Design of a Tri-Axial Surface Micromachined MEMS Vibrating Gyroscope



Abstract
:1. Introduction
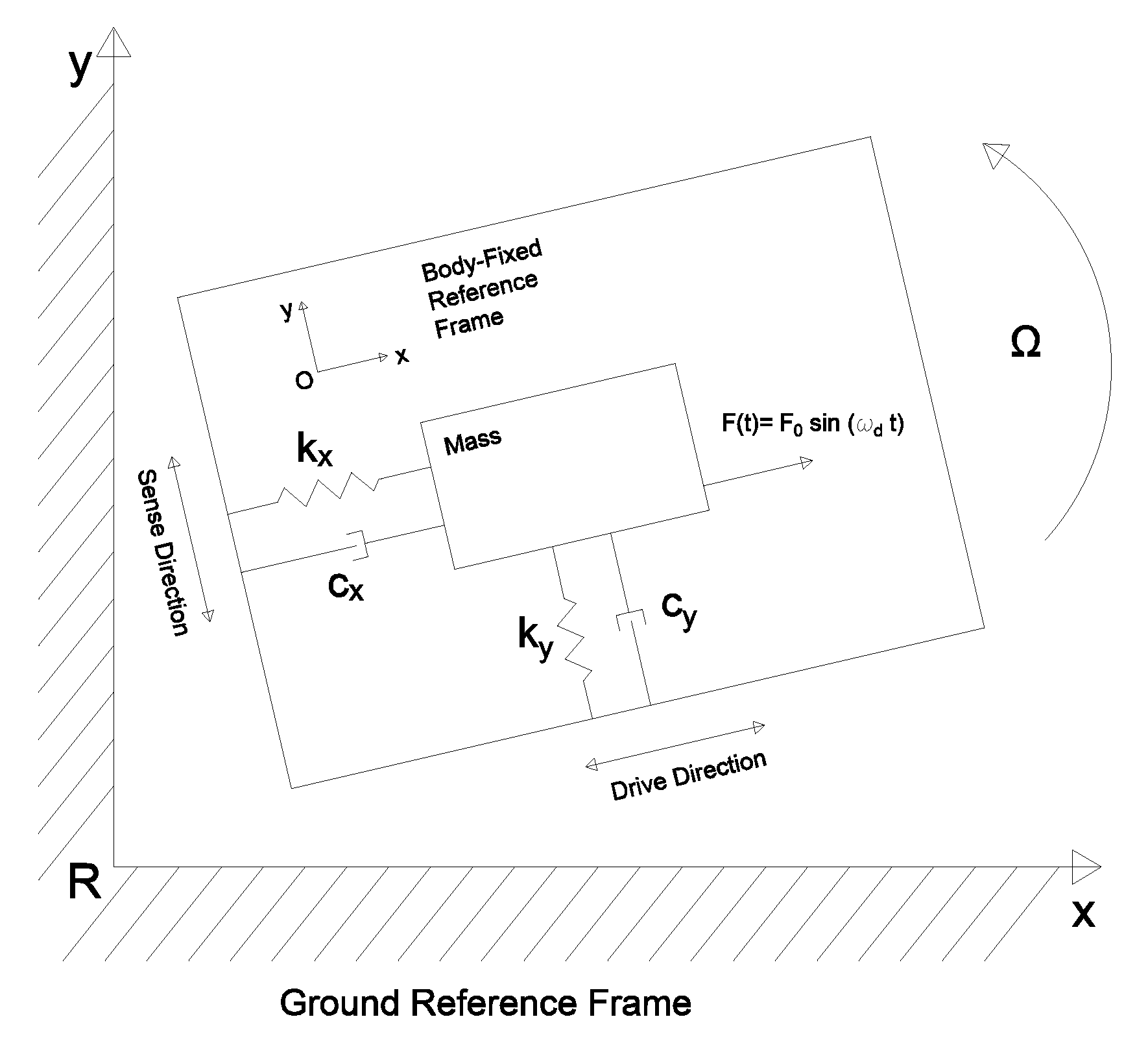
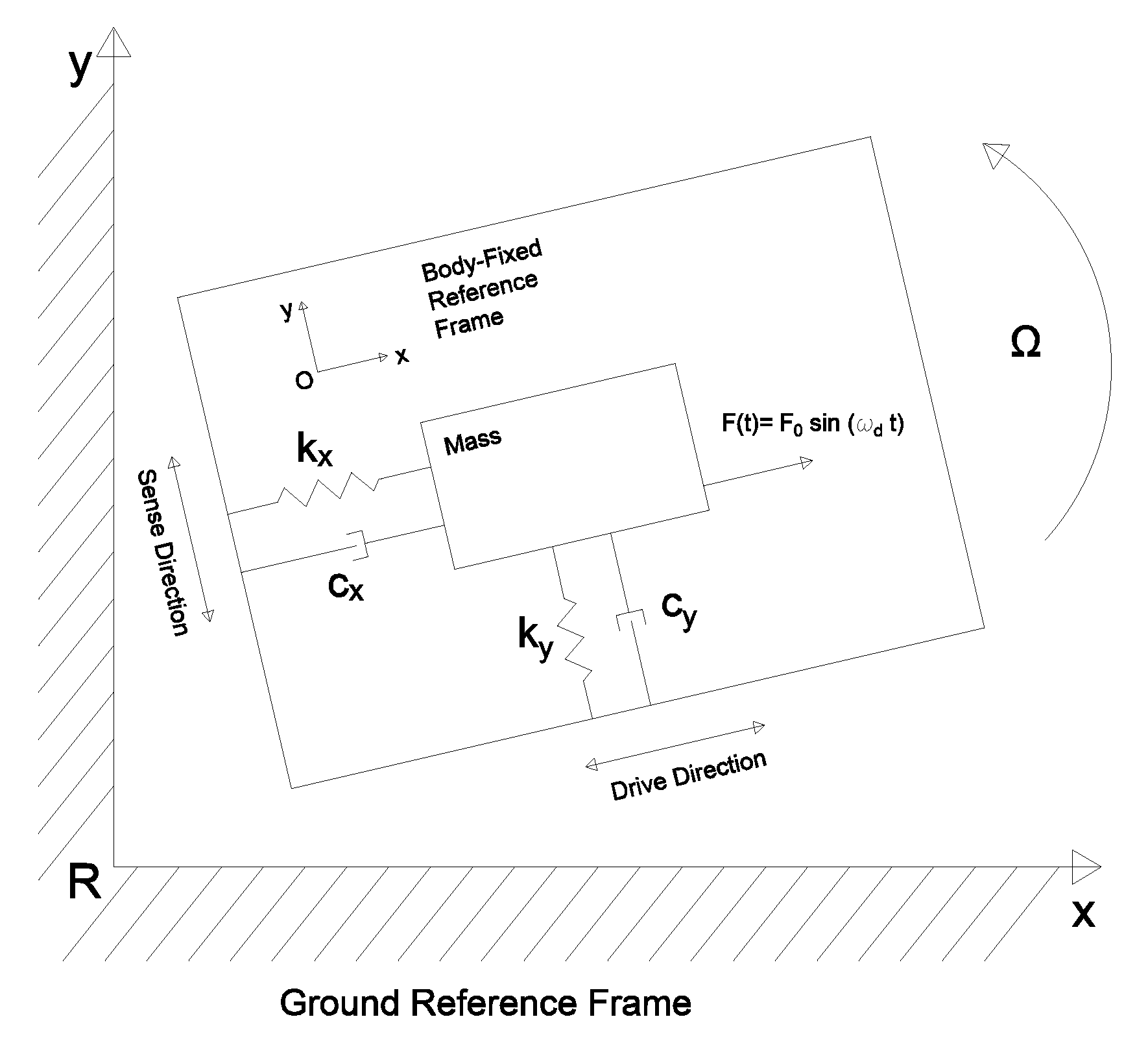
2. Gyroscope Fundamentals
- The drive-masses () providing structural support to the sensor. Drive-masses account for the main contribution to the resonance frequency. Drive-masses excitation occurs by an electrostatic actuation. Drive-masses displacement () is called drive-mode.
- The sense-masses () detecting the Coriolis force. Indeed, the displacement of the sense-masses () is called sense-mode and it is proportional to the magnitude of the force acting on them.
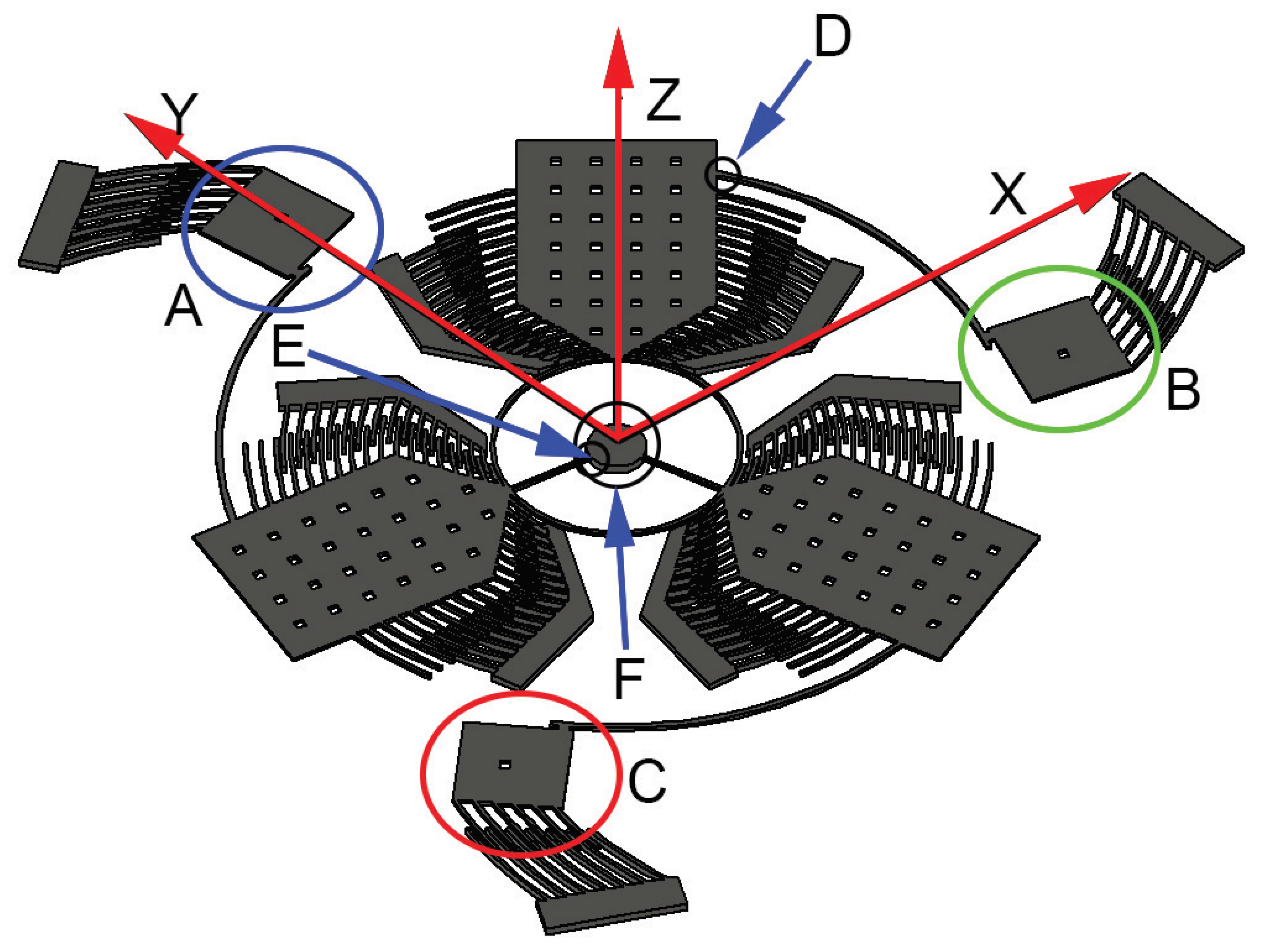
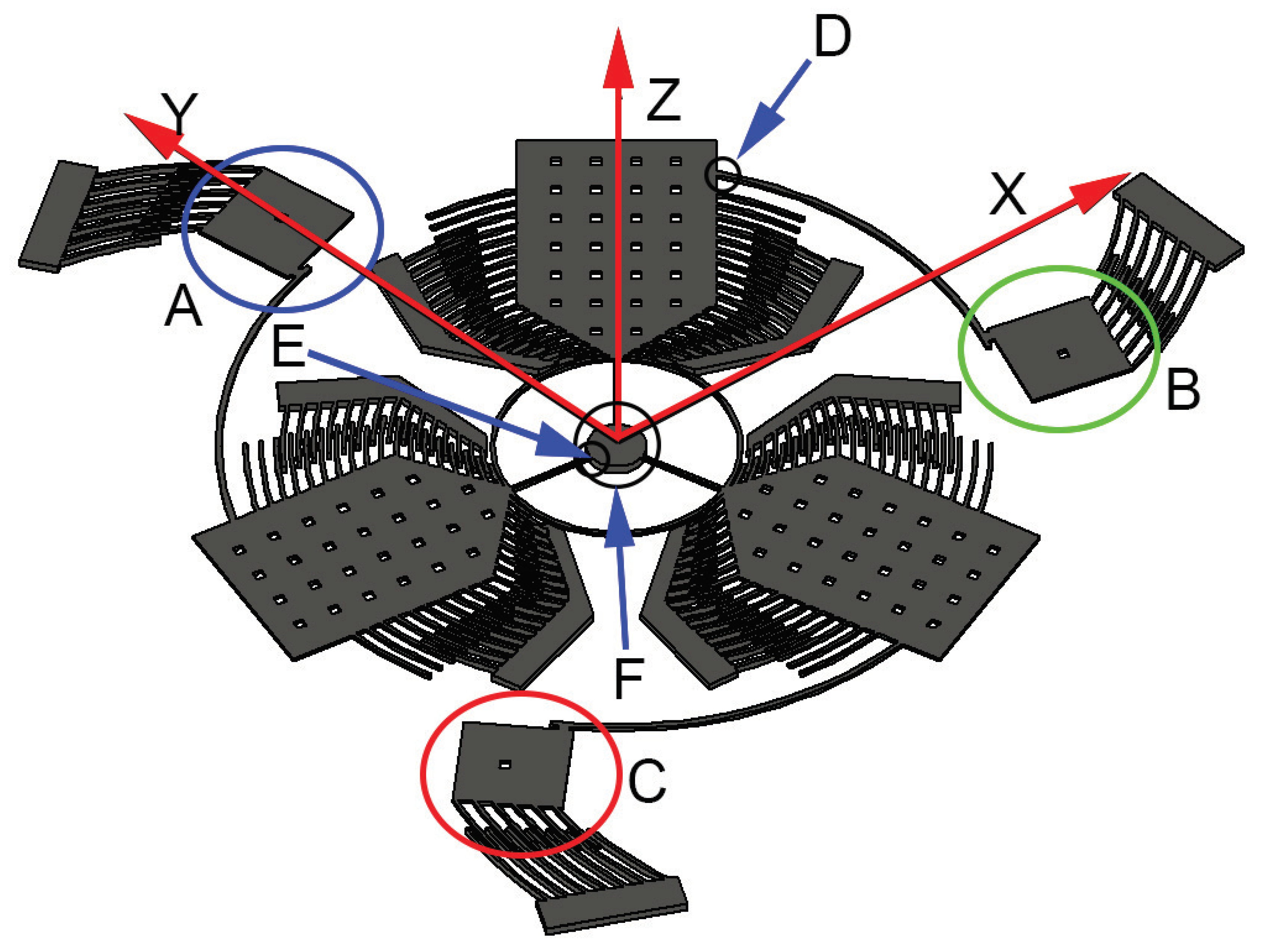
3. System Description
- When the angular velocity is oriented along the z-axis a rotation about the joint between the sense and the drive mass arises. Since the measurement is carried out through comb-fingers, matched modes are mandatory to obtain a significant signal boost.
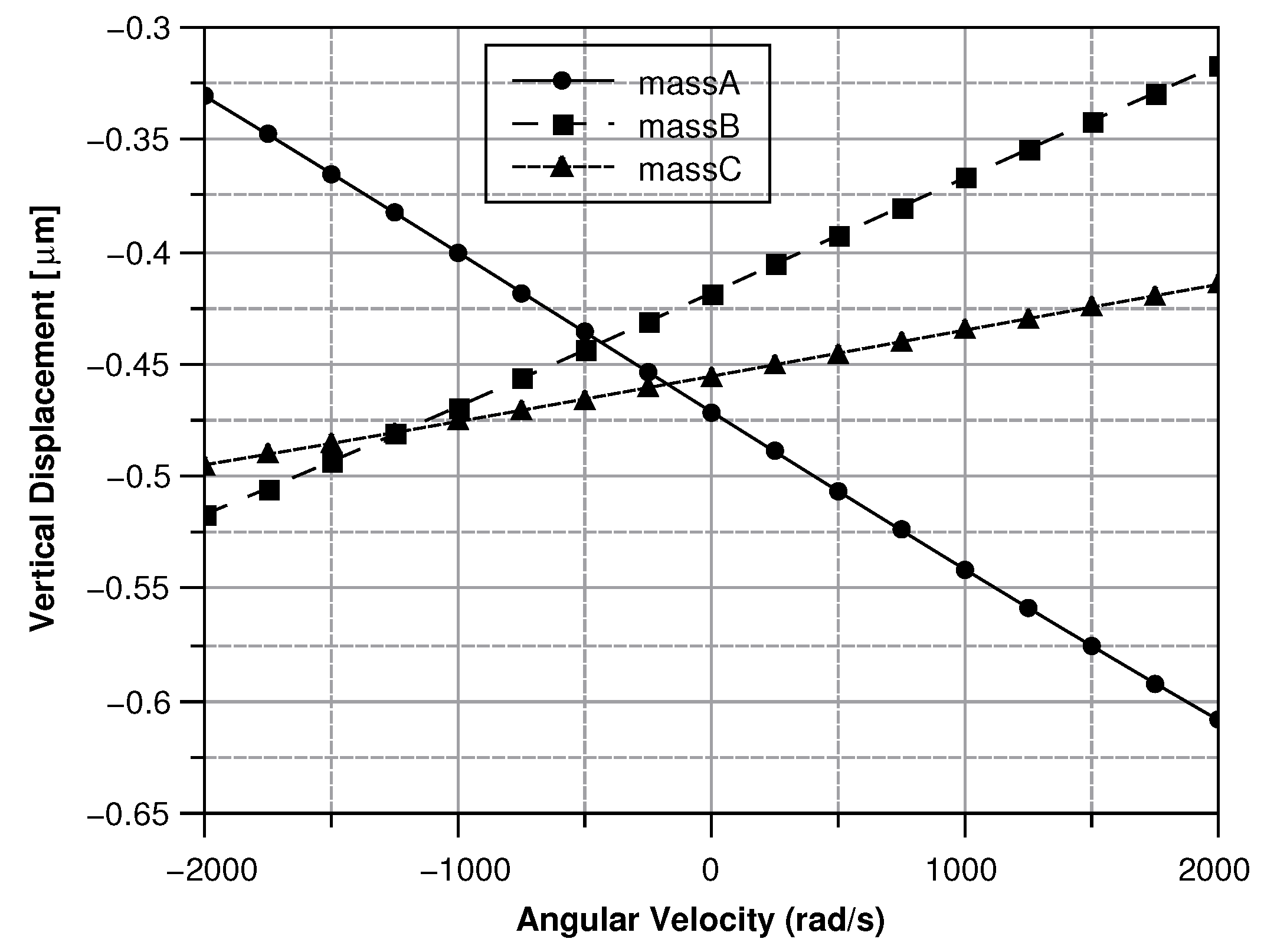
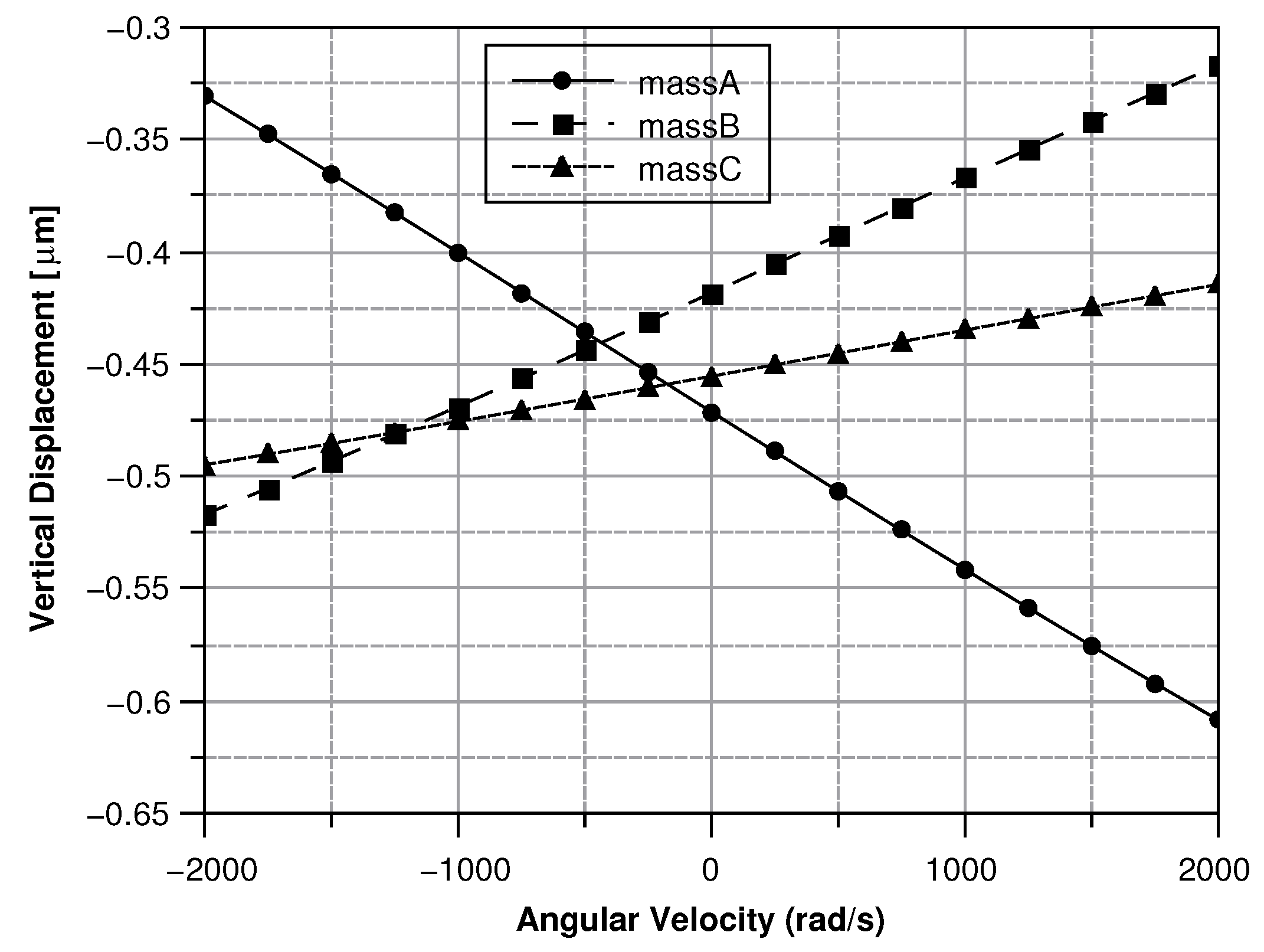
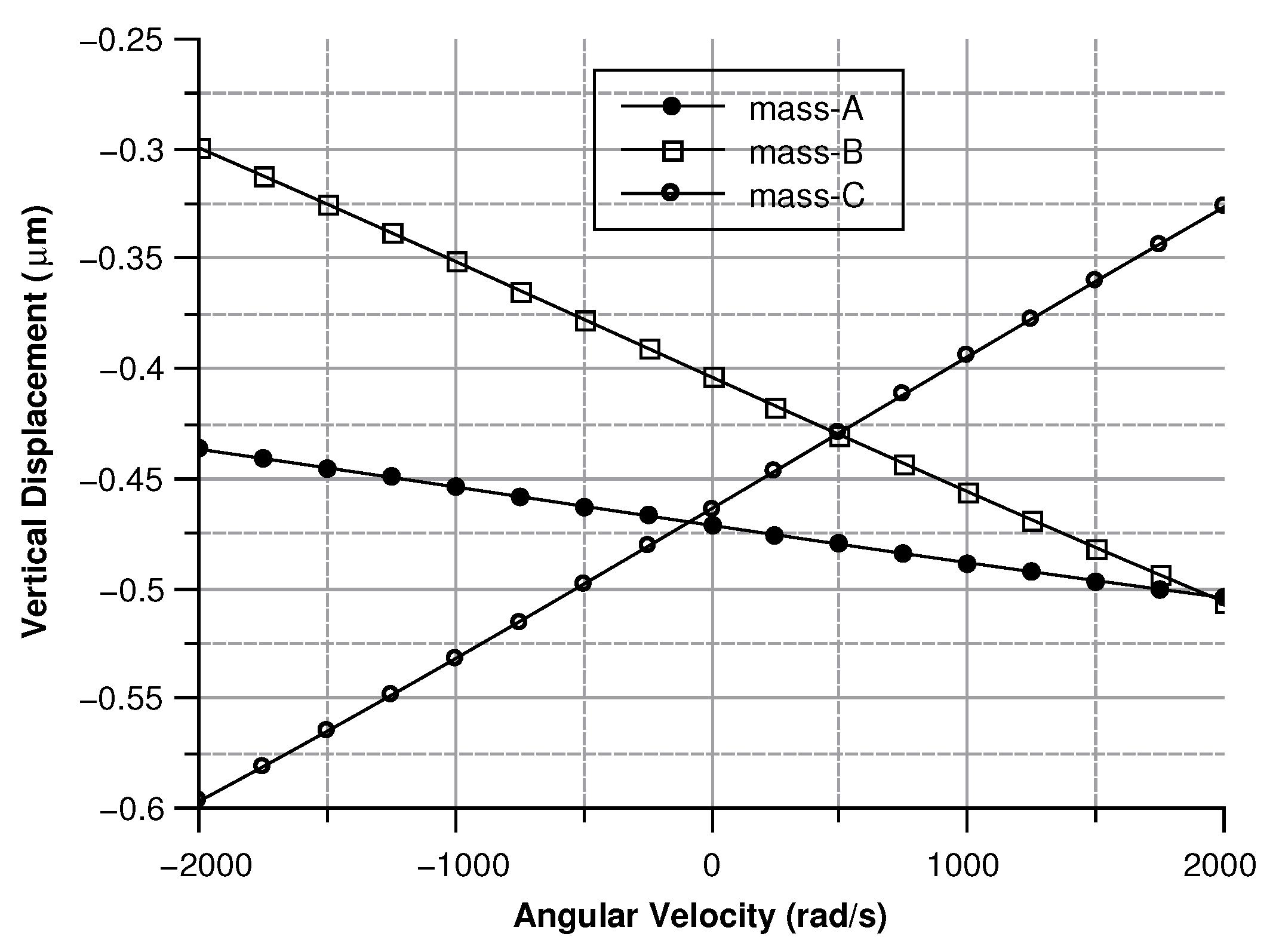
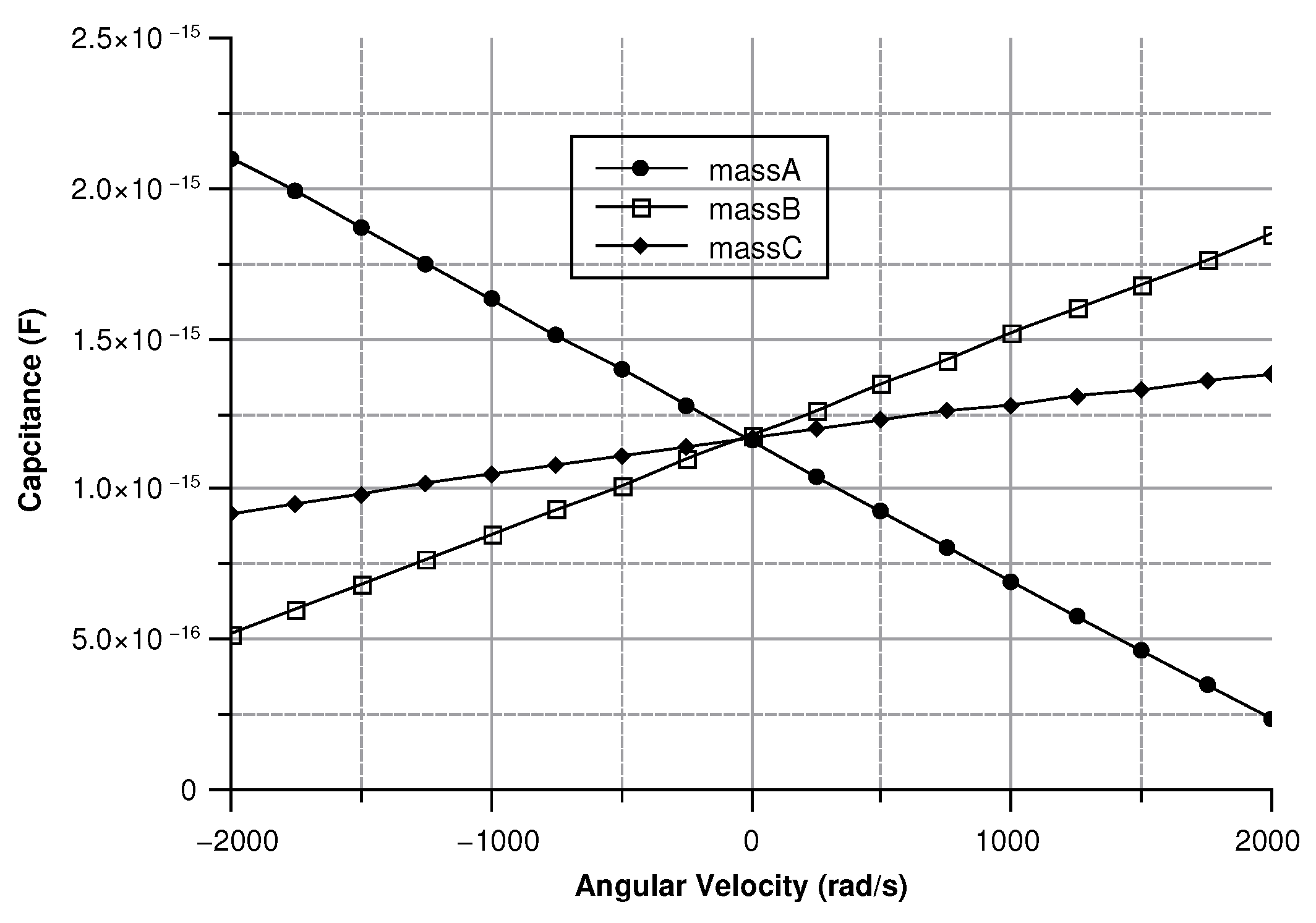
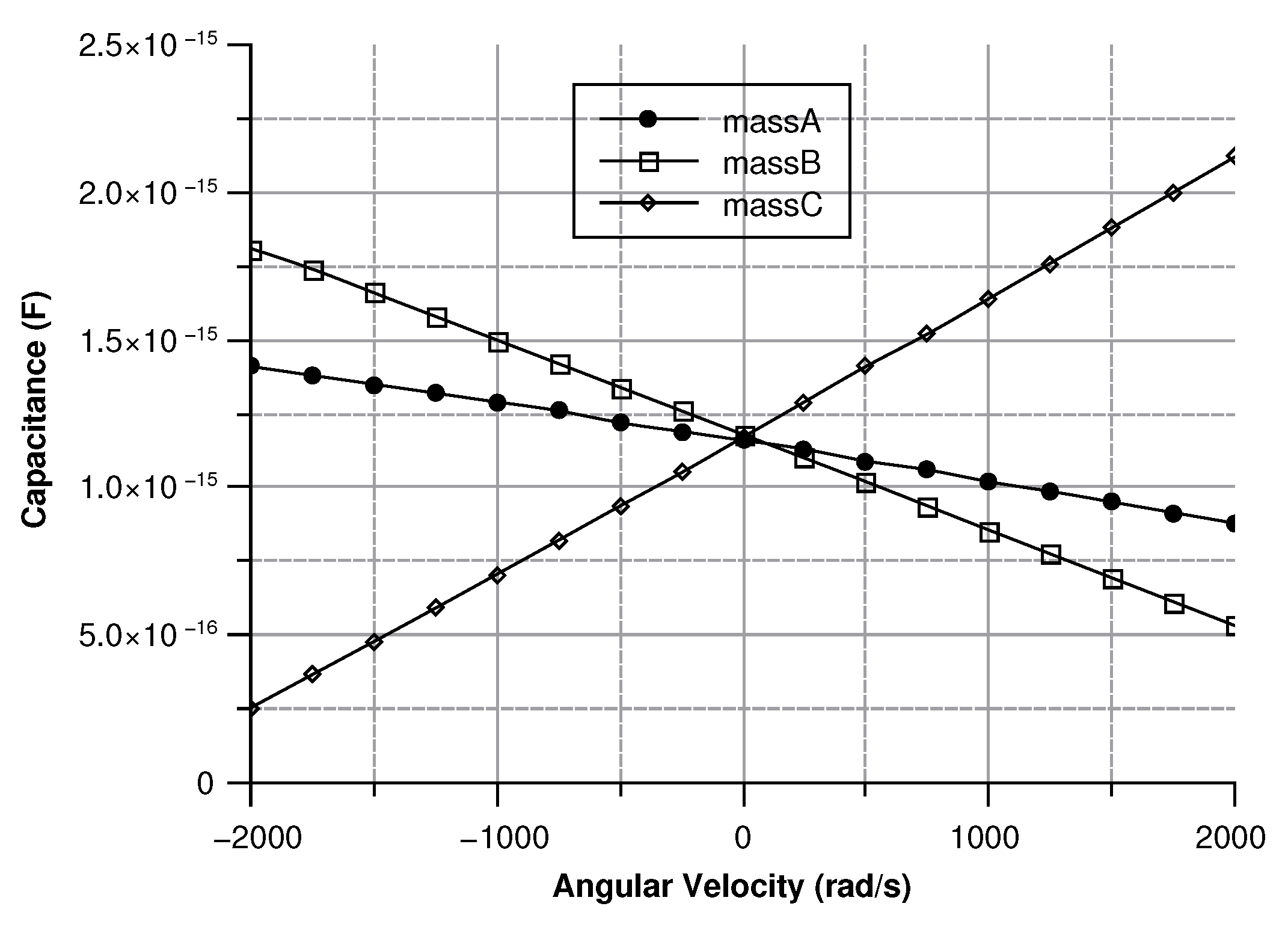
- A vertical displacement appears for angular velocities along the y or the x axes. The mass exhibiting the maximum displacement among the three reveals the direction of the rotation. In addition, the direction of the angular velocity can be inferred from the upward or downward displacement of the other two masses. Separated modes are exploited to avoid collision between the masses and the silicon substrate.
4. Numerical Modeling of the Structure
- drive-masses
- cantilever-springs
- sense-masses
- torsional spring
4.1. First Guess Solution
- The link between the sense-masses and the drive masses is perfectly rigid. The same condition holds for the silicon substrate-gyroscope connection.
- The moment of inertia of smaller parts is immaterial.
- The bores of the drive and sense masses are not taken into account.
4.1.1. First Design of the Drive Mass
4.1.2. First Design of the Sense Masses
4.2. Iterative Design
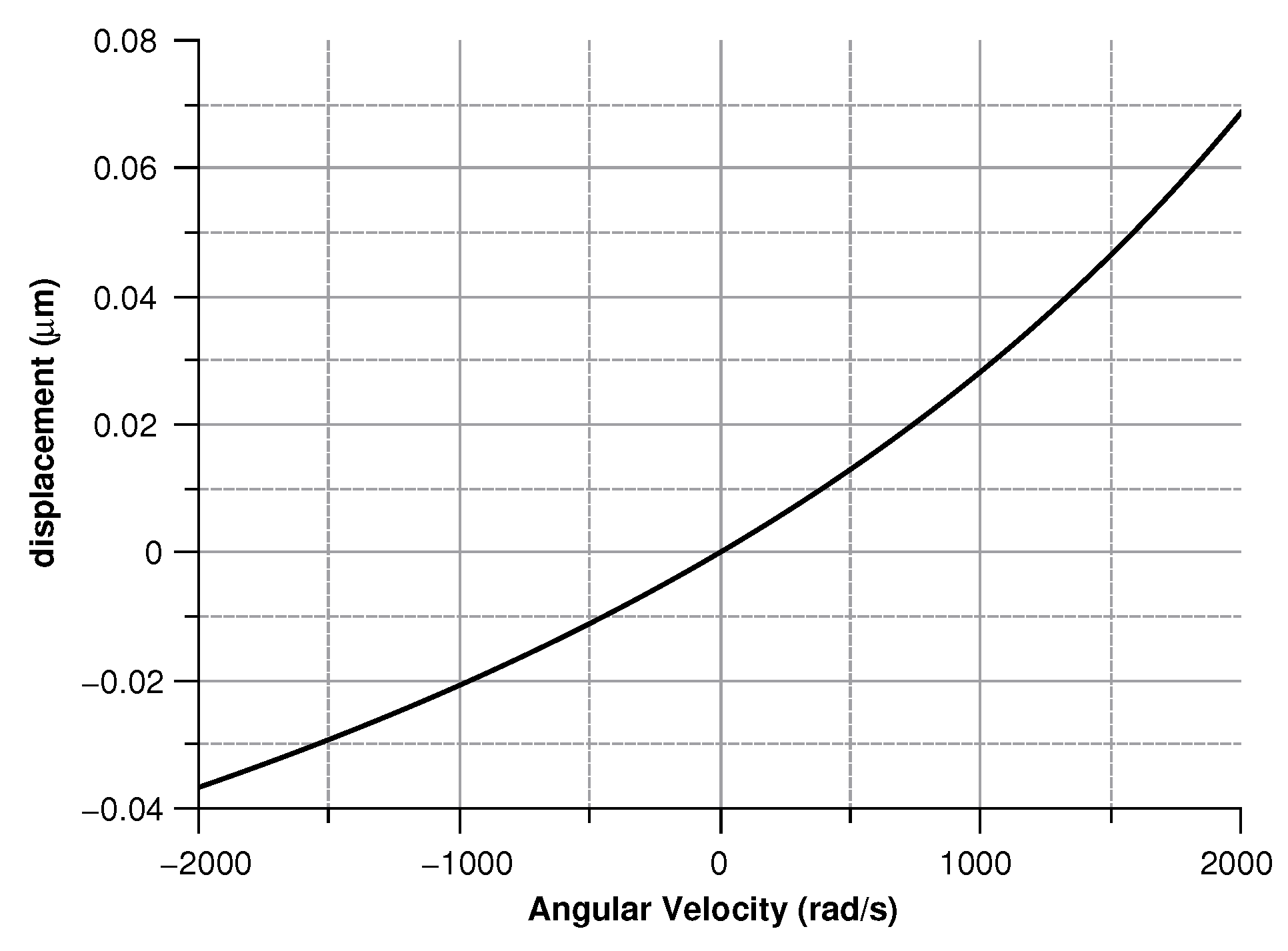
- The out of plane displacement should not exceed 1 m.
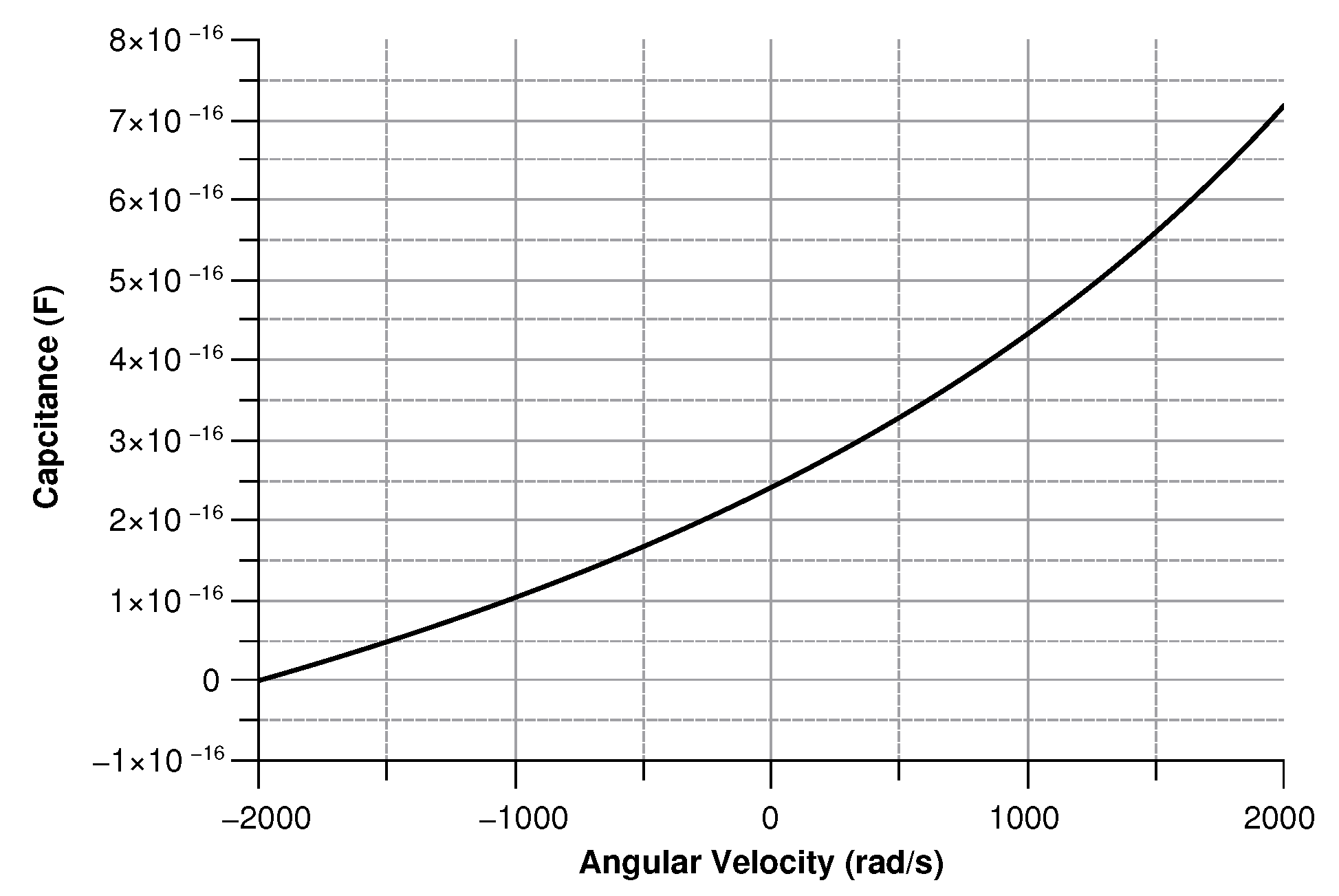
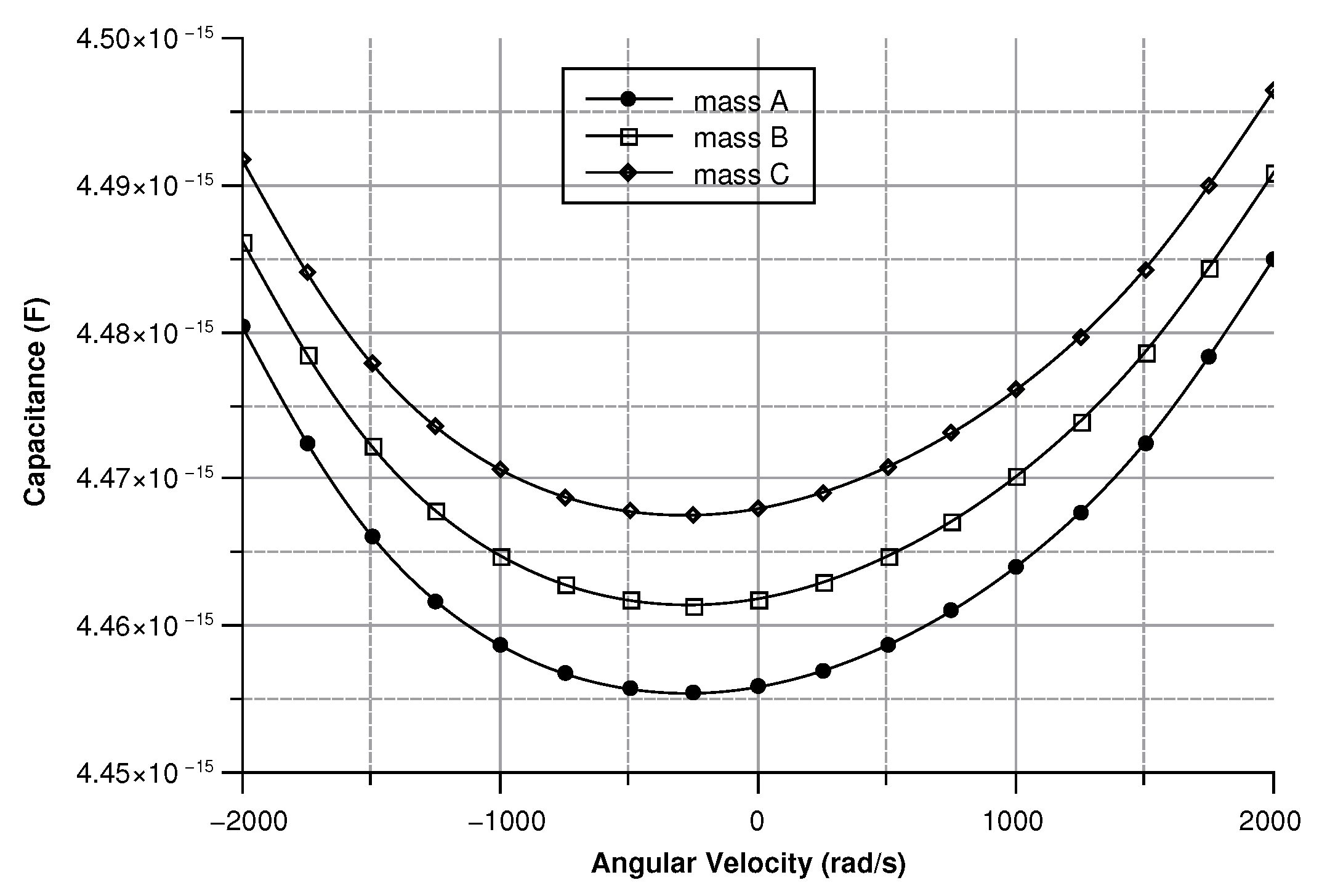
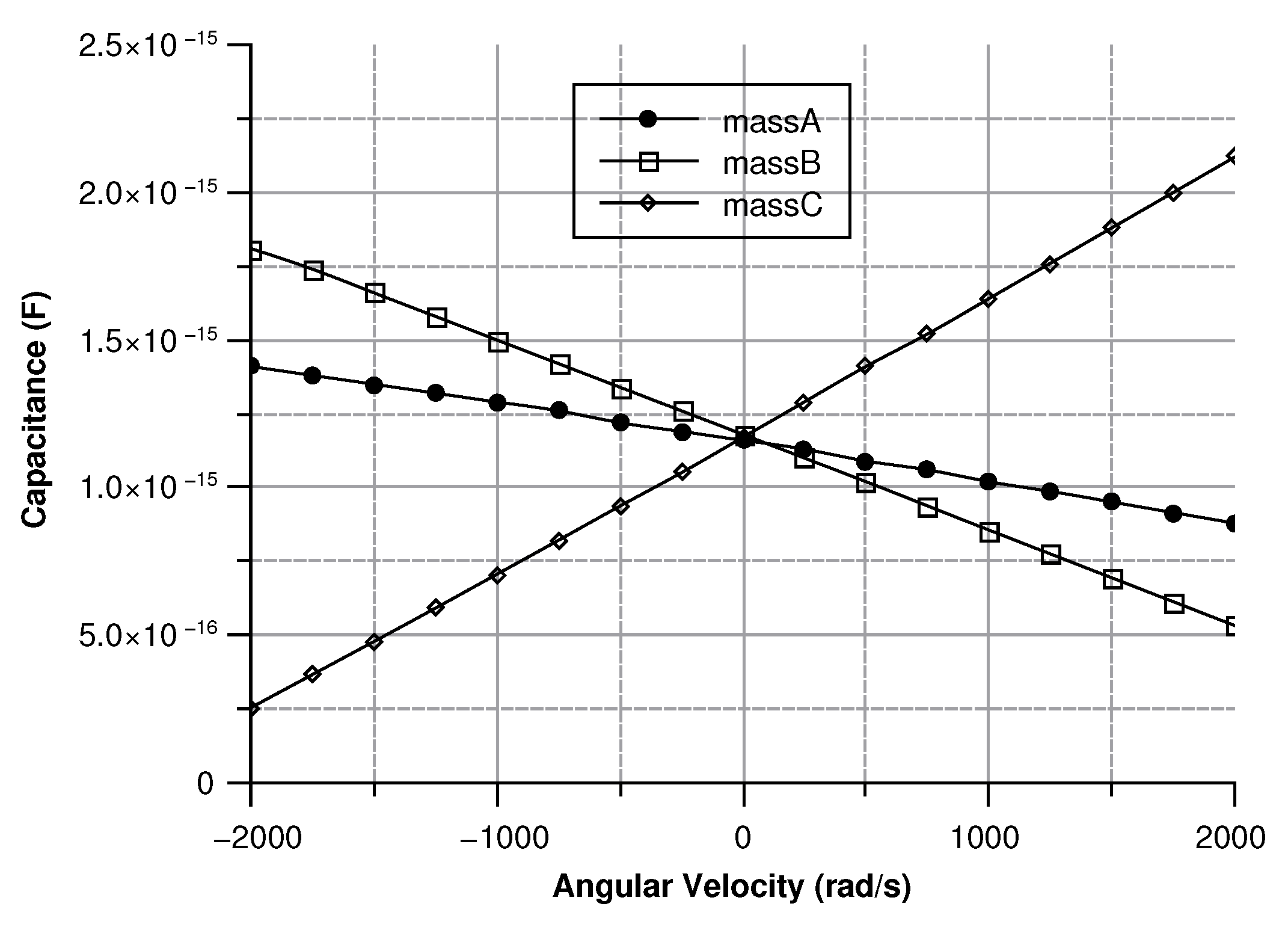
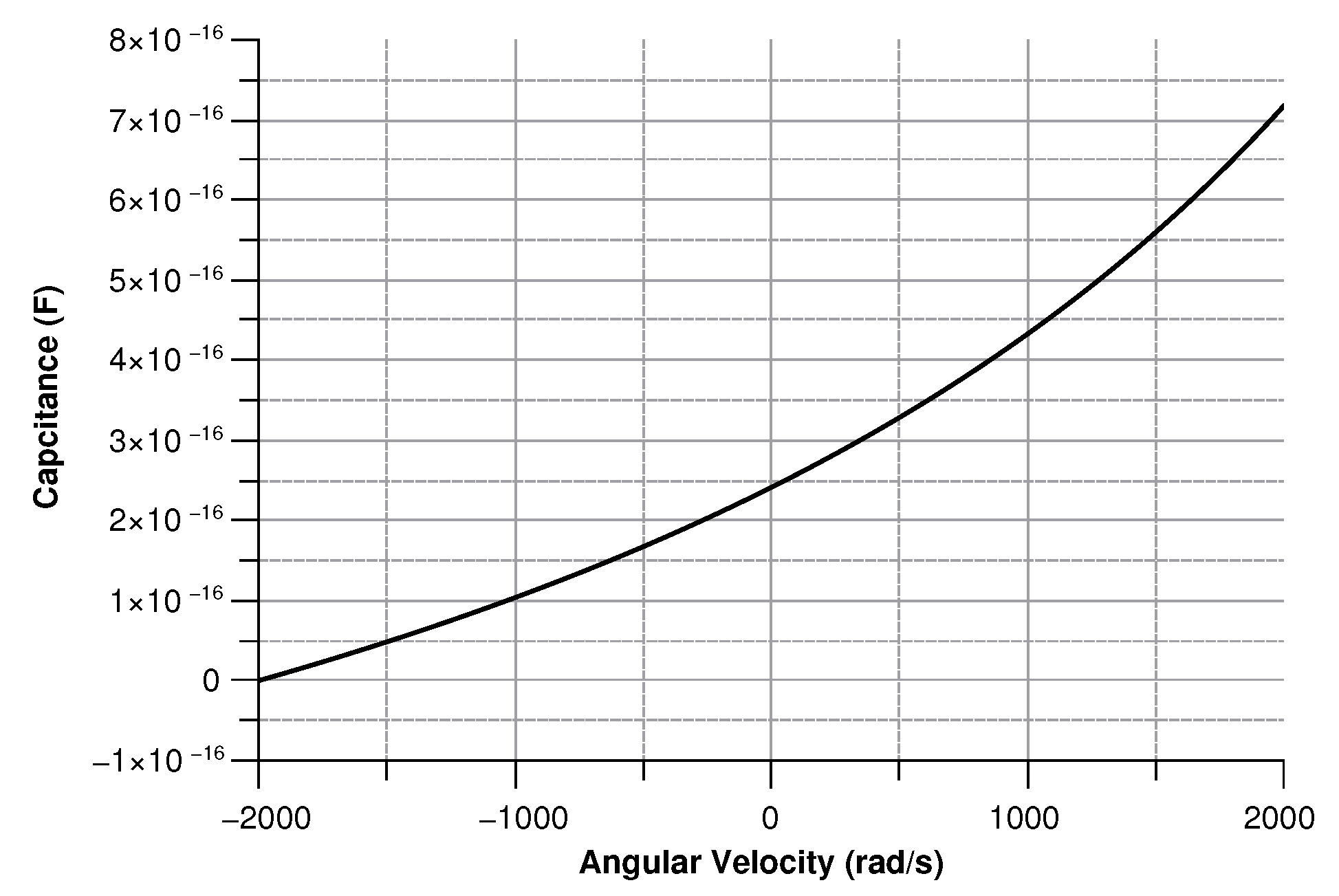
- The capacitance variation between the sense masses and the ground should be over 1 aF in order to make the measurement feasible.
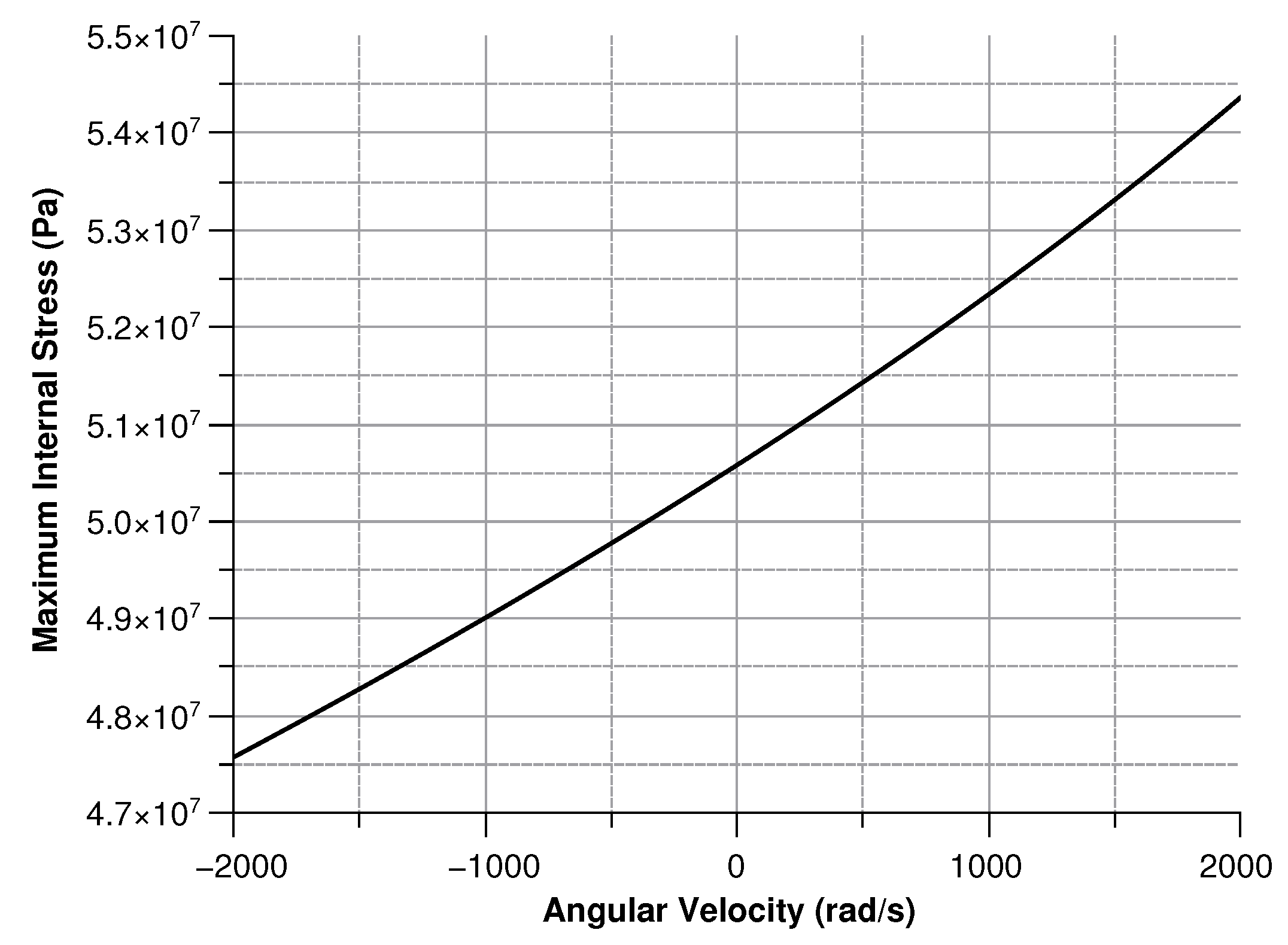
- A safety factor greater than five should be set to prove the resistance of the structure. The safety factor is defined as the ratio between the calculated stress of the structure and the maximum bearable stress of the material.
- The inertia of the sense masses and their contribution to the resonant were also considered in the resonant frequency formula.
- The inertia of the triangular connector was also taken into account.
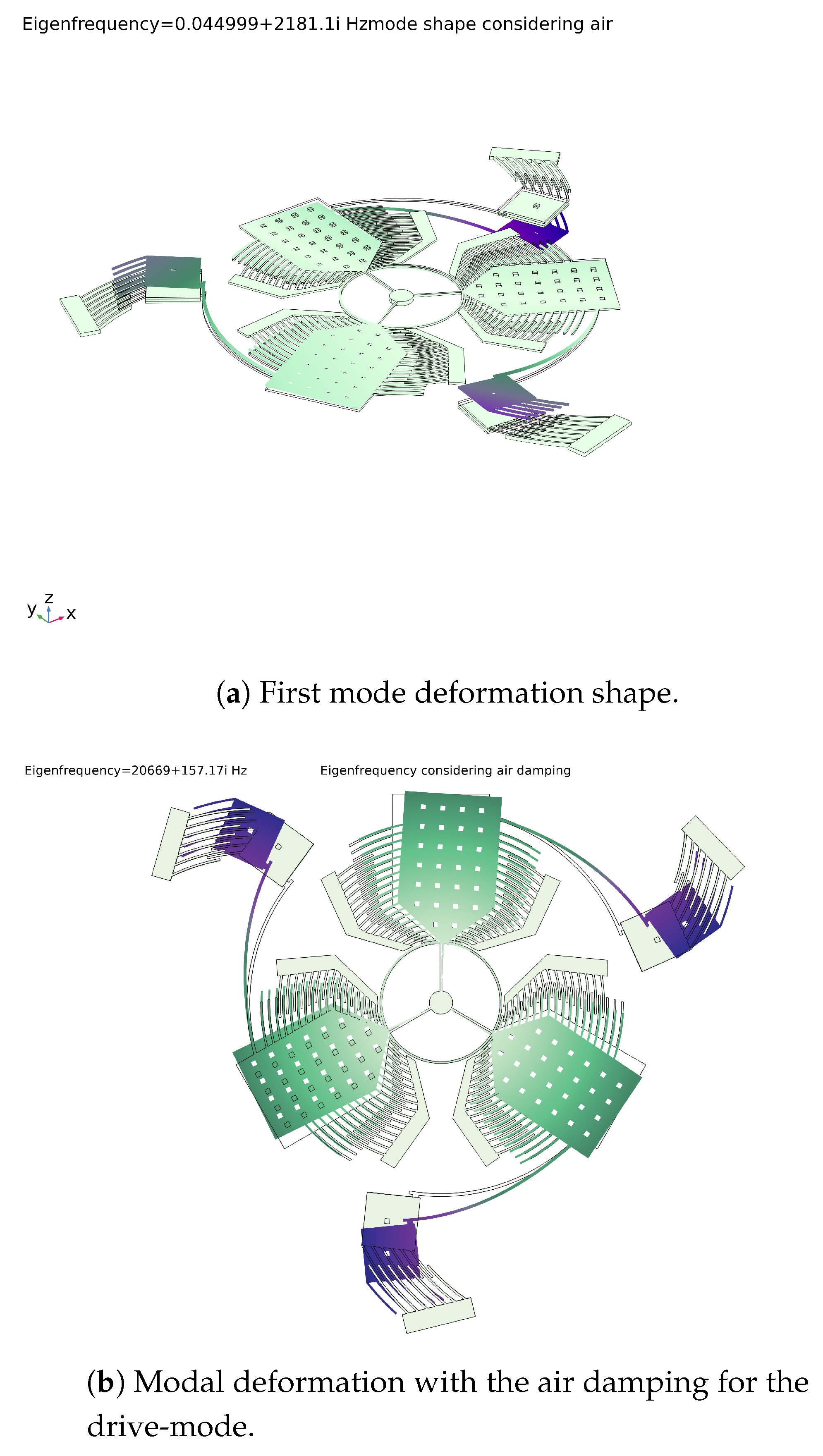
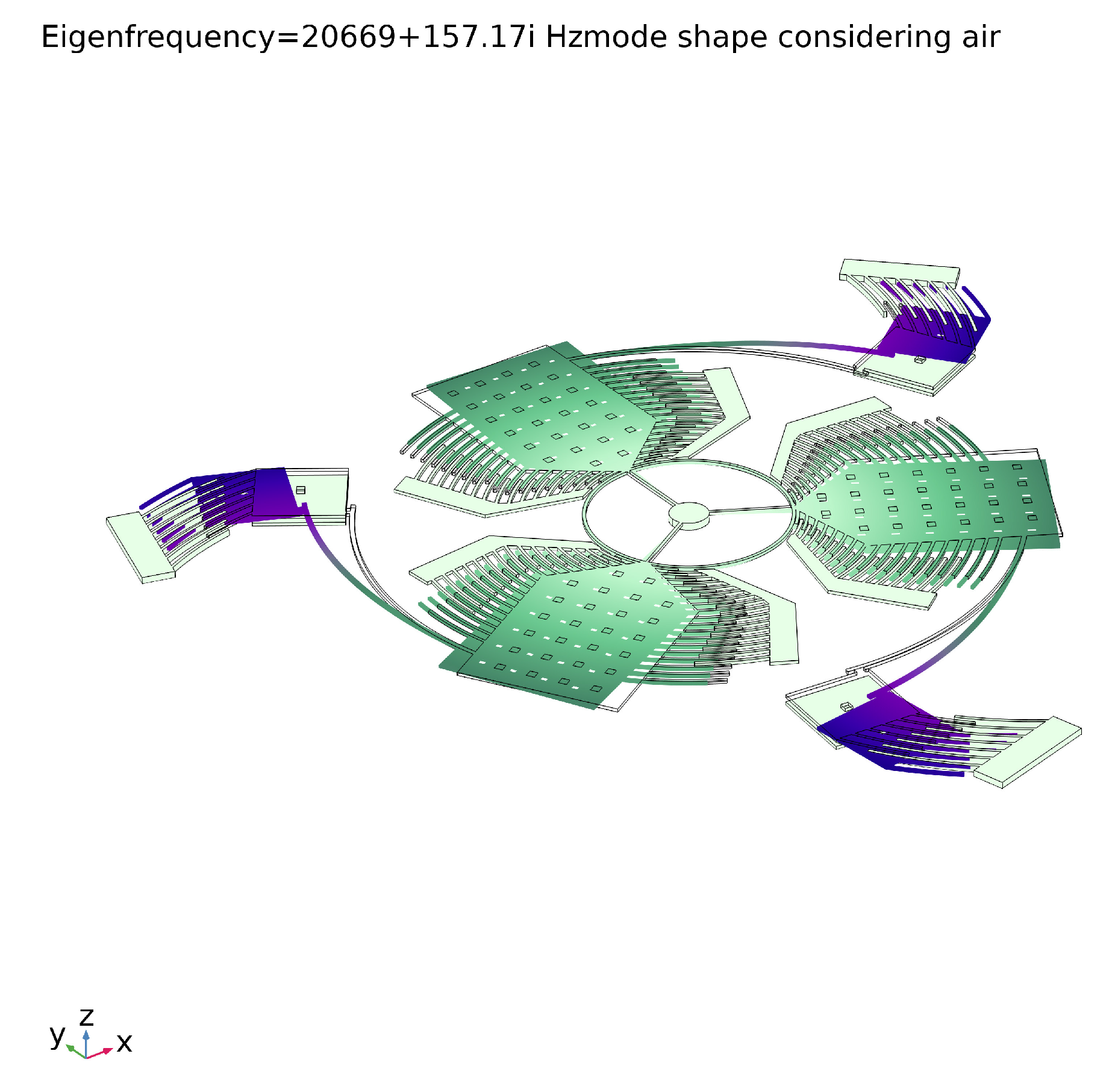
4.2.1. Damping
- Slide film damping
- Squeeze film damping.
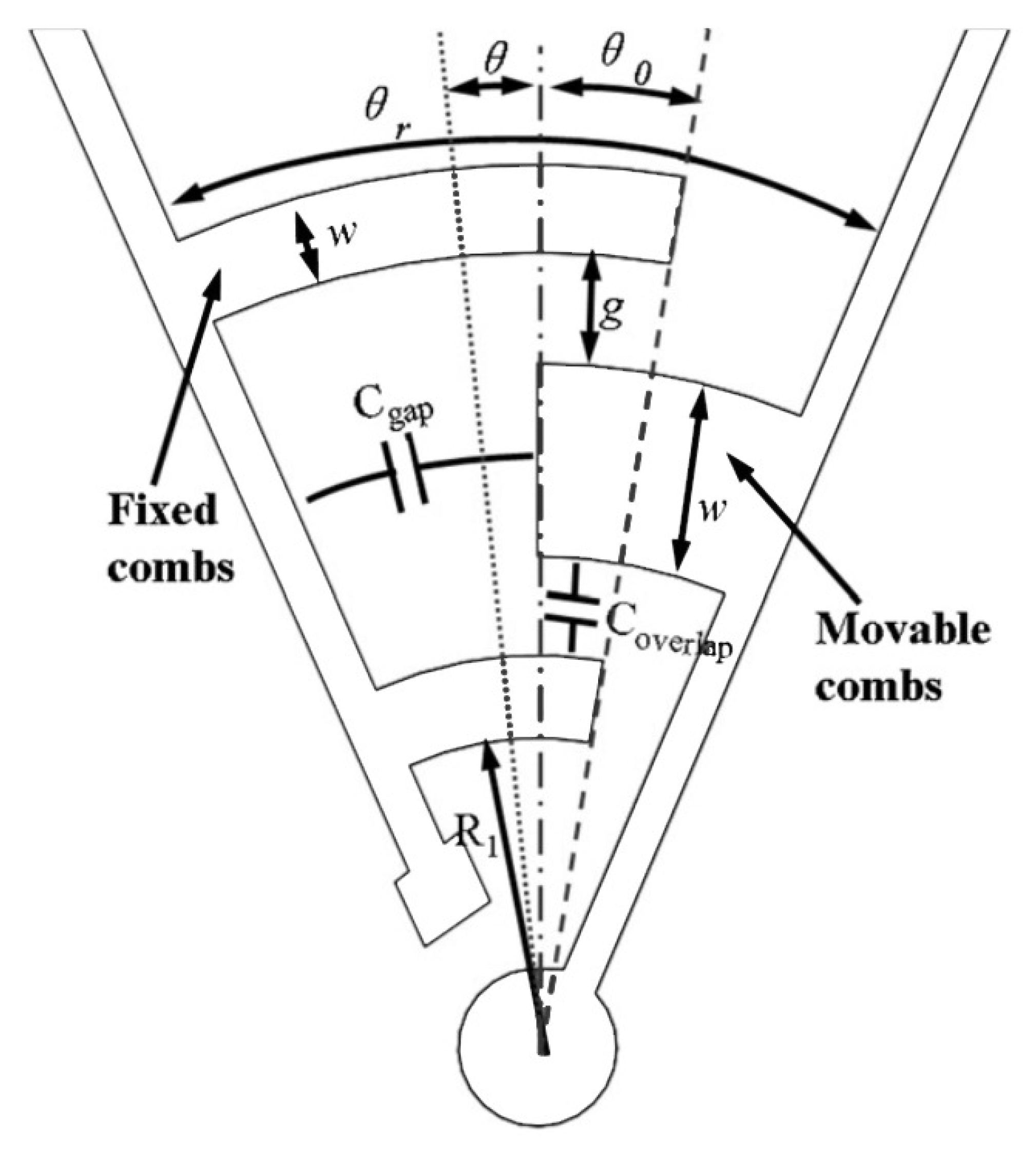
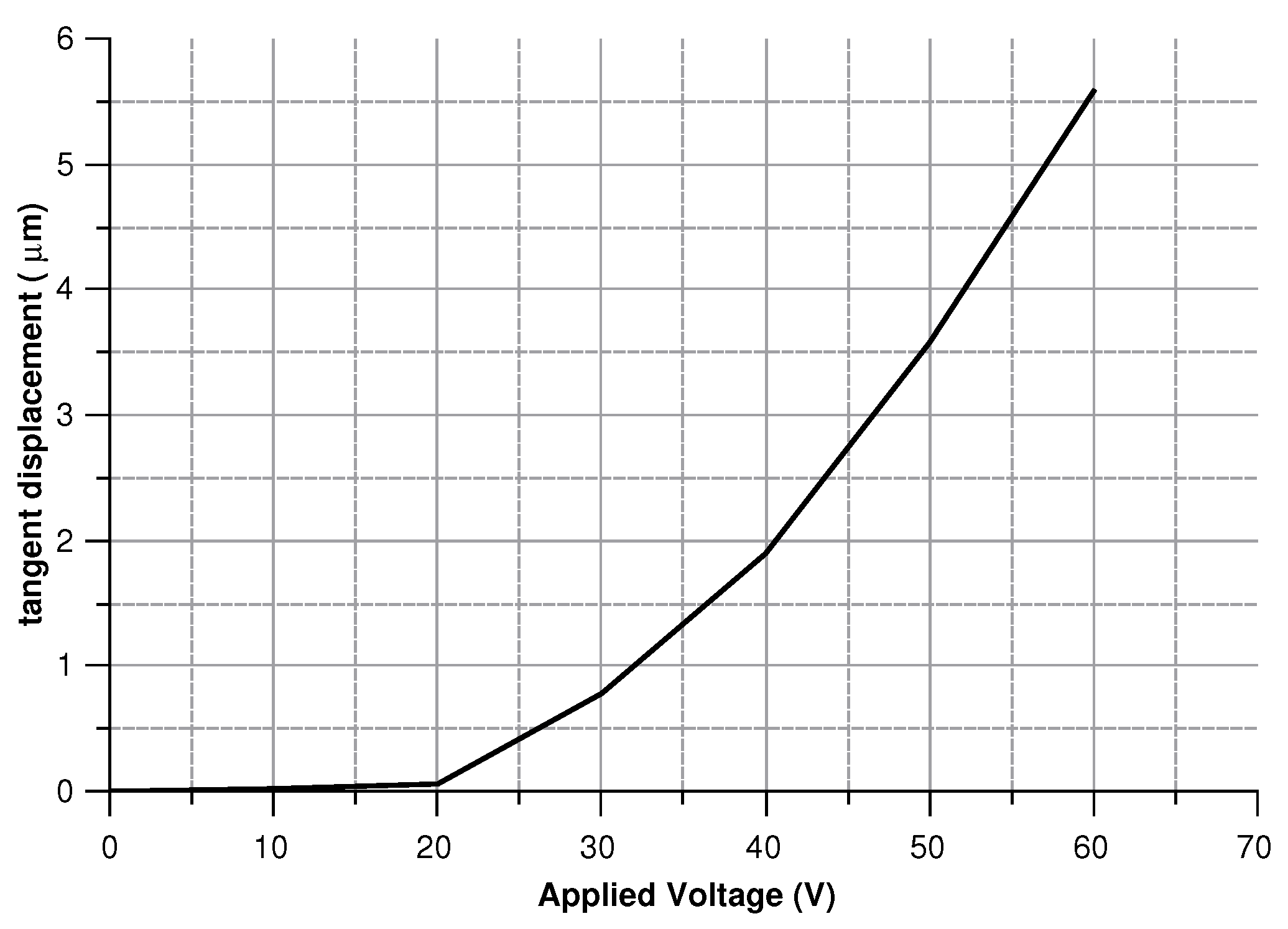
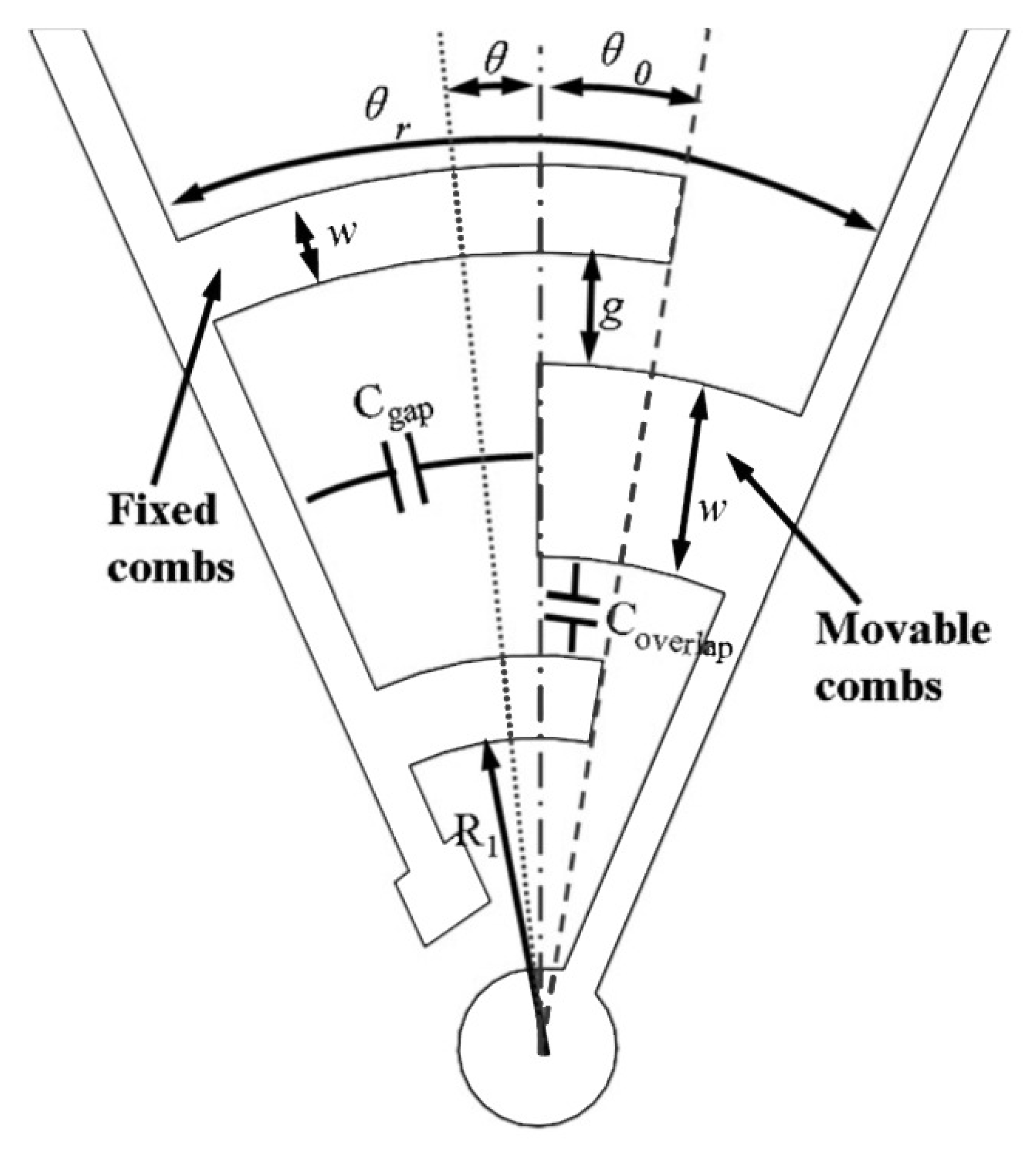
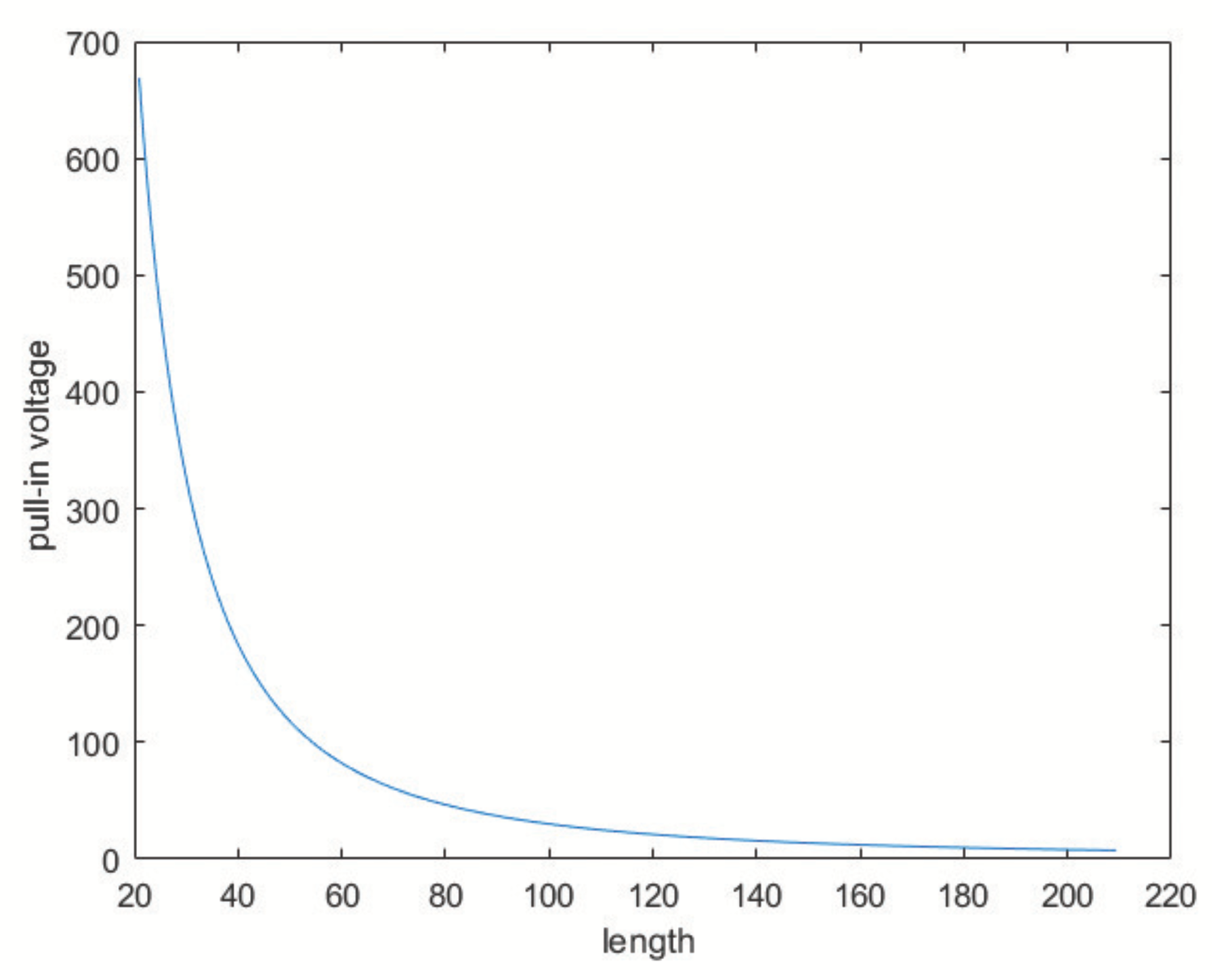
4.2.2. Actuation
- , the inner radius of the closest finger with respect to the center of rotation.
- g, the finger gap.
- W, the finger width of the fixed comb fingers.
- t, the finger and curved beam thickness.
- , the initial overlapping angle of the fingers.
- , the generated overlapping angle.
- n, number of fingers in a comb.
- initial stator-to-rotor opening sector angle.
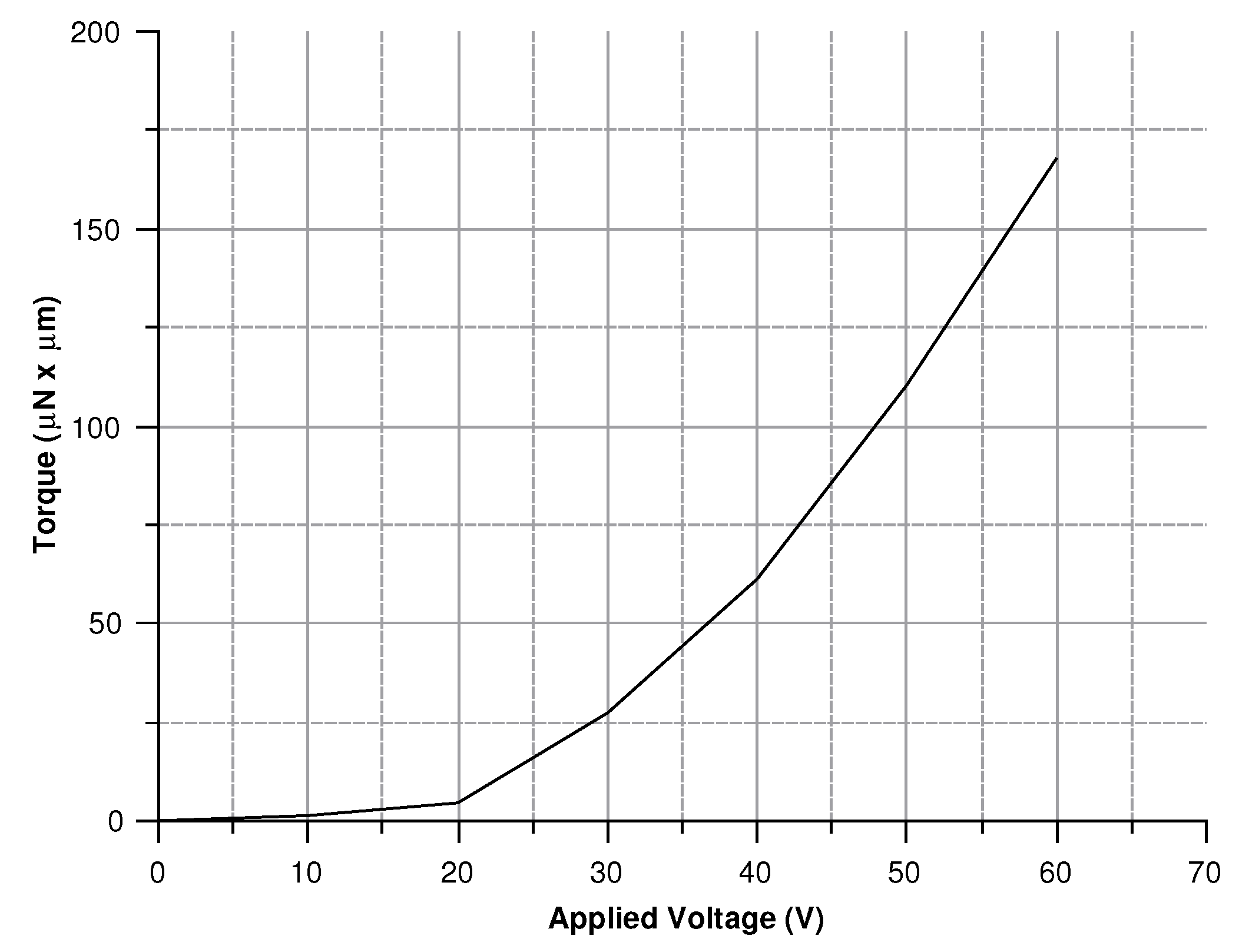
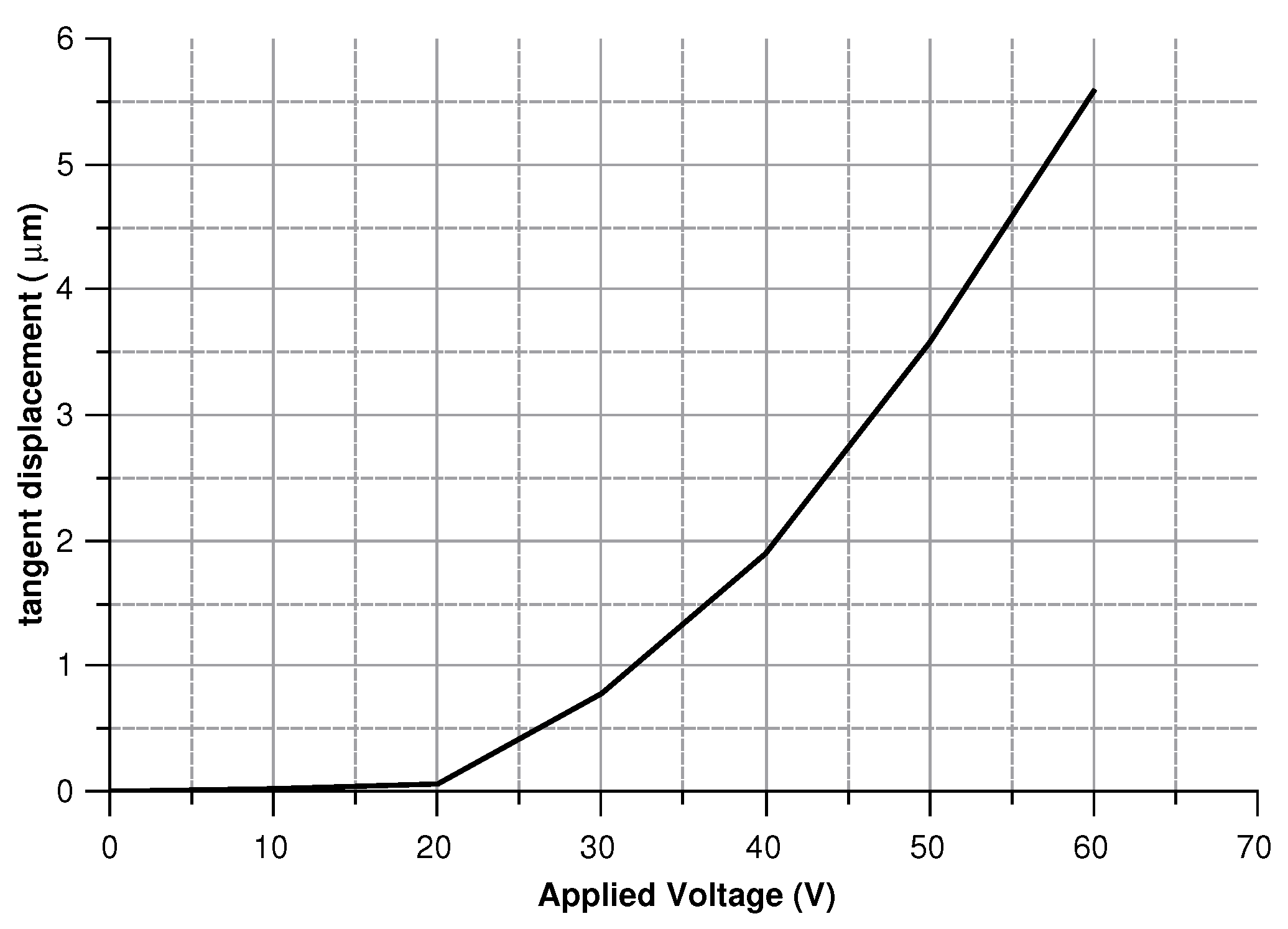
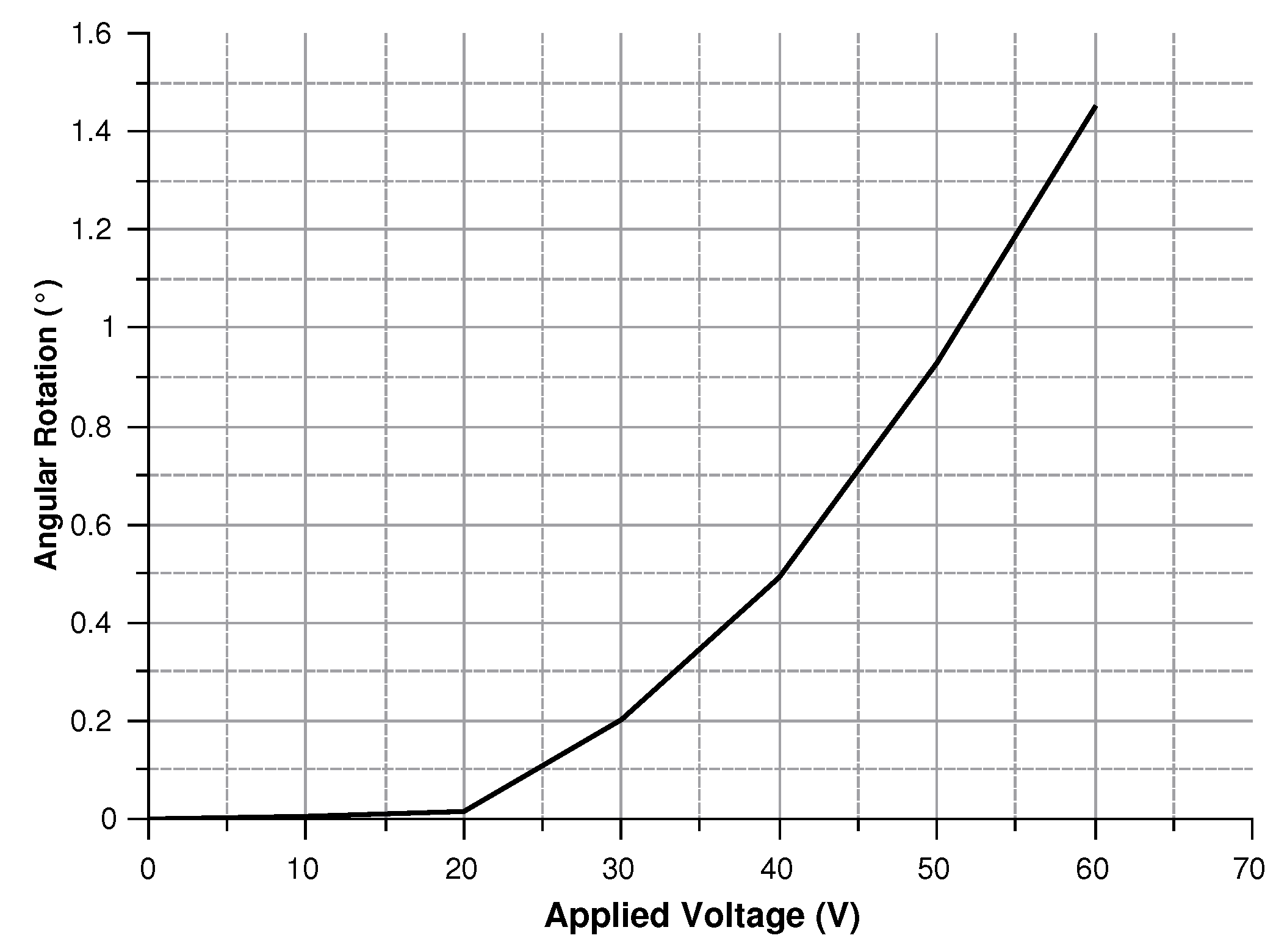
4.2.3. Actuation Design
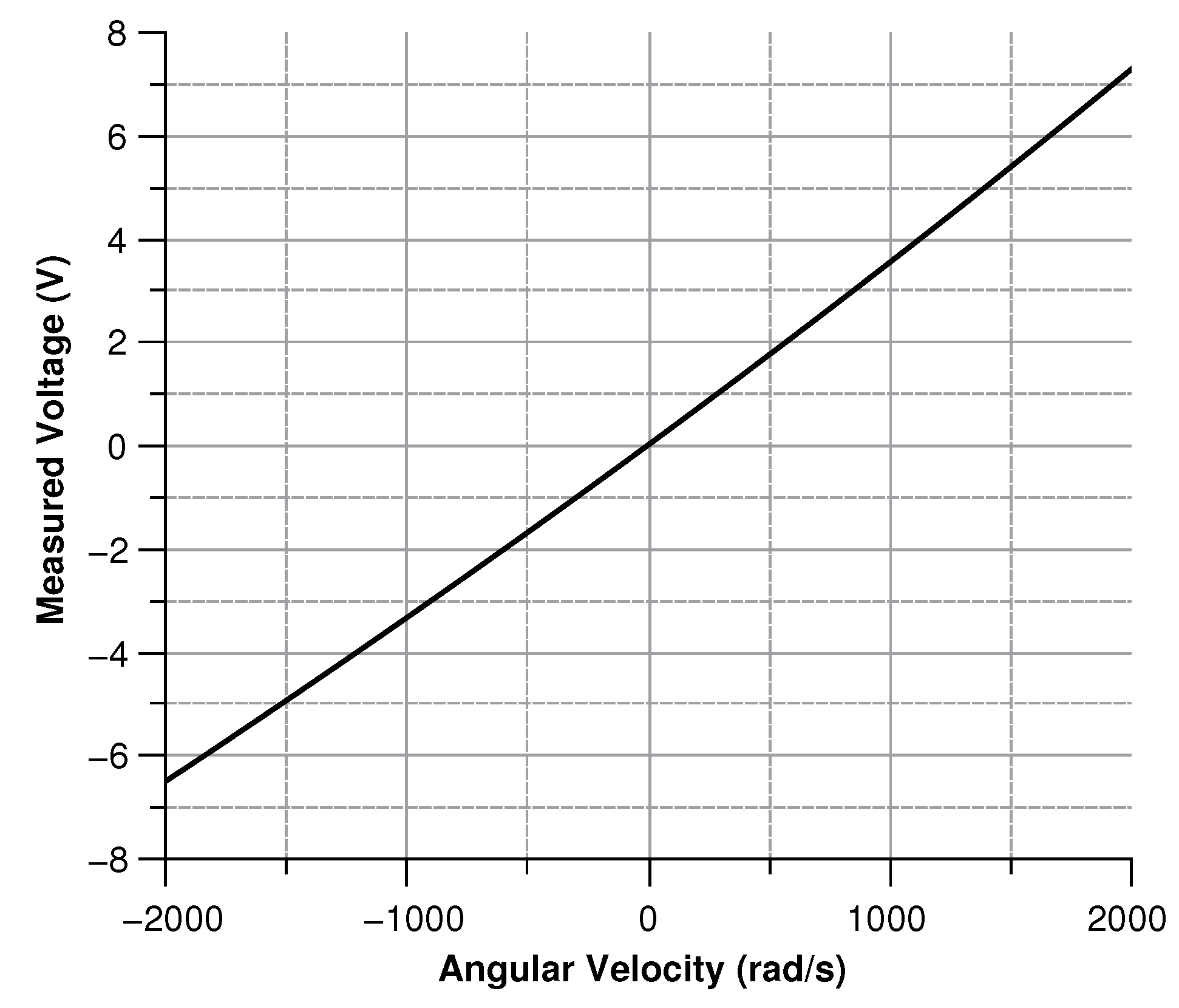
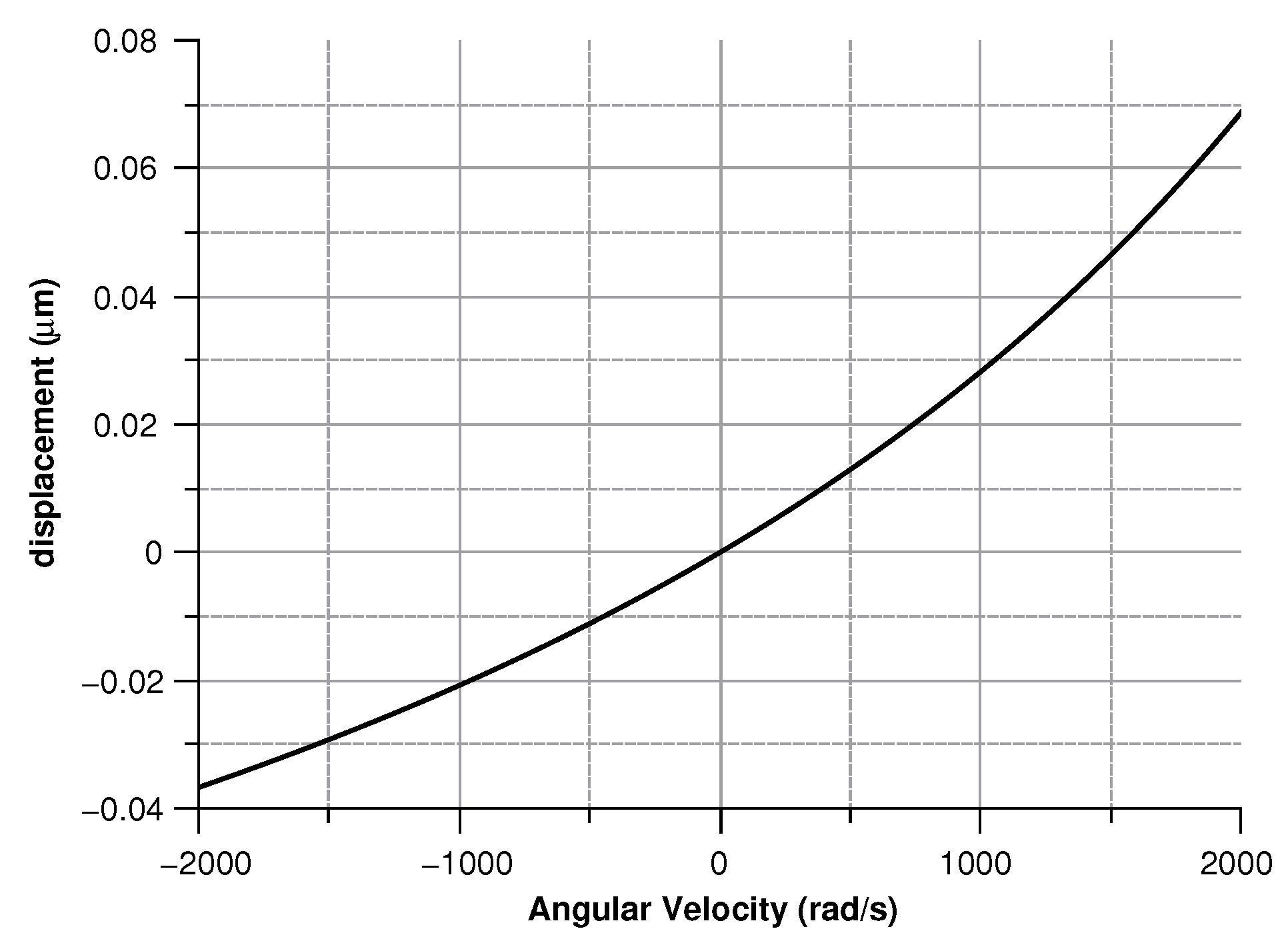
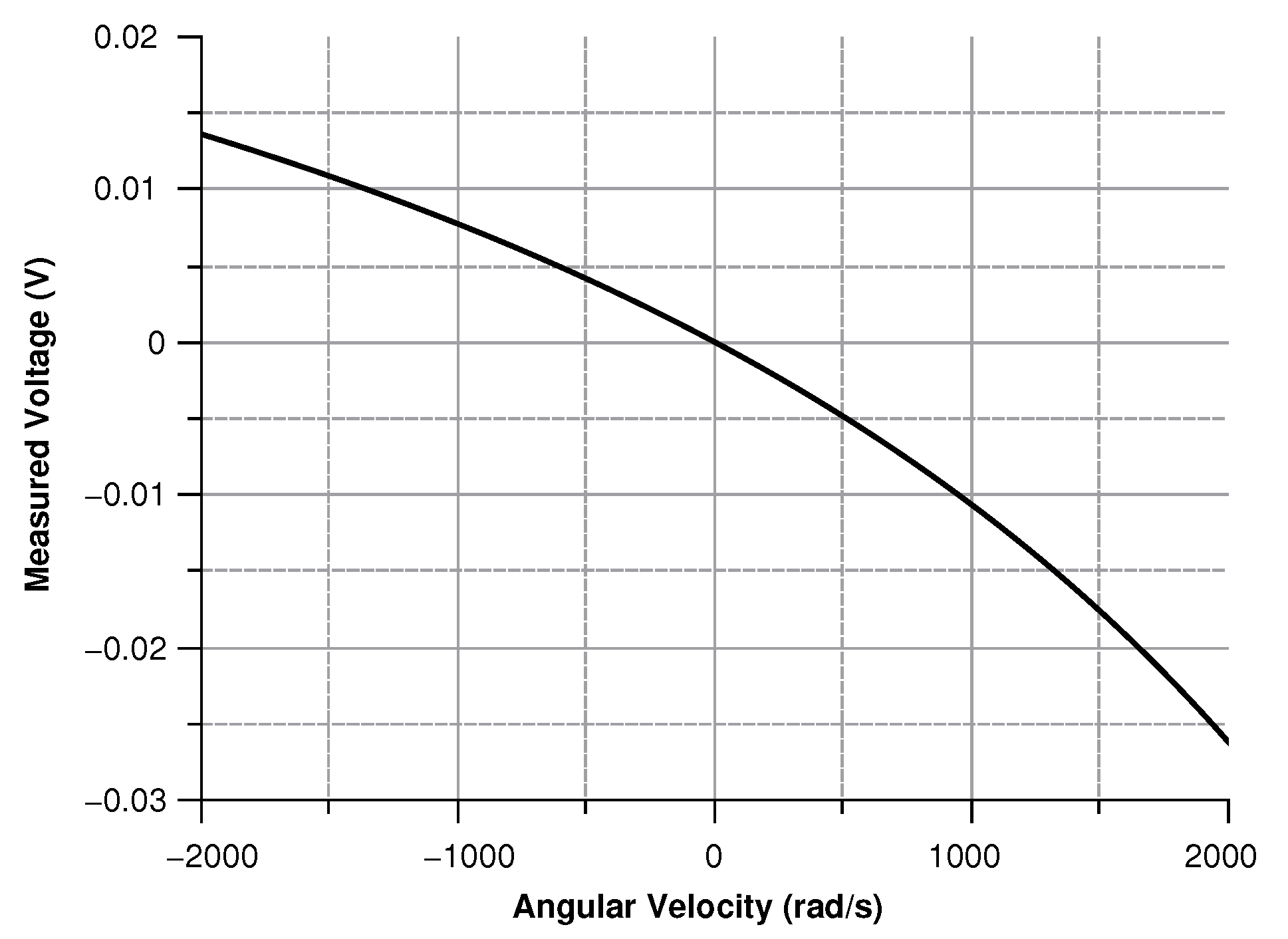
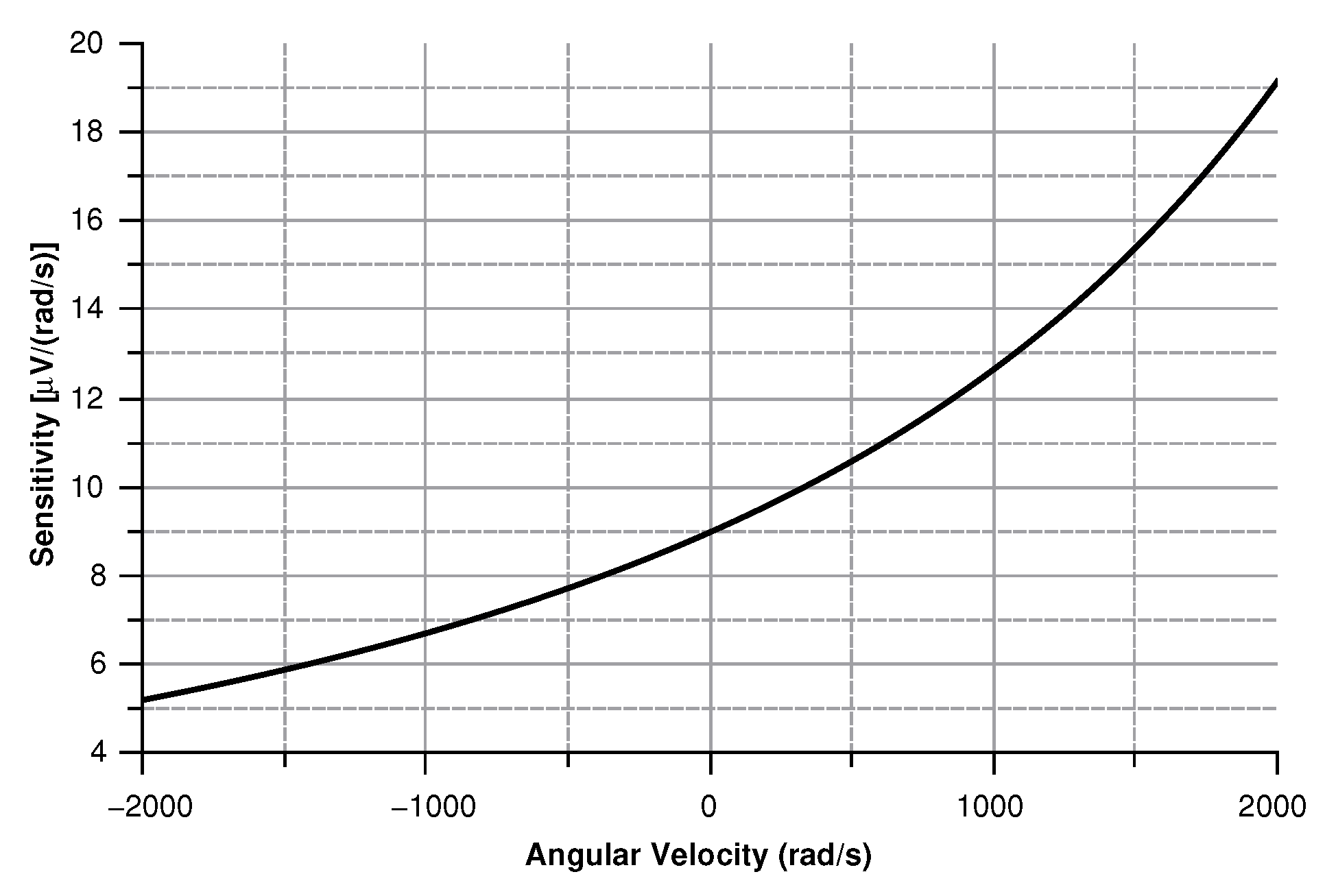
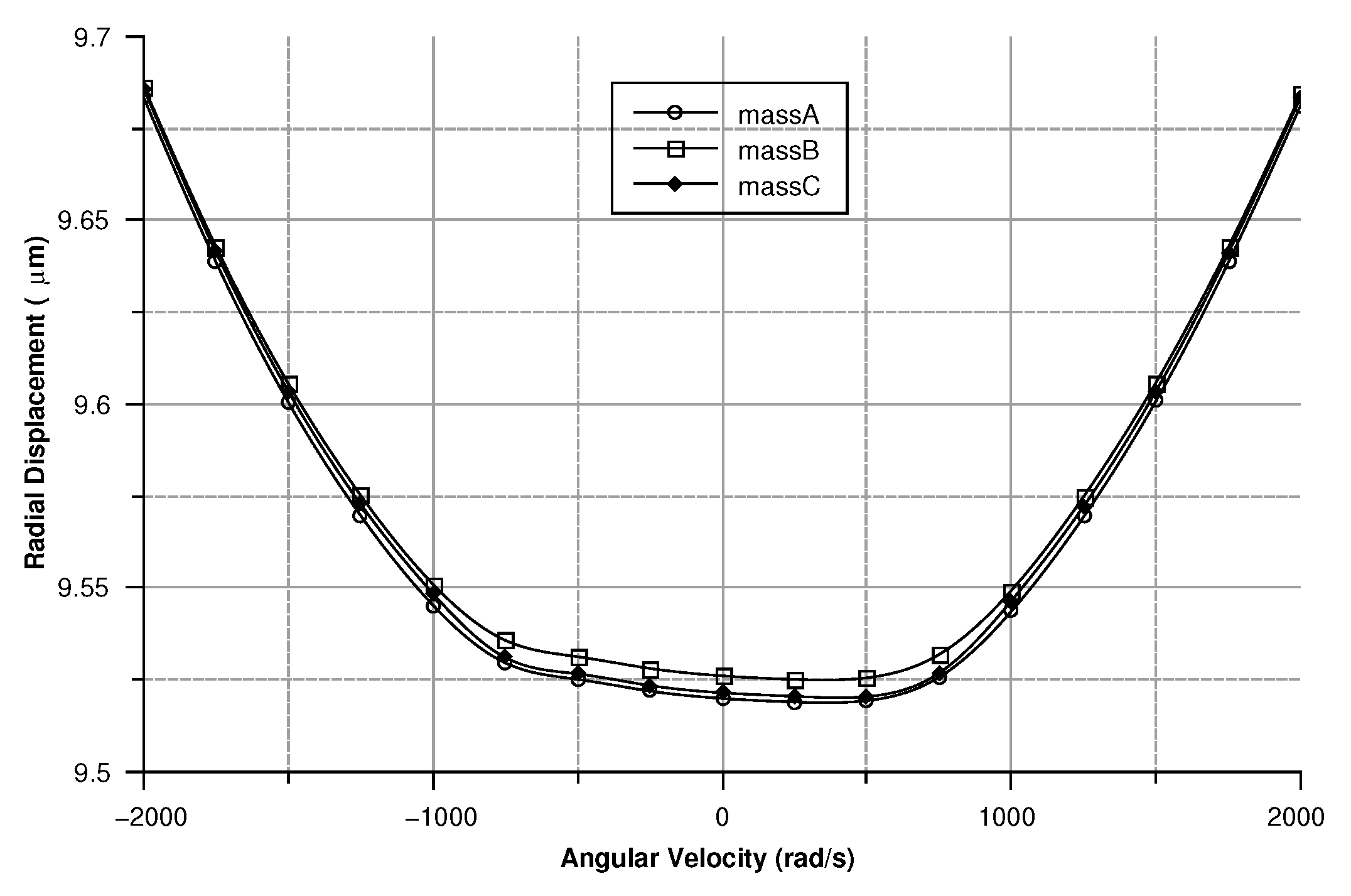
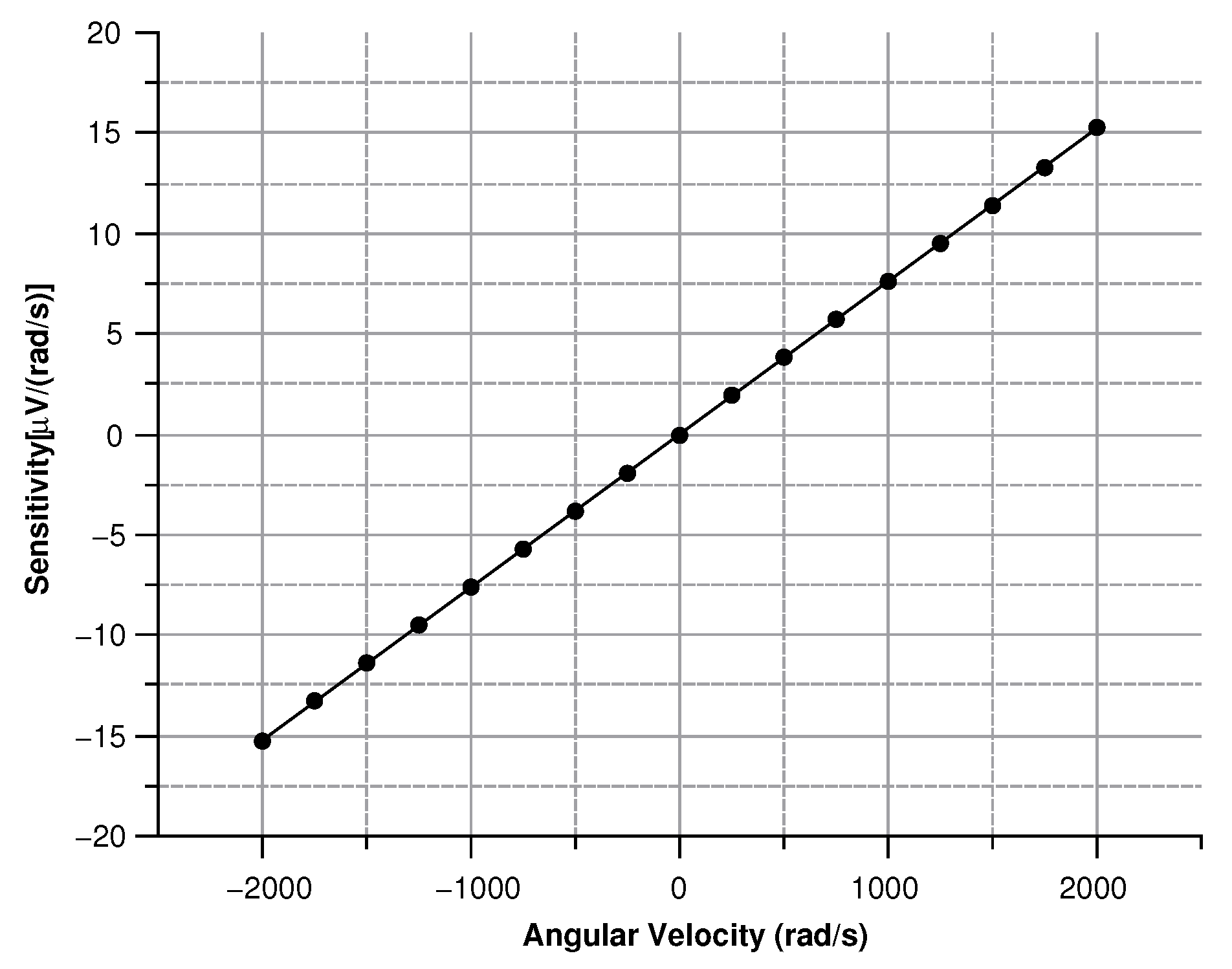
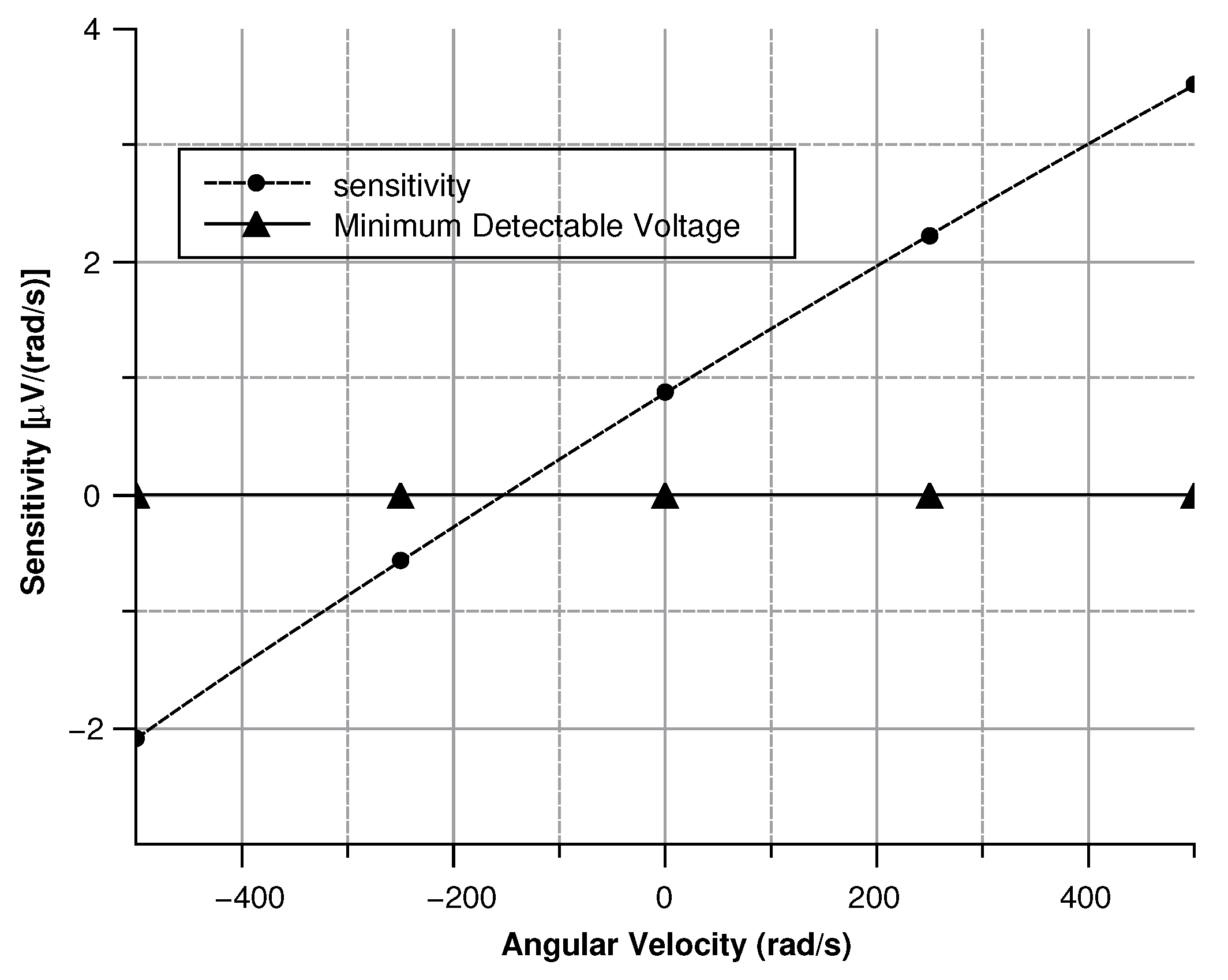
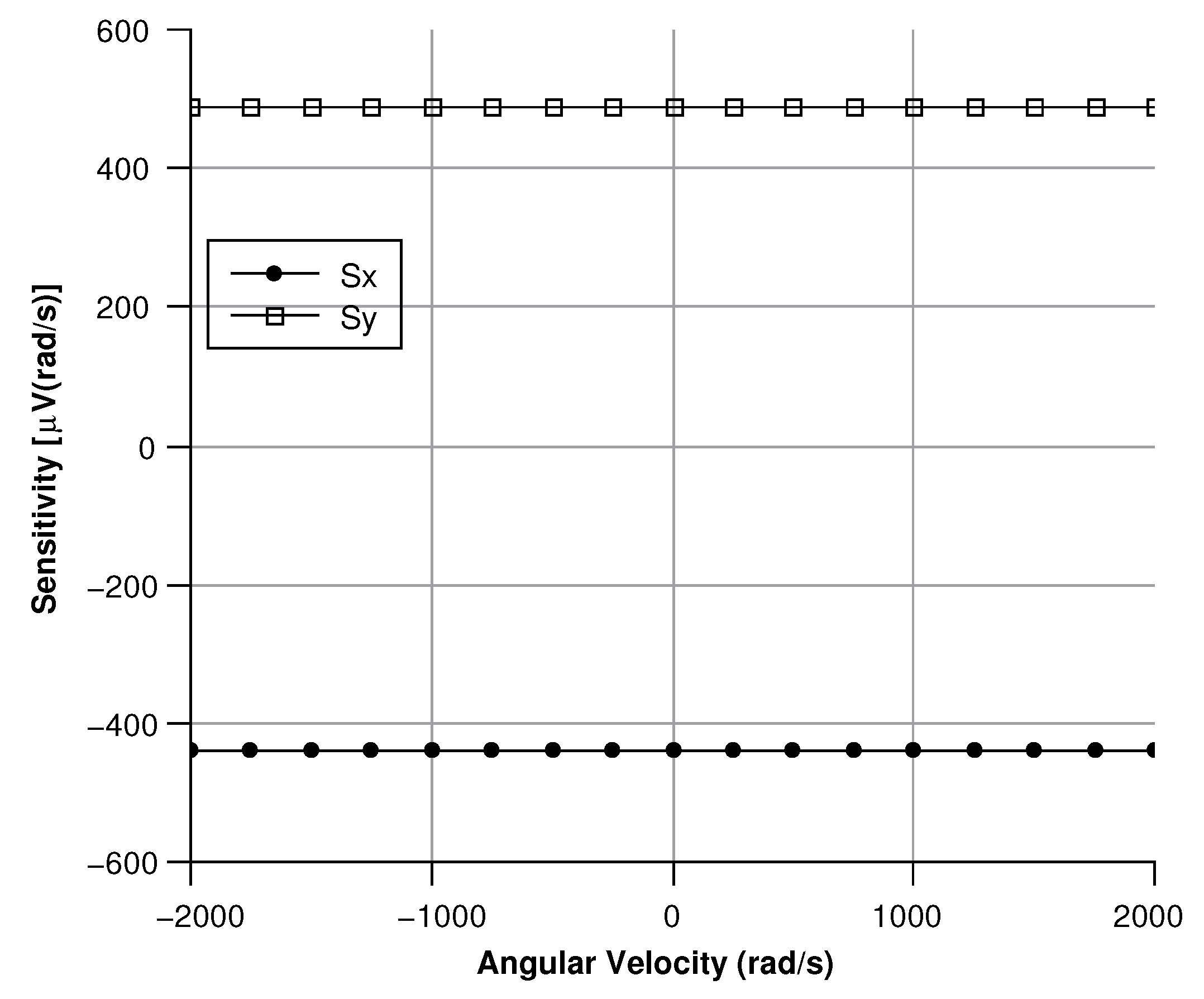
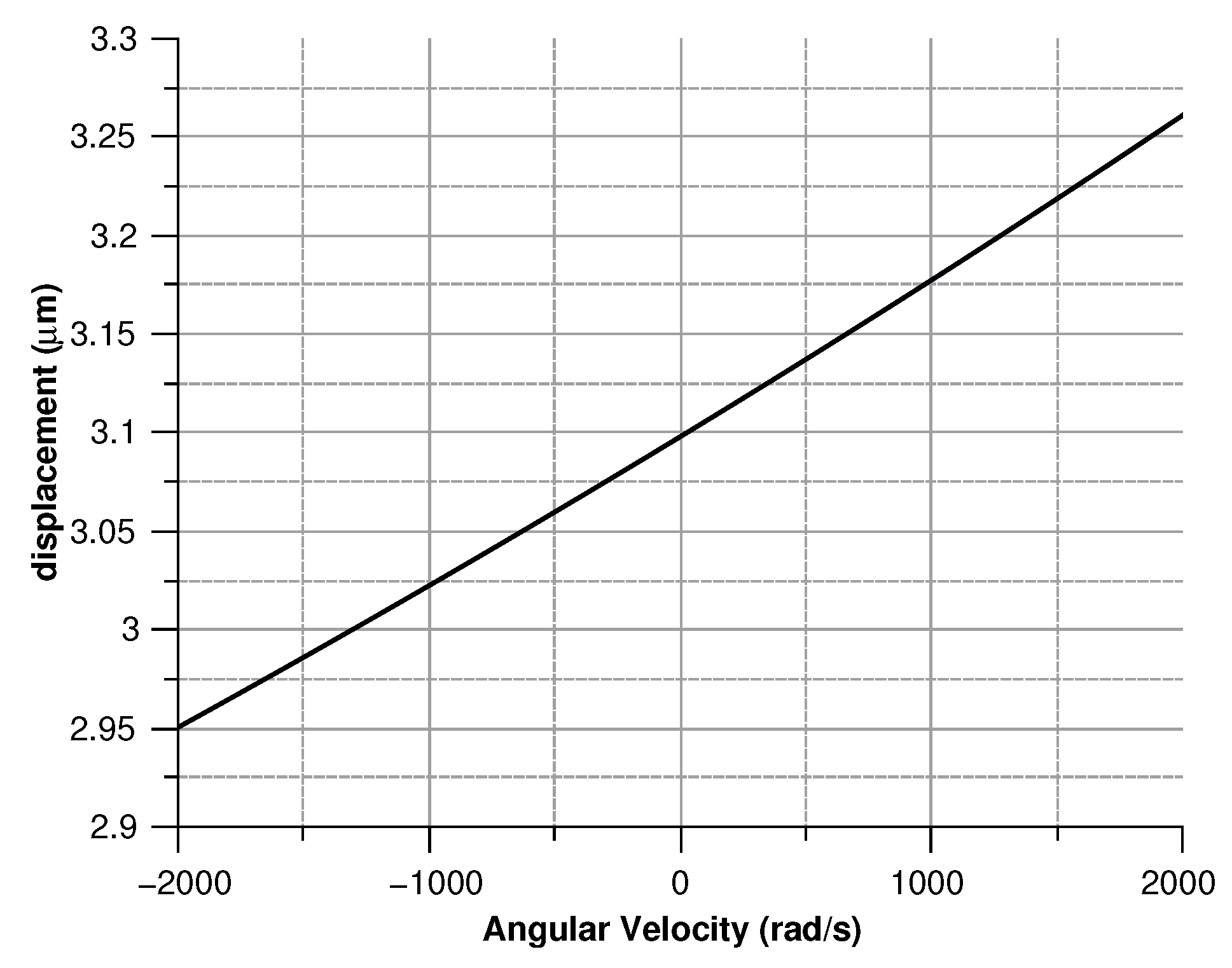
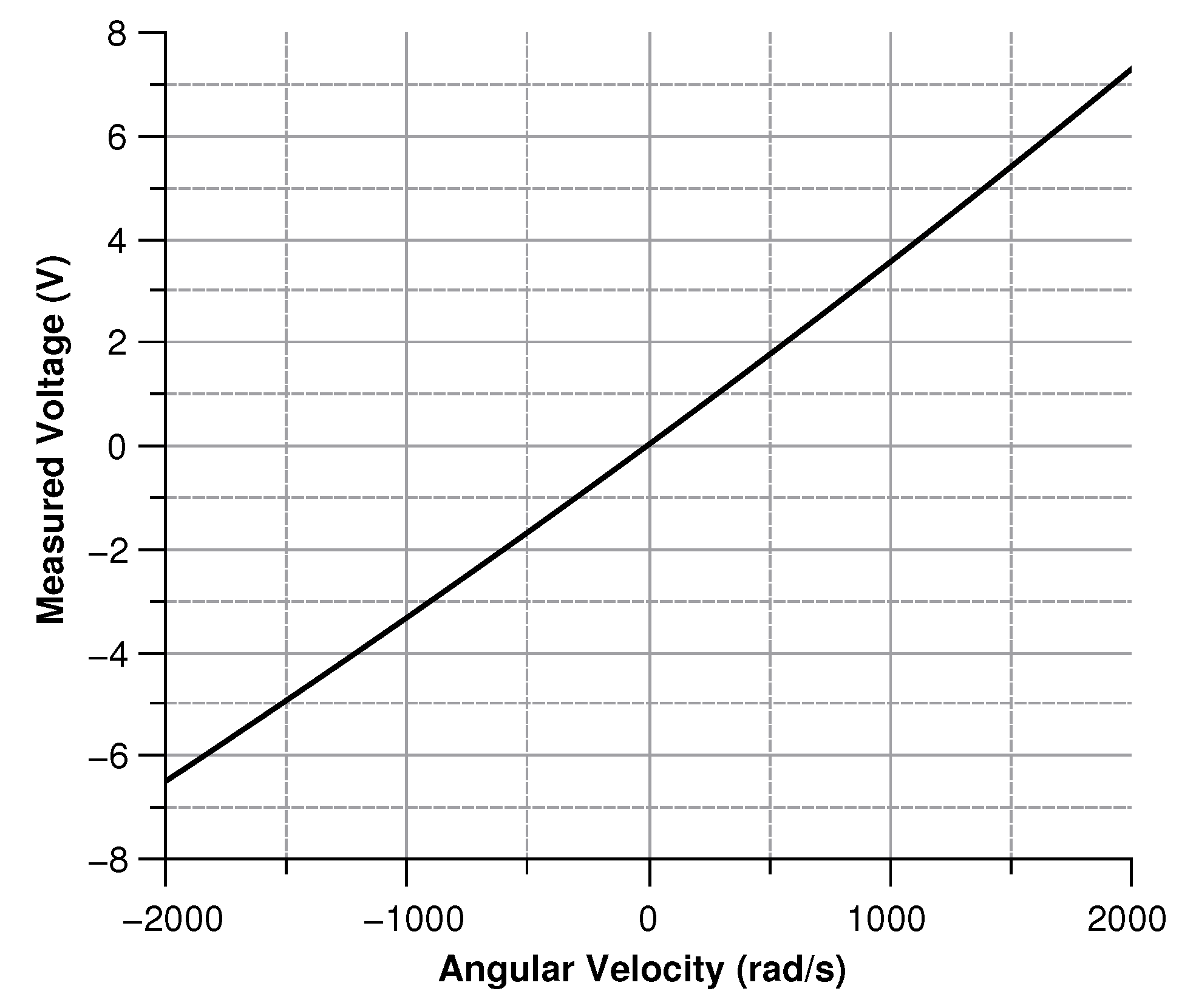
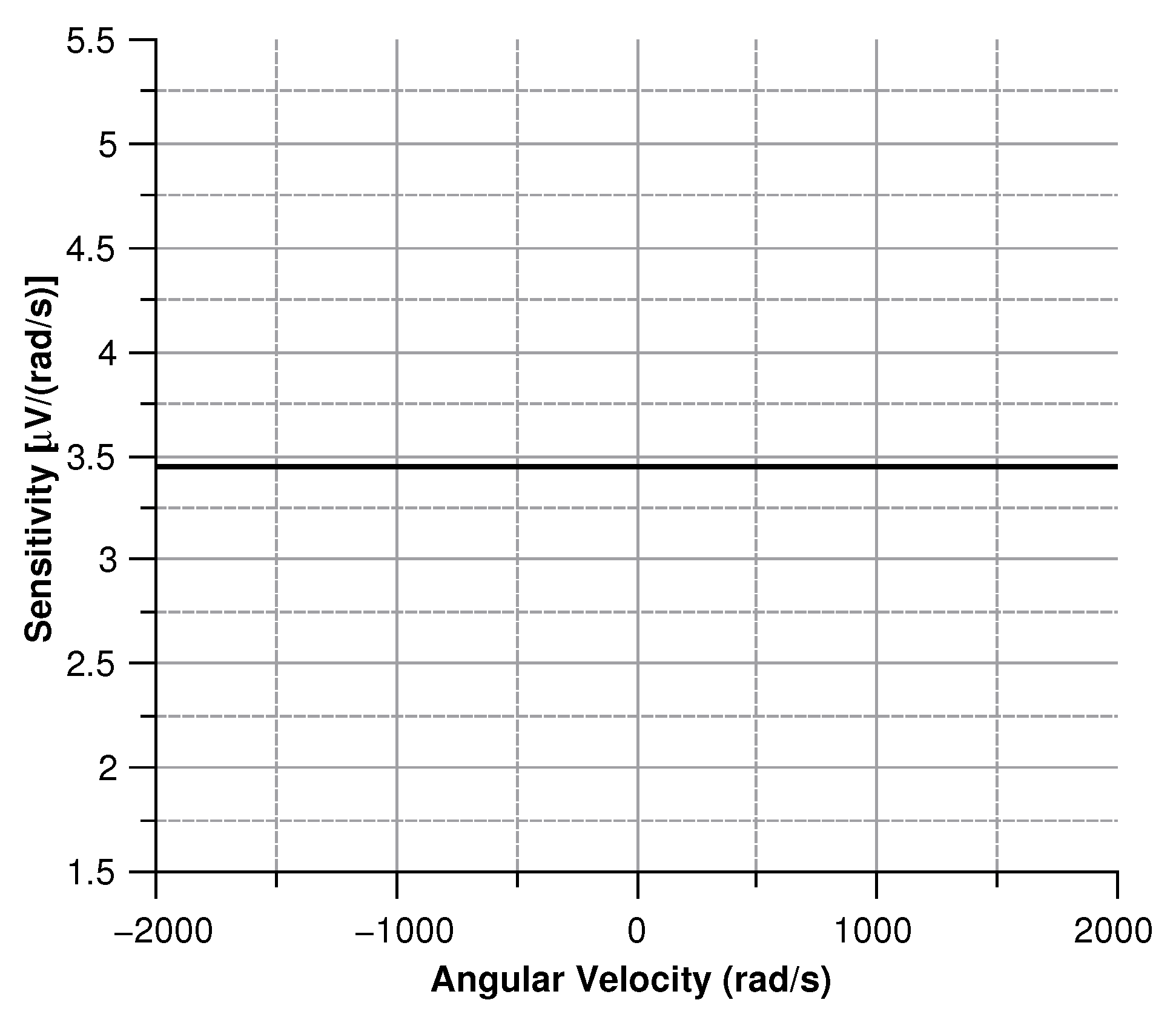
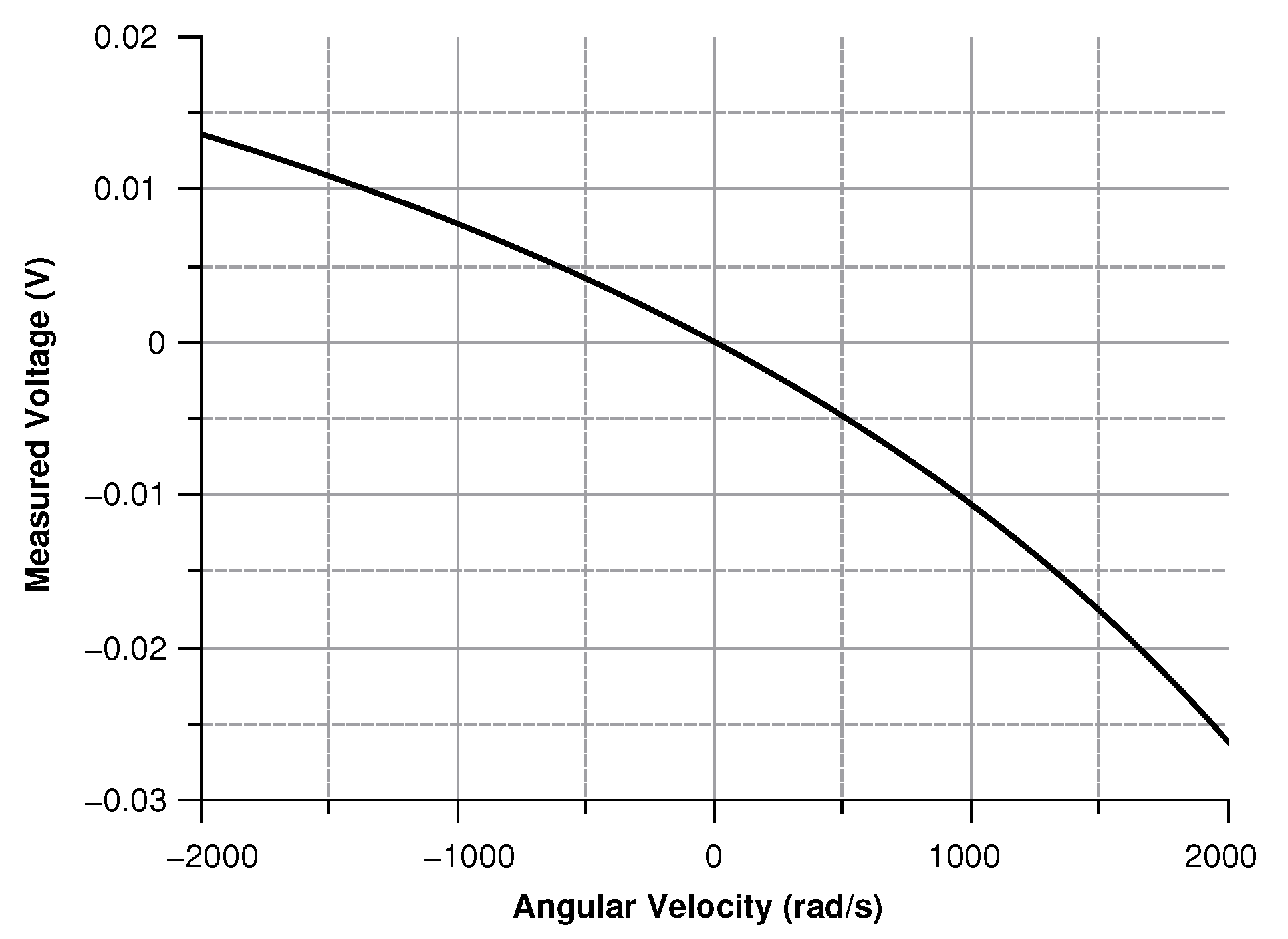
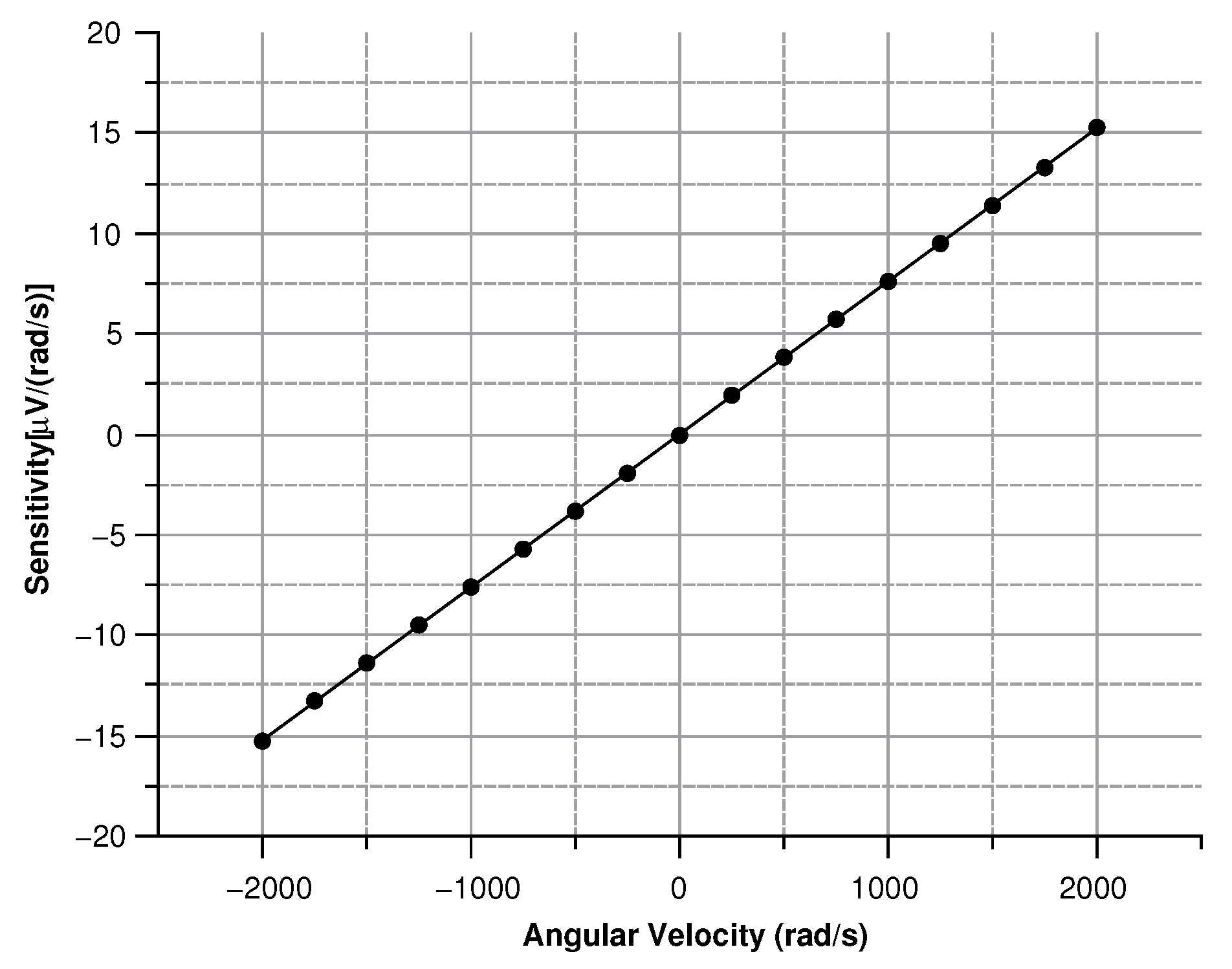
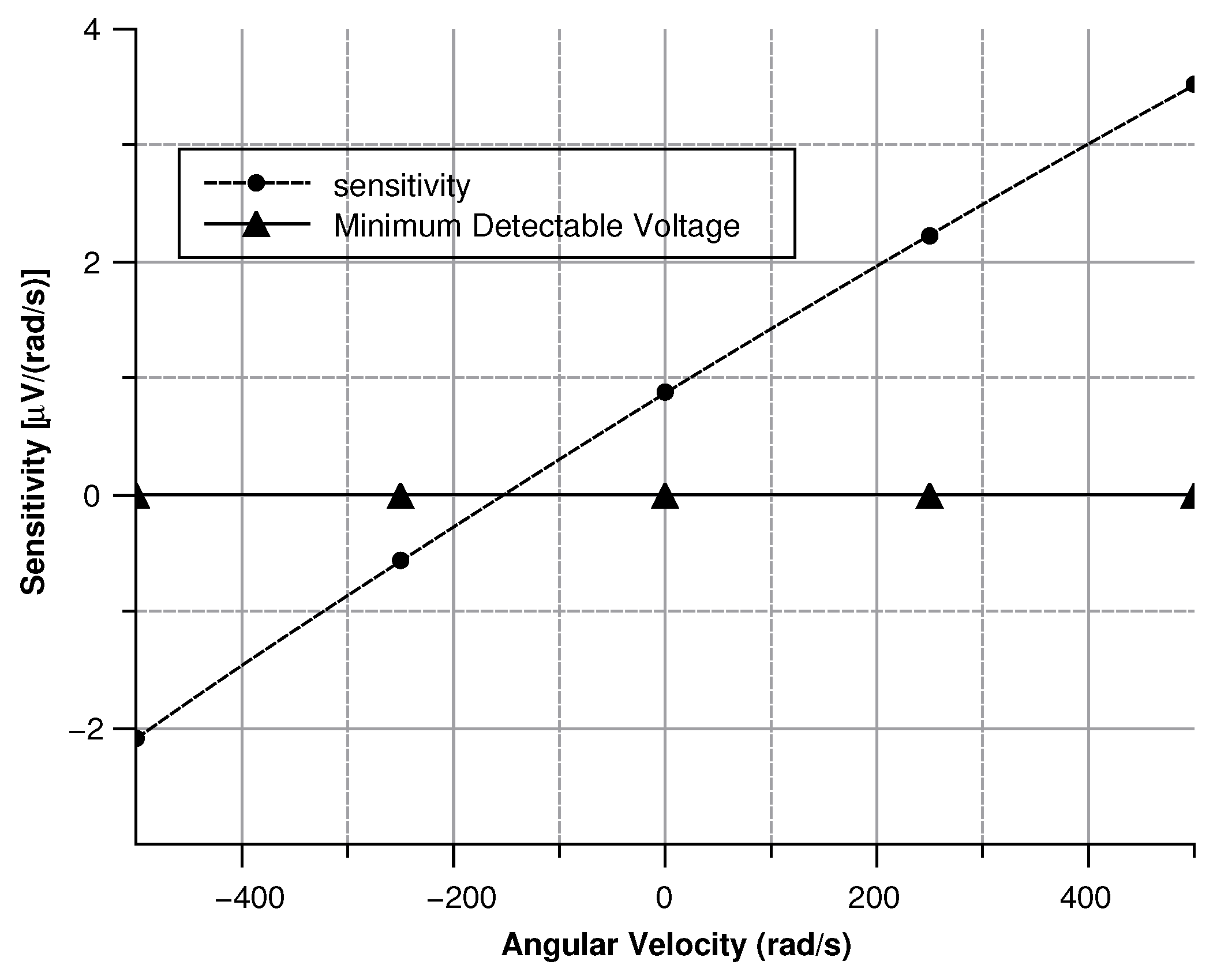
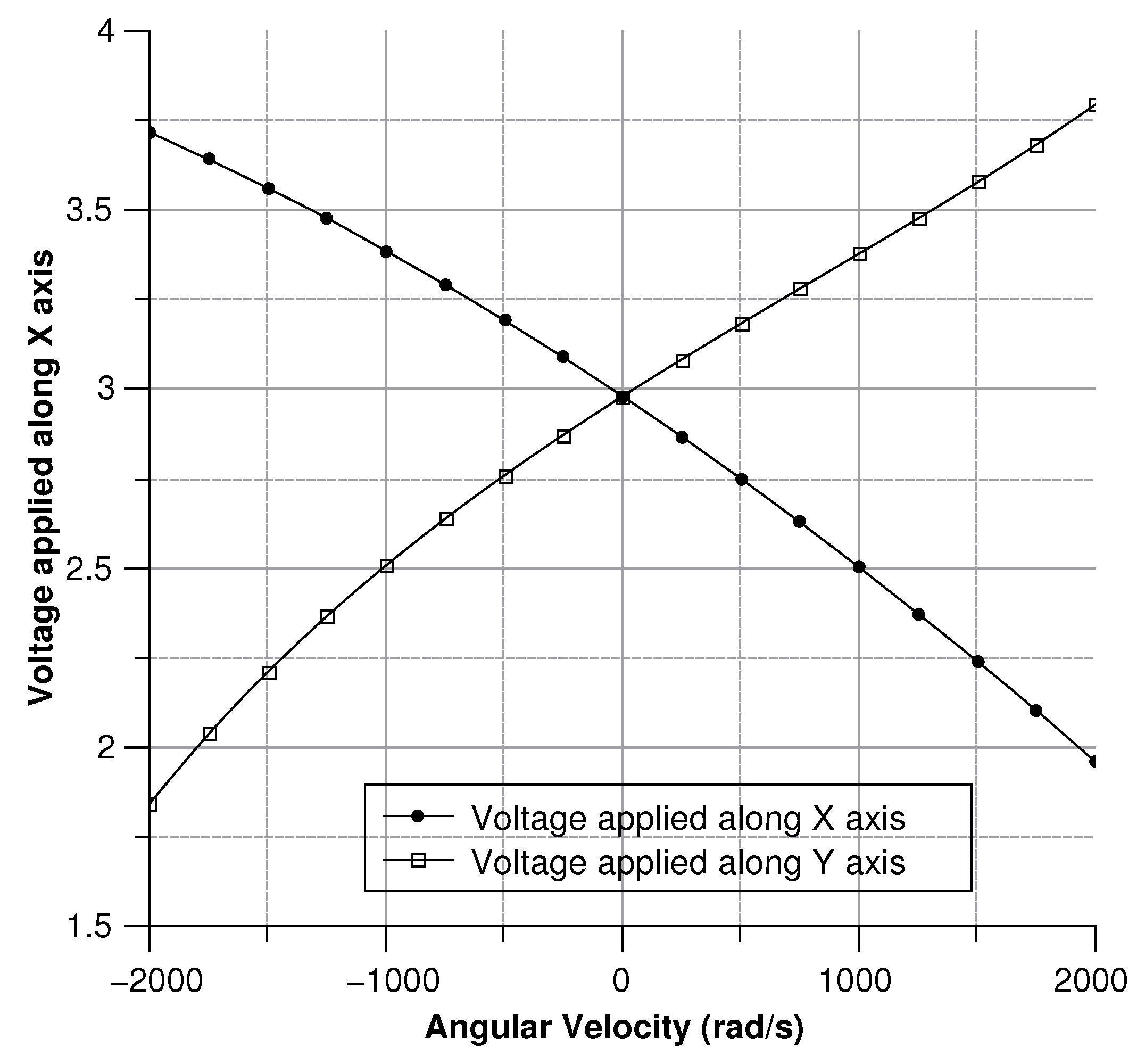
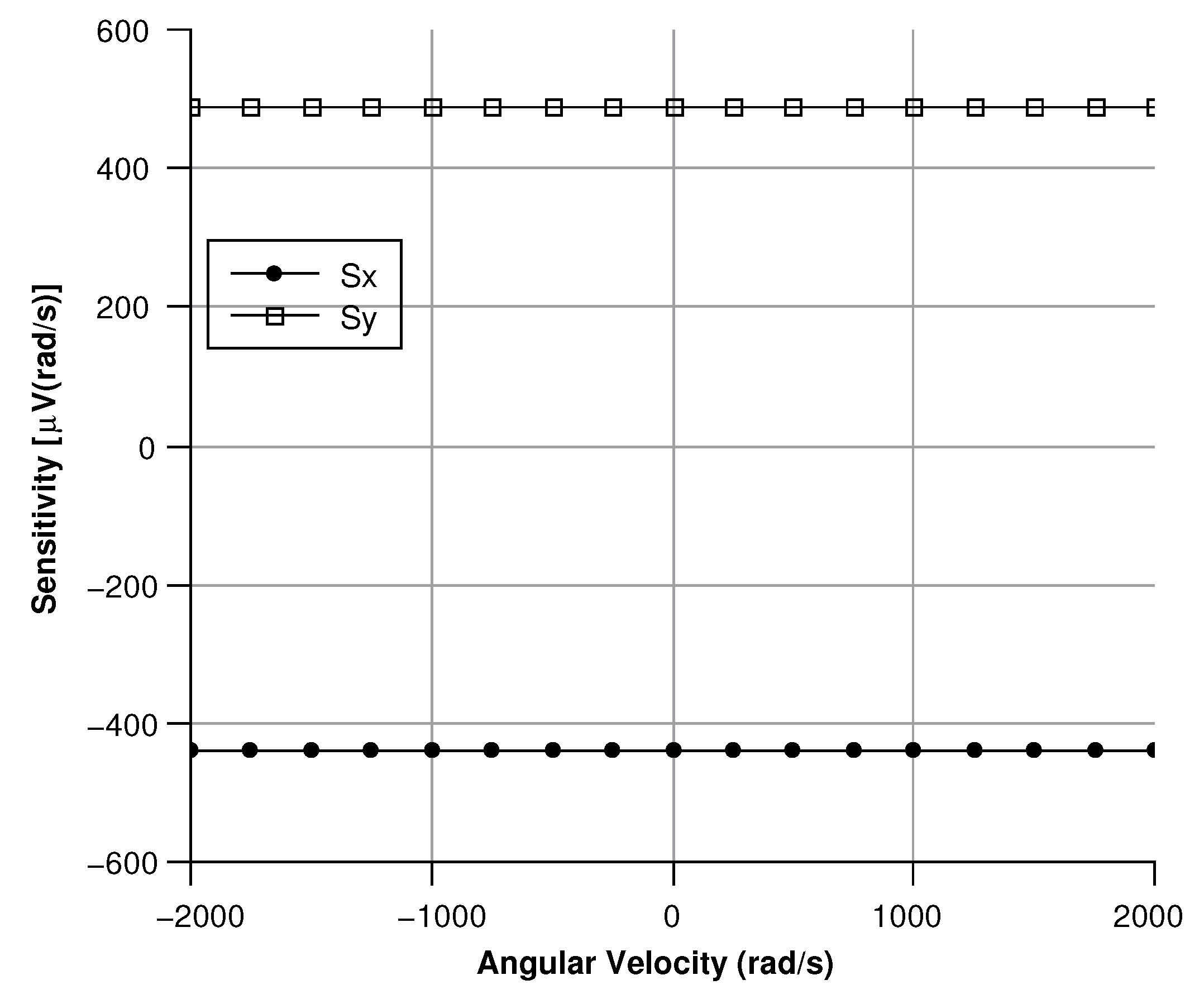
4.2.4. Sensitivity Curves
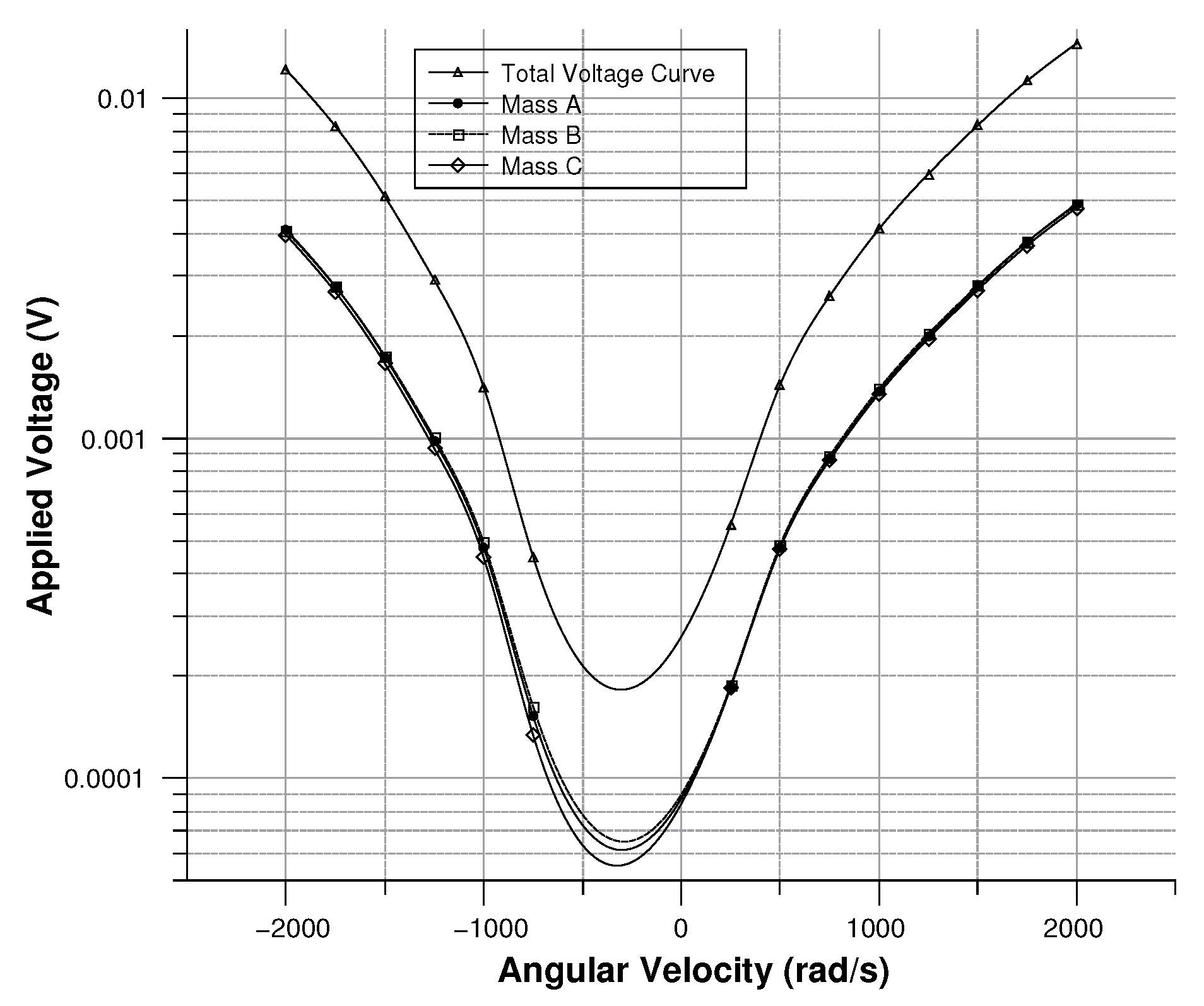
- The angular velocity is along the z-axis, which results in an in-plane displacement of the sense-mass.
- The angular velocity is along the x-axis or the y-axis, which results in an out-of-plane displacement of the sense-mass.
Angular Velocity along the z-Axis
- A rotation along the center of the sensor depending on the drive-mode.
- A rotation along the connection point with the drive mass depending on the Coriolis force.
Angular Velocity along the x and the y Axes
4.2.5. Structural Control
Section D
Section E
Section F
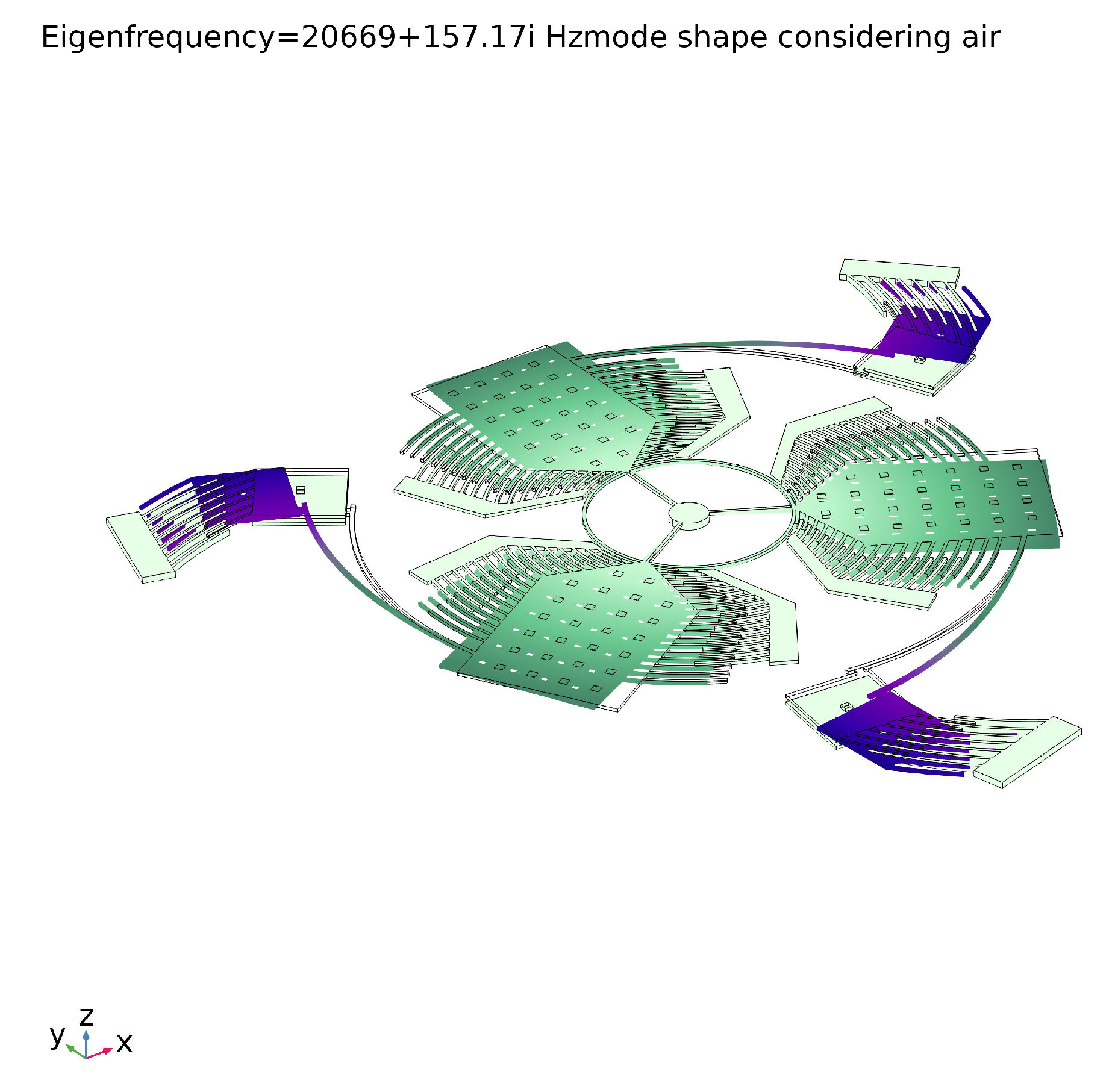
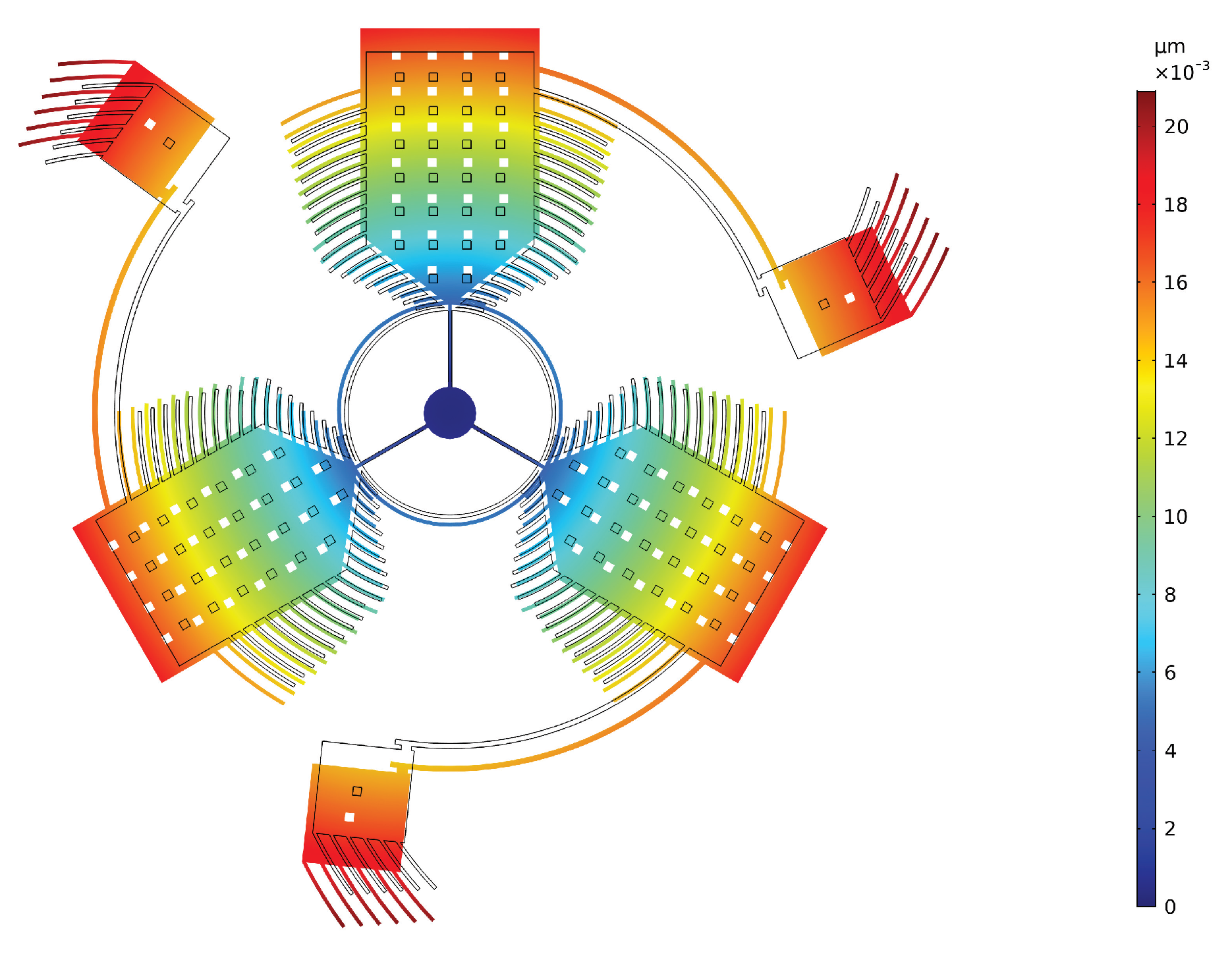
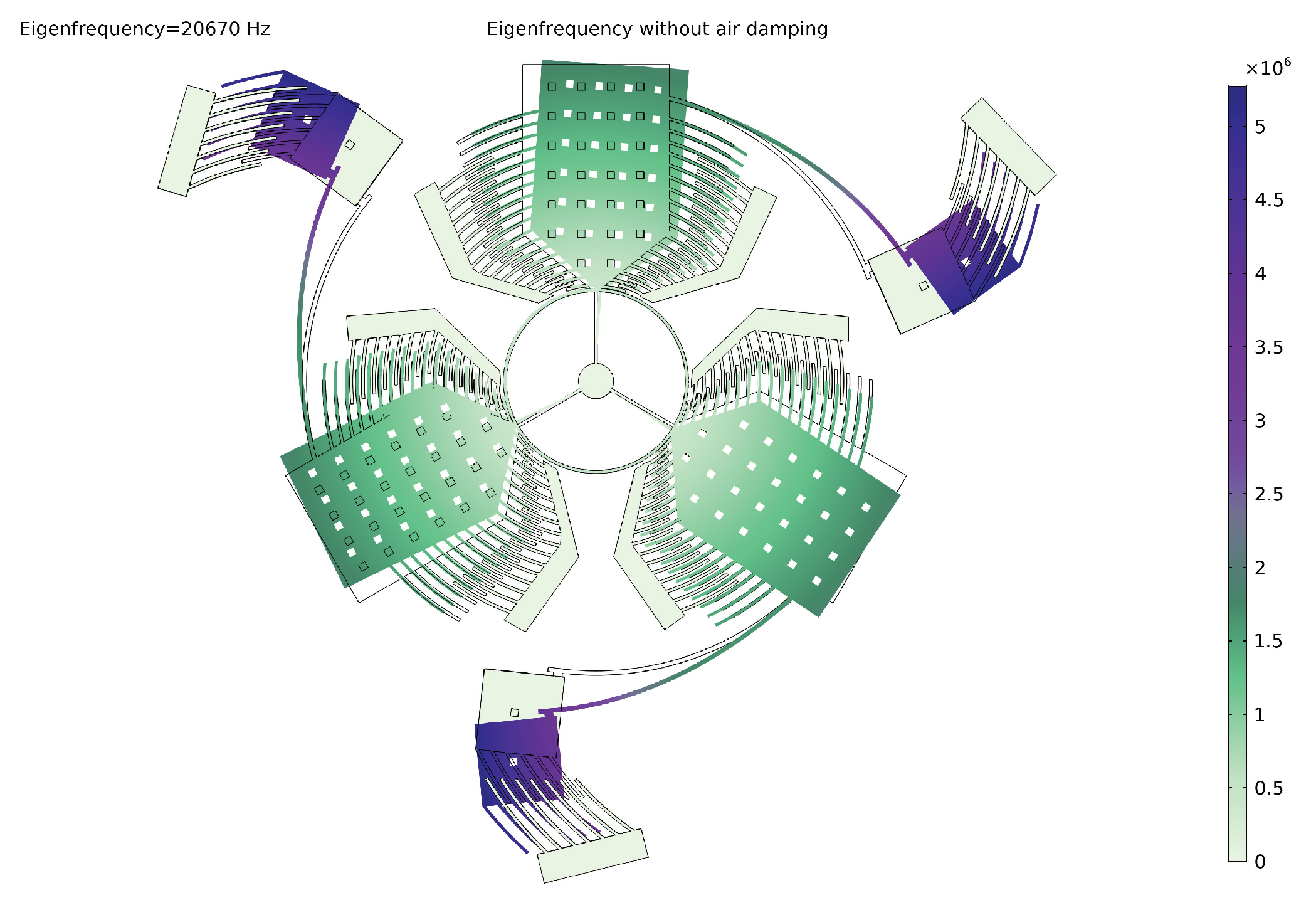
5. FEM Analysis
5.1. Complete Behavior of the Sensor
5.1.1. Angular Velocity along the z-Axis
5.1.2. Angular Velocity Along the x and y Axis
6. Comparison with Similar Devices
7. Conclusions
- A first guess solution predicated on basic formulas in order to provide a starting point for the successive steps.
- An algorithm based on an iterative procedure to refine the first guess solution according to the fabrication process constraints.
- The validation of the final solution by a FEA (Finite Element Analysis) software.
Author Contributions
Funding
Conflicts of Interest
References
- Ville, K. Practical MEMS; Small Gear Publishing: Las Vegas, NV, USA, 2009. [Google Scholar]
- Gan, Z.; Wang, C.; Chen, Z. Material Structure and Mechanical Properties of Silicon Nitride and Silicon Oxynitride Thin Films Deposited by Plasma Enhanced Chemical Vapor Deposition. Surfaces 2018, 1, 59–72. [Google Scholar] [CrossRef] [Green Version]
- Sharpe, W.N. Mechanical properties of MEMS materials. In Proceedings of the 2001 International Semiconductor Device Research Symposium. Symposium Proceedings (Cat. No.01EX497), Washington, DC, USA, 5–7 December 2001; pp. 416–417. [Google Scholar] [CrossRef]
- Sheikhaleh, A.; Jafari, K.; Abedi, K. Design and Analysis of a Novel MOEMS Gyroscope Using an Electrostatic Comb-Drive Actuator and an Optical Sensing System. IEEE Sens. J. 2019, 19, 144–150. [Google Scholar] [CrossRef]
- Ou, F.; Hou, Z.; Miao, T.; Xiao, D.; Wu, X. A new stress-released structure to improve the temperature stability of the butterfly vibratory gyroscope. Micromachines 2019, 10, 82. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiao, P.; Qiu, Z.; Pan, Y.; Li, S.; Qu, T.; Tan, Z.; Liu, J.; Yang, K.; Zhao, W.; Luo, H.; et al. Influence of electrostatic forces on the vibrational characteristics of resonators for coriolis vibratory gyroscopes. Sensors 2020, 20, 295. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, Q.; Hou, Z.; Kuang, Y.; Miao, T.; Ou, F.; Zhuo, M.; Xiao, D.; Wu, X. A tuning fork gyroscope with a polygon-shaped vibration beam. Micromachines 2019, 10, 813. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Gao, S.; Jin, L.; Liu, H.; Guan, Y.; Peng, S. Design and mechanical sensitivity analysis of a MEMS tuning fork gyroscope with an anchored leverage mechanism. Sensors 2019, 19, 3455. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.S.; An, B.H.; Mansouri, M.; Yassi, H.A.; Taha, I.; Gill, W.A.; Choi, D.S. MEMS vibrating wheel on gimbal gyroscope with high scale factor. Microsyst. Technol. 2019, 25, 4645–4650. [Google Scholar] [CrossRef]
- Guo, C.; Hu, Q.; Zhang, Y.; Zhang, J. Integrated power and vibration control of gyroelastic body with variable-speed control moment gyros. Acta Astronaut. 2020, 169, 75–83. [Google Scholar] [CrossRef]
- Steven, N. A Critical Review of MEMS Gyroscopes Technology and Commercialization Status; InvenSense: Sunnyvale, CA, USA, 2008. [Google Scholar]
- Belfiore, N.; Prosperi, G.; Crescenzi, R. A simple application of conjugate profile theory to the development of a silicon micro tribometer. In Proceedings of the ASME 2014 12th Biennial Conference on Engineering Systems Design and Analysis, Copenhagen, Denmark, 25–27 July 2014; Volume 2. [Google Scholar] [CrossRef]
- Cao, H.; Liu, Y.; Kou, Z.; Zhang, Y.; Shao, X.; Gao, J.; Huang, K.; Shi, Y.; Tang, J.; Shen, C.; et al. Design, fabrication and experiment of double U-Beam MEMS vibration ring gyroscope. Micromachines 2019, 10, 186. [Google Scholar] [CrossRef] [Green Version]
- Dong, Y.; Kraft, M.; Redman-White, W. Micromachined Vibratory Gyroscopes Controlled by a High-Order Bandpass Sigma-Delta Modulator. IEEE Sens. J. 2007, 7, 59–69. [Google Scholar] [CrossRef]
- Xia, D.; Chen, S.; Wang, S. Development of a prototype miniature silicon microgyroscope. Sensors 2009, 9, 4586–4605. [Google Scholar] [CrossRef] [PubMed]
- Verotti, M.; Crescenzi, R.; Balucani, M.; Belfiore, N. MEMS-based conjugate surfaces flexure hinge. J. Mech. Des. Trans. ASME 2015, 137. [Google Scholar] [CrossRef]
- Balucani, M.; Belfiore, N.; Crescenzi, R.; Verotti, M. The development of a MEMS/NEMS-based 3 D.O.F. compliant micro robot. Int. J. Mech. Control 2011, 12, 3–10. [Google Scholar]
- Belfiore, N.; Broggiato, G.; Verotti, M.; Crescenzi, R.; Balucani, M.; Bagolini, A.; Bellutti, P.; Boscardin, M. Development of a MEMS technology CSFH based microgripper. In Proceedings of the 2014 23rd International Conference on Robotics in Alpe-Adria-Danube Region (RAAD), Smolenice, Slovakia, 3–5 September 2014. [Google Scholar] [CrossRef]
- Ou, F.; Hou, Z.; Wu, X.; Xiao, D. Analysis and design of a polygonal oblique beam for the butterfly vibratory gyroscope with improved robustness to fabrication imperfections. Micromachines 2018, 9, 198. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Crescenzi, R.; Balucani, M.; Belfiore, N. Operational characterization of CSFH MEMS technology based hinges. J. Micromech. Microeng. 2018, 28. [Google Scholar] [CrossRef]
- Yeh, J.A.; Chen, C.N.; Lui, Y.S. Large rotation actuated by in-plane rotary comb-drives with serpentine spring suspension. J. Micromech. Microeng. 2005, 15, 201–206. [Google Scholar] [CrossRef]
- Chang, H.; Zhao, H.; Ye, F.; Yuan, G.; Xie, J.; Kraft, M.; Yuan, W. A rotary comb-actuated microgripper with a large displacement range. Microsyst. Technol. 2014, 20, 119–126. [Google Scholar] [CrossRef]
- Apostolyuk, V. Theory and Design of Micromechanical Vibratory Gyroscopes. In MEMS/NEMS: Handbook Techniques and Applications; Leondes, C.T., Ed.; Springer US: Boston, MA, USA, 2006; pp. 173–195. [Google Scholar] [CrossRef]
- Acar, D.C.; Shkel, A. MEMS Vibratory Gyroscopes: Structural Approaches to Improve Robustness; Springer Science: Boston, MA, USA, 2009. [Google Scholar]
- Xia, D.; Yu, C.; Kong, L. The development of micromachined gyroscope structure and circuitry technology. Sensors 2014, 14, 1394–1473. [Google Scholar] [CrossRef] [Green Version]
- Qin, Z.; Gao, Y.; Jia, J.; Ding, X.; Huang, L.; Li, H. The effect of the anisotropy of single crystal silicon on the frequency split of vibrating ring gyroscopes. Micromachines 2019, 10, 126. [Google Scholar] [CrossRef] [Green Version]
- Michel, G.; Daniel, J.R. Mechanical Vibrations: Theory and Application to Structural Dynamics; Wiley: Hoboken, NJ, USA, 2015. [Google Scholar]
- Tabeling, P.; Chen, S. Introduction to Microfluidics; OUP: Oxford, UK, 2010. [Google Scholar]
- Chang, H.; Zhang, Y.; Xie, J.; Zhou, Z.; Yuan, W. Integrated Behavior Simulation and Verification for a MEMS Vibratory Gyroscope Using Parametric Model Order Reduction. IEEE Sens. J. 2010, 19, 282–293. [Google Scholar] [CrossRef]
- Yang, B.; Lee, C.; Rama Krishna, K.; Xie, J.; Lim, S. A MEMS rotary comb mechanism for harvesting the kinetic energy of planar vibrations. J. Micromech. Microeng. 2010, 20, 065017. [Google Scholar] [CrossRef] [Green Version]
- Theory of Elasticity; Engineering Societies Monographs; McGraw-Hill Education (India) Pvt Limited: Mumbai, India, 2010.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value |
|---|---|
| Young Modulus | 158 GPa |
| Density | 2380 Kg/m |
| Fracture strength | 1.21 GPa |
| Poisson’s module | 0.22 |
| Resonance frequency | 21 KHz |
| Name | Value |
|---|---|
| Sensor Area | 600 m × 600 m |
| Sensor Thickness | 2 m |
| Drive Mass Length | 100 m |
| Sense Mass Length | 50 m |
| Number of actuation comb-drives | 15 |
| Number of sense comb-drives | 6 |
| Sense cantilever beam length | 182 m |
| Sense cantilever beam width | 3 m |
| Drive cantilever beam length | 60 m |
| Drive cantilever beam width | 2 m |
| Connector radius | 7.5 m |
| Annulus connector radius | 60 m |
| Name | Value |
|---|---|
| Young Modulus | 160 GPa |
| Density | 2320 Kg/m |
| Poisson’s module | 0.23 |
| Xia Gyroscope | L3G4200D | Tri-Axis Planar Gyroscope | |
|---|---|---|---|
| (Academic Research) | (Commercial) | (Present Work) | |
| Natural frequency | 8 KHz | 20 KHz | 20 KHz |
| Q-factor | 500 | 200 | 60 |
| Minimum angle | (/s) | (/s) | (/s) |
| Sensitivity | F/(/s) | 70 m (/s)/digit | F/(/s) |
| Sense linearity | 0.17% | 0.2% | 0.7% |
| Dimensions [m] | |||
| Range | ±500 (/s) | ±2000 (/s) | ±115,000 (/s) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Crescenzi, R.; Castellito, G.V.; Quaranta, S.; Balucani, M. Design of a Tri-Axial Surface Micromachined MEMS Vibrating Gyroscope. Sensors 2020, 20, 2822. https://doi.org/10.3390/s20102822
Crescenzi R, Castellito GV, Quaranta S, Balucani M. Design of a Tri-Axial Surface Micromachined MEMS Vibrating Gyroscope. Sensors. 2020; 20(10):2822. https://doi.org/10.3390/s20102822
Chicago/Turabian StyleCrescenzi, Rocco, Giuseppe Vincenzo Castellito, Simone Quaranta, and Marco Balucani. 2020. "Design of a Tri-Axial Surface Micromachined MEMS Vibrating Gyroscope" Sensors 20, no. 10: 2822. https://doi.org/10.3390/s20102822
APA StyleCrescenzi, R., Castellito, G. V., Quaranta, S., & Balucani, M. (2020). Design of a Tri-Axial Surface Micromachined MEMS Vibrating Gyroscope. Sensors, 20(10), 2822. https://doi.org/10.3390/s20102822