A Modified Kinematic Model of Shoulder Complex Based on Vicon Motion Capturing System: Generalized GH Joint with Floating Centre



Abstract
1. Introduction
2. Materials and Methods
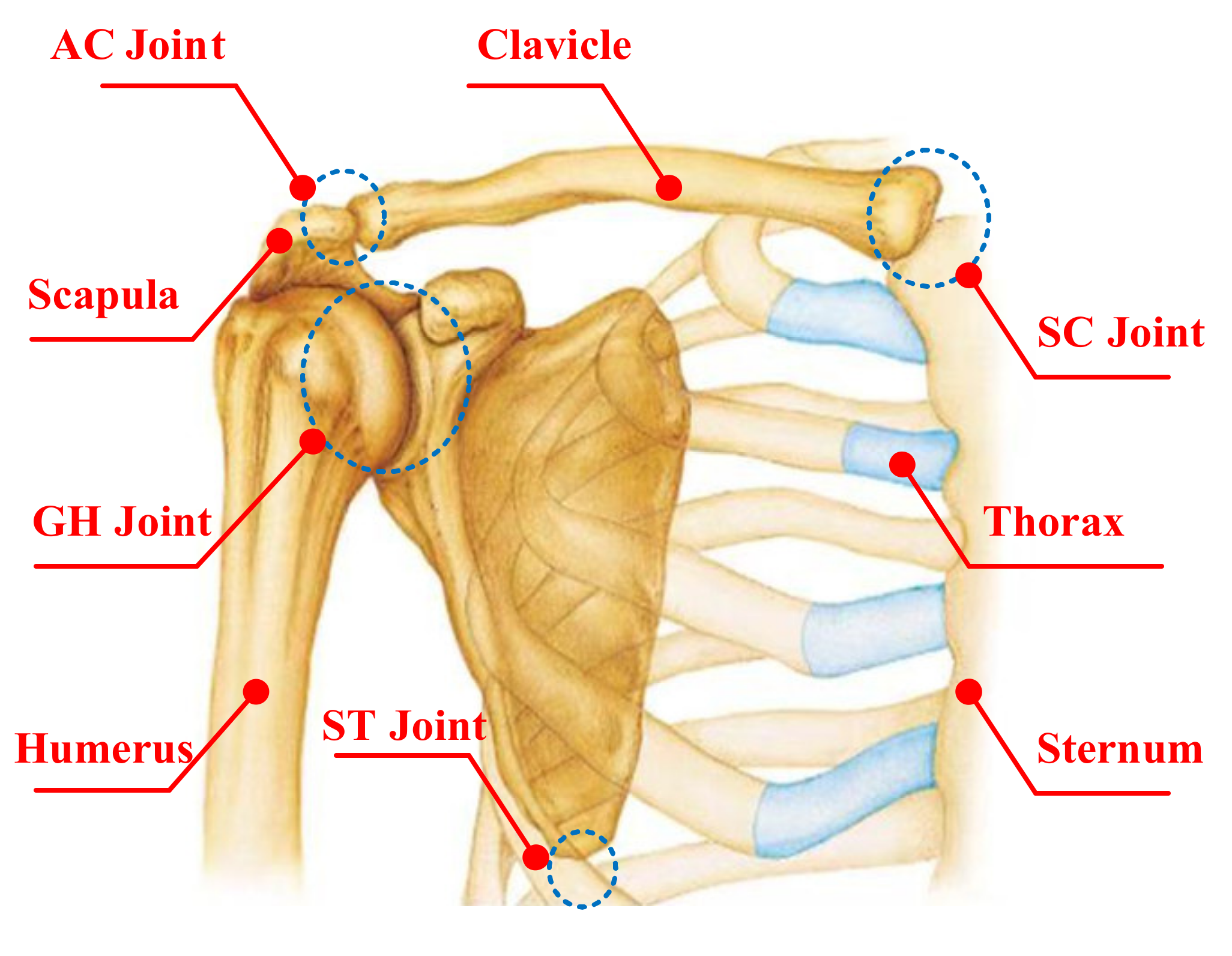
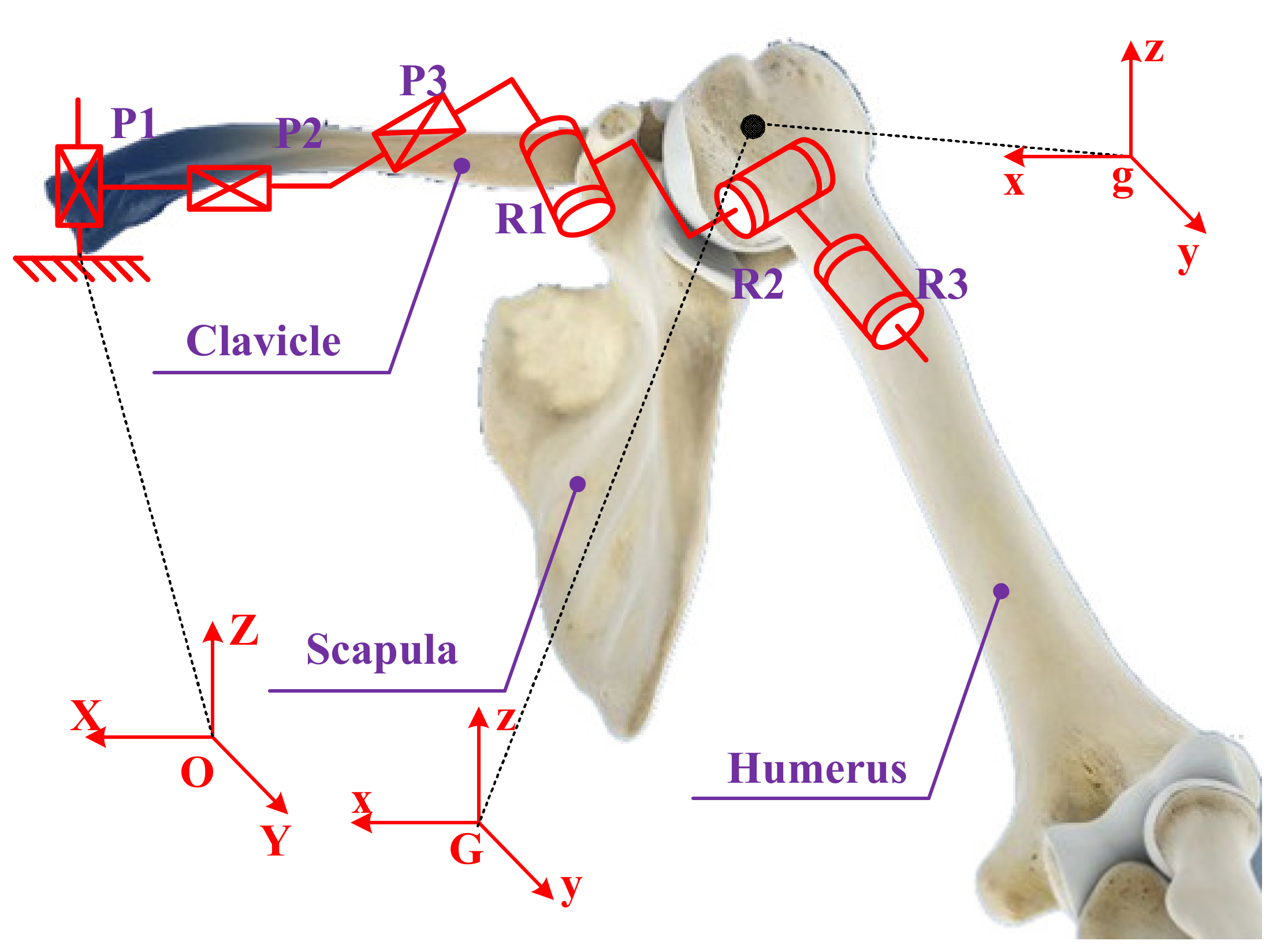
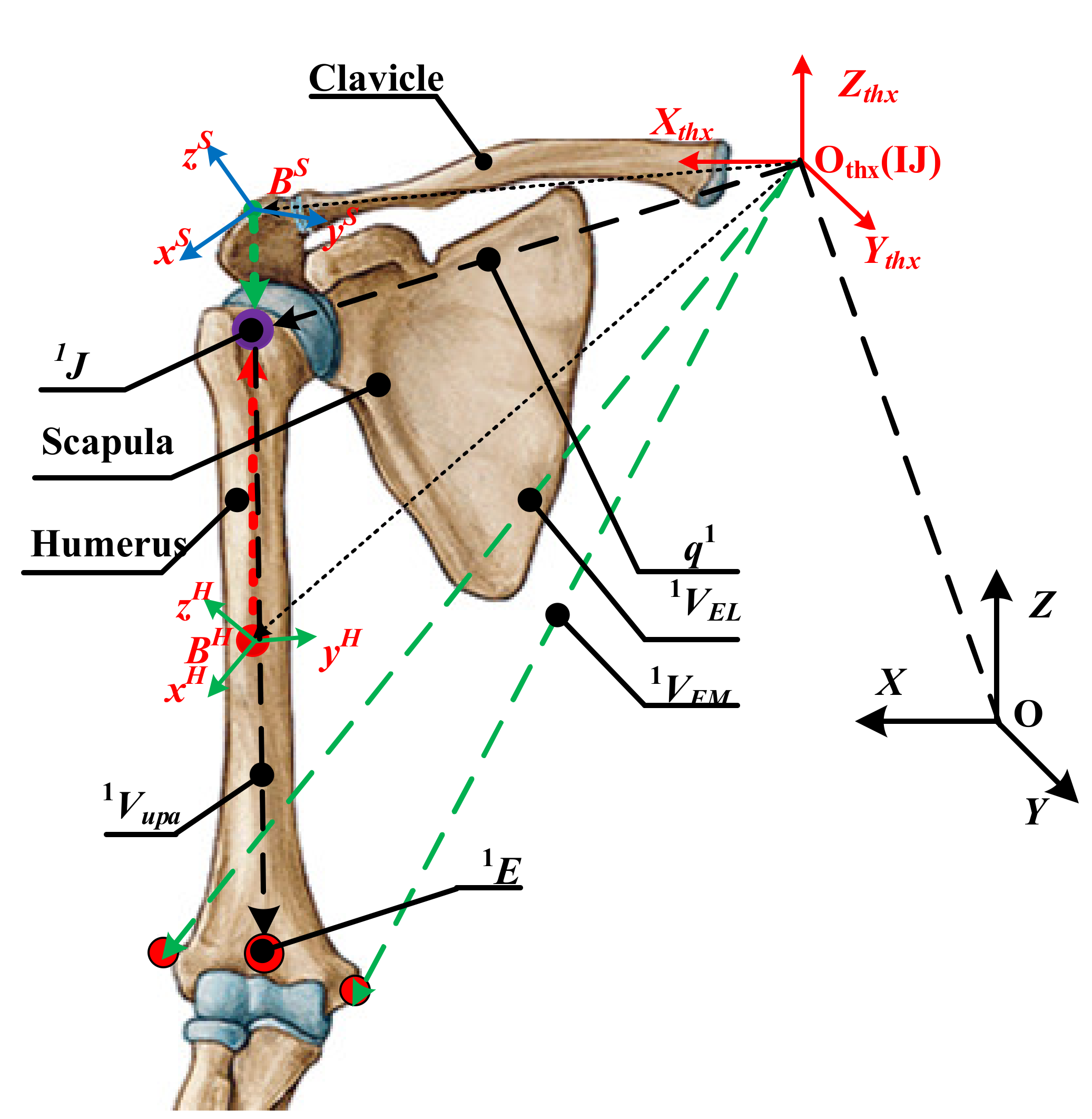
2.1. Mechanism Model of the Shoulder Complex
2.2. Design of the Algorithm
2.2.1. Acquiring the Motion Data of the Shoulder Complex
2.2.2. Obtaining the GH Joint Center Displacement Variable Quantity
2.2.3. Establishment of the Motion Coupling Relationship
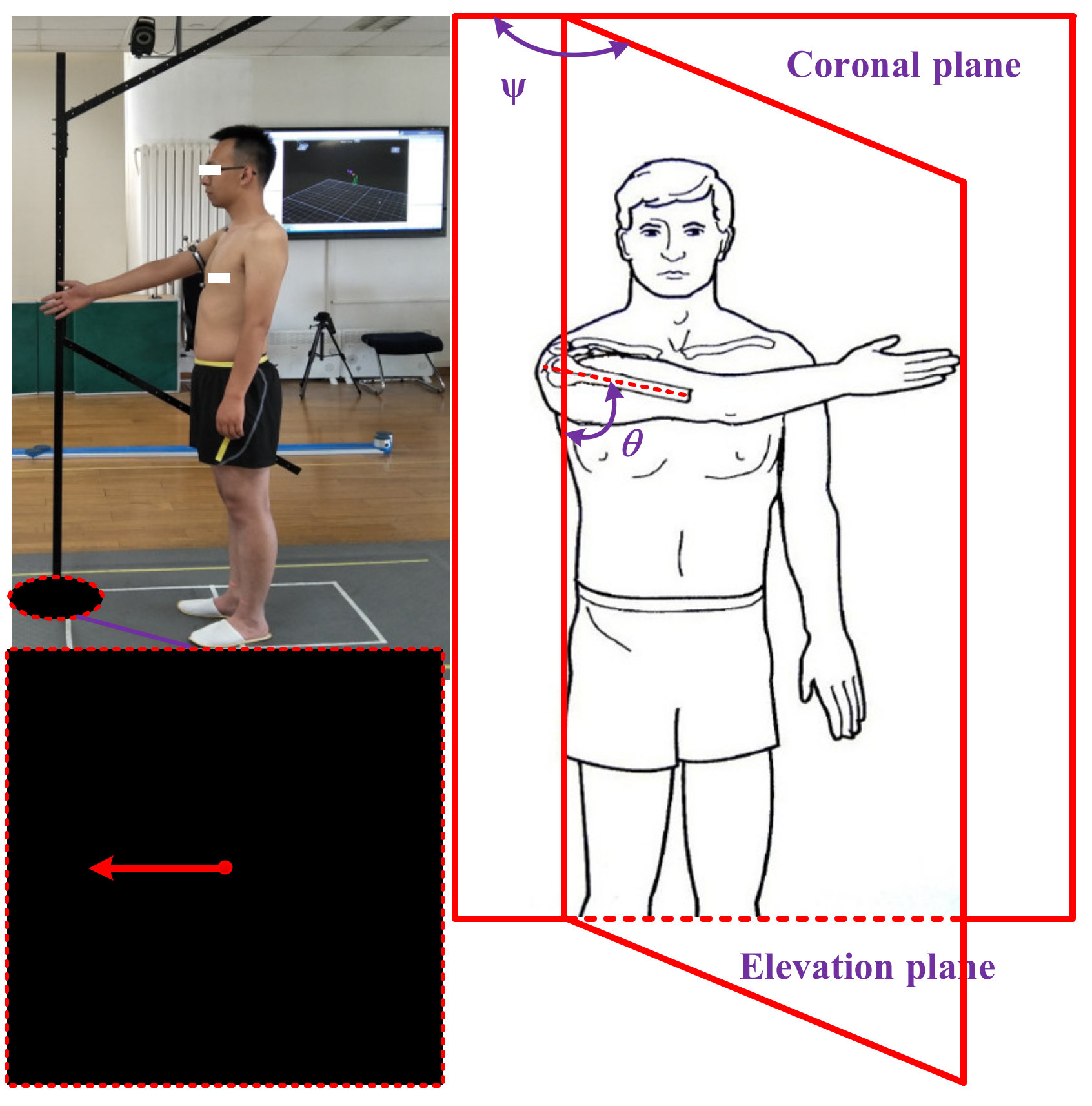
2.3. Experiment Setup
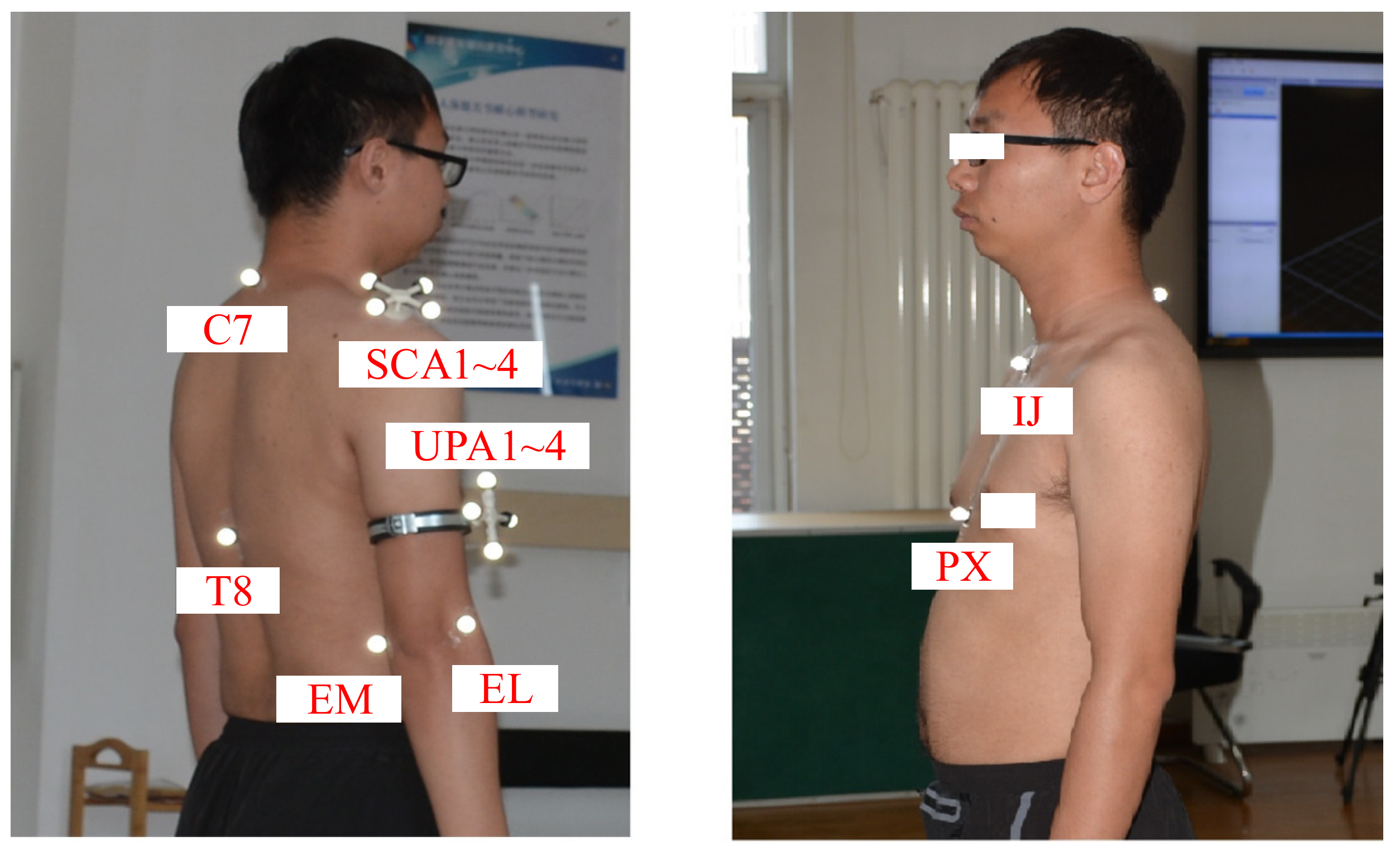
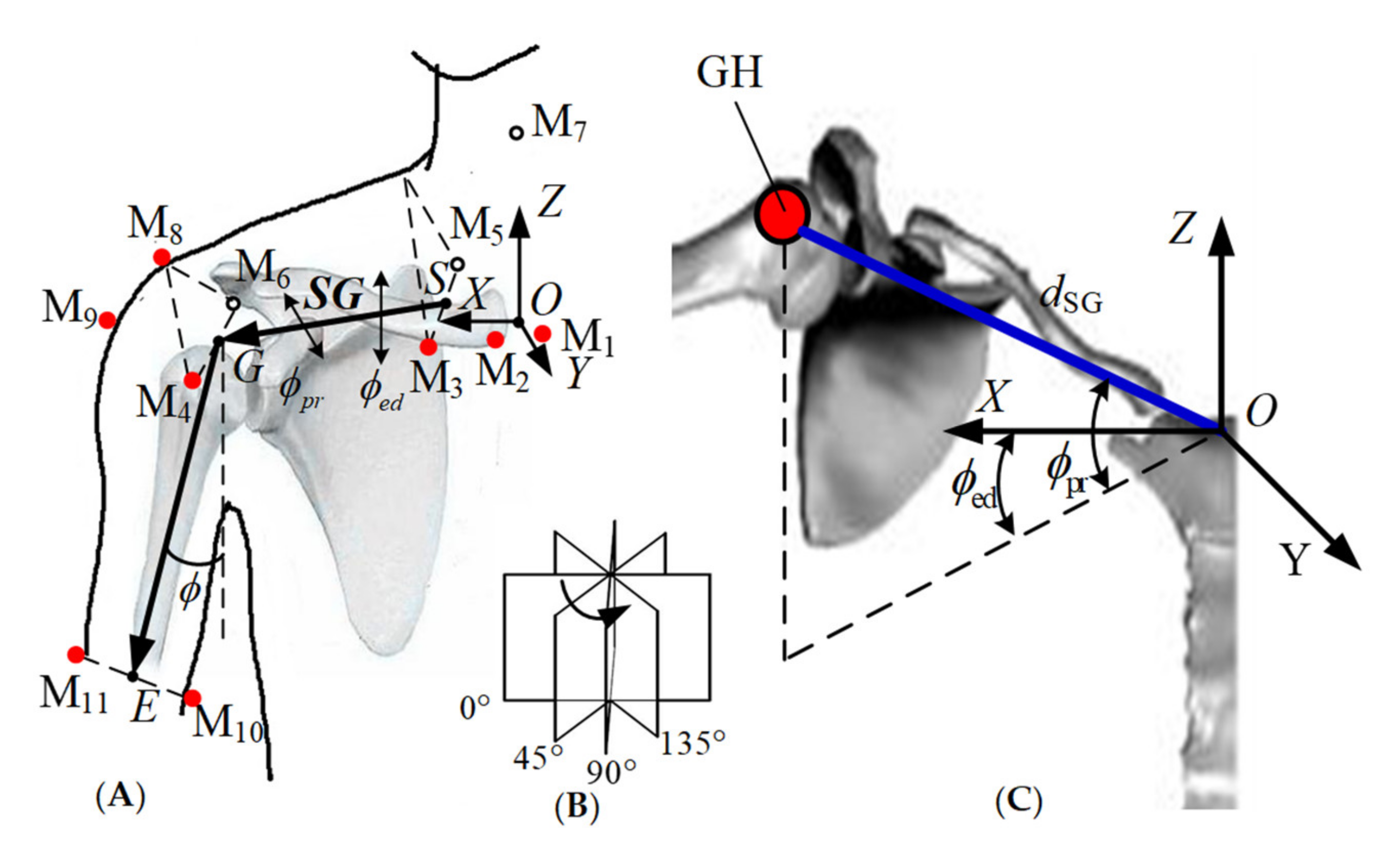
2.3.1. Marker Placements
2.3.2. Experiment Protocol
2.4. Postprocessing of Experimental Data
3. Results
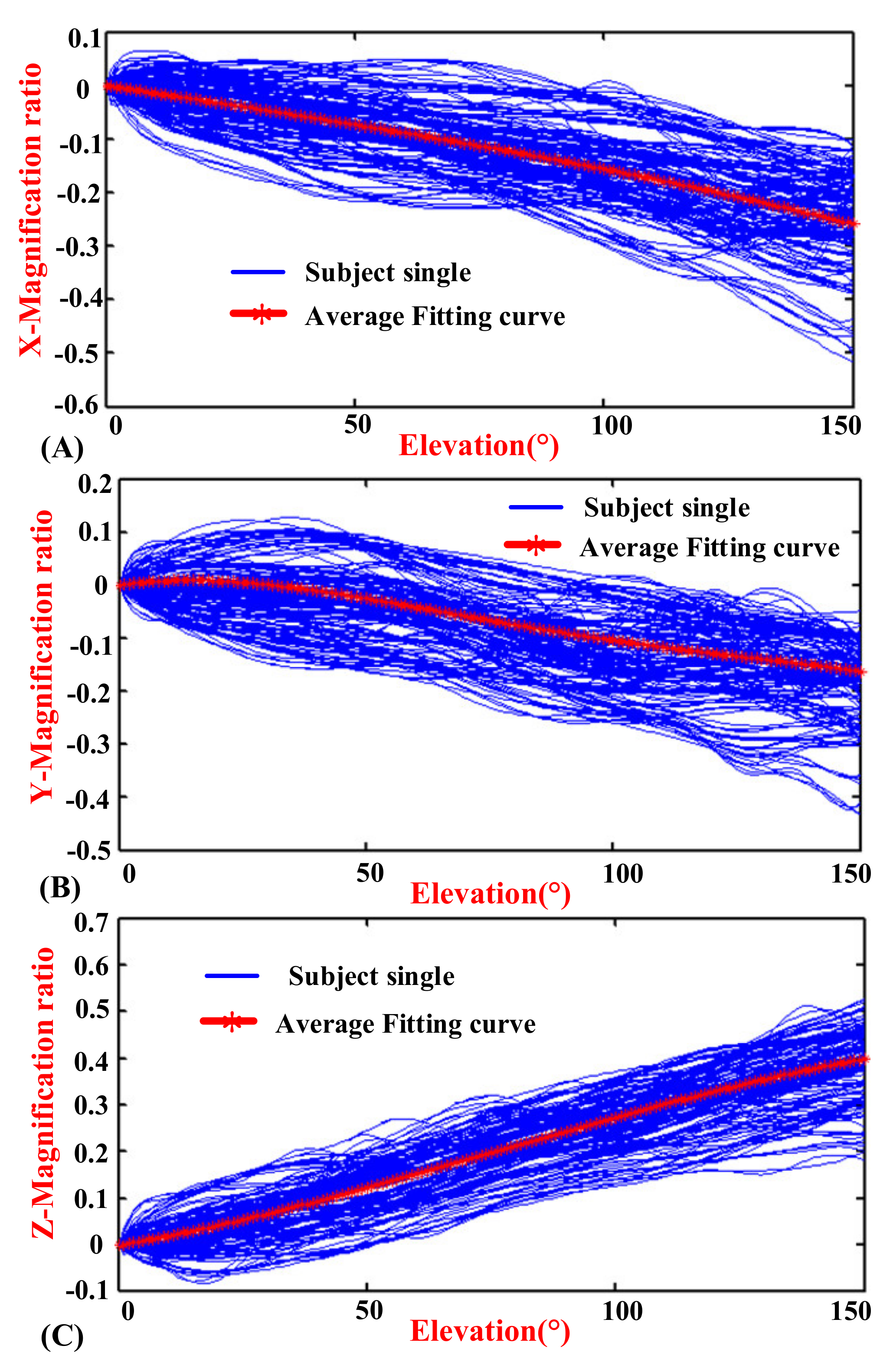
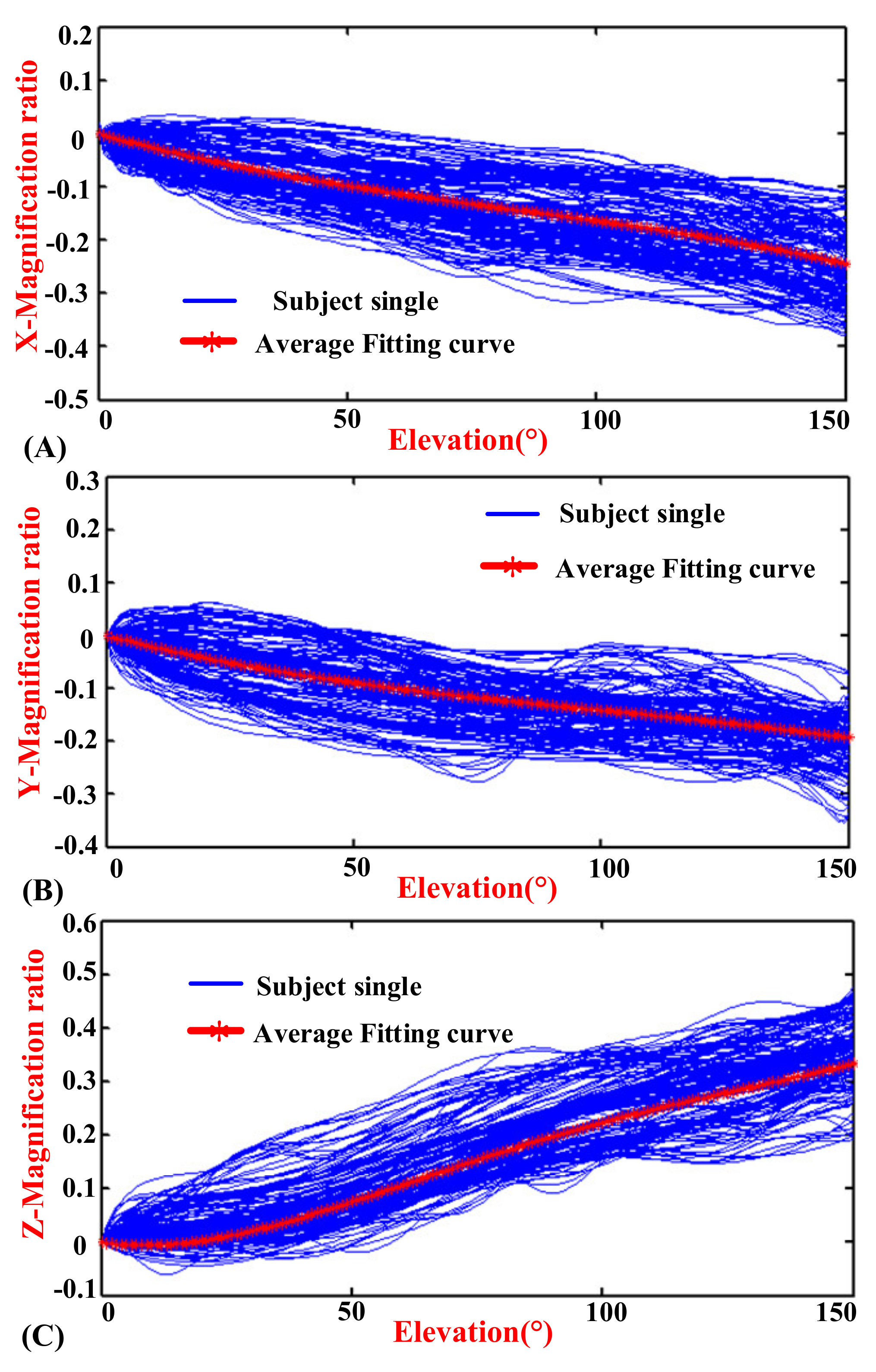
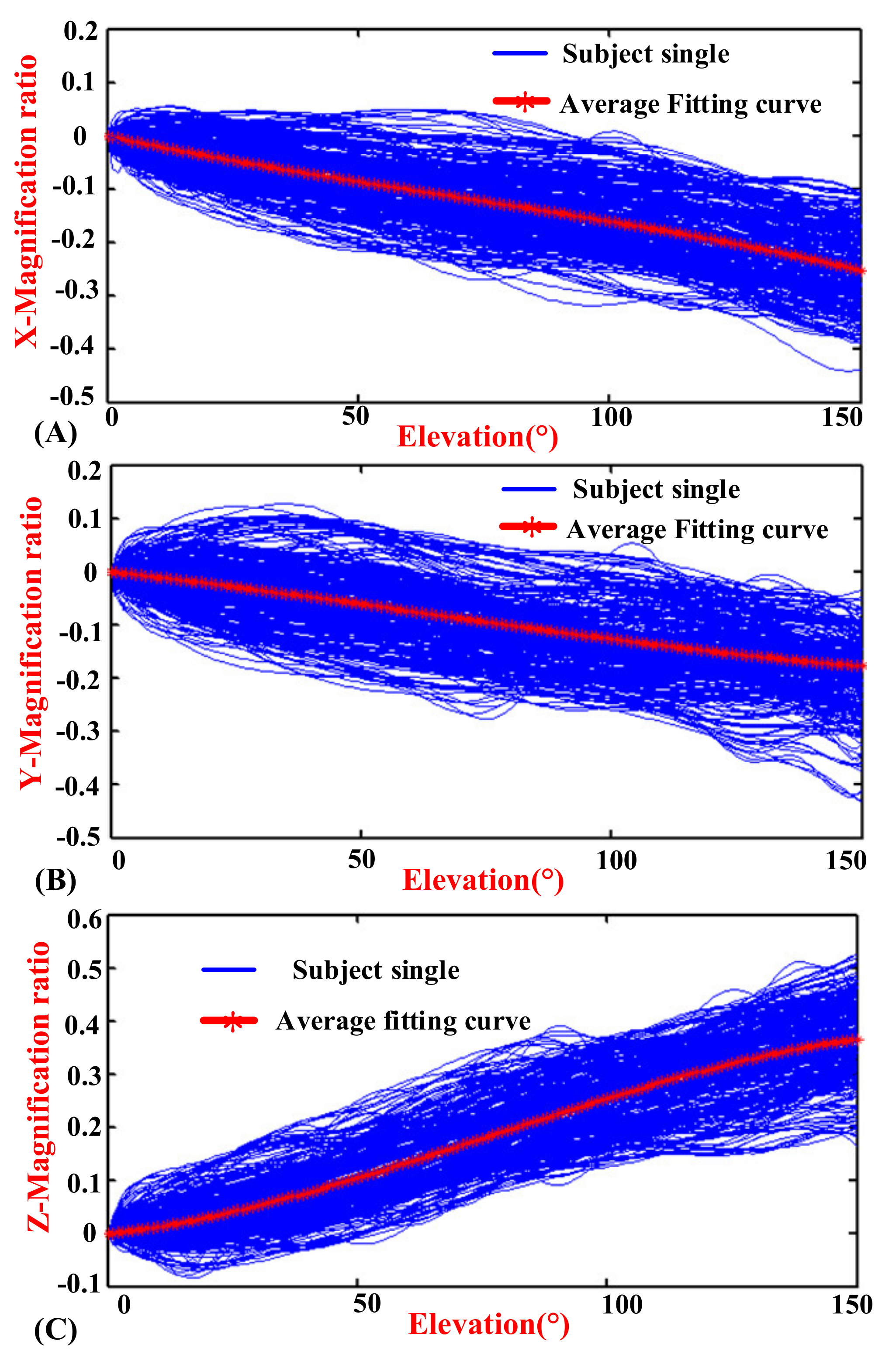
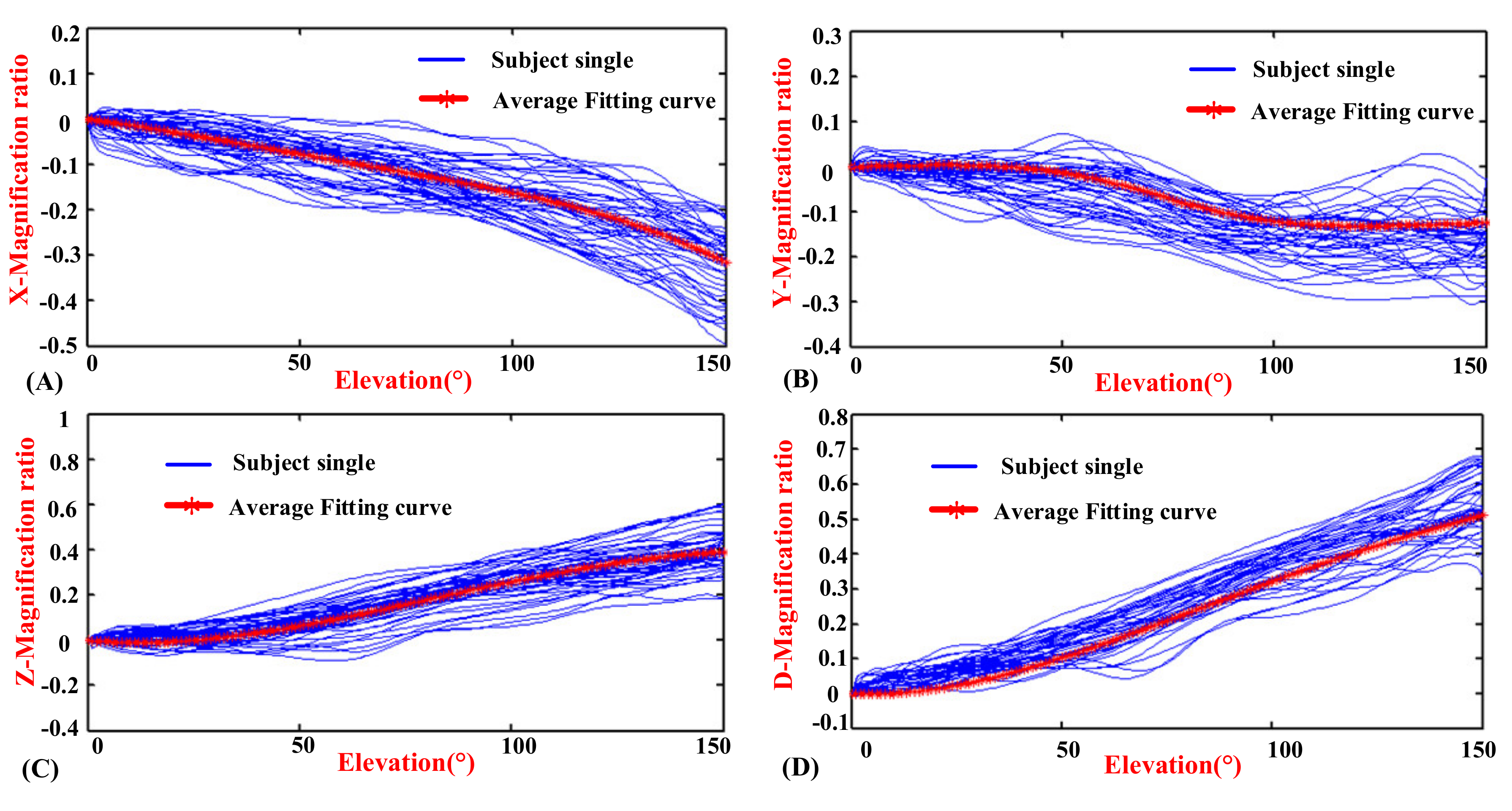
3.1. Motion Coupling Relationship in Different Phases
3.2. Kinematic Model of the Shoulder Complex
4. Discussion
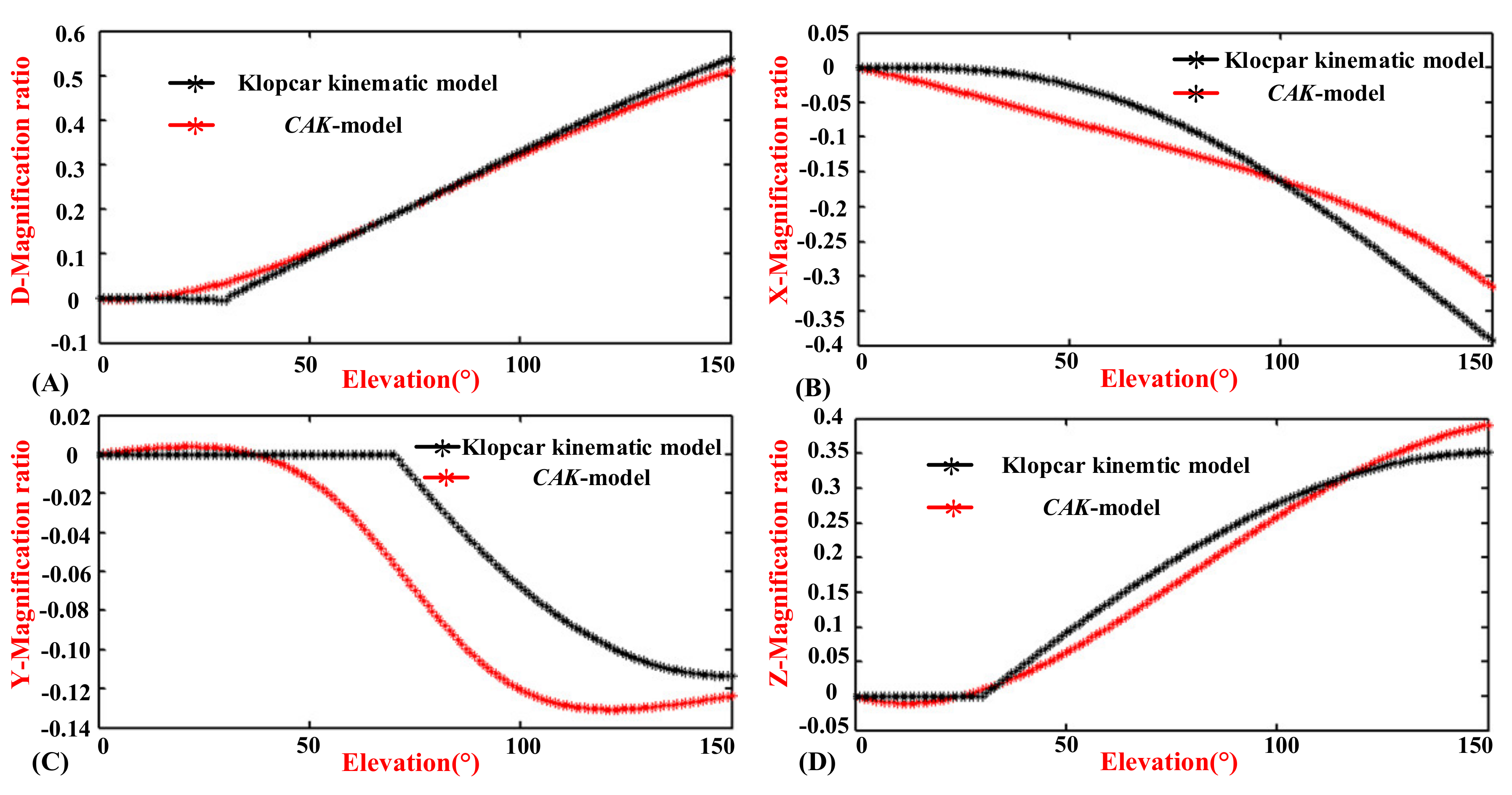
4.1. Comparison of Collected Data with the Klopčar Kinematic Model
4.1.1. Klopčar Kinematic Model
4.1.2. The CAK-Model
4.1.3. Comparison of the CAK-Model and the Klopčar Kinematic Model
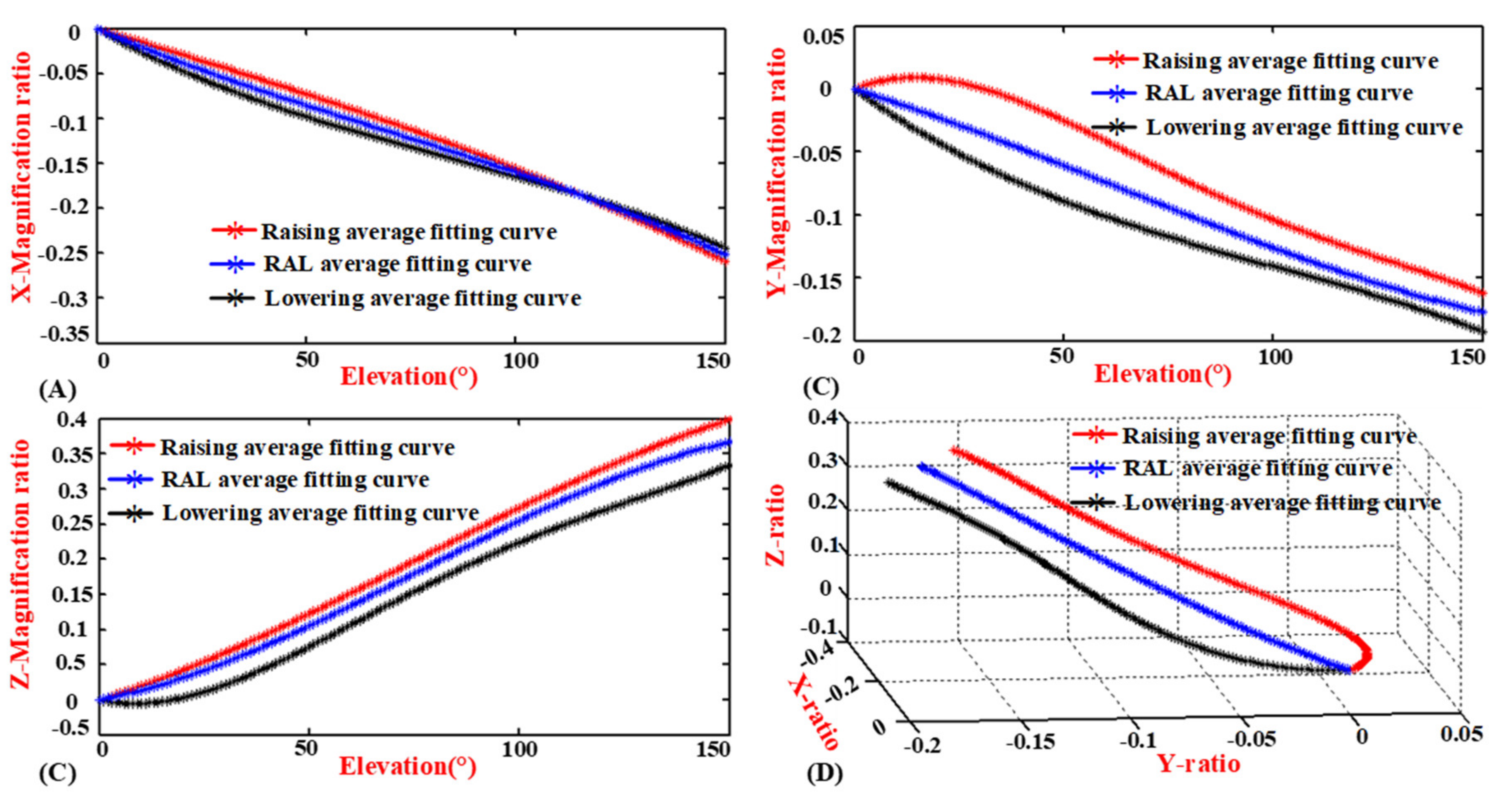
4.2. Comparison of the Motion Coupling Characteristics in Different Phases
4.3. Discussion of the Whole Paper
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Jackson, M.; Michaud, B.; Tétreault, P.; Begon, M. Improvements in measuring shoulder joint kinematics. J. Biomech. 2012, 45, 2180–2183. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Feng, X.; Rajulu, S.; Kim, J.H. Review of biomechanical models for human shoulder complex. Int. J. Hum. Factors Model. Simul. 2010, 1, 271. [Google Scholar] [CrossRef]
- Mazzoleni, S.; Duret, C.; Gaëlle Grosmaire, A.; Battini, E. Combining upper limb robotic rehabilitation with other therapeutic approaches after stroke: Current status, rationale, and challenges. Biomed. Res. Int. 2017, 2017, 1–11. [Google Scholar] [CrossRef]
- Pan, L.; Song, A.; Duan, S.; Yu, Z. Patient-Centered Robot-Aided Passive Neurorehabilitation Exercise Based on Safety-Motion Decision-Making Mechanism. BioMed Res. Int. 2017, 2017, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Tondu, B. Estimating shoulder-complex mobility. Appl. Bionics Biomech. 2007, 4, 19–29. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Z.; Tao, C.; Ji, R. A number synthesis method of the self-adapting upper-limb rehabilitation exoskeletons. Int. J. Adv. Robot. Syst. 2017, 14, 1–14. [Google Scholar] [CrossRef]
- Klopčar, N.; Lenarčič, J. Bilateral and unilateral shoulder girdle kinematics during humeral elevation. Clin. Biomech. 2006, 21, S20–S26. [Google Scholar] [CrossRef]
- Hingtgen, B.; McGuire, J.R.; Wang, M.; Harris, G.F. An upper extremity kinematic model for evaluation of hemiparetic stroke. J. Biomech. 2006, 39, 681–688. [Google Scholar] [CrossRef]
- McClure, P.W.; Michener, L.A.; Sennett, B.J.; Karduna, A.R. Direct 3-dimensional measurement of scapular kinematics during dynamic movements in vivo. J. Shoulder Elb. Surg. 2001, 10, 269–277. [Google Scholar] [CrossRef]
- Dvir, Z.; Berme, N. The shoulder complex in elevation of the arm: A mechanism approach. J. Biomech. 1978, 11, 219–225. [Google Scholar] [CrossRef]
- Bagg, S.D.; Forrest, W.J. A biomechanical analysis of scapular rotation during arm abduction in the scapular plane. Am. J. Phys. Med. Rehabilitation 1988, 67, 238–245. [Google Scholar]
- Lenarcic, J.; Umek, A. Simple model of human arm reachable workspace. IEEE Trans. Syst. Man, Cybern. 1994, 24, 1239–1246. [Google Scholar] [CrossRef]
- Yang, J.; Abdel-Malek, K.; Nebel, K. Reach envelope of a 9-degree-of-freedom model. Int. J. Robot. Autom. 2005, 20, 240–259. [Google Scholar]
- Lenarčič, J.; Stanišić, M. A humanoid shoulder complex and the humeral pointing kinematics. IEEE Trans. Robot. Autom. 2003, 19, 499–506. [Google Scholar] [CrossRef]
- Yang, J.; Feng, X.; Xiang, Y.; Kim, J.H.; Rajulu, S. Determining the three-dimensional relation between the skeletal elements of the human shoulder complex. J. Biomech. 2009, 42, 1762–1767. [Google Scholar] [CrossRef]
- Tondu, B. Modelling of the shoulder complex and application to the design of upper extremities for humanoid robots. In Proceedings of the 5th IEEE-RAS International Conference on Humanoid Robots, Tsukuba, Japan, 5 December 2005; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2006; pp. 313–320. [Google Scholar]
- Maurel, W.; Thalmann, D. A Case Study on Human Upper Limb Modelling for Dynamic Simulation. Comput. Methods Biomech. Biomed. Eng. 1999, 2, 65–82. [Google Scholar] [CrossRef]
- Berthonnaud, E.; Herzberg, G.; Zhao, K.D.; An, K.N.; Dimnet, J. Three-dimensional in vivo displacements of the shoulder complex from biplanar radiography. Surg. Radiol. Anat. 2005, 27, 214–222. [Google Scholar] [CrossRef] [PubMed]
- Lenarčič, J.; Stanišić, M.M.; Parenti-Castelli, V. Kinematic design of a humanoid robotic shoulder complex. In Proceedings of the 2000 ICRA. Millennium Conference IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2000; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2002; Volume 1, pp. 27–32. [Google Scholar]
- Kirsch, R.F.; Acosta, A.M.; Van Der Helm, F.C.; Rotteveel, R.J.; Cash, L.A. Model-based development of neuroprostheses for restoring proximal arm function. J. Rehabilitation Res. Dev. 2002, 38, 619–626. [Google Scholar]
- Van Der Helm, F. A finite element musculoskeletal model of the shoulder mechanism. J. Biomech. 1994, 27, 551–569. [Google Scholar] [CrossRef]
- Newkirk, J.T.; Tomšič, M.; Crowell, C.R.; Villano, M.; Stanisic, M.M. Measurement and Quantification of Gross Human Shoulder Motion. Appl. Bionics Biomech. 2013, 10, 159–173. [Google Scholar] [CrossRef]
- Braman, J.P.; Engel, S.C.; Laprade, R.F.; Ludewig, P.M. In vivo assessment of scapulohumeral rhythm during unconstrained overhead reaching in asymptomatic subjects. J. Shoulder Elb. Surg. 2009, 18, 960–967. [Google Scholar] [CrossRef] [PubMed]
- Högfors, C.; Peterson, B.; Sigholm, G.; Herberts, P. Biomechanical model of the human shoulder joint-II. The shoulder rhythm. J. Biomech. 1991, 24, 699–709. [Google Scholar] [CrossRef]
- Sholukha, V.; Jan, S.V.S. Combined Motions of the Shoulder Joint Complex for Model-Based Simulation: Modeling of the Shoulder Rhythm (ShRm). In 3D Multiscale Physiological Human; Springer Science and Business Media LLC: London, UK, 2013; pp. 205–232. [Google Scholar]
- Lenarčič, J.; Klopcar, N. Positional kinematics of humanoid arms. Robot. 2005, 24, 105–112. [Google Scholar] [CrossRef]
- Li, J.; Zhang, C.; Cao, Q. Detection System Design of the Glenohumeral Joint Motion Information. In Proceedings of the 5th International Conference on Vehicle, Mechanical and Electrical Engineering, Dalian, China, 28–29 September 2019; SciTePress: Setúbal, Portugal, 2019; pp. 222–226. [Google Scholar]
- Tomoaia, G.; Benea, H.; Miclea, L. Computed study of shoulder dynamics Kinematics and dynamic analysis of shoulder movement. In Proceedings of the 2008 IEEE International Conference on Automation, Quality and Testing, Robotics, Cluj-Napoca, Romania, 22–25 May 2008; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2008; Volume 3, pp. 90–93. [Google Scholar]
- Kiguchi, K.; Kado, K.; Hayashi, Y. Design of a 7DOF upper-limb power-assist exoskeleton robot with moving shoulder joint mechanism. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Phuket, Thailand, 7–11 December 2011; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2011; pp. 2937–2942. [Google Scholar]
- Klopcar, N.; Lennarčič, J. Kinematic Model for Determination of Human Arm Reachable Workspace. Meccanica 2005, 40, 203–219. [Google Scholar] [CrossRef]
- Heidari, O.; Pourgharibshahi, V.; Urfer, A.; Perez-Gracia, A. A new algorithm to estimate glenohumeral joint location based on scapula Rrhythm. In Proceedings of the 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC 2018), Honolulu, HI, USA, 18–21 July 2018; pp. 1476–1480. [Google Scholar]
- Laitenberger, M.; Raison, M.; Périé, D.; Begon, M. Refinement of the upper limb joint kinematics and dynamics using a subject-specific closed-loop forearm model. Multibody Syst. Dyn. 2014, 33, 413–438. [Google Scholar] [CrossRef]
- Schnorenberg, A.J.; Slavens, B.A.; Wang, M.; Vogel, L.C.; Smith, P.A.; Harris, G.F. Biomechanical model for evaluation of pediatric upper extremity joint dynamics during wheelchair mobility. J. Biomech. 2013, 47, 269–276. [Google Scholar] [CrossRef] [PubMed]
- Högfors, C.; Karlsson, D.; Peterson, B. Structure and internal consistency of a shoulder model. J. Biomech. 1995, 28, 767–777. [Google Scholar] [CrossRef]
- Zeiaee, A.; Soltani-Zarrin, R.; Langari, R.; Tafreshi, R. Design and kinematic analysis of a novel upper limb exoskeleton for rehabilitation of stroke patients. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2017; pp. 759–764. [Google Scholar]
- Wu, G.; Van Der Helm, F.C.; Veeger, D.H.E.J.; Makhsous, M.; Van Roy, P.; Anglin, C.; Nagels, J.; Karduna, A.R.; McQuade, K.; Wang, X.; et al. ISB recommendation on definitions of joint coordinate systems of various joints for the reporting of human joint motion—Part II: Shoulder, elbow, wrist and hand. J. Biomech. 2005, 38, 981–992. [Google Scholar] [CrossRef]
- Lovern, B.; Stroud, L.A.; Evans, O.R.; Evans, S.; Holt, C. Dynamic tracking of the scapula using skin-mounted markers. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2009, 223, 823–831. [Google Scholar] [CrossRef]
- McQuade, K.J.; Smidt, G.L. Dynamic Scapulohumeral Rhythm: The Effects of External Resistance During Elevation of the Arm in the Scapular Plane. J. Orthop. Sports Phys. Ther. 1998, 27, 125–133. [Google Scholar] [CrossRef]
- Park, J.-H.; Lee, K.-S.; Lee, S.U.; Park, H.-S. A passive shoulder joint tracking device for effective upper limb rehabilitation. Int. J. Precis. Eng. Manuf. 2016, 17, 1533–1540. [Google Scholar] [CrossRef]
- Yan, H.; Yang, C.; Zhang, Y.; Wang, Y. Design and Validation of a Compatible 3-Degrees of Freedom Shoulder Exoskeleton With an Adaptive Center of Rotation. J. Mech. Des. 2014, 136, 071006. [Google Scholar] [CrossRef]
- Lobo-Prat, J.; Font-Llagunes, J.M.; Gómez-Pérez, C.; Medina-Casanovas, J.; Angulo-Barroso, R.M. New biomechanical model for clinical evaluation of the upper extremity motion in subjects with neurological disorders: An application case. Comput. Methods Biomech. Biomed. Eng. 2012, 17, 1144–1156. [Google Scholar] [CrossRef]
- Timmons, M.K.; Thigpen, C.A.; Seitz, A.L.; Karduna, A.R.; Arnold, B.L.; Michener, L.A. Scapular kinematics and subacromial-impingement syndrome: A meta-analysis. J. Sport Rehabilitation 2012, 21, 354–370. [Google Scholar] [CrossRef]
- Hawkins, D.M. The problem of overfitting. J. Chem. Inf. Comput. Sci. 2004, 44, 1–12. [Google Scholar] [CrossRef]
- Van Der Aalst, W.M.P.; Rubin, V.; Verbeek, E.; Van Dongen, B.F.; Kindler, E.; Günther, C.W.; Van Dongen, B. Process mining: A two-step approach to balance between underfitting and overfitting. Softw. Syst. Model. 2008, 9, 87–111. [Google Scholar] [CrossRef]
- Zhang, L.; Li, J.; Su, P.; Song, Y.; Dong, M.; Cao, Q. Improvement of human–machine compatibility of upper-limb rehabilitation exoskeleton using passive joints. Robot. Auton. Syst. 2019, 112, 22–31. [Google Scholar] [CrossRef]
- Hamming, D.; Braman, J.P.; Phadke, V.; Laprade, R.F.; Ludewig, P.M. The accuracy of measuring glenohumeral motion with a surface humeral cuff. J. Biomech. 2012, 45, 1161–1168. [Google Scholar] [CrossRef] [PubMed]
- Maso, F.D.; Raison, M.; Lundberg, A.; Arndt, T.; Begon, M. Coupling between 3D displacements and rotations at the glenohumeral joint during dynamic tasks in healthy participants. Clin. Biomech. 2014, 29, 1048–1055. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SSE | R-Square | Adjusted R-Square | RMSE | |
|---|---|---|---|---|
| X-raising | 0.001932 | 0.9977 | 0.9976 | 0.003625 |
| Y-raising | 0.003847 | 0.9922 | 0.992 | 0.005133 |
| Z-raising | 0.0008856 | 0.9996 | 0.9996 | 0.002455 |
| X-lowering | 0.0008811 | 0.9986 | 0.9986 | 0.002448 |
| Y-lowering | 0.004578 | 0.9888 | 0.9886 | 0.005581 |
| Z-lowering | 0.003733 | 0.998 | 0.998 | 0.005057 |
| X-RAL | 0.0003742 | 0.9995 | 0.9995 | 0.001595 |
| Y-RAL | 0.003822 | 0.9914 | 0.9912 | 0.005099 |
| Z-RAL | 0.002489 | 0.9988 | 0.9988 | 0.004114 |
| x-CAK | 0.0001855 | 0.9998 | 0.9998 | 0.001127 |
| y-CAK | 0.006171 | 0.9871 | 0.9868 | 0.006502 |
| z-CAK | 0.005195 | 0.998 | 0.998 | 0.006502 |
| d-CAK | 0.008561 | 0.998 | 0.9979 | 0.007557 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Dong, M.; Li, J.; Cao, Q. A Modified Kinematic Model of Shoulder Complex Based on Vicon Motion Capturing System: Generalized GH Joint with Floating Centre. Sensors 2020, 20, 3713. https://doi.org/10.3390/s20133713
Zhang C, Dong M, Li J, Cao Q. A Modified Kinematic Model of Shoulder Complex Based on Vicon Motion Capturing System: Generalized GH Joint with Floating Centre. Sensors. 2020; 20(13):3713. https://doi.org/10.3390/s20133713
Chicago/Turabian StyleZhang, Chunzhao, Mingjie Dong, Jianfeng Li, and Qiang Cao. 2020. "A Modified Kinematic Model of Shoulder Complex Based on Vicon Motion Capturing System: Generalized GH Joint with Floating Centre" Sensors 20, no. 13: 3713. https://doi.org/10.3390/s20133713
APA StyleZhang, C., Dong, M., Li, J., & Cao, Q. (2020). A Modified Kinematic Model of Shoulder Complex Based on Vicon Motion Capturing System: Generalized GH Joint with Floating Centre. Sensors, 20(13), 3713. https://doi.org/10.3390/s20133713