1. Introduction
LiDAR, an acronym for Light Detection and Ranging, uses laser pulses to take range measurements employing the time-of-flight measurement principle. From these measurements, combined with the LiDAR pose, it is possible to generate a 3D map of the environment. First, the unit sends out a laser pulse, then a sensor on the instrument measures the return signal, and the amount of time it takes for the pulse to bounce back is measured. As light moves at a constant speed, the LiDAR unit can accurately calculate the distance between itself and the target.
Although LiDARs cannot see colors, they have several other properties that favorably apply to automotive and industrial perception systems. Compared to radar, it can obtain much higher spatial resolution owed to the shorter wavelengths, and although it will not see through dense fog, rain, or snow, it performs much better than visible spectrum cameras in adverse weather conditions [
1]. Furthermore, while camera triangulation ranging precision falls as the distance to the target increases, LiDAR’s precision can theoretically remain constant [
2].
In a presentation [
3] at AutoSens, Brussel 2018, Watts states that autonomous cars must be able to separate a person from a bridge column on the highway from a 200
distance. He explains that this requires, for example, a spatial resolution of 20 cm which corresponds to an angular resolution of 1
or
°. However, no spinning LiDARs today can obtain that high resolution.
Three-dimensional spinning LiDAR scanners that make use of multiple lasers were invented in the mid-2000s. In recent years, however, there has been common opinion that this design—which involves mounting several lasers, for example 8, 16, 32, 64 or 128, onto a rotating gimbal—would soon be rendered obsolete by a new generation of emerging low-cost solid-state LiDAR sensors that use a single stationary laser to scan a scene [
4].
As explained in [
5], there are three main types of solid-state LiDARs: First, the
flash LiDAR uses a light source that floods the entire field of view at once, using a pulse like a camera flash. A time-of-flight imager receives that light and calculates a depth image. However, due to cost and eye-safety considerations, range is typically limited. Second,
phased arrays use a microscopic array of individual antennas. By controlling the timing (phase) between these antennas, the beam can be controlled in a specific direction. The method is promising, but only Quanergy has made sensors using this principle so far. Third,
microelectromechanical system (MEMS) mirrors are not truly solid-state as there are microscopic moving parts. However, the tiny form factor provides many of the same cost benefits. Here, a single laser (in general) is directed at a spinning mirror to scan a single plane. Furthermore, to add a dimension, a second controlled mirror is needed. Alternatively, a single mirror is actuated around two axes. MEMS mirrors can be susceptible to shock, vibrations and misalignment caused by big changes in temperature. Therefore, the sensor may require recalibration at some point.
The solid-state LiDARs are expected to outperform spinning LiDAR in many applications. However, the classic spinning design still has some advantages. The most obvious one is the omnidirectional horizontal 360° FOV. A LiDAR unit can be placed on the top of a car and get a complete view of a car’s surroundings. Solid-state LiDARs, in contrast, typically have a FOV of 120° or less. It would take at least four solid-state units to achieve coverage comparable to a spinning LiDAR.
Another less obvious advantage is that eye-safety rules allow a moving laser source to emit at a higher power level than a stationary one. With a scanning solid-state unit, putting your eye centimeters from the laser scanner could cause 100% of the laser light to flood into the eye. However, with a spinning sensor, the laser is only focused in any particular direction for a fraction of its 360° rotation. A spinning LiDAR unit can therefore put more power into each laser pulse without creating risk of eye damage. Furthermore, spinning LiDARs typically have much larger apertures compared to solid-state sensors. A larger aperture means more emitted energy and range. The large aperture also makes the sensor less susceptible to “the dead bug problem”, i.e., occlusions from small particles [
6]. Hence, spinning units may have a range advantage over stationary ones for at least another decade.
However, if the applications require less than 360° horizontal FOV, using the spinning LiDAR directly will be inefficient as a possibly large portion of the laser beams will be directed away from the target scene and must be discarded. The information carried by the discarded measurements will be wasted and the cost of the useful measurements will be very high. E.g., if only 120° horizontal FOV is needed, applying a spinning LiDAR would discard 67% of the measurements. Using the full capacity of the LiDAR in applications with a need for less than 360° horizontal FOV is therefore a problem worth solving.
In this paper, the solution to the aforementioned problem is to provide a reflector device that maintains the advantages of the spinning LiDAR while providing a reshaped LiDAR beam which may be directed towards a target. Such a LiDAR beam distribution will ensure that all or most of the LiDAR beam is directed towards the target and thus with knowledge also of the beam reflected from the target.
The mirrors of the reflector give the LiDAR multiple viewpoints to the target. Ultimately, it is argued that this can enhance the object revisit rate, instantaneous resolution, object classification range, and robustness against occlusion and adverse weather conditions. Consequently, the reflector design enables long-range rotating LiDARs to achieve the robust super-resolution needed for autonomous driving at highway speeds.
This simple, yet highly effective, reflector device is validated in various configurations using optical simulations, pattern simulations, and experimental prototype results.
2. Related Work
It is desirable to use all the data from spinning LiDARs as it is an expensive resource. Even so, a hollow cone comprised of multiple flat mirror segments surrounding the LiDAR to use the full 360° FOV has never been demonstrated in the literature. The concept has only been described by patent applications [
7,
8] where the latter is part of this work.
However, previous work has used mirrors to redirect LiDAR beams. In [
9], Matsubara and Nagatani point out that an omnidirectional LiDAR should be installed on the top of a mobile robot to measure omnidirectionally. However, in this position, the undetectable area close to the robot is often too large. As the authors were instrumenting an inspection robot moving mainly forward, they installed the LiDAR at the front of the robot. However, in this case, the robot body blocked the laser rays behind the sensor, and half of the sensor information that could be acquired originally was invalidated. To use some of the rear-facing LiDAR points, they added two stationary flat mirror segments. Here, the two mirrors are tilted down to increase the vertical FOV of the LiDAR such that objects can be detected in the near vicinity of the vehicle.
Two flat stationary mirrors were also used by [
10]. However, here the two mirrors were used in combination with a 2D spinning LiDAR. The assembly was placed on an unmanned aerial vehicle (UAV) to create a constant altitude flight system. The mirrors were placed at the rear end such that the sensor could observe objects in front of the UAV while measuring the vertical distance between the targeted surface and the UAV.
Commonly, rotation is applied to a 2D LiDAR to create a 3D scanner. In [
11], the authors constructed a device consisting of a vertical 2D spinning LiDAR mounted between two mirrors in a pan rotational mechanism. The mirrors increased the instant point cloud resolution by reorienting the rear-facing measurements. Furthermore, the pan mechanism enabled the device to obtain a 3D point cloud at high density by scanning the scene to accumulate points. In [
12], the authors share their design for both rolling and pitching 3D scanning using a 2D LiDAR. Another tilting scanner using a 3D LiDAR was demonstrated in [
13]. Here, the authors proposed a simulation-based methodology to analyze 3D scanning patterns which was applied to investigate the scan measurement distribution produced by a rotating multi-beam LiDAR. A Velodyne VLP-16 was used with the tilting mechanism to create high-resolution 3D scans.
Common for the moving LiDAR scanning applications is the fact that they are not suitable for rapidly changing environments as motion blur will occur. Furthermore, by adding additional moving parts to a sensor, the complexity increases while the robustness decreases. Thus, such scanning solutions may not be applicable in autonomous vehicles moving rapidly in a dynamic environment.
In addition to the possible loss of data from occlusion, it is well documented by [
14] that traditional rotating LiDARs have severely reduced performance in adverse weather conditions such as dense fog, rain and turbulent snow. The authors discovered, in a turbulent snow driving experiment, that all tested sensors were blocked by the powder snow and their viewing distance was shortened. One of the tested LiDARs was able to produce points that directly showed the presence of snow, but in the remaining sensors its presence was only observable by missing points in their point clouds.
The Canadian Adverse Driving Conditions (CADC) dataset, presented in [
15], contains LiDAR measurements in light, medium, heavy and extreme snowfall conditions. Here, the snowfall condition was classified using Dynamic Radius Outlier Removal (DROR)[
16] which is a method for removing snow noise in point cloud data. In [
15], Pitropov et. al illustrate that more filtered points correspond to heavier snowfall.
The solid-state LiDAR is commonly considered the next step in LiDAR technology. However, there are currently few qualitative independent publications verifying their actual performance. To the authors’ knowledge, most of the available information origins from specifications that have not been confirmed.
Nevertheless, the advantages of using custom scanning patterns should be considered. For example, the iDAR (intelligent Detection and Ranging) from AEye that does not apply a traditional scanning pattern. Hence, to further promote the benefits of a dynamic scanning pattern, AEye has written a whitepaper proposing a new method of evaluating LiDAR metrics [
17]. Here, they emphasize three main metrics: First, they suggest extending the metric of frame rate to include
object revisit rate, i.e., the time it takes the LiDAR to get successive measurements on an object of interest. The iDAR can revisit an object within the same frame while a spinning LiDAR must typically wait until the next complete scan. Second, they propose to extend the traditional resolution metric to
instantaneous resolution which describes the degree to which a LiDAR sensor can apply additional resolution to key areas within a frame. Third, they wish to change the focus from object detection range to
object classification range which is the range where the sensor obtains sufficient data to classify an object.
3. Design and Theory
The proposed reflector was designed using a plurality of trapezoid-shaped segments, where the mirrors were arranged on these segments inside a hollow truncated cone. Only flat mirrors were used to avoid divergence of the collimated beam This reflector design allows the centrally placed spinning LiDAR to obtain multiple point of view (POV) measurements of objects placed in zones that are overlapped by multiple mirrors.
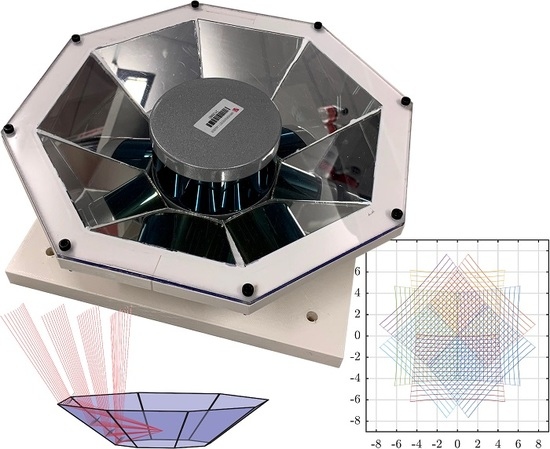
The prototype of the reflector, depicted in
Figure 1, was printed using the fused deposition modeling (FDM) method and ABS (Acrylonitrile Butadiene Styrene) filament. Reflective segments were cut from a regular 4
silver-coated mirror glass and glued inside the printed shape. Here the glue was placed in countersunk cavities to avoid altering mirror angles. Silver-coated mirror glass is a typical second surface mirror, and as explained by [
18], in second surface mirrors incident light first passes through a transparent substrate, i.e., the glass, before it is reflected by the coating. This causes chromatic dispersion from the substrate material and ghost reflections on the substrate surface. Consequently, a lower performance was expected compared to a reflector fitted with first surface mirrors. Furthermore, a plexiglass cover was designed to protect the mirrors from dirt and to emulate a glass cover. The complete prototype is 289
wide, 88
high, and weighs 2470
. Here, the LiDAR accounts for around 830
[
19].
To find the transformation from the LiDAR’s observed points to the actual reflected points in the Cartesian space it is first necessary to find the intersection points between laser and mirror. Reflection of a single beam is illustrated in
Figure 2 where all the following notations are labeled.
Calculation of intersection between line and plane is based on [
20] where the plane is defined by the normal vector,
, and a point on the plane,
. The straight line is given by the points
and
. The intersection is calculated as
where
As shown in Equation (
3), the unit reflection vector,
, from a laser coinciding with the mirror plane was calculated by subtracting the vector component that is perpendicular to the mirror plane twice.
Here,
is the full incident beam as described in Equation (
2) and
is still the mirror plane normal.
The distance between the transformed point,
, and the mirror intersection point,
, is
where
Thus, the reflected vector becomes
and the transformed point is
To get the transformed position of all measurements, the calculation explained above must be repeated for every measurement of each individual laser in the spinning LiDAR. This process is described by Algorithm
1 where azimuth angle of the LiDAR determines which mirror segment to use for reflection. The function calcTransformedPoint executes the calculations as described by Equatios (
1) to (
7). To illustrate, a set of reflections are visualized in
Figure 3. Here, reflections are shown for four lasers vertically and 11 measurements horizontally on a single reflector segment with corresponding surface normals.
| Algorithm 1 Pseudo code single frame transformation. |
- 1:
Given sensor position, - 2:
for all m in Mirrors do - 3:
[, , range] = generateMirrorPlanes(m, tilt, distance) - 4:
for all lasers do ▹ vertical - 5:
for all in measurements do ▹ horizontal - 6:
for all m in Mirrors do - 7:
if azimuth ∈ range then - 8:
calcTransformedPoint ▹ Equatios ( 1) to ( 7)
|
The prototype design, as depicted in
Figure 1, was built using eight segments and a mirror incline angle of 38°. The LiDAR used with the prototype was the Velodyne VLP-16 [
21]. This sensor has 16 lasers placed at 2° intervals to scan a vertical FOV of 30°. Depending on set rotation speed, each laser delivers between 900 and 3600 measurements horizontal points per frame. The LiDAR and reflector configuration is summarized in
Table 1. Here, the expected coverage is also shown. FOV columns V, H and MAX describe the resulting coverage limited by the LiDAR’s mirror segments’ vertical, horizontal and maximum field of view, respectively. Here,
N describes the number of overlapping segments while
is the diametric radial FOV angle. These regions are also shown in
Figure 4. Here, the dashed black circles illustrate the different FOV regions while the outline of mirror coverage areas are individually colored.
6. Discussion
The loss in power, as presented in
Section 5.1, caused by the reflector appears consistent regardless of target reflectivity. Configuration C can describe the losses of the reflector since the beams of this configuration hit the Lambertian scattering plane with the same incident angle as the baseline configuration, A. In configuration C, the total power losses caused by the reflector was 6.0–7.6% where
% was expected from mirror reflections alone. Admittedly, configuration B cannot be compared directly to A due to additional losses caused by a larger inclination angle at the scattering plane. Thus, configuration C must also be used when evaluating range reduction caused by the reflector. Here, the results suggest a loss up to
% which, in turn, translates to a range reduction of
and
for the 10% and 80% reflectance case, respectively.
Protected silver was used for the analysis as this is a good choice for manufacturing. However, if very high reflectivity is needed, there are dielectric mirror coatings that give at least % reflection. However, two factors probably inhibit the use of such a dielectric coating. First, these coatings are usually designed for a specific angle of incidence, with degraded performance for all other angles. To account for the wide field of view of the laser, the needed coating, if possible to apply at all, will become very expensive. Second, the shape of the reflector alone is challenging to apply a coating on, even for a pure metal coating. An alternative, for applications that require very high performance, could be to manufacture the 8 panes of the octagon reflector separately, coat them and put them together afterward.
The Zemax analysis was performed based on the Ouster OS1-128 using a wavelength of 850 while the prototype used the Velodyne VLP-16 which has a wavelength of 905 and a bit lower beam divergence. Furthermore, 905 yields a slightly lower reflectivity on protected silver coating. Although a smaller divergence is in principle an advantage, one cannot directly state that the simulated results of Ouster will be true for Velodyne as well. On the other hand, without accurate information about the actual sensor and light source design, simulations must be considered rough estimates. Since the model used for Ouster was just an approximation, one can assume that the interpretation of the results also applies for the Velodyne LiDAR even if the calculated losses may differ a bit.
The pattern simulations shown in
Section 5.2 illustrate that the reflector concept can be easily configured to reshape the point cloud density and field of view to accurately fit the desired application’s region of interest.
Increasing the number of segments enables very high density as the maximum number of overlapping patterns is the same as the number of segments. However, the spinning LiDAR’s 360° horizontal FOV is also divided by the number of segments which, in turn, will limit the high-resolution radial FOV of the reflector. For example, if an application requires very high point density, but not a large FOV, it is possible to make a reflector with e.g., 16 segments. Each segment would then have a horizontal FOV of which would also be the approximate radial FOV of the high-resolution region when using mirrors with 45 incline angle. However, a vast number of segments may be undesirable due to the increased number of dead zones between mirror segments, which will, in turn, reduce the number of usable measurements.
On the other hand, if the application requires a high radial FOV, lower mirror incline angles can be used to spread the patterns and, consequently, reducing the overlap. If the mirror incline angles are set lower than
, cf.
Table 6, a blind spot will appear in the middle of the pattern.
As it is possible to make configurations where the mirrors have individual incline angles, one option is to fill the central blind spot by setting one of the mirrors to 45°. This will create a gap in the radial pattern, but allow the rest of the radial FOV to cover a very large area using a single sensor, e.g., by setting seven of the mirrors from
Figure 8j to
°.
Reshaping the view is another example where individual mirror angles can be used. As illustrated in
Figure 8j, it is possible to tailor the view to the application. This example is well suited for mobile robots or autonomous vehicles. The reflector is here configured to yield high density in the lower central part of the horizon where the relative speed it typically largest. Admittedly, dead zones were not included in the simulations and it is expected that individual incline angles will affect these zones and reduce feasibility of some designs. Further analysis of this is part of future work.
The prototype results presented in
Section 5.3 show that the prototype configuration of the reflector concept typically increases point count more than four times after cropping to relevant ROI. Without cropping, the prototype can increase point count more than five times.
Although the point count is higher,
Table 7 revealed that the average reported intensity value was reduced with more than 50% when using the reflector. Hence, this vast reduction cannot correspond directly to the power loss. Based on B80 in
Table 4, the power loss is expected to be around
%. In fact, Velodyne states in [
21]:
The VLP-16 measures reflectivity of an object independent of laser power and distances involved. Reflectivity values returned are based on laser calibration against NIST-calibrated reflectivity reference targets at the factory. Diffuse reflectors report values from 0 to 100 for reflectivities from 0–100%. Retroreflectors report values from 101 to 255, where 255 represents an ideal reflection. Only the reported values from 0 to 100 were used in the described experiments. As these values are factory calibrated and calculated internally, it is expected that a recalibration is necessary to obtain correct intensity values after adding a reflector.
The average errors and sample standard deviations listed in
Table 7 do not indicate that the reflector affect precision of the measurements. However, by investigating
Figure 9e,f, it can be found that error increases outside approximately 33.5–40.5° horizontally FOV per segment. Thus, 4.5–11.5° (e.g.,
,) should possibly be discarded per intersection depending on the laser channel. The discard width is the same along the mirror intersection, but the relative angle becomes larger closer to the LiDAR. A general formulation to calculate the individual discard angles is part of future work and it is expected that this will depend on the LiDAR beam footprint on the mirror and the individual laser’s distance to the mirror at the intersection.
Given the above, it must be noted that there is a dead zone associated with each mirror intersection. When the laser footprint hits more than one mirror, the measurement must be rejected. However, the dead angle can be reduced by increasing the diameter of the reflector.
The light trail image, in
Figure 12, shows that the prototype was built to create the expected transformation. Nevertheless, there is a need for a quantifiable method to evaluate the accuracy of the mirror alignment. Even if the reflections do not reduce the precision of the measurements, a proper mirror calibration method must be part of future work to ensure measurement accuracy. Further to above considerations, an analysis of laser intensity regarding eye-safety regulations should be performed. It can be seen in
Figure 12 that the intensity is higher at the LiDAR beam crossing points. Even if the LiDAR inside the reflector is Class 1 eye-safe per IEC 60825-1:2014 [
26], it has not yet been validated that the assembly is also eye-safe.
In the introduced literature, both [
9,
10] used two fixed flat mirrors to reflect LiDAR beams in the same manner as the demonstrated design. Here, [
10] used a (single-beam) 2D LiDAR while [
9] used a (multi-beam) 3D LiDAR similar to the one demonstrated in this paper. The latter was able to reflect parts of LiDAR beam that would typically be discarded. In comparison, our proposed design can use the full 360° of the LiDAR by deploying multiple fixed mirrors. To the best of the authors’ knowledge, spinning 2D or 3D LiDAR has not been demonstrated with a mirror array of more than two mirrors before.
Although all experiments have shown the abilities of the reflector using 3D LiDAR, this is not a limitation. For example, when the reflector is mounted on a mobile robot in combination with a 2D LiDAR, i.e., spinning LiDAR with one laser, the robot is enabled to perform 3D mapping without the need for the more expensive 3D LiDAR or tilting the sensor. However, the most detailed instantaneous point cloud is obtained using the reflector in combination with a 3D LiDAR. Reflector configurations that create overlapping segment FOV enables multiple segments to measure the same object. When using the LiDAR alone, small obstacles, such as wires or ropes may not be detected, or they may cause an occlusion of the target object. On the contrary, combined with the reflector, smaller objects can be detected due to the higher point density. The occlusions by small obstacles are mitigated as the relative position of the mirrors enables the LiDAR to have multiple POVs to the object.
Another example of small obstacles that create occlusion is snow. In adverse weather conditions, as described by [
14], it is assumed likely that a LiDAR combined with the reflector can perform significantly better than the LiDAR alone. No experiments have yet been conducted to validate this, but the expectation arises from the principle of redundant measurements. Typically, if one measurement is blocked by snow, another may pass from a different POV.
On the contrary, in a solid-state LiDAR, all beams exit the sensor in close proximity, i.e., single POV. As the main driver currently is the automotive industry, one of the key value propositions is a small form factor that allows integration into the vehicle design. However, the size of solid-state LiDARs also makes them more susceptible to occlusion on, or in front of, the sensor. This may become a disadvantage for industrial applications where the form is less relevant such as crane and offshore operations.
As stated in [
17]:
What matters most is not only how quickly an object can be detected, but how quickly it can be identified and classified, a threat-level decision made, and an appropriate response calculated. A single point detection is indistinguishable from noise. Therefore, we use a common industry definition for detection which involves persistence in adjacent shots per frame and/or across frames. We require five detects on an object per frame (five points at the same range) and/or from frame-to-frame (one single related point in five consecutive frames) to declare that a detection is a valid object.Furthermore, the authors stated that: At 20 , it takes. 25 seconds to define a simple detect. Although this may be correct considering spinning LiDARs that will not revisit the same object until the next frame, it is no longer true using the reflector. By configuring the reflector with overlap, the object revisit rate can be up to the rotation frequency multiplied with the number of segments. For instance, a LiDAR spinning at 20 using a reflector with eight segments, will have an object revisit rate of 160 in the region with complete overlap. Furthermore, each individual object revisit will have a different POV, which is far more robust than the single POV of the solid-state LiDAR. Thus, a single scan is sufficient for object detection following the definition stated above. Ultimately, one could argue that multiple POVs should also be a system requirement to ensure correct object detection.
The instantaneous resolution, as described in [
17] is typically higher for a solid-state LiDAR than a spinning LiDAR within a limited FOV. However, by adding the reflector, the spinning LiDAR can achieve performance beyond a solid-state LiDAR. Similar to the object revisit rate, the instantaneous resolution can reach the multiple of segments when using the reflector. As a result, the object classification range increase accordingly. Given the above considerations, a spinning LiDAR with the proper reflector configuration may prove to be the best choice for a front facing long-range LiDAR for autonomous driving in terms of reliability. Furthermore, the enhanced robustness against adverse weather conditions makes the reflector ideal for industrial outdoor applications such as crane operations, mobile robots, offshore robotics, and personnel safety.
7. Conclusions
This paper presents the first simulations and prototype results of a novel LiDAR reflector design that has not been proven in use before.
Optical simulation results, using Zemax OpticStudio, suggest that adding a reflector with protected silver coating will reduce the range of the embedded LiDAR with only % when target incident angle remains unchanged. Although protected silver coating is a reasonable choice regarding cost and manufacturability, it is possible to use dielectric mirror coatings to increase the range.
The simulated reflector configurations reveal that the reflector can easily be configured to fit different applications. By setting the mirror incline angles to 45°, the resulting pattern will overlap with the number of mirror segments. This will create the highest possible point cloud density. However, by reducing the incline angles, and consequently reducing the pattern overlap, a larger FOV can be obtained. It is also possible to make configurations with individual mirror incline angles, and thus reshape the pattern when a radial footprint is not beneficial.
The considered prototype was constructed for a Velodyne VLP-16 spinning LiDAR with a vertical FOV of 30°. Using reflector mirror incline angles of 38° gave the assembly a radial FOV of ° with full coverage and ° with partial coverage. Comparison with LiDAR alone, using a cropped FOV of °, gave more than four times more points using the reflector on the plane-cropped ROI. Without cropping, more than five times increase is possible for this ROI.
Prototype experiments also show that the intensity value needs recalibration to yield the correct material reflectivity value. Furthermore, average measurement error and sample standard deviation indicate no precision degradation. However, measurements where the laser footprint hit mirror intersections should be discarded.
The reflected pattern was qualitatively validated using IR light trail photography, but a quantitative calibration and eye-safety analysis remains.
Compared to the current state-of-the-art spinning LiDARs, the reflector can deliver an unprecedented point cloud density. Due to the inherent reflector design, which yields multiple POVs to the same object, it is less susceptible to occlusions from for example snow than for example solid-state LiDARs limited to a single POV.
When combining a reflector with eight segments with a LiDAR spinning at 20 , the object revisit rate can increase to 160 , which traditionally has not been possible using spinning LiDARs. The high object revisit rate makes a single frame sufficient for object detection. The high instantaneous resolution consequently increases the object classification range needed for autonomous driving.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}