter are generated.
Step 4: The information record of the perceptual memory is updated, and this updated information record is then analyzed and processed to update the working memory.
Step 5: Ending the sensing detection in this perceptual phase, and transferring to the cognitive control stage for transmitting signal.
3.4.2. Cognitive Control Steps of the Transmitting Signal
The cognitive control stage of the transmitting signal is divided into seven steps:
Step 1: Read information and previous control parameters from the working memory and the control execution memory.
Step 2: Determine the control parameters according to
Table 2.
Step 3: According to the determined control parameter, the waveform control parameter is sent to the multi-pulse echo combination and the accumulator to calculate the achievable pulse accumulation number M, and the M pulse groups form a group for continuous transmission.
Step 4: Read the perceptual memory unit after transmitting the second group and check the detection effect according to Equation (
20), that is, whether the probability of detection meets the requirements. Adjust control parameters according to Equation (
22) and
Table 3, and store the adjusted parameters in the memory of the control execution unit.
Step 5: Repeat the process of Steps 3 and 4 within the range of azimuth determined by the working memory increment.
Step 6: Add an address offset 11 to the current address of the working memory, and repeatc the process of Steps 1–5 until the cognitive control of the antenna azimuth scanning period is completed.
Step 7: Continue the process of Steps 1–6 in this stage for P antenna azimuth scanning cycles (P can be determined according to the target motion situation and the target distance, and P should be appropriately reduced for fast moving targets in close range), and return to the steps of radar scene perception.
5. Conclusiosns
This paper proposes an implementation method of cognitive marine radar based on LFM waveform control, which is used to achieve a good match between radar and working environment. It discusses the structure and transmitted signal model of the cognitive marine radar, and gives the acquisition and recording method of cognitive information for the effective reduction of the radar’s emission energy under the condition of target detection performance; the signal control method of cognitive marine radar controlled by three control parameters; and the workflow of the cognitive marine radar. An experimental system based on this method was developed, and the working effect of the system was verified by field experiments. The experimental results show that the proposed method is effective and feasible. The recognition and good matching of radar working environment under experimental conditions were effectively realized, and while realizing effective detection of radar targets, unnecessary launches, launching energy and electromagnetic interference to the environment were effectively reduced.
In the structure and waveform design of information recognition in this paper, the goal is to effectively reduce the transmitting energy of radar under the condition of ensuring the performance of radar detection; the optimization of target tracking accuracy and reliability has not been fully considered. In addition, the experiments presented in this paper were only carried out in a single radar working environment of inland waters, which has certain limitations. Therefore, for the research of cognitive marine radar, further theoretical, applied and experimental research work is needed in the future.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}