1. Introduction
Tactile sensing in human and animal skins enables them to touch, sense temperature, etc. The haptic perception, if added to robots, can significantly enhance their performance through better human-robot and robot-environment interactions. In comparison, even the most sophisticated robots have at most a few dozen tactile sensors. Regardless of over thirty years of research, tactile sensing still falls behind progress in computer vision methods. The reason for this discrepancy is that compared to cameras, tactile sensors must be compliant, tough and flexible enough to coat the surfaces of robotic limbs and hands. In addition, as the number of sensors increases, wiring and signal transfer become a major issue [
1,
2,
3,
4,
5].
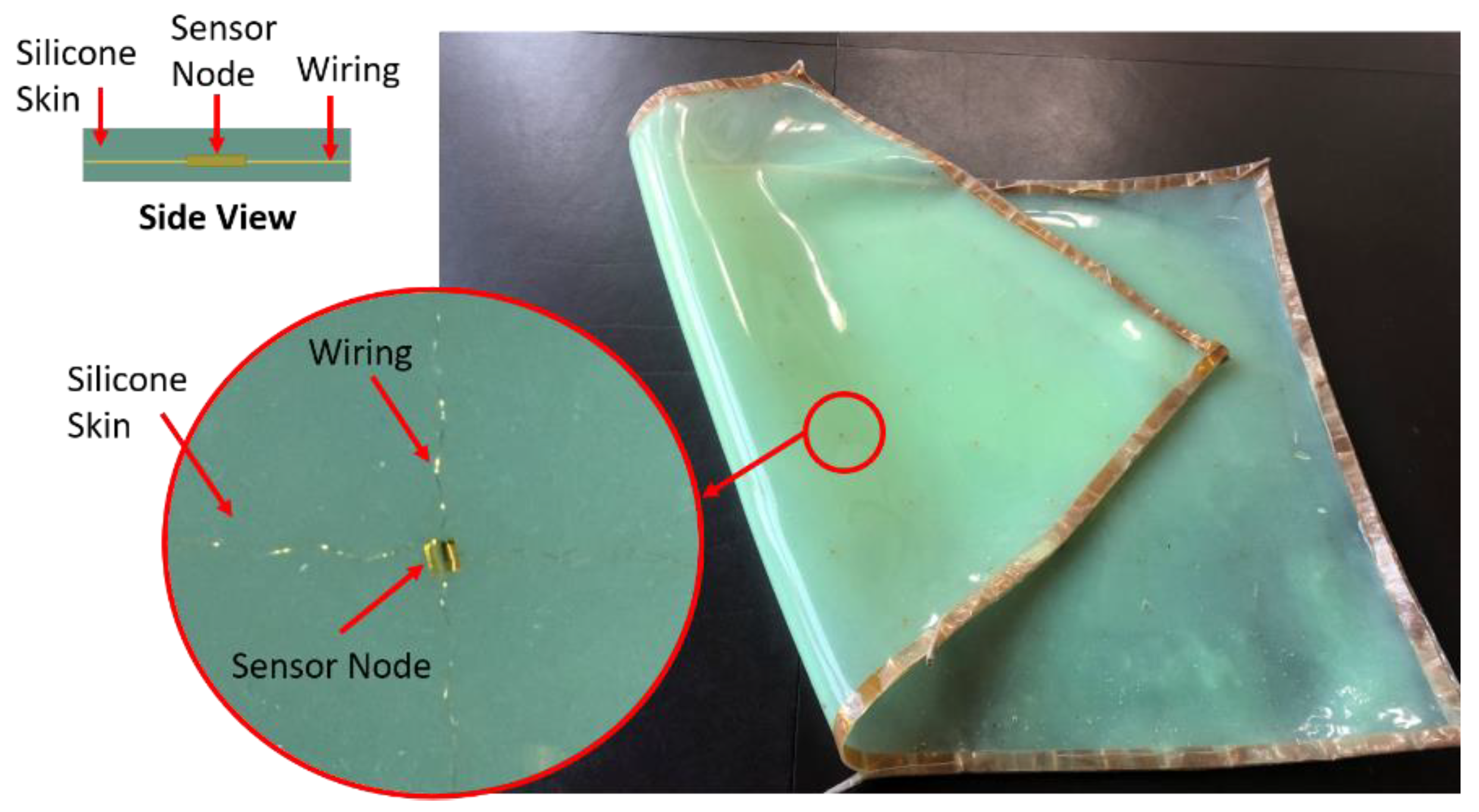
To overcome the aforementioned challenges for robotic tactile sensing, Stanford Structures and Composites Laboratory (SACL) developed a smart skin shown in
Figure 1 by embedding a multi-modal stretchable sensor network [
6] into a soft silicone. Guo [
7] has documented in detail the fabrication and material selection process of this skin. This artificial skin has been added to a robotic arm for realizing autonomous control, which leverages advanced sampling-based motion planning techniques [
7]. Utilizing the signals of the multi-modal sensors, which are embedded in the skin in state awareness algorithms as input parameters, the robotic arm can sense and react to environmental changes such as temperature variance and local dynamic impacts onto the skin [
7]. However, one critical aspect in tactile sensing has not been well studied, which is how to detect static pressure in the smart skin using lead zirconate titanate (PZT) elements, also known as piezoelectric sensors.
There exist different tactile sensors for measuring static pressure and contact conditions using different transduction mechanisms [
8,
9,
10,
11]. Resistive-based tactile sensors can reach high sensitivity, but have high power consumption and lack the measurement of contact forces [
12]. Optical tactile sensors are also capable of reaching high sensitivity, although they will show loss of light due to micro bending chirping. Meanwhile, power consumption is also a big challenge [
12]. Triboelectric tactile sensors have the advantage of being self-powering, although their long-term unreliability is still an issue [
13]. One of the most common tactile sensors are capacitive tactile sensors, which can achieve high sensitivity [
4]. However, noises coming from temperature and humidity variations, and even electrical noise introduced by unshielded power supplies, may significantly decrease the capacitive signal-to-noise ratio. This issue imposes a signal conditioning stage in order to obtain a high signal-to-noise ratio, which results in complex circuitry [
4]. In addition, under highly repetitive loads, the capacitive sensors are prone to failure due to mechanical fatigue, which undermines the reliability of the method [
14].
Compared with capacitive sensors, PZT sensors are excellent in terms of mechanical robustness and their simplicity of use and noise resistance. Piezoelectricity in PZT is a well-known transduction mechanism for dynamic force measurement by using the direct piezoelectric effect. However, a different mechanism is required to sense static loads using PZT sensors. One promising method is to use PZT sensors in a resonant piezoelectric sensing mode. Safour and Bernard [
15] demonstrated that the measured electric admittance spectrum of a PZT sensor can be correlated to the static forces applied to the PZT sensor. Although their study was focused on the applied force in the order of 100 N, which is relatively high, and applied directly on the PZT sensor, their results showed the possibility of this method for tactile sensing. In general, tactile sensing requires a higher resolution, and sensors must be embedded in a skin material. Such inclusion of the sensors inside skin material like silicone rubber or fiberglass can prevent sensors from direct contact with external environments, which may damage the sensors. Shin [
14] also investigated the effect of static load on PZT sensors by using impedance measurement. Their results showed a decrease in the impedance value at anti-resonance frequencies, with increasing applied load. However, their work demonstrated a force resolution of 10 N, and has not been proven theoretically or numerically. Ozeri [
16] also experimentally investigated the static force measurement by PZT sensors. However, the minimum detectable load in their work was still very large, at about 17.67 N (25 kPa on a circular area of 30 mm in diameter). In this paper, an electromechanical impedance (EMI)-based method is used as the diagnostic approach to investigate the ability of the proposed smart skin for sensing static pressure loads. Differently than other studies, however, we especially focus on the detection for small amounts of normal loads (0.5 N as the resolution). Furthermore, such active sensing methods are considered to be more simplified than passive sensing, as they eliminate the required power supply throughout the operation time.
5. Finite Element Simulation Study
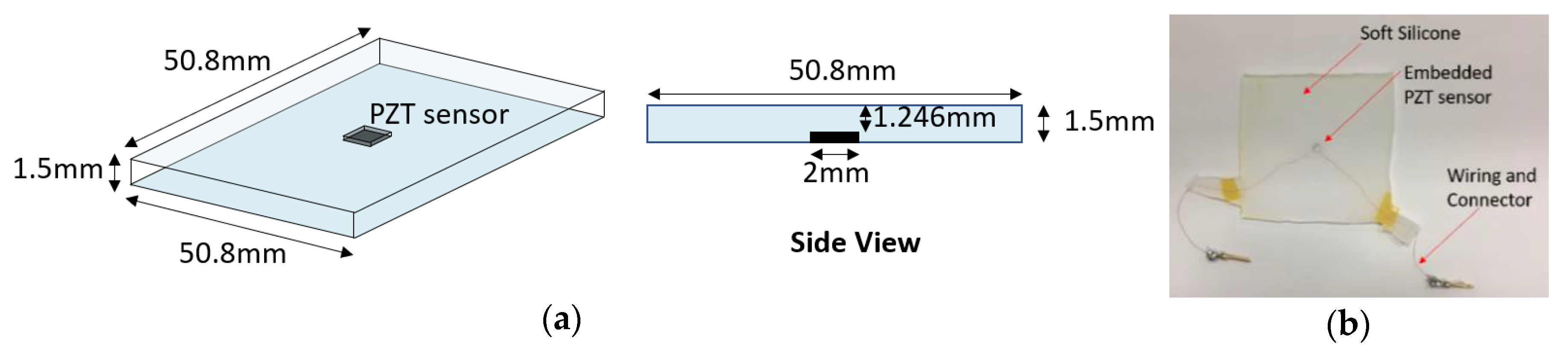
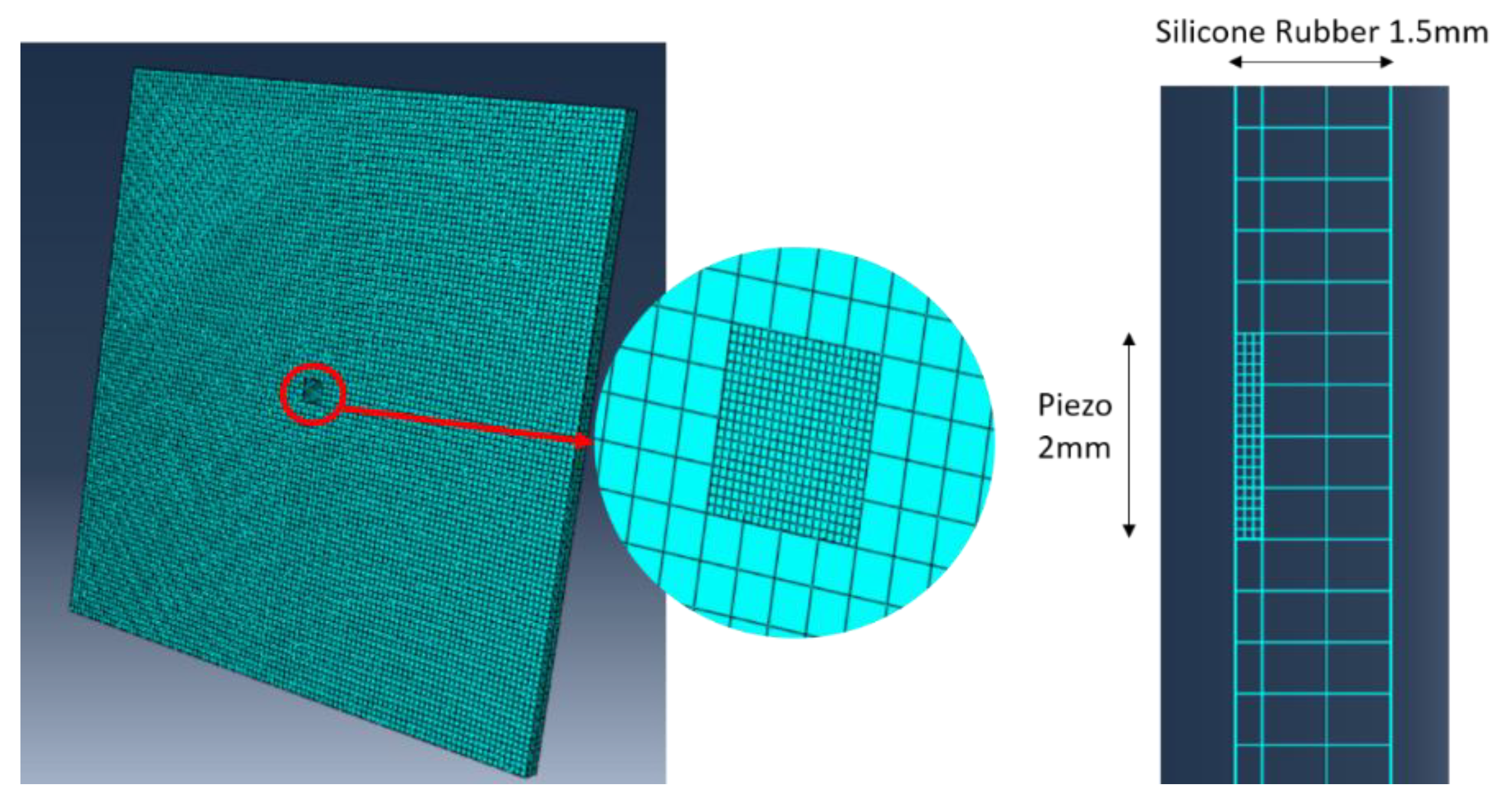
To model the electromechanical impedance (EMI) response of the embedded lead zirconate titanate (PZT) sensors, a finite element model (FEM) was created using the commercial software Abaqus 6.12. The objective of the simulation was to obtain qualitative insights into the resonant behaviors of the embedded PZT sensors under the applied static pressure loads. The dimensions of the model were identical to what is shown in
Figure 3, and the mechanical material properties of this piezoelectric material are shown in
Table 2. The direct piezoelectric matrix [d] and permittivity [e] are shown in matrix (2) and (3) respectively. The C3D8E elements, which stand for solid elements with built-in piezoelectric properties, were applied to model the PZT sensor. The mesh size of the PZT sensor was set to 100 µm, based on the previous convergence study [
18]. The EMI of the PZT sensor was calculated over the frequency domain from 0.5 MHz to 1.5 MHz, with an interval of 10 kHz. Considering this frequency range and the typical mechanical wave speed in silicone rubber, which is around 1000 m/s [
19], the wavelength of acoustic waves in the silicone rubber material varies from 0.67 mm to 2 mm. Therefore, the mesh size of the silicone was chosen as 0.5 mm to ensure that it was fine enough to capture the response over the desired frequencies. The FEM model and mesh sizes are shown in
Figure 8. The interaction between the PZT sensor and silicone was defined in both tangential and normal direction: the tangential behavior was defined with a friction coefficient of 0.9 [
20], and the normal behavior was set as “Hard” contact.
5.1. Hyperelastic Material Property of Silicone Rubber
One key factor dominating the impedance behavior of the embedded PZT sensor is the hyperelastic material property of the silicone rubber material. The stress-strain relationship of hyperelastic materials such as silicone rubber is normally defined as nonlinear elastic and incompressible [
17,
21]. Sparks et al. [
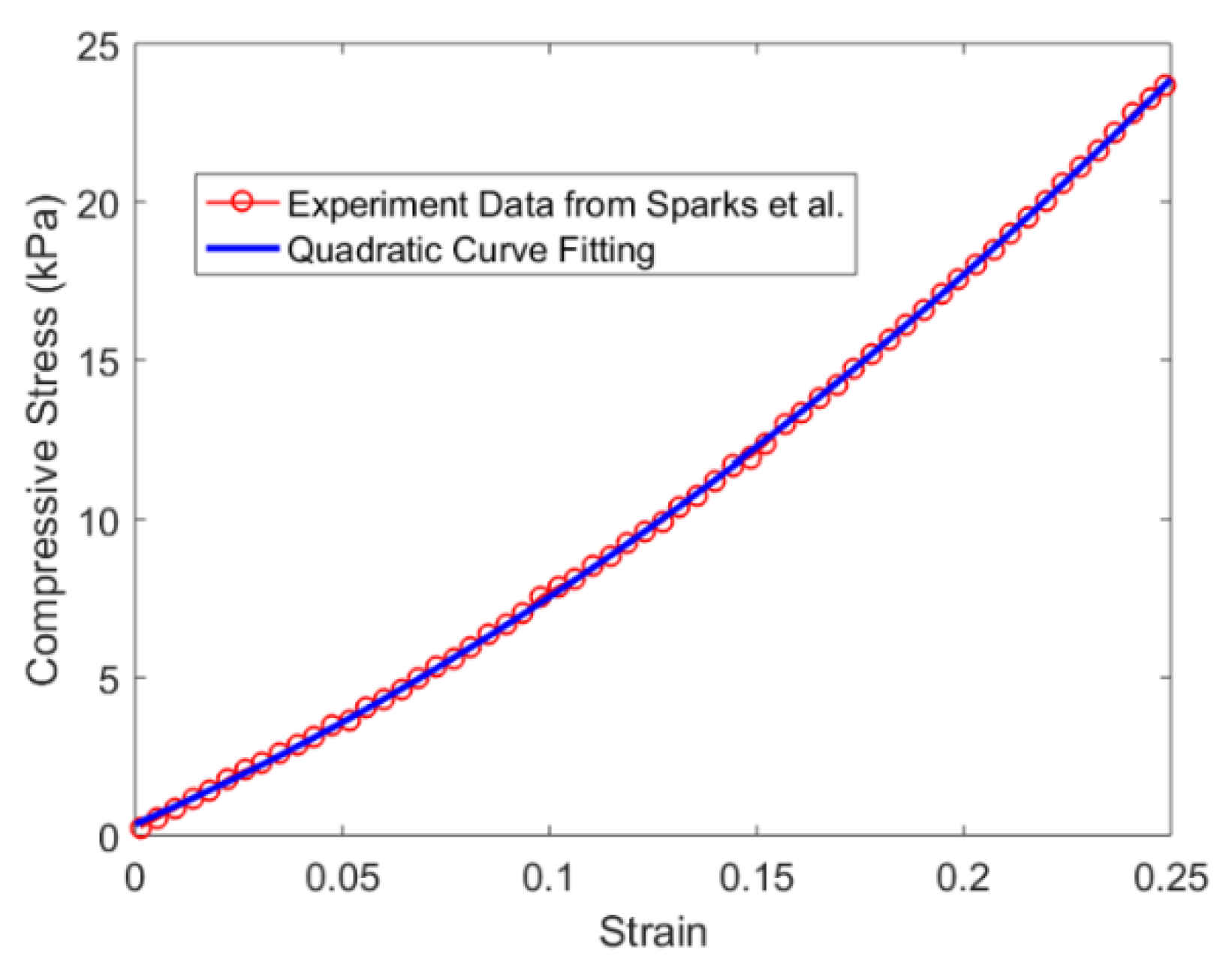
17] demonstrated the stress and strain relationship shown in
Figure 9 under a static compressive load for the Smooth-On Ecoflex 00-30, which is the silicone rubber used in our experiment. It shows a clear nonlinear behavior, which indicates that the stiffness of this silicone material increases with the applied load.
Therefore, to correlate the stress level to the silicone’s stiffness change, the stress and strain relationship from Sparks’ experiment result was fitted into a quadratic curve, which is also plotted in
Figure 9. This quadratic curve is presented explicitly in Equation (4), where S denotes stress and ε denotes strain. The stresses at each load increment in the experiment were used to calculate the corresponding strains using Equation (4). These strain values were then used to obtain the corresponding stiffness as the slope of the quadratic curve at each stress level.
Table 3 shows the values of stress, strain and stiffness at each load increment. Note that the weight of the rigid composite plate, which is 1.5 g and used for even pressure distribution, was also taken into consideration.
5.2. Dynamic Compressive Behavior of Silicone Rubber Material
The stress-strain relationship in
Figure 9 was measured under a static compressive load. In our simulation, however, the interaction between the PZT sensor and silicone rubber was highly dynamic at the frequency level of megahertz. Therefore, the silicone rubber was driven by the PZT sensor under dynamic strains. This means that this stress-strain curve for the silicone rubber needs to be modified, considering this load rate effect. In highly viscous materials such as silicone rubber, the stress-strain curve is greatly dependent on the applied strain rates. Song et al. [
22] experimentally determined the dynamic compressive stress-strain relationships of an ethylene propylene-diene monomer copolymer (EPDM) rubber at various strain rates. Their test results showed that at the true strain of 0.1, as the strain rate increases from 653 Hz to 4730 Hz, the true stress increases from 1.0 MPa to 7.0 MPa, which is seven times higher in stiffness. It is also observed that the nonlinear behavior of the hyperelastic materials still holds, regardless of the increase of the strain rate. Based on the fact from this study that with the 7.24 times increase of the strain rate, the stiffness increased by seven times. Therefore, in our simulation, the stiffness values in
Table 3 were amplified by the same amount. This amplification factor is already quite conservative, considering that the frequency range in our simulation is on the orders of 10
6 Hz. Again, the objective of this simulation study was to obtain qualitative insights into the impedance behavior of the embedded PZT sensor. Therefore, by amplifying seven times, the stiffness was good enough to capture the change of the impedance behavior.
Taking into account both the hyperelastic property and dynamic effect on the silicone rubber stiffness, in order to simulate the static pressure load effect onto the smart skin sample, the following stiffness values were used to represent each corresponding loading status, as shown in
Table 4.
5.3. A Direct Steady-State Dynamic Analysis for Simulating Impedance Behavior
A direct steady-state dynamic analysis was performed using Abaqus 6.12. A zero displacement in the
x,
y and
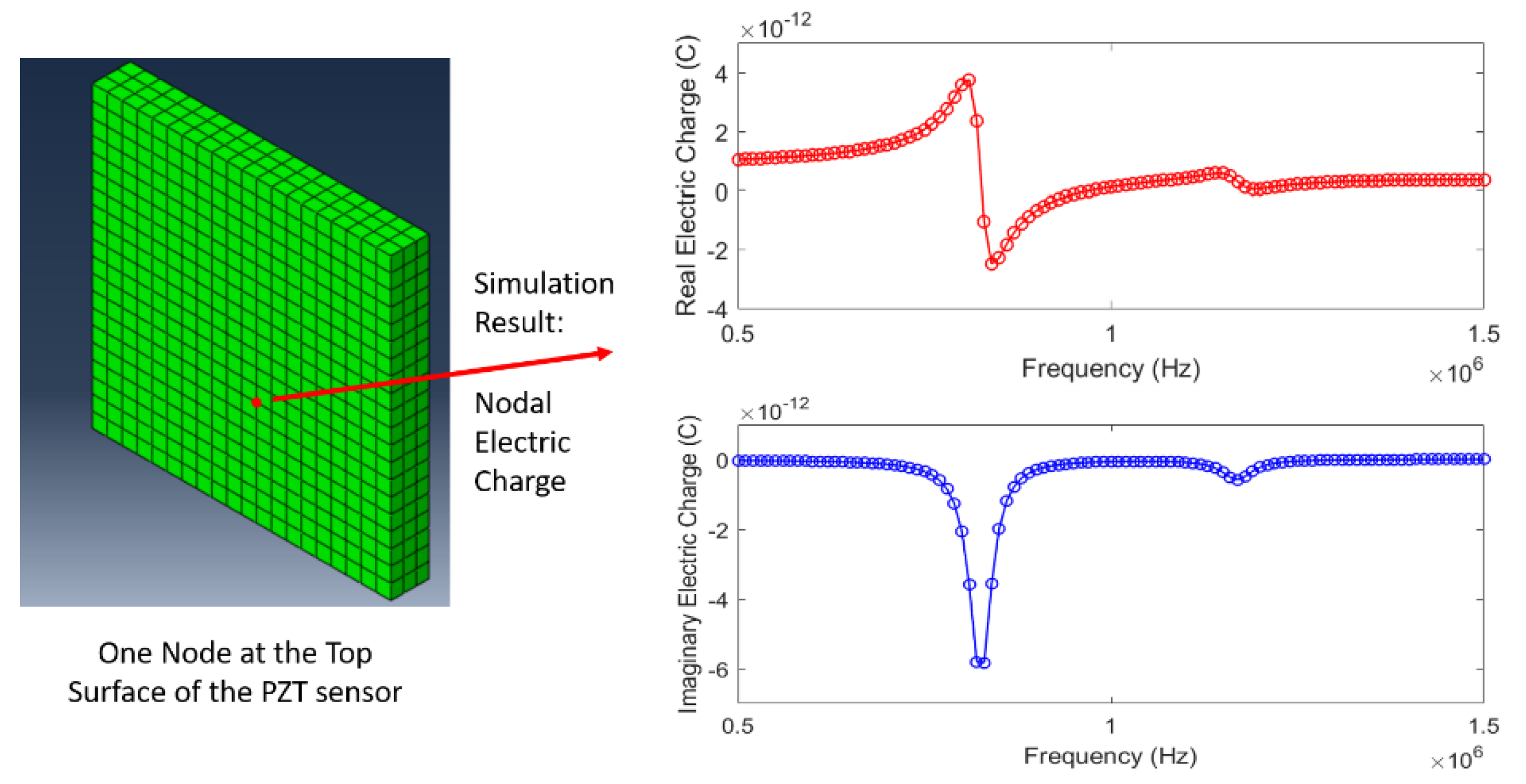
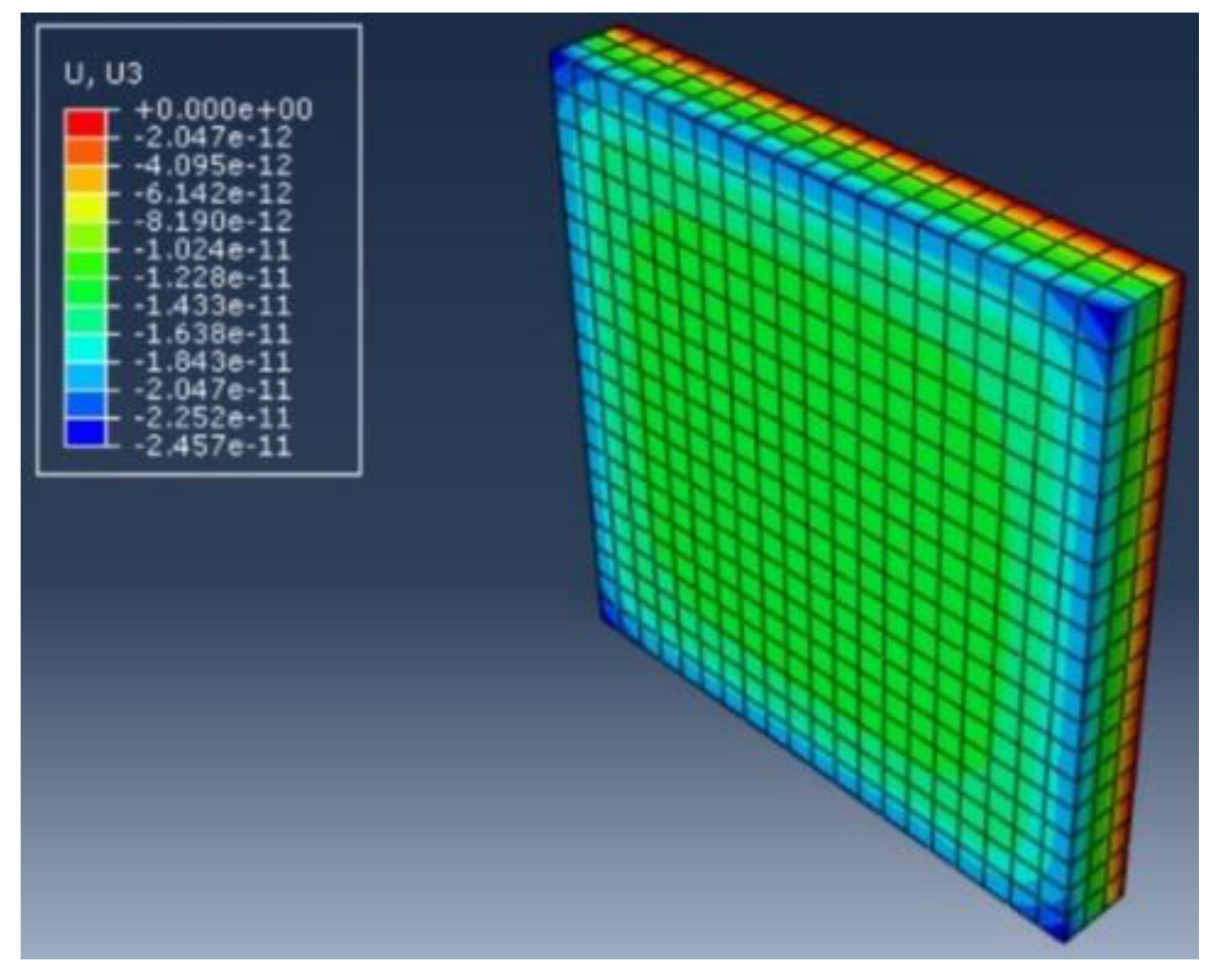
z directions on the bottom surface of the skin was considered as mechanical boundary conditions. The following electrical boundary conditions were applied to the sensor: a constant voltage of 1 V in magnitude and 0 in phase at the top surface electrode of the PZT sensor, while the bottom surface electrode was fixed as the ground of 0 V. For each simulation, the nodal electric charges at the top surface electrode were extracted and summed to compute the total electrical charge (Q).
Figure 10 shows the simulation result of the nodal electric charge at one node at the top surface. Again, the total electric charge (Q) is the summation of these nodal electric charges over all the nodes at the top surface of the PZT sensor.
After obtaining the total electric charge (Q), the current in the transducer can be determined by the following equation
where ω is the angular frequency of the applied actuation voltage.
The impedance was then calculated using Equation (6)
where V is the voltage difference across the PZT sensor, which was 1 V. Note that the impedance is in a complex form.
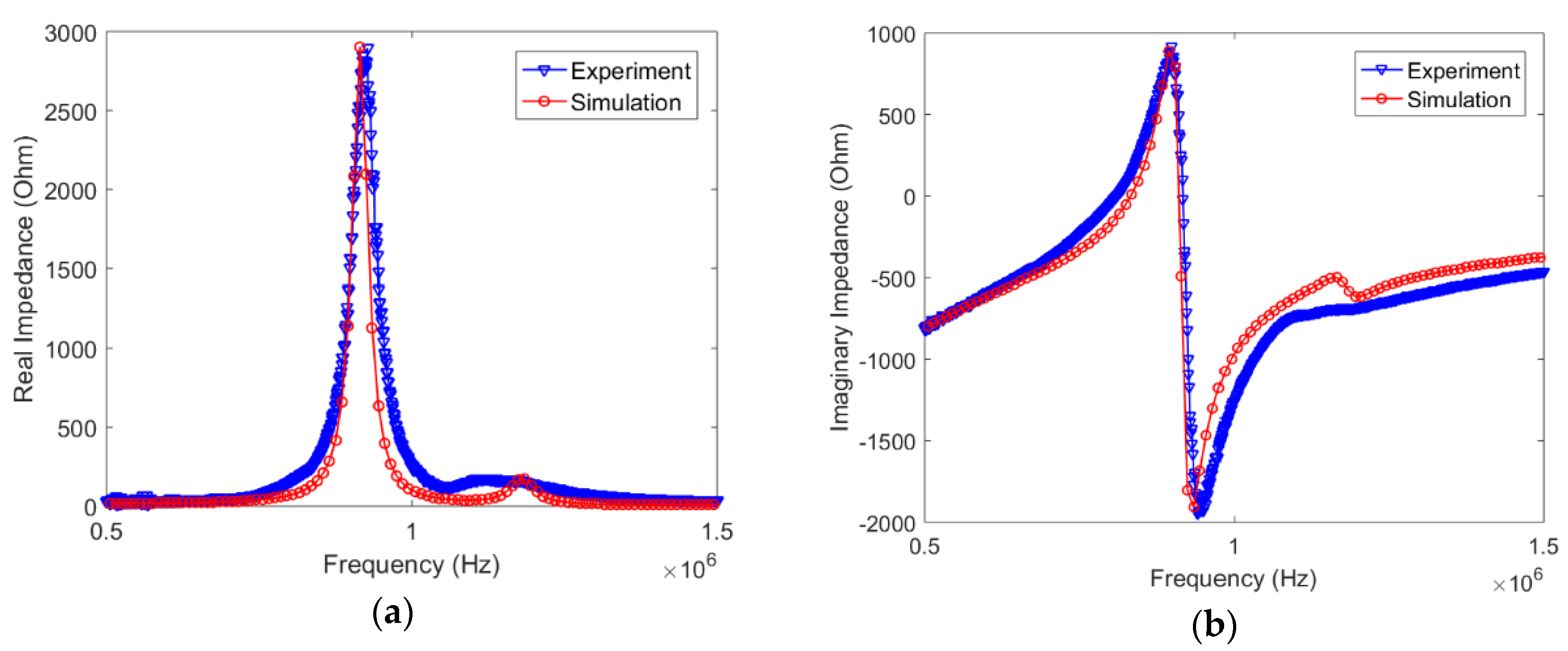
Figure 11 illustrates the simulation results, including both real and imaginary parts of the impedance response at baseline state (0 pressure load). For comparison, the experimental results were also plotted in the figure, and show good agreement with the simulation results. Here, in order to match the amplitude of the first resonant peak in the experiment, a structural damping coefficient of 0.04 for the PZT sensor was used in the simulation. Although the damping coefficient is very difficult to be accurately determined by experiments [
18], its value used in this simulation was assumed to be the closest estimation towards our experiment. Again, the purpose of this numerical study was to gain a qualitative understanding about the effect of normal pressure loads to the impedance behavior of the PZT sensors embedded in the silicone rubber.
5.4. The Effect of the Silicone Rubber Stiffness to the Impedance Response
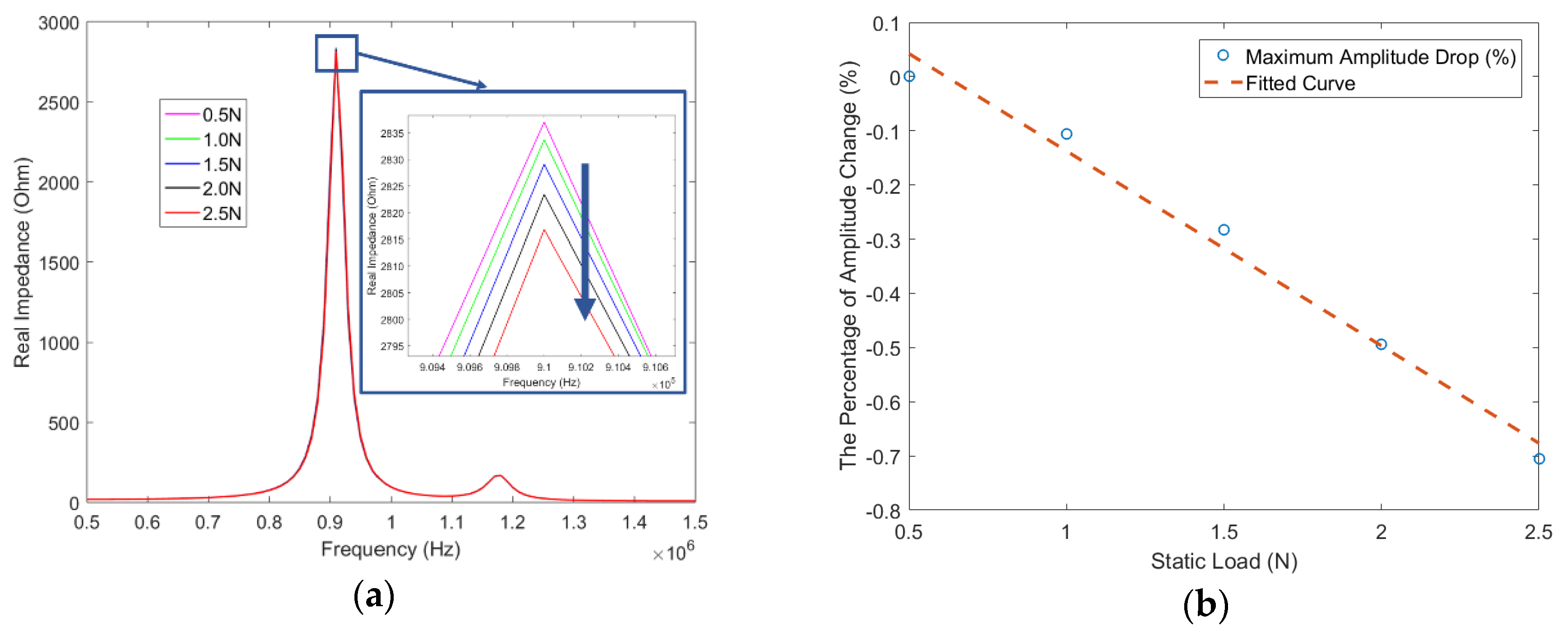
To study the effects of changing the stiffness of the silicone rubber, different dynamic stiffness values at each static normal pressure level were used in the numerical model, and the corresponding impedance response was then obtained for each stiffness state.
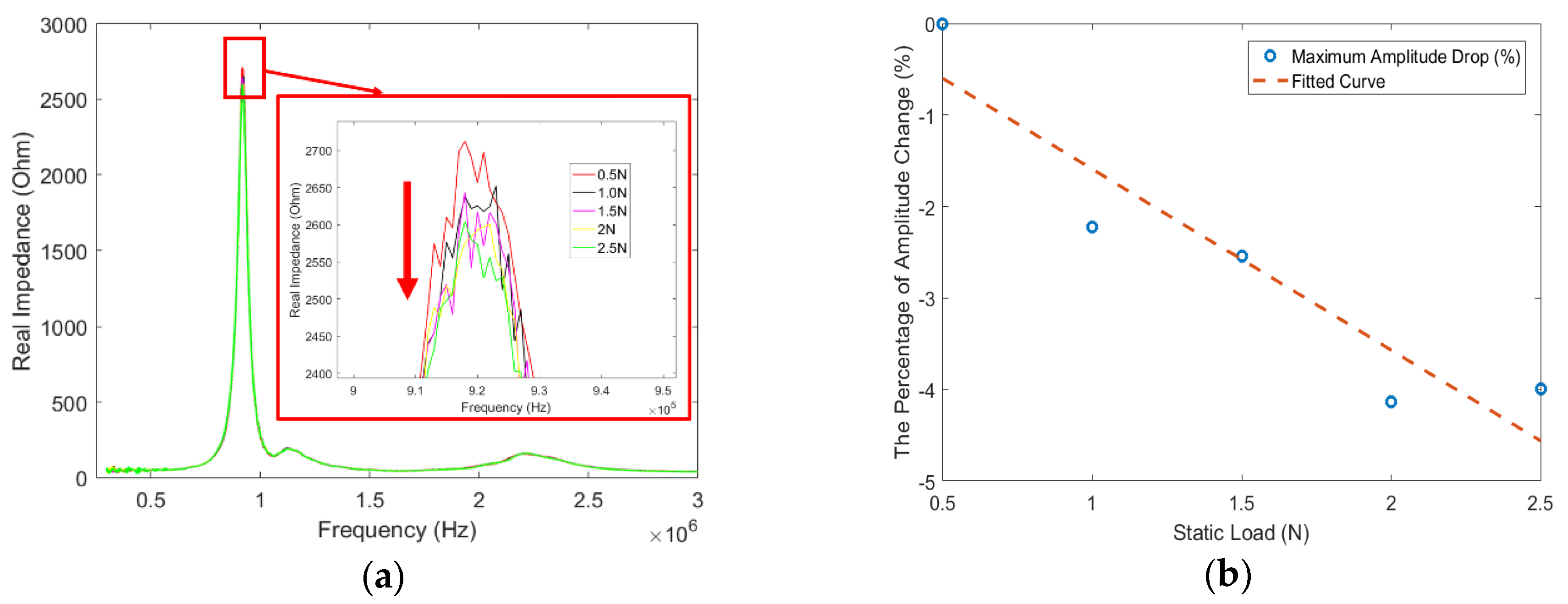
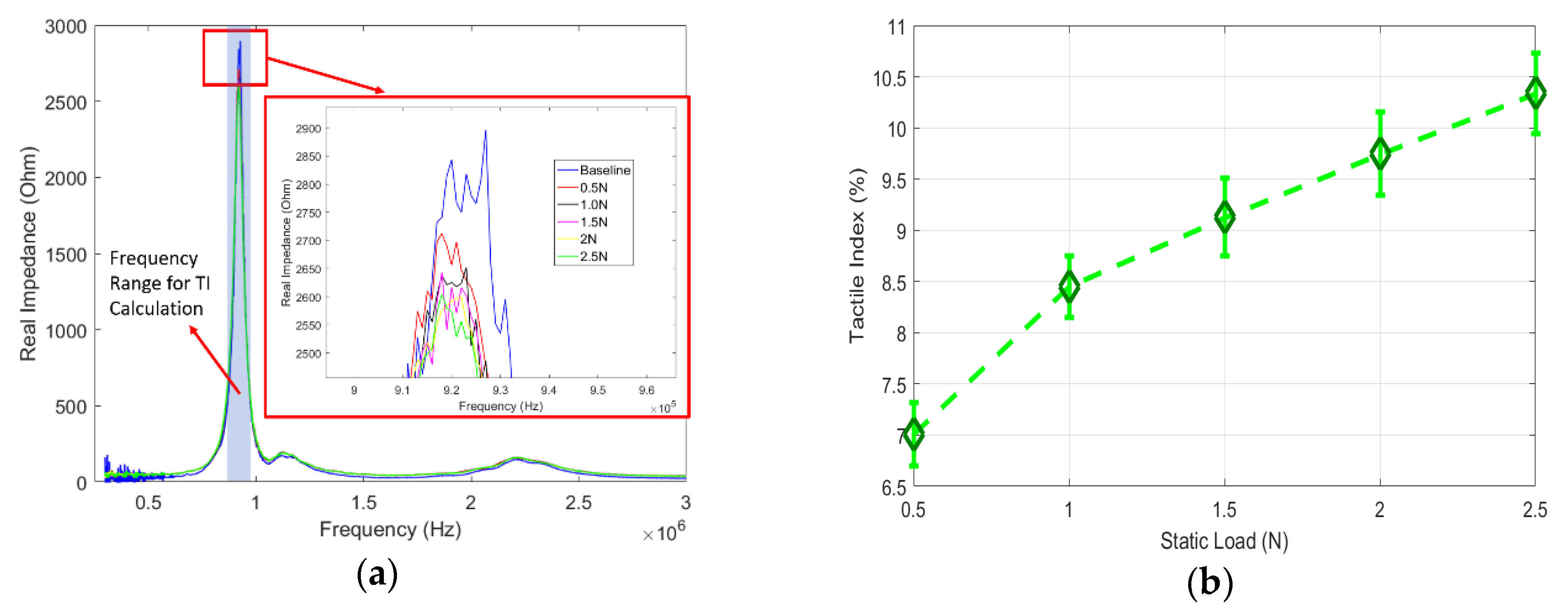
Figure 12a shows the real part of the impedance responses at each normal pressure state. The impedance peak decreases with the increase of the static normal pressure. As shown from
Figure 12b, a similar trend was observed in the experiment results in
Figure 6b. This verified our assumption that the static normal pressure load changed the stiffness of the hyperelastic silicone material, which eventually contributes to the impedance behavior change of the embedded PZT sensor.
7. Conclusions and Future Work
Based on the robotic electronic skin technology developed by Stanford Structures and Composites Laboratory, this work is focused on the study of tactile sensing for static pressure using an electromechanical impedance-based method. A smart skin sample with an embedded lead zirconate titanate (PZT) sensor was fabricated, and a set of static pressure load experiments were performed. The collected impedance data from the embedded PZT sensor showed a consistent decrease in the amplitude of first peak in the real part impedance, with the increase of the applied static pressure load. A diagnostic method was proposed, which can successfully distinguish a force resolution of 0.5 N. A numerical simulation was performed to verify the change of the impedance response in the experiment, which is closely related to the stiffness change of the silicone rubber due to load effects. Finally, based on the theoretical model, different effects for the impedance response were discussed. Again, the stiffness change of the silicone rubber skin due to applied static pressure was proven to be the dominant factor for the impedance change in this study.
Future work includes: (a) applying this transduction mechanism to a real robotic gripper to realize the dexterous manipulation of pick and drop; (b) investigating higher static pressure load range, where not only the silicone material property will change, but so too will the piezoelectric material property; and (c) studying the impedance response to other load conditions, such as non-uniform stress.


 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}