Lane Detection Method with Impulse Radio Ultra-Wideband Radar and Metal Lane Reflectors


Abstract
:1. Introduction
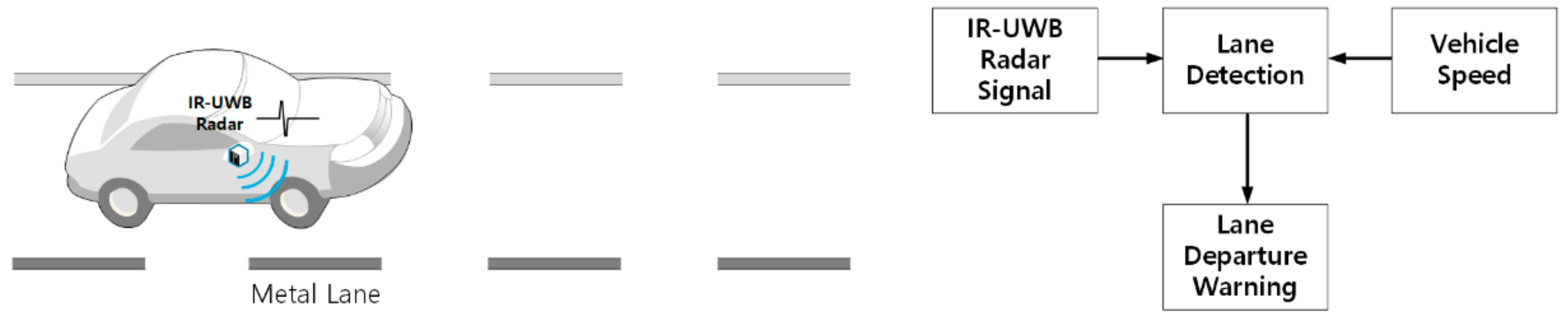
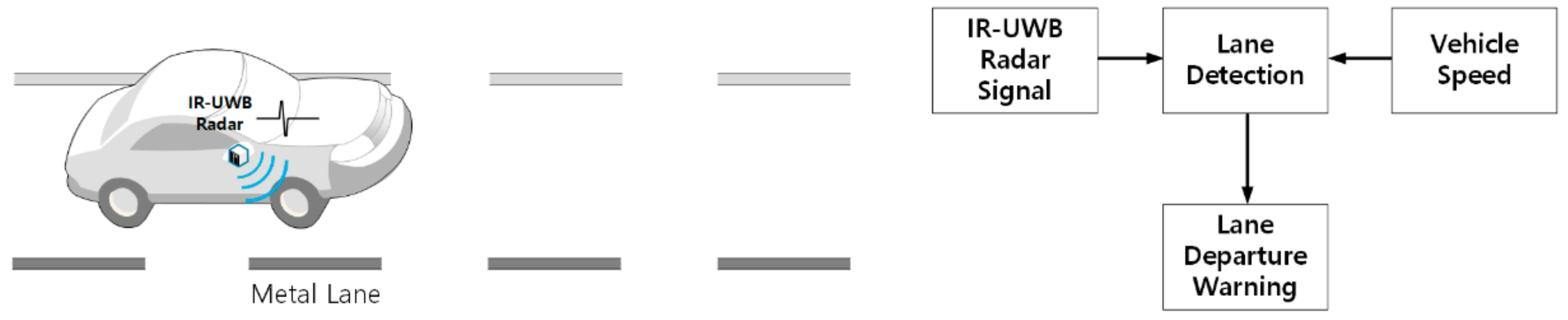
2. System Model
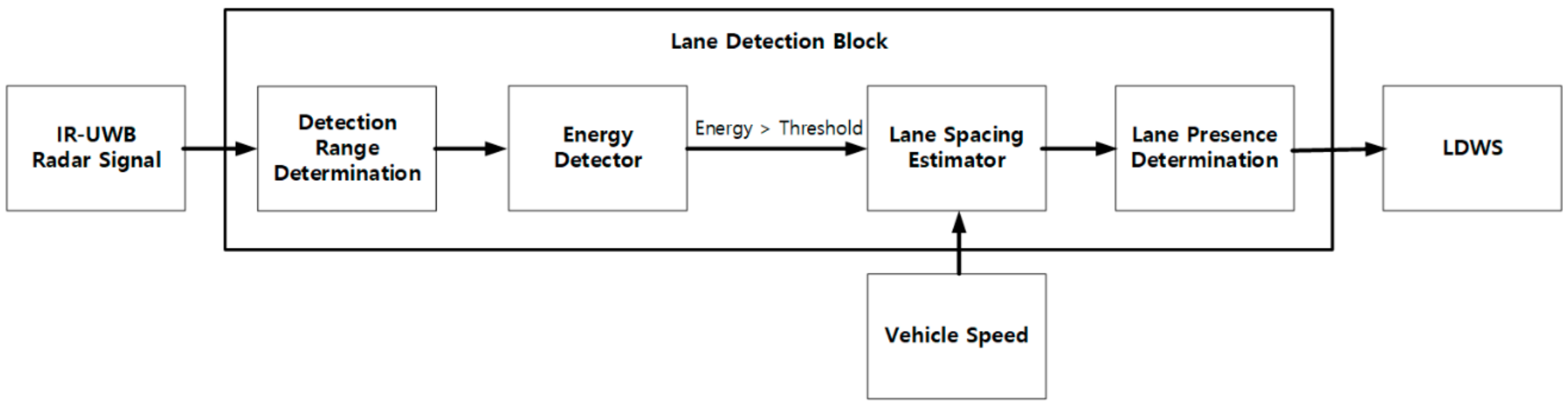
3. Lane Detection Method
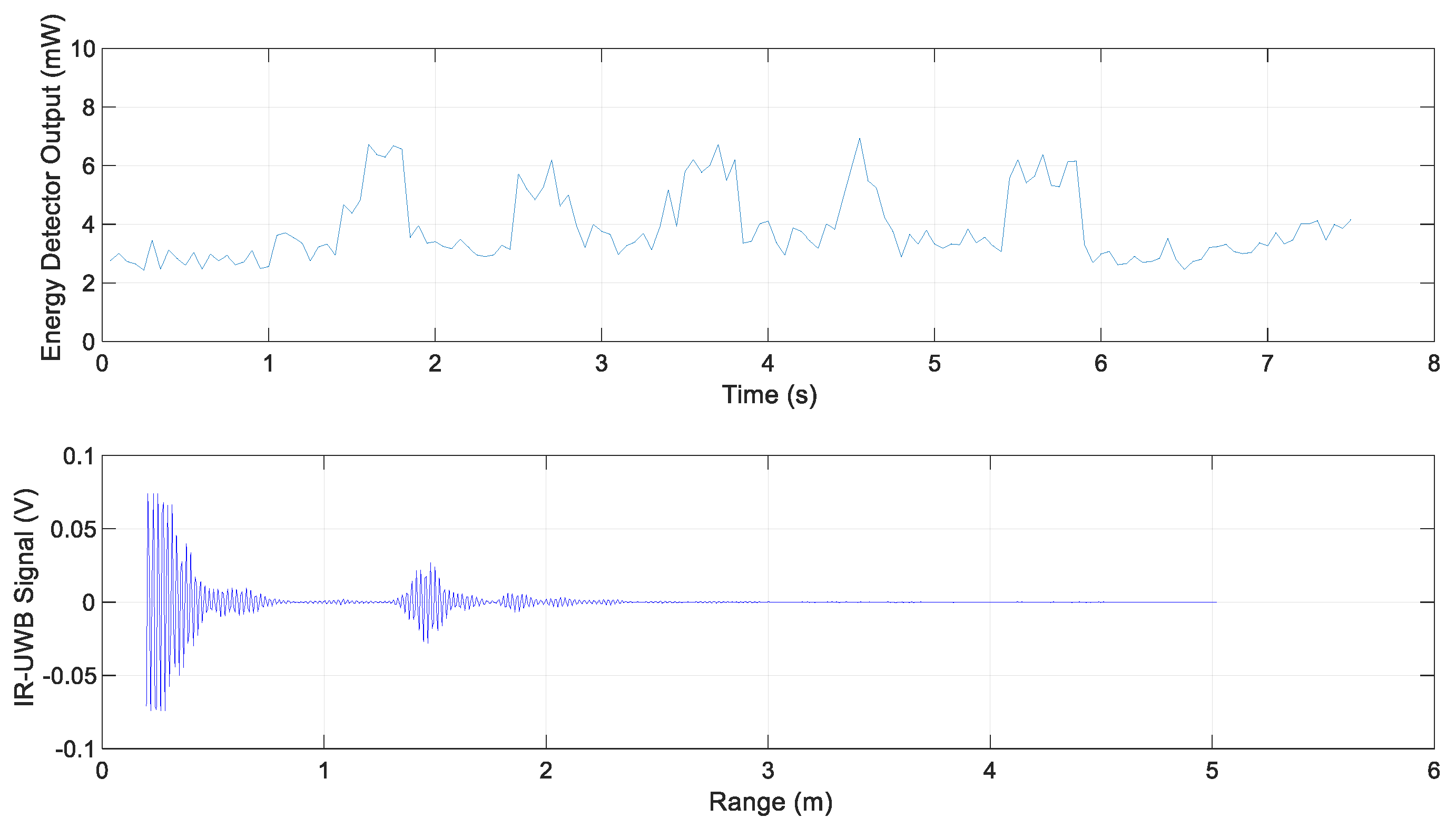
3.1. Detection Range Determination and Energy Detector
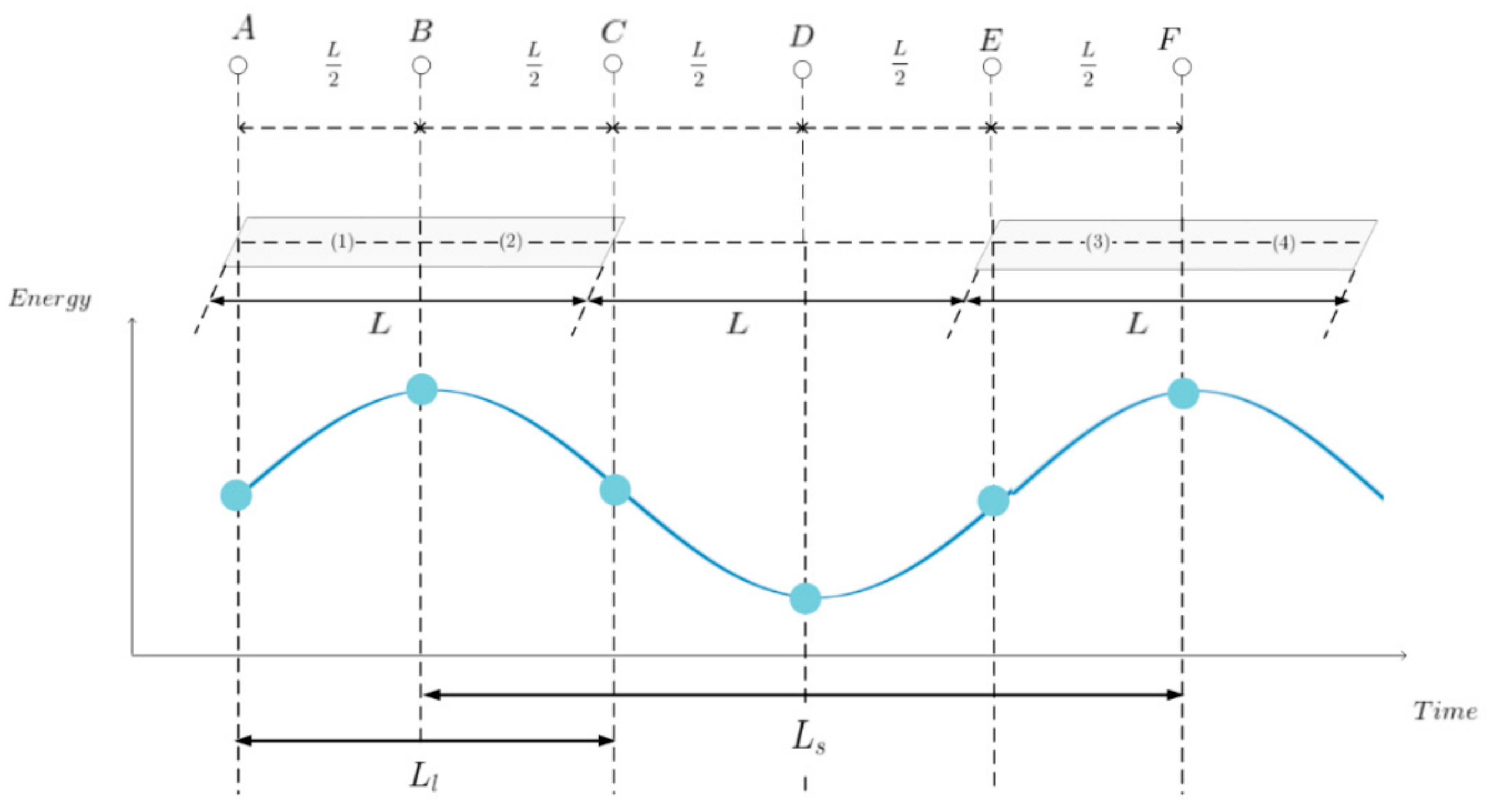
3.2. Lane Spacing Estimation and Lane Presence Determination
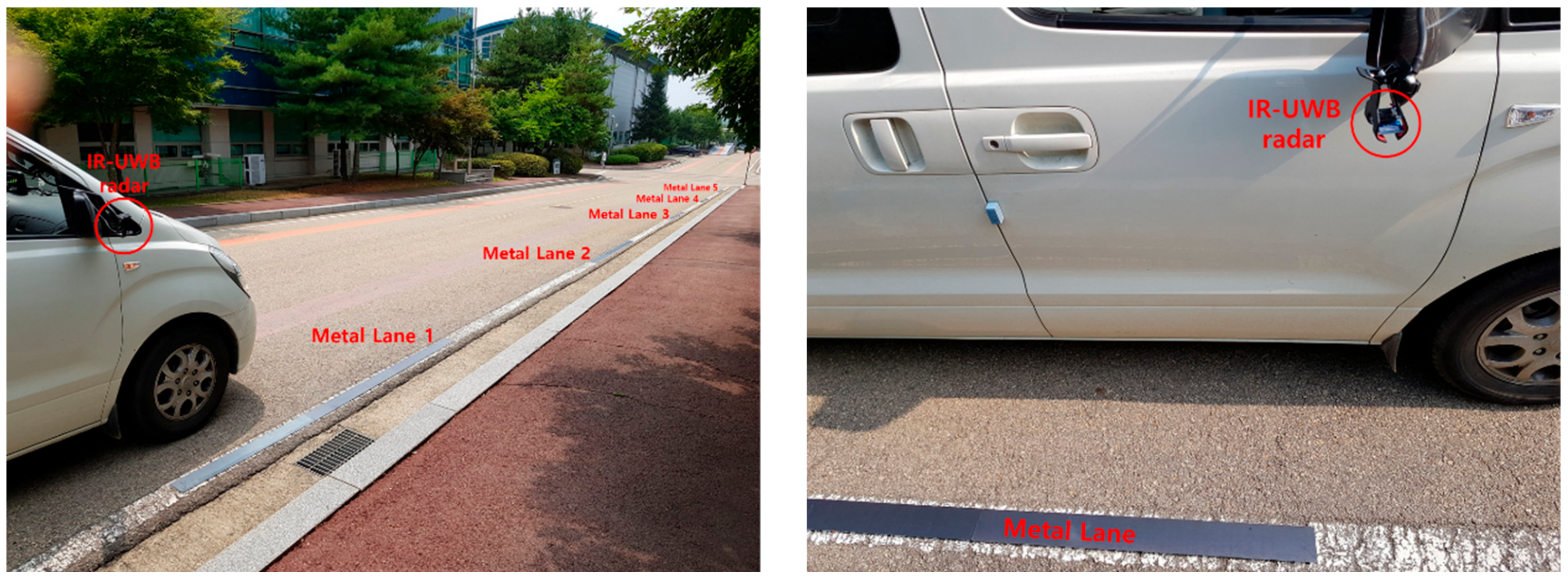
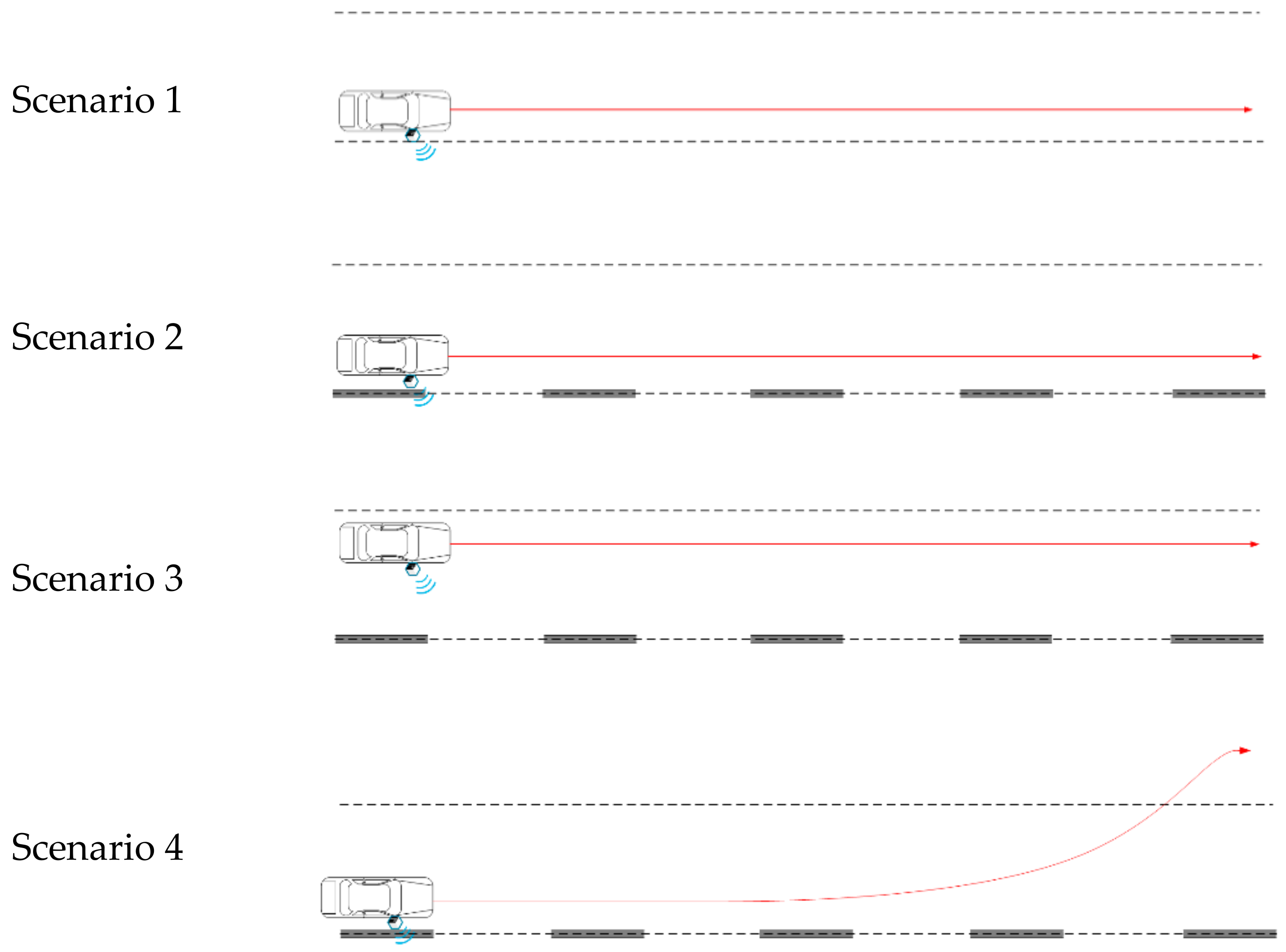
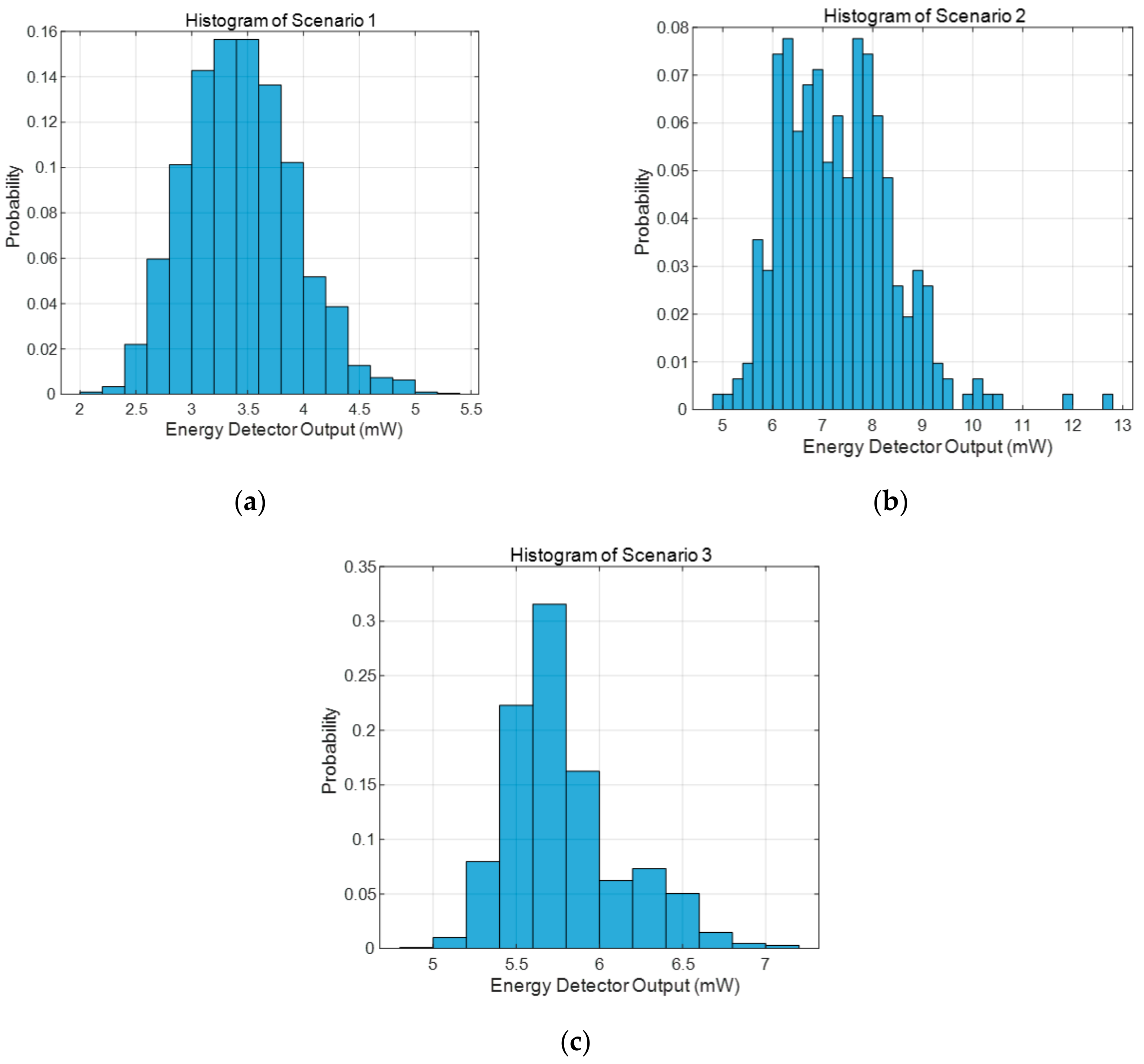
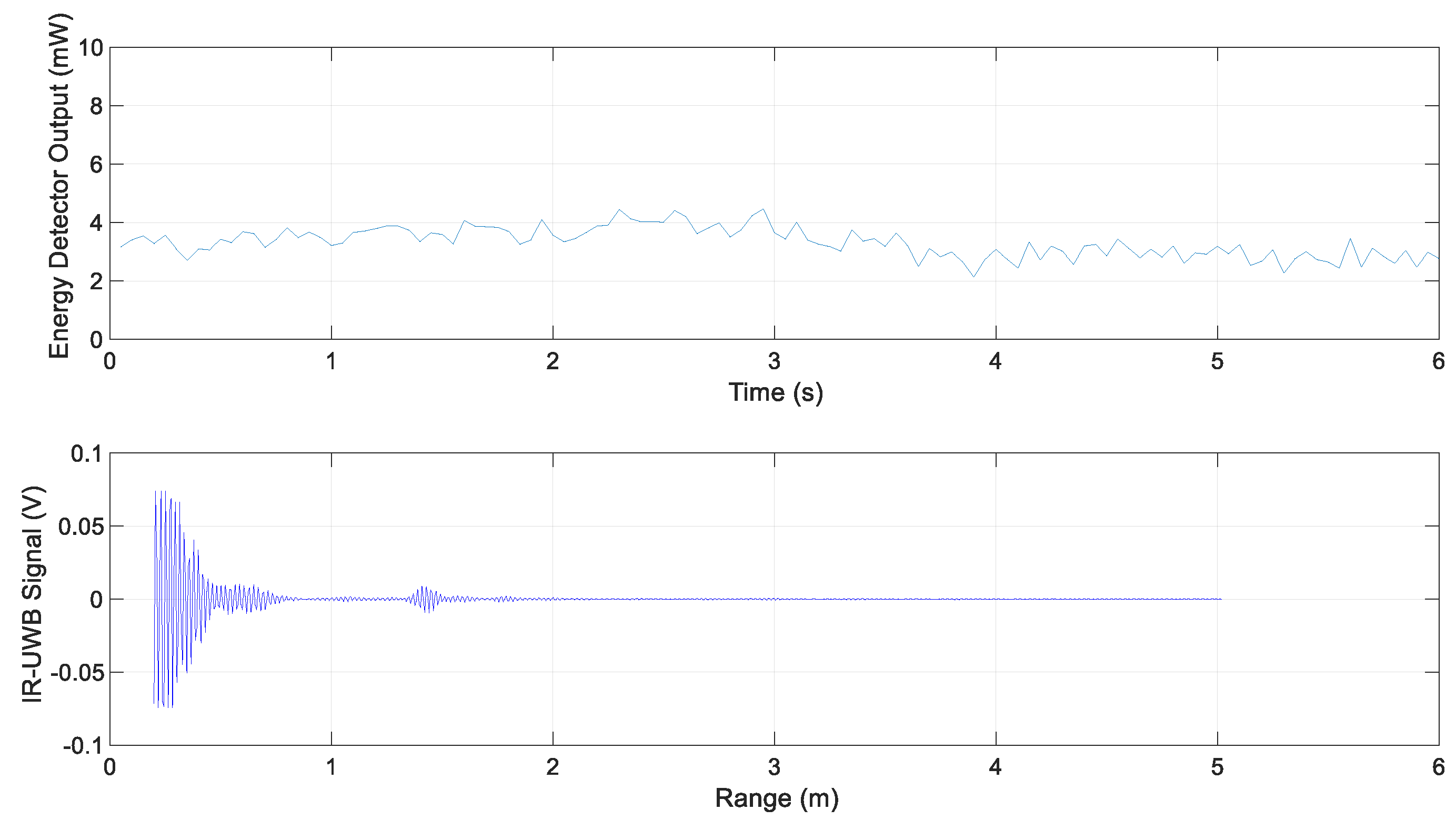
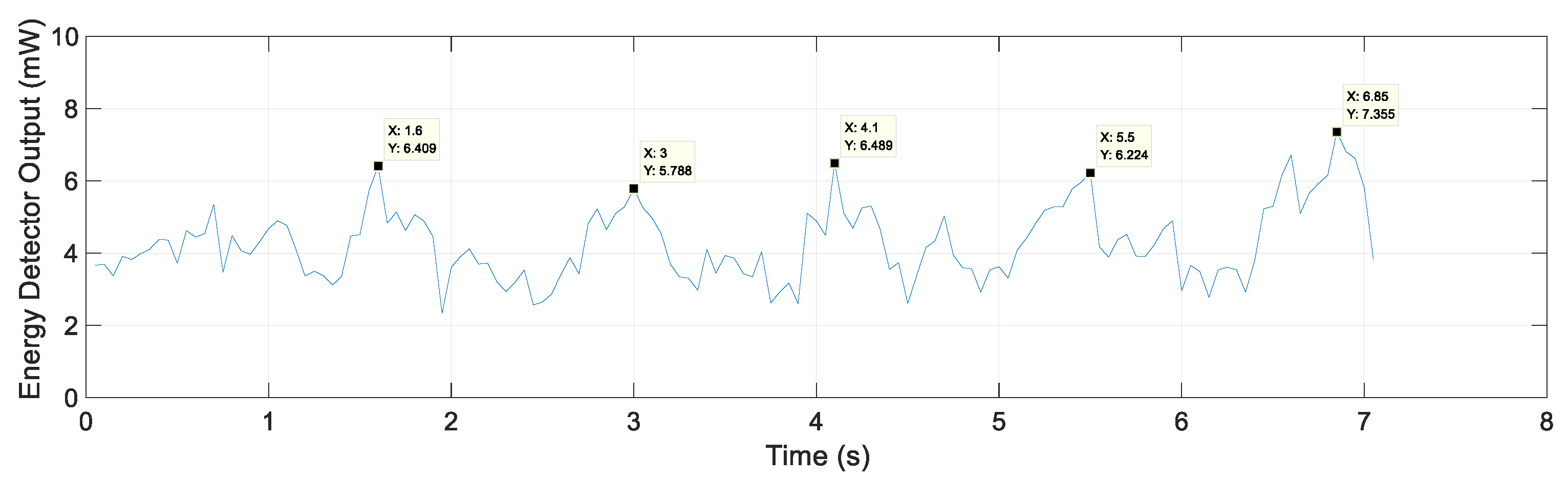
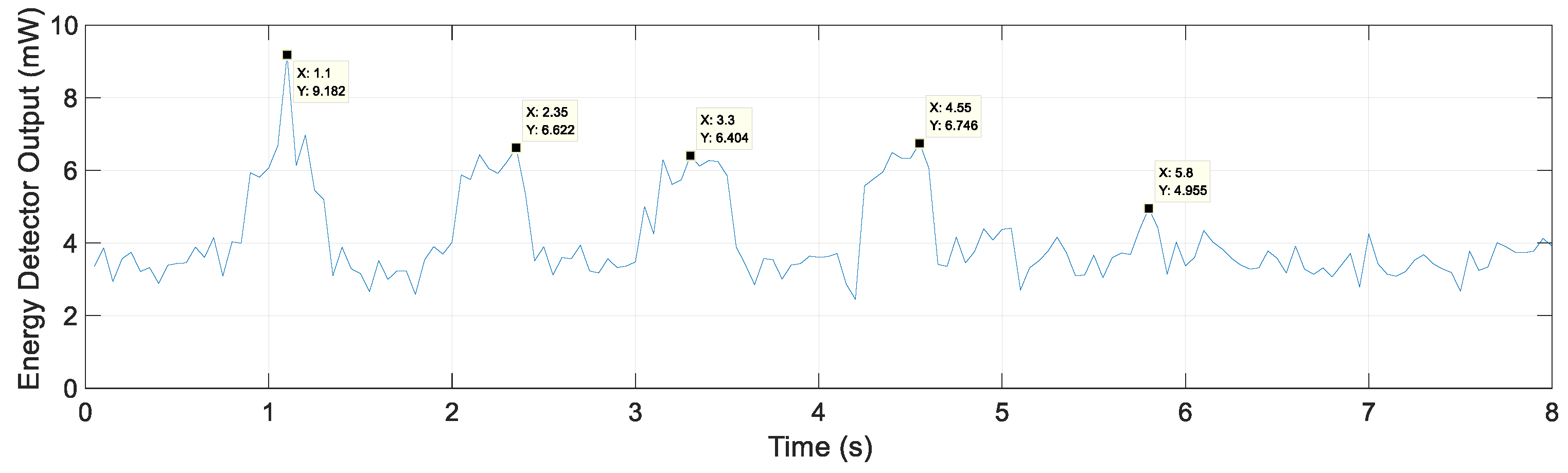
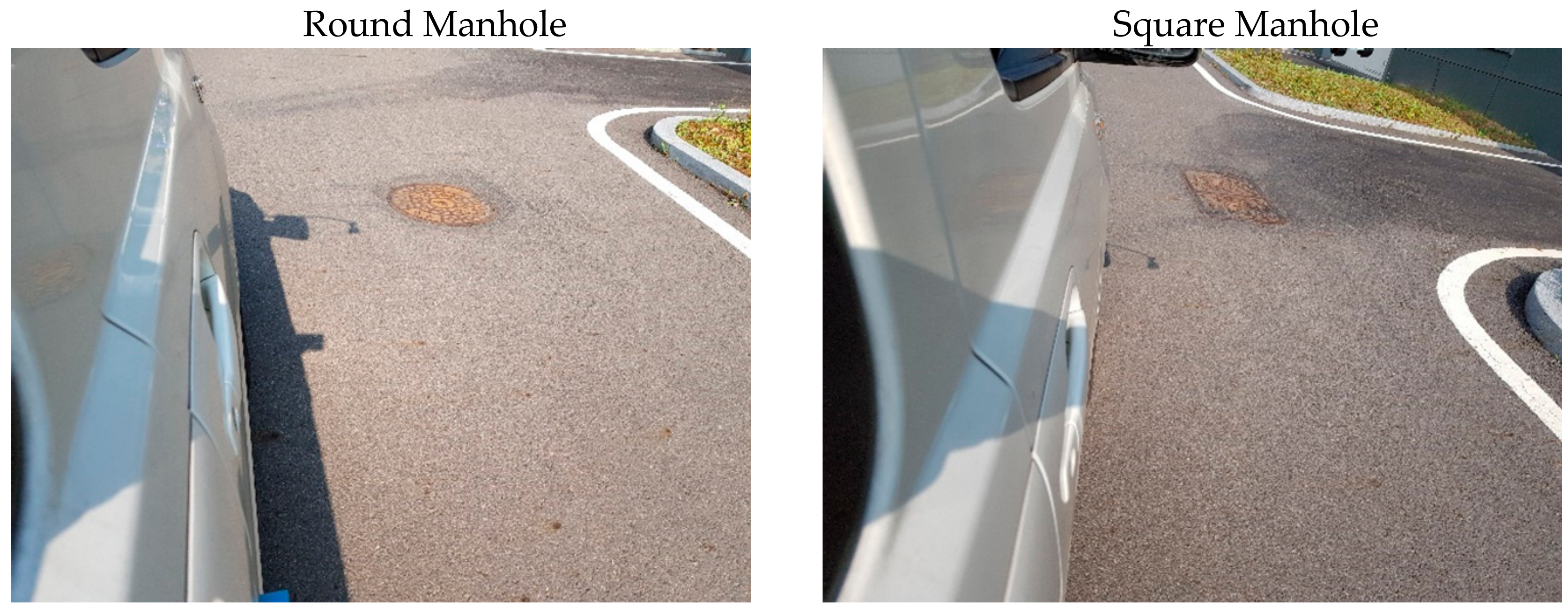
4. Experimental Results
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Cheng, W.C. PSO algorithm particle filters for improving the performance of lane detection and tracking systems in difficult roads. Sensors 2012, 12, 17168–17185. [Google Scholar] [CrossRef] [PubMed]
- Hoang, T.M.; Hong, H.G.; Vokhidov, H.; Park, K.R. Road lane detection by discriminating dashed and solid road lanes using a visible light camera sensor. Sensors 2016, 16, 1313. [Google Scholar] [CrossRef] [PubMed]
- Hoang, T.M.; Baek, N.R.; Cho, S.W.; Kim, K.W.; Park, K.R. Road lane detection robust to shadows based on a fuzzy system using a visible light camera sensor. Sensors 2017, 17, 2475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tapia-Espinoza, R.; Torres-Torriti, M. Robust lane sensing and departure warning under shadows and occlusions. Sensors 2013, 13, 3270–3298. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.B.; Wang, L.H.; Wang, K.C. Ultra-low complexity block-based lane detection and departure warning system. IEEE Trans. Circuits Syst. Video Technol. 2019, 29, 582–593. [Google Scholar] [CrossRef]
- Li, Q.; Zhou, J.; Li, B.; Guo, Y.; Xiao, J. Robust lane-detection method for low-speed environments. Sensors 2018, 18, 4274. [Google Scholar] [CrossRef] [Green Version]
- Son, J.; Yoo, H.; Kim, S.; Sohn, K. Real-time illumination invariant lane detection for lane departure warning system. Expert Syst. Appl. 2015, 42, 1816–1824. [Google Scholar] [CrossRef]
- Jung, H.; Min, J.; Kim, J. An efficient lane detection algorithm for lane departure detection. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, Australia, 23–26 June 2013; pp. 976–981. [Google Scholar]
- Jung, J.; Bae, S.H. Real-time road lane detection in urban areas using LiDAR data. Electronics 2018, 7, 276. [Google Scholar] [CrossRef] [Green Version]
- Hata, A.; Wolf, D. Road marking detection using LIDAR reflective intensity data and its application to vehicle localization. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 584–589. [Google Scholar]
- Kammel, S.; Pitzer, B. Lidar-based lane marker detection and mapping. In Proceedings of the IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 1137–1142. [Google Scholar]
- Clarke, D.; Andre, D.; Zhang, F. Synthetic aperture radar for lane boundary detection in driver assistance systems. In Proceedings of the IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Baden-Baden, Germany, 19–21 September 2017; pp. 238–243. [Google Scholar]
- Stolz, M.; Feng, Z.; Kunert, M.; Wiesbeck, W.; Li, M. Lane detection with a high-resolution automotive radar by introducing a new type of road marking. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2430–2447. [Google Scholar]
- Taylor, J. Ultra-Wideband Radar Technology, 1st ed.; CRC Press: Boca Raton, FL, USA, 2001; ISBN 0849342678. [Google Scholar]
- Rana, S.; Dey, M.; Ghavami, M.; Dudley, S. Signature inspired home environments monitoring system using IR-UWB technology. Sensors 2019, 19, 385. [Google Scholar] [CrossRef] [Green Version]
- Sabushimike, D.; Na, S.; Kim, J.; Bui, N.; Seo, K.; Kim, G. Low-rank matrix recovery approach for clutter rejection in real-time IR-UWB radar-based moving target detection. Sensors 2016, 16, 1409. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nguyen, V.H.; Pyun, J.Y. Location detection and tracking of moving targets by a 2D IR-UWB radar system. Sensors 2015, 15, 6740–6762. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- SangHyun, C.; Wolf, M.; Burdick, J.W. Human detection and tracking via Ultra-Wideband (UWB) radar. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010; pp. 452–457. [Google Scholar]
- Nezirovic, A.; Yarovoy, A.G.; Ligthart, L.P. Signal processing for improved detection of trapped victims using UWB radar. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2005–2014. [Google Scholar] [CrossRef]
- Chang, S.; Sharan, R.; Wolf, M.; Mitsumoto, N.; Burdick, J.W. UWB radar-based human target tracking. In Proceedings of the 2009 IEEE Radar Conference, Pasadena, CA, USA, 4–8 May 2009; pp. 1–6. [Google Scholar]
- Choi, J.W.; Quan, X.; Cho, S.H. Bi-directional passing people counting system based on IR-UWB radar sensors. IEEE Internet Things J. 2018, 5, 512–522. [Google Scholar] [CrossRef]
- Liang, F.; Qi, F.; An, Q.; Lv, H.; Chen, F.; Li, Z.; Wang, J. Detection of multiple stationary humans using UWB MIMO radar. Sensors 2016, 16, 1922. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, J.W.; Nam, S.S.; Cho, S.H. Multi-human detection algorithm based on an impulse radio ultra-wideband radars. IEEE Access 2016, 4, 10300–10309. [Google Scholar] [CrossRef]
- Jiang, L.; Zhou, X.; Che, L.; Rong, S.; Wen, H. Feature extraction and reconstruction by using 2D-VMD based on carrier-free UWB radar application in human motion recognition. Sensors 2019, 19, 1962. [Google Scholar] [CrossRef] [Green Version]
- Yim, D.; Lee, W.H.; Kim, J.I.; Kim, K.; Ahn, D.H.; Lim, Y.H.; Cho, S.H.; Park, H.K.; Cho, S.H. Quantified activity measurement for medical use in movement disorders through IR-UWB radar sensor. Sensors 2019, 19, 688. [Google Scholar] [CrossRef] [Green Version]
- Ghaffar, A.; Khan, F.; Cho, S.H. Hand pointing gestures based digital menu board implementation using IR-UWB transceivers. IEEE Access 2019, 7, 58148–58157. [Google Scholar] [CrossRef]
- Khan, F.; Leem, S.; Cho, S.H. Hand-based gesture recognition for vehicular applications using IR-UWB radar. Sensors 2017, 17, 833. [Google Scholar] [CrossRef]
- Shin, Y.H.; Seo, J. Towards contactless silent speech recognition based on detection of active and visible articulators using IR-UWB radar. Sensors 2016, 16, 1812. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yin, W.; Yang, X.; Li, L.; Zhang, L.; Kitsuwan, N.; Oki, E. HEAR: Approach for heartbeat monitoring with body movement compensation by IR-UWB radar. Sensors 2018, 18, 3077. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khan, F.; Cho, S.H. A detailed algorithm for vital sign monitoring of a stationary/non-stationary human through IR-UWB radar. Sensors 2017, 17, 290. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Leem, S.K.; Khan, F.; Cho, S.H. Vital sign monitoring and mobile phone usage detection using IR-UWB radar for intended use in car crash prevention. Sensors 2017, 17, 1240. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Wang, Y.; Wu, S.; Gulliver, T.A. Experimental study of wireless monitoring of human respiratory movements using UWB impulse radar systems. Sensors 2018, 18, 3065. [Google Scholar] [CrossRef] [Green Version]
- Pittella, E.; Pisa, S.; Cavagnaro, M. Breath activity monitoring with wearable UWB radars: Measurement and analysis of the pulses reflected by the human body. IEEE Trans. Biomed. Eng. 2016, 63, 1447–1454. [Google Scholar] [CrossRef]
- Schires, E.; Georgiou, P.; Lande, T.S. Vital sign monitoring through the back using an UWB impulse radar with body coupled antennas. IEEE Trans. Biomed. Circuits Syst. 2018, 12, 292–302. [Google Scholar] [CrossRef]
- Fathy, A.E.; Koo, Y.S.; Liu, Q.; Ren, L.; Wang, H.; Wang, Y. Noncontact multiple heartbeats detection and subject localization using UWB impulse Doppler radar. IEEE Microw. Wirel. Compon. Lett. 2015, 25, 690–692. [Google Scholar]
- Liu, L.; Liu, Z.; Barrowes, B.E. Through-wall bio-radiolocation with UWB impulse radar: Observation, simulation and signal extraction. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 4, 791–798. [Google Scholar] [CrossRef]
- Duan, Z.; Liang, J. Non-contact detection of vital signs using a UWB radar sensor. IEEE Access 2019, 7, 36888–36895. [Google Scholar] [CrossRef]
- Nguyen, V.; Weitnauer, A.M.A. Denoised maximum likelihood estimation of chest wall displacement from the IR-UWB spectrum. IEEE Access 2018, 6, 15249–15258. [Google Scholar] [CrossRef]
- Yin, W.; Yang, X.; Zhang, L.; Oki, E. ECG monitoring system integrated with IR-UWB radar based on CNN. IEEE Access 2016, 4, 6344–6351. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metal Lane Numbers | 1–2 | 2–3 | 3–4 | 4–5 |
|---|---|---|---|---|
| Travel Time (s) | 1.1 | 1 | 0.95 | 1.1 |
| Vehicle Speed (m/s) | 7.22 | 7.78 | 8.33 | 7.5 |
| Estimated Lane Spacing (m) | 7.94 | 7.78 | 7.91 | 8.25 |
| Metal Lane Numbers | 1–2 | 2–3 | 3–4 | 4–5 |
|---|---|---|---|---|
| Travel Time (s) | 1.4 | 1.1 | 1.4 | 1.35 |
| Vehicle Speed (m/s) | 5.83 | 6.39 | 5.83 | 5.83 |
| Estimated Lane Spacing (m) | 8.16 | 7.03 | 8.16 | 7.87 |
| Metal Lane Numbers | 1–2 | 2–3 | 3–4 | 4–5 |
|---|---|---|---|---|
| Travel Time (s) | 1.3 | 1 | 1 | 1.15 |
| Vehicle Speed (m/s) | 7.22 | 7.78 | 7.78 | 7.5 |
| Estimated Lane Spacing (m) | 9.39 | 7.78 | 7.78 | 8.63 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.-H. Lane Detection Method with Impulse Radio Ultra-Wideband Radar and Metal Lane Reflectors. Sensors 2020, 20, 324. https://doi.org/10.3390/s20010324
Kim D-H. Lane Detection Method with Impulse Radio Ultra-Wideband Radar and Metal Lane Reflectors. Sensors. 2020; 20(1):324. https://doi.org/10.3390/s20010324
Chicago/Turabian StyleKim, Dae-Hyun. 2020. "Lane Detection Method with Impulse Radio Ultra-Wideband Radar and Metal Lane Reflectors" Sensors 20, no. 1: 324. https://doi.org/10.3390/s20010324
APA StyleKim, D.-H. (2020). Lane Detection Method with Impulse Radio Ultra-Wideband Radar and Metal Lane Reflectors. Sensors, 20(1), 324. https://doi.org/10.3390/s20010324