GNSS/IMU/ODO/LiDAR-SLAM Integrated Navigation System Using IMU/ODO Pre-Integration


Abstract
:1. Introduction
2. Materials and Methods
2.1. Coordinate System
- (1)
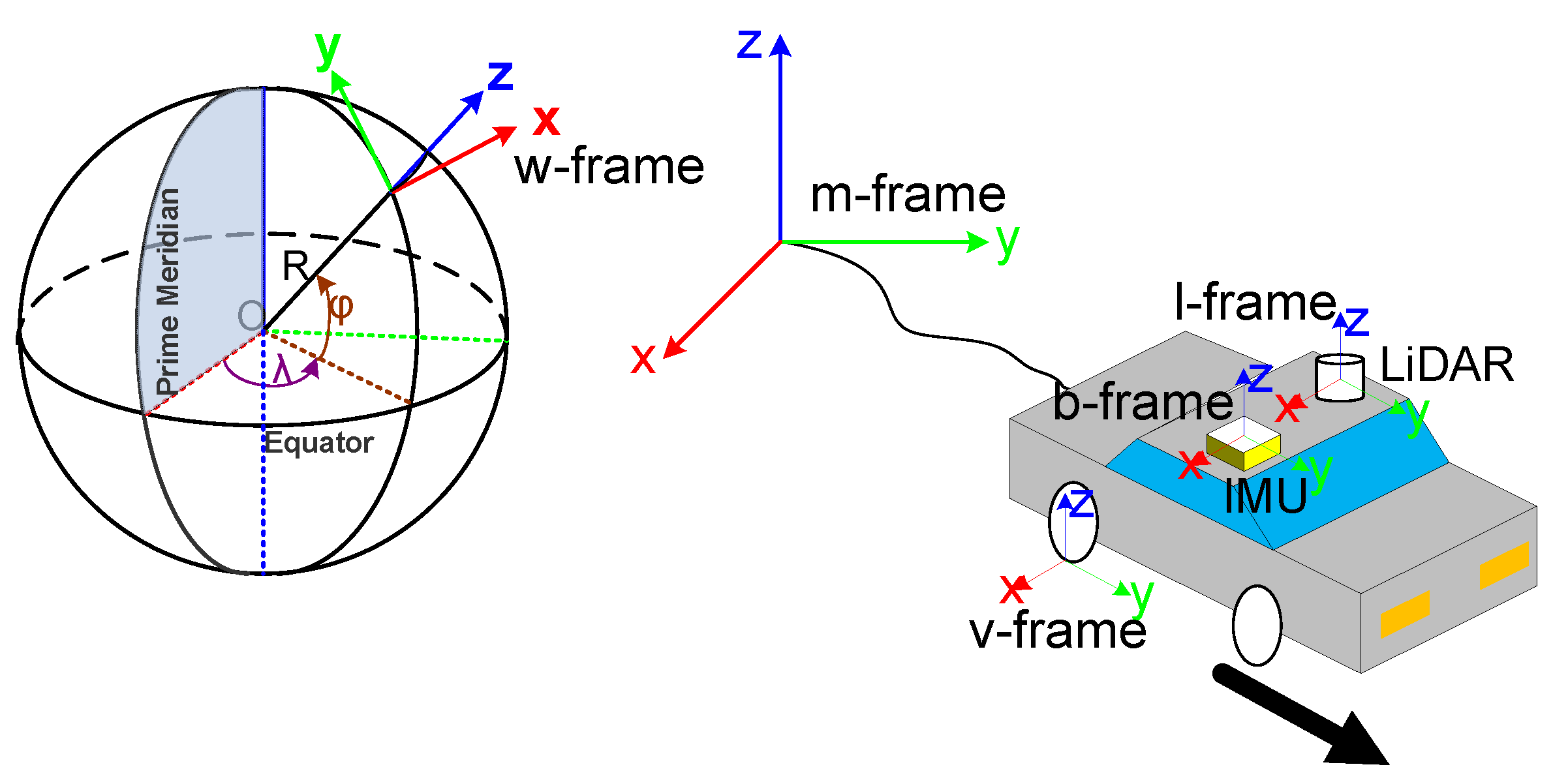
- b-frame: The coordinate system of the IMU with the IMU center as the origin, the X-axis pointing right, the Y-axis pointing forwards and the Z-axis pointing up.
- (2)
- l-frame: The coordinate system of the LiDAR with the LiDAR center as the origin, the X-axis pointing right, the Y-axis pointing forwards, and the Z-axis pointing up.
- (3)
- v-frame: The coordinate system of the vehicle with the tangent point of the wheel where the odometer installed to the ground as the origin, the X axis pointing right, the Y axis pointing forwards, and the Z-axis pointing up.
- (4)
- w-frame: The coordinate system of the GNSS positioning results with the initial GNSS position as the origin, the X-axis pointing east, the Y-axis pointing north, and the Z-axis pointing up.
- (5)
- m-frame: The coordinate system of LiDAR-SLAM with the initial SLAM position as the origin and the coordinate axis coinciding with the b-frame on initialization.
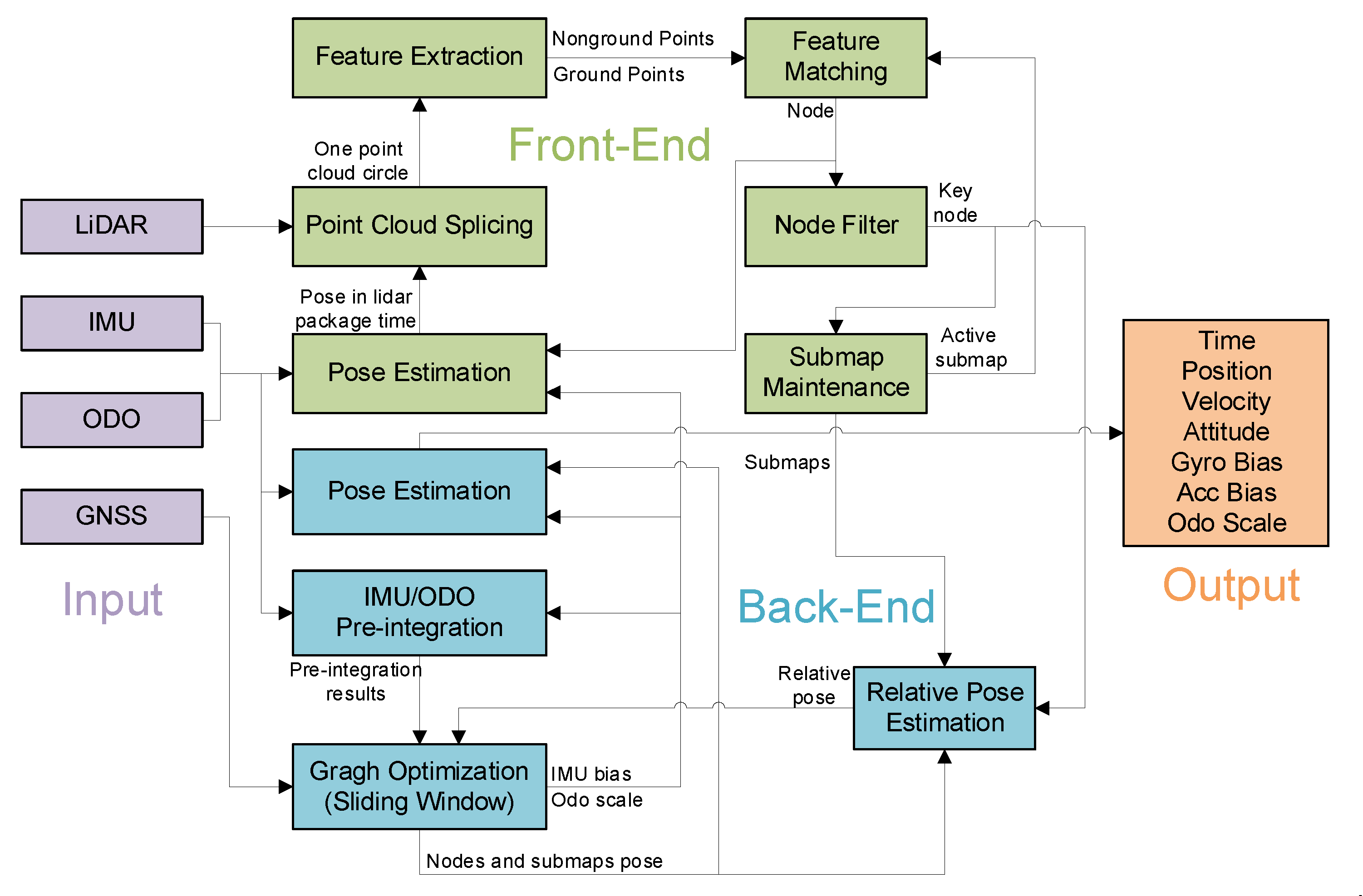
2.2. Front-End
2.2.1. Pose Estimation
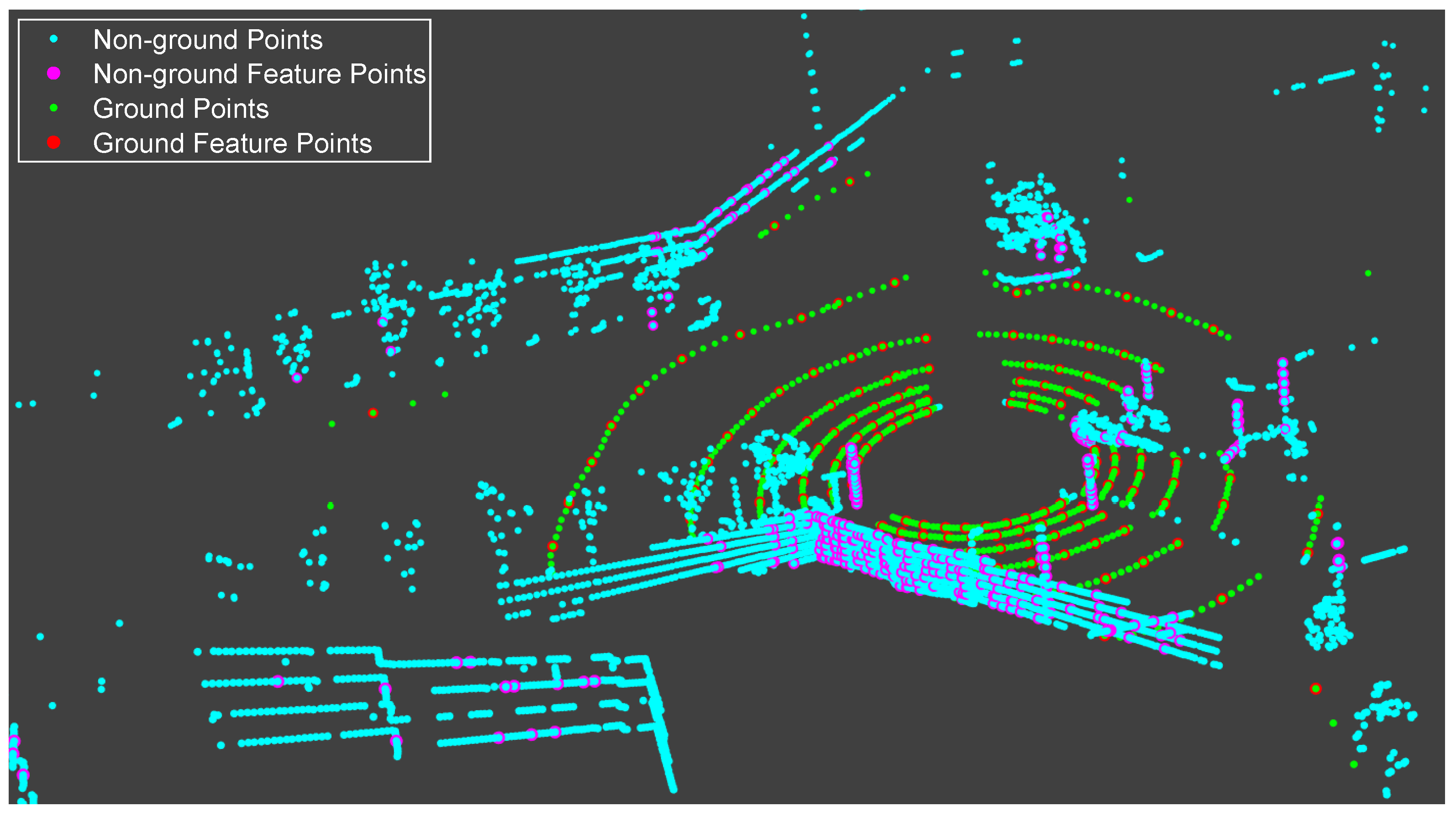
2.2.2. Feature Extraction
2.2.3. Submap Maintenance
2.2.4. Feature Matching
- (1)
- Ground Point Matchwhere K is the number of ground feature points contained in the node; is the k-th point’s position in l-frame; nk, dk are the plane normal and plane distance obtained by fitting all points with a radius of 0.5 m around the k-th ground feature point.
- (2)
- Probability Map Matchwhere K is the number of non-ground feature points contained in the node; Map is the mapping function from the coordinates of the point in the 2D probability map to the probability value [10].
2.3. Back-End
3. Tests
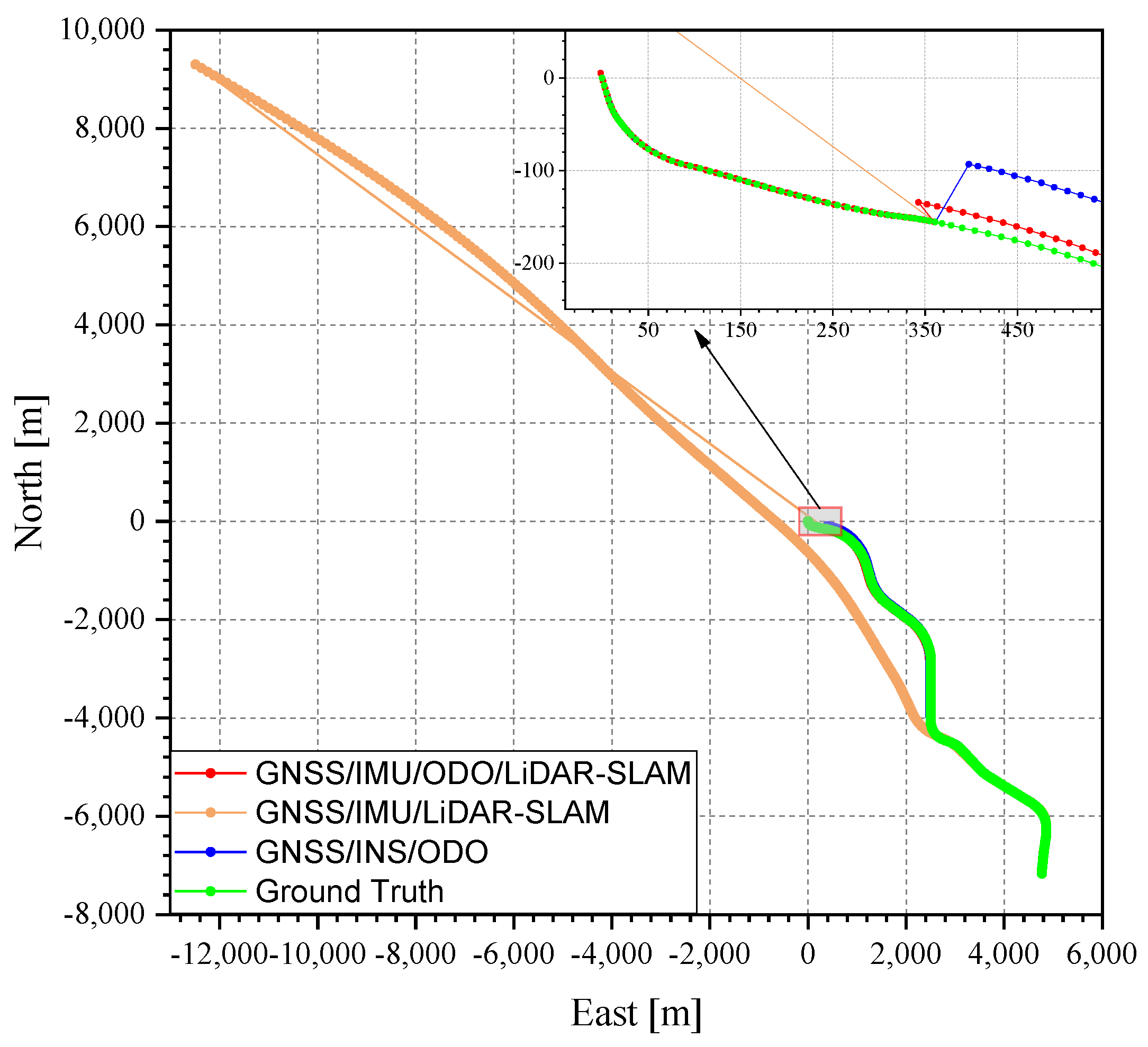
- (1)
- GNSS/INS/ODO: the GNSS/INS integration method with the odometer and NHC constraint, to show the contribution of the LiDAR-SLAM.
- (2)
- GNSS/IMU/LiDAR-SLAM: the proposed integrated method but without the odometer assistance, to show the contribution of adding the odometer into the pre-integration.
4. Results and Discussion
- (1)
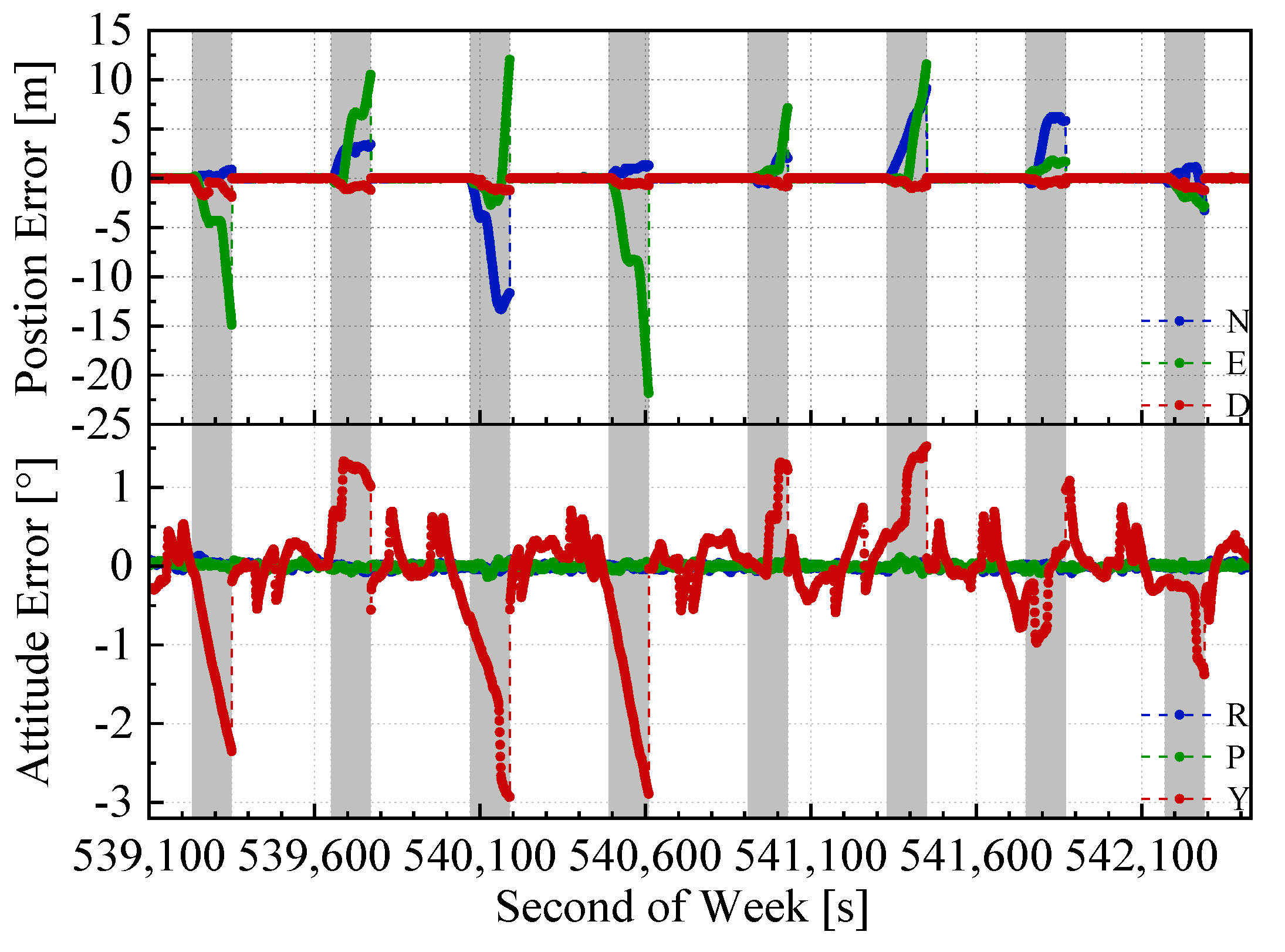
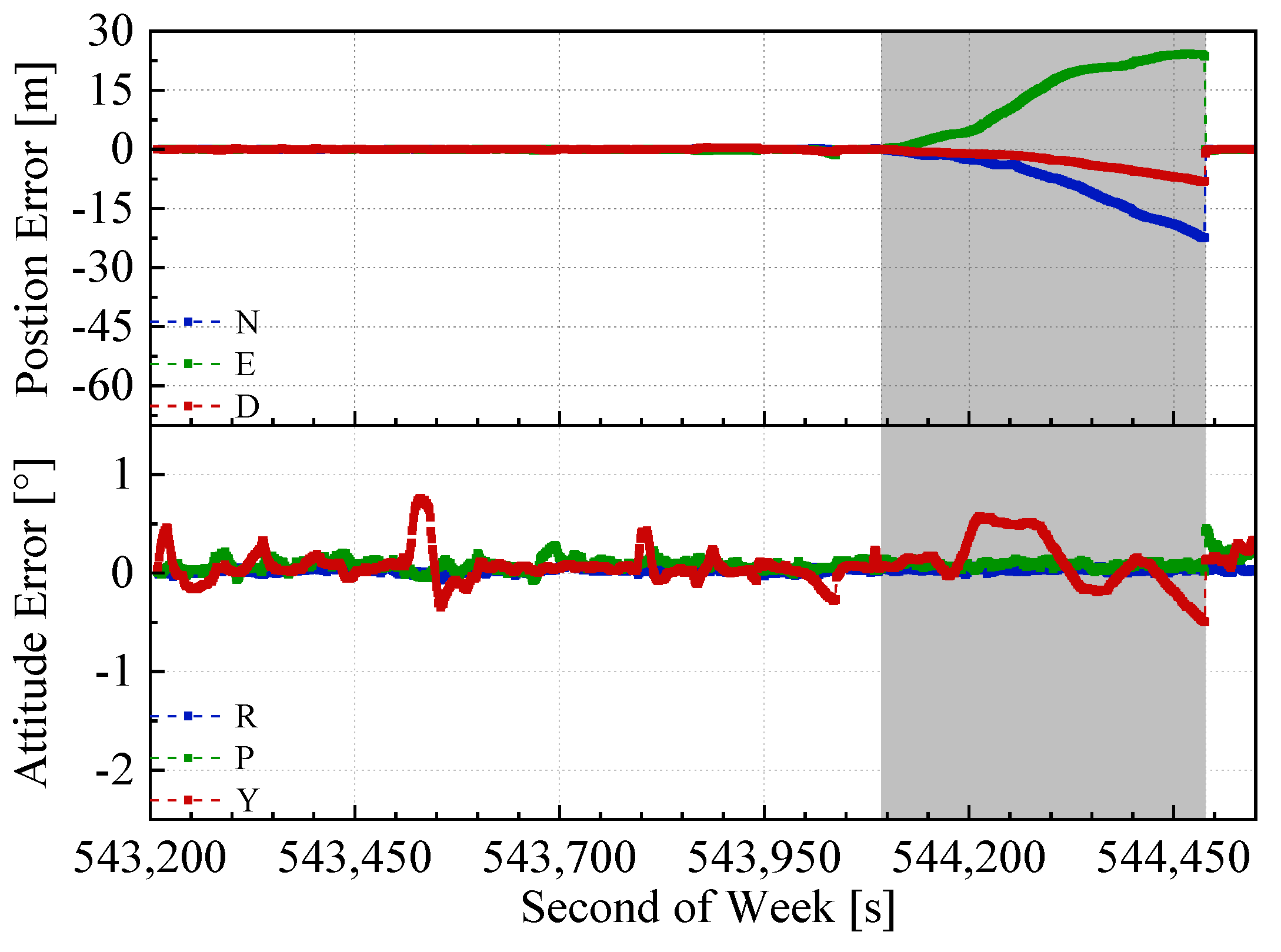
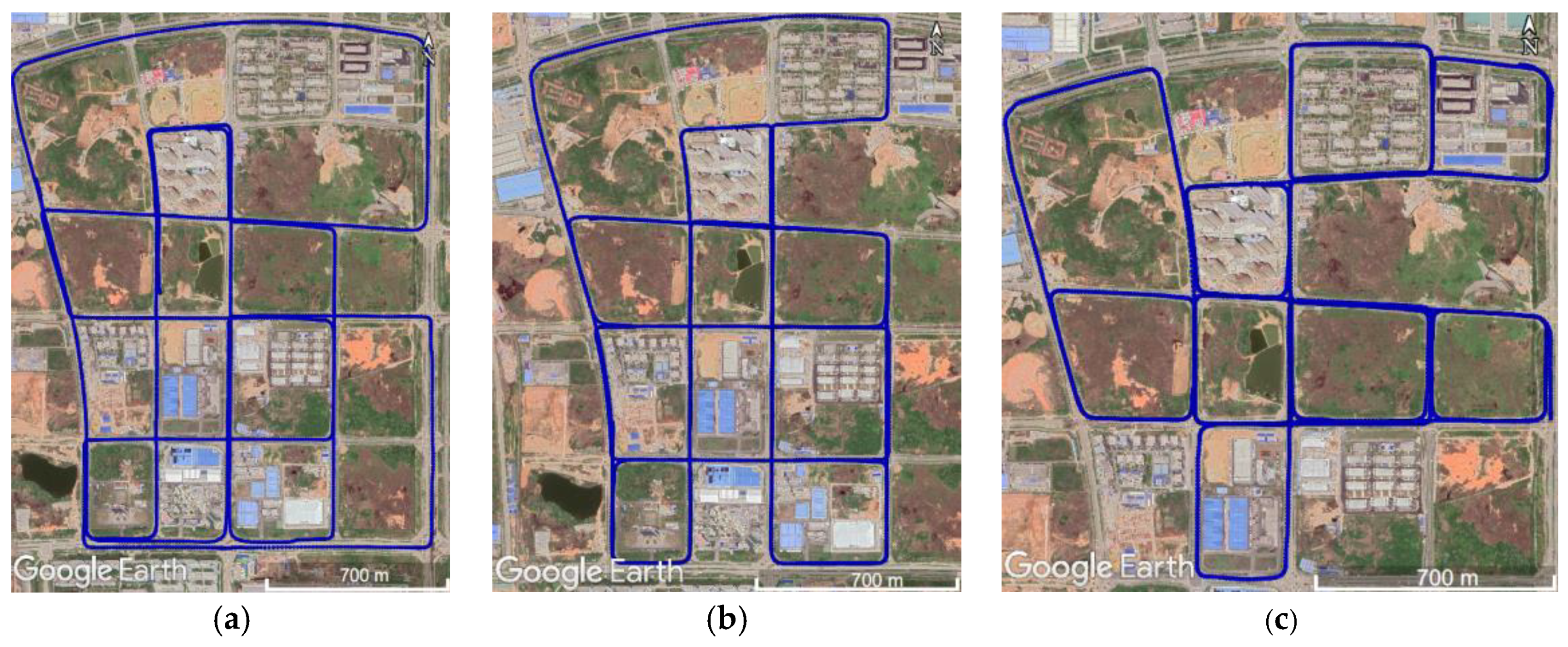
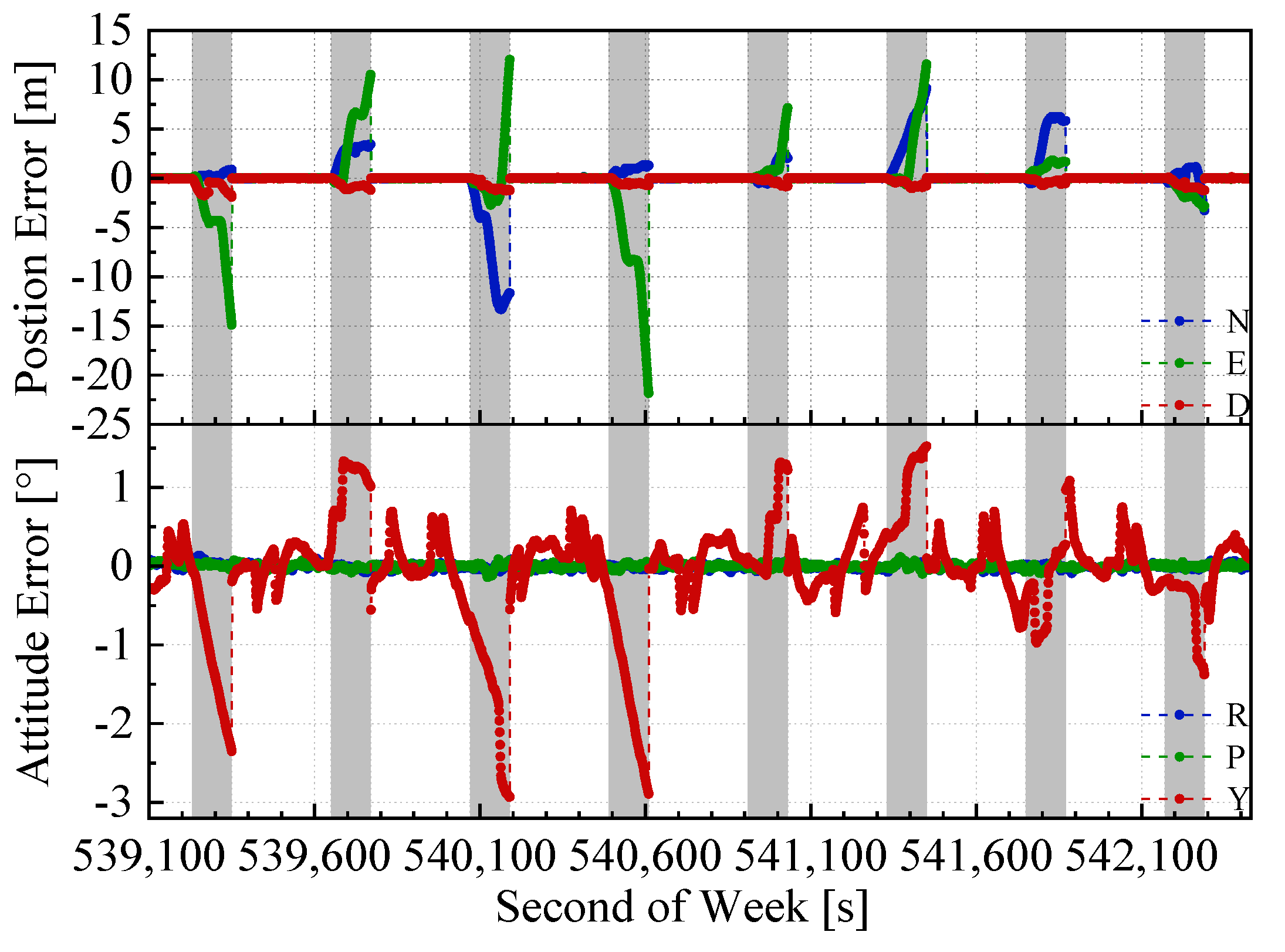
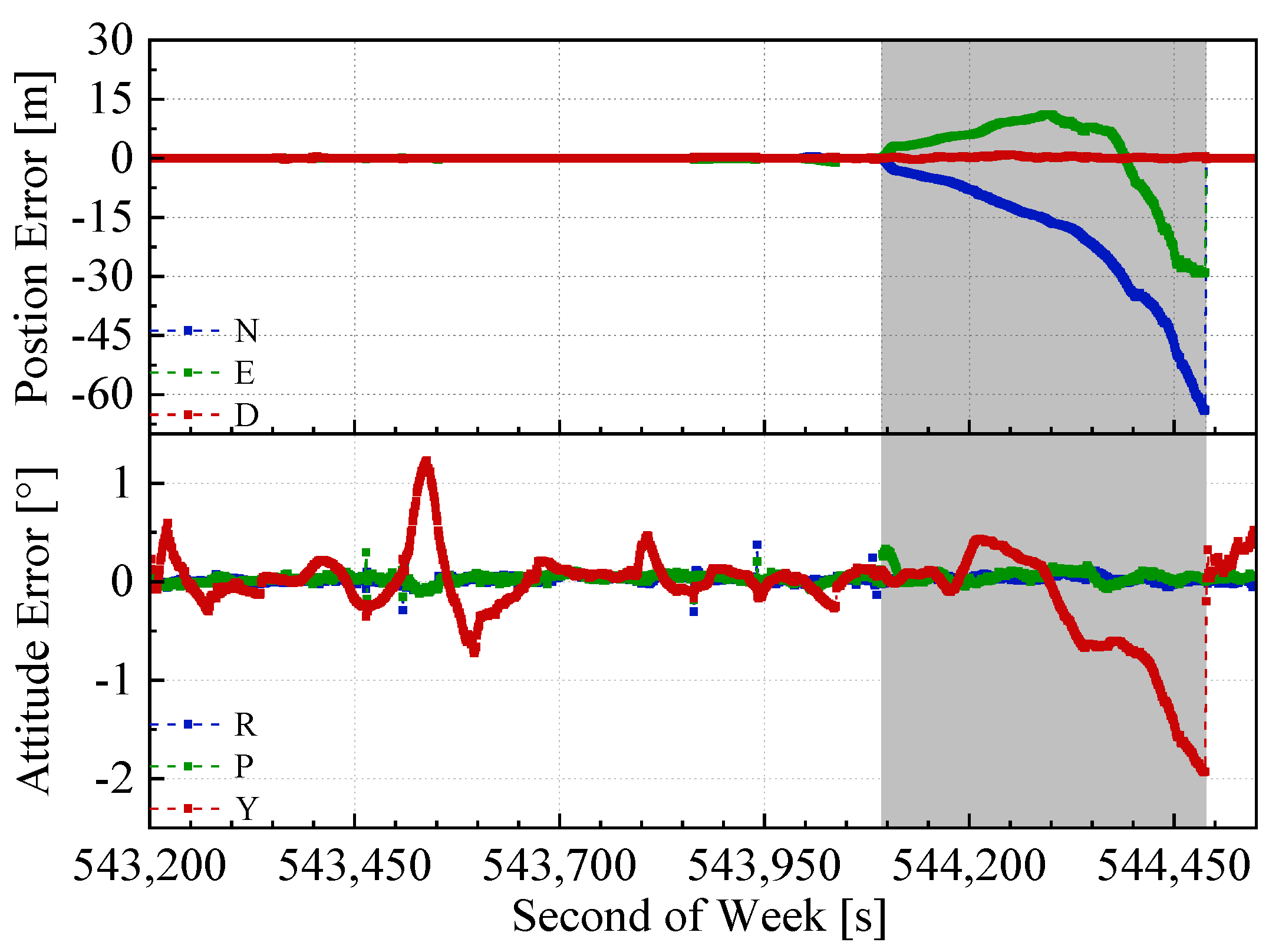
- The GNSS/INS/ODO integrated navigation system had the largest navigation errors, especially for heading errors. During the 1st, 3rd, and 4th outages in the figures, when the vehicle moved with uniform speed along a straight line, it can be seen that despite with the NHC assistance, the heading error of the GNSS/INS/ODO integrated navigation system was still much larger than the other two methods with LiDAR-SLAM assistance. The LiDAR-SLAM proposed in the paper had a slower drift rate than the INS/ODO dead reckoning trajectory and also maintained the heading estimation effectually during GNSS outages.
- (2)
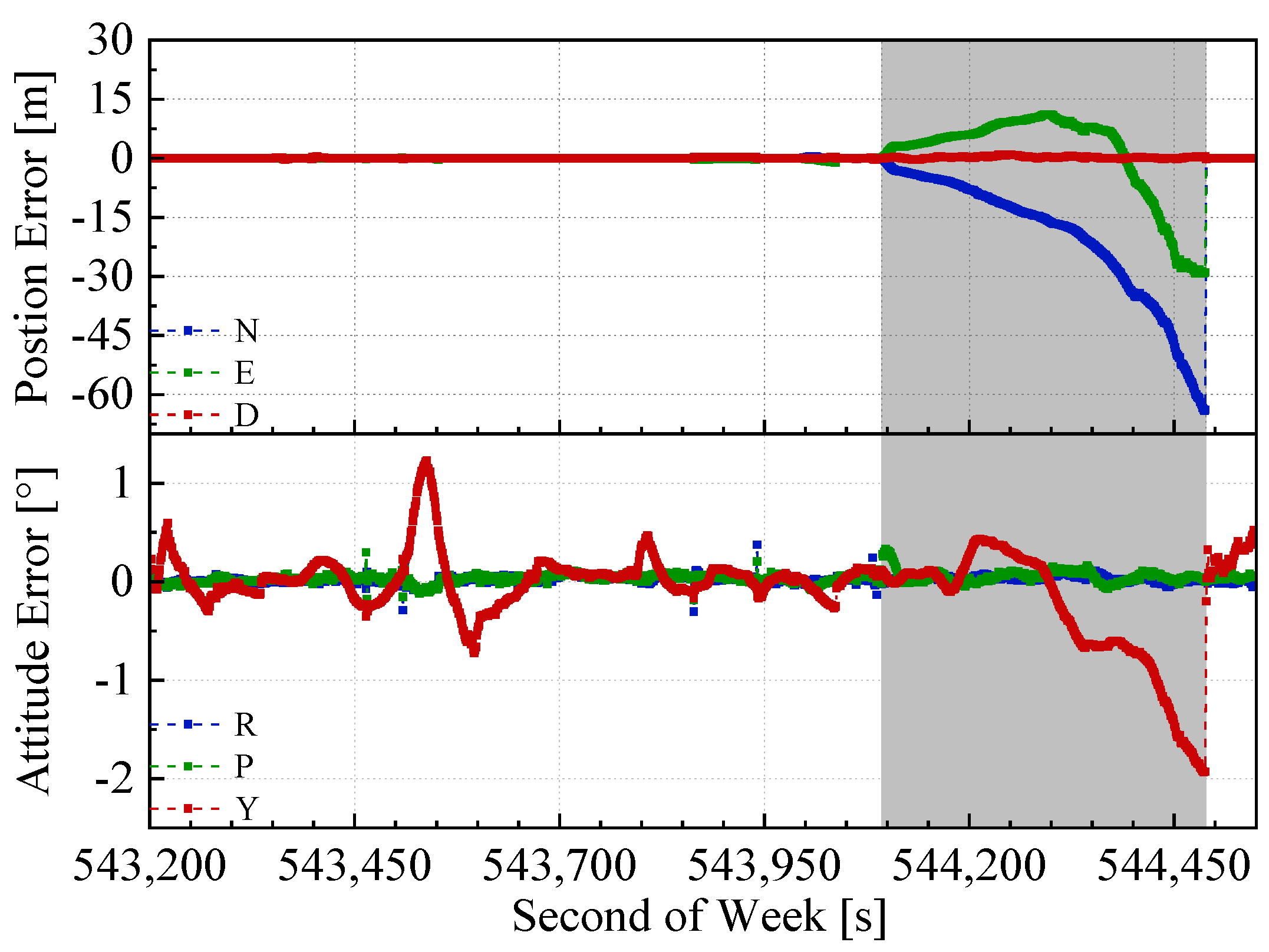
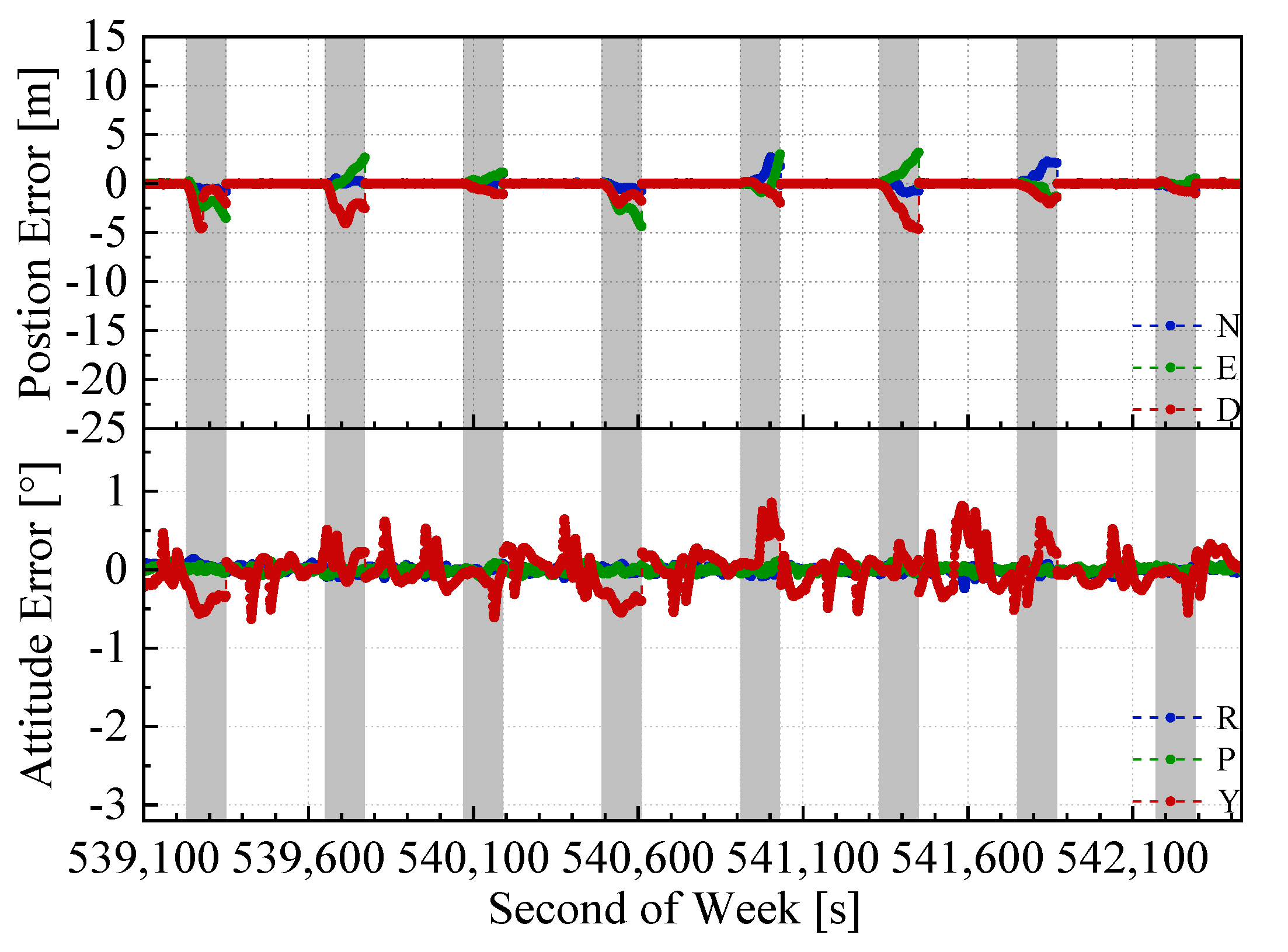
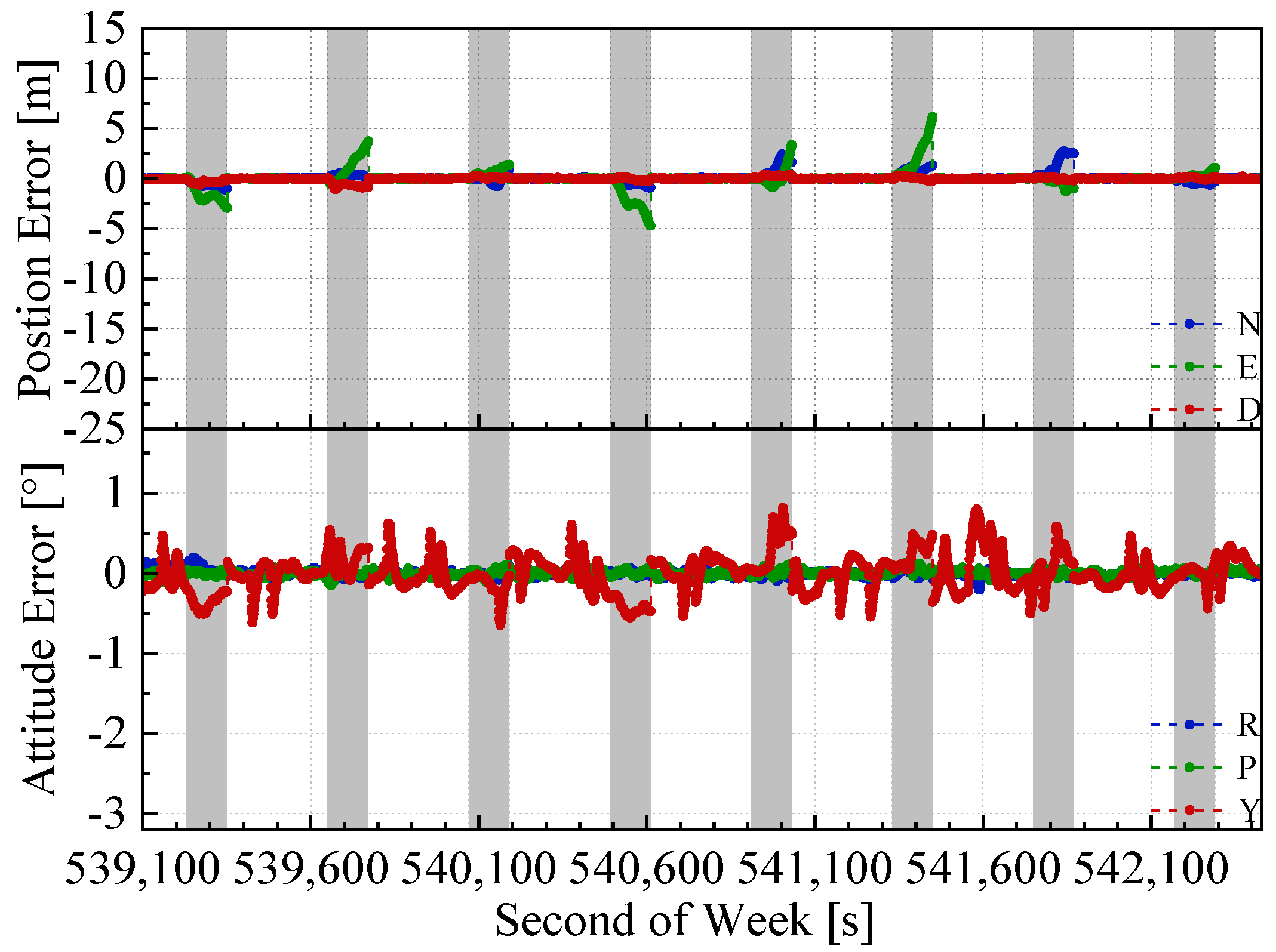
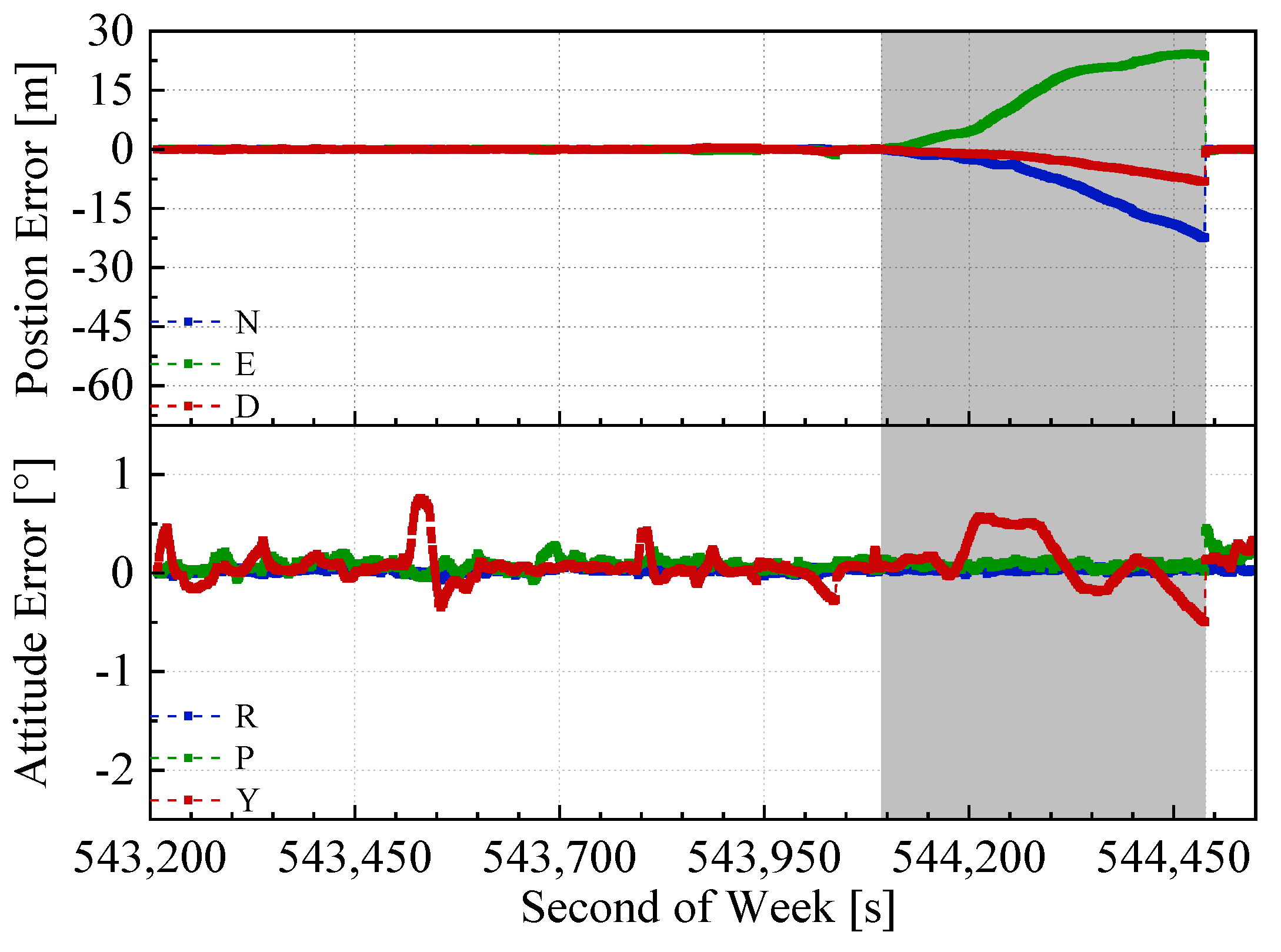
- In the open-sky areas, the surrounding buildings and trees were rich in features and LiDAR-SLAM worked well to maintain the horizontal positioning and attitude. Comparing Figure 9 and Figure 10 shows the contribution of the odometer and NHC. With the presence of good LiDAR-SLAM, the odometer had little effect on attitude and horizontal positioning errors, but the NHC helped reduce height errors significantly.
- (1)
- Compared with the GNSS/INS/ODO integrated navigation system, the position error RMS was reduced by 62.8%, 72.3%, and 52.1%; the heading error RMS was reduced by 62.1%; and the roll and pitch errors were equivalent.
- (2)
- Compared to the GNSS/IMU/LiDAR-SLAM integrated navigation system, the position errors RMS in the north and east directions were equivalent (1.9 m and 2.5 m, respectively). The vertical position error was reduced by 72.3% and the RMS of roll, pitch, and heading errors were equivalent (0.1°, 0.1° and 0.6°, respectively).
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shin, E.-H. Accuarcy Improvement of Low Cost INS/GPS for Land Applications. Master’s Thesis, University of Calgary, Calgary, AB, Canada, 2001. [Google Scholar]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef] [Green Version]
- Martínez, J.L.; González, J.; Morales, J.; Mandow, A.; García-Cerezo, A.J. Mobile robot motion estimation by 2D scan matching with genetic and iterative closest point algorithms. J. Field Robot. 2006, 23, 21–34. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. LOAM: Lidar Odometry and Mapping in Real-time. In Proceedings of the 2014 Robotics: Science and Systems, Berkeley, CA, USA, 12–16 July 2014. [Google Scholar]
- Shan, T.; Englot, B. Lego-loam: Lightweight and ground-optimized lidar odometry and mapping on variable terrain. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4758–4765. [Google Scholar]
- Liu, X.; Zhang, L.; Qin, S.; Tian, D.; Ouyang, S.; Chen, C. Optimized LOAM Using Ground Plane Constraints and SegMatch-Based Loop Detection. Sensors 2019, 19, 5419. [Google Scholar] [CrossRef] [PubMed]
- Censi, A. An ICP variant using a point-to-line metric. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Nice, France, 27 October 2008; pp. 19–25. [Google Scholar]
- Segal, A.; Haehnel, D.; Thrun, S. Generalized-icp. In Proceedings of the 2009 Robotics: Science and Systems, Seattle, WA, USA, 28 June–1 July 2009; p. 435. [Google Scholar]
- Burguera, A.; González, Y.; Oliver, G. On the use of likelihood fields to perform sonar scan matching localization. Auton. Robot. 2009, 26, 203–222. [Google Scholar] [CrossRef]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–20 May 2016; pp. 1271–1278. [Google Scholar]
- Qian, C.; Liu, H.; Tang, J.; Chen, Y.; Kaartinen, H.; Kukko, A.; Zhu, L.; Liang, X.; Chen, L.; Hyyppä, J. An integrated GNSS/INS/LiDAR-SLAM positioning method for highly accurate forest stem mapping. Remote Sens. 2017, 9, 3. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Liu, S.; Atia, M.M.; Noureldin, A. INS/GPS/LiDAR integrated navigation system for urban and indoor environments using hybrid scan matching algorithm. Sensors 2015, 15, 23286–23302. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chiang, K.-W.; Tsai, G.-J.; Li, Y.-H.; Li, Y.; El-Sheimy, N. Navigation Engine Design for Automated Driving Using INS/GNSS/3D LiDAR-SLAM and Integrity Assessment. Remote Sens. 2020, 12, 1564. [Google Scholar] [CrossRef]
- Shamsudin, A.U.; Ohno, K.; Hamada, R.; Kojima, S.; Westfechtel, T.; Suzuki, T.; Okada, Y.; Tadokoro, S.; Fujita, J.; Amano, H. Consistent map building in petrochemical complexes for firefighter robots using SLAM based on GPS and LIDAR. Robomech J. 2018, 5, 1–13. [Google Scholar]
- Kukko, A.; Kaijaluoto, R.; Kaartinen, H.; Lehtola, V.V.; Jaakkola, A.; Hyyppä, J. Graph SLAM correction for single scanner MLS forest data under boreal forest canopy. ISPRS J. Photogramm. Remote Sens. 2017, 132, 199–209. [Google Scholar] [CrossRef]
- Cartographer. Available online: https://github.com/cartographer-project/cartographer (accessed on 9 July 2018).
- Chiang, K.; Tsai, G.; Chu, H.; Elsheimy, N. Performance Enhancement of INS/GNSS/Refreshed-SLAM Integration for Acceptable Lane-Level Navigation Accuracy. IEEE Trans. Veh. Technol. 2020, 69, 2463–2476. [Google Scholar] [CrossRef]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef] [Green Version]
- Chang, L.; Niu, X.; Liu, T.; Tang, J.; Qian, C. GNSS/INS/LiDAR-SLAM Integrated Navigation System Based on Graph Optimization. Remote Sens. 2019, 11, 1009. [Google Scholar] [CrossRef] [Green Version]
- Shin, E.-H.; Estimation Techniques for Low-Cost Inertial Navigation. UCGE Report. May 2005. Available online: https://www.ucalgary.ca/engo_webdocs/NES/05.20219.EHShin.pdf (accessed on 1 September 2015).
- Sukkarieh, S. Low Cost, High Integrity, Aided Inertial Navigation Systems for Autonomous Land Vehicles. Ph.D. Thesis, University of Sydney, Sydney, Australia, 1 January 2000. [Google Scholar]
- Dissanayake, G.; Sukkarieh, S.; Nebot, E.; Durrant-Whyte, H. The aiding of a low-cost strapdown inertial measurement unit using vehicle model constraints for land vehicle applications. IEEE Trans. Robot. Autom. 2001, 17, 731–747. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Wu, M.; Hu, X.; Hu, D. Self-calibration for land navigation using inertial sensors and odometer: Observability analysis. In Proceedings of the AIAA Guidance Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009. [Google Scholar]
- Zhang, S.; Guo, Y.; Zhu, Q.; Liu, Z. Lidar-IMU and Wheel Odometer Based Autonomous Vehicle Localization System. In Proceedings of the Chinese Control and Decision Conference, Nanchang, China, 3–5 June 2019. [Google Scholar]
- Meng, X.; Wang, H.; Liu, B. A Robust Vehicle Localization Approach Based on GNSS/IMU/DMI/LiDAR Sensor Fusion for Autonomous Vehicles. Sensors 2017, 17, 2140. [Google Scholar] [CrossRef] [PubMed]
- Chen, Q.; Zhang, Q.; Niu, X. Estimate the Pitch and Heading Mounting Angles of the IMU for Land Vehicular GNSS/INS Integrated System. IEEE Trans. Intell. Transp. Syst. 2020, 1–13. [Google Scholar] [CrossRef]
- Agarwal, S.; Mierle, K. Ceres-Solver. Available online: http://ceres-solver.org (accessed on 23 March 2018).
- Xiangyuan, K.; Jiming, G.; Zongquan, L. Foundation of Geodesy, 2nd ed.; Wuhan University Press: Wuhan, China, 2010. [Google Scholar]
- Le Gentil, C.; Vidal-Calleja, T.; Huang, S. 3d lidar-imu calibration based on upsampled preintegrated measurements for motion distortion correction. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–26 May 2018; pp. 2149–2155. [Google Scholar]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef] [Green Version]
- Jun, W.; Gongmin, Y. Strapdown Inertial Navigation Algorithm and Integrated Navigation Principles; Northwestern Polytechnical University Press, Co. Ltd.: Xi’an, China, 2016. [Google Scholar]
- Yongyuan, Q. Kalman Filter and Integrated Navigation Principle; Northwestern Polytechnical University Press, Co. Ltd.: Xi’an, China, 2000. [Google Scholar]
- Sibley, G.; Matthies, L.; Sukhatme, G.S. Sliding window filter with application to planetary landing. J. Field Robot. 2010, 27, 587–608. [Google Scholar] [CrossRef]
- Eckenhoff, K.; Paull, L.; Huang, G. Decoupled, consistent node removal and edge sparsification for graph-based SLAM. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 3275–3282. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IMU | Accelerometer | Gyroscope | ||
|---|---|---|---|---|
| Bias Instability [mGal] | Random Walk Noise | Bias Instability [°/h] | Random Walk Noise | |
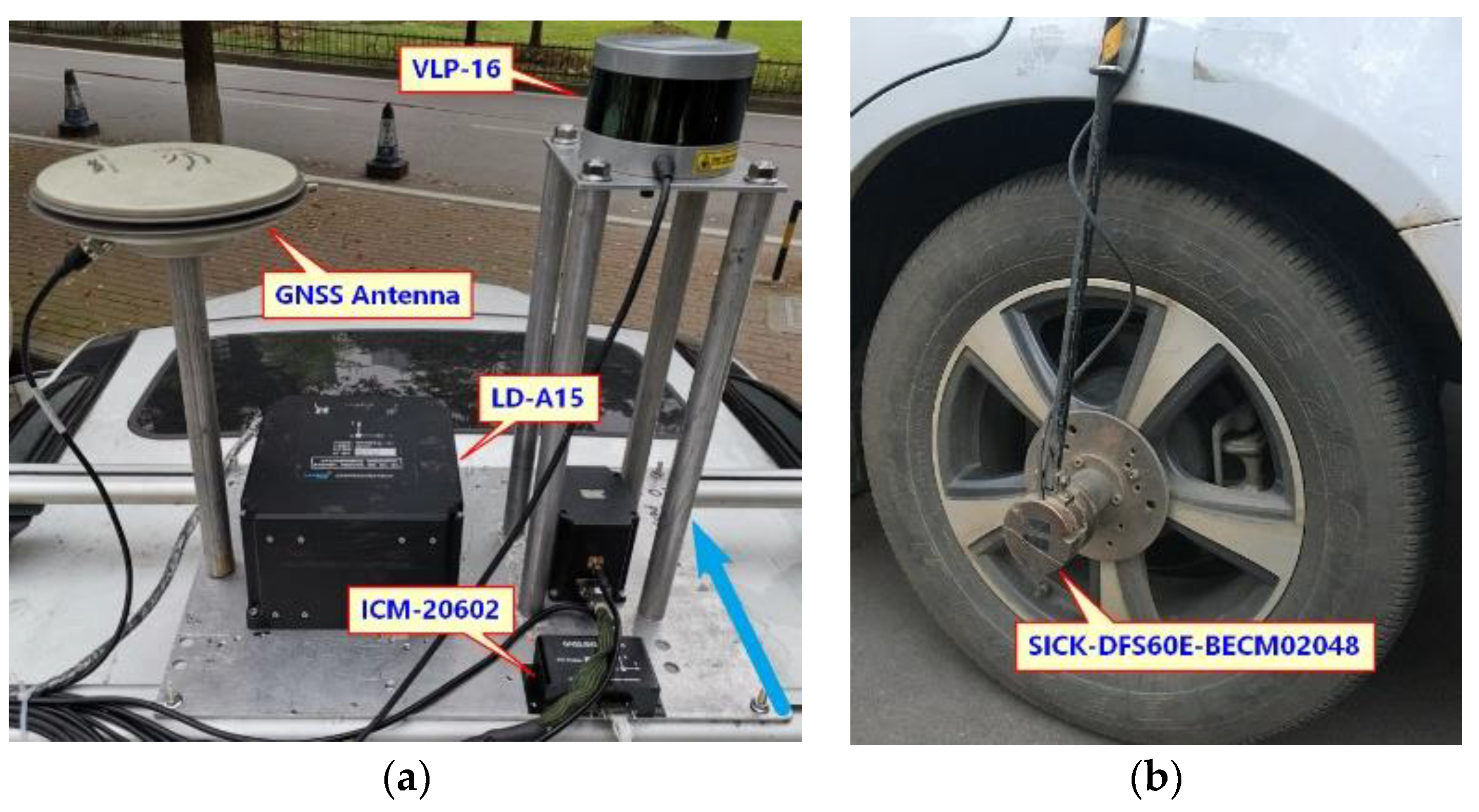
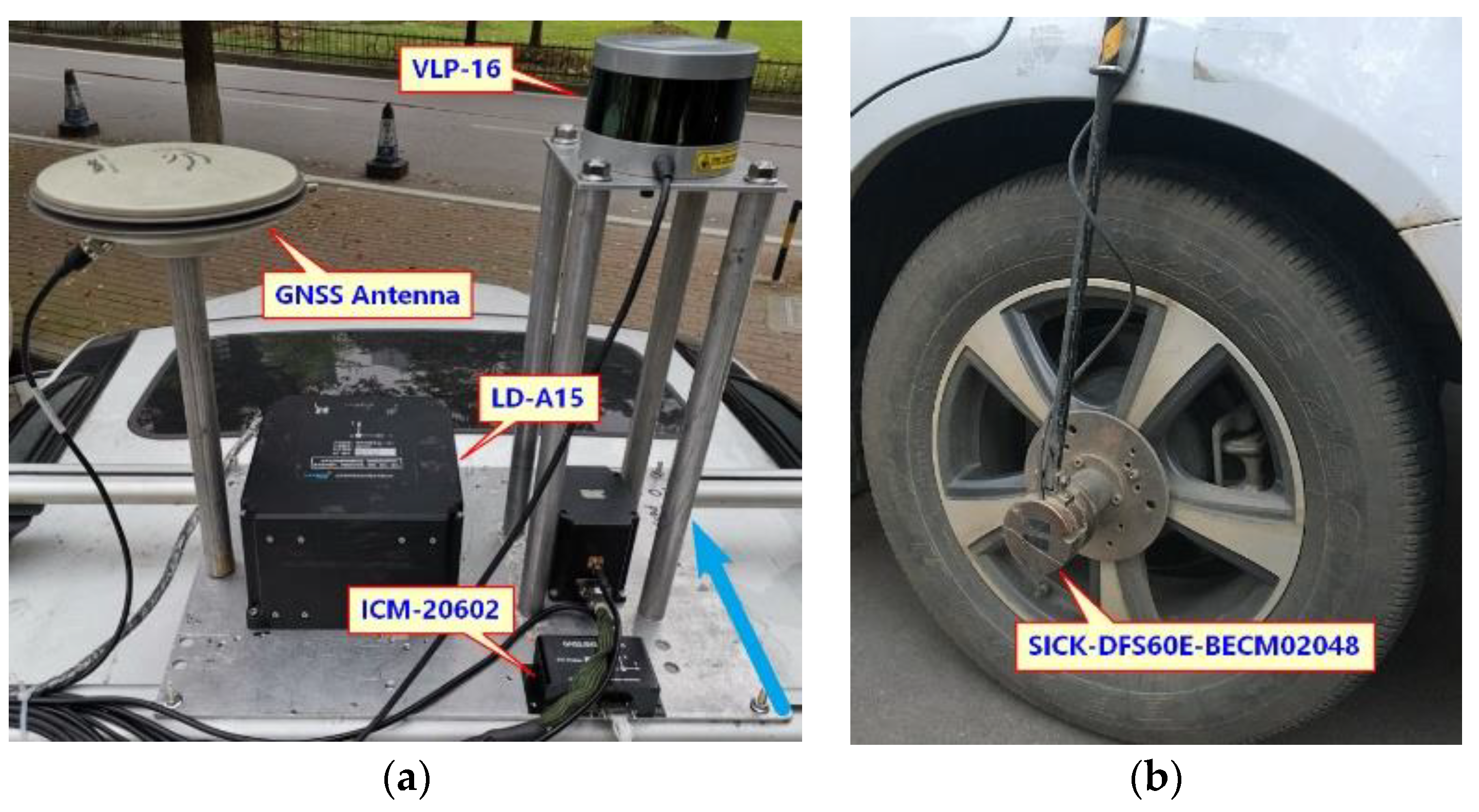
| LD-A15 | 15 | 0.03 | 0.027 | 0.003 |
| ICM-20602 | 250 | 0.24 | 50 | 0.24 |
| Position Error [m] | Attitude Error [°] | ||||||
|---|---|---|---|---|---|---|---|
| N | E | D | R | P | Y | ||
| GNSS/INS/ODO | RMS | 5.2 | 9.1 | 1.1 | 0.11 | 0.10 | 1.59 |
| MAX | 13.3 | 21.8 | 1.9 | 0.22 | 0.20 | 2.93 | |
| GNSS/IMU/LiDAR-SLAM | RMS | 1.9 | 2.5 | 1.9 | 0.13 | 0.11 | 0.60 |
| MAX | 3.6 | 4.4 | 4.6 | 0.33 | 0.19 | 0.99 | |
| GNSS/IMU/ODO/LiDAR-SLAM | RMS | 1.9 | 2.5 | 0.5 | 0.11 | 0.11 | 0.60 |
| MAX | 3.6 | 6.1 | 1.4 | 0.19 | 0.18 | 1.15 | |
| Position Error [m] | Attitude Error [°] | |||||
|---|---|---|---|---|---|---|
| N | E | D | R | P | Y | |
| GNSS/INS/ODO | −63.8 | −28.9 | 0.4 | 0.01 | 0.02 | −1.93 |
| GNSS/IMU/LiDAR-SLAM | 9520.6 | 12993.5 | 1428.9 | −0.80 | 4.86 | 3.50 |
| GNSS/IMU/ODO/LiDAR-SLAM | −22.4 | 23.6 | −8.1 | 0.02 | 0.01 | −0.49 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, L.; Niu, X.; Liu, T. GNSS/IMU/ODO/LiDAR-SLAM Integrated Navigation System Using IMU/ODO Pre-Integration. Sensors 2020, 20, 4702. https://doi.org/10.3390/s20174702
Chang L, Niu X, Liu T. GNSS/IMU/ODO/LiDAR-SLAM Integrated Navigation System Using IMU/ODO Pre-Integration. Sensors. 2020; 20(17):4702. https://doi.org/10.3390/s20174702
Chicago/Turabian StyleChang, Le, Xiaoji Niu, and Tianyi Liu. 2020. "GNSS/IMU/ODO/LiDAR-SLAM Integrated Navigation System Using IMU/ODO Pre-Integration" Sensors 20, no. 17: 4702. https://doi.org/10.3390/s20174702
APA StyleChang, L., Niu, X., & Liu, T. (2020). GNSS/IMU/ODO/LiDAR-SLAM Integrated Navigation System Using IMU/ODO Pre-Integration. Sensors, 20(17), 4702. https://doi.org/10.3390/s20174702