In this section, we provide a detailed description of our algorithm which is summarized in Algorithm 1.
First, we compute the curvilinear abscissa for each pose of the trajectory based on Equation (
13) (line 1). The surface prior
is then estimated by fitting an elliptic cylinder to the vertical sonar points (line 2). The Gaussian process (GP) modeling the environment surface is trained using the vertical sonar measurements and their corresponding curvilinear abscissa (line 3). Once done, for each horizontal sonar data, we estimate the most likely elevation angles
(line 5) and compute their corresponding uncertainties (line 7). In the following, we detail the process for each step.
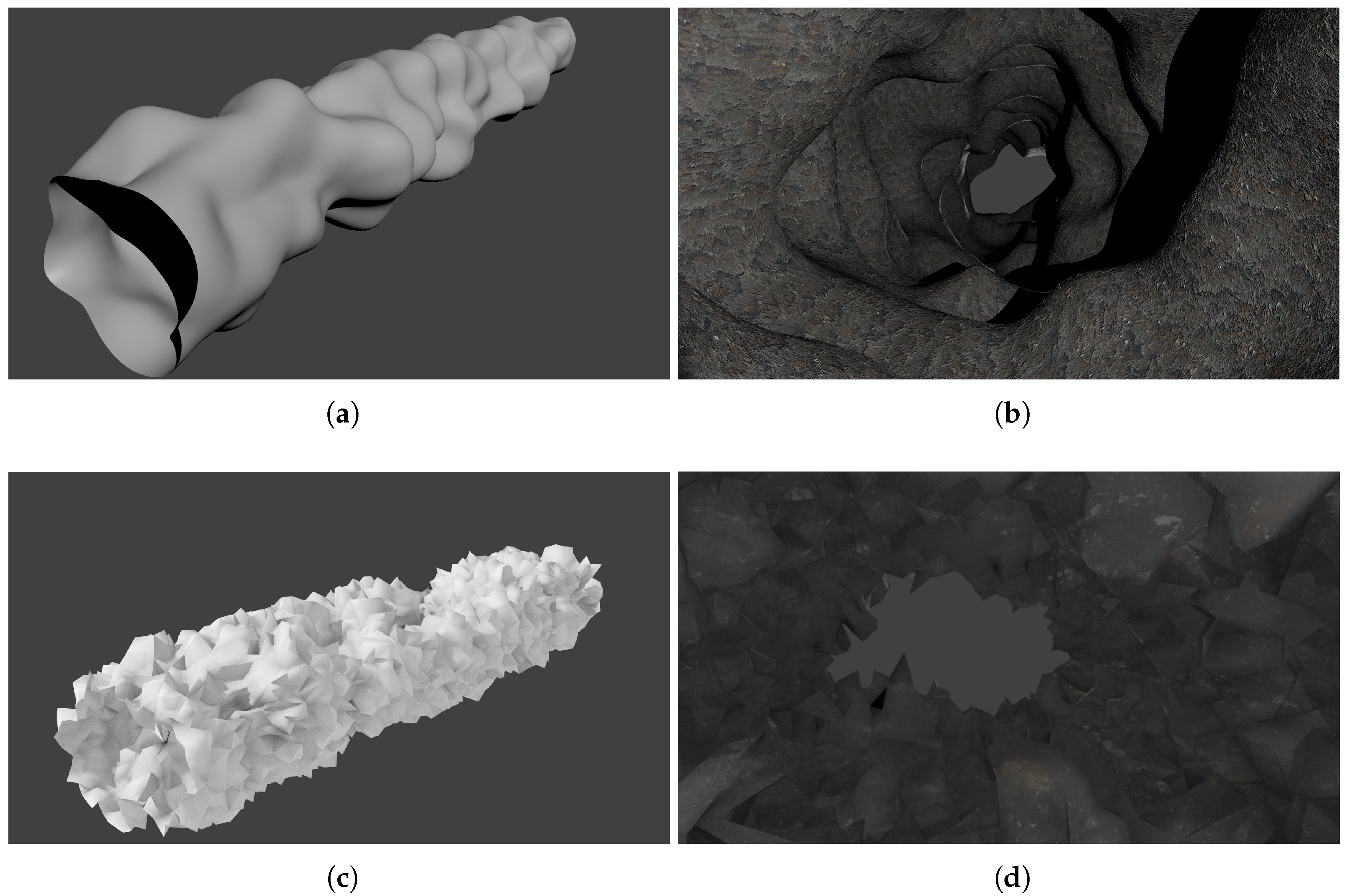
4.2.1. Environment Prior
In this section, we explain how our environment prior is defined. Based on typical karstic environment, the natural choice is to use an elliptic cylinder as a prior shape. For a given pose on the trajectory (equivalently its curvilinear abscissa) and a given sonar rotation angle , returns the distance to the prior shape.
In order to fit this primitive on the vertical sonar measurements, we follow an approach similar to [
31]. First, as for any non-linear optimization approach, we need a good initial shape. It is obtained by computing robust principal component analysis (RPCA) [
32] on the vertical sonar point cloud. It provides three principals vectors which, in the case of a perfect elliptic cylinder, should correspond to the cylinder axis, the major and the minor elliptic axis. If the length of the estimated cylinder is higher than its width, then the eigenvector with the highest eigenvalue is the cylinder axis. However, we cannot make this assumption in our case. To find the cylinder axis among those principal vectors, we used the fact that every tangent on a cylinder surface is orthogonal to its axis. This means that by approximating tangent vectors by the vector formed by two successive points, their projections on the PCA bases should be minimal along the cylinder axis.
Then, the elliptic section is estimated by fitting the projections of all the points in the plane spanned by the two other principals axis [
33]. The PCA base is then rotated around the cylinder axis to be aligned with the ellipse axis.
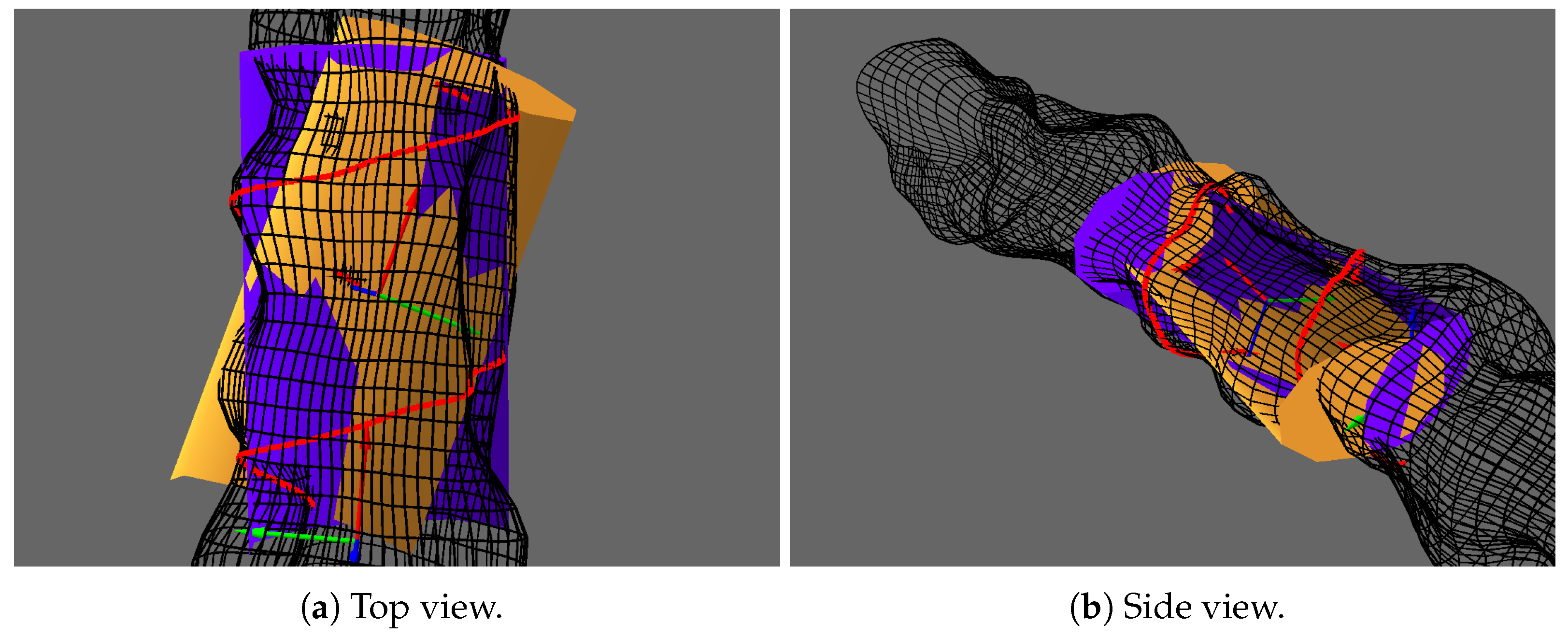
As can be seen with the orange elliptic cylinder in
Figure 5, the dissymetric distribution of the vertical sonar points has a huge influence on the RPCA result. To further improve our estimation, we use the Levendberg–Marquardt (LM) algorithm to obtain the shape which minimizes orthogonal distances to the elliptic cylinder. The estimation vector
representing our elliptic cylinder is composed of a 6D pose in
and the scales along the minor and major ellipse axis. Here, we use on-manifold optimization on
, as described in [
22]. The final prior can be seen as the purple cylinder in
Figure 5.
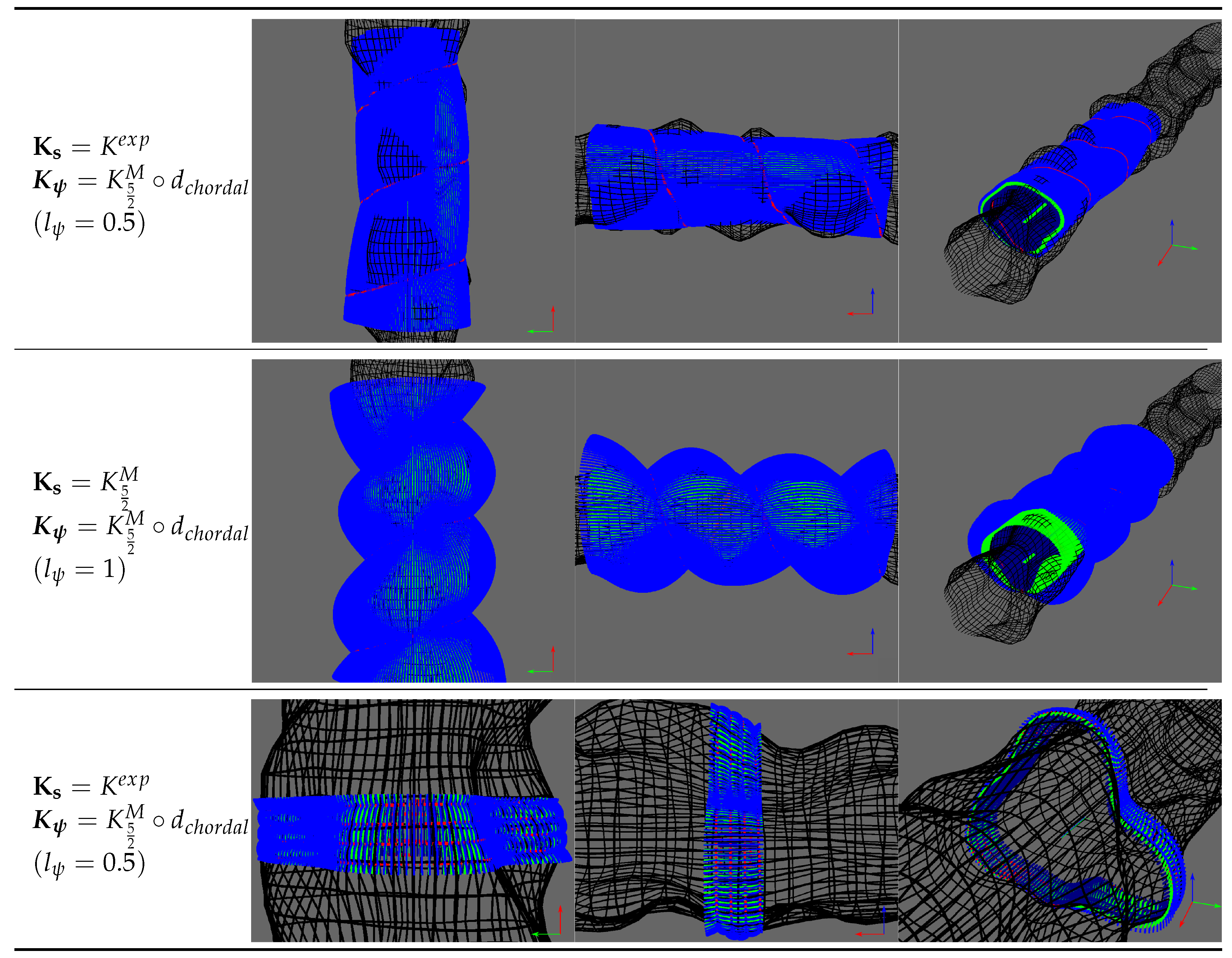
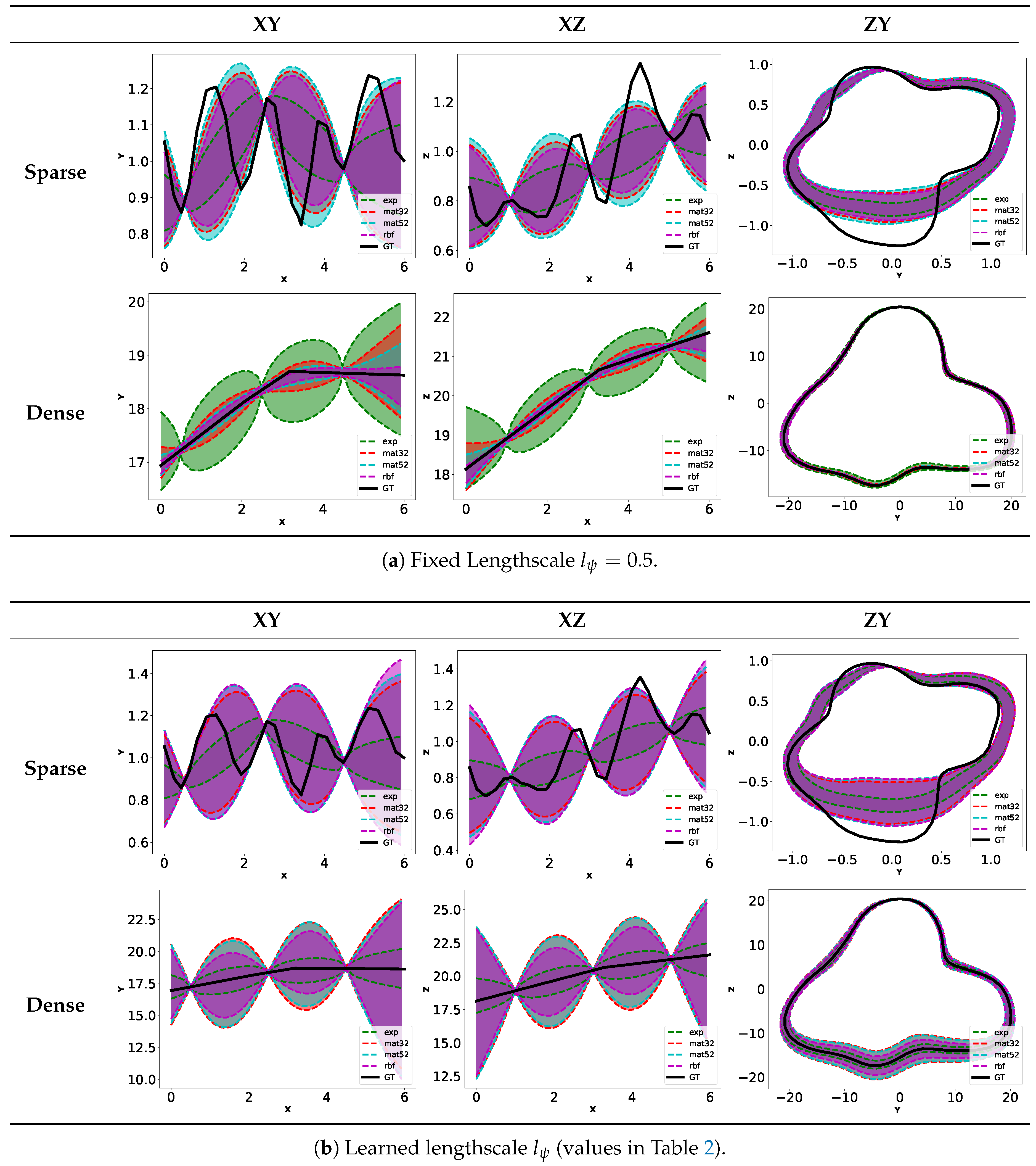
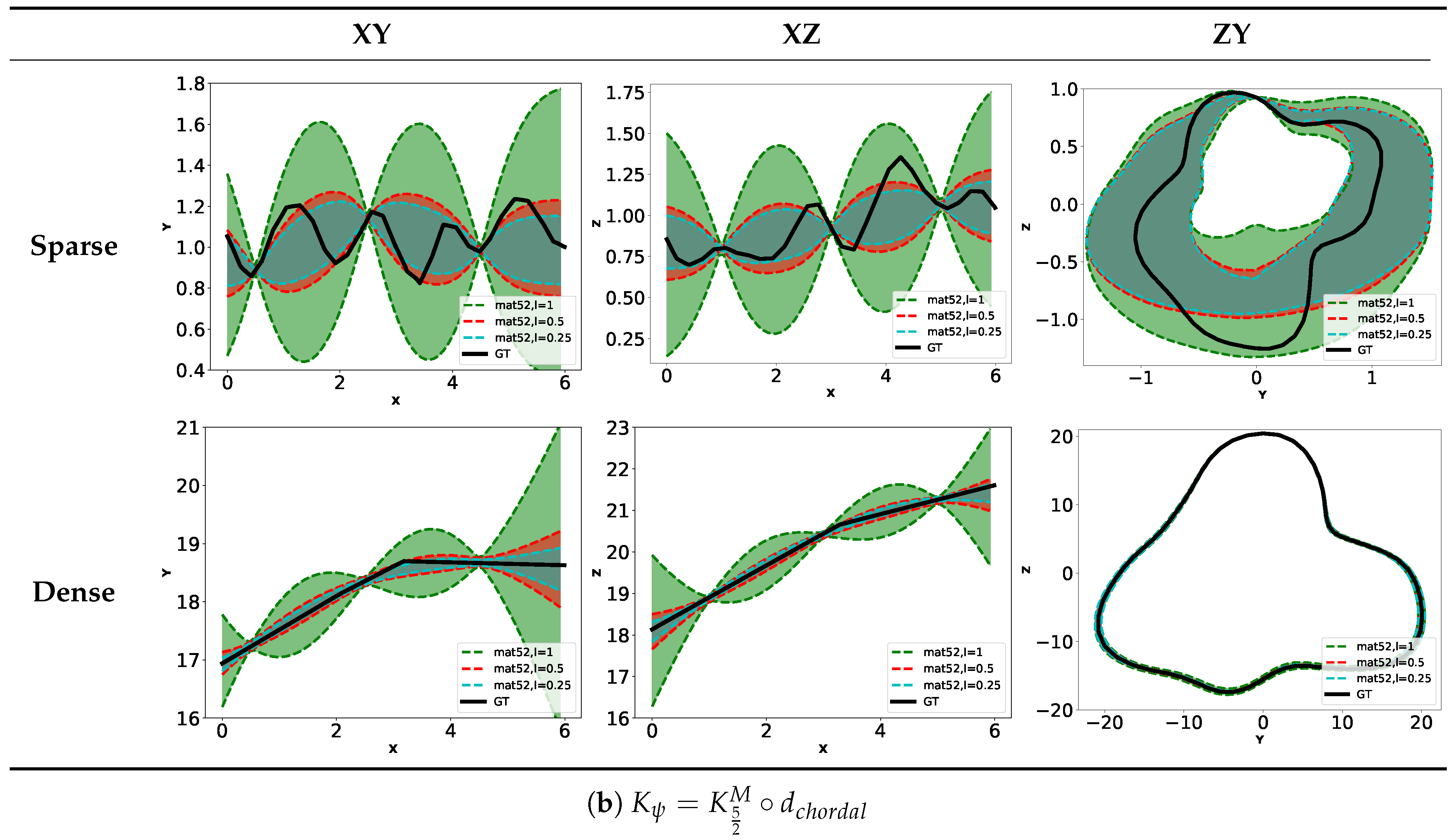
4.2.2. Gaussian Process Regression and Kernel Choices
In this section, we explain the choice of kernels for the following Gaussian process regression. Based on our formulation of the surface through the functional
f (cf.
Section 4.1), we exploit its cylindrical structure by combining a kernel on the trajectory abscissa and a kernel on the sonar rotation angle:
can be any kernel as proposed in
Section 3.4. For
, as we deal with angles, we cannot use a simple euclidean distance. When choosing the metric to use, we have to ensure that the resulting kernel is positive definite [
34,
35]. We can define two distance
and
based respectively on the chordal distance and the geodesic distance on
:
In [
35], it is shown that for geodesic distance
a
-Wendland function [
36] can be used to define a valid kernel
For , any kernel can be used.
In this paper, we only consider exponential and Matern52 kernels with chordal distance for angles. In the experimental section, we investigate the effects of those different kernels and distances on the surface estimation.
4.2.3. Maximum Likelihood Estimation of
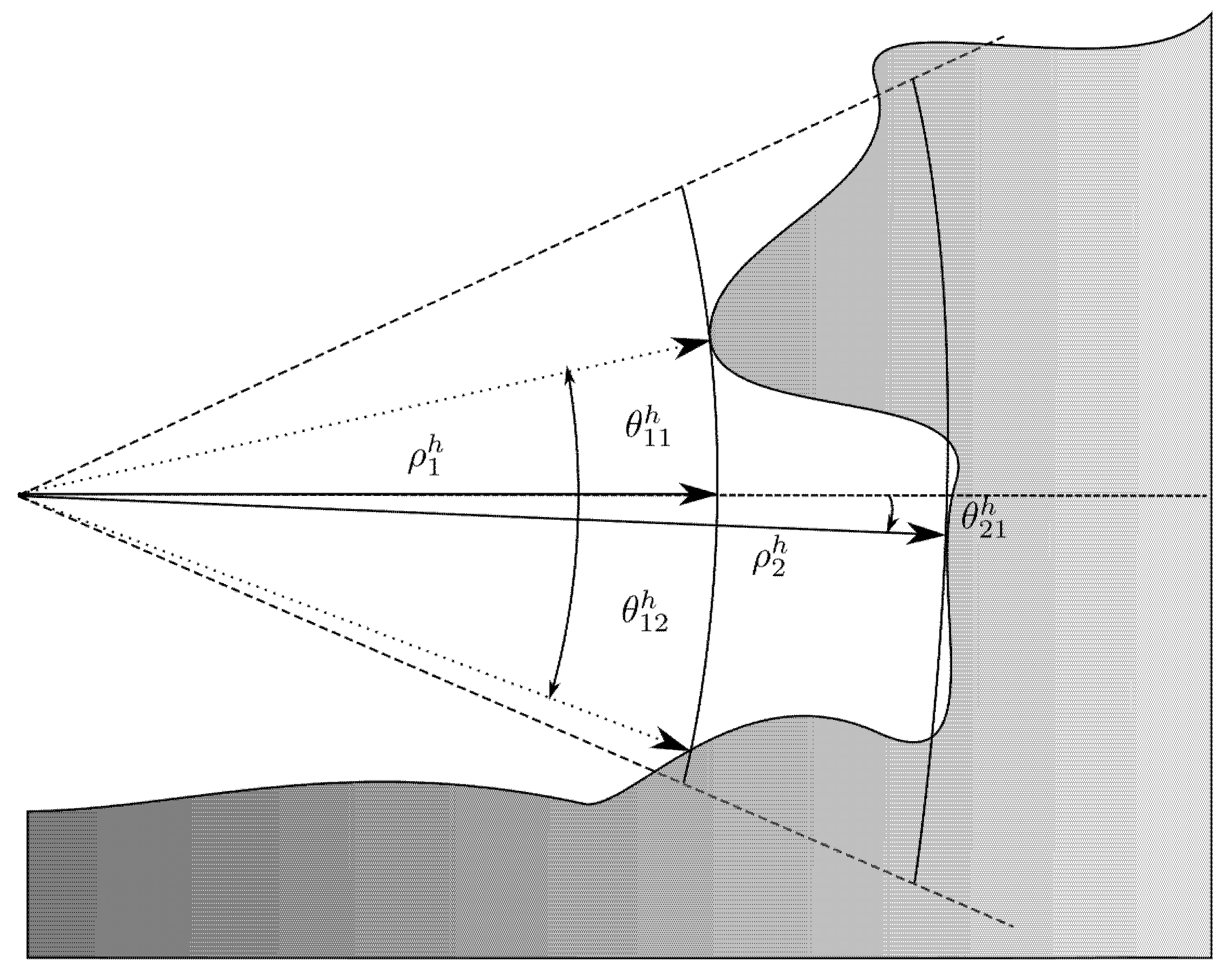
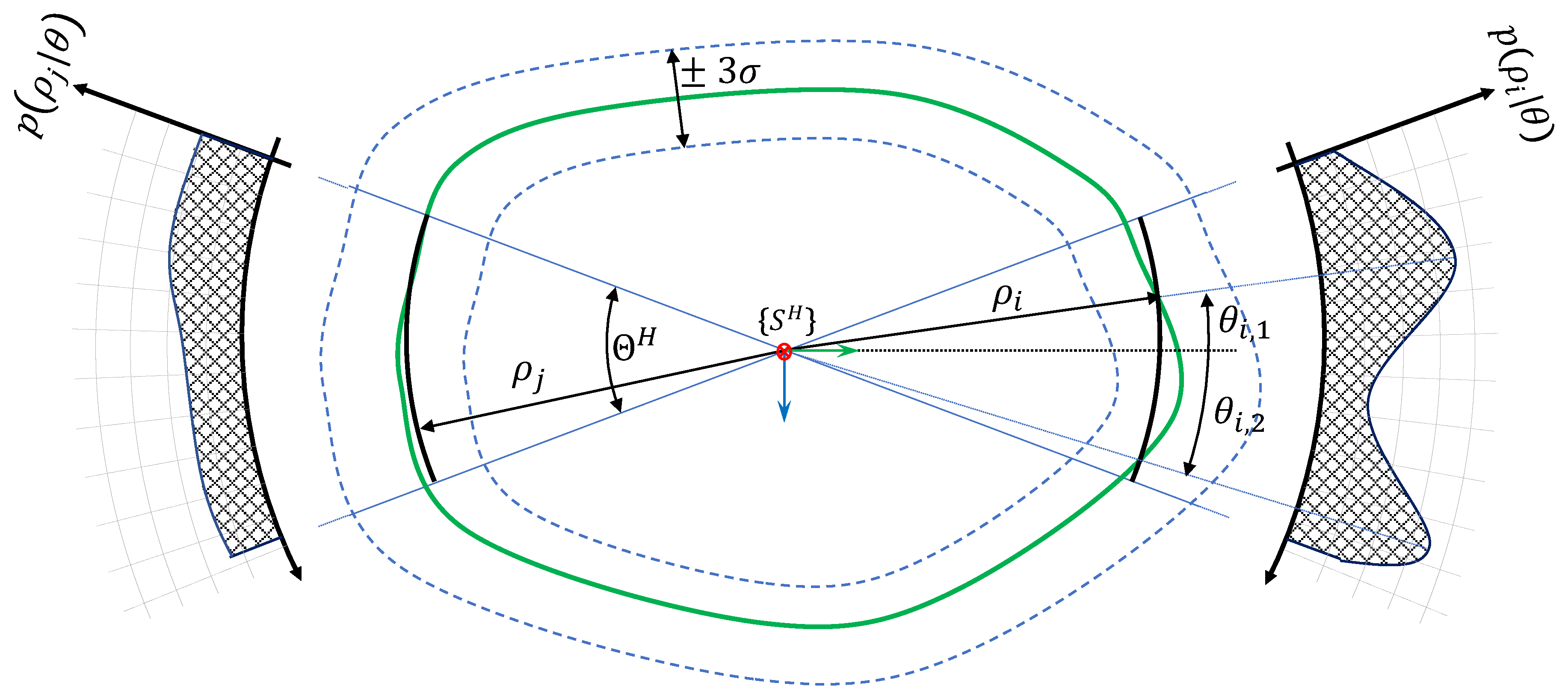
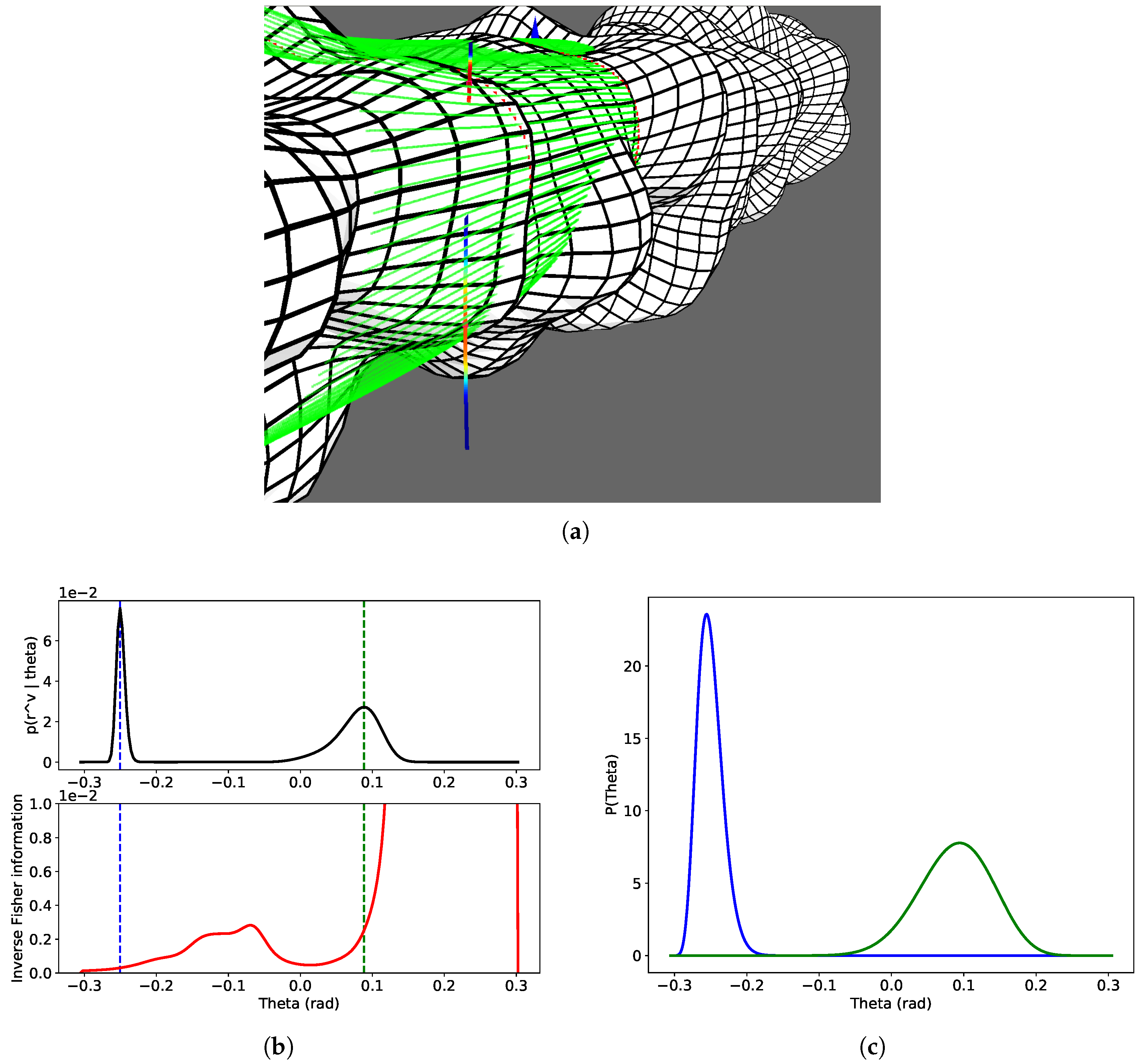
Originally, we cannot obtain the 3D points observed by the horizontal sonar as any point in its beam may return the same measurement. We exploit the estimated surface by the vertical sonar to infer the elevation angles
for each horizontal sonar measurements. The idea is that elevation angles corresponding to 3D points near the estimated surface are good estimate. This is illustrated in
Figure 6. Hence, for each horizontal sonar measurement
, we search for the elevation angles solutions of:
where
is the estimated range we would have obtained if this point was observed by the vertical sonar. In fact, depending on the environment configuration, several angles can correspond to one measure as previously illustrated in the
Figure 4. Thus, instead of solving Equation (
18), we search for local log-maximum likelihood values
:
The corresponding algorithm is described in Algorithm 2 and detailed in the following.
As it is difficult to obtain a closed-form expression of
relative to
, we uniformly sample
values in the range
. In practice,
where
b is the beam vertical aperture. We denote those samples
. For each sample
, we compute the corresponding virtual 3D points
with
defined by Equation (
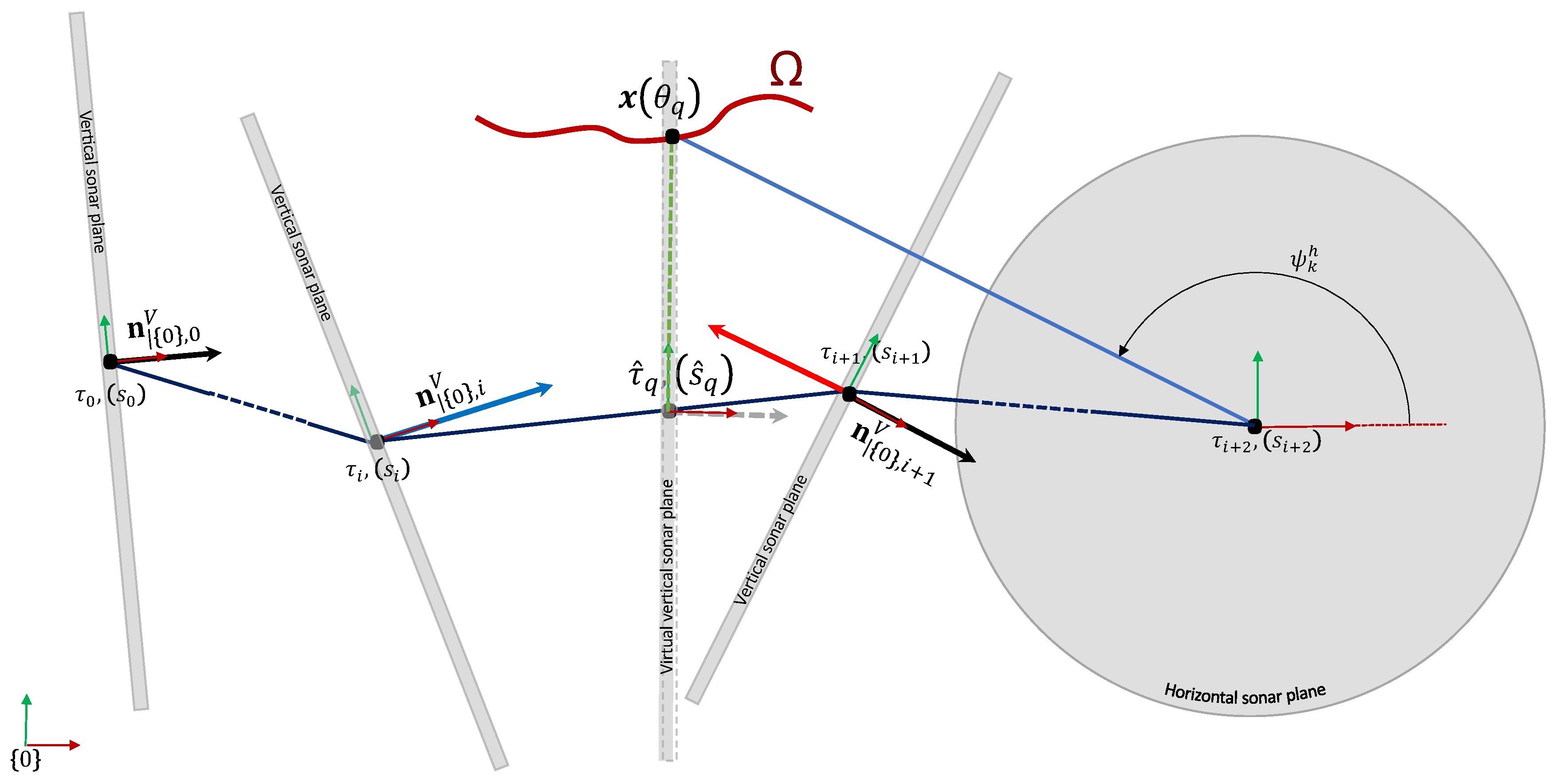
1). To assess the likelihood of having measured this point on the surface, we need to use the previously trained GP model
f. We therefore have to express this point in terms of
f inputs and output. In other words, we need the curvilinear abscissa
, the rotation angle
and range
as if the point was virtually seen by the vertical sonar. This is illustrated in
Figure 7.
To obtain those parameters, we proceed as follows. First, let us denote
the rotation axis of the vertical sonar expressed in its local frame. It is also the normal vector of the sonar plane. We are searching a pose
along the trajectory such that
belongs to the vertical sonar plane. To do so, we need to interpolate the robot trajectory. The first step is to determine in which segments of the trajectory
could belong to (several segments can be found). We recall that we note the global robot position by
and its orientation by the quaternion
. The vertical sonar orientation quaternion is also defined by
. The rotation axis of the vertical sonar expressed in the global frame
when the robot is in its
i-th pose
is given by
A segment (represented by indexes
) is considered if the projection of the vector
on the vertical rotation axis
has a change of sign between the beginning and end of the segment (
Figure 8). Indeed, thanks to the intermediate value theorem, such a segment contains the pose for which the projection is null. Formally, we consider the set
of starting index such that
For each selected segment
, we denote
the linear interpolation between the poses
and
.
is defined by the first three coordinates of
and is simply given by
Let define the relative angular pose express in yaw–pitch–roll Euler angles between
and
:
We then have the associated interpolated rotation matrix
:
The global rotation matrix
is given by
We can now define the linear interpolation of the vertical sonar rotation axis
:
We search for the interpolation value
such that
belongs to the sonar plane with normal
, that is
We assume small angle variation so that we can approximate
to the first order
is the root in
of the following order 2 polynomial expression
We then have
the robot pose corresponding to the computed
. We can now compute the curvilinear abscissa
corresponding to
To compute
, we express
in the vertical sonar frame coordinates corresponding to the robot pose
Finally, the estimated range
is simply the L2 norm of
We can now compute the log-likelihood
The expressions for Equation (
35) can be found in ([
23], p17 Equation (2.25/2.26)) and are obtained using the GP regression trained to estimate
f (
Section 3.4).
4.2.4. Estimation Uncertainty
In the previous section, we explained how the set
is obtained. We are also interested in its related uncertainties. In other words, we want to define the probability distributions
. A normal distribution is not adapted as its support is infinite while the width of our horizontal sonar beam is restricted to its aperture. A good choice is a scaled beta distribution [
37] defined by two parameters
In our case, we consider
where
b is the horizontal sonar beam width. We then have the following probability density function
where
is the gamma function which extends the factorial function to complex numbers and is defined by
For each estimated
from the previous section, the parameters
can be computed from a given mean
and variance
:
In our case, the mean is simply the estimated
ie
. The variance
requires more computation and is estimated as the inverse of the Fisher information
:
Direct computation of Equation (43) gives us (see
Appendix A for the derivation):
Note that a uniform distribution can still be represented by a beta distribution with shape parameters
. Indeed, from Equations (
39) and (
38) we have
which is the density probability for a uniform distribution on
.
We now define a threshold
to filter out variances
leading to invalid Beta distribution parameters . First, the parameters
of a Beta distribution must be strictly positive:
Furthermore, as we consider each distribution as unimodal, we must have
or
. (In the case
, the beta distribution is bimodal with modes at
. A mode corresponds to a local maxima of a probability density function (pdf).) From the expressions (
40) and (
41), we have
It is also easy to verify that the first constraint
is included in the second as we have
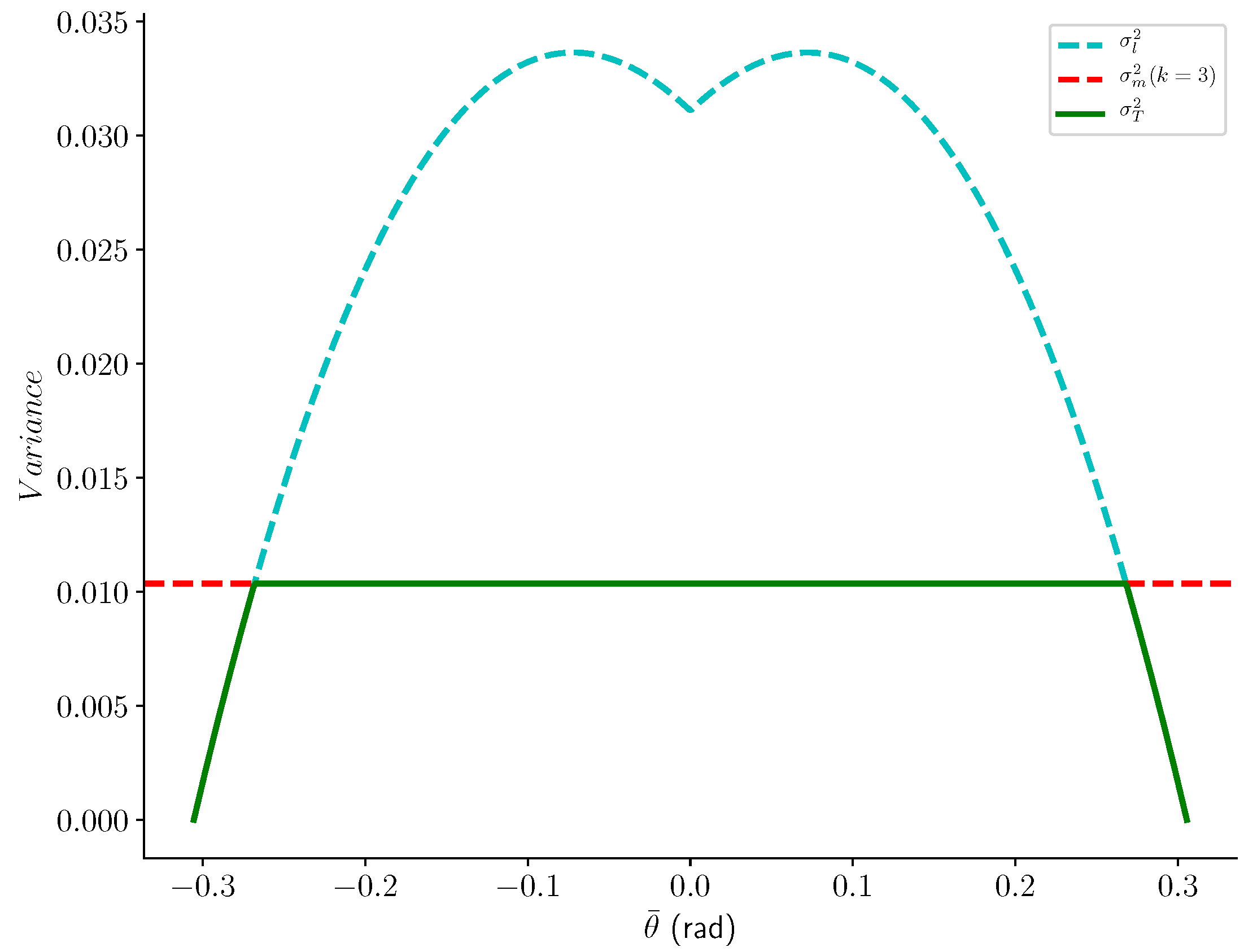
We also add another threshold
to filter out valid but too uncertain estimations. It is defined by
The parameter
k controls the filter sensibility, with higher values being more restrictive. In our implementation, we used a default value
. The final threshold
is then
Figure 9 shows the graphs of
and
.
Figure 10 illustrates the uncertainty estimation process. The colors used to represent the beta distributions directly on the measurement arc are obtained through the following mapping
Note that the central color (turquoise) is obtained for , which is the pdf for a uniform distribution.
| Algorithm 1 Scan merging. |
| Input: Sonar measurements , , Robot trajectory H |
| Output: Estimated horizontal measurements |
| 1: | ▹ Curvilinear abscissa, Equation (12) |
| 2: | ▹ Surface prior |
| 3: | ▹Surface Estimation by Gaussian Process |
| 4: for each do | ▹ Estimation |
| 5: | ▹ See Algorithm 2 |
| 6: for do |
| 7: |
| 8: end for |
| 9: end for |
| Algorithm 2 Elevation angle MLE. |
| Input: Trained surface GP f, a horizontal sonar measure , robot trajectory H and the corresponding curvilinear abscissa , Rotation axis of vertical scan expressed in the vertical sonar frame , Number of samples |
| Output: Estimated local maximum elevation angles |
| 1: | , |
| 2: | forqdo |
| 3: | |
| 4: | | ▹ Equation (20) |
| 5: | |
| 6: | for do |
| 7: | | ▹ Equation (21) |
| 8: | if then | ▹ Equation (22) |
| 9: | |
| 10: | end if |
| 11: | end for |
| 12: | |
| 13: | | ▹ Maximum likelihood value |
| 14: | for do |
| 15: | |
| 16: | |
| 17: | |
| 18: | | ▹ Equations (28) and (30) |
| 19: | |
| 20: | | ▹ Equation (32) |
| 21: | | ▹ Equation (31) |
| 22: | | ▹ Equation (33) |
| 23: | | ▹ Equation (34) |
| 24: | | ▹ Equation (36) |
| 25: | if then |
| 26: | |
| 27: | |
| 28: | end if |
| 29: | end for |
| 30: | if then | ▹ , Equation (19) |
| 31: | |
| 32: | end if |
| 33: | end for |
| Algorithm 3 Uncertainty estimate. |
| Input: Likelihood , local maximum likelihood , beam width b |
| Output: Posterior |
| 1: | ▹ Fisher information Equation (43) |
| 2: |
| 3: | ▹ Beta distr. parameters |
| 4: if then | ▹ Equation (52) |
| 5: |
| 6: |
| 7: end if |
| 8: |






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}